22. introduction to formal verificationjaa/lectures/22-1.pdfformal veri cation approaches theorem...
TRANSCRIPT

22. Introduction to Formal Verification
Jacob Abraham
Department of Electrical and Computer EngineeringThe University of Texas at Austin
VLSI DesignFall 2017
November 20, 2017
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 1 / 48

Verification in the Design Cycle
Implementation Verification: Forall feasible inputs the behavior ofthe circuit is consistent with thebehavior required by thespecification
Design Verification: For allfeasible inputs the design has anumber of properties required bythe specification
Current formal verification techniques focused on functionalverification
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 1 / 48

Formal Verification Approaches
Theorem Proving: Relationship between a specification andan implementation is regarded as a theorem in a logic, to beproved within the framework of a proof calculus
Used for verifying arithmetic circuits in industry
Model Checking: The specification is in the form of a logicformula, the truth of which is determined with respect to asemantic model provided by an implementation
Starting to be used to check small modules in industry
Equivalence Checking: The equivalence of a specification andan implementation checked
Most common industry use of formal verification
Symbolic Trajectory Evaluation: Properties specified asassertions about circuit state (pre- and post- conditions),verified using symbolic simulation
Used to verify embedded memories in industry
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 2 / 48

Equivalence Checking
Most common technique of formal verification used inindustry today
Typically, gate-level compared with RTL
Canonical representations, such as Binary Decision Diagrams(BDDs), or Satisfiability Solvers used for the comparison
Boolean equivalence checking is NP-completeMultipliers require an exponential number of BDD nodes
Commercial tools available from many vendors
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 3 / 48
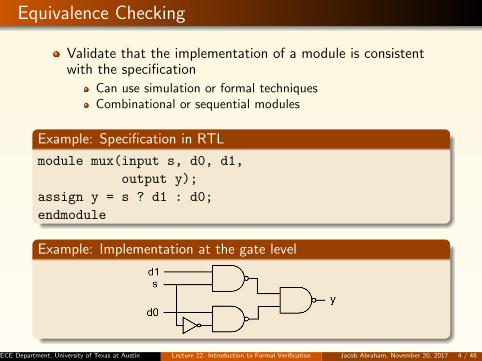
Equivalence Checking
Validate that the implementation of a module is consistentwith the specification
Can use simulation or formal techniquesCombinational or sequential modules
Example: Specification in RTL
module mux(input s, d0, d1,
output y);
assign y = s ? d1 : d0;
endmodule
Example: Implementation at the gate level
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 4 / 48

Decision Tree for A⊕B ⊕ C
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 5 / 48

Reduced, Ordered BDD (ROBDD)
F = A⊕B ⊕ C
Reduced, Ordered BDDs (ROBDDs) are canonical
Can represent sets of states, state-transition relations, etc.
Structure and complexity of ROBDDs for Symmetric Functions?ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 6 / 48

Example of ROBDD Reduction
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 7 / 48

Impact of BDD Variable Orderingf(x1, x2, . . . , x8) = x1 · x2 + x3 · x4 + x5 · x6 + x7 · x8
Ordering : x1 < x3 < x5 < x7 < x2 < x4 < x6 < x8
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 8 / 48
Figure modified from Wikipedia

Impact of BDD Variable Ordering, Cont’df(x1, x2, . . . , x8) = x1 · x2 + x3 · x4 + x5 · x6 + x7 · x8
Ordering : x1 < x2 < x3 < x4 < x5 < x6 < x7 < x8
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 9 / 48
Figure modified from Wikipedia

Variable Swapping – An example
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 10 / 48

Probabilistic Verification
Concept of arithmetic simulation
Transform Boolean function or circuit so that operationsperformed on arithmetic (rather than Boolean) variables
Evaluate specification and implementation for a randomarithmetic vector (result called a hash code)
If hash codes are different, the two are definitely notequivalentIf hash codes are the same, there is a small probability of error(that is, the two may not be equivalent)
error e = 1m , where m is the size of the integer space
Probability of error can be reduced by using integers from alarger space, or by repeating evaluation on another randomvector (error decreases exponentially)
The error after k runs, e = ( 1m)k
Example probability of error for 32-bit integers: 10−8
Each evaluation reduces error by the above factor
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 11 / 48

Indexed Binary Decision Diagrams
A BDD graph with multiple layersCharacteristics:
function graph is divided into k layerseach layer is strongly orderedtwo layers can have different orderingExample: F = (a1 ⊕ a2 ∨ a3 ⊕ a4) ∧ (a1 ⊕ a3 ∨ a2 ⊕ a4)
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 12 / 48

Satisfiability (SAT) Solvers
Can a Boolean Function be Satisfied?
Cast an equivalence checking problem as a SAT problem
Starts by converting Boolean formula into the ConjunctiveNormal Form (CNF) – (product of sums)
(a+ b+ c)(a+ e+ f)(c+ d+ g). . .
Goal is to find an assignment satisfying every term (if anyclause is 0, there is no satisfying assignment)
Commercial and Open SAT solvers available
Most verification tools now use BDDs + SAT
Some bring in ATPG ideas – called “structural SAT”
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 13 / 48

Truth Table to CNF
Put negation of formula in DNF
For each “0” or “F” row in table, make a term equivalent tothe corresponding assignment
Negate the disjunction of the terms
By DeMorgan’s Law, switch AND and OR, and complementliterals
Example: Express x↔ y (x · y + x · y) in CNF
Two terms for “0”: x=1, y=0 and x=0, y=1=⇒ function is “0” when xy + xy
CNF is: (x+ y)(x+ y)
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 14 / 48

Circuit to CNF
d ≡ (a+ b)
Clauses:(a+ b+ d)(a+ d)(b+ d)
e ≡ (c.d)
Clauses:(c+ d+ e)(d+ e)(c+ e)
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 15 / 48

Use of ATPG for Equivalence Checking
Use a tool (Automatic Test Pattern Generator) whichgenerates manufacturing tests
Detecting a “stuck-at-0” fault at Y (requires an input whichgenerates a 1 on Y) will prove inequivalence of the two circuits
Approach is not memory limited (like BDDs)
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 16 / 48
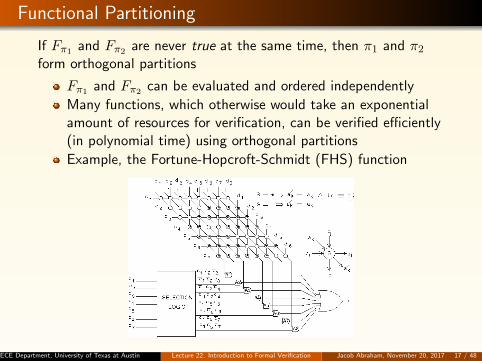
Functional Partitioning
If Fπ1 and Fπ2 are never true at the same time, then π1 and π2form orthogonal partitions
Fπ1 and Fπ2 can be evaluated and ordered independently
Many functions, which otherwise would take an exponentialamount of resources for verification, can be verified efficiently(in polynomial time) using orthogonal partitions
Example, the Fortune-Hopcroft-Schmidt (FHS) function
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 17 / 48

Term Rewriting for Arithmetic Circuit Checking
RTL Term-Level reductions
Verification of arithmetic circuits at the RTL level using termrewriting
RTL to RTL equivalence checking
Verified large multiplier designs like Booth, Wallace Tree andmany optimized multipliers using this rewriting technique
VERIFIRE
Dedicated Arithmetic Circuit Checker
Vtrans: Translates Verilog designs to Term Rewriting Systems
Vprover: Proves equivalence of Term Rewriting Systems
Iterative engineReturns error trace if proof not foundMaintains an expanding rule base for expression minimizationIncomplete, but efficient, engine
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 18 / 48
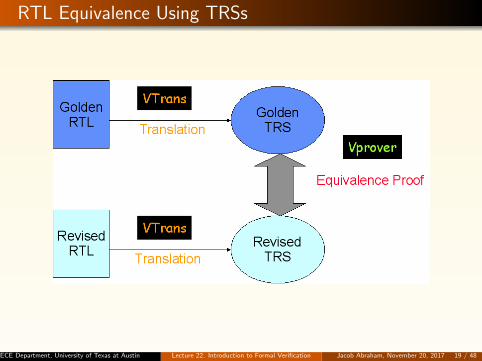
RTL Equivalence Using TRSs
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 19 / 48

Results on Multipliers
Different sizes of Wallace Tree Multipliers (Verilog RTL) comparedwith a simple Golden Multiplier (Verilog RTL) of the same size
Compare Verifire against Commercial Tools
Wallace Tree Verifire Commercial Tool 1 Commercial Tool 2
4x4 14s 10s 9s
8x8 18s 18s 16s
16x16 25s unfinished unfinished
32x32 40s unfinished unfinished
64x64 60s unfinished unfinished
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 20 / 48

Application of Theorem Proving
ACL2 used at AMD to formally verify FPUs
First used by Moore et al. to check the proof of correctness ofthe Kernel of the AMD 5k86 floating point division algorithm
Used to verify the RTL of K7 FPU
RTL primitives logical operations on bit vectorsDeveloped theory to prove RTL correct with respect to moreabstract IEEE standard
Theorem proving requires high degree of expertise
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 21 / 48

Symbolic Simulation
Equivalence checking between RTL and circuit schematics isdifficult for some circuits (e.g., custom arrays)
Critical timing and self-timed control logicLarge number of bit-cellsInherently complex sequential logic blocksDynamic logic
Traditional tools fail on such circuits
Very large state space, too many initial state/input sequencesfor simulation-based toolsBoolean equivalence tools only check static cones of logic, donot capture dynamic behavior
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 22 / 48

Example: Custom Control for Custom Array Structures
OUT pulse fans out to array READ/WRITE control signals
Equivalence checking does not work
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 23 / 48

Scalar Simulation
To prove that the circuit is a NAND gate, exhaustive simulationrequires 2n vectors
Antecedent Consequent
A = 0 (t0,t1) and B = 0 (t0,t1) C is 1 (t1,t2)
A = 0 (t0,t1) and B = 1 (t0,t1) C is 1 (t1,t2)
A = 1 (t0,t1) and B = 0 (t0,t1) C is 1 (t1,t2)
A = 1 (t0,t1) and B = 1 (t0,t1) C is 0 (t1,t2)
Table could be viewed as: Antecedent =⇒ Consequent
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 24 / 48

Ternary Simulation
Using three values (0, 1, X), N-input NAND requires N+1 vectorsto verify
Antecedent Consequent
A = 0 (t0,t1) and B = X C is 1 (t1,t2)
A = X and B = 0 (t0,t1) C is 1 (t1,t2)
A = 1 (t0,t1) and B = 1 (t0,t1) C is 0 (t1,t2)
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 25 / 48

Symbolic Simulation
Exhaustive Verification: N-input NAND requires 1 vector and Nvariables
Antecedent: A = “a”(t0,t1) and B = “b”(t0,t1)(“a” and “b” are Boolean variables)
Consequent: C = [¬ (a AND b)](t1,t2)
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 26 / 48

Symbolic Trajectory Evaluation
VERSYS symbolic trajectory evaluation tool developed atMotorola/Freescale
Based on VOSS (from CMU/UBC)
Trajectory formulasBoolean expressions with the temporal next-time operatorTernary values states represented by a Boolean encoding
Properties of type: Antecedent =⇒ ConsequentAntecedent, Consequent are trajectory formulasAntecedent sets up stimulus, state of the circuitConsequent specifies constraint on the state sequence
Used to verify PowerPC arrays at Motorola/Freescale in 8 –10% of the design timeBugs found during array equivalence checking
Incorrect clock regenerators feeding latchesControl logic errors in READ/WRITE enablesViolation of “one-hot” property assumptionsScan chain hookup errorsPotential circuit-related problems such as glitches and races
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 27 / 48

Design Verification
Digital systems similar to reactive programsDigital systems receive inputs and produce outputs in acontinuous interaction with their environmentBehavior of digital systems is concurrent because each gate inthe system simultaneously evaluating its output as a functionof its inputs
Check Properties of Design
Since specification is usually not formal, check design forproperties that would be consistent with the specification
Safety “something bad will never happen”
Liveness Property: “something good will eventually happen”
Temporal Logic and variations commonly used to specifyproperties
Example: Linear Temporal Logic (LTL) or Computation TreeLogic (CTL)
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 28 / 48

Example of Computation Tree
Traffic light controller
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 29 / 48

Operators
Referring to pathsA: For every pathE: There exists a path
Referring to states on a pathG: GloballyF: In the future (eventually)
ExamplesEF p: there is some path on which p is eventually trueAG p: for every path, at every state, p is true
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 30 / 48
EG R (True)EF Y (True)
AG(R+G) (False)

Use of ATPG to Check Properties
This moves verification of the design to the same level as themodels used to generate manufacturing test of the physicalchip
Using ATPG allows the verification engine to deal withtri-state signals, multiple clocks, etc.
Bounded Model Checking: Prove properties for a limited numberof cycles
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 31 / 48

Monitor State Machine for EGp
Find an input sequence of length n for which the system willsatisfy the property p
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 32 / 48

Monitor State Machine for EpUq
For some path of up to n cycles, there is a state where q holds andp holds in every previous state
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 33 / 48
Model Checking on IBM Power 4
“Functional formal verification” (equivalence checking andmodel checking) on ≈40 design components (IU, FPU,control, memory, etc.)
Found more than 200 design flaws at various stages and ofvarying complexity
At least one bug was found by almost every application offormal verification
Estimate: 15% of bugs would have evaded simulation
Some of the bugs literally escaped 1-2 years of simulation
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 34 / 48

Specifying Properties (Assertions) in Industry Tools
Used for both simulation monitoring and formal verification
Examples of assertion languages include Vera (Synopsys),Sugar (IBM), Property Specification Language,PSL (Acceleraconsortium), System Verilog
PSL/Sugar
Core based on Boolean and Temporal logic
Layer of user-friendly “syntactic sugar”
Comes in three flavors
VerilogVHDLGDL
Reference Manual:http://www.eda.org/vfv/docs/PSL-v1.1.pdf
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 35 / 48

System Verilog Assertions (SVA)
SVA
Assertions: Predicates placed in program
Immediate and Concurrent Assertions
assert, assume, cover, expect constructs
Immediate Assertions
assert (a == b);
Concurrent Assertions
assert property (@(posedge clk) req | → ack);
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 36 / 48

Cadence Formal Verification
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 37 / 48

Dealing with State Explosion
Verification is a very difficult problem
Even combinational equivalence checking problems (ATPG,SAT) are NP-complete
Checking sequential properties is only possible for smalldesigns
Additional problem of generating correct “wrappers” for themodule being verified
How can we deal with the complexity?
Use more powerful computers?
Computers double in capability (assuming we can programmulti-core processors) every couple of yearsAdding one state variable to a design doubles its states
Exploit hierarchy in the design
Develop powerful abstractions
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 38 / 48
Program Slicing
A Slice of a Design
Represents behavior of the design with respect to a given setof variables (or slicing criterion)
Proposed for use in software in 1984 (Weiser)
Slice generated by a control/data flow analysis of the programcode
Slicing is done on the structure of the design, so scales well
“Static analysis”
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 39 / 48

Antecedent Conditioned Slicing
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 40 / 48

Example of Antecedent Conditioned Slicing – I
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 41 / 48
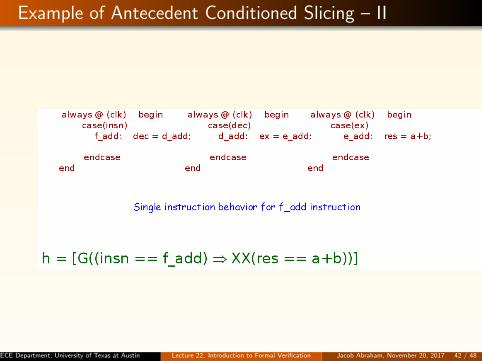
Example of Antecedent Conditioned Slicing – II
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 42 / 48
Experiments with Antecedent Conditioned Slicing
USB 2.0 Function Core
Verilog implementation from www.opencores.org
Properties from specification document
Safety properties expressed in LTL (G(a =⇒ c))
Verification engine: Cadence-BMC (bound of 24–50 steps)
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 43 / 48

Example USB Properties
G((crc5err ∨ ¬(match) =⇒ ¬(send token))If a packet with a bad CRC5 is received, or there is an endpointfield mismatch, the token is ignored
G((state == SPEED NEG FS) =⇒ X((mode hs) ∧(T1 gt 3 0ms) =⇒ (next state == RES SUSPEND))
If the machine is in the speed negotiation state, then in the nextclock cycle, if it is in high speed mode for more than 3 ms, it willgo to the suspend state
G((state == RESUME WAIT ) ∧ ¬(idle cnt clr) =⇒F (state == NORMAL))
If the machine is waiting to resume operation and a counter is set,eventually (after 100 mS) it will return to normal operation
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 44 / 48

Results on Temporal USB Properties
CPU seconds, on a 450 MHz dual UltraSPARC-II with I GB RAM
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 45 / 48

Verification of Processors Using Antecedent ConditionedSlicing
Verification of single-instruction issue, multi-stage pipelinedprocessors
Properties are at the Instruction level (not for an internalblock in the design)
Antecedent conditioned slicing provides an automaticdecomposition strategy
Individual “instruction machines”
Verified all the instructions of the OR1200 embeddedprocessor (www.opencores.org)
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 46 / 48

Single Instruction Verification
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 47 / 48

Results of OR1200 Verification
CPU seconds, 3GHz Pentium 4 processor with 1 GB RAM
SMV would not even compile the design without slicing
Instruction Instruction SMV time Memory UsageClass (seconds) (KB)
LSU l.ld 35.85 29104
LSU l.lws 33.91 28873
LSU l.sd 38.32 30941
SHF/ROT l.sll 26.81 23771
SHF/ROT l.srl 27.83 23771
SHF/ROT l.ror 27.83 26919
SPRS l.mfspr 226.97 50696
SPRS l.mtspr 212.27 48627
ECE Department, University of Texas at Austin Lecture 22. Introduction to Formal Verification Jacob Abraham, November 20, 2017 48 / 48