problem/need statement concepts & renderings requirements user interface market survey ...
TRANSCRIPT
Humanoid Robot Head: May 09-11
Team:Dan Potratz
Cody GenkingerTim Meer
Jason PollardAndrew Taylor
Client/Advisor: Alex Stoytchev
Planning and System Design
Problem/Need Statement Concepts & Renderings Requirements User Interface Market Survey Risks Schedule Work Breakdown Deliverables

Problem/Need
Problem – At the beginning of the project there was a robotic frame with two mobile robotic arms, but a static shell for the head.
Need – The head needs to be capable of showing human-like facial emotions and movements.› Smile, frown, frustration, etc;› Tilt and pan the head, eyes.
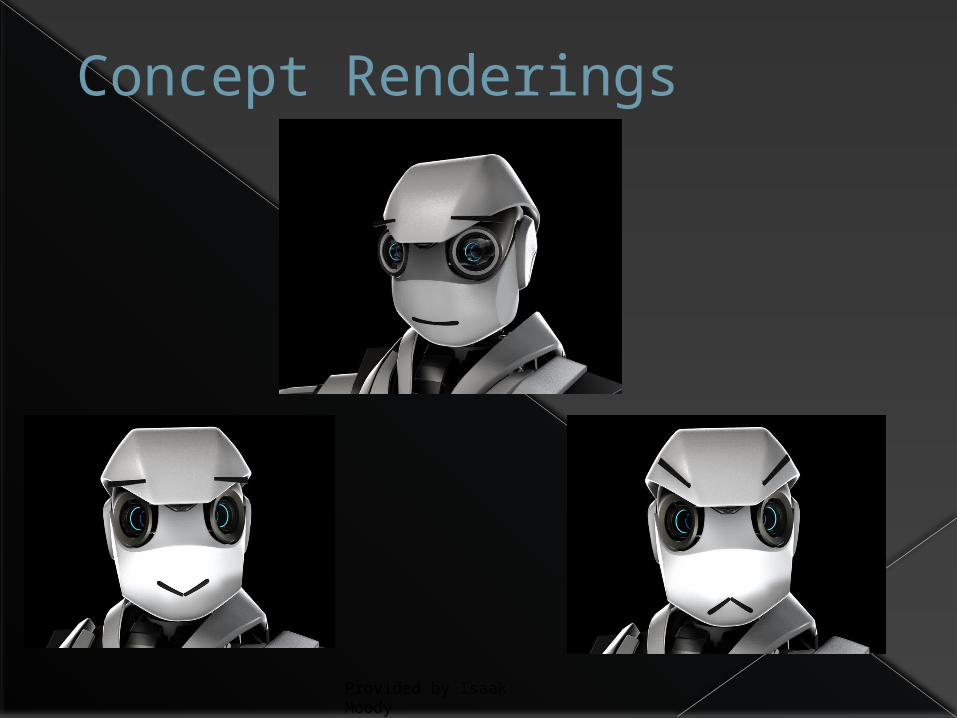
Concept Renderings
Provided by Isaak Moody
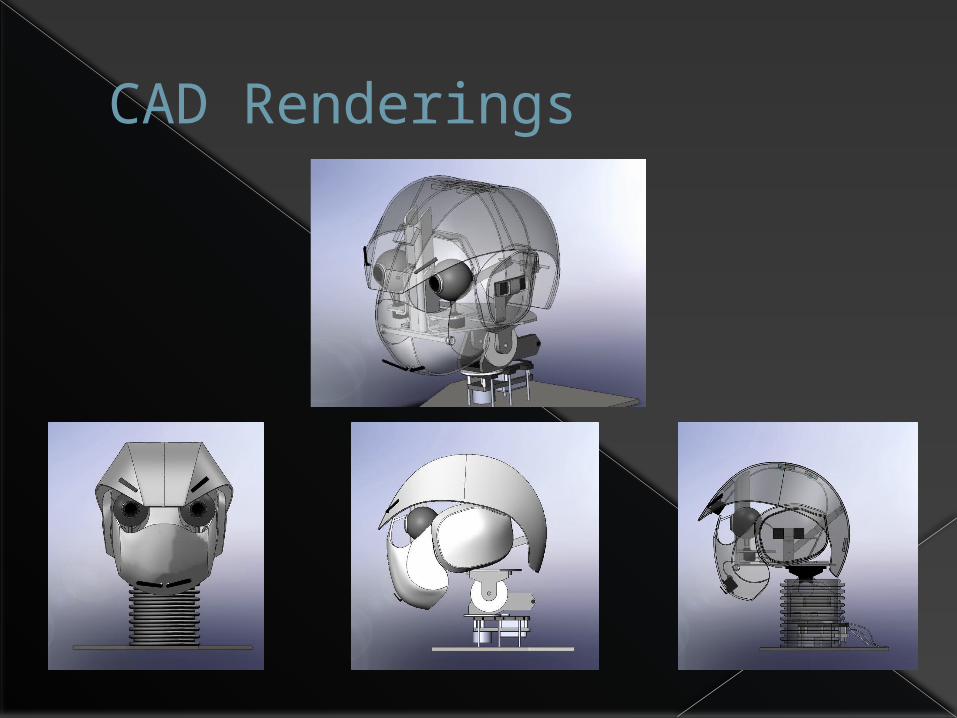
CAD Renderings

System Requirements F Req#001 – The head shall move front to back within a 90°
arc of motion with a velocity that will be equivalent to 90° per second
F Req#002 – The head shall move left to right within a 90° arc of motion with a velocity that will be equivalent to 90° per second.
F Req#003 – Mouth motions shall be handled by two servos, with a 180 degree arc of motion.
F Req#004 – Eyebrows shall be handled by a single servo, with a 180 degree arc of motion.
F Req#005 – A camera shall be implemented within the head or body to provide visual feedback for
processing by the operator. F Req#006 – The eyes shall be able to move on two axes,
with a 30 degree arc in each direction.
System Requirements
NF Req#001 – The head shall look clean and nonthreatening, while retaining human-like attributes.
NF Req#002 – API shall be done within C#. Interfaces will be done in C#.
NF Req#003 – Movement of the head shall be smooth and well transitioned.
NF Req#004 – Motors shall be quiet and not distracting. NF Req#005 – API shall follow format of existing arm API. NF Req#006 – The microcontroller board shall be
connected to our PC via serial or USB. NF Req#007 – Servo wiring shall be twisted pair to
maintain low noise emission.
User Interface Specification:
Overview User-directed scripting for robot
animations.› Record and playback scripts
Manually adjust each facial and neck part.
Adjust hardware related options.

User Interface Specification:
Goals To create animations for head To create a clean, easy to understand
interface To create a stable interface with:
› Proper error reporting› Feedback for the user› Crash acknowledgement
Risks
Technical:› Servo controller/motor malfunction.› Difficulties integrating serial interface.
Financial:› Parts may exceed small budget.› Loss/denied funding for project/parts.
Schedule:› Shipping delays› Course work delays project tasks
Customer Acceptance› Not pleased with result/design and documentation› Solution might exceed budget
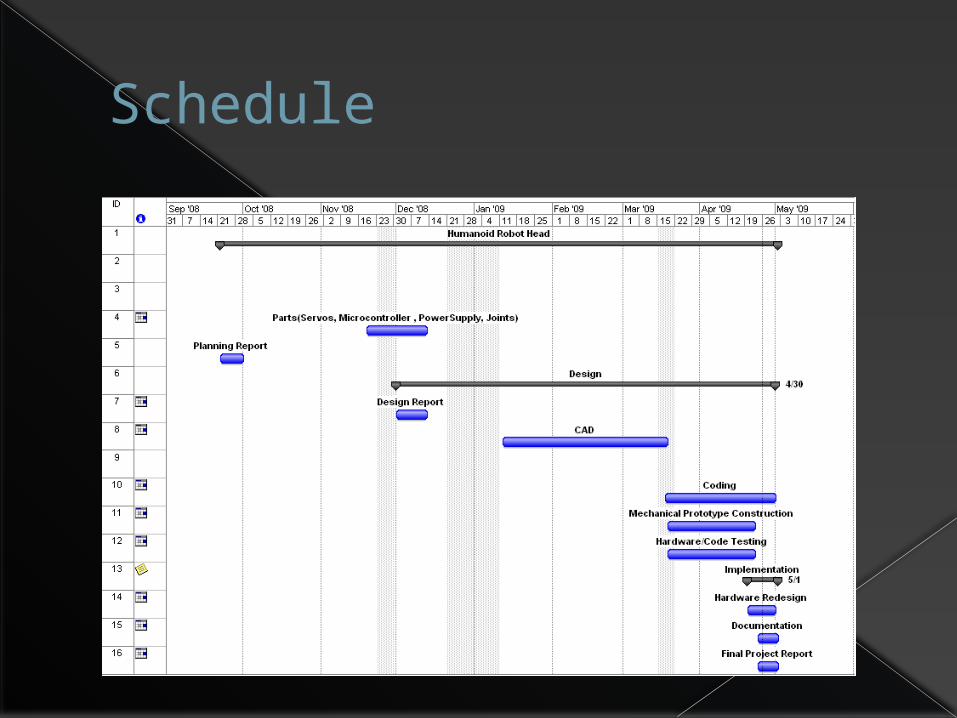
Schedule

Work Breakdown
CAD
Coding
Parts Selection
Prototype Construction
Testing
Documentation
Redesign
Final Report
Planning Report
Design Report

Market Survey
Specific to the design of our head, there are few similar projects.› MIT
Mobile/Dexterous/Social “MDS” Nexi Leonardo Kismet
› Philips Research iCat
› University of Hertfordshire KASPAR

Deliverables
System Design
Functional Decomposition Specifications Testing Prototyping Documents
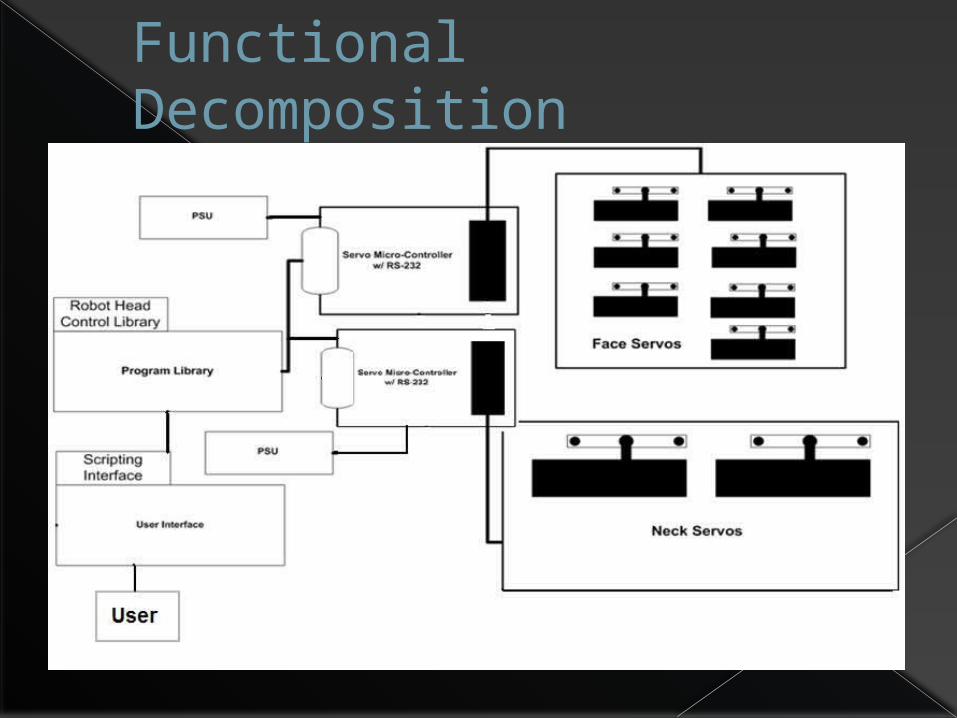
Functional Decomposition
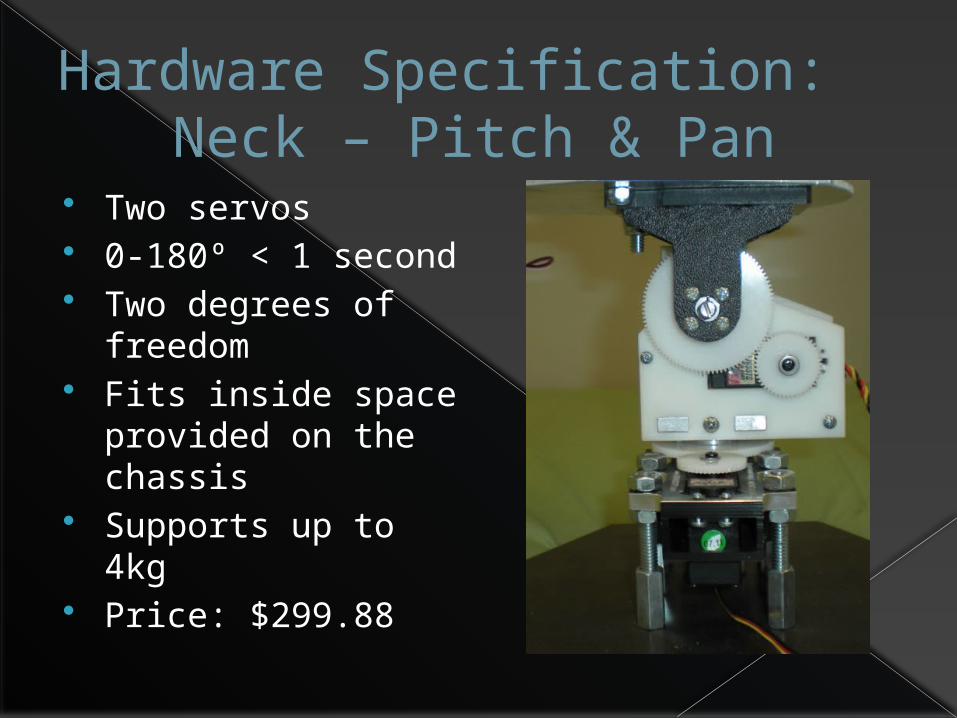
Hardware Specification: Neck – Pitch & Pan
Two servos 0-180º < 1 second Two degrees of
freedom Fits inside space
provided on the chassis
Supports up to 4kg Price: $299.88
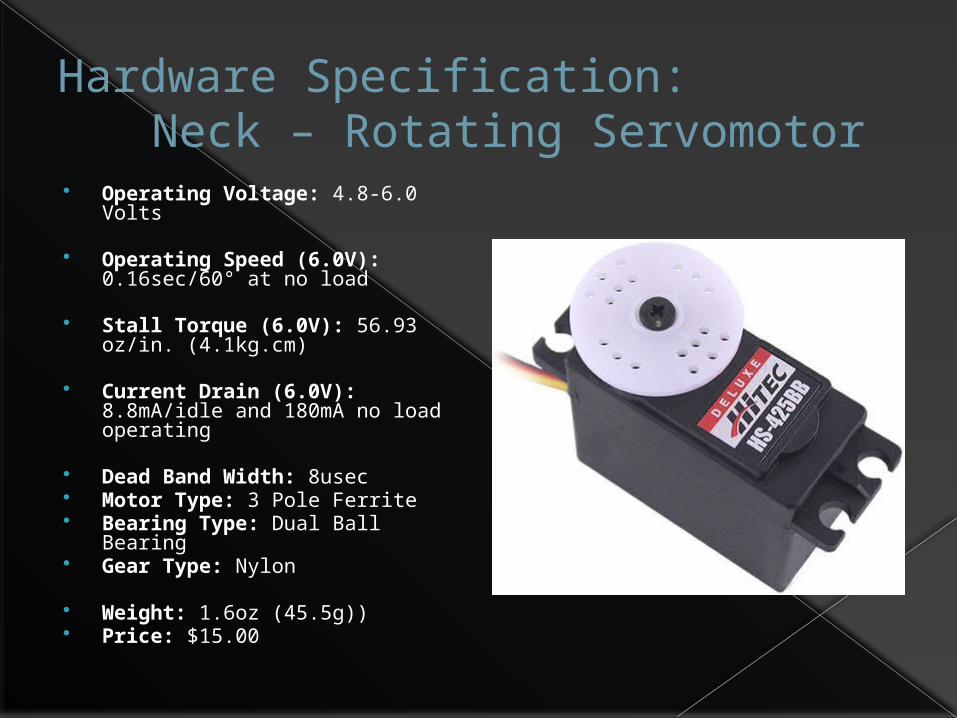
Hardware Specification: Neck – Rotating Servomotor
Operating Voltage: 4.8-6.0 Volts
Operating Speed (6.0V): 0.16sec/60° at no load
Stall Torque (6.0V): 56.93 oz/in. (4.1kg.cm)
Current Drain (6.0V): 8.8mA/idle and 180mA no load operating
Dead Band Width: 8usec Motor Type: 3 Pole Ferrite Bearing Type: Dual Ball Bearing Gear Type: Nylon
Weight: 1.6oz (45.5g)) Price: $15.00
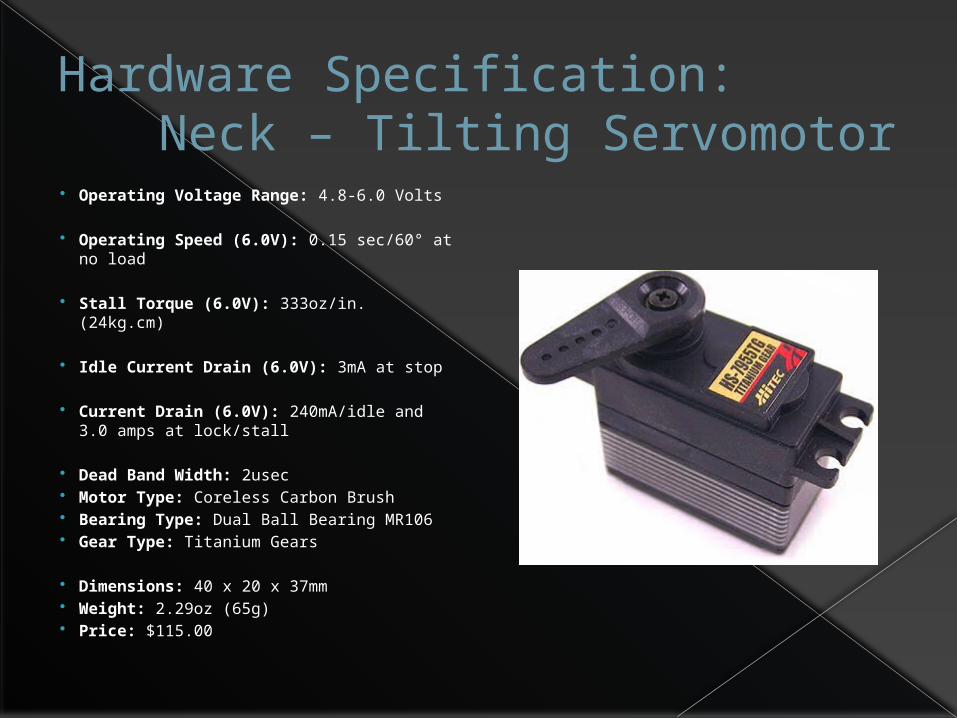
Hardware Specification: Neck – Tilting Servomotor
Operating Voltage Range: 4.8-6.0 Volts
Operating Speed (6.0V): 0.15 sec/60° at no load
Stall Torque (6.0V): 333oz/in. (24kg.cm)
Idle Current Drain (6.0V): 3mA at stop
Current Drain (6.0V): 240mA/idle and 3.0 amps at lock/stall
Dead Band Width: 2usec Motor Type: Coreless Carbon Brush Bearing Type: Dual Ball Bearing MR106 Gear Type: Titanium Gears
Dimensions: 40 x 20 x 37mm Weight: 2.29oz (65g) Price: $115.00
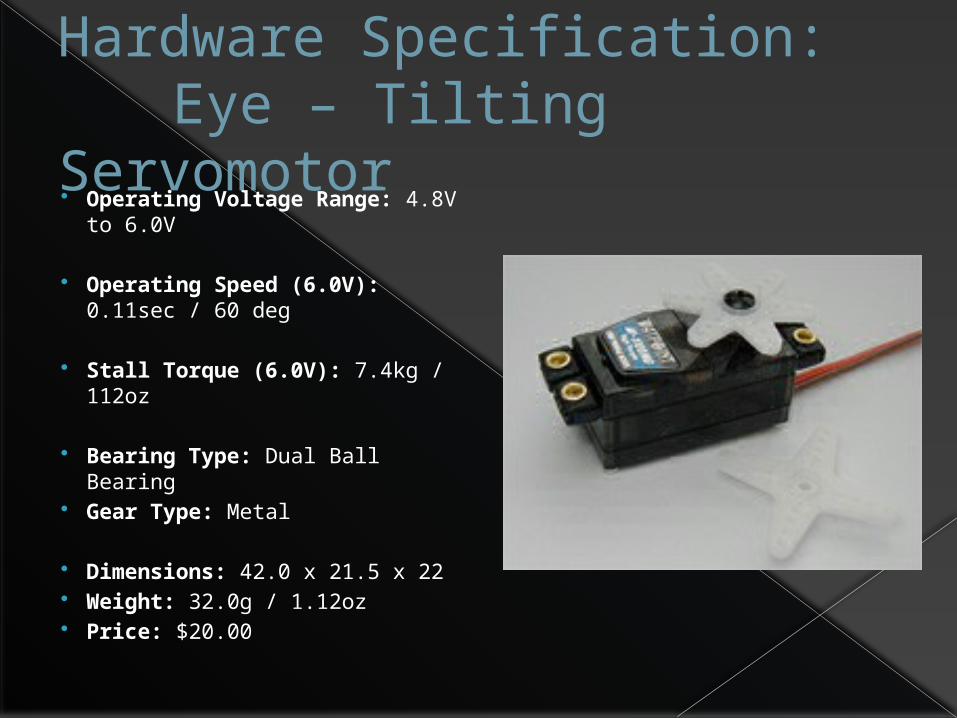
Hardware Specification: Eye – Tilting Servomotor
Operating Voltage Range: 4.8V to 6.0V
Operating Speed (6.0V): 0.11sec / 60 deg
Stall Torque (6.0V): 7.4kg / 112oz
Bearing Type: Dual Ball Bearing
Gear Type: Metal
Dimensions: 42.0 x 21.5 x 22 Weight: 32.0g / 1.12oz Price: $20.00

Hardware Specification: Face – Servomotors
Operating Voltage: 4.8-6.0 Volts
Operating Speed (6.0V): 0.09sec/60° at no load
Stall Torque (6.0V): 23.5 oz/in. (1.7kg.cm)
Motor Type: 3 Pole Ferrite
Bearing Type: Top Ball Bearing Gear Type: All Nylon Gears
Dimensions: 21.8 x 11 x 19.8mm
Weight: .27oz. (7.8g) Price: $14.00 each
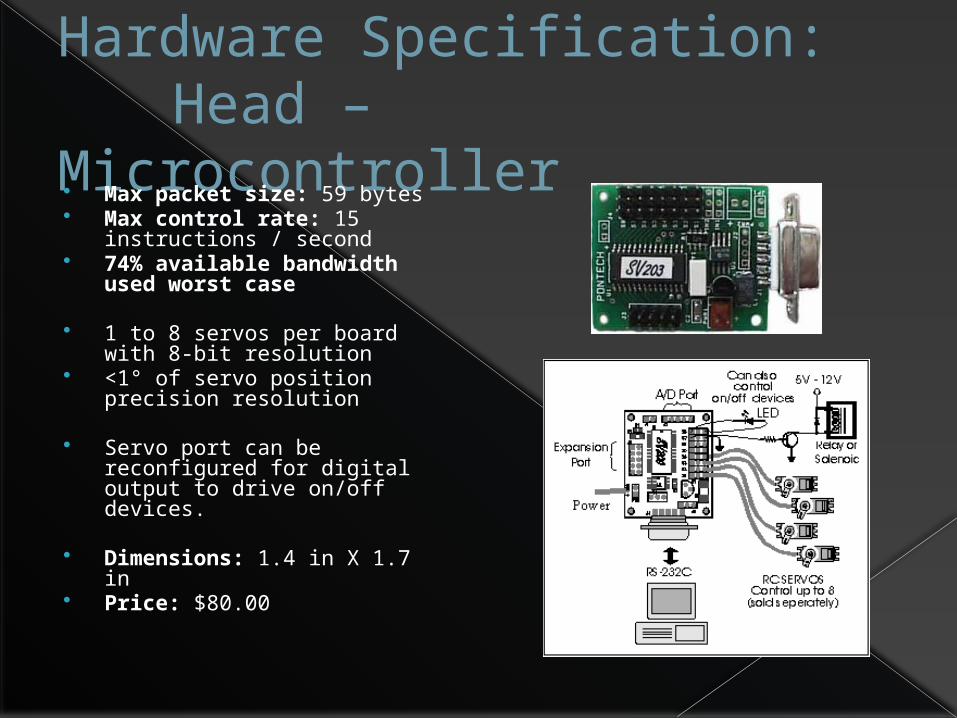
Hardware Specification: Head – Microcontroller
Max packet size: 59 bytes Max control rate: 15
instructions / second 74% available bandwidth
used worst case
1 to 8 servos per board with 8-bit resolution
<1° of servo position precision resolution
Servo port can be reconfigured for digital output to drive on/off devices.
Dimensions: 1.4 in X 1.7 in Price: $80.00
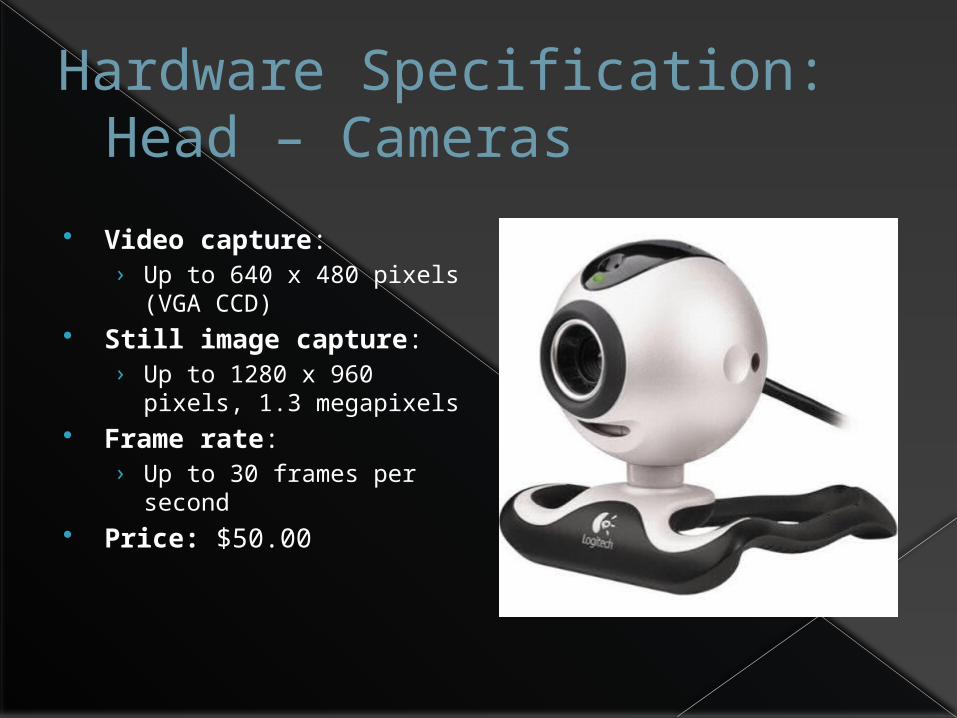
Hardware Specification: Head – Cameras
Video capture: › Up to 640 x 480 pixels
(VGA CCD) Still image capture:
› Up to 1280 x 960 pixels, 1.3 megapixels
Frame rate: › Up to 30 frames per
second Price: $50.00
Hardware Specification: Testing
Servos› Function Generator› Oscilloscope› Bench-Top DC Power Supply
Microcontroller Board› Oscilloscope› Computer with serial connection› HyperTerminal Communication Software› Bench-Top DC Power Supply
Power Supply› Bench-Top Multimeter› Bench-Top DC Power Supply

User Interface

Software Specification: Overview
Software tools to allow for interaction with robotic head› RS-232 Instructions
Broad library› Easy to develop scripts› Implementation
Written in C#
Software Specification: Goals
Broad functions that allow for full movement control› Each servo is controlled and receives feedback
from microcontroller. Descriptive functions
› Anticipate future changes› Easy to read and use
Command hierarchy› Reduce redundant code› Stable functions› Easy to create new functions.
Software Specification:Library
Robot Head class› Provides functions for controlling each servo
(face, eyes, neck) Graphical User Interface
› Allow script building Listbox – easy to manage and build scripts Building facial positions (eyebrows and mouth)
› Interface with controller Allow for direct control of head Mapping buttons to face emotions
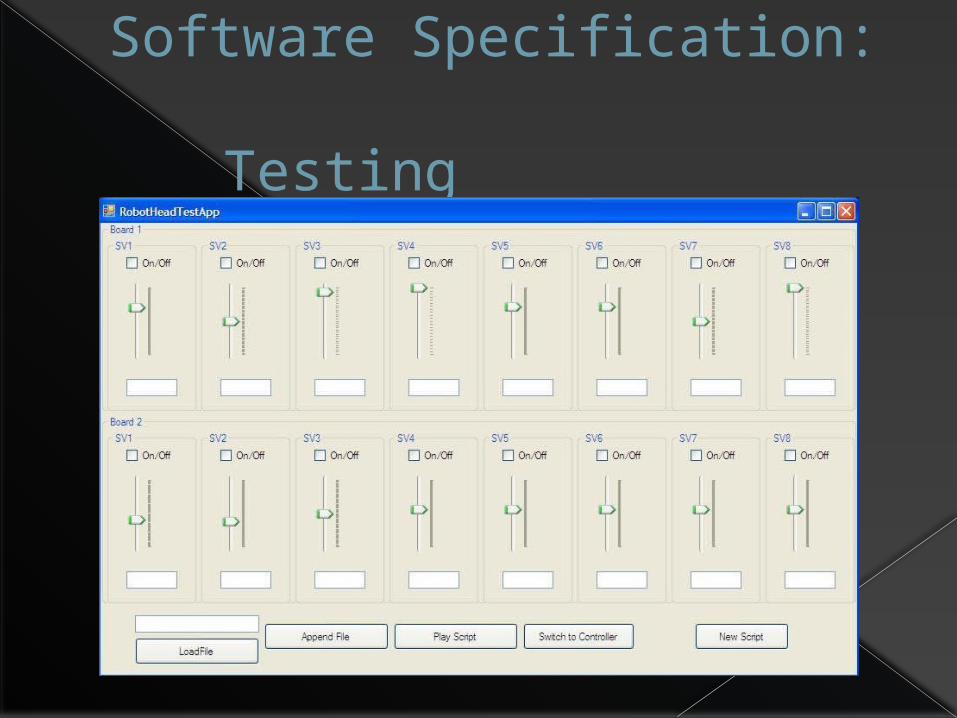
Software Specification: Testing
Software Specification: Testing
Unit Testing:› Test each software component.› Ensure each component works to design.
Software System Testing:› Manual test using HyperTerminal› Ensure system works to design.
User Validation› Ensures design overall correctness.
Simulation & Prototyping
Simulations run as head was constructed
Several prototype versions› Plastic pieces not built to spec› Client’s desire to change final details
Test Results
Head can operated for 4+ hours No program crashing in 4+ hours of
continuous use No overheating during 4+ hours Some jitter still present in the eye tray When head reaches outer bounds,
servos start to rubberband
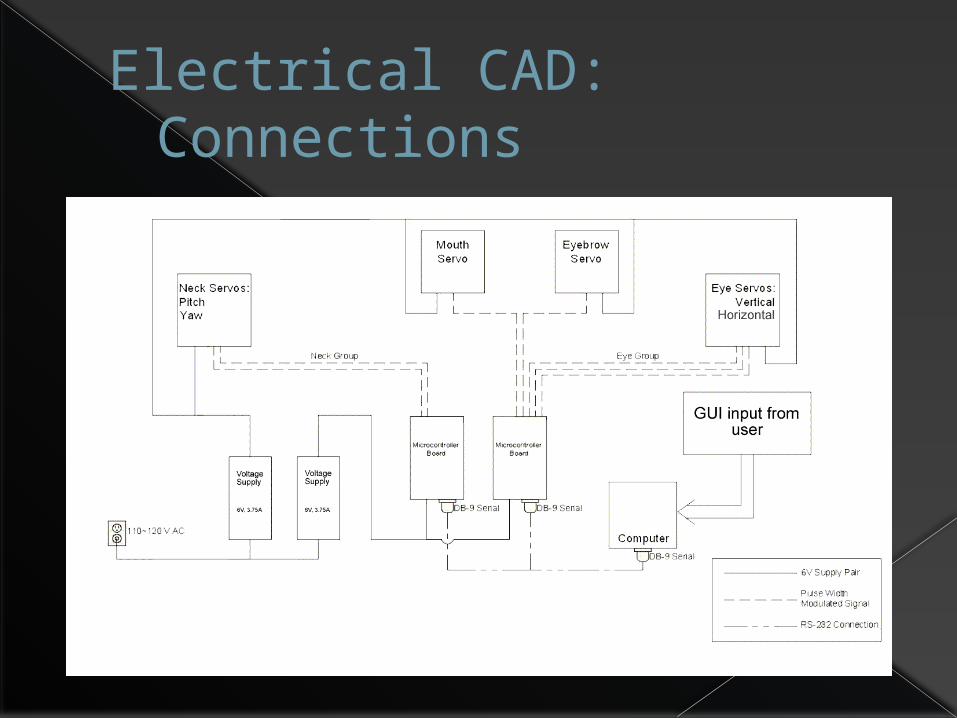
Electrical CAD:Connections

Mechanical CAD:Helmet

Implementation
Final Builds Complications & Conclusions Future Work

Robot Head:Final Build CAD

Robot Head:Final Build CAD
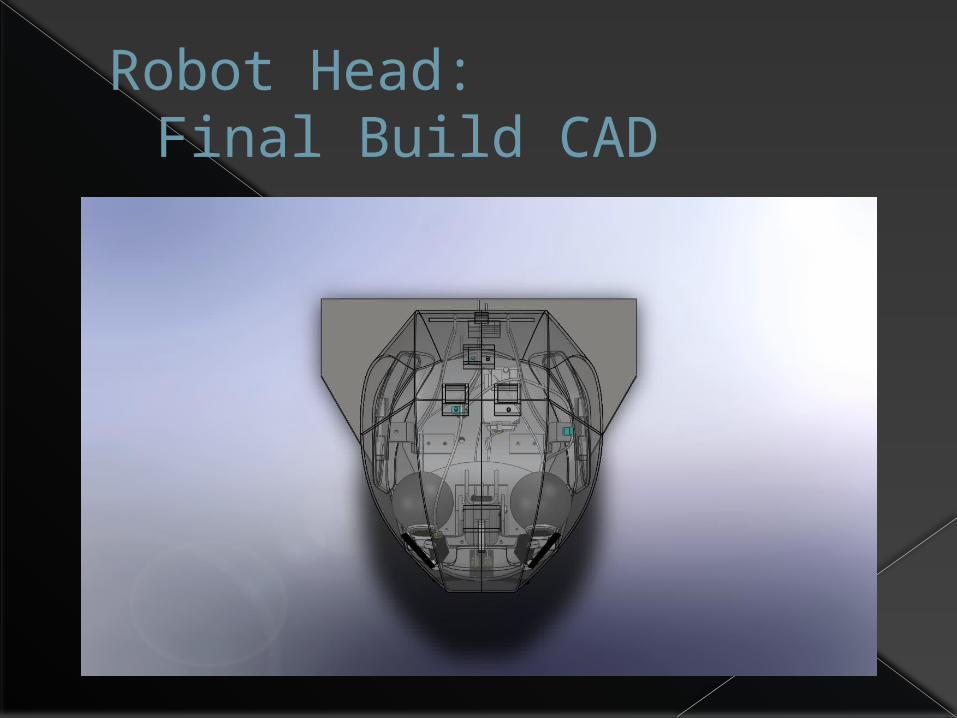
Robot Head:Final Build CAD
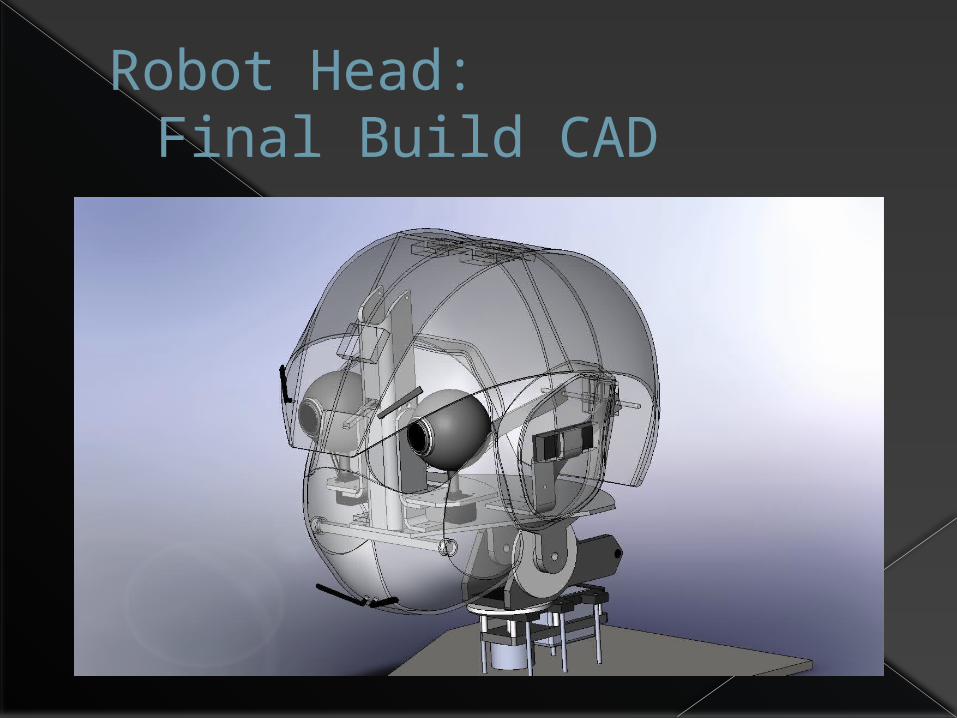
Robot Head:Final Build CAD
Complications
Servos› Overheating› Stalling out› Jumping gears
Plastic› Not printed to spec
Software› Cross-communication between microcontrollers› Communication blocking during transmission to
serial board

Future Work
Cameras Microphones

Demonstration
Questions