11-camme
TRANSCRIPT

5/11/2018 11-Camme - slidepdf.com
http://slidepdf.com/reader/full/11-camme 1/12
Capitolo 1
Meccanismi a camma
5/11/2018 11-Camme - slidepdf.com
http://slidepdf.com/reader/full/11-camme 2/12
1.1 Generalita e definizioni
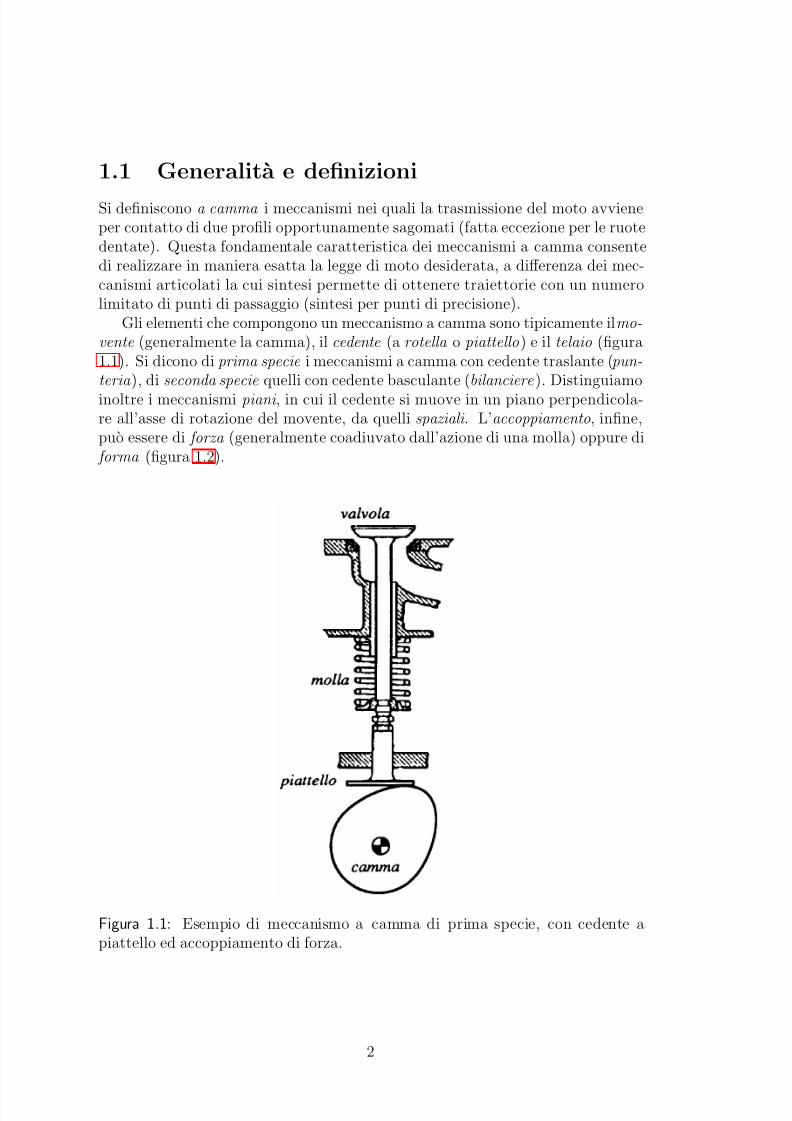
Si definiscono a camma i meccanismi nei quali la trasmissione del moto avvieneper contatto di due profili opportunamente sagomati (fatta eccezione per le ruotedentate). Questa fondamentale caratteristica dei meccanismi a camma consentedi realizzare in maniera esatta la legge di moto desiderata, a differenza dei mec-canismi articolati la cui sintesi permette di ottenere traiettorie con un numerolimitato di punti di passaggio (sintesi per punti di precisione).
Gli elementi che compongono un meccanismo a camma sono tipicamente il mo-
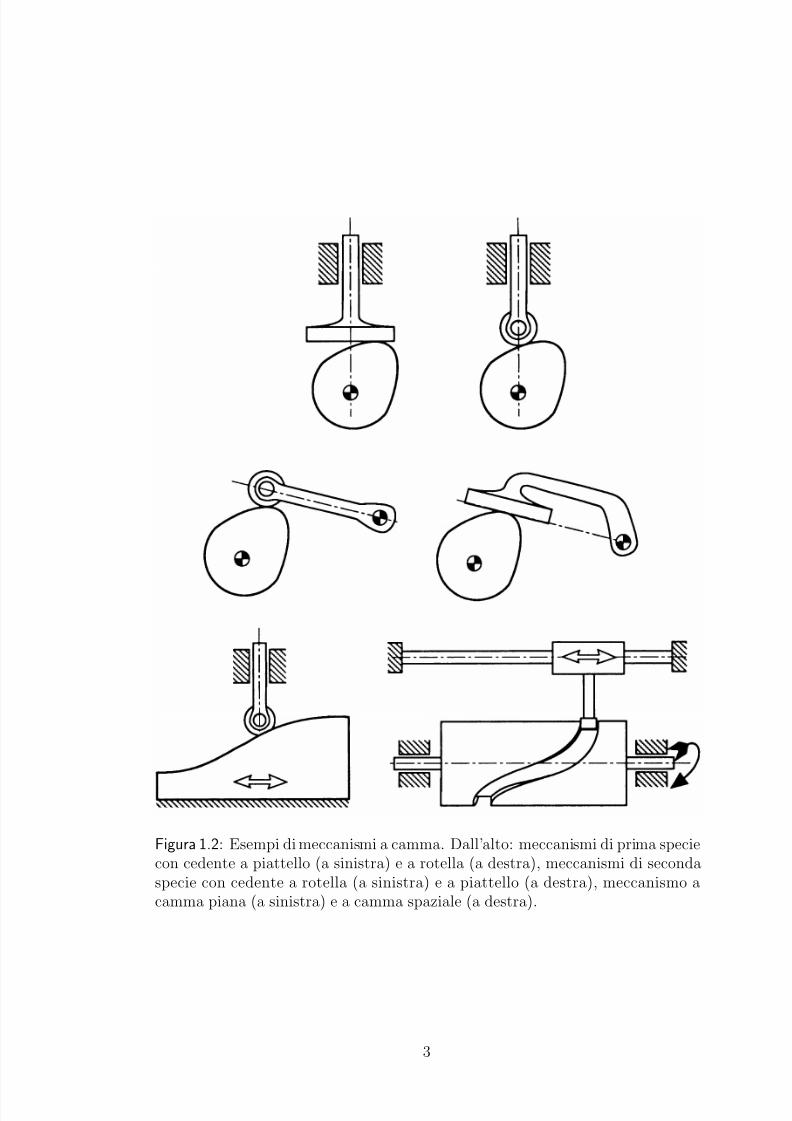
vente (generalmente la camma), il cedente (a rotella o piattello) e il telaio (figura1.1). Si dicono di prima specie i meccanismi a camma con cedente traslante (pun-
teria ), di seconda specie quelli con cedente basculante (bilanciere ). Distinguiamoinoltre i meccanismi piani , in cui il cedente si muove in un piano perpendicola-re all’asse di rotazione del movente, da quelli spaziali . L’accoppiamento, infine,puo essere di forza (generalmente coadiuvato dall’azione di una molla) oppure di
forma (figura 1.2).
Figura 1.1: Esempio di meccanismo a camma di prima specie, con cedente apiattello ed accoppiamento di forza.
2
5/11/2018 11-Camme - slidepdf.com
http://slidepdf.com/reader/full/11-camme 3/12
Figura 1.2: Esempi di meccanismi a camma. Dall’alto: meccanismi di prima speciecon cedente a piattello (a sinistra) e a rotella (a destra), meccanismi di secondaspecie con cedente a rotella (a sinistra) e a piattello (a destra), meccanismo acamma piana (a sinistra) e a camma spaziale (a destra).
3

5/11/2018 11-Camme - slidepdf.com
http://slidepdf.com/reader/full/11-camme 4/12
1.2 Problematiche
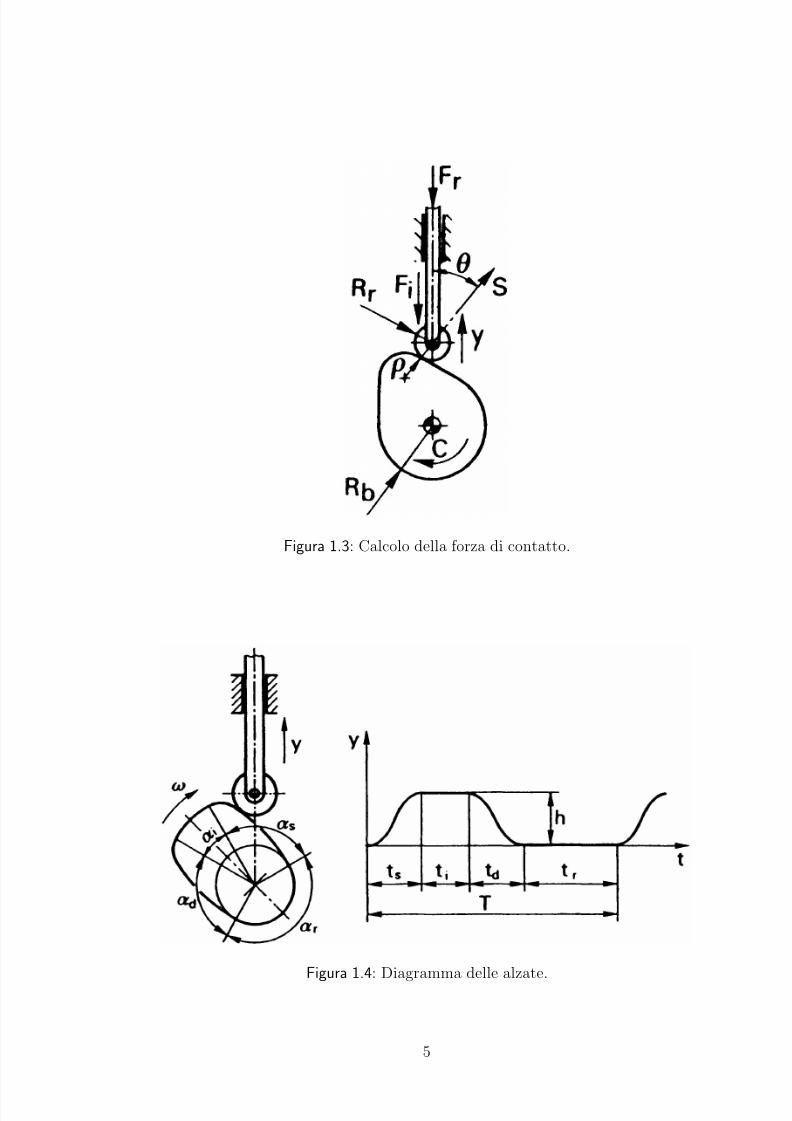
Innanzitutto la forza di contatto S tra il movente ed il cedente deve esseremantenuta piu piccola possibile, in modo da ridurre l’ingombro e l’usura delmeccanismo. Con riferimento alla figura 1.3 possiamo scrivere
S =F r + F i
cos θ
dove F r e la forza resistente che il cedente deve vincere, F i e la forza d’inerziae θ (angolo di pressione) l’angolo formato dalla direzione della forza S (normaleal profilo nel punto di contatto) con la velocita del cedente. Si capisce che F i e θ
devono essere contenuti il piu possibile.
Anche la pressione di contatto p che si sviluppa tra cedente e movente deveessere limitata (per lo meno inferiore alla pressione ammissibile pam del materiale).La formula di Hertz fornisce, nel caso di figura 1.3,
p =
0.175SE
bRr
1 +
Rr
ρ
dove E e il modulo di elasticita del materiale, b lo spessore della camma, ρ ilraggio di curvatura del profilo nel punto di contatto e Rr il raggio della rotella.Chiaramente ρ deve essere il piu grande possibile, compatibilmente con l’esigenza
di contenere le dimensioni della camma. Inoltre, una scelta opportuna dei mate-riali, delle lavorazioni meccaniche e dei trattamenti termici puo contribuire allariduzione del valore di p.
Le forze d’inerzia possono portare, nella fase di ritorno del cedente, al distaccodel cedente dal movente con conseguente generazione di urti. Questo fenomenopuo essere prevenuto mediante la scelta di una legge di moto opportuna e tramitel’utilizzo di una molla che tenga il cedente premuto sul movente. Il sovraccaricodovuto alla presenza della molla comporta pero un aumento della forza di contattoe quindi un aumento delle dimensioni della camma. Le forze d’inerzia, inoltre,possono generare vibrazioni.
La lavorazione delle camme puo avvenire per tracciatura, punto a punto, pertratti elementari, per copiatura o con l’utilizzo di macchine a controllo numerico.
1.3 Sintesi cinematica
La sintesi cinematica di un meccanismo a camma consiste nella determinazionedella tipologia e delle dimensioni del meccanismo che consentono di ottenere unalegge di moto prestabilita per il cedente. La legge di moto viene rappresentatatramite il diagramma delle alzate, generalmente costituito da due fasi di sosta
(separate dall’alzata h), una fase di salita ed una di discesa (figura 1.4). Le fasimaggiormente critiche sono la salita e la discesa, in quanto comportano l’insorgeredi accelerazioni e quindi di forze d’inerzia.
4
5/11/2018 11-Camme - slidepdf.com
http://slidepdf.com/reader/full/11-camme 5/12
Figura 1.3: Calcolo della forza di contatto.
Figura 1.4: Diagramma delle alzate.
5

5/11/2018 11-Camme - slidepdf.com
http://slidepdf.com/reader/full/11-camme 6/12
In figura 1.5a sono rappresentate, a parita di alzata h e tempo di salita ts, tre
fasi di salita distinte, all’apparenza molto simili ma nettamente diverse per quantoriguarda l’andamento delle accelerazioni: la legge di moto numero 1 (detta ad ac-celerazione costante simmetrica) consente di contenere il valore dell’accelerazionemassima, tuttavia le discontinuita del diagramma delle accelerazioni comporte-ranno l’insorgere di vibrazioni. Si capisce come la scelta della legge di moto, noteche siano le specifiche di progetto (alzata e durata delle fasi del moto), costitui-sca un momento fondamentale della sintesi del meccanismo a camma. Particolareattenzione dovra essere dedicata al diagramma delle accelerazioni, specialmentenelle fasi del moto in cui le forze d’inerzia tendono a favorire il distacco del cedentedalla camma.
I criteri comunemente utilizzati per operare la scelta della legge di moto sonola minimizzazione del modulo dell’accelerazione massima (legge ad accelerazionecostante simmetrica, figura 1.5b), la limitazione del modulo dell’accelerazionenegativa massima (legge ad accelerazione costante asimmetrica, figura 1.5c), lalimitazione della velocita massima (legge ad accelerazione costante tagliata, figura1.5d) e la limitazione delle vibrazioni (legge biarmonica, figura 1.5e).
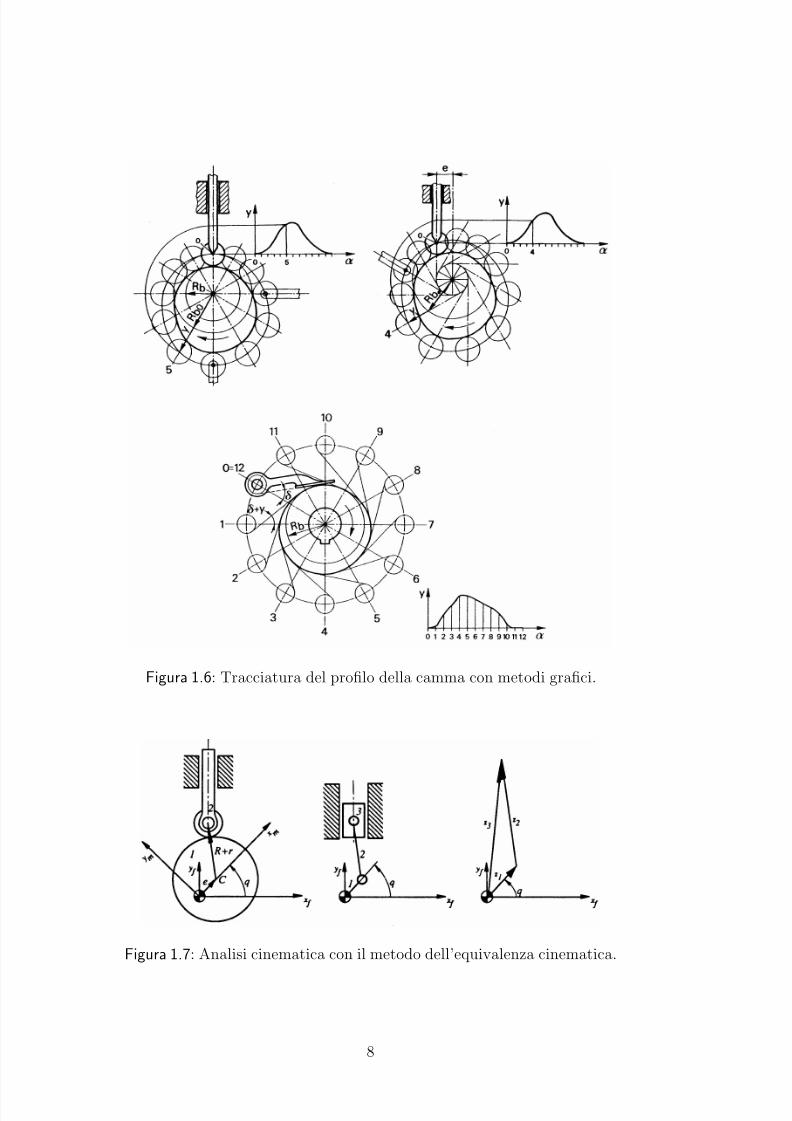
Una volta operata la scelta della legge di moto del cedente, la tracciatura delprofilo della camma si ottiene mediante una inversione cinematica , vale a dire
supponendo che la camma sia ferma e riportando attorno ad essa le successiveposizioni assunte dal cedente durante il moto, secondo le indicazioni fornite daldiagramma delle alzate. Prima di compiere questa operazione e necessario fissareil raggio di base Rb della camma. Il profilo della camma si ottinene dall’inviluppo
delle posizioni del cedente.In figura 1.6 e rappresentata la sintesi grafica di un meccanismo a camma con
punteria a rotella (sia centrato che deviato con eccentricita e) e di un meccanismocon bilanciere a piattello.
6

5/11/2018 11-Camme - slidepdf.com
http://slidepdf.com/reader/full/11-camme 7/12
Figura 1.5: Esempi di diagrammi delle alzate relativi alla fase di salita.
7
5/11/2018 11-Camme - slidepdf.com
http://slidepdf.com/reader/full/11-camme 8/12
Figura 1.6: Tracciatura del profilo della camma con metodi grafici.
Figura 1.7: Analisi cinematica con il metodo dell’equivalenza cinematica.
8

5/11/2018 11-Camme - slidepdf.com
http://slidepdf.com/reader/full/11-camme 9/12
1.4 Analisi cinematica
Lo scopo dell’analisi cinematica di un meccanismo a camma e determinare l’anda-mento del diagramma delle alzate nota che sia la geometria del sistema; a tal finesi utilizza il metodo dell’equivalenza cinematica , che consiste nell’individuare unmeccanismo articolato equivalente al meccanismo a camma, la cui analisi cinema-tica puo essere quindi svolta con le tecniche impiegate nell’analisi dei meccanismiarticolati (poligono di chiusura, gruppi di assur).
Con riferimento alla figura 1.7 (meccanismo a camma circolare ad eccentri-co con punteria a rotella), possiamo notare come la distanza tra il centro dellacamma e quello della rotella rimane costante nel tempo, indipendentemente dalvalore della coordinata libera q; per questo motivo, il meccanismo articolato equi-valente e un semplice meccanismo di spinta rotativo decentrato, le cui equazionidi chiusura sono
e
cos qsin q
+ (R + r)
cos θ2sin θ2
−
x3y3
=
00
(1.1)
dove θ2 e l’angolo formato dal vettore z2 con l’asse xf , x3 e y3 sono le coordi-nate del centro della rotella. Le equazioni 1.1 costituiscono un sistema non linearedi due equazioni nelle incognite θ2 e y3, che andremo a risolvere eliminando lavariabile θ2 per ottenere l’alzata y3 in funzione di q.
Figura 1.8: Meccanismi con bilanciere a rotella e punteria a piattello.
9

5/11/2018 11-Camme - slidepdf.com
http://slidepdf.com/reader/full/11-camme 10/12
Dopo aver riordinato le equazioni 1.1 come segue
(R + r)
cos θ2sin θ2
=
x3y3
− e
cos qsin q
possiamo quadrarle e sommarle, ottenendo la seguente equazione di secondogrado in y3:
(R + r)2 = x23
+ y23
+ e2 − 2ex3 cos q − 2ey3 sin q (1.2)
La prima delle due soluzioni della 1.2 fornisce la seguente espressione di y3 infunzione di q:
y3 (q) = e sin q ± e2 sin2 q − x23 − e2 + (R + r)2 + 2ex3 cos q (1.3)
La velocita geometrica del cedente y′
3(q) = dy3
dqsi ottiene derivando le 1.1
rispetto a q e risolvendo il sistema lineare cosı ottenuto mediante inversione dellamatrice dei rapporti di velocita:
e − sin q
cos q+ (R + r) − sin θ2
cos θ2dθ2
dq
− 0
1dy3
dq
= 0
0
− (R + r)sin θ2 0
(R + r)cos θ2 −1
dθ2dqdy3dq
= −e
− sin q
cos q
dθ2dqdy3dq
= −
e
(R + r)sin θ2
−1 0
− (R + r)cos θ2 − (R + r)sin θ2
− sin q
cos q
In definitiva otteniamo
y′
3 (q) =dy3
dq = esin(θ2 − q)
sin(θ2) (1.4)
L’accelerazione geometrica y′′
3(q) = d2y3
dq2si ricava dalla 1.3 per ulteriore deri-
vazione rispetto a q.
Analogamente al caso appena trattato, il meccanismo di figura 1.8a puo esserestudiato mediante analisi cinematica del quadrilatero articolato equivalente. Perquanto riguarda il meccanismo di figura 1.8b (camma di profilo generico conpunteria a piattello), le equazioni di chiusura del poligono formato dai vettori z1,z2 e z3 si scrivono come segue
ρ (β )
cos(β + q)sin(β + q)
+ a2
10
−
xM
yM
=
00
(1.5)
10

5/11/2018 11-Camme - slidepdf.com
http://slidepdf.com/reader/full/11-camme 11/12
dove a2 e il modulo del vettore z2, xM e yM sono le coordinate del centro
del cerchio di base del piattello. Le equazioni 1.5 costituiscono un sistema nonlineare di due equazioni nelle tre incognite β , a2 e yM , la cui risoluzione in funzionedella variabile yM (alzata del piattello) richiede l’aggiunta di una terza equazione(equazione ausiliaria ) che possiamo scrivere come
q + β + ν (β ) =π
2
dove l’angolo ν (β ) (formato dalla normale al profilo della camma in P conil vettore z1) costituisce un dato di progetto. In questo caso, dunque, l’analisicinematica del meccanismo a camma richiede la risoluzione (per via analitica o
numerica) di un sistema non lineare di tre equazioni in tre incognite.
Bisogna precisare che l’analisi cinematica di un meccanismo a camma vieneimpiegata principalmente per valutare la misura in cui una camma e in grado direalizzare la legge di moto desiderata, quando per ragioni di costo si preferisceapprossimare i risultati della sintesi cinematica utilizzando profili semplificaticostituiti da piu archi di cerchio (camme policentriche).
Figura 1.9: Ulteriori esempi di meccanismi a camma.
11
5/11/2018 11-Camme - slidepdf.com
http://slidepdf.com/reader/full/11-camme 12/12
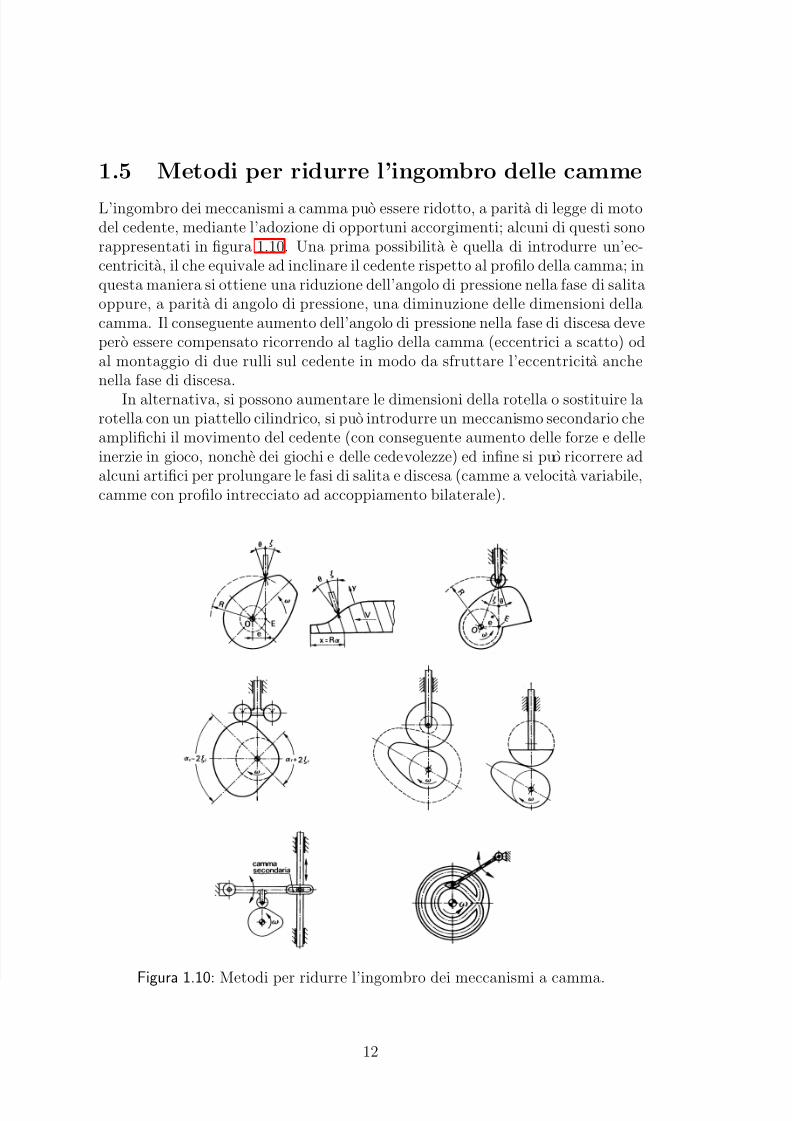
1.5 Metodi per ridurre l’ingombro delle camme
L’ingombro dei meccanismi a camma puo essere ridotto, a parita di legge di motodel cedente, mediante l’adozione di opportuni accorgimenti; alcuni di questi sonorappresentati in figura 1.10. Una prima possibilita e quella di introdurre un’ec-centricita, il che equivale ad inclinare il cedente rispetto al profilo della camma; inquesta maniera si ottiene una riduzione dell’angolo di pressione nella fase di salitaoppure, a parita di angolo di pressione, una diminuzione delle dimensioni dellacamma. Il conseguente aumento dell’angolo di pressione nella fase di discesa devepero essere compensato ricorrendo al taglio della camma (eccentrici a scatto) odal montaggio di due rulli sul cedente in modo da sfruttare l’eccentricita anchenella fase di discesa.
In alternativa, si possono aumentare le dimensioni della rotella o sostituire larotella con un piattello cilindrico, si puo introdurre un meccanismo secondario cheamplifichi il movimento del cedente (con conseguente aumento delle forze e delleinerzie in gioco, nonche dei giochi e delle cedevolezze) ed infine si puo ricorrere adalcuni artifici per prolungare le fasi di salita e discesa (camme a velocit a variabile,camme con profilo intrecciato ad accoppiamento bilaterale).
Figura 1.10: Metodi per ridurre l’ingombro dei meccanismi a camma.
12