分布推定アルゴリズムによる memetic algorithmsを用いた制約充 …
TRANSCRIPT

405
✞✝
�✆論 文 Technical Papers ��
分布推定アルゴリズムによるMemetic Algorithmsを用いた制約充足問題解決Solving Constraint Satisfaction Problemsby Memetic Algorithms Using Estimation of Distribution Algorithms
半田 久志Hisashi Handa
岡山大学工学部Faculty of Engineering, Okayama University
[email protected], http://www.sdc.it.okayama-u.ac.jp/~handa/
keywords: estimation of distribution algorithms, memetic algorithms, constraint satisfaction problems, evolu-tionary computation
Summary
Estimation of Distribution Algorithms, which employ probabilistic models to generate the next pop-ulation, are new promising methods in the field of genetic and evolutionary algorithms. In the case ofconventional Genetic and Evolutionary Algorithms are applied to Constraint Satisfaction Problems, it iswell-known that the incorporation of the domain knowledge in the Constraint Satisfaction Problems is quiteeffective. In this paper, we constitute a memetic algorithm as a combination of the Estimation of Distribu-tion Algorithm and a repair method. Experimental results on general Constraint Satisfaction Problems tellus the effectiveness of the proposed method.
1. ま え が き
制約充足問題 (Constraint Satisfaction Problems, CSP)は変数と変数間に張られた制約からなる問題のクラスであり,さまざまな分野における工学的問題の解決に用いられる [Tsang 93, Paredis 93]. 制約という考え方に依拠した問題解決はつぎの手順で行われる:(1)まず対象問題に内在する要素を洗い出し,それらの満たすべき関係
を制約として規定し,制約充足問題を生成する.(2)そして,制約ソルバと呼ばれるアルゴリズムを用いて,生成された制約充足問題に内在するすべての制約関係を満足するような解を見出す.制約充足問題として記述できる対象問題はこの制約ソルバを用いて解決することができるので,この制約ソルバは非常に汎用的なアルゴリズムであるといえる.近年,この制約ソルバとして進化計算
を用いた研究が盛んになされている [Paredis 93, Eiben94, Craenen 01].これらの研究から制約充足問題に内在する領域知識の積極的な利用が効果的であるという知見が得られている:たとえば,Min-Conflict Hill Climb-ing (MCHC)[Minton 94]という概念に基づいた局所探索法 (制約充足問題ではリペア法とも呼ばれる)を併用したMemetic Algorithms∗1が大変効果的であるというこ
∗1 Memetic Algorithmsとは進化計算と局所探索法を組み合わせたアルゴリズムである.Memetic Algorithmsでは各個体に遺伝演算として局所探索法を施す.
とや [Eiben 94, Craenen 01],またRiffらの研究に見られるように,制約関係と変数をそれぞれエッジとノードとみなした制約ネットワークにおけるトポロジ情報の積極的な活用が挙げられる [Riff 96, Riff 97].
分布推定アルゴリズム (Estimation of DistributionAlgorithms)は新しい進化計算のクラスであり,その探索性能から脚光を浴びているアルゴリズムである [Muhlenbein96, Larranaga 02].分布推定アルゴリズムでは次世代の集団を形成するために通常の交叉や突然変異といった遺伝演算を用いない.その代わり,分布推定アルゴリズムでは,現世代の集団の中で高い適応度をもつ個体群から推定された確率モデルを用いて,次世代の集団を形成する.
本論文では,分布推定アルゴリズムに局所探索法を併用した Memetic Algorithmを提案し,一般制約充足問題に対して適用を行い有用性を検討する.とくに,本論
文では,分布推定アルゴリズムは制約ソルバとして従来型の進化計算より優れているか,さらに,従来型進化計算ではMemetic Algorithmsを構成することで飛躍的な性能改善が見られたが,分布推定アルゴリズムの場合でもMemetic Algorithmsを構成することにより同様な効果があるのかどうかを明らかにする.
Zhangらはリスタート時に分布推定アルゴリズムの考え方を導入した EDA/GLSを提案している [Zhang 03].局所探索法が局所解に陥ったときに,よりよい局所解を
探索するために解を再初期化しリスタートさせることが

406 人工知能学会論文誌 19 巻 5 号 F(2004 年)
あるが,Zhangらは条件付確率テーブルを構成し,そのテーブルを参照しつつ解の再初期化を行う方法を提案している.一方,本研究では,確率モデルによって生成された個体群に遺伝演算として局所探索法,具体的には,Eibenらによって提案された H-GAに用いられている無性ヒューリスティック演算 (asexual heuristic operator)を施している [Eiben 94].この無性ヒューリスティック演算は局所解に陥るまで局所探索を行わず,簡単な解の
改善を試みるものである.すなわち本論文における提案手法は,Zhangらの手法とは異なり,分布推定アルゴリズムが有する高い探索能力を重用していくアプローチである.
本論文の構成について述べる:次節では,制約充足問題の概要について述べる.そして,3章で 3種類の分布推定アルゴリズムを紹介する.さらに,4章で提案手法,すなわち,局所探索法を併用した分布推定アルゴリズムを導入する.そして,5章にて,一般制約充足に適用し従来型アルゴリズムと比較を行う.最後に本論文をまとめる.
2. 制約充足問題
2・1 問題の定式化
制約充足問題は変数と変数間の制約で構成される問題のクラスである [Tsang 93].とくに,2変数間のみに制約関係が存在する問題のクラスはバイナリー制約充足問題と呼ばれている.本論文ではこのクラスを対象とする.グ
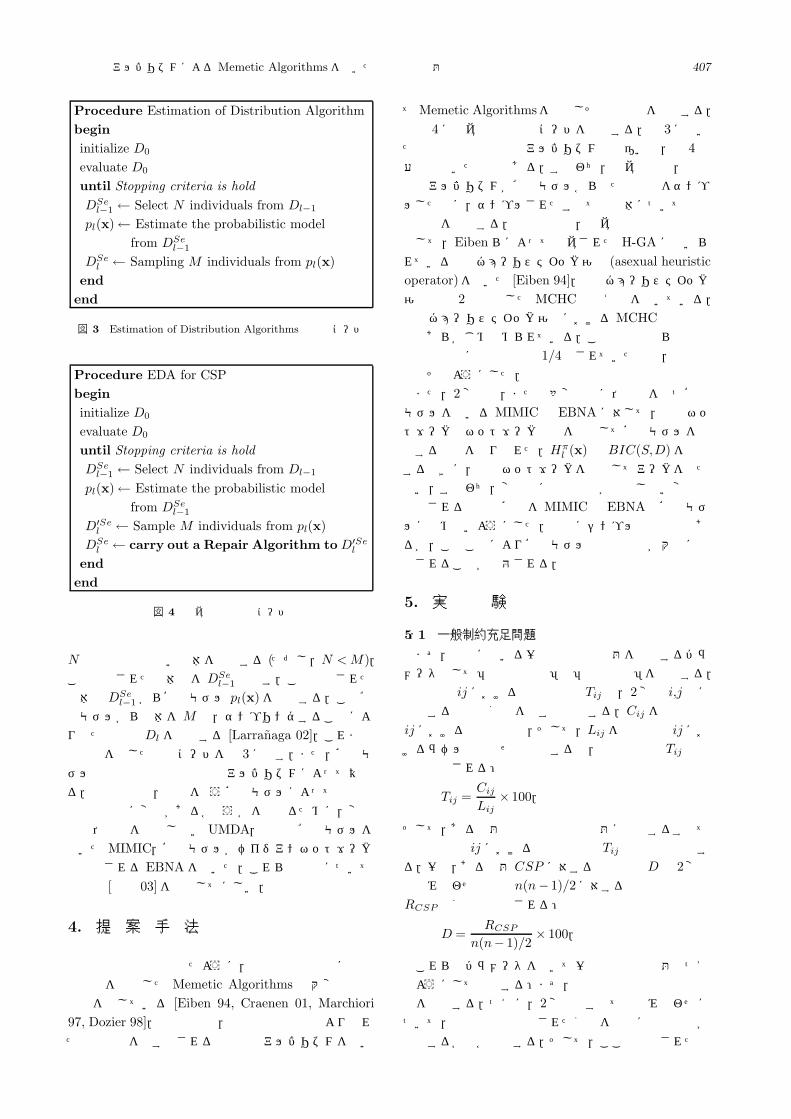
ラフ彩色問題は,バイナリー制約充足問題の一例であり,ベンチマークとしてよく用いられている (図 1).この図に描かれているように,制約充足問題は 4つ組 (U,L,T,R)で定義され,集合 U,L,T,R は,それぞれ,変数の集合,変数に割り当てることが可能なラベルの集合,制約関係の集合,各制約関係に内在する制約の集合を表している.図中にある 3色彩色問題の場合,集合 U はグラフ
のノードで表され,L は彩色を行なう色,すなわち,赤,緑,青を表している.制約関係 T はエッジで表されており,R は異なる色の組み合わせについて制約が課せられている.
「制約充足問題を解く」ということは,すべての制約関係について制約違反が存在しないような,変数へのラベルの割り当てを求めるということである.また,このときの割り当てられた解のことを充足解と呼ぶ.
2・2 Min-Conflict Hill Climbing
MCHCは局所探索法 (リペア法)に使われる考え方であり,MCHCに基づいた局所探索法はMemetic Algorithmだけでなく,制約充足問題解決のための近似アルゴリズムに広く使われているものである.MCHCの手順を図 2に示す:MCHCではある解から探索を始め,その解の評価を行う.この際,各変数ごとに制約違反数を記してお
・Set of Units : U = {x, y, z, w}・Set of Labels : L = {r, g, b}・Unit Constraint Relations : T = {t1, t2, t3, t4, t5} t1=(x,y), t2=(y,z), t3=(z,w), t4=(x,w), t5=(y,w)・Unit-Label Constraint Relations : R = {R1, R2, R3, R4, R5} R1 = {(r,g), (r,b), (g,r), (g,b), (b,r), (b,g)} R2 = {(r,g), (r,b), (g,r), (g,b), (b,r), (b,g)} R3 = {(r,g), (r,b), (g,r), (g,b), (b,r), (b,g)} R4 = {(r,g), (r,b), (g,r), (g,b), (b,r), (b,g)} R5 = {(r,g), (r,b), (g,r), (g,b), (b,r), (b,g)}
y z
wxx
y
w
z
{r, g, b} {r, g, b}
{r, g, b} {r, g, b}
(b) Graph representation of the CSP (a)(a) Map representation
図 1 制約充足問題の例: グラフ彩色問題
Procedure Min-Conflict Hill Climbingbegine(i)← evaluate each var. i in a solutionuntil Stopping criteria is holdi∗← Select a variable with the worst evaluationRe-evaluate e(i∗) for all labels in the var. i∗
Select a label in the var. i∗ with the best eval.Modify the solution to the selected labelRe-evaluate the solution w.r.t. the modification
endend
図 2 Min-Conflict Hill Climbing の擬似コード
く.つぎに,最大制約違反数を有する変数を一つ選択する.選ばれた変数についてとりうる全てのラベル (値)を適用し,適用後の解について制約違反数を計算する.現在着目している変数について制約違反数が最少となるラベルを新たな解として採用する.最少制約違反となるラベルが複数存在するときはそれらの中でランダムに選択する.新たに構成された解の再評価を行い,終了条件を満たすまで探索を繰り返す.
3. 分布推定アルゴリズム
分布推定アルゴリズムは通常の進化計算で用いられる交叉や突然変異の代わりに,確率モデルを用いて次世代
集団を形成する進化計算のクラスである.この確率モデルは (条件付)確率で表現され,現世代集団中から選ばれた高い適応度を持つ個体群の遺伝情報から推定される.分布推定アルゴリズムは次の手順で計算を行う:個体数M の初期集団D0をランダムに生成し,適応度評価を行う.そして終了条件を満たすまで以下の繰り返し処理を
行う.l世代目 (l ≥ 1)において前世代の集団Dl−1 から
分布推定アルゴリズムによるMemetic Algorithmsを用いた制約充足問題解決 407
Procedure Estimation of Distribution Algorithmbegininitialize D0
evaluate D0
until Stopping criteria is holdDSe
l−1 ← Select N individuals from Dl−1
pl(x)← Estimate the probabilistic modelfrom DSe
l−1
DSel ← Sampling M individuals from pl(x)
endend
図 3 Estimation of Distribution Algorithms の擬似コード
Procedure EDA for CSPbegininitialize D0
evaluate D0
until Stopping criteria is holdDSe
l−1 ← Select N individuals from Dl−1
pl(x)← Estimate the probabilistic modelfrom DSe
l−1
D′Sel ← Sample M individuals from pl(x)
DSel ← carry out a Repair Algorithm to D′Se
l
endend
図 4 提案手法の擬似コード
N 個の適応度の高い個体を選択する (ただし,N < M).この選択された個体群を DSe
l−1 で表す.この選択された個体群 DSe
l−1 から確率モデル pl(x)を推定する.この確率モデルから個体をM 回,サンプリングすることにより新たな集団 Dl を形成する [Larranaga 02].これまでの手順を記した擬似コードを図 3に示す.また,確率モデルの表現方法や推定方法はアルゴリズムによって異なる.本論文では,推定を行う確率モデルによって局所探索法の効果に変化があるかどうかを調べるために,変数間の依存性を考慮しない UMDA,鎖状の確率モデルを用いたMIMIC,確率モデルがベイジアンネットワークで表現される EBNA を用いた.これらの詳細については文献 [倉橋 03]を参照してほしい.
4. 提 案 手 法
本論文の冒頭で述べたように,従来型進化計算に局所探索法を併用した Memetic Algorithms は大変良好な性能を示している [Eiben 94, Craenen 01, Marchiori97, Dozier 98].本論文では,従来型の進化計算より優れた探索性能を示すとされる分布推定アルゴリズムを用い
てMemetic Algorithmsを構成しその有用性を検討する.図 4に提案手法の擬似コードを記述する.図 3に書いたもともとの分布推定アルゴリズムとの違いは,図 4で太字で書いた部分である.すなわち,提案手法は,分布推定アルゴリズムが確率モデルから新たな集団をサンプルした後に,サンプルされたすべての個体について局所探索法を適用する.本論文では,提案手法の局所探索法として,Eiben らによって提案された H-GA に用いられている無性ヒューリスティック演算 (asexual heuristicoperator)を用いた [Eiben 94].無性ヒューリスティック演算は図 2 で紹介した MCHC の考え方を用いている.無性ヒューリスティック演算におけるMCHC の適用回数はあらかじめ決められている.この回数は彼らの論文では経験的に文字列長の 1/4とされていたので,本論文でもそのようにした.また,2変量間,または多変量間に依存性をもつ確率モデルを用いるMIMIC と EBNA に対して,制約ネットワークのネットワーク構造を考慮して確率モデルを生成する方法を取り入れた.Hπ
l (x) や BIC(S,D)を計算するときに,制約ネットワークを参照してアークを持たない,すなわち,変数間に制約関係が存在しない変数で
構成される条件付確率を MIMICと EBNAの確率モデルに含めないようにした.非常にシンプルな方法ではあるが,このことにより確率モデルの推定時間が大幅に減少されることが期待される.
5. 実 験
5・1 一般制約充足問題
まず,実験に用いる一般制約充足問題を規定するパラメータとして「制約拘束度」と「制約密度」を導入する.制約関係 ij における制約拘束度 Tij は,2変数 i,j 間に存在する制約の割合を表すものとする.Cij を制約関係
ij における制約の個数,そして,Lij を制約関係 ij におけるラベルの組合せ総数とすると,制約拘束度 Tij は次式で表現される:
Tij =Cij
Lij× 100.
そして,ある問題の制約拘束度は問題に存在するすべての制約関係 ij における制約拘束度 Tij の平均で定義する.一方,ある問題CSP に対する制約密度 Dは 2変数の組み合わせの総数 n(n− 1)/2に対する制約関係の総数RCSP の割合で定義される:
D =RCSP
n(n− 1)/2 × 100.
これらのパラメータを用いて一般制約充足問題はつぎのようにして生成する:まず,上の制約拘束度と制約密度を指定する.つぎに,2変数のすべての組み合わせについて,制約密度で指定された割合をもとに制約関係が
存在するか否か決定する.そして,ここで生成された制

408 人工知能学会論文誌 19 巻 5 号 F(2004 年)
約関係すべてについて,制約拘束度で指定された割合に
応じて,制約関係に内在する制約を決定する.
このようにして生成される一般制約充足問題は,多様
な制約充足例を内包すると考えられる:たとえば,ベンチマーク問題としてしばしば用いられるグラフ彩色問題は,制約拘束度が 66となり制約密度は全グラフに対するグラフに内在するアークの個数の割合 (%)で表される.また,N -クィーン問題では問題サイズは N で,制約拘束度はおよそ 3/N × 100で,制約密度は 100となる.
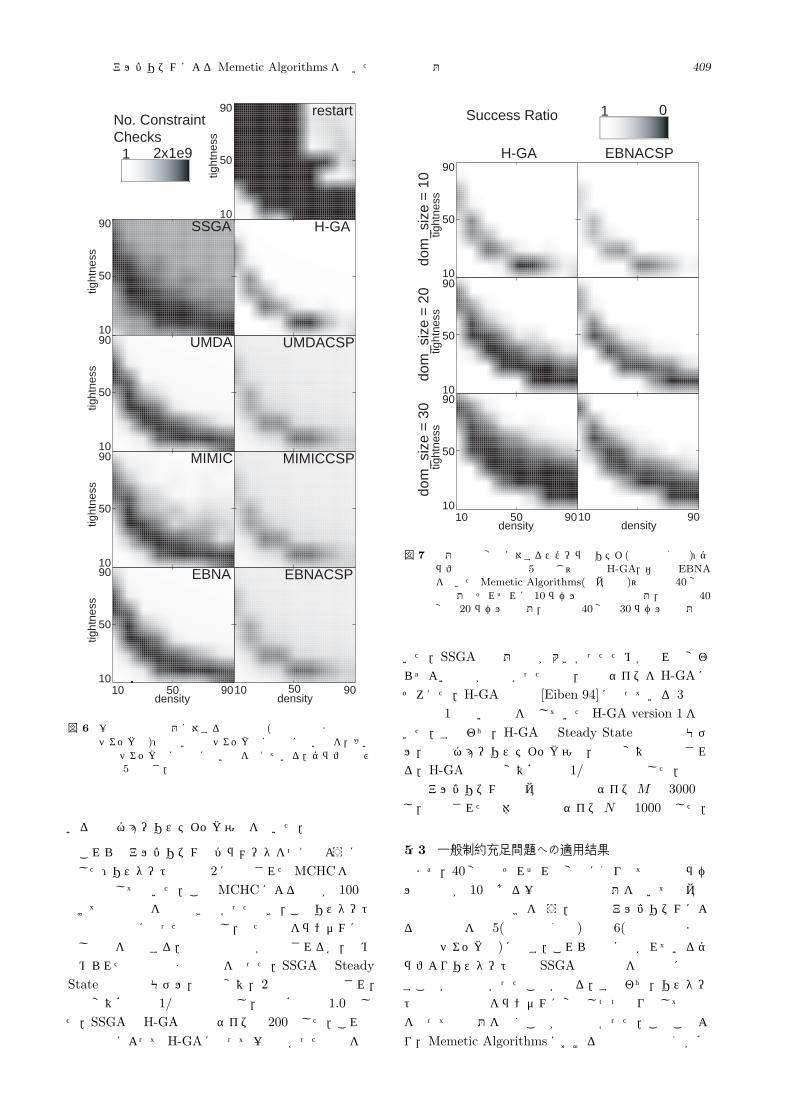
本論文ではさまざまな制約密度,制約拘束度をもつ一般制約充足問題を用いて実験を行う:実験では 40変数でラベルの数が 10,20,30である一般制約充足問題に適用を行った.制約密度と制約拘束度のそれぞれについて,10から 90まで 10刻みに変更し,さらにそれぞれの制約密度と制約拘束度の組み合わせに対して 25種類の問題を生成した.グラフは 2種類あり,一つは,成功試行割合,すなわち,25試行中でどれだけの試行で充足解を発見できたかどうかを示す割合である.もう一つは,成
功試行時における充足解発見までの平均制約チェック数である.仮に制約試行割合が 0であった場合,この平均制約チェック数は 1試行における制約チェック数の上限である 20億回とした.本論文のすべてのグラフの横軸と縦軸は,それぞれ,制約密度 (density)と制約拘束度(tightness)を示している.グラフでは良い結果 (高い成功割合,もしくは,少ない平均制約チェック数による充足解発見)を示したときは明るい色を指定し,悪い結果(低い成功割合,もしくは多い平均制約チェック数)を示すときは暗い色で描くようにした.
程度の違いはあるが,ほとんどグラフにおいて暗い領域が制約密度・拘束度の特定の組み合わせに存在していることが判る.このような領域は制約充足問題の研究分野では相転移を起こしている領域と呼ばれており,そこでは,どのようなアルゴリズムを用いても,問題を解く,
すなわち,充足解を見出すのが困難であることが知られている.
5・2 適応度関数・符号化・パラメータ設定
制約充足問題を解くための適応度関数としてつぎの関数を用いた:
1−NCV /NMC ,
ここで,NCV と NMC は,それぞれ,適応度評価を行う個体が違反した制約の個数と,n変数バイナリー制約充足問題における最大制約関係個数 (n(n− 1)/2)を表している.
符号化法は制約充足問題の変数のそれぞれを遺伝子に割り当てる符号化を用いた.すなわち,それぞれの変数に割り当て可能なラベルは関連付けられた遺伝子座の対
立遺伝子に対応する.
EBNACSPEBNA
MIMIC MIMICCSP
UMDACSPUMDA
H-GASSGA
restart
Success Ratio1 0
10 50 90
90
50
10tig
htne
ss
density
90
50
10
tight
ness
90
50
10
tight
ness
90
50
10
tight
ness
90
50
10
tight
ness
10 90density
50
図 5 一般制約充足問題に対する実験結果 (成功試行割合):高い成功割合には白に近い色を,低い成功割合には黒に近い色を与えている.左側は局所探索法を用いないアルゴリズムで右側は用いるもの;最上段は進化計算を用いない近似アルゴリズム (リスタート法),2段目は SSGA に基づいた進化計算,3 段目は UMDA,4段目は MIMIC,最下段は EBNA.
本論文で用いたアルゴリズムはつぎのとおりである:従来型進化計算として SSGA[Syswerda 90],制約充足問題解決のための Memetic Algorothmsとして EibenらのH-GA[Eiben 94],進化的なアプローチではない制約充足問題を解く近似アルゴリズムとしてリスタート法,そして,前節で紹介した分布推定アルゴリズムであるUMDA,MIMIC,EBNAと比較を行った.提案手法は上の 3つの分布推定アルゴリズムに局所探索法を付加したMemeticAlgorithmとし,それぞれ,UMDACSP,MIMICCSP,EBNACSPと表記した.4章で述べたように,本論文では,局所探索法として Eiben らの H-GAに用いられて
分布推定アルゴリズムによるMemetic Algorithmsを用いた制約充足問題解決 409
No. ConstraintChecks
1 2x1e9
EBNACSPEBNA
MIMIC MIMICCSP
UMDACSPUMDA
H-GASSGA
restart
10 50 90
90
50
10
tight
ness
density
90
50
10tig
htne
ss90
50
10
tight
ness
90
50
10
tight
ness
90
50
10
tight
ness
10 90density
50
図 6 一般制約充足問題に対する実験結果 (充足解発見までの制約チェック数):少ない制約チェック数には白に近い色を,多い制約チェック数には黒に近い色を与えている.グラフの並びは図 5 と同じ.
いる無性ヒューリスティック演算を用いた.
これらのアルゴリズムのパラメータをつぎのように設定した:リスタート法は図 2に記述されたMCHCを局所探索法として用いた.このMCHCによる探索が 100回続けて評価関数を改善できなかったとき,このリスタート
法では局所解に陥ったと判断し,新たな解をランダムに生成し探索を再開する.探索は充足解が発見されるか,予め決められた探索回数まで探索を行った.SSGAは SteadyState世代交代モデル,突然変異,2点交叉で構成され,突然変異確率は 1/文字列長 とし,交叉確率は 1.0 とした.SSGAとH-GAの集団サイズは 200とした.これは予備実験によって H-GAにとって一番良かったものを用
Success Ratio 1 0
EBNACSPH-GA
10 50 90
90
50
10
tight
ness
density
90
50
10
tight
ness
90
50
10
tight
ness
10 90density
dom
_siz
e =
10
dom
_siz
e =
20
dom
_siz
e =
30
図 7 問題規模の変化に対するスケーラビリティ(成功試行割合):グラフの描画方法は図 5と同じ;左側はH-GA,右側は EBNAを用いたMemetic Algorithms(提案手法);上段は 40 変数の問題でそれぞれに 10 ラベル指定可能な問題,中段は 40変数 20 ラベルの問題,下段は 40変数 30 ラベルの問題
いた.SSGAは問題規模が大きかったためかどれも変わらずよい結果が出なかったので,集団サイズをH-GAにそろえた.H-GAは文献 [Eiben 94]に載っている 3種類の中で 1番良い性能を示していた H-GA version 1を用いた.すなわち,H-GAは Steady State世代交代モデル,無性ヒューリスティック演算,突然変異で構成される.H-GAの突然変異確率も 1/文字列長 とした.分布推定アルゴリズムと提案手法の集団サイズM は 3000とし,選択された個体群の集団サイズ N は 1000とした.
5・3 一般制約充足問題への適用結果
まず,40変数でそれぞれの変数に割り当て可能なラベルの個数が 10である一般制約充足問題を用いて提案手法と従来手法との比較を行う.前節のアルゴリズムによ
る計算結果を図 5(成功試行割合) と図 6(充足解発見までの制約チェック数)に示す.これらの図に描かれているグラフよりリスタート法と SSGAは充足解を効果的に見出すことが出来なかったことが判る.すなわち,リスタート法では初期点をランダムに変更しつつ繰り返して探索を行っても問題を解くことが出来なかった.このことよ
り,Memetic Algorithmsにおける進化計算の役割が確
410 人工知能学会論文誌 19 巻 5 号 F(2004 年)
No. ConstraintChecks
1 2x1e9
EBNACSPH-GA
10 50 90
90
50
10
tight
ness
density
90
50
10
tight
ness
90
50
10
tight
ness
10 90density
dom
_siz
e =
10
dom
_siz
e =
20
dom
_siz
e =
30
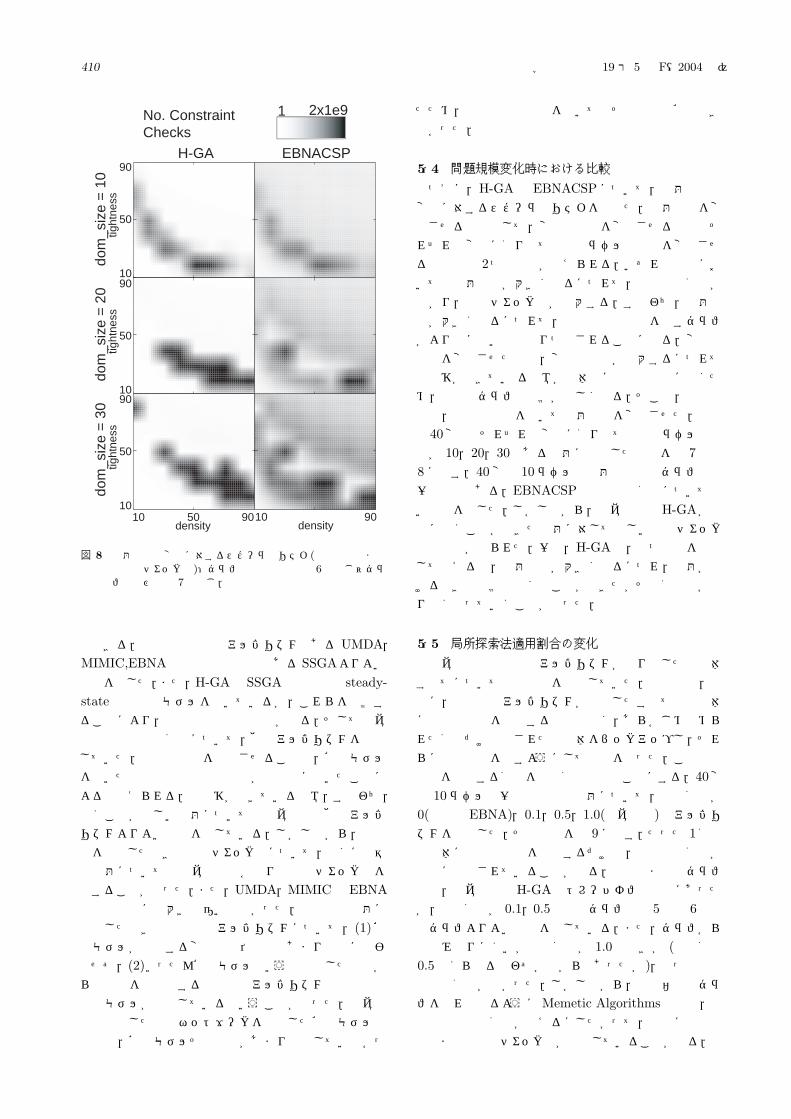
図 8 問題規模の変化に対するスケーラビリティ(充足解発見までの制約チェック数):グラフの描画方法は図 6 と同じ;グラフの並びは図 7と同じ.
認できる.従来型分布推定アルゴリズムである UMDA,MIMIC,EBNAは従来型進化計算であるSSGAよりよい性能を示した.また,H-GAとSSGAは両方とも steady-state 世代交代モデルを用いているが,これらを比較することにより,局所探索法の有用性が判る.そして提案手法は成功試行割合について,他のアルゴリズムを凌駕していた.局所探索法を融合させることと,確率モデルを用いた効果的な次世代の形成が効果的に働いたことに
よると考えられる.相転移が起きている領域,すなわち,解くことが難しい問題については提案手法は他のアルゴリズムよりよい性能を示している.しかしながら,充足解を発見したときの制約チェック数について,とくに平易な問題についても提案手法はかなりの制約チェック数を要することが判った.また,UMDA,MIMICや EBNAの実験結果には大きな違いはなかった.制約充足問題に
適用したときの分布推定アルゴリズムについて,(1)確率モデルが仮定する変数間の依存性はあまり結果には影響せず,(2)いったん確率モデルという抽象化した情報から解候補を具現化する分布推定アルゴリズム特有の世代交代モデルが機能しているということが判った.提案手法で導入した制約ネットワークを参照した確率モデルの
生成は,確率モデルそのものがあまり機能していなかっ
たため,計算時間の減少を除いてはその効果は確認でき
なかった.
5・4 問題規模変化時における比較
つぎに,H-GAと EBNACSPについて,問題規模の変化に対するスケーラビリティを調べた.問題規模を変化させる方法として,変数の個数を変化させる方法とそれぞれの変数に割り当て可能なラベルの個数を変化させる方法との 2つの方法が考えられる.いずれの場合においても問題規模が大きくなるにつれて,成功試行割合が下がり,制約チェック数が増大する.すなわち,問題規模が大きくなるにつれて,前節の実験結果を示すグラフがより黒に近い色で塗りつぶされることになる.変数の個数を変化させた場合,変数の個数が増大するにつれて相転移が起きてい る領域が全体的に左下の方向に動くため,結果のグラフの比較が難しくなる.そこで,本論文
では,後者の方法を用いて問題規模を変化させた.40変数でそれぞれの変数に割り当て可能なラベルの個
数が 10,20,30である問題に適用した結果を図 7と図8に示す.40変数 10ラベルの問題は前出のグラフと同一のものである.EBNACSPは成功試行割合について良い結果を示した.しかしながら,提案手法はH-GAが簡単に解くことができた問題に対して著しい制約チェック数の増加が見られた.一方,H-GAは,二つの図を総合して考えると,問題規模が大きくなるにつれ,問題が解けるときは比較的速く解ことができたがその割合はかなり低くなっていくことが判った.
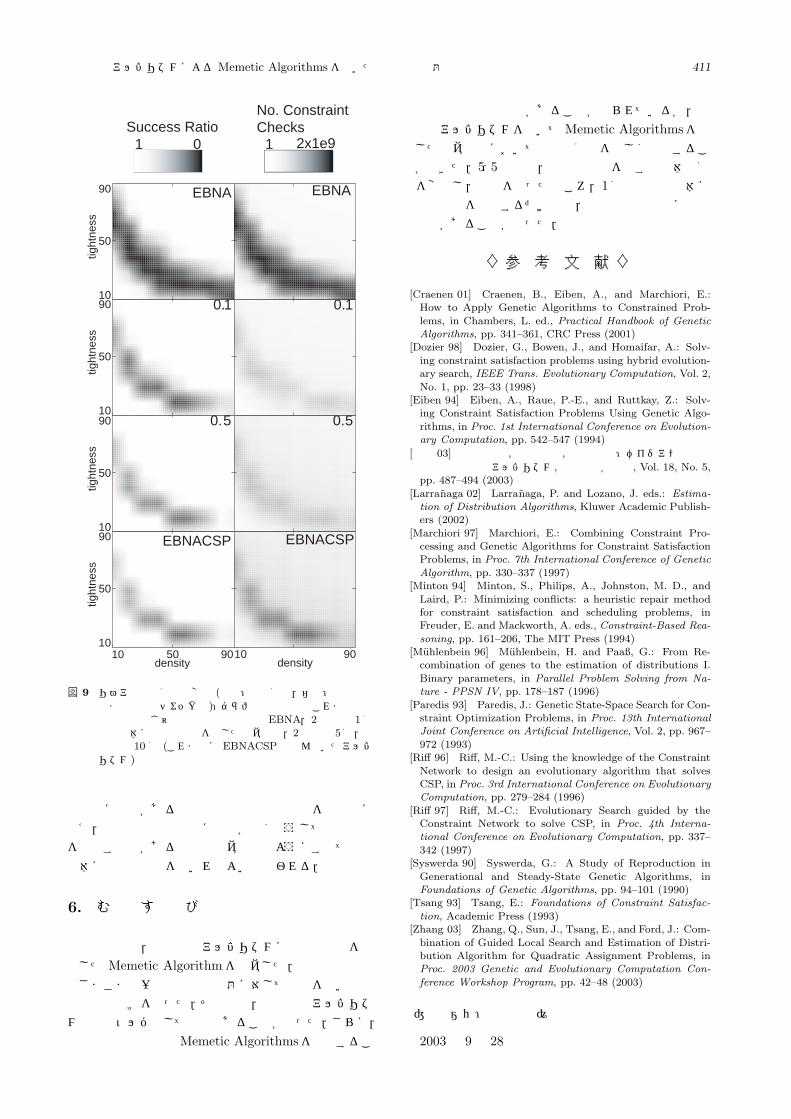
5・5 局所探索法適用割合の変化
提案手法は分布推定アルゴリズムが作り出した子個体
すべてについて局所探索を適用していた.本節では,最後に,分布推定アルゴリズムが生成したすべての子個体に局所探索法を適用するのではなく,あらかじめ決められた割合だけ生成された子個体をピックアップし,それらに局所探索を施すようにして実験を行った.この局所探索を適用する割合を適用割合と呼ぶことにする.40変数 10ラベルの一般制約充足問題について,適用割合が0(従来型 EBNA),0.1,0.5,1.0(提案手法)のアルゴリズムを適用した.その結果を図 9に示す.たった 1割の子個体に局所探索法を適用するだけで,成功試行割合が劇的に改善されていることが判る.前小節までのグラフでは,提案手法とH-GAはトレードオフの関係にあったが,適用割合が 0.1,0.5の時のグラフは図 5と図 6のどのグラフよりよい性能を示している.また,グラフからは読み取りにくいが適用割合が 1.0のときが (適用割合0.5とくらべるとわずかながらであったが),もっとも成功試行割合が高かった.しかしながら,図中右側のグラフを見れば判るようにMemetic Algorithmsの場合,局所探索法適用割合が増えるにしたがって,単調に充足解
発見までの制約チェック数が増加していることが判る.探
分布推定アルゴリズムによるMemetic Algorithmsを用いた制約充足問題解決 411
10 50 90
90
50
10
tight
ness
density
90
50
10
tight
ness
90
50
10
tight
ness
10 90density
0.1
0.5
Success Ratio1 0
EBNACSP
EBNA90
50
10
tight
ness
No. ConstraintChecks
1 2x1e9
EBNACSP
0.5
0.1
EBNA
図 9 リペア法導入割合の変化 (左側:成功割合,右側:充足解発見までの制約チェック数):グラフの描画方法はこれまでの実験結果と同じ;最上段はもともとの EBNA,2 段目は 1 割の子個体に局所探索法を施した提案手法,2段目は 5割,最下段は 10 割 (これまでに EBNACSP と呼んでいたアルゴリズム)
索時間に制限がある場合は局所探索法の使用を最小限に抑え,時間や計算機資源に制限がなくどうしても充足解を見出す必要がある場合は提案手法のようにすべての子
個体に局所探索法を用いればよいと思われる.
6. む す び
本論文では,分布推定アルゴリズムに局所探索法を併用した Memetic Algorithmを提案した.計算機実験ではさまざまな一般制約充足問題に対して適用を行い従来手法との比較を行った.その結果,分布推定アルゴリズムは制約ソルバとして有用であることが判った.さらに,
従来型進化計算ではMemetic Algorithmsを構成するこ
とで飛躍的な性能改善があることが知られているが,分
布推定アルゴリズムを用いてMemetic Algorithmsを構成した提案手法においても成功割合を著しく改善することができた.5・5節では,局所探索法を施す子個体の割合を変更し,実験を行ったところ,1割程度の子個体に局所探索法を適用するだけでも,探索性能の改善に劇的な効果があることが判った.
♦ 参 考 文 献 ♦[Craenen 01] Craenen, B., Eiben, A., and Marchiori, E.:How to Apply Genetic Algorithms to Constrained Prob-
lems, in Chambers, L. ed., Practical Handbook of GeneticAlgorithms, pp. 341–361, CRC Press (2001)
[Dozier 98] Dozier, G., Bowen, J., and Homaifar, A.: Solv-
ing constraint satisfaction problems using hybrid evolution-ary search, IEEE Trans. Evolutionary Computation, Vol. 2,
No. 1, pp. 23–33 (1998)[Eiben 94] Eiben, A., Raue, P.-E., and Ruttkay, Z.: Solv-ing Constraint Satisfaction Problems Using Genetic Algo-
rithms, in Proc. 1st International Conference on Evolution-ary Computation, pp. 542–547 (1994)
[倉橋 03] 倉橋 節也, 勝又 勇治, 寺野 隆雄:ベイジアン最適化手法と分布推定アルゴリズム, 人工知能学会誌, Vol. 18, No. 5,pp. 487–494 (2003)
[Larranaga 02] Larranaga, P. and Lozano, J. eds.: Estima-tion of Distribution Algorithms, Kluwer Academic Publish-ers (2002)
[Marchiori 97] Marchiori, E.: Combining Constraint Pro-cessing and Genetic Algorithms for Constraint SatisfactionProblems, in Proc. 7th International Conference of Genetic
Algorithm, pp. 330–337 (1997)[Minton 94] Minton, S., Philips, A., Johnston, M. D., and
Laird, P.: Minimizing conflicts: a heuristic repair methodfor constraint satisfaction and scheduling problems, inFreuder, E. and Mackworth, A. eds., Constraint-Based Rea-
soning, pp. 161–206, The MIT Press (1994)[Muhlenbein 96] Muhlenbein, H. and Paaß, G.: From Re-combination of genes to the estimation of distributions I.
Binary parameters, in Parallel Problem Solving from Na-ture - PPSN IV, pp. 178–187 (1996)
[Paredis 93] Paredis, J.: Genetic State-Space Search for Con-straint Optimization Problems, in Proc. 13th InternationalJoint Conference on Artificial Intelligence, Vol. 2, pp. 967–
972 (1993)[Riff 96] Riff, M.-C.: Using the knowledge of the Constraint
Network to design an evolutionary algorithm that solvesCSP, in Proc. 3rd International Conference on EvolutionaryComputation, pp. 279–284 (1996)
[Riff 97] Riff, M.-C.: Evolutionary Search guided by theConstraint Network to solve CSP, in Proc. 4th Interna-tional Conference on Evolutionary Computation, pp. 337–
342 (1997)[Syswerda 90] Syswerda, G.: A Study of Reproduction in
Generational and Steady-State Genetic Algorithms, inFoundations of Genetic Algorithms, pp. 94–101 (1990)
[Tsang 93] Tsang, E.: Foundations of Constraint Satisfac-
tion, Academic Press (1993)[Zhang 03] Zhang, Q., Sun, J., Tsang, E., and Ford, J.: Com-
bination of Guided Local Search and Estimation of Distri-bution Algorithm for Quadratic Assignment Problems, inProc. 2003 Genetic and Evolutionary Computation Con-
ference Workshop Program, pp. 42–48 (2003)
〔担当委員:津本周作〕
2003年 9月 28日 受理
412 人工知能学会論文誌 19 巻 5 号 F(2004 年)
著 者 紹 介
半田 久志(正会員)
1996 年大阪教育大学大学院修士課程教育学研究科総合基礎科学専攻修了,同年京都大学大学院博士後期課程精密工学専攻入学,1998 年同大学院退学,同年より岡山大学工学部情報工学科助手,現在に至る.進化計算・強化学習の研究に従事.IEEE, ISGEC, JSAI, SICE の会員.博士 (情報学)