2.capitulo 2 - control robusto aplicado a ncs
TRANSCRIPT
7/26/2019 2.Capitulo 2 - Control Robusto Aplicado a NCS
http://slidepdf.com/reader/full/2capitulo-2-control-robusto-aplicado-a-ncs 1/16
Estructura del trabajo
Introducción 13
Capítulo 2
Control Robusto Aplicado a NCS
7/26/2019 2.Capitulo 2 - Control Robusto Aplicado a NCS
http://slidepdf.com/reader/full/2capitulo-2-control-robusto-aplicado-a-ncs 2/16
Control Robusto
Control Robusto Aplicado a NCS 14
2. CONTROL ROBUSTO APLICADO A NCS
En este capítulo se va a realizar la formulación del problema que es objeto de
estudio en este trabajo, que no es otro que la aplicación de técnicas de control robusto a
los NCS estudiados anteriormente.
En primer lugar se exponen las técnicas de control basadas en la optimización de
norma H2 y norma H∞. Es importante destacar que la norma H∞ es adecuada para ser
empleada en sistemas con incertidumbre.
En esta línea de acción, se juntan las teorías antes descritas de comportamiento,
H2/espacio de estados, con las de perspectiva, H∞/dominio de la frecuencia, en la forma
de teorías mixtas H2/H∞. En uno de los abordajes del control mixto se encuentra el
controlador que conjuga criterios cuadráticos de comportamiento H2 con restricciones
de robustez H∞. Este tipo de controlador, que de aquí en adelante se denominará como
H2/H∞, será materia de aplicación en el presente trabajo.
Una de las aplicaciones más importantes de la teoría de optimización de norma
infinita está en el control robusto, o sea, el diseño de controladores que aseguren
estabilidad y buen funcionamiento en sistemas con incertidumbre. Se presenta el
problema conocido como sensibilidad mixta, que es la base de la Teoría del Control
Robusto. Esencialmente, el problema más estudiado en control robusto es el de la
presencia de incertidumbre estructural debida a dinámica no modelada.
En el control de sistemas a través de redes, es necesario destacar la elección de
un controlador robusto de 2 g.d.l., el cual permitirá la doble acción de actuar
directamente sobre el modelo de la planta, presentando un buen comportamiento antelas incertidumbres del mismo, así como compensar los inconvenientes que se producen
en la red de comunicaciones, presentados en el capítulo anterior.
2.1. Control Robusto
En el diseño de controladores para sistemas físicos debe tenerse en cuenta la
exactitud del modelo y su complejidad matemática. Los modelos “exactos”, si es que se
pueden conseguir, requieren demasiado esfuerzo computacional, lo que hace que no
sean considerados propicios para propósitos de control. En la práctica, los modelos nolineales de orden muy alto suelen ser linealizados en torno de algún punto de operación
y también reducidos para obtener modelos nominales que puedan ajustarse a las
limitaciones computacionales o a las restricciones de implementación del controlador.
Estas técnicas introducen errores de modelado en la forma de dinámica no
modelada, que deben ser tenidos en cuenta en el proceso de cálculo del controlador.
Adicionalmente, los parámetros en los modelos nominales y de análisis no son
conocidos con precisión y pueden causar inestabilidades en caso de que no se tomen las
debidas precauciones.
7/26/2019 2.Capitulo 2 - Control Robusto Aplicado a NCS
http://slidepdf.com/reader/full/2capitulo-2-control-robusto-aplicado-a-ncs 3/16
Control Robusto
Control Robusto Aplicado a NCS 15
En la reducción de orden se desprecia una parte del modelo usado de forma que
se obtenga un controlador de bajo orden. Aunque la dinámica no modelada (parte
despreciada) no esté más en el modelo nominal, ella aún puede tener influencia en el
sistema controlado.
Además, los modelos nominales contienen incertidumbres en parámetros, queforman parte del modelo nominal. Así, un requerimiento fundamental en el diseño de la
ley de control es alcanzar y preservar la estabilidad en lazo cerrado en la presencia de
dinámica no modelada e incertidumbres paramétricas.
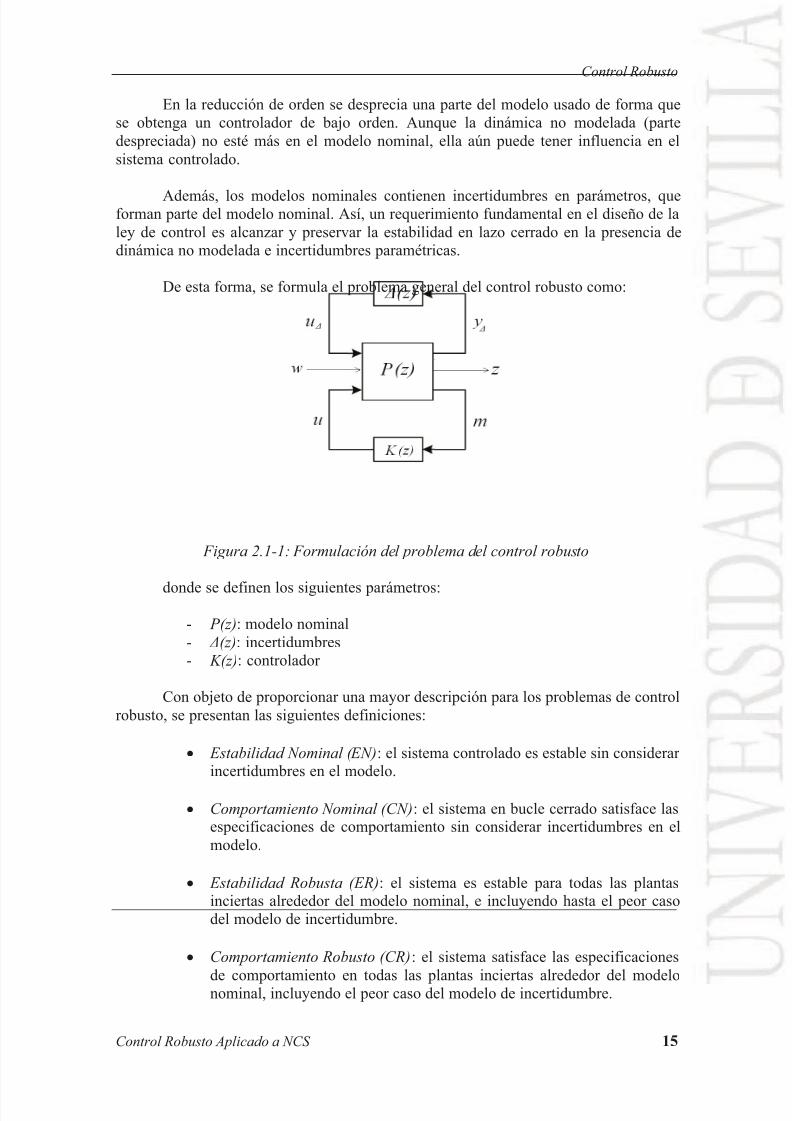
De esta forma, se formula el problema general del control robusto como:
Figura 2.1-1: Formulación del problema del control robusto
donde se definen los siguientes parámetros:
- P(z): modelo nominal
- Δ(z): incertidumbres
- K(z): controlador
Con objeto de proporcionar una mayor descripción para los problemas de control
robusto, se presentan las siguientes definiciones:
Estabilidad Nominal (EN): el sistema controlado es estable sin considerarincertidumbres en el modelo.
Comportamiento Nominal (CN): el sistema en bucle cerrado satisface lasespecificaciones de comportamiento sin considerar incertidumbres en el
modelo.
Estabilidad Robusta (ER): el sistema es estable para todas las plantasinciertas alrededor del modelo nominal, e incluyendo hasta el peor caso
del modelo de incertidumbre.
Comportamiento Robusto (CR): el sistema satisface las especificaciones
de comportamiento en todas las plantas inciertas alrededor del modelonominal, incluyendo el peor caso del modelo de incertidumbre.
7/26/2019 2.Capitulo 2 - Control Robusto Aplicado a NCS
http://slidepdf.com/reader/full/2capitulo-2-control-robusto-aplicado-a-ncs 4/16
Control Robusto
Control Robusto Aplicado a NCS 16
Las incertidumbres no paramétricas, tales como la dinámica no modelada,
típicamente ocurren en la región de alta frecuencia de los sistemas físicos. En el diseño
del controlador, la dinámica no modelada es tratada, frecuentemente, reduciendo el
comportamiento del controlador sobre una banda de alta frecuencia, por ejemplo
acotando la frecuencia de incertidumbre. El tratamiento de incertidumbres paramétricas
es un área donde se viene realizando mucha investigación. El presente trabajo estárelacionado con controladores que estabilizan (robustamente) un sistema ante la
presencia de incertidumbres paramétricas bajo la forma de incertidumbre estructural
multiplicativa.
Las incertidumbres también pueden ser vistas como perturbaciones sobre un
modelo nominal. Si un único controlador estabiliza la planta nominal y todos los
sistemas dentro de la vecindad generada por las perturbaciones, se dice que el
controlador estabiliza robustamente toda la familia de sistemas. La búsqueda de una
mayor vecindad para una planta dada, para la cual un único controlador produce
estabilidad en lazo cerrado, puede ser formulada mediante el problema de control H∞.
En aplicaciones prácticas, frecuentemente se desean controladores que sean
robustos y que también sean óptimos en una cierta clase. Tales controladores pueden ser
obtenidos con las técnicas de control H2/H∞, que buscan un compromiso entre robustez
y optimalidad.
A continuación, se ofrece una descripción detallada de los tres conceptos
fundamentales (Control Mixto H 2 /H ∞, Sensibilidad Mixta y Controlador Robusto de 2
g.d.l.) sobre los que se realizará la formulación del problema a estudiar en el siguiente
apartado, y en los que se basarán las estrategias de control robusto que se presentarán en
el siguiente capítulo.
2.1.1. Control Mixto H2/H∞
El control H2/H∞ es una estrategia de control óptimo que permite diseñar un
controlador estabilizante que garantice que el sistema controlado presente un
comportamiento óptimo y, al mismo tiempo, que tenga un margen de estabilidad
definido con respecto a incertidumbres, es decir, robustez. Así, en la Teoría de Control,
el problema de control H2/H∞ incorpora las normas H2 y H∞ simultáneamente, de
forma que se define la minimización de una norma H2 considerando restricciones en la
norma H∞. La norma H2 tiene en cuenta las características de comportamiento del
sistema y la norma H∞ representa una función de transferencia convenientementeescogida con el fin de garantizar estabilidad para una clase de perturbaciones.
Mientras que el diseño H2 resulta en un buen comportamiento nominal, los
controladores sólo son eficientes en la planta de diseño, planta que no considera un
modelo para el error cometido en el modelado. Como resultado, el comportamiento
alcanzado por sistemas de control H2, cuando son implementados en sistemas reales,
presentan limitaciones. Para alcanzar niveles adecuados de comportamiento en la
implementación, se debe considerar un modelo del error en el modelado cuando se
diseña el controlador, tal como se hace en la teoría de diseño de controladores H∞.

7/26/2019 2.Capitulo 2 - Control Robusto Aplicado a NCS
http://slidepdf.com/reader/full/2capitulo-2-control-robusto-aplicado-a-ncs 5/16
Control Robusto
Control Robusto Aplicado a NCS 17
Las teorías de control H2 y H∞ involucran formulaciones de problemas de
control en el dominio del tiempo que resultan en la minimización de una norma de
cierta función de transferencia. Así, se considera una perturbación en particular, o un
cambio en la señal de referencia, y luego se trata de optimizar la respuesta en lazo
cerrado. Al considerar señales de energía limitada en la entrada del sistema se puede
derivar una metodología de control basada en la norma H∞. Este último abordaje es degran interés dado que puede ser combinado con representaciones de modelos de
incertidumbre, haciendo posible la solución de complejos problemas de estabilidad y
comportamiento, lo que se conoce como control robusto H∞.
A menudo se intenta optimizar directamente ciertos objetivos más
representativos del sistema, tales como tiempo de estabilización, márgenes de
estabilidad u otros, en lugar de la norma de ciertas funciones de transferencia. Las
metodologías que involucran optimizaciones multiobjetivo de este tipo presentan
problemas difíciles de resolver computacionalmente hablando.
Figura 2.1.1-1: Estructura general de control mixto H 2 /H∞
En este grupo de controladores se encuentra el controlador H2/H∞, el cual
intenta optimizar el comportamiento de un sistema en lazo cerrado mediante la
minimización de la norma H2, que puede definir objetivos de comportamiento, teniendo
como restricción la robustez en estabilidad del sistema en lazo cerrado, que es medida
por la norma H∞.
Aún cuando el control H∞ provee estabilidad y comportamiento en presencia de
errores del modelo, el uso de la norma H∞ como medida de comportamiento puede
resultar conservativo. Teniendo esto en consideración, el diseño de controladores
H2/H∞ ha sido desarrollado para proveer una estabilidad robusta (H∞) y uncomportamiento nominal (H2) mediante la minimización de la norma H2 para un
conjunto de entradas/salidas, mientras la norma H∞ limita otro conjunto de
entradas/salidas, tal y como se muestra en la Fig. 2.1.1-1.
Así, la formulación del problema de control mixto H2/H∞ provee un balance
explícito entre las demandas conflictivas, comportamiento nominal y estabilidad
robusta, de forma que se pretenda encontrar un controlador, K(z), que minimice el
siguiente criterio:
+
sujeto a:

7/26/2019 2.Capitulo 2 - Control Robusto Aplicado a NCS
http://slidepdf.com/reader/full/2capitulo-2-control-robusto-aplicado-a-ncs 6/16
Control Robusto
Control Robusto Aplicado a NCS 18
donde T ∞(z) y T 2(z) se corresponden con las funciones de transferencia en bucle
cerrado entre el vector objetivo, z, y el vector de perturbaciones, ω, siendo γ0 y ν0 las
cotas conseguidas.
2.1.2. Sensibilidad Mixta
En este apartado se presenta el planteamiento de sensibilidad mixta, para
sintetizar un controlador robusto gracias a sencillos métodos de selección de las
funciones de ponderación.
Previamente es necesario definir las funciones de sensibilidad S(z) y de
sensibilidad complementaria T(z). Para ello considérese el siguiente esquema de controlclásico por realimentación de 1 g.d.l.:
Figura 2.1.2-1: Esquema de control con modelado de las perturbaciones
donde K(z), G(z) y Gd (z) son respectivamente el controlador, el modelo de la
planta y el modelo de las perturbaciones.
La entrada del controlador K(z) es r − ym donde ym = y + n es la salida medida yn es el ruido de medida. Luego, la entrada a la planta es:
u = K(z)(r - y - n) Ec. (2.1.2-1)
El objetivo de control es manipular u (en el diseño de K(z)) tal que el error de
control e permanezca pequeño a pesar de las perturbaciones d . El error de control e es
definido como:
e = r - y
donde r denota el valor de referencia para la salida.
7/26/2019 2.Capitulo 2 - Control Robusto Aplicado a NCS
http://slidepdf.com/reader/full/2capitulo-2-control-robusto-aplicado-a-ncs 7/16
Control Robusto
Control Robusto Aplicado a NCS 19
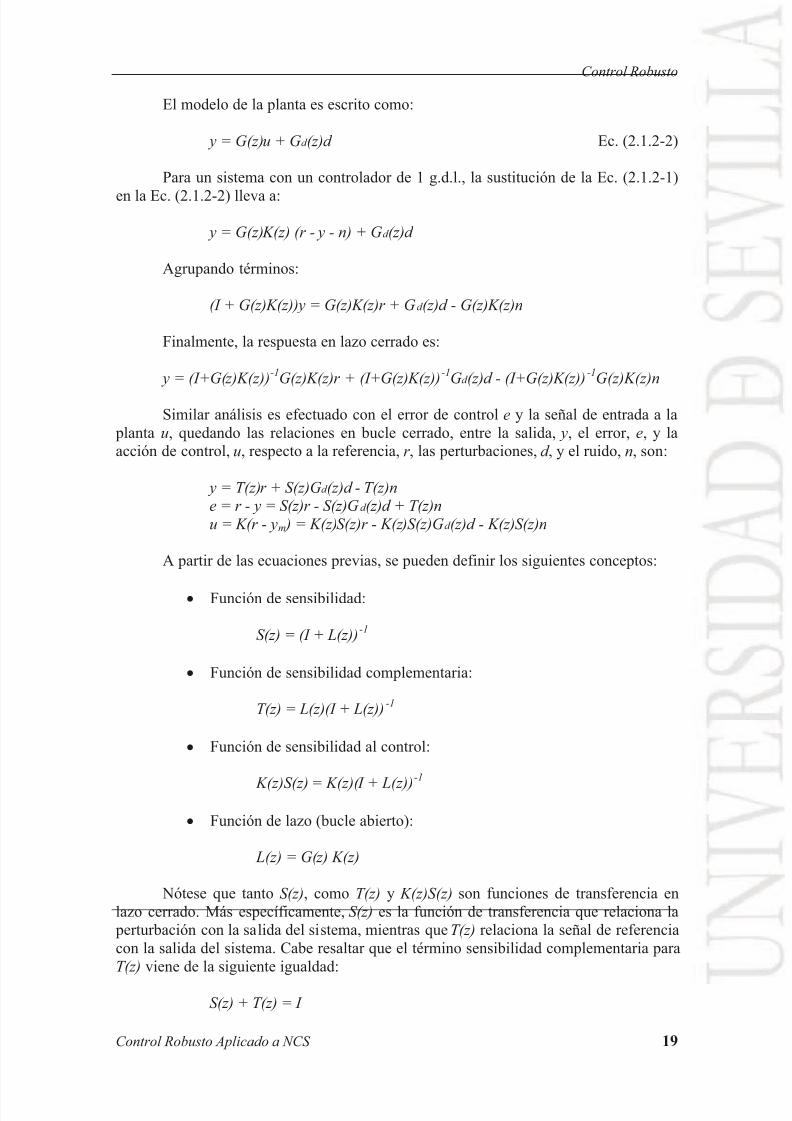
El modelo de la planta es escrito como:
y = G(z)u + Gd (z)d Ec. (2.1.2-2)
Para un sistema con un controlador de 1 g.d.l., la sustitución de la Ec. (2.1.2-1)
en la Ec. (2.1.2-2) lleva a:
y = G(z)K(z) (r - y - n) + Gd (z)d
Agrupando términos:
(I + G(z)K(z))y = G(z)K(z)r + Gd (z)d - G(z)K(z)n
Finalmente, la respuesta en lazo cerrado es:
y = (I+G(z)K(z))-1
G(z)K(z)r + (I+G(z)K(z))-1
Gd (z)d - (I+G(z)K(z))-1
G(z)K(z)n
Similar análisis es efectuado con el error de control e y la señal de entrada a la
planta u, quedando las relaciones en bucle cerrado, entre la salida, y, el error, e, y la
acción de control, u, respecto a la referencia, r , las perturbaciones, d , y el ruido, n, son:
y = T(z)r + S(z)Gd (z)d - T(z)ne = r - y = S(z)r - S(z)Gd (z)d + T(z)n
u = K(r - ym ) = K(z)S(z)r - K(z)S(z)Gd (z)d - K(z)S(z)n
A partir de las ecuaciones previas, se pueden definir los siguientes conceptos:
Función de sensibilidad:
S(z) = (I + L(z))-1
Función de sensibilidad complementaria:
T(z) = L(z)(I + L(z))-1
Función de sensibilidad al control:
K(z)S(z) = K(z)(I + L(z))-1
Función de lazo (bucle abierto):
L(z) = G(z) K(z)
Nótese que tanto S(z), como T(z) y K(z)S(z) son funciones de transferencia en
lazo cerrado. Más específicamente, S(z) es la función de transferencia que relaciona la
perturbación con la salida del sistema, mientras que T(z) relaciona la señal de referencia
con la salida del sistema. Cabe resaltar que el término sensibilidad complementaria para
T(z) viene de la siguiente igualdad:
S(z) + T(z) = I

7/26/2019 2.Capitulo 2 - Control Robusto Aplicado a NCS
http://slidepdf.com/reader/full/2capitulo-2-control-robusto-aplicado-a-ncs 8/16
Control Robusto
Control Robusto Aplicado a NCS 20
Por tanto, un decremento de S(z) ha de ser a costa de un incremento de T(z), yviceversa. Si lo que se pretende es diseñar un controlador que minimice S(z), lo cual
sería equivalente a establecer una condición de seguimiento, se conseguirá a cambio de
un incremento de T(z), o lo que es lo mismo a cambio de aumentar la señal de control.
Minimizar S(z) se puede entender como minimizar la norma infinita de su respuesta
frecuencial, que sería como diseñar pensando en la frecuencia a la cual hay un mayorerror de seguimiento. Por otro lado, un valor elevado de T(z) puede ser causa de
inestabilidad, debido al efecto en el lazo cerrado de la incertidumbre.
El esquema general de control para un controlador robusto, incluyendo las
funciones de ponderación, es el siguiente:
Figura 2.1.2-2: Esquema general de control robusto con sensibilidad mixta
Se puede apreciar cómo se ponderan simultáneamente las funciones de
sensibilidad S(z), sensibilidad al control K(z)S(z) y sensibilidad complementaria T(z), siendo las funciones de ponderación que se utilizan Ws(z), Wks(z) y Wt(z) respectivamente.
El objetivo del control mixto H2/H∞ es el de calcular un controlador K(z) que
atenúe la relación entre la energía del vector objetivo, z , y la del vector de
perturbaciones, ω, siendo γ y ν la atenuación conseguida para las normas H2 y H∞,
respectivamente.
La síntesis del controlador, de acuerdo a lo presentado en Ortega (2001), se
realiza siguiendo los pasos que se describen a continuación
7/26/2019 2.Capitulo 2 - Control Robusto Aplicado a NCS
http://slidepdf.com/reader/full/2capitulo-2-control-robusto-aplicado-a-ncs 9/16
Control Robusto
Control Robusto Aplicado a NCS 21
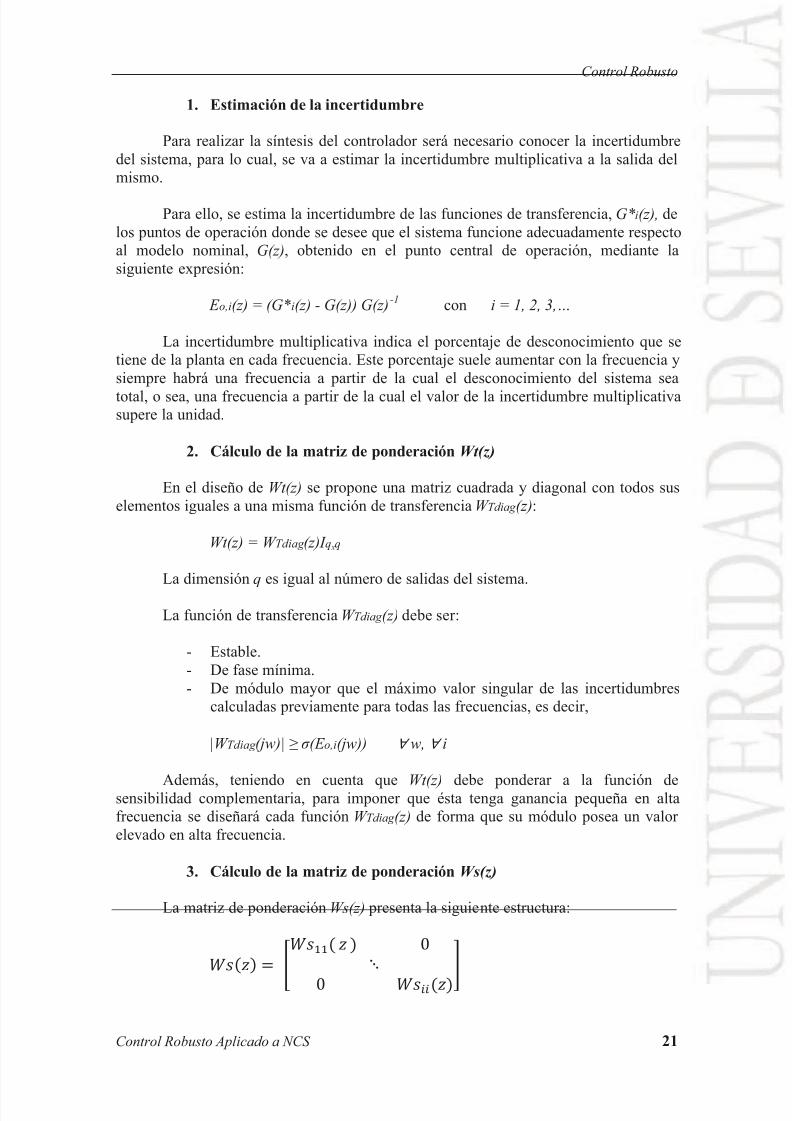
1. Estimación de la incertidumbre
Para realizar la síntesis del controlador será necesario conocer la incertidumbre
del sistema, para lo cual, se va a estimar la incertidumbre multiplicativa a la salida del
mismo.
Para ello, se estima la incertidumbre de las funciones de transferencia, G*i(z), de
los puntos de operación donde se desee que el sistema funcione adecuadamente respecto
al modelo nominal, G(z), obtenido en el punto central de operación, mediante la
siguiente expresión:
E o,i(z) = (G*i(z) - G(z)) G(z)-1
con i = 1, 2, 3,…
La incertidumbre multiplicativa indica el porcentaje de desconocimiento que se
tiene de la planta en cada frecuencia. Este porcentaje suele aumentar con la frecuencia y
siempre habrá una frecuencia a partir de la cual el desconocimiento del sistema sea
total, o sea, una frecuencia a partir de la cual el valor de la incertidumbre multiplicativasupere la unidad.
2. Cálculo de la matriz de ponderación Wt(z)
En el diseño de Wt(z) se propone una matriz cuadrada y diagonal con todos sus
elementos iguales a una misma función de transferencia W Tdiag (z):
Wt(z) = W Tdiag (z)I q xq
La dimensión q es igual al número de salidas del sistema.
La función de transferencia W Tdiag (z) debe ser:
-
Estable.
- De fase mínima.
- De módulo mayor que el máximo valor singular de las incertidumbres
calculadas previamente para todas las frecuencias, es decir,
|W Tdiag (jw)| ≥ σ (E o,i(jw)) w, i
Además, teniendo en cuenta que Wt(z) debe ponderar a la función desensibilidad complementaria, para imponer que ésta tenga ganancia pequeña en alta
frecuencia se diseñará cada función W Tdiag (z) de forma que su módulo posea un valor
elevado en alta frecuencia.
3. Cálculo de la matriz de ponderación Ws(z)
La matriz de ponderación Ws(z) presenta la siguiente estructura:
7/26/2019 2.Capitulo 2 - Control Robusto Aplicado a NCS
http://slidepdf.com/reader/full/2capitulo-2-control-robusto-aplicado-a-ncs 10/16
Control Robusto
Control Robusto Aplicado a NCS 22
Por lo que se trata de una matriz de funciones de transferencia cuadrada y
diagonal de dimensión q igual al número de salidas del sistema.
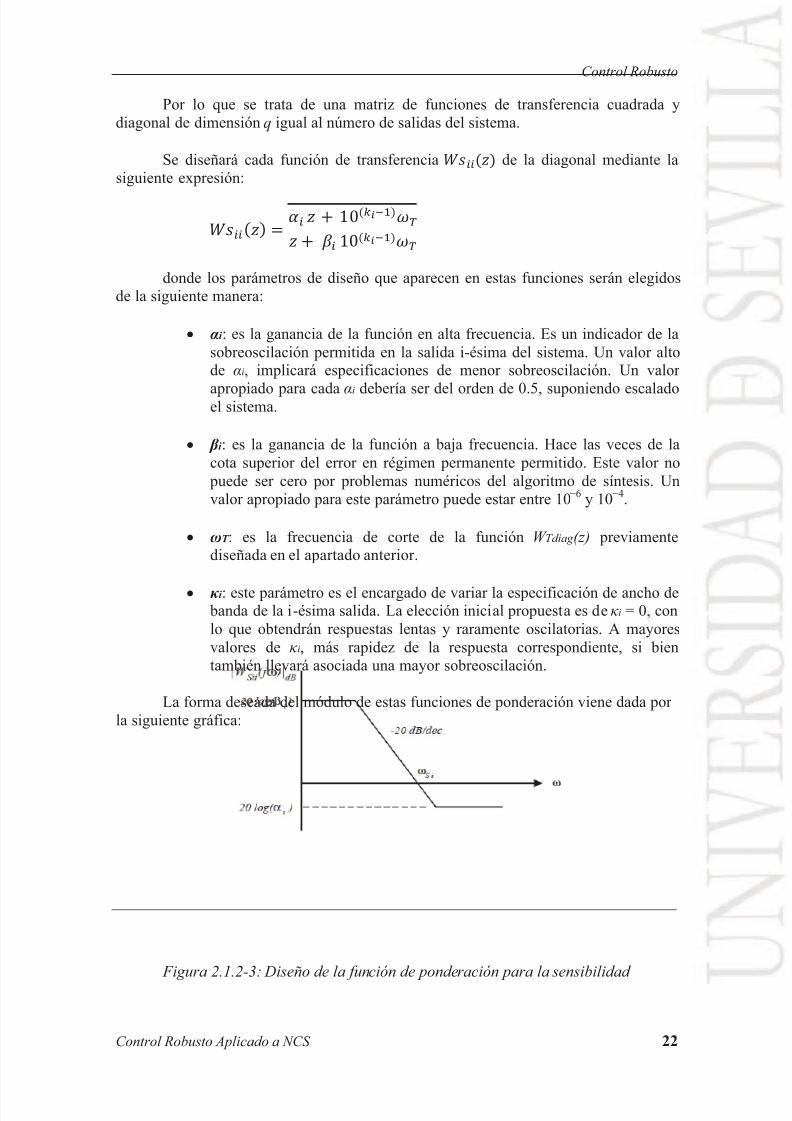
Se diseñará cada función de transferencia de la diagonal mediante la
siguiente expresión:
donde los parámetros de diseño que aparecen en estas funciones serán elegidos
de la siguiente manera:
αi : es la ganancia de la función en alta frecuencia. Es un indicador de la
sobreoscilación permitida en la salida i-ésima del sistema. Un valor altode αi, implicará especificaciones de menor sobreoscilación. Un valor
apropiado para cada αi debería ser del orden de 0.5, suponiendo escaladoel sistema.
β i : es la ganancia de la función a baja frecuencia. Hace las veces de la
cota superior del error en régimen permanente permitido. Este valor no
puede ser cero por problemas numéricos del algoritmo de síntesis. Un
valor apropiado para este parámetro puede estar entre 10−6 y 10−4.
ωT : es la frecuencia de corte de la función W Tdiag (z) previamentediseñada en el apartado anterior.
κ i : este parámetro es el encargado de variar la especificación de ancho de banda de la i-ésima salida. La elección inicial propuesta es de κ i = 0, con
lo que obtendrán respuestas lentas y raramente oscilatorias. A mayores
valores de κ i, más rapidez de la respuesta correspondiente, si bien
también llevará asociada una mayor sobreoscilación.
La forma deseada del módulo de estas funciones de ponderación viene dada por
la siguiente gráfica:
Figura 2.1.2-3: Diseño de la función de ponderación para la sensibilidad

7/26/2019 2.Capitulo 2 - Control Robusto Aplicado a NCS
http://slidepdf.com/reader/full/2capitulo-2-control-robusto-aplicado-a-ncs 11/16
Control Robusto
Control Robusto Aplicado a NCS 23
4. Diseño de la función de ponderación Wks(z)
La función Wks(z) pondera a la función de sensibilidad al control, función que
relaciona la referencia y perturbaciones con la actuación que proporciona el controlador.
Por tanto, con esta función se penaliza a la señal de control en el rango de frecuencia
deseado. Al penalizar a la señal de control se pretende disminuir la sobreoscilación sinafectar negativamente a los tiempos de subida.
Para el diseño de esta función de ponderación se utiliza el siguiente método:
-
Inicialmente se elige la matriz de funciones de ponderación Wks(z) constante
e igual a la matriz identidad, es decir:
Wks(z) = I m xm
donde m es el número de entradas del sistema.
El controlador obtenido con esta función se implementa y se analiza la
respuesta temporal que se obtenga ante entrada escalón, a partir de la cual, se
estima la frecuencia de oscilación de la misma. Para ello, se mide el tiempo
T transcurrido entre el primer pico de subida y el primer pico de bajada. A
partir de este tiempo, a la frecuencia de oscilación se le denominará ωd :
- A partir de este semiperiodo se rediseña la matriz Wks(z) de forma que sea
diagonal, y que su módulo aumente en torno a esa frecuencia:
Esta expresión es la de un filtro paso banda centrado en ωd , con ganancia
unitaria tanto en baja como en alta frecuencia y cuya anchura de banda es
función del parámetro ρ. El valor de este parámetro se tomará en torno a 3,
siendo mayor la anchura de la banda a medida que dicho valor aumenta.
- En un principio se tomará ρ = 3, pero opcionalmente se puede variar el valor
de este parámetro en función de los resultados obtenidos para lograr una
mejor respuesta.
5. Construcción de la planta aumentada P(z)
Para la creación de la planta aumentada se utiliza la función sysic contenida
en el µ-Analysis and Synthesis Toolbox de Matlab. A esta función se le debe
proporcionar la especificación de los subsistemas existentes y las interconexiones
entre ellos. La salida de esta función es la planta aumentada.

7/26/2019 2.Capitulo 2 - Control Robusto Aplicado a NCS
http://slidepdf.com/reader/full/2capitulo-2-control-robusto-aplicado-a-ncs 12/16
Control Robusto
Control Robusto Aplicado a NCS 24
6. Síntesis del controlador K(z)
Para la síntesis del controlador se pueden utilizar las funciones hinfsyn,
h2syn o hinfmix, dependiendo de si lo que se pretende resolver es un problema de
norma H∞, norma H2 o norma mixta H2/H∞, respectivamente. Estas funciones están
contenidas en el µ-Analysis and Synthesis Toolbox de Matlab. Para el caso de lafunción hinfsyn, se le deben proporcionar los siguientes parámetros:
-
Planta aumentada
- Número de entradas del controlador
-
Número de salidas del controlador
- Gamma máxima
-
Gamma mínima
- Tolerancia
En el caso de la función h2syn solo serán necesarios los tres primeros
parámetros de los que se acaban de listar, mientras que para usar la función hinfmix,se deben asignar los distintos pesos a las normas H2 y H∞.
La salida de estas funciones proporciona un controlador que cumple con las
especificaciones dadas.
2.1.3. Controlador Robusto de 2 g.d.l.
Cuando se trata con control robusto en NCS, el esquema de control de 1 g.d.l.
tratado en apartados anteriores no responde correctamente ante los problemas que, en
este caso, provienen de dos fuentes distintas: las incertidumbres del modelo y losinconvenientes provocados por la red de comunicación. Como resultado, los objetivos
de control antes mencionados no pueden ser alcanzados simultáneamente con un único
controlador de realimentación. Es por ello, que sea necesario tratar las incertidumbres
procedentes de la red mediante un controlador específico, mientras que para la
atenuación de las perturbaciones y errores que afectan al modelo de la planta, se
requiere el uso del controlador de realimentación ya visto anteriormente.
Figura 2.1.3-1: Esquema de control NCS robusto con controlador de 2 g.d.l.

7/26/2019 2.Capitulo 2 - Control Robusto Aplicado a NCS
http://slidepdf.com/reader/full/2capitulo-2-control-robusto-aplicado-a-ncs 13/16
Definición del problema
Control Robusto Aplicado a NCS 25
La solución, por tanto, es usar un controlador de dos grados de libertad (2 g.d.l.).
De esta forma, el controlador es dividido en dos bloques como se muestra en la Fig.
2.1.3-1, donde K 1(z) denota la parte de realimentación del controlador y K 2(z) maneja la
señal procedente de la red de comunicación. El controlador de realimentación, K 1(z), es
usado para reducir el efecto de las incertidumbres (perturbaciones y errores del modelo)
mientras que el controlador K 2(z) es diseñado para mejorar los problemas derivados dela red de comunicación.
2.2. Definición del problema
Mediante la recopilación de los conceptos vistos en apartados anteriores, se
puede proceder a definir el problema general de control robusto aplicado a NCS.
Previamente a la formulación del problema, se establecen los principales
problemas que afectan al sistema de control, así como una serie de definiciones y
teoremas necesarios.
2.2.1. Problemas principales
El objetivo de este trabajo consiste en diseñar un controlador robusto, aplicado a
NCS, que estabilice el sistema sujeto a dos problemas principales: las incertidumbres en
el modelo de la planta, en forma de perturbaciones y errores de modelado, y los
inconvenientes ocasionados por la red de comunicación, ya presentados en el capítulo
anterior.
2.2.1.1. Incertidumbres en el modelo de la planta
En la Fig. 2.2.1.1-1 se pueden apreciar las incertidumbres multiplicativas que se
consideran para el modelo de la planta, las cuales vienen definidas mediante la siguiente
ecuación:
G*(z) = G(z)(I +W I (z) Δ(z))
donde G*(z) representa todas las plantas posibles, G(z) es la planta nominal y
W I (z)Δ(z) es la incertidumbre multiplicativa, con ||Δ(z)||∞ < 1.
Figura 2.2.1.1-1: Esquema de control con incertidumbres en el modelo

7/26/2019 2.Capitulo 2 - Control Robusto Aplicado a NCS
http://slidepdf.com/reader/full/2capitulo-2-control-robusto-aplicado-a-ncs 14/16
Definición del problema
Control Robusto Aplicado a NCS 26
2.2.1.2. Pérdida de datos debida a la red de comunicación
En la Fig. 2.2.1.2-1 se puede apreciar el modelado de la pérdida de datos en el
canal de comunicación, d r , el cual se define como la relación existente entre la entrada
del canal, v, y la salida del canal, w, según la siguiente ecuación:
w(k) = (1 - d r (k)) v(k) con d r ϵ {0, 1} y k ϵ N 0.
Figura 2.2.1.2-1: Esquema de control con modelo real de la red de comunicación
2.2.2. Definiciones y Teoremas
Se introducirán a continuación, Silva et al. (2009) y Ling and Lemmon (2004),
dos conceptos, estabilidad en media cuadrática y teorema de equivalencia, cuyo uso
permitirá obtener un modelo equivalente para la red de comunicación mostrada en la
Fig. 2.2.1.2-1, permitiendo así aplicar las técnicas de control estudiadas anteriormente.
2.2.2.1. Definición: Estabilidad en Media Cuadrática
Considere un sistema descrito por x(k+1) = f (x(k), w(k)), donde k ϵ N 0 , f: Rn ×
Rm R
n , x(k) ϵ Rn es el estado del sistema en el instante de tiempo k , x(0) = x0, donde
x0 es una variable aleatoria de segundo orden, y la entrada w es un proceso estacionario
de segundo orden independiente del estado inicial x0.
Un sistema tiene Estabilidad en Media Cuadrática, también conocida como
Mean Square Stability (en adelante, MSS) si, y sólo si, existen los valores finitos μ ϵ Rn
y M ϵ Rn×n
, M ≥ 0, tal que se cumple, independientemente del estado inicial x0:
2.2.2.2. Teorema: Equivalencia
Considere el esquema de control representado en la Fig. 2.2.2.2-1, donde se presenta un
modelo equivalente para definir la red de comunicación, en el cual se supone que P ϵ (0,
1) y que se cumplen los Supuestos 1 y 2 de Silva et al. (2009).
7/26/2019 2.Capitulo 2 - Control Robusto Aplicado a NCS
http://slidepdf.com/reader/full/2capitulo-2-control-robusto-aplicado-a-ncs 15/16
Definición del problema
Control Robusto Aplicado a NCS 27
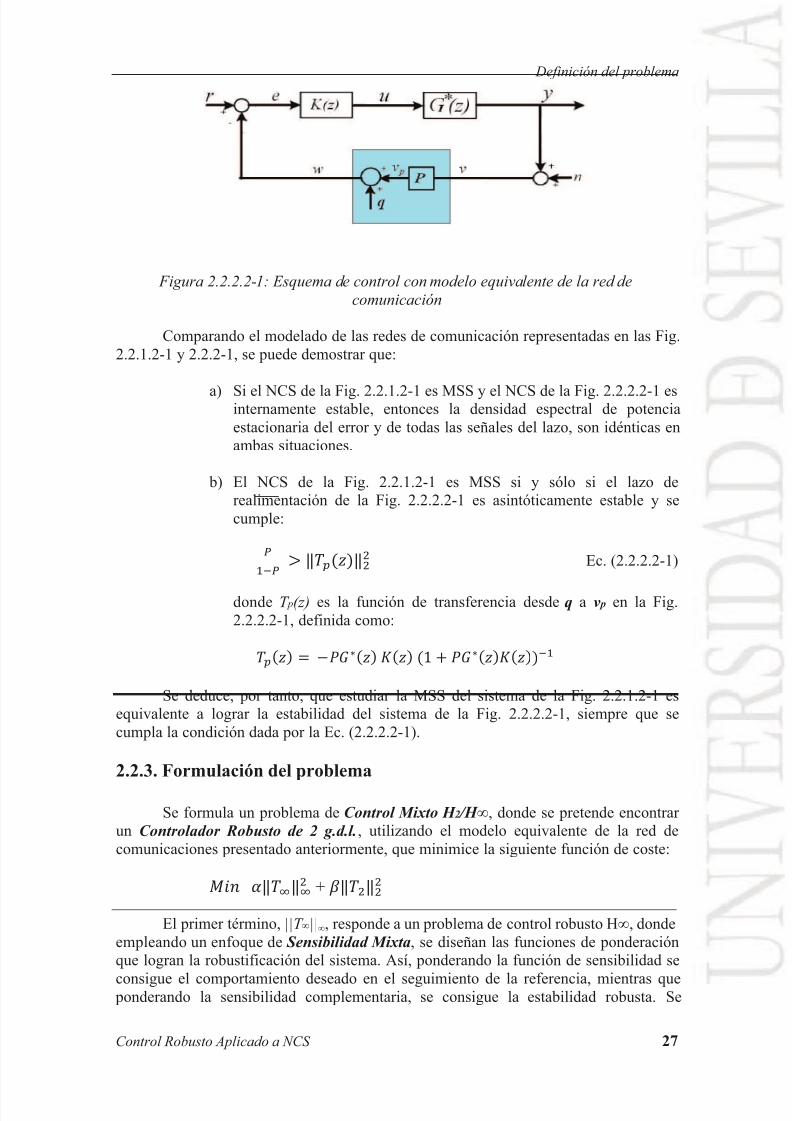
Figura 2.2.2.2-1: Esquema de control con modelo equivalente de la red de
comunicación
Comparando el modelado de las redes de comunicación representadas en las Fig.
2.2.1.2-1 y 2.2.2-1, se puede demostrar que:
a)
Si el NCS de la Fig. 2.2.1.2-1 es MSS y el NCS de la Fig. 2.2.2.2-1 esinternamente estable, entonces la densidad espectral de potencia
estacionaria del error y de todas las señales del lazo, son idénticas en
ambas situaciones.
b) El NCS de la Fig. 2.2.1.2-1 es MSS si y sólo si el lazo de
realimentación de la Fig. 2.2.2.2-1 es asintóticamente estable y se
cumple:
Ec. (2.2.2.2-1)
donde T p(z) es la función de transferencia desde q a v p en la Fig.
2.2.2.2-1, definida como:
Se deduce, por tanto, que estudiar la MSS del sistema de la Fig. 2.2.1.2-1 es
equivalente a lograr la estabilidad del sistema de la Fig. 2.2.2.2-1, siempre que se
cumpla la condición dada por la Ec. (2.2.2.2-1).
2.2.3. Formulación del problema
Se formula un problema de Control Mixto H 2 / H∞, donde se pretende encontrar
un Controlador Robusto de 2 g.d.l., utilizando el modelo equivalente de la red de
comunicaciones presentado anteriormente, que minimice la siguiente función de coste:
+
El primer término, ||T ∞||∞, responde a un problema de control robusto H∞, donde
empleando un enfoque de Sensibilidad Mixta, se diseñan las funciones de ponderación
que logran la robustificación del sistema. Así, ponderando la función de sensibilidad se
consigue el comportamiento deseado en el seguimiento de la referencia, mientras que ponderando la sensibilidad complementaria, se consigue la estabilidad robusta. Se

7/26/2019 2.Capitulo 2 - Control Robusto Aplicado a NCS
http://slidepdf.com/reader/full/2capitulo-2-control-robusto-aplicado-a-ncs 16/16
Conclusiones
Control Robusto Aplicado a NCS 28
deberá proporcionar un mayor valor al parámetro α frente a β (priorizando la
minimización de la norma H∞ de T∞(z)) en caso de dar prioridad al rendimiento y
robustez frente a ruidos e incertidumbres.
El segundo término, ||T 2||2, se corresponde con ||T p(z)||2, y responde a un
problema de control H2, que permite encontrar la probabilidad mínima de éxito ( P ) quedebe cumplir la pérdida de datos en la transmisión de forma que satisfaga la condición
dada por la Ec. (2.2.2.2-1), la cual permite trabajar con el modelo NCS equivalente de la
Fig. 2.2.2.2-1. Si la prioridad es lograr la mínima probabilidad P posible, se debe
obtener un controlador que proporcione una norma H 2 de T 2(z) muy cerca de su mínimo,
esto es, el parámetro β debe ser mayor que α.
2.3. Conclusiones
En este capítulo se han presentado las bases sobre las que se sostiene la Teoría
del Control Robusto, las cuales han dado paso a la introducción de esta técnica decontrol en el campo de los NCS. Así, se confiere una serie de propiedades que permiten
dar una mayor fiabilidad a este tipo de sistemas ante las incertidumbres provenientes de
la red de comunicación usada, así como las achacables a las propias incertidumbres del
modelo de la planta, dadas por los propios errores en el modelado y las perturbaciones
que le afectan.
Los conceptos de Control Mixto H 2 /H ∞, Sensibilidad Mixta y Controlador
Robusto de 2 g.d.l., junto con el concepto de Mean Square Stability y el Teorema de Equivalencia, han proporcionado un esquema de control robusto equivalente para los
sistemas NCS.
De esta forma, una vez realizada la formulación del problema que se pretende
resolver mediante este trabajo, se exponen en el siguiente capítulo las soluciones
necesarias vía implementación de distintas estrategias de control robusto aplicadas al
control de sistemas a través de redes.