Обзор проекта webot - применение и архитектура...
TRANSCRIPT

Wicron
www.wicron.com

Робот удалѐнного присутствия Webot
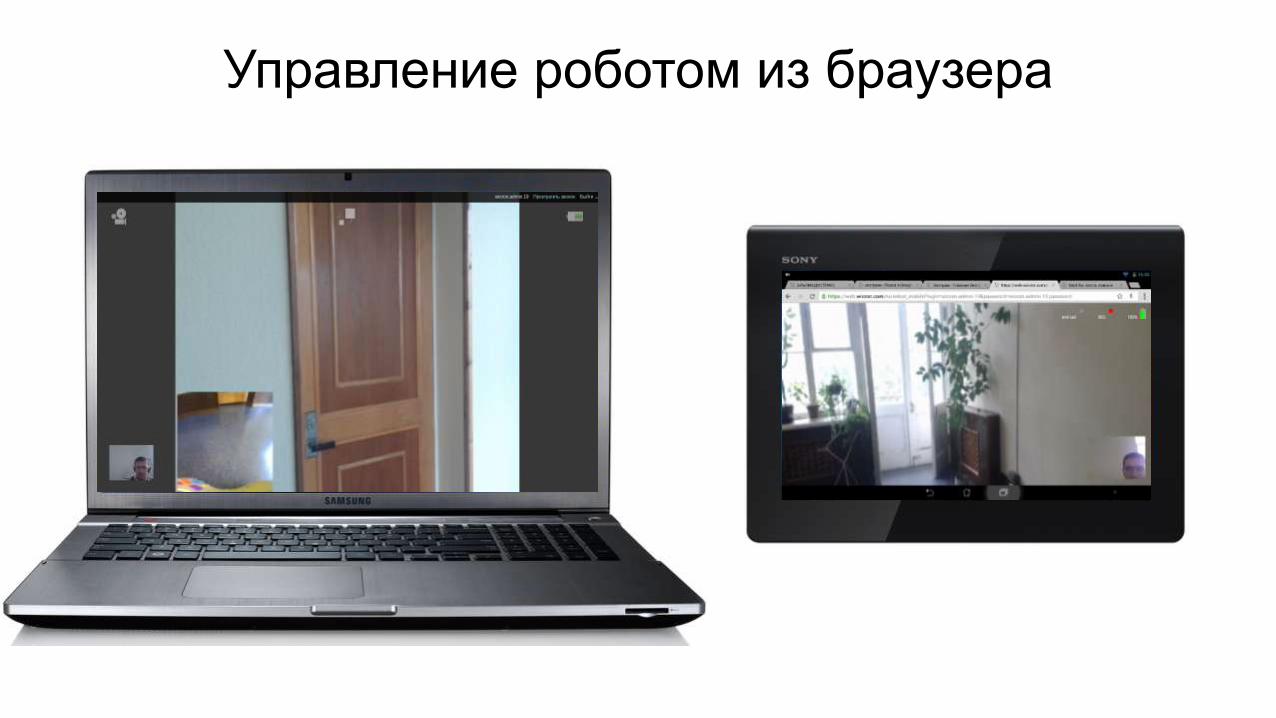
Управление роботом из браузера
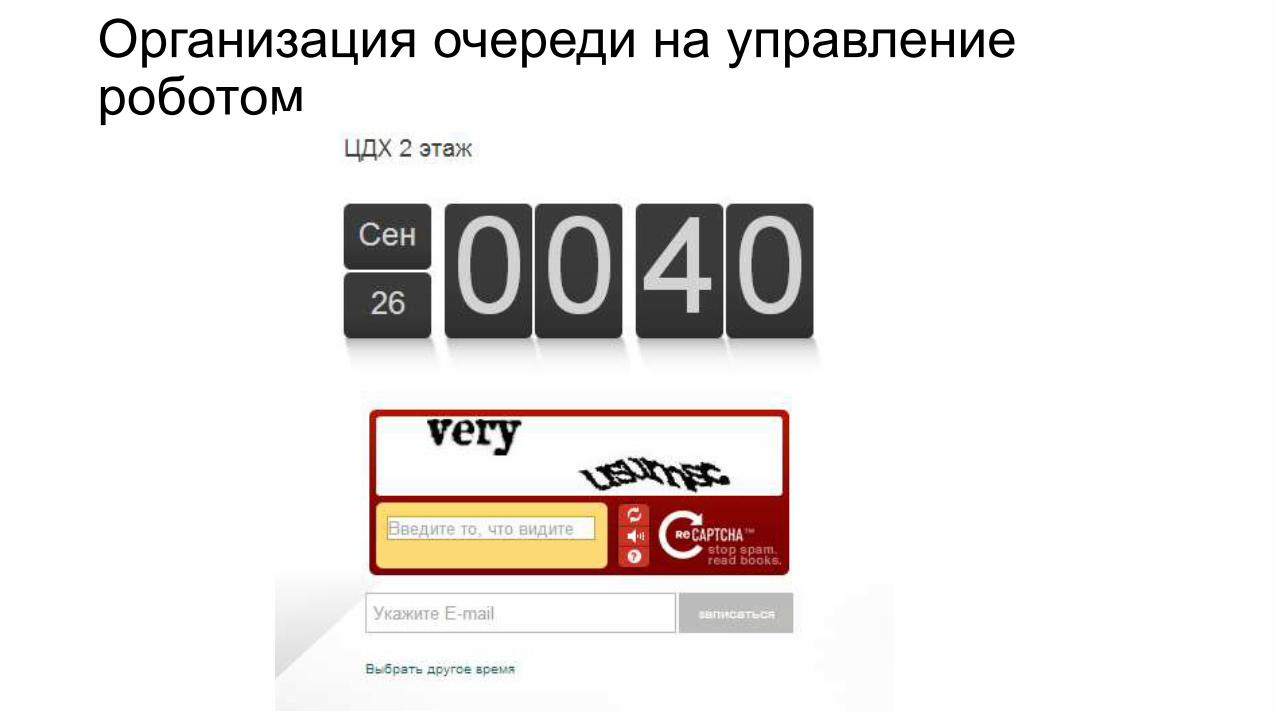
Организация очереди на управление роботом
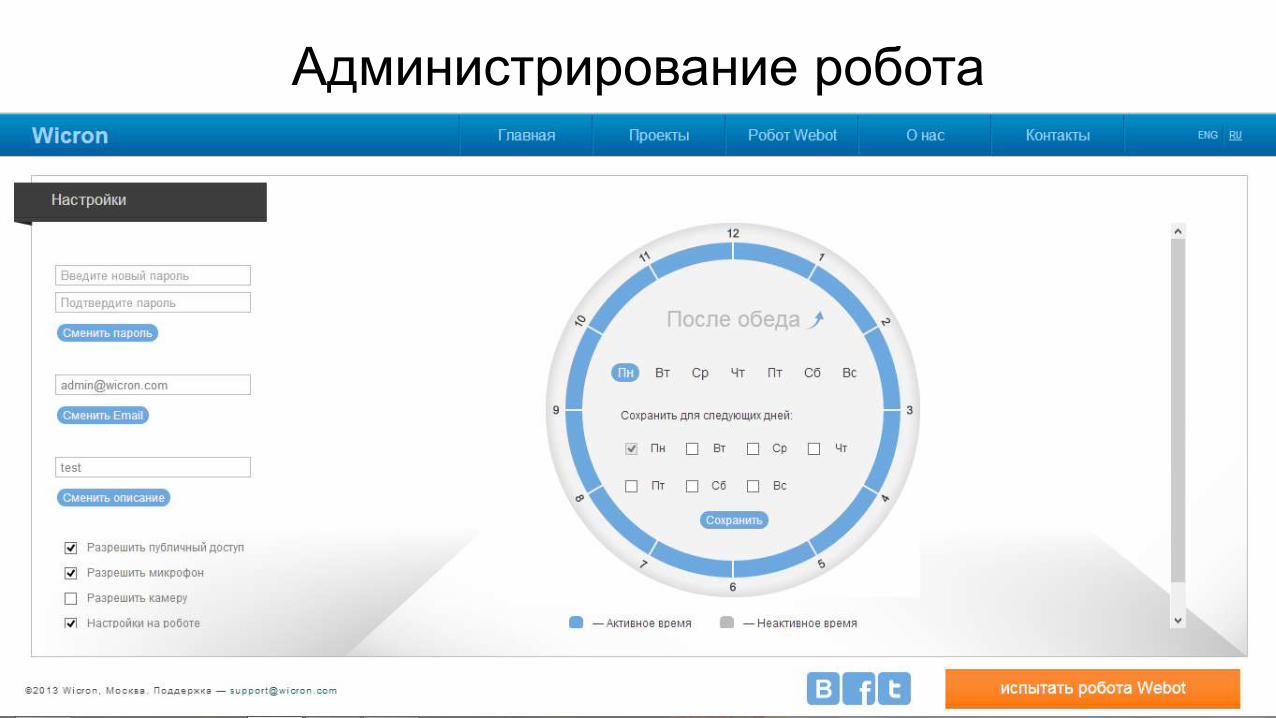
Администрирование робота
Преимущества робота перед конкурентами
• Значительно улучшенное качество видеосвязи;
• Возможность размещать страницу доступа к роботу на интернет-сайте клиента;
• Управление из браузера без установки дополнительных плагинов;
• Возможность управления роботом с планшетных и настольных компьютеров;
• Длительное время автономной работы - до 12 часов;
• Простое управление и улучшенные возможности обзора пространства;
• Возможность запреты езды в определённые места при помощи магнитной ленты;
• Наличие грамотной технической поддержки в России.

Применение: посещение удалѐнных мест

Применение: присутствие квалифицированных специалистов в
отдалѐнных местах
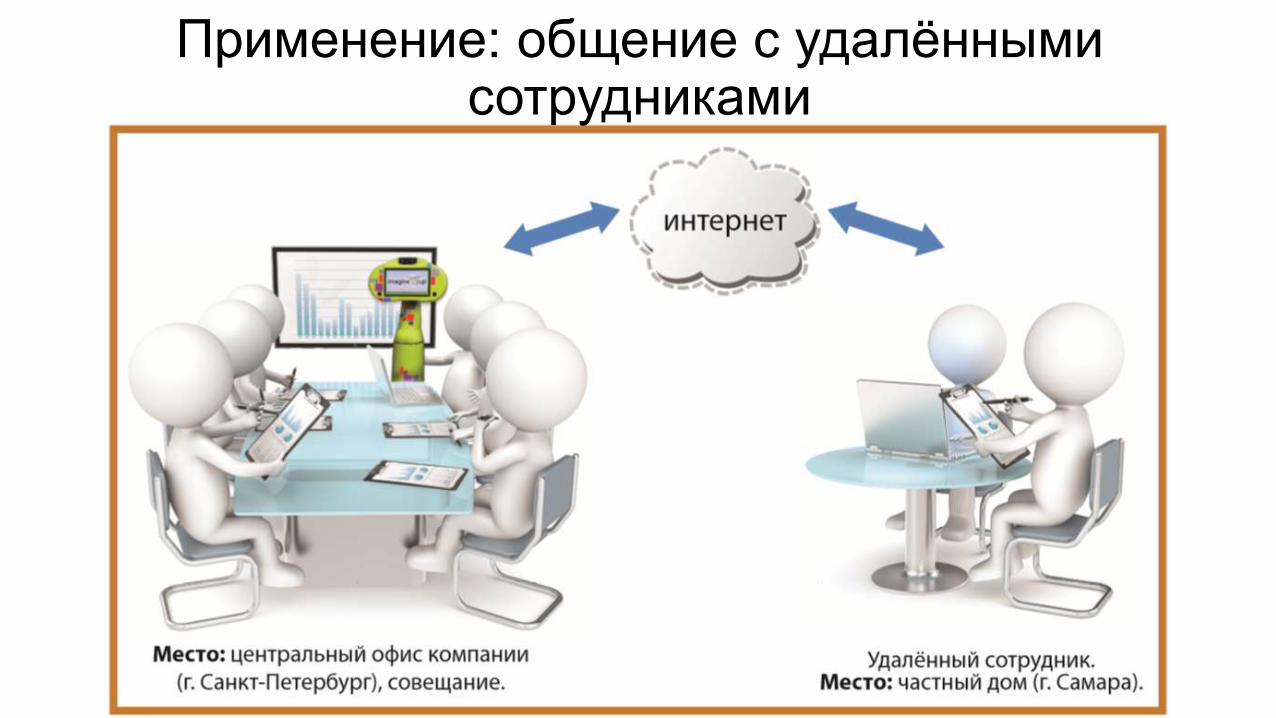
Применение: общение с удалѐнными сотрудниками

Применение: консультирование покупателей в торговых залах
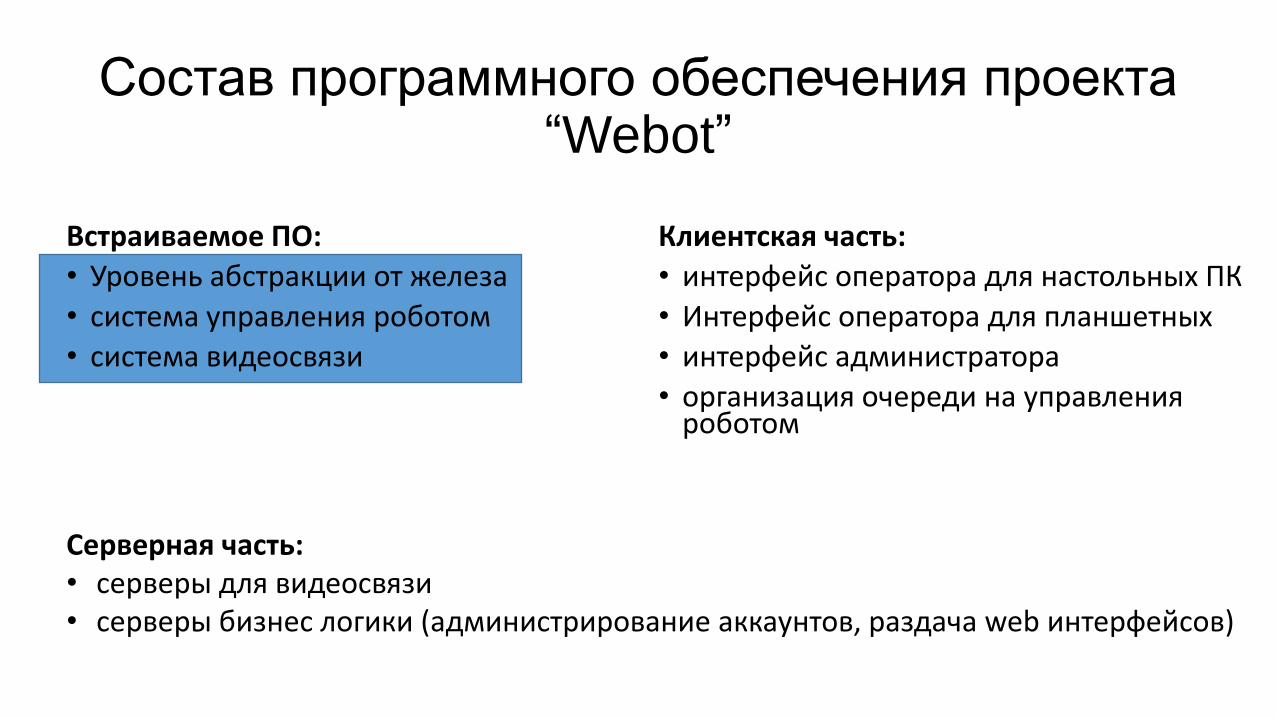
Состав программного обеспечения проекта “Webot”
Встраиваемое ПО:
• Уровень абстракции от железа
• система управления роботом
• система видеосвязи
Клиентская часть:
• интерфейс оператора для настольных ПК
• Интерфейс оператора для планшетных
• интерфейс администратора
• организация очереди на управления роботом
Серверная часть:• серверы для видеосвязи• серверы бизнес логики (администрирование аккаунтов, раздача web интерфейсов)
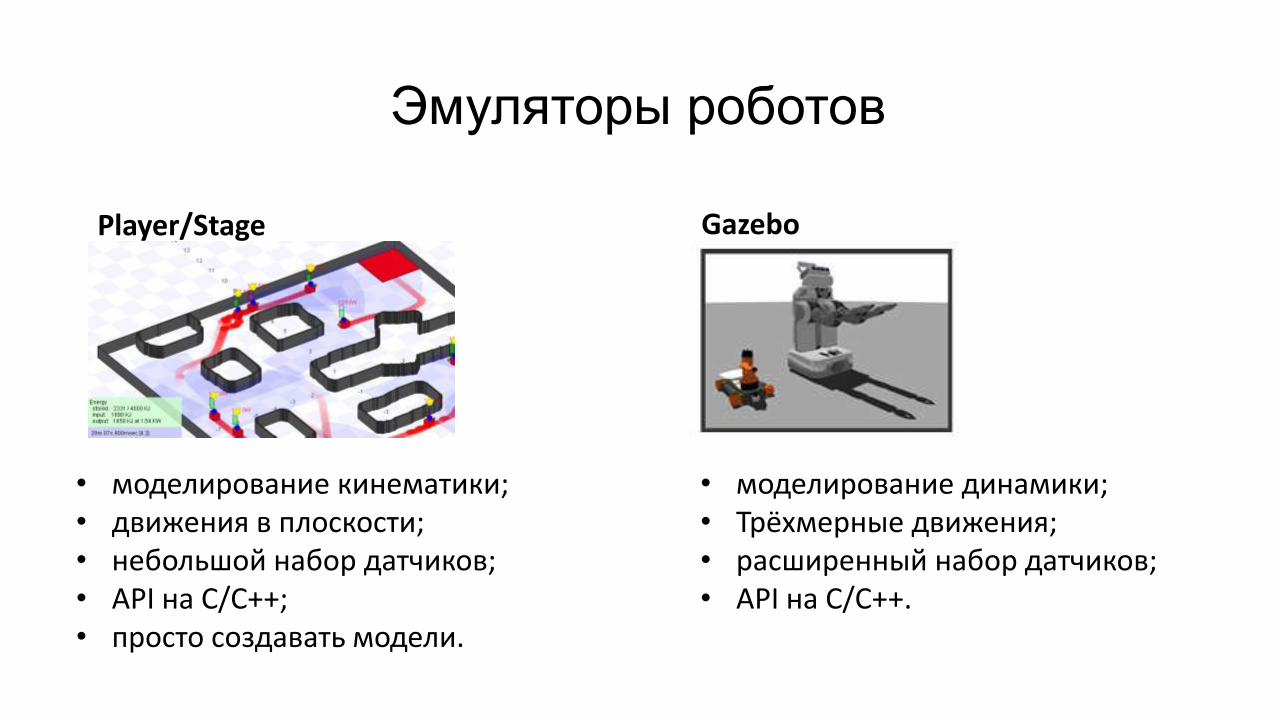
Эмуляторы роботов
GazeboPlayer/Stage
• моделирование кинематики;• движения в плоскости;• небольшой набор датчиков;• API на C/C++;• просто создавать модели.
• моделирование динамики;• Трёхмерные движения;• расширенный набор датчиков;• API на C/C++.
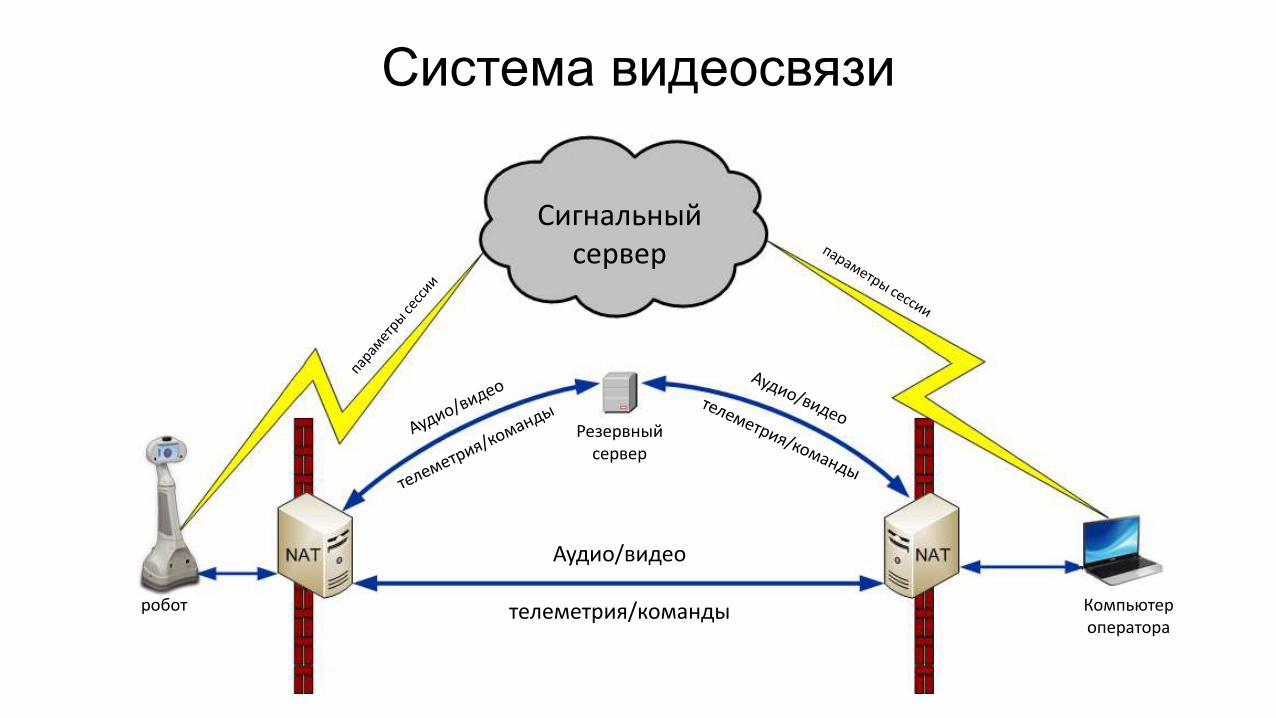
Система видеосвязи
Сигнальный сервер
Компьютер оператора
робот
Резервный сервер
Аудио/видео
телеметрия/команды
Состав системы управления робота “Webot”
Управление оператором:
• Управление скоростью робота;
• Обнаружение магнитных лент;
• Автоматическое движение робота.
Автономный режим:
• Локализация и составление карты;
• Планирование траектории.
Управление скоростью робота
Задача:
Привода максимально быстро должны отрабатывать требуемую скорость вращения для удобства управления оператором.
Проблемы:
• привода могут работать в разных условиях (один на ковре, один на паркете);
• разная скорость износа приводов;
• немного разные параметры приводов.
Решение:
Система управление по скорости на основе ПИД-регулятора
Автоматическое движение робота
Задача:
Робот должен в автоматическом режиме следовать вдоль требуемой траектории, чтобы покинуть запрещённую зону.
Проблемы:
• привода не идеально отрабатывают требуемую скорость;
• необходимо знать положение робота.
• Условия работы робота могут резко измениться (его может кто-то толкнуть, может переехать на другую поверхность).
Решение:
• Робот ездит по прямым и поворачивает на месте;
• Система управление положением робота на основе двух ПИД-регуляторов: ПИД-регулятор по угловой ошибке и ПИД-регулятор по ошибке расстояния.
Локализация и составление карты(в разработке)
Задача:
Необходимо составить карту помещения и не давать оператору заезжать в запрещённые мета, отмеченные заранее.
Проблемы:
• показания со сканирующего лазерного дальномера сильно зашумлены;
• одометрия ошибается примерно на 10 %.
Решение:
• Алгоритм локализации и составления карты на основе фильтра частиц
Планирование траектории(в разработке)
Задача:
Необходимо спланировать траекторию покидания запрещённой зоны.
Проблемы:
• Необходимо объезжать динамические препятствия (людей)
Решение:
• Алгоритм планирования траектории на основе A*.
Контакты
ООО ВикронМосква, Россия
1-я Парковая улица, 7, офис 501 www.wicron.com
[email protected]+7 495 640–57–35