25 june 2009 dawn conway, amsr-e tlscf lead software engineer amsr-e team leader science computing...
TRANSCRIPT

25 June 2009 Dawn Conway, AMSR-E TLSCF Lead Software Engineer
AMSR-E Team Leader Science Computing Facility

25 June 2009 Dawn Conway, AMSR-E TLSCF Lead Software Engineer
• Science Software Status• New Sea Ice Drift Product• Quality Flags
AMSR-E TLSCF

25 June 2009 Dawn Conway, AMSR-E TLSCF Lead Software Engineer
• L2A Brightness Temperatures V10– April 2009– Compute a checksum from Latitudes, Longitudes, and Tb's,
attach it to the L2A file as a global attribute, and report it in the QA file. This aids in corrupted file recognition.
– RSS added the glint angles of the DirecTV 10 and 11 satellites to the Geostationary_Satellite_Glint_Angles field. The low glint angles correlate well with the recent observed RFI artifacts. Over oceans, RFI can be intense: +50 K for 18.7V, and +100 K for 18.7H. Cases this large correspond to low wind conditions with very smooth seas. Initial analysis over land did not reveal significant RFI impacts. The affected period for this RFI is from July, 2007 forward.
AMSR-E Science Software Status

25 June 2009 Dawn Conway, AMSR-E TLSCF Lead Software Engineer
AMSR-E Science Software Status
• L2B Ocean V06– October 2007– Last algorithm updates version V05, April 2007
• L2B Land V09– December 2008– Promote the product maturity status to Validated– Modify TLSCF software to accommodate an
incompatible shell command on the Science Team's hardware
– Last algorithm update version B05, March 2006

25 June 2009 Dawn Conway, AMSR-E TLSCF Lead Software Engineer
AMSR-E Science Software Status
• L2B Rain V10– October 2007– First Linux version– No algorithm changes– Significant algorithm update expected in December
2009
• L3 Sea Ice V09– September 2008– Promote the product maturity status to Validated

25 June 2009 Dawn Conway, AMSR-E TLSCF Lead Software Engineer
AMSR-E Science Software Status
• L3 Sea Ice V10– January 2009– Add multiyear sea ice mask to the snow depth product– Modify the tie point tables for the Antarctic to match those
of the Arctic– Resulted in significant Antarctic changes (Walt Meier,
NSIDC)
• L3 Sea Ice V11– June 2009– Correct an error in the snow depth over ice retrieval in the
Southern Hemisphere. This error, introduced in V10, caused snow depth to be overestimated by a factor of about two.

25 June 2009 Dawn Conway, AMSR-E TLSCF Lead Software Engineer
AMSR-E Science Software Status
• L3 Ocean V03– November 2007– Updates expected (due to RFI)
• L3 Land V06– December 2008– Promote the product maturity status to Validated– Modify TLSCF software to accommodate an
incompatible shell command on the Science Team's hardware
– Last algorithm update was version B04, May 2007

25 June 2009 Dawn Conway, AMSR-E TLSCF Lead Software Engineer
AMSR-E Science Software Status
• L3 Snow T08– July 2008– Promote the product maturity status to Transitional
• L3 Snow V09– December 2008– Promote the product maturity status to Validated – Modify ancillary file format – Last algorithm update version B07, April 2006

25 June 2009 Dawn Conway, AMSR-E TLSCF Lead Software Engineer
AMSR-E Science Software Status
• L3 Rain V06– April 2008– Promote the product maturity status to Validated– Skip duplicate (overlapping) scans in consecutive L2A
files– Improve L2A Brightness Temperature binning for monthly
ocean grids– Update the leap second ancillary file to include the leap
second which occurred at the end of 2005– Adapt the software package to run under Linux– Add a shell script which is used during installation. – Use larger system stacksize parameter

25 June 2009 Dawn Conway, AMSR-E TLSCF Lead Software Engineer
AMSR-E Science Software StatusData Product Version Delivery Date to SIPS
L2A TB’s V10 April 2009
L2 Ocean V06 October 2007
L2 Land V09 December 2008
L2 Rain V10 October 2007
L3 Sea Ice V11 V10 V09
June 2009 January 2009
September 2008 L3 Ocean V03 November 2007
L3 Land V06 December 2008
L3 Snow V09 T08
December 2008 July 2008
L3 Rain V06 April 2008

25 June 2009 Dawn Conway, AMSR-E TLSCF Lead Software Engineer
New AMSR-E Product
• L3 Sea Ice Drift– B01– Current code received at TLSCF May 2008
• Initial code received in March 2008• Returned due to various issues
– TLSCF code• Metadata• QA
– Integration and test at TLSCF– DAP delivery to the SIPS– Integration and test at SIPS – ESDT testing between SIPS and NSIDC
25 June 2009 Dawn Conway, AMSR-E TLSCF Lead Software Engineer
AMSR-E L2A Quality Flags

25 June 2009 Dawn Conway, AMSR-E TLSCF Lead Software Engineer
AMSR-E L2A Quality Flags
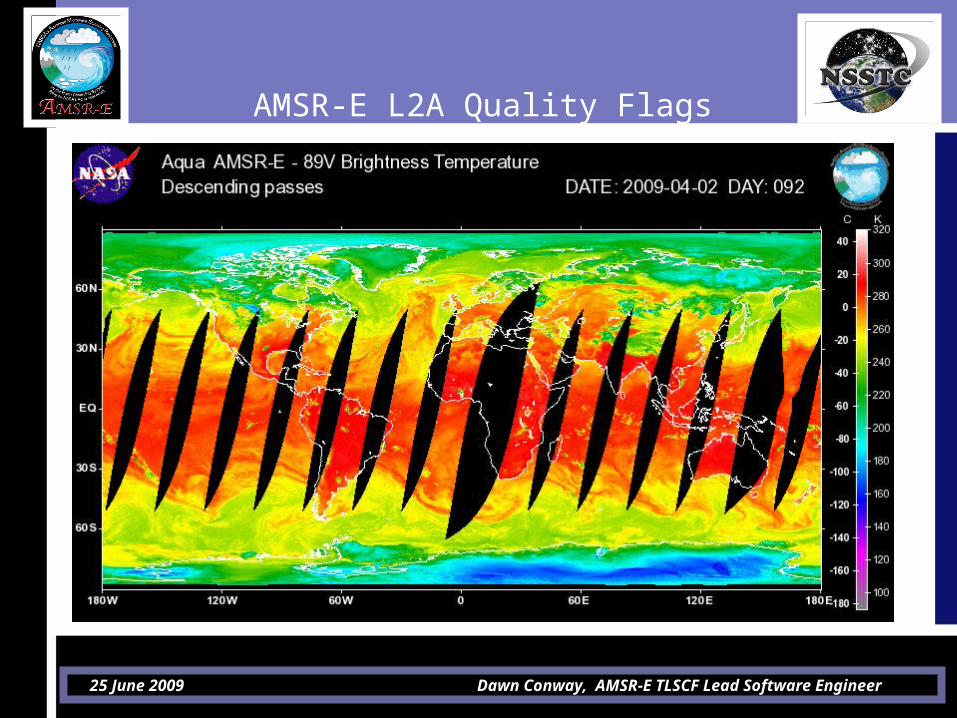
• Recent user question concerning L2B Rain product– April 2, 2009 descending orbit
(AMSR_E_L2_Rain_V10_200904021441_D.hdf)– Geolocation issue in the middle of an orbit– User asked if there was a flag in the data that would
indicate what the issue was– TLSCF confirmed the problem was due to a maneuver– There is a flag set in the L2A data that could be used by
the L2B and L3 algorithms that would have given the user this information
– In fact, there are 3 flags set in the L2A files that could be useful to the L2B and L3 algorithms

25 June 2009 Dawn Conway, AMSR-E TLSCF Lead Software Engineer
AMSR-E L2A Quality Flags
• L2A Flags– Scan_Quality_Flag
• 4-byte• Per scan• Pertain to all observations of a scan including all Level-1A
and resampled channels. • Identical flag repeated in each swath
– Channel_Quality_Flag• 2-byte• Per scan• 12 channels for the Low Resolution Swath• 2 channels for each of the High Resolution Swaths
– The summary bit 0 of the Channel_Quality_Flag is automatically set whenever any of the bits in the Scan_Quality_Flag are set.

25 June 2009 Dawn Conway, AMSR-E TLSCF Lead Software Engineer
AMSR-E L2A Scan Quality FlagBit Flag Description (nominal value=“0”)
0 Summary flag Set if any of the other bits are set
1 Antenna Spin Rate Set if spin rate is out of range
2 Navigation Set if the position or velocity of the navigation data for that scan is out of bounds
3 RPY Variability(only AMSR-A)
Set if the roll, pitch, or yaw variability from scan to scan is out of bounds
4 Roll, Pitch, Yaw Set whenever the roll, pitch, or yaw exceeds 2.0 degrees
5 Earth Intersection Set if any of the observation locations fail to fall on the Earth
6 Hot Load Thermistors
Set whenever the thermistors on the AMSR hot load are out of bounds
7-31
Not used

25 June 2009 Dawn Conway, AMSR-E TLSCF Lead Software Engineer
AMSR-E L2A Channel Quality Flag
• Bit 0 is set if any of the bits 2 through 15 are set, also set whenever any of the bits in the Scan_Quality_Flag are set.
• Bit 1: set if no TB was computed for this channel• Bit 2: set for first and last scans • Bit 3: set if there are serious calibration problems• Bits 4,5, 7-10: quality of thermistors, hot / cold counts• Bit 11: set if there is a geolocation error as reported
by the Scan_Quality_Flag• Bit 6: indicates if Teff is dynamic or static• Bit 12: set if Teff is not available
25 June 2009 Dawn Conway, AMSR-E TLSCF Lead Software Engineer
AMSR-E L2A Quality Flags
• L2A Quality Flags– Extremely useful to end users– Easy to incorporate in algorithms
• Duplicate per scan (copy from L2A)• Read, interpret, and include in your quality flags
– Updates to include these flags are welcome at any time