14 system hardware sample - autotechinsight
TRANSCRIPT
2013 edition 2 © 2013 IHS
IHS Automotive | The Automotive Electric and Electronic Systems Report
COPYRIGHT NOTICE AND LEGAL DISCLAIMER© 2013 IHS. No portion of this report may be reproduced, reused, or otherwise distributed in any form without prior written consent, with the exception of any internal client distribution as may be permitted in the license agreement between client and IHS. Content reproduced or redistributed with IHS permission must display IHS legal notices and attributions of authorship. The information contained herein is from sources considered reliable but its accuracy and completeness are not warranted, nor are the opinions and analyses which are based upon it, and to the extent permitted by law, IHS shall not be liable for any errors or omissions or any loss, damage or expense incurred by reliance on information or any statement contained herein. For more information, please contact IHS at [email protected], +1 800 IHS CARE (from North American locations), or +44 (0) 1344 328 300 (from outside North America). All products, company names or other marks appearing in this publication are the trademarks and property of IHS or their respective owners.
IHS AutomotiveSupplierBusiness
ContentsIntroduction ..................................................................................................................................................................... 5Demands of the automotive industry ......................................................................................................................... 10
Temperature requirements ......................................................................................................................................... 10Vibration and shock ................................................................................................................................................... 12Failure rates ................................................................................................................................................................ 12
Challenges for the automotive industry..................................................................................................................... 13Bandwidth .................................................................................................................................................................. 13
Standardisation.......................................................................................................................................................... 14Changes in the automotive industry ....................................................................................................................... 14Higher voltage architecture ...................................................................................................................................... 15
System hardware .......................................................................................................................................................... 17Electronic Control Units (ECUs)............................................................................................................................... 17Wiring and harnesses ................................................................................................................................................ 17
Fibre optic cables ....................................................................................................................................................... 18Flat cabling ................................................................................................................................................................. 20Flexible printed circuits ............................................................................................................................................... 20Programmable logic devices ...................................................................................................................................... 21
Sensors .......................................................................................................................................................................... 23Resistive sensors ....................................................................................................................................................... 24Voltage generating sensors ........................................................................................................................................ 25Switch type sensors ................................................................................................................................................... 26Optical torque and position sensors ........................................................................................................................... 26Other sensors ............................................................................................................................................................ 26Clustered sensors, sensor modules and sensor fusion ............................................................................................... 28
Automotive network design......................................................................................................................................... 31Network types and design ........................................................................................................................................ 31
Systems Engineering .................................................................................................................................................. 32Reconfiguration Flexibility ........................................................................................................................................... 32
Bus and Communication Standards ....................................................................................................................... 33CAN ........................................................................................................................................................................... 33LIN ............................................................................................................................................................................. 35Ethernet ..................................................................................................................................................................... 36FlexRay ...................................................................................................................................................................... 37MOST ........................................................................................................................................................................ 39
Software ......................................................................................................................................................................... 43Coping with growing complexity ................................................................................................................................ 43AUTOSAR .................................................................................................................................................................. 43GENIVI Alliance .......................................................................................................................................................... 46AutoLinQ .................................................................................................................................................................... 48Microsoft Auto ............................................................................................................................................................ 48ElectroBit ................................................................................................................................................................... 49JasPar ........................................................................................................................................................................ 49Domain Controller approach ...................................................................................................................................... 50
SAMPLE
2013 edition 3 © 2013 IHS
IHS Automotive | The Automotive Electric and Electronic Systems Report
Supplier Profiles ............................................................................................................................................................ 53Alpine Electronics ...................................................................................................................................................... 53Altran Technologies ................................................................................................................................................... 56ARM ............................................................................................................................................................................. 58Autoliv ......................................................................................................................................................................... 60Bosch .......................................................................................................................................................................... 66ContinentalAutomotive Electronics ........................................................................................................................ 78Continental ................................................................................................................................................................. 80C&S Group GmbH ...................................................................................................................................................... 96Delphi .......................................................................................................................................................................... 97Denso ........................................................................................................................................................................ 106dSpace Automotive electronics ..............................................................................................................................114Eberspächer ..............................................................................................................................................................116Elektrobit Corporation Automoitve lectronics ..................................................................................................... 120ELMOS Semiconductor ........................................................................................................................................... 123FEV ............................................................................................................................................................................. 127Freescale Semiconductor ....................................................................................................................................... 130Fujitsu ........................................................................................................................................................................ 137Harman ...................................................................................................................................................................... 140Hella ........................................................................................................................................................................... 144IAV .............................................................................................................................................................................. 149IInfineon .................................................................................................................................................................... 150Infosys ....................................................................................................................................................................... 155Intecs ......................................................................................................................................................................... 156Johnson Controls .................................................................................................................................................... 157Lear ............................................................................................................................................................................ 165Magna ........................................................................................................................................................................ 170Magneti Marelli ........................................................................................................................................................ 179MBTech Group ......................................................................................................................................................... 184Mentor Graphics ...................................................................................................................................................... 186Mitsubishi Electric ................................................................................................................................................... 188NEC Tokin ................................................................................................................................................................. 192STMicroelectronics ................................................................................................................................................. 194Texas Instruments ................................................................................................................................................... 198TRW Automotive ...................................................................................................................................................... 201
FiguresFigure 1: Global market revenue forecast for OEM electronic systems (billions) .................................................. 5Figure 2: Electronic Stability Control installation rates ............................................................................................. 6Figure 3: High performance domain control ECUs can simplify overall network complexity .............................. 7Figure 4: A schematic of data fusion from multiple sensors..................................................................................... 8Figure 5: Temperature and shock operating conditions for automotive electronic components ...................... 11Figure 6: Typical temperatures at which automotive electronic components ..................................................... 11Figure 7: Failure rate requirements of automotive electronic components .......................................................... 12Figure 8: The development of processor clock frequencies ................................................................................... 13Figure 9: Additional functions and changes in electrical architecture .................................................................. 14Figure 10: Additional functionality requires higher voltages – 48 volts ................................................................. 16Figure 11: Exponential growth in communications connections ............................................................................ 18Figure 12: Fibre optic cable and POF structure ........................................................................................................ 19Figure 13: Examples of automotive sensor applications ......................................................................................... 23Figure 14: Estimated sensor market size ($ billion) .................................................................................................. 24Figure 15: Heated oxygen lambda sensor ................................................................................................................. 25Figure 16: Optical torque and position sensor .......................................................................................................... 26
SAMPLE
2013 edition 4 © 2013 IHS
IHS Automotive | The Automotive Electric and Electronic Systems Report
Figure 17: Fusing multiple sensor information for driver assistance systems ...................................................... 27Figure 18: A slip control system ECU with integrated inertial control sensors .................................................... 28Figure 19: Evolution of Bosch radar sensors ............................................................................................................ 28Figure 20: Aggregate volume for radar sensors supplied by Bosch ...................................................................... 29Figure 21: Market segmentation development for in-vehicle networks................................................................. 31Figure 22: Cost versus speed for communication standards ................................................................................. 33Figure 23: CAN networks significantly reduce wiring requirements ..................................................................... 34Figure 24: Uses for the various communication standards .................................................................................... 35Figure 25: A schematic representation of the FlexRay architecture ...................................................................... 37Figure 26: MOST Cooperation members 2013 .......................................................................................................... 40Figure 27: The convergence of automotive and consumer electronics ................................................................. 41Figure 28: A MOST Infotainment system in a heterogeneous ................................................................................. 42Figure 29: AUTOSAR software architecture showing components and interfaces ............................................. 44Figure 30: Volume of cars sold (2009) ........................................................................................................................ 44Figure 31: AUTOSAR timeline ..................................................................................................................................... 45Figure 32: AUTOSAR implementation plan ................................................................................................................ 46Figure 33: Volume of ECUs utilising AUTOSAR ......................................................................................................... 46Figure 34: GENIVI involved partners ........................................................................................................................... 47Figure 35: Functional units of a GENIVI IVI software platform ............................................................................... 47Figure 36: Automotive domain characteristics ......................................................................................................... 50
TablesTable 1: Requirements on electronic devices ........................................................................................................... 10Table 2: Bus and communication standards comparison ....................................................................................... 38
SAMPLE

2013 edition 6 © 2013 IHS
IHS Automotive | The Automotive Electric and Electronic Systems Report
legislated systems including electronic stability control (ESC) (Figure 2) and tire pressure monitoring systems (TPMS) come into play, both of which require significant electronic content. Also serving as an engine of market growth is the effort among OEMs to add advanced driver assistance systems (ADAS). Such mechanisms can enhance car safety, a key selling point. Illustrative of its promise and potential, the ADAS electronics market is estimated to almost triple between 2010 and 2020.“ADAS features are finding their way into more and more vehicles,” comments Scott. “The integration of ADAS into the instrument cluster and head-up display (HUD) is expected to be commonplace in the future.”
In particular, instrument clusters are becoming more advanced, featuring at least one LCD display and allowing ADAS features to be exhibited. For their part, head-up displays represent an ideal way to deliver ADAS information, showing data directly in the driver’s field of view. HUDs with ADAS are now available as a feature in the premium D and E car segments, and are expected to gain a strong presence in the C-segment of affordable small family cars within the next five years.
Figure 2: Electronic Stability Control installation rates
%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
2008
2009
2010
2011
2012
2013
2014
2015
2016
inst
alla
tion
rate
(per
cent
age)
year
NAFTA Europe Japan Australia Korea WORLD China Russia
Source: Bosch © 2013 IHS
based on production of passenger cars and LCV <6t
Combiner displays are likely to drive the growth of the automotive HUD segment, as they eliminate the development costs associated with windscreen displays. The combiner is an angled flat piece of glass located in front of the viewer that redirects an image from a projector in such a way for the field of view and the projected image to be seen at the same time. Caution should still be exercised while using the feature, as it relates to the amount of information displayed on the HUD: if too much information appears, the display could become a distraction, transforming a safety feature into a safety concern instead.
From a historical perspective the first new solutions to overcome the stretched functionality of conventional electrical systems appeared in the 1990s, when Mercedes introduced the multiplexed CAN network, BMW launched the multiplexed system in the 3 Series E46 and Volvo incorporated a multiplexed architecture in the S80 model. The S80’s system was a combination of 18 ECUs controlling 24 modules that govern most of the electrical functions in the vehicle. The system is designed to provide a common communication platform for all vehicle electronics.
The hardware structure of the multiplex involves two main cables or data buses going around the vehicle connecting all the modules. One cable is the power cable to provide electricity to the modules, while the other is a high capacity data cable to carry signals from ECUs. Multiple digital signals are transmitted through the data cable at any given time, and each module recognises its own and follows the instructions. Hence multiplex allows an unlimited number of modules to activate simultaneously. The speeds at which signals travel differ by function. For instance, the powertrain management system uses high-speed bus, while a window regulator uses slower speeds.
SAMPLE
2013 edition 7 © 2013 IHS
IHS Automotive | The Automotive Electric and Electronic Systems Report
Multiplex bought various advantages to the system. It drastically reduced weight and packaging restrictions in a vehicle because of fewer cables and connections. Fewer cables help reduce the probability of errors, thereby improving its system reliability. A single communication platform connects all the ECUs, modules and software, which can be serviced, checked and updated from a single source. This eases the task of finding faults during diagnosis.
Even at the vehicle assembly stage, multiplexing saves time, as built-to-order cars would require fewer changes to the vehicle architecture according to specifications and equipment chosen by customers. Even the post delivery addition of equipment is easier on multiplex by simply connecting them to the system. New versions of software can similarly be uploaded in the car through a single access point.
The demand for additional comfort and safety features in vehicles is forecast to steadily grow. This is increasingly becoming the key differentiator in a customer’s purchasing decision. Hence, added electronics and software in vehicles are inevitable, leading to complexity and, probably additional costs. The answer is to enable re-use of software by adopting common processes, incorporating common architectures and developing more efficient validation techniques. Since software has a longer lifecycle compared to hardware, a robust platform is required for fast evolving head units. The industry knows that standardisation has to pick up speed, with more players joining the architecture alliances, such as AUTOSAR, MOST (Media Oriented Systems Transport), FlexRay and Genivi, which have shown material benefits.
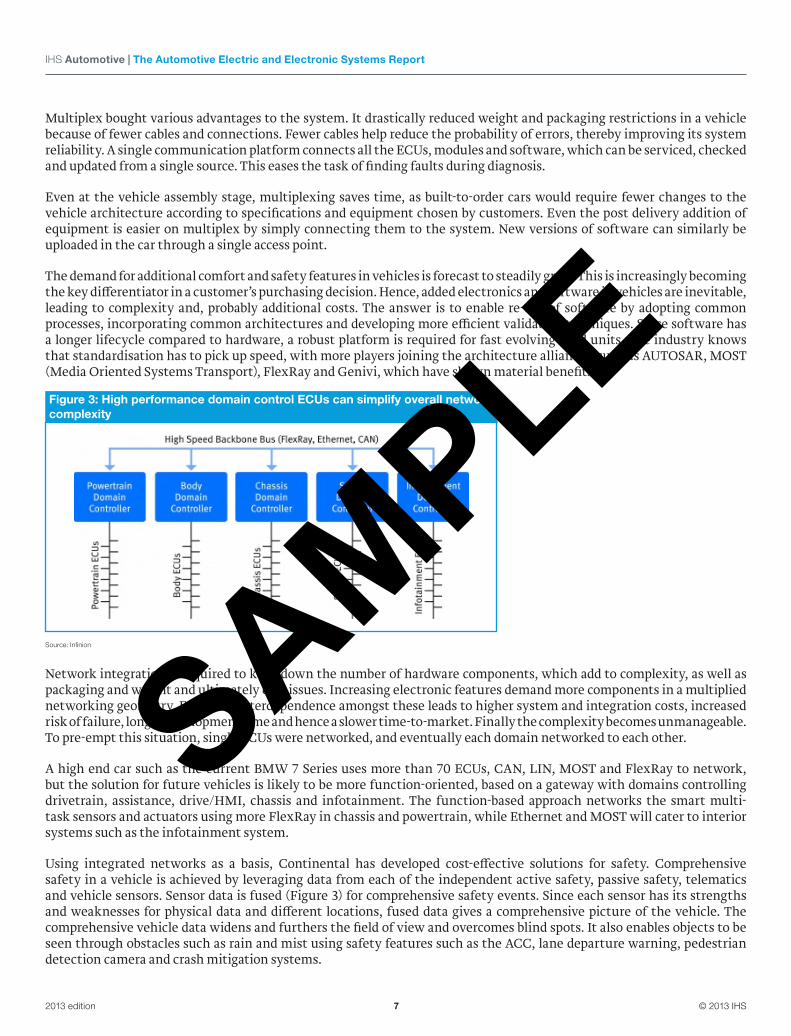
Figure 3: High performance domain control ECUs can simplify overall network complexity
Source: Infinion
Network integration is required to keep down the number of hardware components, which add to complexity, as well as packaging and weight and ultimately cost issues. Increasing electronic features demand more components in a multiplied networking geometry. Excessive interdependence amongst these leads to higher system and integration costs, increased risk of failure, longer development time and hence a slower time-to-market. Finally the complexity becomes unmanageable. To pre-empt this situation, single ECUs were networked, and eventually each domain networked to each other.
A high end car such as the current BMW 7 Series uses more than 70 ECUs, CAN, LIN, MOST and FlexRay to network, but the solution for future vehicles is likely to be more function-oriented, based on a gateway with domains controlling drivetrain, assistance, drive/HMI, chassis and infotainment. The function-based approach networks the smart multi-task sensors and actuators using more FlexRay in chassis and powertrain, while Ethernet and MOST will cater to interior systems such as the infotainment system.
Using integrated networks as a basis, Continental has developed cost-effective solutions for safety. Comprehensive safety in a vehicle is achieved by leveraging data from each of the independent active safety, passive safety, telematics and vehicle sensors. Sensor data is fused (Figure 3) for comprehensive safety events. Since each sensor has its strengths and weaknesses for physical data and different locations, fused data gives a comprehensive picture of the vehicle. The comprehensive vehicle data widens and furthers the field of view and overcomes blind spots. It also enables objects to be seen through obstacles such as rain and mist using safety features such as the ACC, lane departure warning, pedestrian detection camera and crash mitigation systems.
SAMPLE