2d oculomotor plant mathematical model for eye movement simulation sampath jayarathna and oleg v....
TRANSCRIPT
2D Oculomotor Plant Mathematical Model for Eye Movement Simulation
Sampath Jayarathna and Oleg V. Komogortsev
Human Computer Interaction LaboratoryDepartment of Computer Science
Texas State University – San Marcos

Motivation
Accurate eye movement prediction will increase the responsiveness of every system that uses eye-gaze-based commands.
As an example, prediction of fast eye movement (saccade) will allow placing system’s response to the area targeted by a saccade, anticipating a user’s intentions.

Objectives
The main objective of this research is to extend the work proposed by horizontal 2DOPMM by designing a framework that predicts an eye movement trajectory in any direction within a specified time interval, detects saccades, provides an eye position signal during periods when the eye tracking fails, and has a real-time performance.

Proposed Contribution
1. An eye mechanical model that is capable of generating saccades that start from any direction of eye position and progress in any direction in Listing’s plane.
2. The representation of the eye mechanical model in a Kalman Filter form.
This representation enables continuous real-time eye movement prediction.

Previous Work
• Our model grows from the horizontal OPMM by addition of two extraocular muscles (superior/inferior rectus) and allowing vertical eye movements.
• The horizontal OPMM accounts for individual anatomical components (passive elasticity, viscosity, eye-globe rotational inertia, muscle active state tension, length tension characteristics, force velocity relationship) and considers each extraocular muscle separately, therefore allowing estimation of individual extraocular muscle force values.

Previous Work…
• When compared to three-dimensional models, our model accounts for individual anatomical properties of extraocular muscles (lateral, medial, superior, and inferior rectus) and its surroundings stated earlier.

Human Visual System
The eye globe rotates in its socket through the use of six muscles, lateral/medial recti- mainly responsible for horizontal eye movements, superior/inferior recti- mainly responsible for vertical eye movements, superior/inferior oblique – mainly responsible for eye rotation around its primary axis of sight, and vertical eye movements

Human Visual System….
• The brain sends a neuronal control signal to each muscle to direct the muscle to perform its work.
• A neuronal control signal is anatomically implemented as a neuronal discharge that is sent through a nerve to a designated muscle from the brain.
• During an eye movement, movement trajectory can be separated into horizontal and vertical components.
• The neuronal control signal for the horizontal and vertical components is generated by different parts of the brain.

TSR
TLR
TMR
TIR
2D Oculomotor Plant Model
• Our 2D OPMM is driven by the neuronal control signal innervating four extraocular muscles lateral, medial, superior, and inferior recti that induce eye globe movement.
• The 2DOPMM resistive forces are provided by surrounding tissues.

2D Oculomotor Plant Model…….
• Each muscle plays the role of the agonist or the antagonist.
• The agonist muscle contracts and pulls the eye globe in the required direction and the antagonist muscle stretches and resists the pull [2].
• This research discusses in detail only Right Upward and Left Downward movements as examples, but the model can be modified to simulate eye globe movements in all directions.
2D Oculomotor Plant Model…….
• Evoked by muscle movements, an eye can move in 8 different directions:
Right HorizontalLeft HorizontalTop VerticalBottom VerticalRight UpwardLeft UpwardRight DownwardLeft Downward

TSR
TLR
TMR
TIR
QLR Q
MR
QSR
QIR
Change of muscle forces at Right Upward eye movement

Right Upward Eye movement
When eye moves to a particular position from the coordination position (0,0) as one of eight basic movement types listed above, each muscle connected to the eye globe contract or stretch accordingly.
Lateral Rectus - ?Medial Rectus - ?Superior Rectus - ?Inferior Rectus - ?

Right Upward Eye movement…..
Rotations of each muscle because of the horizontal and vertical displacement of the eye from its origin ΘHR and ΘVR , makes a rotation angle with respective to each of muscle connected to the eye globe,
by lateral rectus, superior rectus, medial rectus and inferior rectus ΘLR, ΘSR, ΘMR, ΘIR respectively.

Right Upward eye movement…..
When human eye rotates to a new target axis due to visual stimuli, each eye muscle is innervated by a neuronal control signal producing necessary muscle forces for each eye globe rotation with required direction and magnitude.
By computing muscle forces as Horizontal Right, Horizontal Left, Vertical Top and Vertical Bottom, these forces can be defined based on muscle properties, and also later will allow to compute individual extraocular muscle forces.
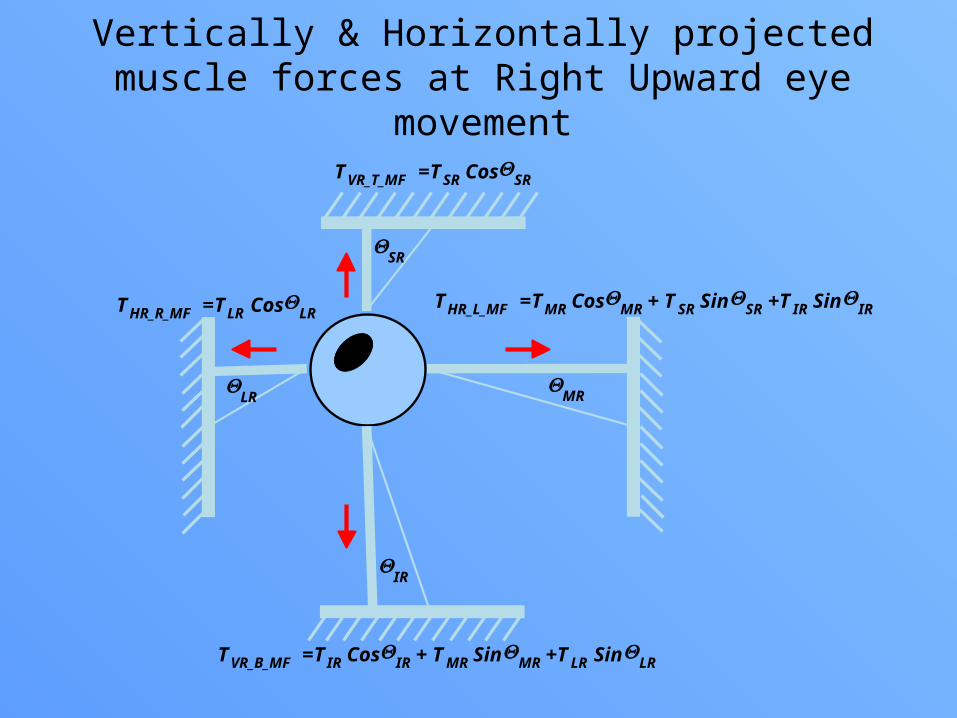
Vertically & Horizontally projected muscle forces at Right Upward eye movement
TVR_T_MF =TSR CosQSR
THR_R_MF =TLR CosQLRTHR_L_MF =TMR CosQMR + TSR SinQ
SR +TIR SinQIR
TVR_B_MF =TIR CosQIR + TMR SinQMR +TLR SinQ
LR
QLR
QSR
QMR
QIR

Right Upward eye movement…..
When mapped to the horizontal and vertical planes, each extraocular muscle provides a projection of its force. Those projections are directed according to original 2D movements, therefore creating 4 equations of forces in horizontal and vertical planes:
Horizontal Right Muscle Force (THR_R_MF) : TLRCosΘLR
Horizontal Left Muscle Force (THR_L_MF) : TMRCosΘMR +
TSRSinΘSR+ TIRSinΘIR
Vertical Top Muscle Force (TVR_T_MF) : TSRCosΘSR
Vertical Bottom Muscle Force (TVR_B_MF) : TIRCosΘIR + TMRSinΘMR
+ TLRSinΘLR
Individual Muscle Properties
• Detailed computation of muscle forces requires accurate modeling of each component inside of an extraocular muscle.
• These components are passive elasticity, an active state tension, series elasticity, a length tension component and a force velocity relationship.
• Combined these components creates a Muscle Mechanical Model (MMM).

Individual Muscle Properties…..
Passive Elasticity: Each body muscle in the rest state is elastic. The rested muscle can be stretched by applying force, the extension being proportional to the force applied. The passive muscle component is non-linear, but in this paper it is modeled as an ideal linear spring.
Active State Tension: If stimulated by a single wave of neurons, a muscle twitches then relaxes. A muscle goes into the tetanic state, when its stimulated by a neurons at a specific frequency continuously [13]. When a tetanic stimulation occurs, a muscle develops tension, trying to contract. The resulting tension is called the active state tension.

Individual Muscle Properties…..
Length Tension Relationship: The tension that a muscle develops as a result of neuronal stimulation partially depends on its length. In this paper the length tension relationship is modeled as an ideal linear spring.
Series Elasticity: The series elasticity is in series with the active force generator, hence the name. In this 2DOPMM, the series elasticity is modeled as an ideal liner spring.
Force Velocity Relationship: This dependency of force upon velocity varies for different levels of neuronal control signal and depends on whether a muscle shortens or being stretched.

Horizontal Right Muscle Force MMM at Fixation
00
QHR_SE_LR
F®
HR_SE_LR
QHR_LT_LR
F®
HR_LT_LR
F®
LR
NLR
THR_R_MF
QHR_LR

Horizontal Right Muscle Force MMM at Fixation
Neuronal control signal NLR creates active tension force FHR_LR that works in parallel with the length-tension force FHR_LT_LR .
Altogether they produce tension that is propagated through the series elasticity components to the eye globe.𝑇ሬԦ𝐻𝑅_𝑅_𝑀𝐹 = 𝐹Ԧ𝐻𝑅_𝐿𝑅+ 𝐹Ԧ𝐻𝑅_𝐿𝑇_𝐿𝑅
𝑇ሬԦ𝐻𝑅_𝑅_𝑀𝐹 = 𝐹Ԧ𝐻𝑅_𝑆𝐸_𝐿𝑅

MMM Scalar Values
Length tension force of lateral rectus is,
where θHR_LT_LR is the displacement of the spring in the horizontal direction and KLT is the spring’s coefficient
The force propagated by the series elasticity component is,
where θHR_SE_LR is the displacement of the spring in the horizontal direction and KSE is the spring’s coefficient.
𝐹Ԧ𝐻𝑅_𝐿𝑇_𝐿𝑅 = 𝐾𝐿𝑇𝜃𝐻𝑅_𝐿𝑇_𝐿𝑅
𝐹Ԧ𝐻𝑅_𝑆𝐸_𝐿𝑅 = 𝐾𝑆𝐸𝜃𝐻𝑅_𝑆𝐸_𝐿𝑅

Horizontal Right muscle force00
+
KSE(QHR_SE_LR + DQHR_SE_LR )CosQLR
KLT(QHR_LT_LR - DQHR_LT_LR )CosQLR
FLR CosQLR
BAGDQ
.
HR_LT_LR CosQLR
DQHR
QHR_SE_LR + DQ
HR_SE_LRQ
HR_LT_LR - DQHR_LT_LR
QHR_LR - DQ
HR_LR
NLR
THR_R_MF

Horizontal Right muscle force…..
In this particular situation, lateral rectus behaves as agonist and hence shows agonist muscle properties with Horizontal Muscle force values.
THR_R_MF = lateral rectus Active State Tension + lateral rectus Length Tension
Component – lateral rectus Damping component
Resisting the contraction, the series elasticity component of the lateral rectus propagates the contractile force by pulling the eye globe with the same force THR_R_MF ,
THR_R_MF = lateral rectus Series Elasticity Component

Horizontal Right muscle force…..
The damping component modeling the force velocity relationship resists the muscle contraction. The amount of resistive force produced by the damping component is based upon the velocity of contraction of the length tension component.
𝑇𝐻𝑅_𝑅_𝑀𝐹 = 𝐹𝐿𝑅𝑐𝑜𝑠𝜃𝐿𝑅+ 𝐾𝐿𝑇൫𝜃𝐻𝑅_𝐿𝑇_𝐿𝑅− ∆𝜃𝐻𝑅_𝐿𝑇_𝐿𝑅൯𝑐𝑜𝑠𝜃𝐿𝑅− 𝐵𝐴𝐺∆𝜃ሶ𝐻𝑅_𝐿𝑇_𝐿𝑅𝑐𝑜𝑠𝜃𝐿𝑅
𝑇𝐻𝑅_𝑅_𝑀𝐹 = 𝐾𝑆𝐸൫𝜃𝐻𝑅_𝑆𝐸_𝐿𝑅+ ∆𝜃𝐻𝑅_𝑆𝐸_𝐿𝑅൯𝑐𝑜𝑠𝜃𝐿𝑅

Horizontal Right muscle force…..
By using previous 2 equations, we can calculate the force THR_R_MF in terms of the eye rotation ∆ΘHR and displacement of the length tension component ∆ΘHR_LT_LR of the muscle.
𝑇𝐻𝑅_𝑅_𝑀𝐹 = 𝐹𝐿𝑅𝐾𝑆𝐸𝐾𝑆𝐸+ 𝐾𝐿𝑇− ∆𝜃𝐻𝑅𝐾𝑆𝐸𝐾𝐿𝑇𝐾𝑆𝐸+ 𝐾𝐿𝑇 − 𝐵𝐴𝐺∆𝜃ሶ𝐻𝑅_𝐿𝑇_𝐿𝑅
𝑇𝐻𝑅_𝑅_𝑀𝐹 = 𝐾𝑆𝐸൫∆𝜃𝐻𝑅_𝐿𝑇_𝐿𝑅− ∆𝜃𝐻𝑅൯

Horizontal Left muscle force
00
+
KSE(QHR_SE_MR + DQHR_SE_MR )CosQMR
KLT(QHR_LT_MR + DQHR_LT_MR )CosQMR
FMR CosQMR
BANTDQ
.
HR_LT_M RCosQMR
DQHR
NMR
THR_L_MF
KLT(QVR_LT_IR + DQVR_LT_IR )SinQ
IR
FIR SinQIR
BANTDQ
.
VR_LT_IR SinQIR
NIR
KLT(QVR_LT_SR - DQVR_LT_SR ) SinQ
SR
FSR SinQSR
BAGDQ
.
VR_LT_VR SinQSR
NSR
KSE(QVR_SE_SR + DQVR_SE_SR )SinQ
SR
KSE(QVR_SE_IR + DQVR_SE_IR )SinQ
IR
QVR_LT_IR + DQ
VR_LT_IRQ
VR_SE_IR + DQVR_SE_IR
QVR_IR +DQ
VR_IR
QVR_LT_SR - DQ
VR_LT_SR
QVR_SR + DQ
VR_SR
QVR_SE_SR + DQ
VR_SE_SR
QHR_LT_MR + DQ
HR_LT_MRQ
HR_SE_MR + DQHR_SE_MR
QHR_MR + DQHR_MR
Medial Rectus - Antagonist
Superior Rectus - Agonist
Inferior Rectus - Antagonist
TVR_T_MF =TSR CosQSR
THR_R_MF =TLR CosQLRTHR_L_MF =TMR CosQMR + TSR SinQ
SR +TIR SinQIR
TVR_B_MF =TIR CosQIR + TMR SinQMR +TLR SinQ
LR
QLR
QSR
QMR
QIR

Horizontal Left muscle force…..
THR_L_MF = TMR + TSR + TIR
Values for the Force component of the superior rectus can be calculated as same way in the previous agonist muscle lateral rectus. Force components for the medial and inferior recti shows similar composition as antagonist muscles.
TMR = - (medial rectus Active State Tension + medial rectus Length Tension
Component + medial rectus Damping component)
TMR = - medial rectus Series Elasticity Component

Horizontal Left muscle force…..
Consider Medial Rectus Antagonist Muscle,
Total Displacement θHR_MR
θHR_MR increases when the eye moves to the right by ∆θHR, making the resulting displacement θHR_MR + ∆θHR
Both length tension and series elasticity components lengthen as a result of the agonist pull.

Horizontal Left muscle force…..
By similar method, we can obtain 2 major equations for the horizontal left muscle force using 6 muscle equations (2 equations for each muscle, medial, superior and inferior rectus).
By using above 2 equations, we can calculate the force THR_L_MF in terms of the eye rotation ∆ΘHR , ∆ΘVR and displacement of the length tension components of the 3 muscles, ∆ΘHR_LT_MR , ∆ΘVR_LT_SR , and ∆ΘVR_LT_IR.𝑇𝐻𝑅_𝐿_𝑀𝐹= −൫𝐹𝑀𝑅+ 𝐹𝐼𝑅+ 𝐹𝑆𝑅൯𝐾𝑆𝐸+ 𝐾𝐿𝑇 𝐾𝑆𝐸− ∆𝜃𝐻𝑅𝐾𝑆𝐸𝐾𝐿𝑇𝐾𝑆𝐸+ 𝐾𝐿𝑇 − 𝐵𝐴𝑁𝑇∆𝜃ሶ𝐻𝑅_𝐿𝑇_𝑀𝑅− 𝐵𝐴𝑁𝑇∆𝜃ሶ𝑉𝑅_𝐿𝑇_𝑀𝑅+ 𝐵𝐴𝐺∆𝜃ሶ𝑉𝑅_𝐿𝑇_𝑆𝑅
𝑇𝐻𝑅_𝐿_𝑀𝐹 = −𝐾𝑆𝐸൫∆𝜃𝐻𝑅− ∆𝜃𝐻𝑅_𝐿𝑇_𝑀𝑅− ∆𝜃𝑉𝑅_𝐿𝑇_𝐼𝑅+ ∆𝜃𝑉𝑅_𝐿𝑇_𝑆𝑅൯

Vertical Top muscle forces
By similar calculations, we can obtain Vertical Top Muscle Force where superior rectus behaves as agonist, with 2 more equations of forces, in terms of the eye rotation ∆ΘVR and displacement of the length tension component ∆ΘVR_LT_SR of the muscle.
𝑇𝑉𝑅_𝑇_𝑀𝐹 = 𝐹𝑆𝑅𝐾𝑆𝐸𝐾𝑆𝐸+ 𝐾𝐿𝑇− ∆𝜃𝑉𝑅𝐾𝑆𝐸𝐾𝐿𝑇𝐾𝑆𝐸+ 𝐾𝐿𝑇 − 𝐵𝐴𝐺∆𝜃ሶ𝐿𝑇_𝑆𝑅
𝑇𝑉𝑅_𝑇_𝑀𝐹 = 𝐾𝑆𝐸൫∆𝜃𝑉𝑅_𝐿𝑇_𝑆𝑅− ∆𝜃𝑉𝑅൯

Vertical Bottom muscle forces
And also, in Vertical Bottom Muscle force, medial rectus and inferior rectus behave as antagonist, and lateral rectus behaves as agonist, by providing 2 muscle force values for the Vertical Bottom muscle force, in terms of the eye rotation ∆ΘHR , ∆ΘVR and displacement of the length tension components of the 3 muscles, ∆ΘHR_LT_MR , ∆ΘHR_LT_LR , and ∆ΘVR_LT_IR.𝑇𝑉𝑅_𝐵_𝑀𝐹= −ቆ
𝐹𝑀𝑅+ 𝐹𝐼𝑅+ 𝐹𝐿𝑅𝐾𝑆𝐸+ 𝐾𝐿𝑇 ቇ𝐾𝑆𝐸− ∆𝜃𝑉𝑅𝐾𝑆𝐸𝐾𝐿𝑇𝐾𝑆𝐸+ 𝐾𝐿𝑇 − 𝐵𝐴𝑁𝑇∆𝜃ሶ𝐻𝑅_𝐿𝑇_𝑀𝑅− 𝐵𝐴𝑁𝑇∆𝜃ሶ𝑉𝑅_𝐿𝑇_𝐼𝑅+ 𝐵𝐴𝐺∆𝜃ሶ𝐻𝑅_𝐿𝑇_𝐿𝑅
𝑇𝑉𝑅_𝐵_𝑀𝐹 = −𝐾𝑆𝐸൫∆𝜃𝑉𝑅− ∆𝜃𝑉𝑅_𝐿𝑇_𝐼𝑅− ∆𝜃𝐻𝑅_𝐿𝑇_𝑀𝑅 + ∆𝜃𝐻𝑅_𝐿𝑇_𝐿𝑅൯

Active State Tension
Active state tension appears as a result of the neuronal control signal send by the brain.
In our 2DOPMM model, the active state tension is a result of a low pass filtering process performed upon the neuronal control signal.
Active state tension dynamics can be represented with the following differential equations at each time interval both in horizontal and vertical planes

Active State Tension…..
For Agonist,
[ _ , _ _ _ ],𝑡𝑠𝑎𝑐 𝑠𝑡𝑎𝑟𝑡 𝑡𝐴𝐺 𝑠𝑎𝑐 𝑝𝑢𝑙𝑠𝑒 𝑠𝑡𝑎𝑟𝑡[ _ _ _ , _ _ 𝑡𝐴𝐺 𝑠𝑎𝑐 𝑝𝑢𝑙𝑠𝑒 𝑠𝑡𝑎𝑟𝑡 𝑡𝐴𝐺 𝑠𝑎𝑐 𝑝𝑢𝑙𝑠𝑒_ ], 𝑒𝑛𝑑[ _ _ _ , _ ]𝑡𝐴𝐺 𝑠𝑎𝑐 𝑝𝑢𝑙𝑠𝑒 𝑒𝑛𝑑 𝑡𝑠𝑎𝑐 𝑒𝑛𝑑For Antagonist
[ _ , _ _ _ ],𝑡𝑠𝑎𝑐 𝑠𝑡𝑎𝑟𝑡 𝑡𝐴𝑁𝑇 𝑠𝑎𝑐 𝑝𝑢𝑙𝑠𝑒 𝑠𝑡𝑎𝑟𝑡[ _ _ _ , _ _ 𝑡𝐴𝑁𝑇 𝑠𝑎𝑐 𝑝𝑢𝑙𝑠𝑒 𝑠𝑡𝑎𝑟𝑡 𝑡𝐴𝑁𝑇 𝑠𝑎𝑐 𝑝𝑢𝑙𝑠𝑒_ ],𝑒𝑛𝑑[ _ _ _ , _ ]𝑡𝐴𝑁𝑇 𝑠𝑎𝑐 𝑝𝑢𝑙𝑠𝑒 𝑒𝑛𝑑 𝑡𝑠𝑎𝑐 𝑒𝑛𝑑

Active State Tension…..
𝐹ሶ𝐿𝑅 ሺ𝑡ሻ= 𝑁𝐿𝑅− 𝐹𝐿𝑅ሺ𝑡ሻ𝜏𝐿𝑅
𝐹ሶ𝑀𝑅 ሺ𝑡ሻ= 𝑁𝑀𝑅 − 𝐹𝑀𝑅ሺ𝑡ሻ𝜏𝑀𝑅
𝐹ሶ𝑆𝑅 ሺ𝑡ሻ= 𝑁𝑆𝑅− 𝐹𝑆𝑅 ሺ𝑡ሻ𝜏𝑆𝑅
𝐹ሶ𝐼𝑅 ሺ𝑡ሻ= 𝑁𝐼𝑅− 𝐹𝐼𝑅ሺ𝑡ሻ𝜏𝐼𝑅
are functions that define the low pass filtering process; they are defined by the activation and deactivation time constants that are selected empirically to match human physiological data

2DOPMM Equations
By HR_R_MF,
By HR_L_MF,
𝐾𝑆𝐸൫∆𝜃𝐻𝑅_𝐿𝑇_𝐿𝑅− ∆𝜃𝐻𝑅൯= 𝐹𝐿𝑅𝐾𝑆𝐸𝐾𝑆𝐸+ 𝐾𝐿𝑇− ∆𝜃𝐻𝑅𝐾𝑆𝐸𝐾𝑆𝐸+ 𝐾𝐿𝑇− 𝐵𝐴𝐺∆𝜃ሶ𝐻𝑅_𝐿𝑇_𝐿𝑅
𝐾𝑆𝐸൫∆𝜃𝐻𝑅 − ∆𝜃𝐻𝑅_𝐿𝑇_𝑀𝑅− ∆𝜃𝑉𝑅_𝐿𝑇_𝐼𝑅+ ∆𝜃𝑉𝑅_𝐿𝑇_𝑆𝑅൯= ൫𝐹𝑀𝑅 + 𝐹𝐼𝑅+ 𝐹𝑆𝑅൯𝐾𝑆𝐸+ 𝐾𝐿𝑇 𝐾𝑆𝐸 + ∆𝜃𝐻𝑅𝐾𝑆𝐸𝐾𝑆𝐸 + 𝐾𝐿𝑇 + 𝐵𝐴𝑁𝑇∆𝜃ሶ𝐻𝑅_𝐿𝑇_𝑀𝑅+ 𝐵𝐴𝑁𝑇∆𝜃ሶ𝑉𝑅_𝐿𝑇_𝐼𝑅− 𝐵𝐴𝐺∆𝜃ሶ𝑉𝑅_𝐿𝑇_𝑆𝑅

2DOPMM Equations…..
By VR_T_MF,
By VR_B_MF,
𝐾𝑆𝐸൫∆𝜃𝑉𝑅_𝐿𝑇_𝑆𝑅− ∆𝜃𝑉𝑅൯= 𝐹𝑆𝑅𝐾𝑆𝐸𝐾𝑆𝐸+ 𝐾𝐿𝑇− ∆𝜃𝑉𝑅𝐾𝑆𝐸𝐾𝑆𝐸+ 𝐾𝐿𝑇− 𝐵𝐴𝐺∆𝜃ሶ𝑉𝑅_𝐿𝑇_𝑆𝑅
𝐾𝑆𝐸൫∆𝜃𝑉𝑅 − ∆𝜃𝑉𝑅_𝐿𝑇_𝐼𝑅− ∆𝜃𝐻𝑅_𝐿𝑇_𝑀𝑅+ ∆𝜃𝐻𝑅_𝐿𝑇_𝐿𝑅൯= ൫𝐹𝑀𝑅+ 𝐹𝐼𝑅+ 𝐹𝐿𝑅൯𝐾𝑆𝐸+ 𝐾𝐿𝑇 𝐾𝑆𝐸+ ∆𝜃𝑉𝑅𝐾𝑆𝐸𝐾𝑆𝐸+ 𝐾𝐿𝑇 + 𝐵𝐴𝑁𝑇∆𝜃ሶ𝐻𝑅_𝐿𝑇_𝑀𝑅+ 𝐵𝐴𝑁𝑇∆𝜃ሶ𝑉𝑅_𝐿𝑇_𝐼𝑅− 𝐵𝐴𝐺∆𝜃ሶ𝐻𝑅_𝐿𝑇_𝐿𝑅

2DOPMM Equations…..
According to Newton’s second law, the sum of all forces acting on the eye globe, equals the acceleration of the eye globe multiplied by the inertia of the eye globe.
We can apply this law to horizontal and vertical component of movement separately.
Bp=0.06 grams/degrees – viscosity of the tissues around the eye globe. Kp - passive elastic forces.
𝐽∆𝜃ሷ𝐻𝑅 = 𝑇𝐻𝑅_𝑅_𝑀𝐹− 𝑇𝐻𝑅_𝐿_𝑀𝐹− 𝐾𝑝∆𝜃𝐻𝑅− 𝐵𝑝∆𝜃ሶ𝐻𝑅
𝐽∆𝜃ሷ𝑉𝑅 = 𝑇𝑉𝑅_𝑇_𝑀𝐹− 𝑇𝑉𝑅_𝐵_𝑀𝐹− 𝐾𝑝∆𝜃𝑉𝑅− 𝐵𝑝∆𝜃ሶ𝑉𝑅

Eye globe inertia, viscosity, and passive elasticity
00
+
DQHR
THR_R_MFTHR_L_MF
J
BPDQ
·
HR_
KPDQ
HR
00
+
DQVR
TVR_T_MFTVR_B_MF
J
BPDQ
·
VR
KPDQ
VR

2DOPMM Equations…..
𝐽∆𝜃ሷ𝐻𝑅 = 𝑇𝐻𝑅_𝑅_𝑀𝐹− 𝑇𝐻𝑅_𝐿_𝑀𝐹− 𝐾𝑝∆𝜃𝐻𝑅− 𝐵𝑝∆𝜃ሶ𝐻𝑅
𝐽∆𝜃ሷ𝑉𝑅 = 𝑇𝑉𝑅_𝑇_𝑀𝐹− 𝑇𝑉𝑅_𝐵_𝑀𝐹− 𝐾𝑝∆𝜃𝑉𝑅− 𝐵𝑝∆𝜃ሶ𝑉𝑅
𝐽∆𝜃ሷ𝐻𝑅 = 𝐾𝑆𝐸൫∆𝜃𝐻𝑅_𝐿𝑇_𝐿𝑅− ∆𝜃𝐻𝑅൯− 𝐾𝑆𝐸൫∆𝜃𝐻𝑅− ∆𝜃𝐻𝑅_𝐿𝑇_𝑀𝑅− ∆𝜃𝑉𝑅_𝐿𝑇_𝐼𝑅+ ∆𝜃𝑉𝑅_𝐿𝑇_𝑆𝑅൯− 𝐾𝑝∆𝜃𝐻𝑅 − 𝐵𝑝∆𝜃ሶ𝐻𝑅
𝐽∆𝜃ሷ𝑉𝑅 = 𝐾𝑆𝐸൫∆𝜃𝑉𝑅_𝐿𝑇_𝑆𝑅− ∆𝜃𝑉𝑅൯− 𝐾𝑆𝐸൫∆𝜃𝑉𝑅 − ∆𝜃𝑉𝑅_𝐿𝑇_𝐼𝑅− ∆𝜃𝐻𝑅_𝐿𝑇_𝑀𝑅+ ∆𝜃𝐻𝑅_𝐿𝑇_𝐿𝑅൯− 𝐾𝑝∆𝜃𝑉𝑅 − 𝐵𝑝∆𝜃ሶ𝑉𝑅
2DOPMM Equations…..
The dynamics of the Right Upward eye movement can be described through a set of equations responsible for the vertical component of the movement and the horizontal component of the movement.
We can add 2 more equations by,
Position derivative equals velocity of movement.
∆𝜃ሶ𝐻𝑅 = ∆𝜃ሶ𝐻𝑅 ∆𝜃ሶ𝑉𝑅 = ∆𝜃ሶ𝑉𝑅

2DOPMM Equations…..
We described horizontal components of the movement by six differential equations, and vertical components of the movement by another six differential equations to a total of 12 differential equations with 12 unknown variables.
𝑥1ሺ𝑘ሻ= ∆𝜃𝐻𝑅 - Horizontal eye rotation 𝑥2(𝑘) = ∆𝜃𝑉𝑅 – Vertical eye rotation 𝑥3(𝑘) = ∆𝜃𝐻𝑅_𝐿𝑇_𝐿𝑅 - Horizontal displacement of the length tension component for the lateral rectus as a result of ∆𝜃𝐻𝑅 rotation. 𝑥4(𝑘) = ∆𝜃𝐻𝑅_𝐿𝑇_𝑀𝑅, - Horizontal displacement of the length tension component for the medial rectus as a result of ∆𝜃𝐻𝑅 rotation. 𝑥5(𝑘) = ∆𝜃𝑉𝑅_𝐿𝑇_𝑆𝑅 – Vertical displacement of the length tension component for the superior rectus as a result of ∆𝜃𝑉𝑅 rotation. 𝑥6(𝑘) = ∆𝜃𝑉𝑅_𝐿𝑇_𝐼𝑅 – Vertical displacement of the length tension component for the inferior rectus as a result of ∆𝜃𝑉𝑅 rotation. 𝑥7(𝑘) = ∆𝜃ሶ𝐻𝑅 - Horizontal eye velocity 𝑥8(𝑘) = ∆𝜃ሶ𝑉𝑅 - Vertical eye velocity 𝑥9(𝑘) = 𝐹𝐿𝑅 - Lateral rectus active state tension 𝑥10(𝑘) = 𝐹𝑀𝑅 – Medial rectus active state tension 𝑥11(𝑘) = 𝐹𝑆𝑅 - Superior rectus active state tension 𝑥12(𝑘) = 𝐹𝐼𝑅 - Inferior rectus active state tension 𝑥13ሺ𝑘ሻ= 𝑥4ሺ𝑘ሻ+ 𝑥6(𝑘)
Results – OPMM Equations
These 12 differential equations can be presented in a matrix form,
x· = Ax +u
where, x, x· and u are 1x12 vectors, A is a square 12x12 matrix. Above equation, completely describes the oculomotor plant mechanical model during saccades of the Right Upward eye movement.

Results – OPMM Equations
The form of the equation gives us the opportunity to present the oculomotor plant model in Kalman filter form,
therefore provide us with an ability to incorporate the 2DOPMM in a real-time online system with direct eye gaze input as a reliable and robust eye movement prediction tool, therefore providing compensation for detection/transmission delays.

2DOPMM Kalman Filter Framework
kkkkk uBxAx ˆˆ 1
𝑥𝑘 = ሾ𝑥1ሺ𝑘ሻ 𝑥2ሺ𝑘ሻ 𝑥3ሺ𝑘ሻ 𝑥4ሺ𝑘ሻ 𝑥5ሺ𝑘ሻ 𝑥6ሺ𝑘ሻ 𝑥7ሺ𝑘ሻ 𝑥8ሺ𝑘ሻ 𝑥9ሺ𝑘ሻ 𝑥10ሺ𝑘ሻ 𝑥11ሺ𝑘ሻ 𝑥12ሺ𝑘ሻሿ

Conclusion
• Eye mathematical modeling can be used to advance such fast growing areas of research as medicine, HCI, and software usability.
• Our model, 2DOPMM is capable of generating eye movement trajectories with both vertical and horizontal components during fast eye movements (saccades) given the coordinates of the onset point, the direction of movement, and the value of the saccade amplitude

Conclusion
• The important contribution of the proposed model to the field of bioengineering is the ability to compute individual extraocular muscle forces during a saccade.
• Our model evolved from a 1D version which was successfully employed for eye movement prediction as a tool for delay compensation in Human Computer Interaction which direct eye-gaze input, and suggested for the effort estimation for improving the usability of the graphical user interfaces.