cs, dsps, and fpgas realization technologies for robotics
Post on 21-Dec-2015
232 views
TRANSCRIPT

Cs, DSPs, Cs, DSPs, and FPGAsand FPGAsRealization technologies for roboticsRealization technologies for robotics

In the Beginning,In the Beginning,
• skipping ahead a bit...

EvolutionEvolution• transistors
• gates - SSI ~10 transistors
• flip flops, registers, counters - MSI
• sequencers, ALUs - LSI
• microprocessors - VLSI
• processors - ULSI 107 transistors

•A Micro-controller is an integrated circuit that contains many of the same items that a desktop computer has, such as:
– CPU, memory, etc., but does not include any “human interface” devices like a monitor, keyboard, or mouse.
•Micro-controllers are mostly designed for machine control applications, rather than human interaction.
•Micro-controllers paired with all the peripherals they need to be self-sufficient, such as the Basic Stamp II IC, are sometimes called “single-board computers.”
Micro-controllers and Single-Micro-controllers and Single-board Computers:board Computers:

microControllers - microControllers - CsCs
• Simplified processors/sequencers
• Intended for “embedded”applications– cell phones, VCRs, washing machines,
toaster ovens, etc.– single-chip solutions
• or maybe a few chips...
• Inexpensive (!)– < $1.00 at the bottom end– < $100.00 at the top end

CsCs• Programmable
– but typically only programmed once...
• “reasonable” performance– 4 bit (passe’)– 8 bit, 16 bit– 32 bit (yes, but get real)– 64 bit ? (dope-slap deserved)
• internal memory– bytes -> kbytes of RAM– kbytes of PROM, EPROM, EEPROM, Flash

CsCs• speed
– 2 -> 20 MHz• faster (of course) and slower devices available
– remember, speed power (watts)
• typically, 4 clock cycles per instruction cycle
• external ports– parallel (8 -> 24+ lines)– serial – timer/counter– analog (input; 8 bit typical)
• some devices have multi-channel analog-mux

CsCs• packaging
– 8 pin SOIC -> 400+ ball BGA– and everything in between!
• programming– assembler, C– Basic (?)– Java– Pascal– pBasic, etc.
Lisp? Prolog?

Microcontroller board Microcontroller board examplesexamples
• Motorola 68HC11 based boards:– Handy Board– FingerBoard– BotBoard– MiniBoard

68HC711E9CFN268HC711E9CFN2
• 512 bytes RAM
• 512 bytes EEPROM
• 12 kbytes PROM– containing modified-Buffalo kernel
• 16 bit address, 8 bit data– 16 bit internal
• 8 analog in (8 bit ADC)
• serial I/O, timers, counters
• 8 MHz crystal; 2 MHz cycle

Microcontroller Board Example that Microcontroller Board Example that is presented in detail in Martin’s is presented in detail in Martin’s
textbooktextbook
• Handy Board– Perfect for small
robots
– Easy to develop software

Cs - why might you want one?Cs - why might you want one?
• dedicated application– monitoring, control
• complex sequential function– programmed in C
• low-medium performance• low cost
• CLEO-II.5 silicon power system had over 5 dozen HC11’s– approximating the intellectual capacity, and temperament,
of a 2-year old

Microcontroller Example that is our Microcontroller Example that is our main low-end project platformmain low-end project platform
•Basic Stamp– Basic Programming Language– Full documentation and examples online– Basic Stamp IIe has the most programming space
Another example of a microcontroller

Microcontroller that is even better Microcontroller that is even better and was used in the Skeleton robotand was used in the Skeleton robot
•OOPic– Object oriented
(VisualBasic)– Full documentation
and examples online
Another example

BASIC StampBASIC Stamp
• Many pre-defined functions
• Cost-point: $34 - $99
• Starter kit for $149

Original BASIC Stamp from Original BASIC Stamp from ParallaxParallax
• 256 bytes EEPROM– 80-100 lines of PBASIC
• 16 bytes of RAM– bytes, not kbytes!
• 8 bit parallel port
• serial port
• 4 MHz
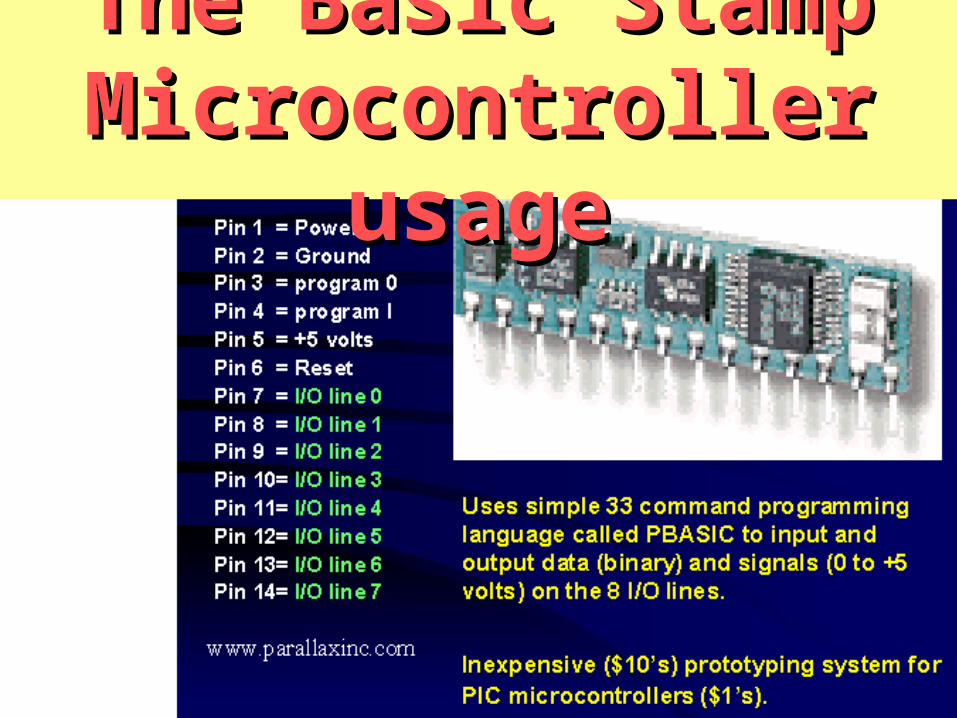
The Basic Stamp The Basic Stamp Microcontroller usageMicrocontroller usage

Basic Stamp II (BSII)Basic Stamp II (BSII)•2048 Bytes of EEPROM(non-volatile)
- Clock speed of 20 MHz.
- Holds 600 lines of code in EEPROM
- executes an average of 4000 instructions/sec
- 32 Bytes of Ram(16 of it for variable storage)
- 16 I/O pins, plus two synchronous serial pins
- Programmable with a PC/Mac through a serial connection with PBasic.

The Board of EducationThe Board of Education • BSII micro-controller
• bread-board
• power supply
• 9 volt connection
• serial cable
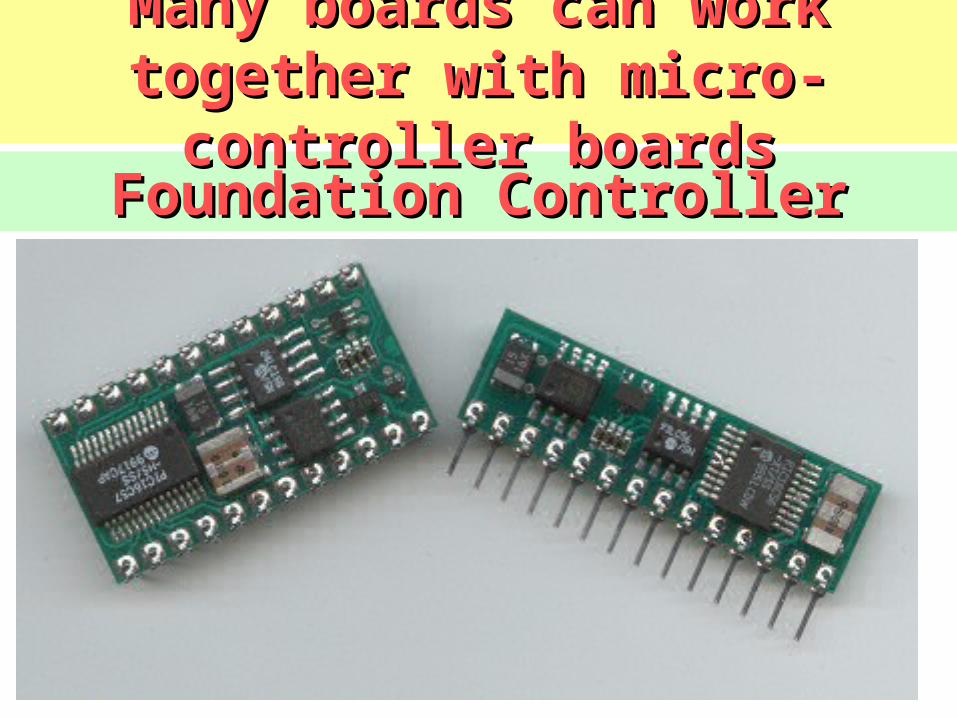
Foundation ControllerFoundation Controller
Many boards can work together with Many boards can work together with micro-controller boardsmicro-controller boards

MotherboardMotherboard

Microchip Microchip PICPIC(Peripheral-Integrated (Peripheral-Integrated
Controller)Controller)• Wide variety of sizes in chip
family• Very low cost: $4-$20 per chip• High speed
• Programmable in C

What is needed to use a PIC?What is needed to use a PIC?
• Software– MP-Lab development
environment– A C-compiler
• PIC-Start Plus programmer
• UV chip eraser for some chips

Pin diagram PIC 12c672Pin diagram PIC 12c672
Pin 1 Positive power (3-5V DC)
Pin 2 Digital input/outputPin 3 Digital i/o, Analog inPin 4 Digital input only
Pin 5 Digital i/o, Analog in,counter-timer
Pin 6 Digital i/o, Analog inPin 7 Digital i/o, Analog inPin 8 Ground

How to use a PIC?How to use a PIC?• Define, step-by-step, the desired behavior
• Choose a chip with appropriate I/O lines
• Build a board
• Write the program
• Test and debug, test and debug

PIC16C58APIC16C58A• 73 bytes RAM
• 2 kbytes UV-erasable EPROM
• 12 I/O pins
• timer/counter
• 18 pin DIP
• 20 MHz crystal; 5 MHz cycle

Digital Signal Digital Signal Processors - DSPsProcessors - DSPs
• Essential difference from the microprocessor:– DSPs are designed for high performance,
repetitive, numerically intensive tasks
• Integer and floating point devices available– integer more common, less expensive
• besides, just multiply your floats by 1000, and you have integers
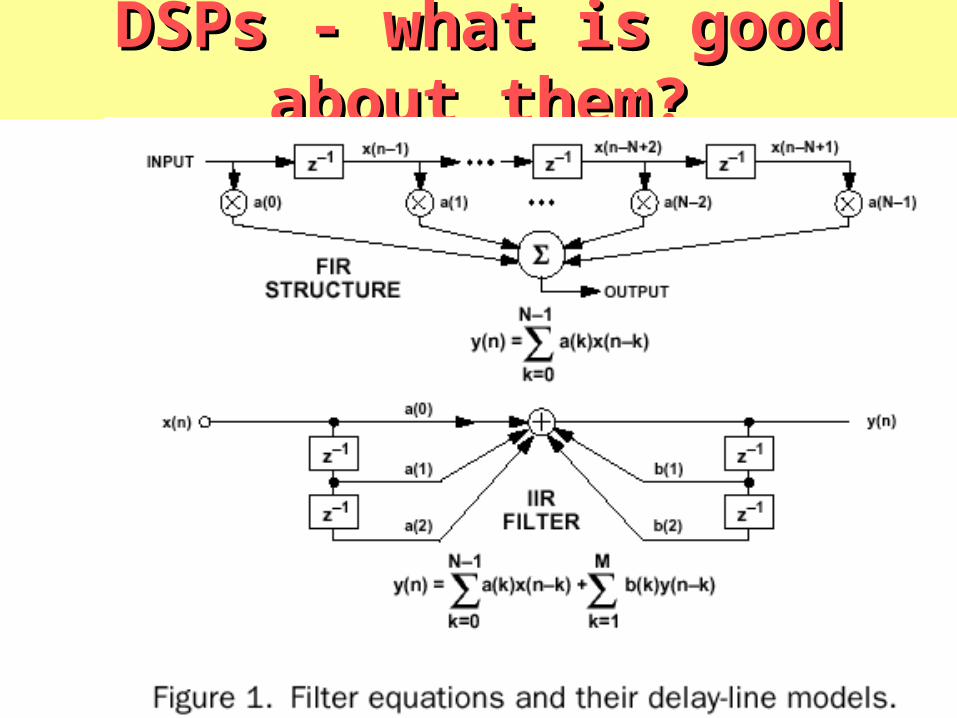
DSPs - what is good about them?DSPs - what is good about them?

DSPs - DSPs - featuresfeatures
• strong numeric architecture(s)– single cycle multiply-accumulate– parallel units (SIMD)
• specialized addressing modes (no overhead)– pre- and post- modification of pointers– circular addressing– bit-reversed addressing (for FFT)
• on-chip memory– multiple memory access
architecture • several accesses per cycle

DSPs - more featuresDSPs - more features• specialized execution control
– tight loops do not require (repeated) instruction fetch– conditional testing and loop-breaks built-in
• does not cost extra instruction to loop
• deep pipelines– TMS320C6200 has an 8-deep pipe
• “wide” operation– VLIW - very long instruction word– many units (numeric, instruction, memory, other)
controlled by single (complicated) instruction

DSPs - architecturesDSPs - architectures• von Neumann - shared program/data memory
• Harvard - separate program memory and data memory
• modified Harvard - get one operand from data memory and another from program memory, in the same cycle
• Super Harvard Architecture– ‘cause SHARC sounds cool!
• TigerSHARC

SHARC !SHARC !

DSPs - DSPs - TMS3TMS320C6220C62
00 00


DSPs - hard to programDSPs - hard to program• keeping the pipe full,
• keeping the many units busy,
• squeezing out performance…
• is really difficult!– Assembly language– “emulators” which measure device performance– no substitute for experience
DSPs - why might you want one?DSPs - why might you want one?
• dedicated (or not) application
• “simple” sequential function– with strong loop structure– best programmed in assembly language
• but C tools are getting better
• high performance– massive throughput!
• medium-high cost– 1200 MIPs for under $50– 2400 MIPs for $250

Programmables - Programmables - OnceOnce
• ROM– read only memory– mask programmed
• PROM– programmable read only memory– fuse/antifuse– one-time programmable

Programmables - A few timesProgrammables - A few times
• EPROM– erasable programmable read only memory– UV light (chases charge off of floating gate)– all or nothing
• EEPROM– electrically erasable programmable read only memory– all or nothing
• “Flash”– EEPROM-like, but page-at-a-time erase

ProgrammablesProgrammables• but why limit yourself to address -> data ?
• programmable array logic - PAL– outputs = (mostly) combinatorial function
of inputs and other outputs• 16L8
– 8 outputs
» 6 of the outputs can be fed back as inputs
– 10 simple inputs
– out = (a&b&!c) + (d&e) + !f + …
» up to 16 terms ANDed
» up to 7 product terms ORed

ProgrammablesProgrammables• programmable logic device - PLD
– AND/OR array– feeding “macrocell” of flipflop/pass-through
• and selectable feedback
– 22V10 (next slide)
• complex PLD - CPLD– lots of PLDs in one chip

Examples of programmable Examples of programmable architecturesarchitectures
(Field) Programmable Gate (Field) Programmable Gate ArraysArrays
• field programmable gate array - FPGA– two common architectures:
• sea-of-PLDs– e.g. Altera MAX 7000, MAX 9000
• sea-of-little look-up tables, feeding flipflops– e.g. Xilinx XC4000, XC5200
• but of course, marketting pressure forceseveryone to sell everything
– Altera FLEX 8K look-up tables…
– Xilinx XC9500 sea of PLDs…
• Actel, Altera, AT&T, Cypress, QuickLogic, Xilinx

MAX (Cypress)MAX (Cypress)

XilinxXilinx
FPGAsFPGAs• sizes
– 103 to 106 “gates”• almost meaningless metric
• low-end = 3.2 x 22V10– ~30 “gates” per AND/OR/macrocell?
• Speeds– 50 MHz to 200+ MHz
• packaging– typically SMT
• QFP, BGA
– 100 to 400+ “pins”

FPGAs - volatile vs FPGAs - volatile vs nonvolatilenonvolatile
• nonvolatile– EEPROM-like
• configuration held in floating-gate cells
– ready on power-up– ~103 reprogram cycles
• so you can make a few mistakes…
– typical for sea-of-PLD devices• smaller number of larger blocks
• more complexity per block
• lower % utilization– as it that means anything

FPGAs - FPGAs - volatilevolatile vs nonvolatile vs nonvolatile
• volatile– SRAM-based configuration †
• must be loaded on every power-up– XC5202 -> 3000 gates, 42kbits of config = 42 ms (serial)– †giant shift register - nothing “random access” about it!
– “unlimited” reprogram cycles• limited by whatever holds the configuration data
– typically a tiny 8 pin serial (EE)PROM
– typical for sea-of-little look-up tables devices• larger number of smaller blocks• less complexity per block• higher % utilization

FPGAs - FPGAs - which one is right for you?which one is right for you?
• If your function fits/works, go with it!
• in-system reprogrammability(volatile or non) is a powerful ally!– Allows “reasonable” mistakes to be corrected
simply by recompiling/reloading
• pick a device larger/faster than you need– don’t expect to use more than 50% of the gates
• you may use them all, but don’t expect to!
• try to use a single clock for everything

FPGAs - why might you want one?FPGAs - why might you want one?
• Anywhere you might use a bunch of chips– or a printed circuit board, or several...
• SoC - “System-on-a-chip”
• Complex parallel function– programmed in HDL
• hardware description language
• Low -> high performance range• Low-medium cost
– smallest is < $1.00
– largest are < $500.00• for a million “gates” :-)

Previous ProjectsPrevious Projects• 1. Review material from ECE 171 and ECE 271 about
logic circuits, microprocessors and PLDs.• 2. Find on Internet data sheets of top companies that
produce processors or programmable devices that may be used in your robotic project this year.
• 3. Learn about programmable devices and boards that we have in the lab. Dr. Greenwood has the whole FPGA lab with programming tools and interfaces as well.
• 4. For the following tasks: robot theatre, robot soccer, robot sumo, biped robot walker, analyze the best choice of microcontrollers or other devices to implement control.

SourcesSources•Curtis Bahn, RPI• J.E. Wampler•Michael Rodemer, University of Michigan, School of Art and Design•Physics and Media Group, MIT •Josh R. Fairley•Dr. Raymond S. Winton •Mike Haney, University of Illinois •Steve Benkovic, Cal State University , Northridgehttp://homepage.mac.com/Sbenkovic [email protected]•Franklin Alioto, Christine Beltran, Eric Cina, Vince Francisco, Margo Gaitan, Matthew O’Connor, Mike Rasay.•Kenneth Chin and Prang Chim• Dr. Jim Ostrowski, Bob Miller, Wally Szczesniak, Terry Kientz, Brett Balogh , Siddharth Deliwala, John Bowen, Darnel Degand, Kapil Kedia, Adrian Fox, Christopher Li