04 elementos de um sistema mecânico - ime.usp.br7eoda/contents/01matem%e1tica/01... · um sistema...
TRANSCRIPT
Elementos de um Sistema Mecânico 1
1 INTRODUÇÃO
Um sistema mecânico é composto puma estrutura fixa. O sistema mtambém denominado sistema padamortecedor. Tal sistema servirádiferencial do movimento de sistestudar cada um dos componentes
2 MOLAS
2.1 Definição
Entende-se por mola uma peça quapresenta grandes deformações qualguma flexibilidade, já que não exela está aplicada, armazenando ene
2.2 Classificação
As molas podem ser classificadas, lineares e não-lineares.
Uma mola é dita linear quando as dcargas a que ela é submetida, ou dizer que ela obedece ao Princípiolinear em caso contrário. Se formedidas as deformações (respostade linearidade, conforme mostra a no caso de sistemas torcionais) etorcional θ).
04
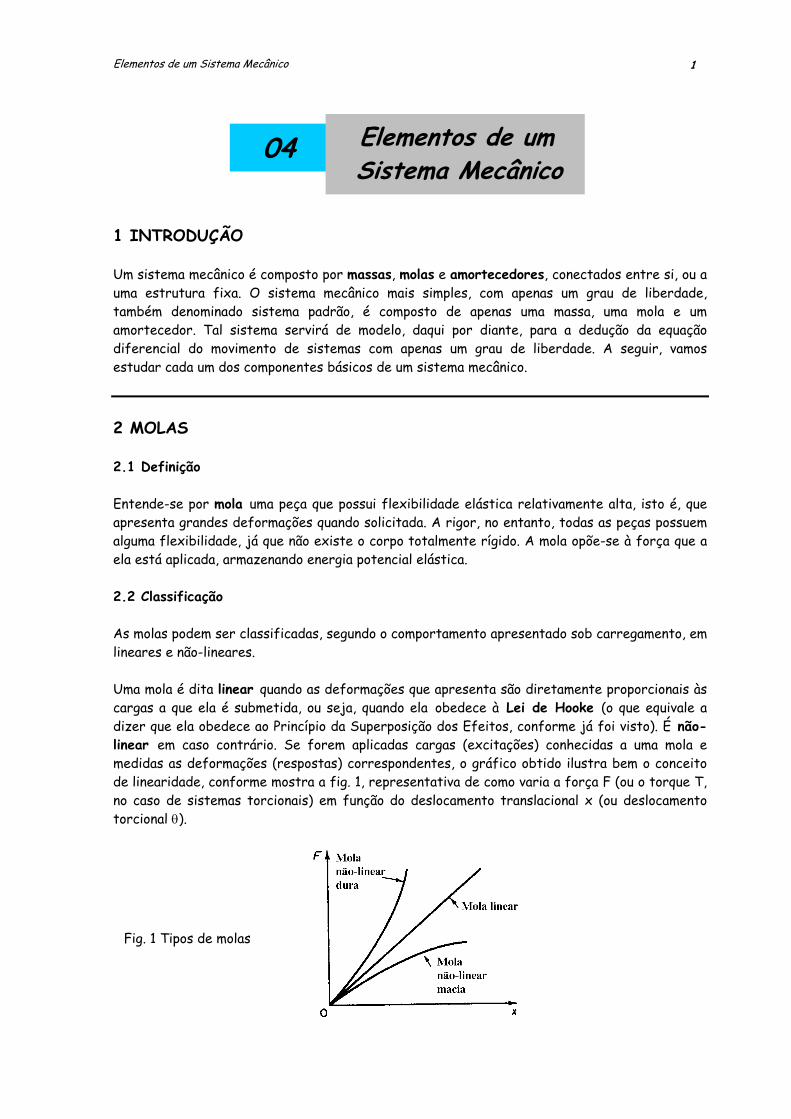
Fig. 1 Tipos de molas
Elementos de um Sistema Mecânico
or massas, molas e amortecedores, conectados entre si, ou aecânico mais simples, com apenas um grau de liberdade,rão, é composto de apenas uma massa, uma mola e um de modelo, daqui por diante, para a dedução da equaçãoemas com apenas um grau de liberdade. A seguir, vamosbásicos de um sistema mecânico.
e possui flexibilidade elástica relativamente alta, isto é, queando solicitada. A rigor, no entanto, todas as peças possuemiste o corpo totalmente rígido. A mola opõe-se à força que argia potencial elástica.
segundo o comportamento apresentado sob carregamento, em
eformações que apresenta são diretamente proporcionais àsseja, quando ela obedece à Lei de Hooke (o que equivale a da Superposição dos Efeitos, conforme já foi visto). É não-em aplicadas cargas (excitações) conhecidas a uma mola es) correspondentes, o gráfico obtido ilustra bem o conceitofig. 1, representativa de como varia a força F (ou o torque T,m função do deslocamento translacional x (ou deslocamento

Elementos de um Sistema Mecânico 2
Na fig. 1, a mola linear é representada por uma reta, ao passo que as molas não-lineares têmdois tipos de representação. Algumas molas não-lineares "endurecem" à medida que aumenta asolicitação, ou seja, é cada mais difícil deformá-las: são as chamadas molas duras, cujarepresentação gráfica é uma curva côncava para cima. As molas não-lineares de comportamentooposto denominam-se molas macias e sua representação gráfica é contrária à das molas duras.Existe uma pequena faixa na qual as molas não-lineares apresentam comportamento quase igualao das molas lineares. É a chamada faixa linear, que ocorre em torno de um certo ponto deequilíbrio, denominado ponto de operação. Por esse motivo, o estudo das Vibrações Linearesassume um papel de destaque.
2.3 Rigidez. Flexibilidade
A inclinação da curva (ver fig. 1) F = F(x) ou T = T(θ) em um determinado ponto recebe o nomede rigidez da mola:
α=θ
=α== tg d
dTk ou tgdxdFk (1)
onde α é o ângulo que a tangente geométrica no ponto faz com o eixo das abcissas.
No caso particular de mola linear, a inclinação α é constante e é usual chamar a rigidez, então,de constante da mola:
k = F/x ou k= T/θ (2)
Quanto maior o k da mola, maior é o esforço necessário para se obter o mesmo deslocamento,ou seja, mais rígida é a mola. A unidade SI de rigidez é [N/m], se a mola for longitudinal, ou[N.m/rad], se a mola for torcional.
Neste trabalho serão consideradas apenas as molas lineares.
2.4 Cálculo da Rigidez
O cálculo da rigidez de uma mola pode ser feito experimentalmente ou teoricamente.Experimentalmente, podemos aplicar sobre a mola cargas conhecidas e medir os deslocamentoscorrespondentes. A seguir, aplicamos a equação (2) para cada par de carga e deslocamento e,após, calculamos um valor médio, representativo da faixa considerada. Teoricamente, podemoscalcular a rigidez através da aplicação de conhecimentos de Resistência dos Materiais.
Exemplo 1: Barra de tração
Seja, por exemplo, uma barra submetida à tração F, apresentando uma deformação x, conformefig. 2. A mola tem seção constante A, comprimento l e módulo de elasticidade longitudinal
Fig. 2 Barra de tração

Elementos de um Sistema Mecânico 3
(Módulo de Young) E. Calcular a sua rigidez.
Solução:
Ao ser aplicada a força F, a barra sofre um alongamento x, dado por:
EAFlx =
Substituindo x na eq. (2):
lEAk =
Vemos, portanto, que a rigidez não depende da carga a que é submetida, mas do material (E) edas dimensões (l, A).
Exemplo 2: Barra de torção
Deduzir uma expressão para a rigidez de uma mola do tipo barra de torção de comprimento l,momento de inércia polar constante Ip, módulo de elasticidade transversal G, submetida aum torque T.
Solução:
O ângulo de torção é dado por pGI
Tl=θ . Aplicando a definição de k e levando em conta essa
última equação: l
GI
GITlTTk p
p
==θ
=
2.5 Associações de Molas
É muito comum, na prática, encontrarmos duas ou mais molas associadas em um mecanismo. Afim de obter o sistema mecânico padrão, no qual existe apenas uma mola, há necessidade deencontrar uma mola fictícia cuja rigidez seja equivalente à da associação dada.
As associações mais comuns são: molas em série, molas em paralelo, molas associadas comalavancas, molas inclinadas e molas associadas com polias.
2.5.1 Associação Série
Inicialmente, serão consideradas apenas duas molas em série. A fig. 3 mostra, à esquerda, duasmolas em série de rigidezes conhecidas, k1 e k2, submetidas a uma força de tração F e, àdireita, uma mola equivalente fictícia submetida à mesma excitação.

Elementos de um Sistema Mecânico 4
Desejamos encontrar a rigidez equivalente k. Pelo Princípio da Superposição dos Efeitos, temos:
deflexão da mola 1, devida à carga F: x1 = F/k1
deflexão da mola 2, devida à carga F: x2 = F/k2
deflexão total: x = F/k
Logo, como x = x1 + x2: 1/ k = 1/k1 + 1/k2 (4)
2.5.2 Associação Paralela
Aqui também serão consideradas duas molas em paralelo. A fig. 4 mostra, à esquerda, duasmolas de rigidezes conhecidas, k1 e k2, solicitadas por uma força de tração F, aplicada paralela eeqüidistantemente das molas. Consideremos a existência de restrições laterais que obriguem asmolas a se distenderem igualmente e que não permitam a rotação da barra sem massa sobre aqual atua a força F, assegurando ao sistema apenas um grau de liberdade. À direita, temos osistema equivalente.
deflexão da mola 1: x1 = F1/k1
deflexão da mola 2: x2 = F2/k2
onde F1 e F2 são as cargas nas molas k1 e k2 , respectivamente. Por outro lado, no sistemaequivalente: x = F/k
onde F = F1 + F2
Logo: kx = k1x1 + k2x2
Tendo em vista que a deflexão é a mesma, isto é: x = x1 = x2, chegamos finalmente a
k = k1 + k2 (5)
Fig. 3 Molas em Série
Fig. 4 Molas em Paralelo
Elementos de um Sistema Mecânico 5
Observando as eq. (4) e (5), vemos que as mesmas são idênticas, respectivamente, às fórmulasdas associações série e paralelo de capacitâncias elétricas. Logo, existe uma analogiaeletromecânica entre capacitor e mola, o que não deve constituir surpresa, pois ambos sãoarmazenadores de energia. Tais analogias são muito úteis, sendo amplamente empregadas naanálise de sistemas dinâmicos. Podemos, pois, generalizar as equações. acima para n molas:
associação série:
∑=
= n
1i ik1
1k (6)
associação paralelo ∑=
=n
1iikk (7)
2.5.3 Associação de Molas com Alavancas
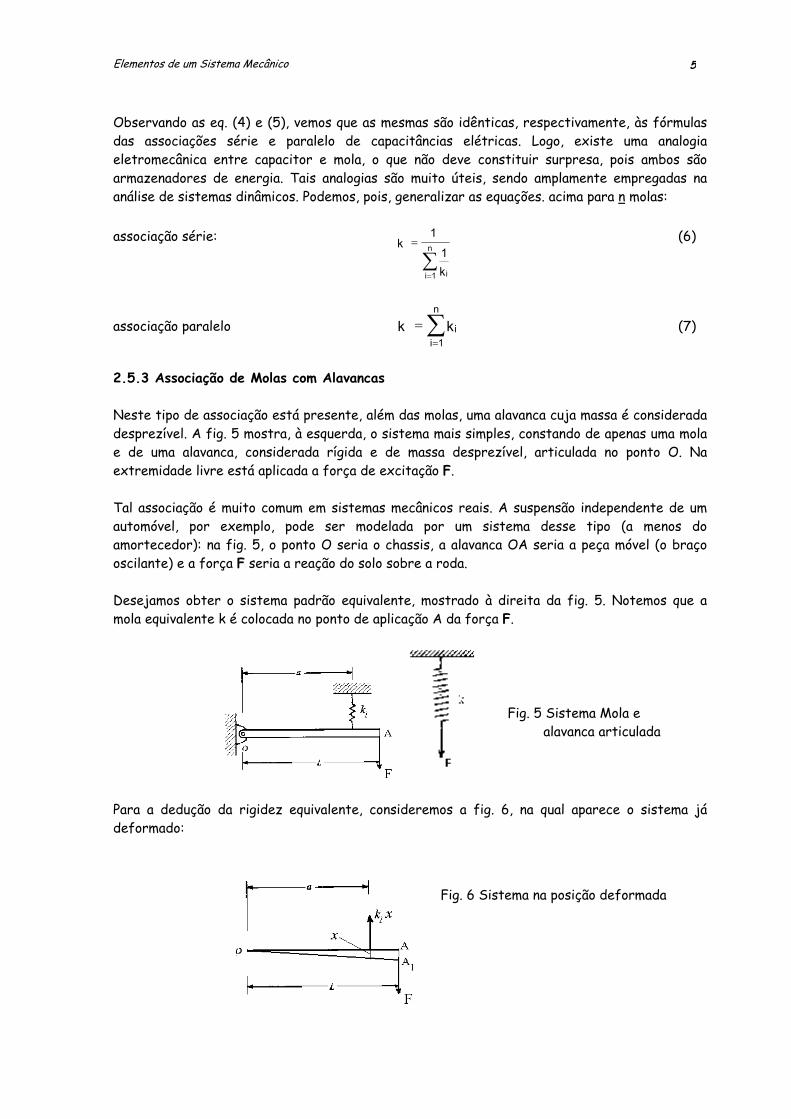
Neste tipo de associação está presente, além das molas, uma alavanca cuja massa é consideradadesprezível. A fig. 5 mostra, à esquerda, o sistema mais simples, constando de apenas uma molae de uma alavanca, considerada rígida e de massa desprezível, articulada no ponto O. Naextremidade livre está aplicada a força de excitação F.
Tal associação é muito comum em sistemas mecânicos reais. A suspensão independente de umautomóvel, por exemplo, pode ser modelada por um sistema desse tipo (a menos doamortecedor): na fig. 5, o ponto O seria o chassis, a alavanca OA seria a peça móvel (o braçooscilante) e a força F seria a reação do solo sobre a roda.
Desejamos obter o sistema padrão equivalente, mostrado à direita da fig. 5. Notemos que amola equivalente k é colocada no ponto de aplicação A da força F.
Para a dedução da rigidez equivalente, consideremos a fig. 6, na qual aparece o sistema jádeformado:
Fig. 5 Sistema Mola e alavanca articulada
Fig. 6 Sistema na posição deformada
Elementos de um Sistema Mecânico 6
Tomando momentos em relação ao ponto O: FL = k1xa
Sendo k a rigidez da mola equivalente: F = kx = k AA1
Por outro lado, a semelhança de triângulos permite escrever: La
AAx
1=
Combinando as expressões acima, chegamos a:
k = (a/L)2k1 (8)
A expressão acima pode ser melhor compreendida se levarmos em conta que a é a distância damola dada ao centro de rotação e L é a distância da mola equivalente ao centro de rotação.
No caso geral de um sistema articulado possuir uma barra e n molas ki distantes ai (i = 1, 2, ..., n)do centro de rotação, podemos aplicar o Princípio da Superposição dos Efeitos e obter afórmula geral:
i
n
1i
2i k
La
k ∑=
= (9)
2.5.4 Associação Inclinada (ou Concorrente ou Radial)
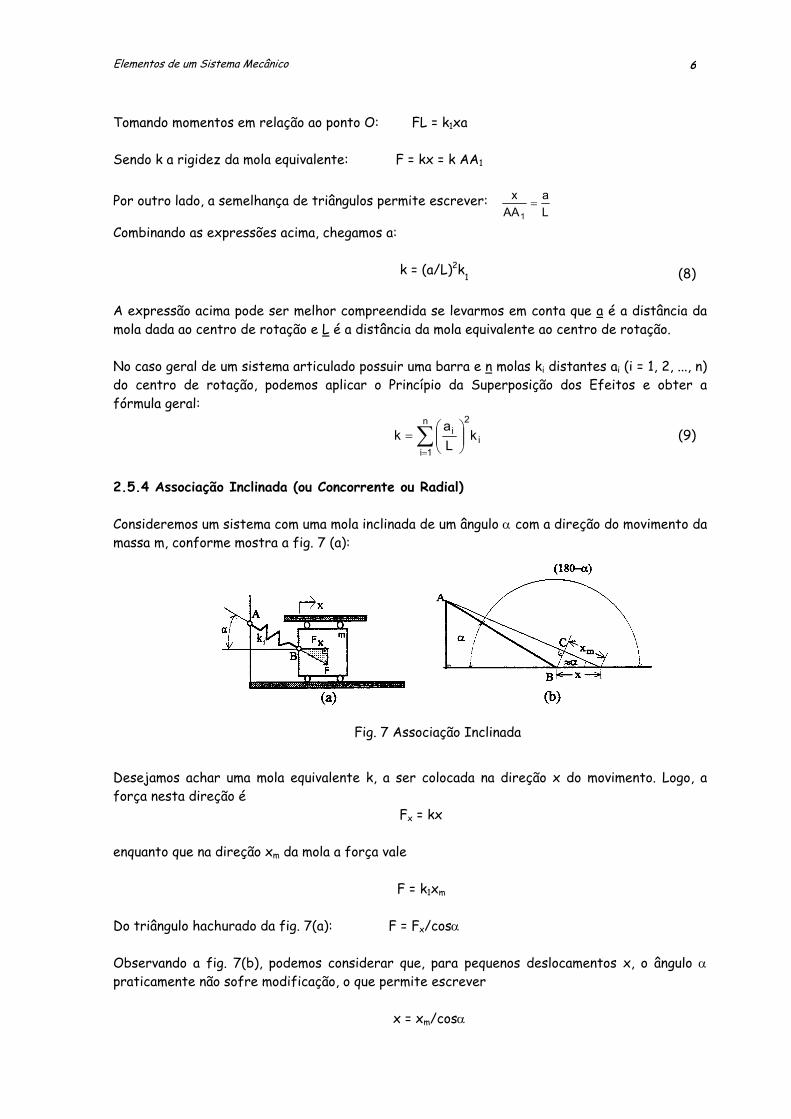
Consideremos um sistema com uma mola inclinada de um ângulo α com a direção do movimento damassa m, conforme mostra a fig. 7 (a):
Desejamos achar uma mola equivalente k, a ser colocada na direção x do movimento. Logo, aforça nesta direção é
Fx = kx
enquanto que na direção xm da mola a força vale
F = k1xm
Do triângulo hachurado da fig. 7(a): F = Fx/cosα
Observando a fig. 7(b), podemos considerar que, para pequenos deslocamentos x, o ângulo αpraticamente não sofre modificação, o que permite escrever
x = xm/cosα
Fig. 7 Associação Inclinada

Elementos de um Sistema Mecânico 7
Combinando as equações acima, podemos concluir que
k = k1 cos2 α
Caso existam n molas inclinadas ki de ângulos αi (i = 1, 2, ..., n) com a horizontal, podemos aplicaro Princípio da Superposição dos Efeitos e obter a fórmula geral:
∑=
α=n
1ii
2icoskk (10)
Observações importantes:
(1) As fórmulas (4) a (10), deduzidas para molas translacionais, podem também ser usadas paramolas torcionais, se utilizarmos a correspondência abaixo.
Mola longitudinal (translação) Mola torcional (rotação)área da seção reta S Momento de inércia polar Ipmassa m Momento de inércia Jdeslocamento retilíneo x Deslocamento angular θforça F Torque Tmódulo de Young E Módulo de elasticidade transversal G
(2) Existem tabelas que fornecem as rigidezes para vários tipos de molas, como ilustra a Tab. 1,abaixo.
Tab. 1 Rigidezes de Molas
Elementos de um Sistema Mecânico 8
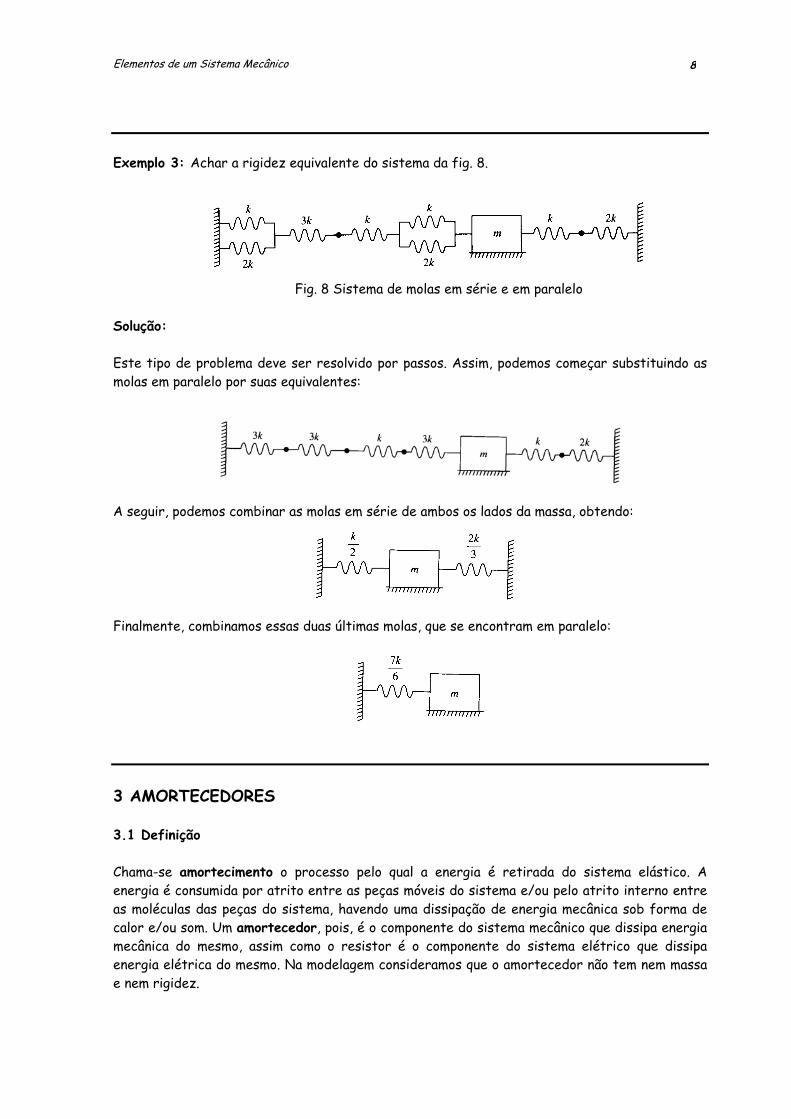
Exemplo 3: Achar a rigidez equivalente do sistema da fig. 8.
Fig. 8 Sistema de molas em série e em paralelo
Solução:
Este tipo de problema deve ser resolvido por passos. Assim, podemos começar substituindo asmolas em paralelo por suas equivalentes:
A seguir, podemos combinar as molas em série de ambos os lados da massa, obtendo:
Finalmente, combinamos essas duas últimas molas, que se encontram em paralelo:
3 AMORTECEDORES
3.1 Definição
Chama-se amortecimento o processo pelo qual a energia é retirada do sistema elástico. Aenergia é consumida por atrito entre as peças móveis do sistema e/ou pelo atrito interno entreas moléculas das peças do sistema, havendo uma dissipação de energia mecânica sob forma decalor e/ou som. Um amortecedor, pois, é o componente do sistema mecânico que dissipa energiamecânica do mesmo, assim como o resistor é o componente do sistema elétrico que dissipaenergia elétrica do mesmo. Na modelagem consideramos que o amortecedor não tem nem massae nem rigidez.
Elementos de um Sistema Mecânico 9
3.2 Tipos de Amortecimento
O amortecimento pode ser classificado em três tipos:
3.2.1 Amortecimento viscoso
É o que mais ocorre na prática da Engenharia. Ele resulta do atrito viscoso, isto é, aquele queacontece entre um sólido (uma peça) e um fluido viscoso (um óleo lubrificante, por exemplo)interposto entre as peças móveis do sistema mecânico. Assim, o atrito que ocorre entre um eixoe o seu mancal de deslizamento, quando há lubrificação, é um atrito viscoso.
A força de atrito viscoso (ou resistência viscosa) é diretamente proporcional à velocidaderelativa entre sólido e fluido. Matematicamente, a resistência viscosa, Fv, é dada por:
xcF.
v = (11)
onde x. é a velocidade relativa entre sólido e fluido, e c é o coeficiente de proporcionalidade,
denominado coeficiente de amortecimento viscoso. A unidade SI de cv é [N.s/m]. No caso demovimento de rotação, o torque de resistência viscoso Tv é dado por
.
v cT θ= (12)
onde θ. é a velocidade angular relativa entre sólido e fluido, e cv é o coeficiente de
amortecimento viscoso. A unidade SI de c, nesse caso, é [N.m.s/rad]. O coeficiente deamortecimento viscoso c é o parâmetro característico de um amortecedor viscoso, do mesmomodo que a rigidez k é o parâmetro característico da mola. Cada amortecedor viscoso tem o seuc característico. Como o coeficiente de amortecimento viscoso está intimamente relacionadocom a viscosidade do fluido, ele sofre a influência da temperatura: aumentos de temperaturaimplicam em queda do coeficiente de amortecimento viscoso. Por esse motivo, verificamos que,no verão, os carros apresentam uma suspensão mais "macia", ao passo que no inverno,principalmente em dias muito frios, a suspensão do carro se apresenta mais "dura". Dadospráticos de c podem ser encontrados em obras especializadas sobre amortecedores.
3.2.2 Amortecimento seco
Também denominado amortecimento constante ou de Coulomb. É o que ocorre quando o atritoé seco, isto é, quando atritam entre si dois sólidos sem lubrificação. Matematicamente, a forçade atrito seco (também denominada força de Coulomb), Fd, é dada por:
Fd = µN (13)
onde µ é o coeficiente de atrito dinâmico entre as superfícies em contato e N é a forçanormal entre as superfícies. Obviamente, µ é adimensional. Conforme podemos verificarfacilmente, a força de atrito é constante, daí o nome de amortecimento constante.
Elementos de um Sistema Mecânico 10
3.2.3 Amortecimento estrutural (ou histerético)
É o que ocorre pelo atrito interno entre moléculas quando o sólido é deformado, fazendo comque a energia seja dissipada pelo material. A medida do amortecimento estrutural é dada pelaamplitude da tensão reinante durante a deformação. Como exemplo de amortecimentoestrutural pode-se citar o que acontece na estrutura de uma prensa mecânica logo após apancada do martelo: parte da energia é consumida pelo atrito intermolecular na estrutura damáquina.
3.2 Cálculo do Coeficiente de Amortecimento Viscoso
O cálculo do coeficiente de amortecimento viscoso pode ser feito experimentalmente outeoricamente. Experimentalmente, podemos aplicar sobre o amortecedor cargas conhecidas emedir os deslocamentos correspondentes, bem como os intervalos de tempo necessários para ascargas percorrerem os ditos deslocamentos. A seguir, aplicamos a eq. (11) ou (12) e tiramos umvalor médio para c, representativo da faixa considerada. Teoricamente, podemos calcular ocoeficiente de amortecimento através da aplicação de conhecimentos de Estática e de Mecânicados Fluidos, conforme ilustra o exemplo a seguir.
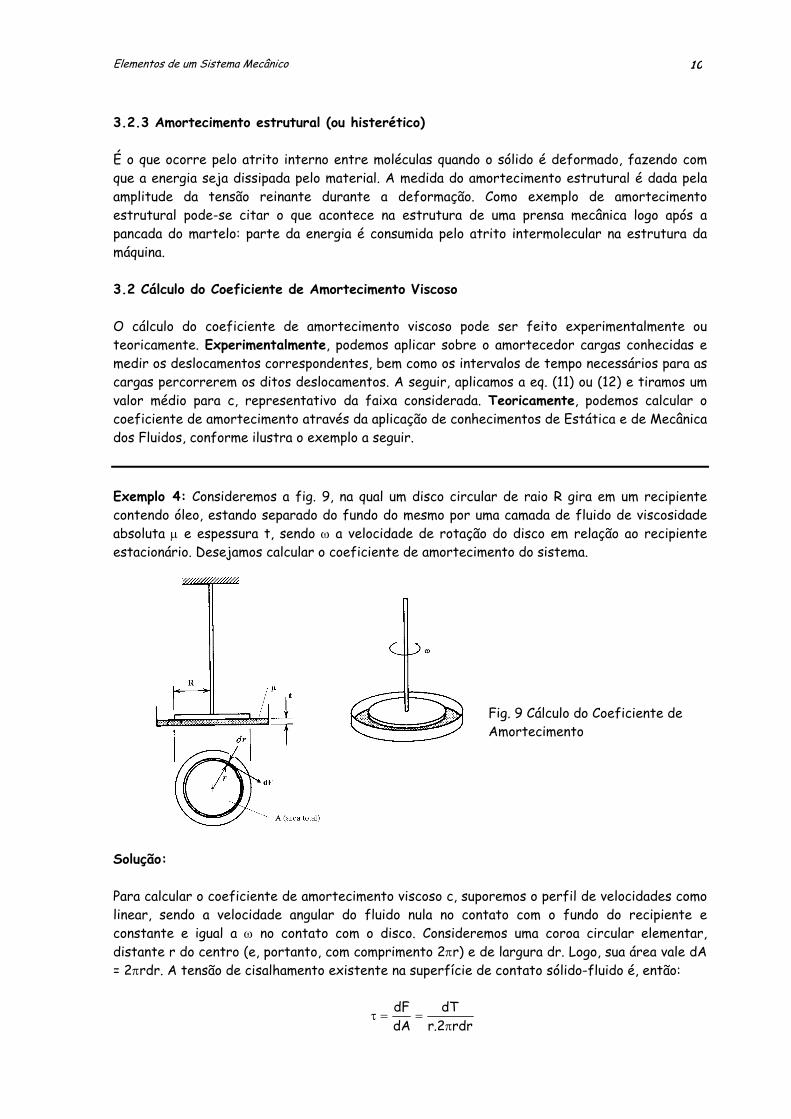
Exemplo 4: Consideremos a fig. 9, na qual um disco circular de raio R gira em um recipientecontendo óleo, estando separado do fundo do mesmo por uma camada de fluido de viscosidadeabsoluta µ e espessura t, sendo ω a velocidade de rotação do disco em relação ao recipienteestacionário. Desejamos calcular o coeficiente de amortecimento do sistema.
Solução:
Para calcular o coeficiente de amortecimento viscoso c, suporemos o perfil de velocidades comolinear, sendo a velocidade angular do fluido nula no contato com o fundo do recipiente econstante e igual a ω no contato com o disco. Consideremos uma coroa circular elementar,distante r do centro (e, portanto, com comprimento 2πr) e de largura dr. Logo, sua área vale dA= 2πrdr. A tensão de cisalhamento existente na superfície de contato sólido-fluido é, então:
rdr2.r
dTdAdF
π==τ
Fig. 9 Cálculo do Coeficiente deAmortecimento
Elementos de um Sistema Mecânico 11
onde dT = rdF é o torque elementar atuando sobre o elemento de área elementar dA. Por outrolado, sabemos da Mecânica dos Fluidos que a tensão de cisalhamento é dada por:
tr
tv
dzdv ω
µ=µ=µ=τ
onde dv/dz é o gradiente de velocidades ao longo da espessura do fluido, considerado constantee igual a v/t, devido à linearidade assumida para o perfil de velocidades. Igualando as duasequações acima:
tr
drr2dT
2ω
µ=π
ou
drt
r2dT3πµω
=
Integrando entre os limites 0 e R, chegamos a
R2tT 4µπω=
Para o caso de amortecedor viscoso torcional, c = T/ω, logo:
R2tc 4µπ=
3.2 Associações de Amortecedores
Do mesmo modo que as molas, também os amortecedores podem estar dispostos em série, emparalelo, articulados ou inclinados. Podemos demonstrar, de maneira semelhante à que foi feitapara as molas, que os coeficientes de amortecimento viscoso equivalentes são dados porfórmulas análogas às das rigidezes equivalentes das molas, isto é:
associação série:
∑=
= n
1i ic1
1c (14)
associação paralela: ∑=
=n
1iicc (15)
associação articulada: cLa
c i
n
1i
2i∑
=
= (16)
associação inclinada: ∑=
α=n
1ii
2icoscc (17)
Elementos de um Sistema Mecânico 12
4 MASSAS E INÉRCIAS
4.1 Introdução
O terceiro e último componente de um sistema elástico é a massa (ou a inércia dessa massa, nocaso de movimento torcional). No nosso sistema padrão a massa (ou a inércia) é consideradacomo um corpo rígido, podendo ganhar ou perder energia cinética conforme sua velocidadeaumente ou diminua. Os problemas que normalmente surgem são:
(1) existem várias massas no sistema e há necessidade de se encontrar uma massa equivalente,de modo a se obter o sistema padrão, com apenas uma massa;
(2) existem vários eixos ligados entre si por engrenagens, correias ou correntes, etc., e hánecessidade de reduzir o sistema original a um sistema padrão, constando de apenas um eixode rigidez, amortecimento e inércia equivalente, isto é, há necessidade de transferirrigidezes, amortecimentos e inércias de um eixo para outro;
Para resolver tais problemas, devemos levar em conta que a massa ou inércia equivalente deverádesenvolver a mesma energia cinética do sistema original, ou, em outras palavras, vamos usar oPrincípio da Conservação da Energia.
A energia cinética de um sistema massa-mola translacional é dada pela expressão
2.
xm21T = (18)
onde m é a massa, em kg, e .x é a velocidade de translação da massa em m/s. No caso de um
sistema torcional, a energia cinética é dada por
2.
J21T θ= (19)
onde J é o momento de inércia da massa, em kg.m2 e .θ é a velocidade angular da massa, em
rad/s.
A seguir, serão estudados os dois problemas citados.
4.2 Equivalência de Massas
Cada caso deve ser tratado separadamente, porém sempre a partir da aplicação do Princípio daConservação da Energia. A destreza em simplificar sistemas complexos dependerá da resoluçãode um número razoável de exercícios. O método será ilustrado através de exemplos.
Exemplo 5 - Em muitos casos, a massa da mola é desprezível na presença da massa do sistema.Entretanto, em algumas situações, tal fato não é verdadeiro, devendo-se, então, calcular amassa equivalente à massa da mola que deve ser acrescentada à massa principal do sistema.

Elementos de um Sistema Mecânico 13
Seja determinar a massa equivalente à massa da mola a ser adicionada à massa m do sistema dafig. 10:
Consideremos um elemento de mola dms, de espessura dy e distante y da extremidade fixa damola. Então, a energia cinética desse elemento de mola será dada por
2.
s ydm21dT =
Considerando a velocidade do elemento de massa, .y , variando linearmente com y, então
..x
Lyy =
onde L é o comprimento instantâneo da mola. Levando na expressão da energia cinética eintegrando, obtemos
2.
s x3
m21T =
ou seja, a mola colabora com 1/3 da sua massa na formação da massa efetiva do sistema.
Exemplo 6 - Seja reduzir o mecanismo de comando de válvula de um motor de combustãointerna, ilustrado na fig. 11, a um sistema simples, constando apenas de uma massa, isto é, acharo valor da massa mA que, colocada no ponto A, represente todas as massas e inércias do sistema.
A energia cinética do sistema é dada pela expressão seguinte, na qual também está consideradaa massa da mola:
2.2s2
v2
.s2
.
v
2.)b
3m
bm(J21)(b
3m
21)(bm
21J
21T θ++=θ+θ+θ=
Fig. 10
Fig. 11
Elementos de um Sistema Mecânico 14
onde temos, em seqüência, a energias cinéticas de rotação do balancim, de translação da massada válvula e de translação da massa da mola. Portanto, a massa equivalente mA a ser colocada no
ponto A, considerando que ..
ax θ= , vale
2
2s2v
A a
b3
mbmJm
++=
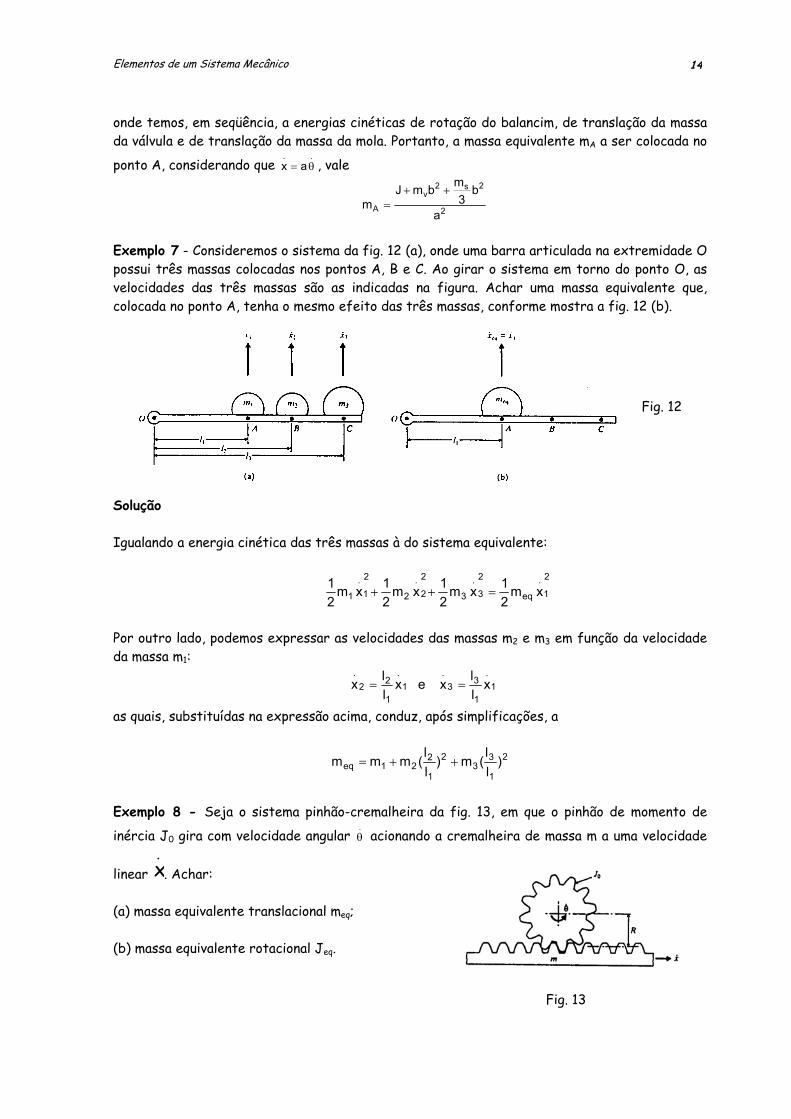
Exemplo 7 - Consideremos o sistema da fig. 12 (a), onde uma barra articulada na extremidade Opossui três massas colocadas nos pontos A, B e C. Ao girar o sistema em torno do ponto O, asvelocidades das três massas são as indicadas na figura. Achar uma massa equivalente que,colocada no ponto A, tenha o mesmo efeito das três massas, conforme mostra a fig. 12 (b).
Solução
Igualando a energia cinética das três massas à do sistema equivalente:
2
1.
eq
2
3.
3
2
2.
2
2
1.
1 xm21xm
21xm
21xm
21
=++
Por outro lado, podemos expressar as velocidades das massas m2 e m3 em função da velocidadeda massa m1:
1.
1
33
.1
.
1
22.
xllx e x
llx ==
as quais, substituídas na expressão acima, conduz, após simplificações, a
2
1
33
2
1
221eq )
ll(m)
ll(mmm ++=
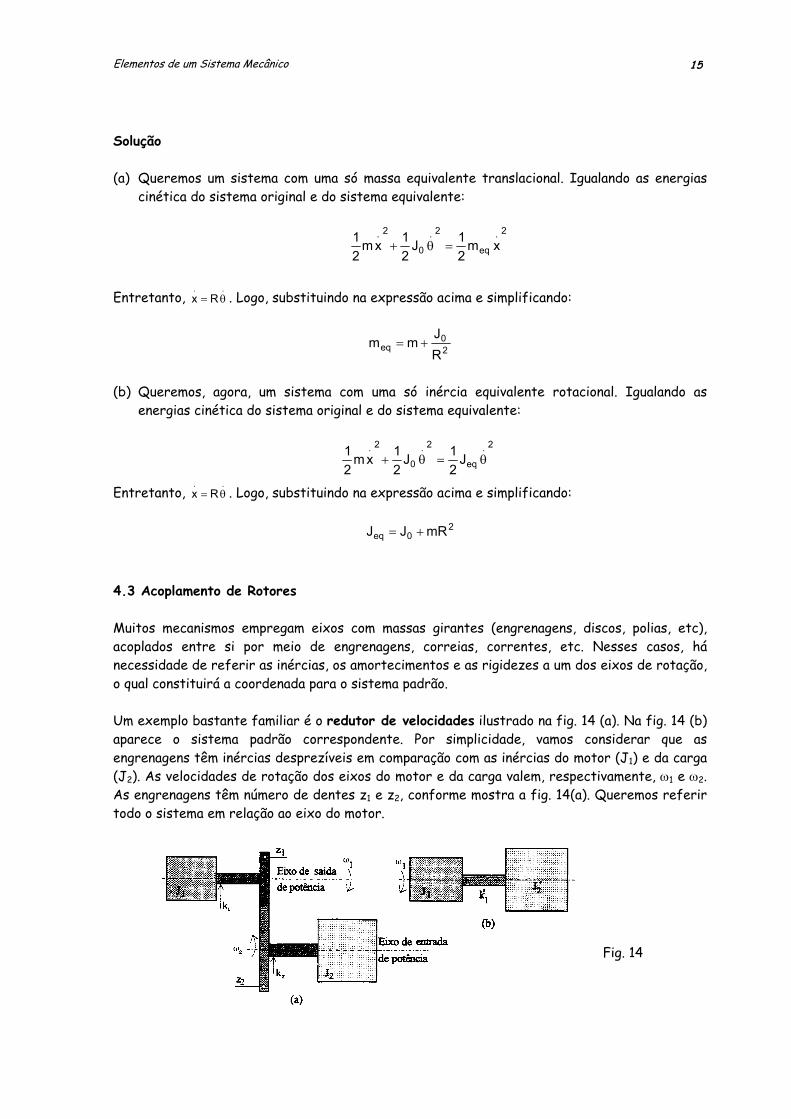
Exemplo 8 - Seja o sistema pinhão-cremalheira da fig. 13, em que o pinhão de momento de
inércia J0 gira com velocidade angular .θ acionando a cremalheira de massa m a uma velocidade
linear .x. Achar:
(a) massa equivalente translacional meq;
(b) massa equivalente rotacional Jeq.
Fig. 12
Fig. 13
Elementos de um Sistema Mecânico 15
Solução
(a) Queremos um sistema com uma só massa equivalente translacional. Igualando as energiascinética do sistema original e do sistema equivalente:
2.
eq
2.
0
2.xm
21J
21xm
21
=θ+
Entretanto, ..
Rx θ= . Logo, substituindo na expressão acima e simplificando:
20
eq RJmm +=
(b) Queremos, agora, um sistema com uma só inércia equivalente rotacional. Igualando asenergias cinética do sistema original e do sistema equivalente:
2.
eq
2.
0
2.J
21J
21xm
21
θ=θ+
Entretanto, ..
Rx θ= . Logo, substituindo na expressão acima e simplificando:
20eq mRJJ +=
4.3 Acoplamento de Rotores
Muitos mecanismos empregam eixos com massas girantes (engrenagens, discos, polias, etc),acoplados entre si por meio de engrenagens, correias, correntes, etc. Nesses casos, hánecessidade de referir as inércias, os amortecimentos e as rigidezes a um dos eixos de rotação,o qual constituirá a coordenada para o sistema padrão.
Um exemplo bastante familiar é o redutor de velocidades ilustrado na fig. 14 (a). Na fig. 14 (b)aparece o sistema padrão correspondente. Por simplicidade, vamos considerar que asengrenagens têm inércias desprezíveis em comparação com as inércias do motor (J1) e da carga(J2). As velocidades de rotação dos eixos do motor e da carga valem, respectivamente, ω1 e ω2.As engrenagens têm número de dentes z1 e z2, conforme mostra a fig. 14(a). Queremos referirtodo o sistema em relação ao eixo do motor.
Fig. 14
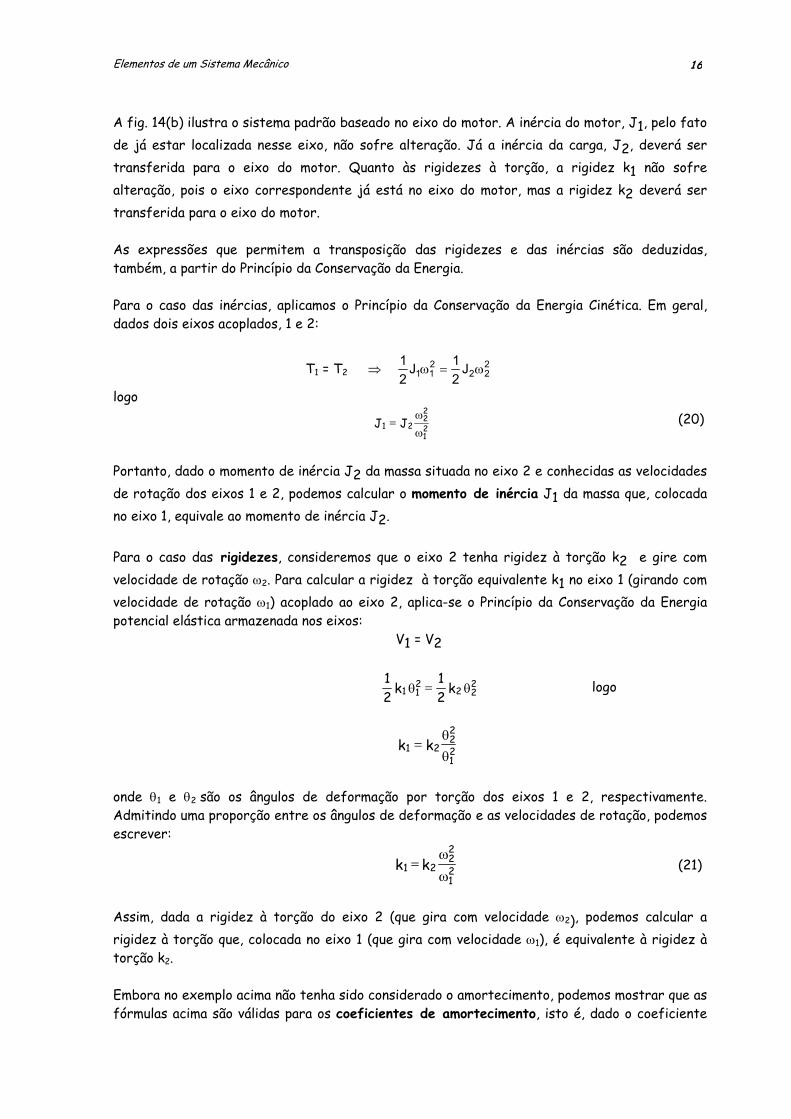
Elementos de um Sistema Mecânico 16
A fig. 14(b) ilustra o sistema padrão baseado no eixo do motor. A inércia do motor, J1, pelo fatode já estar localizada nesse eixo, não sofre alteração. Já a inércia da carga, J2, deverá sertransferida para o eixo do motor. Quanto às rigidezes à torção, a rigidez k1 não sofrealteração, pois o eixo correspondente já está no eixo do motor, mas a rigidez k2 deverá sertransferida para o eixo do motor.
As expressões que permitem a transposição das rigidezes e das inércias são deduzidas,também, a partir do Princípio da Conservação da Energia.
Para o caso das inércias, aplicamos o Princípio da Conservação da Energia Cinética. Em geral,dados dois eixos acoplados, 1 e 2:
T1 = T2 ⇒ 222
211 J
21J
21
ω=ω
logo
ω
ω= 2
1
22
21 JJ (20)
Portanto, dado o momento de inércia J2 da massa situada no eixo 2 e conhecidas as velocidadesde rotação dos eixos 1 e 2, podemos calcular o momento de inércia J1 da massa que, colocadano eixo 1, equivale ao momento de inércia J2.
Para o caso das rigidezes, consideremos que o eixo 2 tenha rigidez à torção k2 e gire comvelocidade de rotação ω2. Para calcular a rigidez à torção equivalente k1 no eixo 1 (girando comvelocidade de rotação ω1) acoplado ao eixo 2, aplica-se o Princípio da Conservação da Energiapotencial elástica armazenada nos eixos:
V1 = V2
θ=θ 222
211 k2
1k2
1 logo
θθ
= 21
22
21 kk
onde θ1 e θ2 são os ângulos de deformação por torção dos eixos 1 e 2, respectivamente.Admitindo uma proporção entre os ângulos de deformação e as velocidades de rotação, podemosescrever:
ω
ω= 2
1
22
21 kk (21)
Assim, dada a rigidez à torção do eixo 2 (que gira com velocidade ω2), podemos calcular arigidez à torção que, colocada no eixo 1 (que gira com velocidade ω1), é equivalente à rigidez àtorção k2.
Embora no exemplo acima não tenha sido considerado o amortecimento, podemos mostrar que asfórmulas acima são válidas para os coeficientes de amortecimento, isto é, dado o coeficiente
Elementos de um Sistema Mecânico 17
de amortecimento do eixo 2 (que gira com velocidade ω2), pode-se calcular o coeficiente deamortecimento que, colocada no eixo 1 (que gira com velocidade ω1), é equivalente ao coeficientede amortecimento c2:
ωω= 2
1
22
21 cc (22)
EXERCÍCIOS
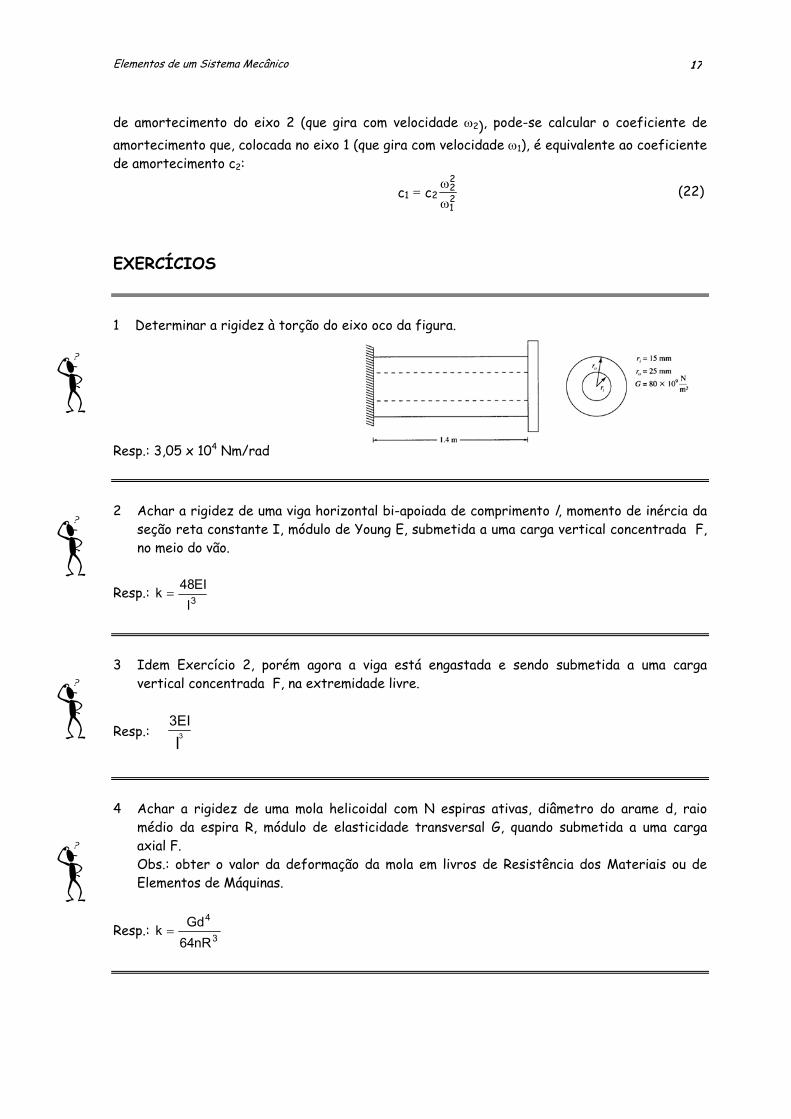
1 Determinar a rigidez à torção do eixo oco da figura.
Resp.: 3,05 x 104 Nm/rad
2 Achar a rigidez de uma viga horizseção reta constante I, módulo deno meio do vão.
Resp.: 3lEI48k =
3 Idem Exercício 2, porém agora vertical concentrada F, na extrem
Resp.: l3
3EI
4 Achar a rigidez de uma mola helmédio da espira R, módulo de elaaxial F.Obs.: obter o valor da deformaçãElementos de Máquinas.
Resp.: 3
4
nR64Gdk =
ontal bi-apoiada de comprimento l, momento de inércia da Young E, submetida a uma carga vertical concentrada F,
a viga está engastada e sendo submetida a uma cargaidade livre.
icoidal com N espiras ativas, diâmetro do arame d, raiosticidade transversal G, quando submetida a uma carga
o da mola em livros de Resistência dos Materiais ou de
Elementos de um Sistema Mecânico 18
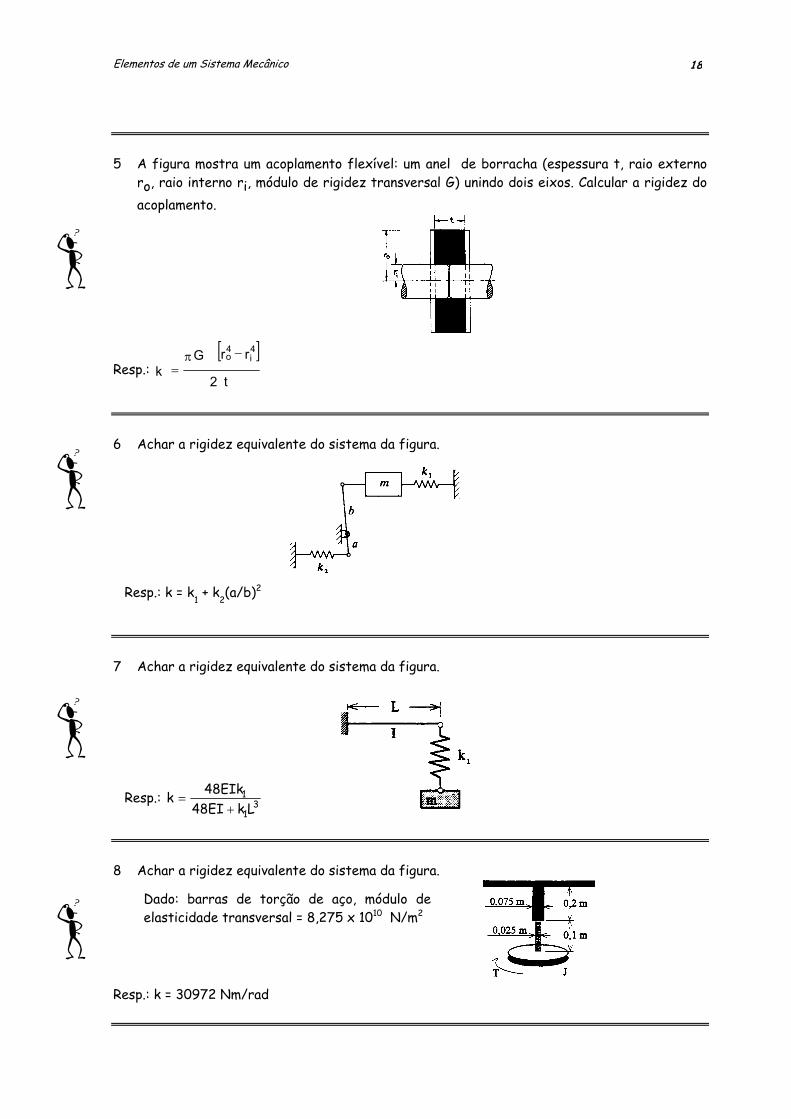
5 A figura mostra um acoplamento flexível: um anel de borracha (espessura t, raio externoro, raio interno ri, módulo de rigidez transversal G) unindo dois eixos. Calcular a rigidez doacoplamento.
Resp.: [ ]t2
rrGk
4i
4o −π
=
6 Achar a rigidez equivalente do sistema da figura.
7 Achar a rigidez equivalente do sistema da figura.
8
R
Resp.: k = k1 + k2(a/b)2
148EIk
Achar a rigidez equivalente do sistema da figura.
es
Resp.: 31Lk48EI
k+
=
Dado: barras de torção de aço, módulo deelasticidade transversal = 8,275 x 1010 N/m2
p.: k = 30972 Nm/rad
Elementos de um Sistema Mecânico 19
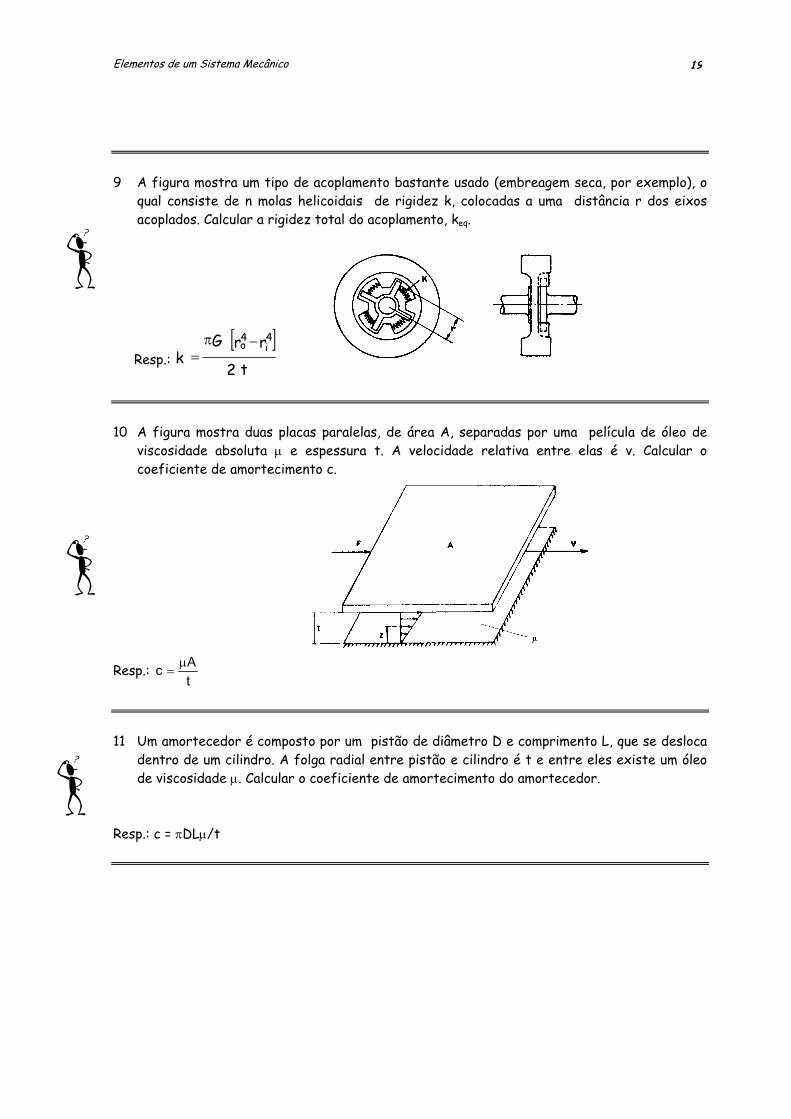
9 A figura mostra um tipo de acoplamento bastante usado (embreagem seca, por exemplo), oqual consiste de n molas helicoidais de rigidez k, colocadas a uma distância r dos eixosacoplados. Calcular a rigidez total do acoplamento, keq.
10 A figura mostra duas placas paralelas, de área A, separadas por uma película de óleo deviscosidade absoluta µ e espessura t. A velocidade relativa entre elas é v. Calcular ocoeficiente de amortecimento c.
Resp.:
tAc µ
=
11 Um amortecedor é composto por um pistão de diâmetro D e comprimento L, que se deslocadentro de um cilindro. A folga radial entre pistão e cilindro é t e entre eles existe um óleode viscosidade µ. Calcular o coeficiente de amortecimento do amortecedor.
Resp.: c = πDLµ/t
Resp.: [ ]
t2
rrGk
4i
4o −π
=
Elementos de um Sistema Mecânico 20
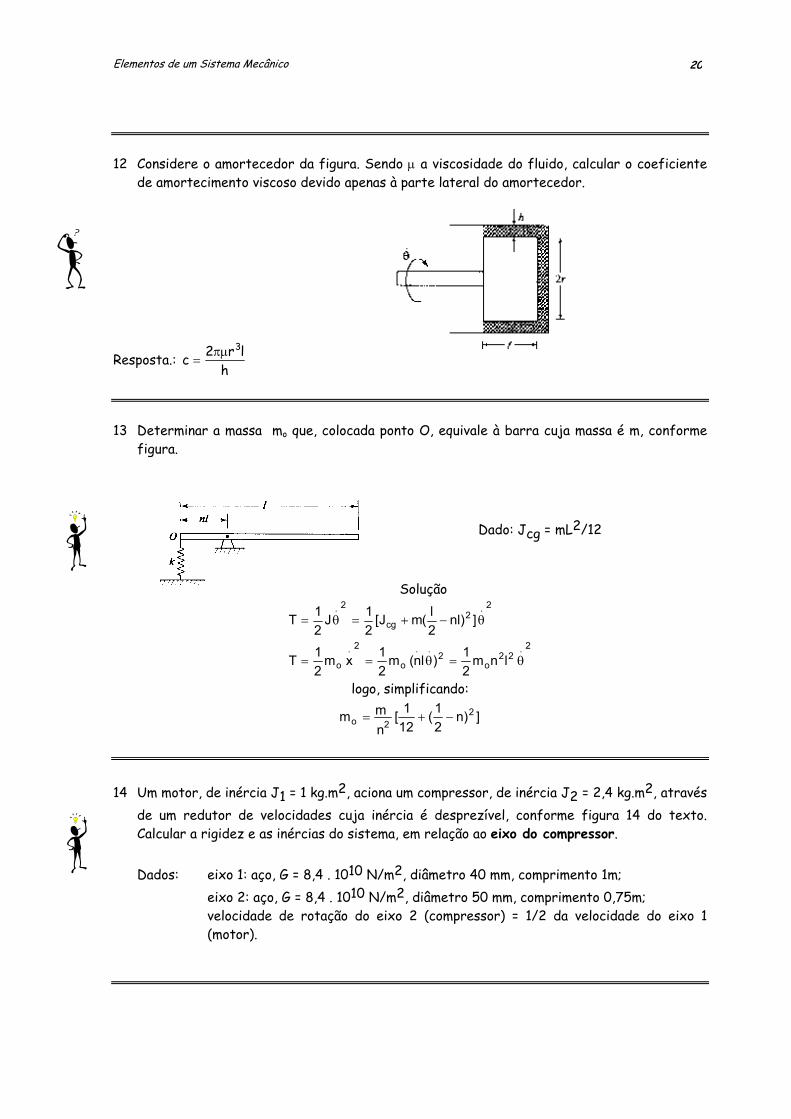
12 Considere o amortecedor da figura. Sendo µ a viscosidade do fluido, calcular o coeficientede amortecimento viscoso devido apenas à parte lateral do amortecedor.
Resposta.: h
lr2c3πµ
=
13 Determinar a massa mo que, colocada ponto O, equivale à barra cuja massa é m, conformefigura.
Solução
2..
o
2.
o
2cg
2.
21)nl(m
21xm
21T
)nl2l(mJ[
21J
21T
=θ==
−+=θ=
logo, simplificando:
)n21(
121[
nmm 2
2o −+=
14 Um motor, de inércia J1 = 1 kg.m2, aciona um compressde um redutor de velocidades cuja inércia é desprCalcular a rigidez e as inércias do sistema, em relação
Dados: eixo 1: aço, G = 8,4 . 1010 N/m2, diâmetro eixo 2: aço, G = 8,4 . 1010 N/m2, diâmetro velocidade de rotação do eixo 2 (compre(motor).
Dado: J = mL2/12
2.22
o
2.
lnm
]
θ
θ
]
or, de inércia J2 = 2,4 kg.m2, atravésezível, conforme figura 14 do texto.ao eixo do compressor.
40 mm, comprimento 1m;50 mm, comprimento 0,75m;ssor) = 1/2 da velocidade do eixo 1
cg
Elementos de um Sistema Mecânico 21
Solução
22
1
12
2
11
'1
22
2
1
12
2
112eq2
410
2
410
1
kg.m 4)2/
(x1)(JJ
2) eixo no está (já kg.m 4,2J
Nm/rad 153200)2/
( x 2111068720)(KKK
Nm/rad 6872075,0
32050,0x10x4,8
K
Nm/rad 211101
32040,0x10x4,8
K
=ωω
=ωω
=
=
=ωω
+=ωω
+=
=
π
=
=
π
=
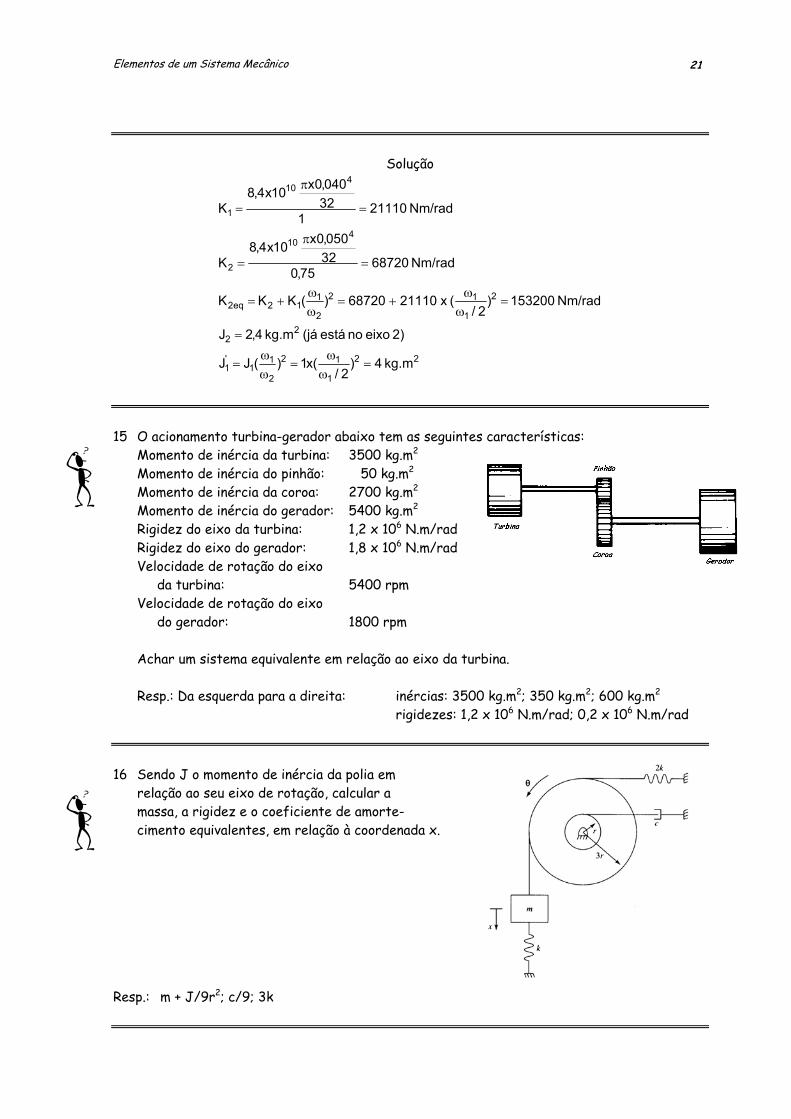
15 O acionamento turbina-gerador abaixo tem as seguintes características:Momento de inércia da turbina: 3500 kg.m2
Momento de inércia do pinhão: 50 kg.m2
Momento de inércia da coroa: 2700 kg.m2
Momento de inércia do gerador: 5400 kg.m2
Rigidez do eixo da turbina: 1,2 x 106 N.m/radRigidez do eixo do gerador: 1,8 x 106 N.m/radVelocidade de rotação do eixo da turbina: 5400 rpmVelocidade de rotação do eixo do gerador: 1800 rpm
Achar um sistema equivalente em relação ao eixo da
Resp.: Da esquerda para a direita: inércias: 35rigidezes:
16 Sendo J o momento de inércia da polia em relação ao seu eixo de rotação, calcular a massa, a rigidez e o coeficiente de amorte- cimento equivalentes, em relação à coordenada x.
Resp.: m + J/9r2; c/9; 3k
turbina.
00 kg.m2; 350 kg.m2; 600 kg.m2
1,2 x 106 N.m/rad; 0,2 x 106 N.m/rad

Elementos de um Sistema Mecânico 22
17 Com relação ao exercício 16, calcular a inércia, a rigidez e o coeficiente de amortecimentoequivalentes, em relação à coordenada θ.
Resp.: I + 9mr2; cr2; 27kr2