1 the e ects of forces and torques on the motion of rigid...
TRANSCRIPT

PS113 Chapter 9
Rotational Dynamics
1 The effects of forces and torques on the motion of rigid
objects
• The mass of most rigid objects is spread out and not concentrated ata single point. There are three kinds of motion a particle can have asit moves through space:
1. Pure translation (no rotation)
2. Curvilinear motion
3. Pure rotation (no translation)
• Today, we’re going to introduce the new dynamical quantity calledtorque. Before we do this, we need to introduce two new concepts:
1. The line of action is an extended line drawn colinear with theforce.
2. The lever arm is the distance ` of closes approach between theline of action and the axis of the rotation, measured on a line thatis perpendicular to both.
• The torque is represented by the symbol τ (Greek letter tau) whosemagnitude is:
Torque = (Magnitude of the force)× (Lever arm)
τ = F` (1)
• Example: Pushing on a door
1

Problem 3: You are installing a new spark plug in your car, and the manualspecifies that it be tightened to a torque that has a magnitudeof 45 N·m. Using the data in the drawing, determine the mag-nitude F of the force that you must exert on the wrench. ` =0.28 m (sin 50o) Answer: 210 N
2
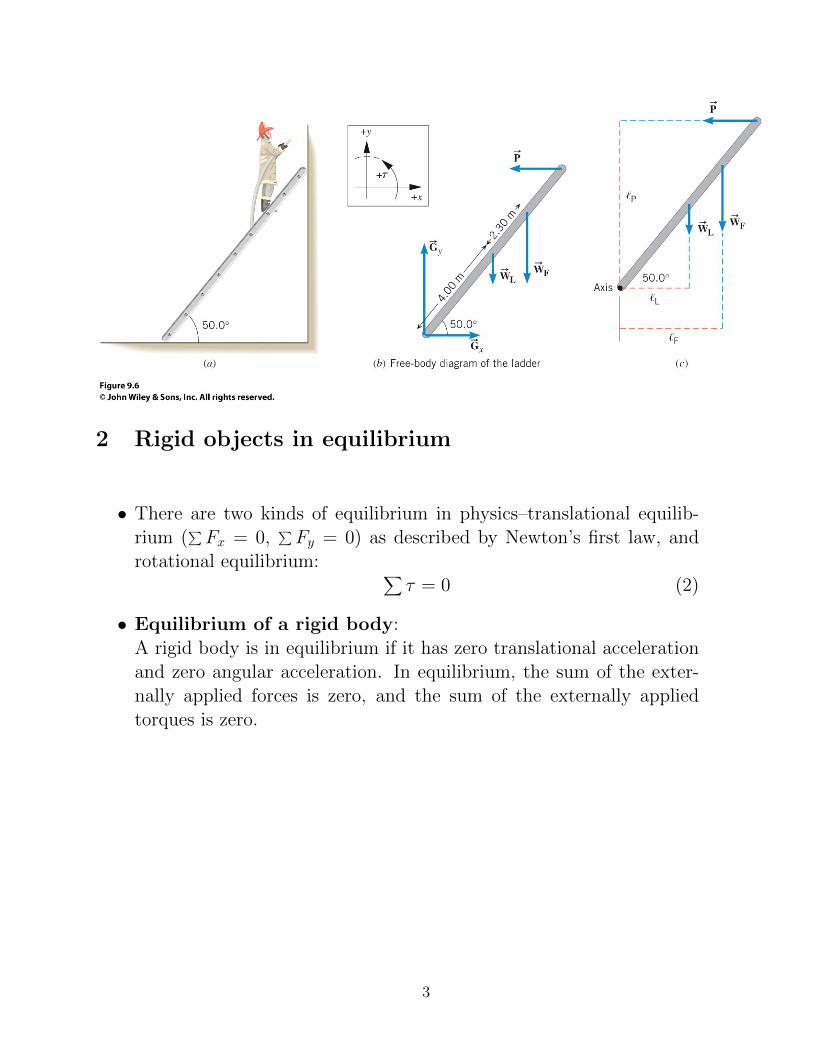
2 Rigid objects in equilibrium
• There are two kinds of equilibrium in physics–translational equilib-rium (
∑Fx = 0,
∑Fy = 0) as described by Newton’s first law, and
rotational equilibrium: ∑τ = 0 (2)
• Equilibrium of a rigid body:A rigid body is in equilibrium if it has zero translational accelerationand zero angular acceleration. In equilibrium, the sum of the exter-nally applied forces is zero, and the sum of the externally appliedtorques is zero.
3

3 Center of Gravity
• It is often important to know the torque produced by the weight of anextended body. In the previous example, it was necessary to determinethe torques caused by the weight of the ladder and the man on theladder. In this case, the weight is considered to act at a definite pointfor the purpose of calculating the torque. This point is called thecenter of gravity
• Definition of the center of gravity: The center of gravity of arigid body is the point at which its weight can be considered to actwhen calculating the torque due to the weight.
W1 x1 +W2 x2 + · · · = (W1 +W2 + · · ·)xcg
xcg =W1 x1 +W2 x2 + · · ·W1 +W2 + · · ·
(3)
• Example: A 1-kg meter stick has a 200 g mass placed at 30 cm and a250 g mass placed 90 cm. If the c.g. of the meter stick is lo-cated at 50 cm and the mass of the meter stick is 50 g, whereis the center of gravity of the combined system located?
Problem 12: The drawing shows a person whose weight is W = 584 N doingpush-ups. Find the normal force exerted by the floor on each handand each foot, assuming that the person holds this position. feet→ c.g. = 0.840 m, and c.g. → hands = 0.410 m
4

5

4 Newton’s second law for rotational motion about a fixed
axis
• We will now explore how torque is used in Newton’s 2nd law of mo-tion. More specifically, we will look at the torque applied to a rigidbody rotating about a fixed axis. Recall that every point in a rigidbody shares the same angular velocity (ω = v/r) and angular accel-eration (α = a
T/r)
• The torque applied to one point on a rigid body is:
τ1 = r1F1 sin θ = r1FT
where F1 sin θ is the force (FT) perpendicular to r1, thus making r1
the lever arm. Continuing on, we find that:
τ1 = r1FT= r1(maT
) = r1m (r1 α) = (m1r21)α
Since a rigid body is made up of many point-like particles, we can imagine thateach particle experience a local torque to some external force (e.g., gravity), andwe can write:
τ1 + τ2 + τ3 + · · · = (m1r21)α + (m2r
22)α + (m3r
23)α + · · ·
τ1 + τ2 + τ3 + · · · = (m1r21 +m2r
22 +m3r
23 + · · ·)α
6

Finally, we can write that:
τ1 + τ2 + τ3 + · · · =∑τi =
N∑i=1
(mir2i )α = Iα (4)
or ∑τext = Iα (5)
Problem 34: A ceiling fan is turned on and a net torque of 1.8 N·m is appliedto the blades. The blades have a total moment of inertia of0.22 kg·m2. What is the angular acceleration of the blades?
5 Rotational work and energy
• We saw before that the work performed to cause translational motionwas W = (F cos θ) · s. In many cases, the force was in the directionof motion, so this equation reduced to W = F · s. In rotationaldynamics this equation becomes:
W = τ · θ
7

where τ is the external torque applied to the system, and θ is the angulardisplacement.
• We can now express the Work-Energy Theorem for rotational motionas:
Wrot = τ · θ = ∆KErot
where ∆KErot is the rotational kinetic energy created by the torque.
• The total work done by forces that cause translation as well as rota-tion on a rigid body is:
Wtotal = Wtrans +Wrot = ∆KEtrans + ∆KErot
Wtotal =
(1
2mv2 − 1
2mv2o
)+
(1
2Iω2 − 1
2Iω2
)(6)
Demonstration:Suppose a hoop and disk, both of mass M and radius R, are released at restfrom the top of an incline. Which one will arrive at the bottom of the inclinefirst?
vhoop =√gh vdisk =
√√√√4
3gh
What makes the difference in velocity? It’s how the mass is distributed?Notice that the velocities do not depend on the mass or the radius–but onlyon how the mass is distributed.
8

Problem 48: Calculate the kinetic energy that the earth has because of(a) its rotation about its own axis and (b) its motion aroundthe sun. Assume that the earth is a uniform sphere andthat its path around the sun is circular. For comparison, thetotal energy used in the United States in one year is about9.3× 1019 J.
9

6 Angular Momentum
• Just as linear momentum is conserved when the∑Fext = 0, so is
angular momentum conserved when the∑τext = 0.
• We define the angular momentum L of a body rotating about a fixedaxis as the product of the body’s moment of inertia I and its angularvelocity ω with respect to that axis:
L = Iω (7)
where ω is expressed in [rad/s] and the SI Unit of angular mo-mentum is kg ·m2/s
• For a satellite in an elliptical orbit about the earth, the point ofclosest approach is called the perigee while the furthest point is calledthe apogee. Their respective distances from the earth are labeled (r
P)
and (rA).
• Requiring conservation of angular momentum at the perigee andapogee, we can write the following:
LP
= LA
⇒ IPω
P= I
Aω
A⇒ mr2
P
vP
rP
= mr2A
vA
rA
Finally, we cancel some terms in the above equation and write therelationship between the perihelion (r
P) and the aphelion (r
A) as:
rPvP
= rAvA
Notice that the mass of the satellite is of no consequence. Also noticethat the earth and the satellite are considered to be a closed systemwhere there are no external torques acting on the system, therefore,we can presume that angular momentum is conserved.
10

Problem 59: Two disks are rotating about the same axis. Disk A has amoment of inertia of 3.4 kg·m2 and an angular velocity of+7.2 rad/s. Disk B is rotating with an angular velocity of-9.8 rad/s. The two disks are then linked together without theaid of any external torques, so that they rotate as a single unitwith an angular velocity of -2.4 rad/s. The axis of rotation forthis unit is the same as that for the separate disks. What isthe moment of inertia of disk B.
11