1979 hundal - response of a base excited system with coulomb and viscous friction
TRANSCRIPT
8/10/2019 1979 Hundal - Response of a Base Excited System With Coulomb and Viscous Friction
http://slidepdf.com/reader/full/1979-hundal-response-of-a-base-excited-system-with-coulomb-and-viscous-friction 1/8
~our rt al of Sound and Vi brat i on 1979) 64 3), 371-378
RESPONSE OF A BASE EXCITED SYSTEM WITH COULOMB
AND VISCOUS FRICTION
M. S. HUNDAL
Department of
Mechanical
Engineeri ng,
The University of Vermont, Burlington, Vermont 0540 5. U.S.A.
Received 12 October 1978, and in revisedform 10
January 1979)
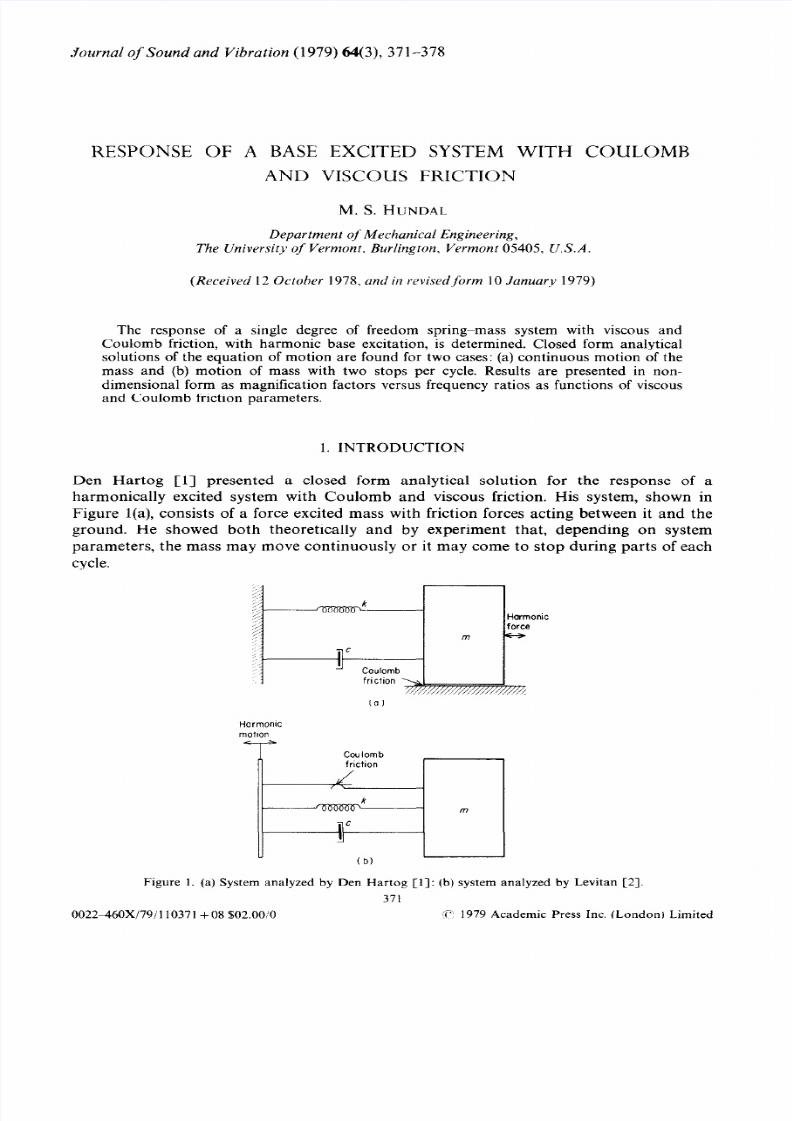
The response of a single degree of freedom springgmass system with viscous and
Coulomb friction, with harmonic base excitation, is determined. Closed form analytical
solutions of the equation of motion are found for two cases: (a) continuous motion of the
mass and (b) motion of mass w ith two stops per cycle. Results are presented in non-
dimensional form as magnification factors versus frequency ratios as functions of viscous
and Coulom b friction parameters.
1. INTRODUCTION
Den Hartog [l] presented
a closed form analytical solution for the response of a
harmonically excited system with Coulom b and viscous friction. His system, shown in
Figure l(a), consists of a force excited m ass with friction forces acting b etween it and the
ground. He showed both theoretically and by experiment that, depending on system
parame ters, the mass may move continuously or it may come to stop during parts of each
cycle.
Harmon i c
m o t i o n
Coo l omb
f r i c t i on
b )
Figure 1. (a) System analyzed by Den Hartog [l]: (b) system analyzed by Levitan [2].
371
0022460X/79/1 10371+08 02.00:0
V 1979 Academic Press Inc. (London) Limited

8/10/2019 1979 Hundal - Response of a Base Excited System With Coulomb and Viscous Friction
http://slidepdf.com/reader/full/1979-hundal-response-of-a-base-excited-system-with-coulomb-and-viscous-friction 2/8
372
M S HUNDAI
Levitan [23 analyzed the motion of a system with harmonic displacement of the base,
shown in Figure l(b). The friction forces in his model act between the base and the mass.
He used a Fourier series approximation for the Coulomb friction force.
This paper presents a closed form solution for the response of the system shown in
Figure 2. It is a base excited system in which the viscous friction force acts between base
and the mass, whe reas the Coulomb friction oppo ses the mass motion relative to the
ground. The model also represents a system in which an active device is mounted on the
mass. The device would act as a vibration controller, applying a constant force to the
mass in a direction opposite to its velocity. Curves of magnification factor \;ersus
frequency ratio are given, showing the effects of the two friction param eters. It is shown
that the mass motion may be continuous or one with stops during each cycle, depending
on system parameters.
Y
X’
k
m
c
Coulomb
I
frlctlon
, 1,1, II // ,/ ,/ l’,,
,,x, /‘-/ii-7
Figure 2. System with Coulomb friction between mass and ground, with harmonic excitation of the base
2. EQUATION OF MOTION
The equation of motion for the system is
md2.x’ldt2 + cd.x’/dt + kx’ + F’ = cd~‘/dt + 12~
(1)
where ) =
Ycos wt+p)
is the base motion and F’ is the force of Coulomb friction (see
Figure 2). The other symbols in equation (1) have their customary meanings (a list of
symbols is given in the Appendix). When the mass is in motion F’ = F sign(dx’/dt). When
the mass is at rest and the applied force is insufficient to overcom e the Coulomb friction,
the magnitude of the Coulomb force is then given by
F’ = - kx’ + L’
dJt/dt +
ky.
2)
Equation (1) is now put in a non-dimensional form by defining the following dimension-
less variables and parameters: time T =
w,t:
displacement x = x’/Y: Coulomb force
X; = F’lk Y; frequency ratio r = w/w,.
Here o, =
k/m)‘12.
Also z =
c/2 km)’
damping ratio. Equation (1) now becom es
,? + 22i + x + X; = -2~ sin(rT+p) + cos rT+p),
whe re dots represent differentiation with respect to
T.
2 is the
3)
3. CONTINUOUS MOTION OF THE MASS
The system is assumed to have reached steady state, and it is further assumed that the
mass is in continuous motion between its extrem e positions x = X, and x = -x,.

8/10/2019 1979 Hundal - Response of a Base Excited System With Coulomb and Viscous Friction
http://slidepdf.com/reader/full/1979-hundal-response-of-a-base-excited-system-with-coulomb-and-viscous-friction 3/8
COULOMB AND VISCOUS FRICTION
373
x, = X6&:’
Y is thus the magnification factor. For the half cycle of mass motion when
.i- < 0, equation (3) becom es
jl + 2z.t + s = X, - 2~ sin(rl”+p) +
cos rT+p),
(4)
where X, = F/kY. The boundary conditions on equation (4) are
s = x,,, and
q-0
. at T = 0,
5)
s = -X0.
and .q = 0, at T = n r.
(6)
Such a motion of the mass and that of the base a re shown in Figure 3, which also clarifies
the role of the phase angle p. Equation (4) can now be solved for the steady state response.
The general solution is
x(T) = e
“(C, sin q7+C , cos
qT) + Xf + X,
sin(rT+r)
(7)
where
q =
(1 -z2)r12. The last term in equation (7) represents the steady state harm onic
response of the system in the absence of Coulomb friction. Thus
X, = ([l +(2zr)2],‘[(1 -12)2 +(2z,.)x])1,‘Z
(8)
and th e phase angles r and p are related by
X,[-2zrsine+(l-r’)cosr] = -sinp + 2zrcos p,
X,[(I-r2)sine+2zrcose] = cosp-2zrsinp.
(9)
Applying the boundary conditions (5) yields
C, = X, - X,- - X, sin e,
C, = zC,j’q - X, r cos e)/q.
10,
11)
For the sake of brevity the symbols
S, = sin(qn/r),
C, = cos(qxjr),
E = eern*
are defined, and also
A
11 = zS,E/q+l +C,E)X,, A,2 = rS,EX,/q,
A
2 1 = z2/q + q) S, EX,,
A,, = (zS,
E/q - 1 - C, E) rX,,
B, = x, + Xf + X,-Xf) C,+zS,jq)E,
B, = X, - Xf) z2/q + q) S, E. (12)
Figure 3. Harmonic base motion and continuous motion of the mass

8/10/2019 1979 Hundal - Response of a Base Excited System With Coulomb and Viscous Friction
http://slidepdf.com/reader/full/1979-hundal-response-of-a-base-excited-system-with-coulomb-and-viscous-friction 4/8
374 M S HUNDAI
Upon substituting the values of C, and C, in equation (7) and applying the boundary
conditions (6), the following two equations are obtained:
A,, sine + A,,cose = B,,
A,,
sine +
A,, cos e = B,.
(13)
Equations (13) can now be solved for sine and cos e. With
M
and N defined as functions
of system parameters by
M =
(l-2zS,Ejq-E’)/(l +C,E+E*),
N = 2S,E/rq(l+2C,E+E2),
the solution of equations (13) is
sin e = (X, + MX f)iX,, cos e = NX ,/X,,
which yields an explicit expression for X,:
X, = -
MX , + X; - N’X;)?
(14)
(15)
16)
4. LIMITS OF CONTINUOUS MOTION
The solution of equation (4) given in section 3 is valid only when Z? < 0 for 0 < T < n/r.
This condition is used to determine the maximum values of z and X, for which a
continuous motion is possible. Upon differentiating equation (7) and substituting from
equations (lo), (11) and (15), the required condition is found to be
i = e-‘TIXf(l +M)(sin
qT)/q + zrXf
N(sin
qT)/q - rXf N cos qT]
+ rX, N cos rT - r X, +X, M) sin rT < 0,
for 0 <
T < n/r.
(17)
5. MOTION OF MASS WITH STOPS
When the magnitude of the Coulomb friction force is sufficiently high, the mass, once it
come s to a stop at either end of its stroke, will not begin to move until the applied force is
larger than the Coulomb force. Let the mass be in motion for 0 d T d T, and to rest for
T, < T < n/r
during the half cycle considered above, as illustrated in Figure 4. Thus
during 0 <
T < T,
equation (4) and its solution, equation (7), are valid, with the boundary
conditions
x = x,, and i = 0, at
T = 0,
18)
x = -x,,
and k-0, at
T=T,.
(19)
During the interval T, < T Q rc/r, from equation (3),
x - X> =
-2zr
sin(rT+p) +
cos rT+p),
which is also valid at
T = 0.
At this instant, as motion is about to ensue, X; = X,, and
therefore
X, -X, = -2zrsinp + cosp.
20)
There is, thus, an additional unknown T,, and an additional equation, (20).
Applying the boundary conditions (18) yields the same values of C, and C, as given in
equations (10) and (11). Nex t, by applying the boundary conditions (19), using equations

8/10/2019 1979 Hundal - Response of a Base Excited System With Coulomb and Viscous Friction
http://slidepdf.com/reader/full/1979-hundal-response-of-a-base-excited-system-with-coulomb-and-viscous-friction 5/8
COULOMB AND VISCOUS FRICTION
375
t
Figure 4. Harmonic base motion and mass motion with one stop per half cycle.
(20) and (9) to eliminate X, and then p, respectively, two equations in sin e and cos e are
obtained. Aga in, for brevity, the symbols S, = sinrT,, C, =
cosrT ,, S,, =
sinqT,,
C’,, =
cosqT,
and
E, = e-
zTo
re defined, and further,
D,, = 1 -
r2 + C, - r2E,(CqO +zSq0/q) ,
D , , = 2zr + S, + 2zrE,C, , + r(2z2-1)E0S4,, /q,
D 2, = -S, + r , ,/q, D22 = co - J (C,, +zS,o/d.
(21)
The equations in sin e and cos e are then
D,,sine +
D , ,cose = -2X , /X, , D , ,
sine +
D ,,cose = 0.
(22)
Equations (22) can be solved numerically for the unknow ns T, and e. The correspond-
ing values of p and X , can then be found from equations (9) and (20) respectively.
6. RESULTS
Plots of the magnification factor X, are shown in Figure 5 for various values of
dam ping ratio and dimensionless Coulom b friction force. The broken lines represent the
boundaries of the regions in which continuous motion of the mass and motion with stops
exist. These broken lines are obtained by applying the condition given by equation (17).
The portions of the curves lying above the broken lines correspond to continuous
motion, and are defined by equation (16). Magnification factors for the case of mass
motion with two steps per cycle are given by the curves lying below the broken lines in
Figure 5. These portions of the curves are obtained as described in section 5.
It is evident that for z = 0.1, see Figure 5(a), the mass motion is nearly zero for X, = 1.
It can be shown that for X, > 1, for a range of frequency ratios, the mass motion will be
zero. The condition for no response of the mass is that the limiting C oulomb friction force
be greater than the applied force: i.e., the sum of spring and viscous friction forces. From
equation (4), this condition is
X, > [1+(2zr)2]1/2,
or
r < ( XT -
1)1/2/(2z).
(23)
At high frequency ratios the magnification factor approaches constant values. As
r -+ co
equation (16) becomes X, = X,-X ,, since
E -+ 0 . A4 +
1 and N -+ 0.

8/10/2019 1979 Hundal - Response of a Base Excited System With Coulomb and Viscous Friction
http://slidepdf.com/reader/full/1979-hundal-response-of-a-base-excited-system-with-coulomb-and-viscous-friction 6/8
3 7 6
M. S. HLJNDAL.
2
I I
e)
I
Xf
Figure 5. Magnification factor DS.frequency ratio. Portions of curves above broken lines represent continuous
motion of mass, below broken lines one stop per half cycle. (a) z = 0.1; (b) z = 0.2; (c) z = 0.3: (d) z = 0.4: (e)
z = 0.5.
7. CONCLUSION
Closed form solutions for the response of the system shown in Figure 2 with harmonic
base excitation have been obtained. Conditions governing the transition from a con-
tinuous motion of the mass to one with two stops during each cycle have been
determined. These two types of motion are illustrated in Figure 6.
In the absence of viscous friction the system is mathematically identical to that of Den
Hartog [l] under the same restriction. Furthermore, as pointed out by Den Harto g, mass
motion with more than two stops per cycle is also possible. The condition for this type of
motion, which occurs at low frequency ratios, is that 1 > 0 for 0 < T < To he expression
for the velocity being equation (17).

8/10/2019 1979 Hundal - Response of a Base Excited System With Coulomb and Viscous Friction
http://slidepdf.com/reader/full/1979-hundal-response-of-a-base-excited-system-with-coulomb-and-viscous-friction 7/8
COULOMB AND VISCOUS FRICTION
77
Cb)
A
P-
x(T)
I-
2L
Figure 6. M ass motion us. base motion. z = 0.3: r = 1. (a) X, = 0.2: (b) X, = 0.8
REFEREN ES
1. J . P. DEN HARTOG 1931 Transactions of the American Society ofMecha nical Engineers 53, 107- I 15.
Forced vibrations with combined Coulom b and viscous friction.
2. E. S. LEVITA N 1960 Journal of the Acoustical Society ofAmerica 32, 1265-126 9. Forced oscillation
of a spring-mass system having combined Coulomb and viscous damping.

8/10/2019 1979 Hundal - Response of a Base Excited System With Coulomb and Viscous Friction
http://slidepdf.com/reader/full/1979-hundal-response-of-a-base-excited-system-with-coulomb-and-viscous-friction 8/8
378
M S HIJNDAL
APPENDIX: NOTATION
A, coefficients in equations (13) defined by equations (12)
Bi right-hand side terms in equations (13) defined by equations
(12)
Ci unknown coefficients in equation (7)
co cos rT,
C, cos(&r)
C,, cos qT,
c coefficient of viscous friction
D, coefficients in equations (22), defined by equations (21)
E ,-Zn r
EO
;
F
k
M
P
4
SO
s
@J
T
’
Y
function of system parameters, defined by equations (14)
phase angle of base displacement; see Figure 3
dimensionless natural frequency w ith viscous friction, = ( 1 z’)l/’
frequency ratio, = w/w ,
sin
rTo
sin(yn/r)
sin
qTo
dimensionless time, = w, t
dimensionless time, in the case of motion with stops, at which mass c omes to a stop
time
limiting value of dimensionless Coulomb friction force , =
F/kY
dimensionless Coulomb friction force, =
F’/k Y
magnification factor with Coulomb and viscous friction, = x,,,jY
magnification factor with viscous friction only
dimensionless displacement, = x’/Y
displacement
Z
w
amplitude of base displacement
base displacement
damping ratio,
=c/2 km)“’
base excitation frequency
w, undamped natural frequency
e-zT,,
phase angle associated w ith steady state harmonic response; see equation (7)
limiting value of Coulomb friction fo rce
Coulomb friction force, <F
spring stiffness
function of system parameters, defined by equations (14)
mass