31886426 simulation-des-correcteurs-pid(1)
TRANSCRIPT

Ministère de l’Enseignement Supérieur et de la Recherche Scientifique
UNIVERSITE A/MIRA DE BEJAIA
Faculté des Sciences et des Sciences de l’Ingénieur
DEPARTEMENT D’ELECTRONIQUE
1er année Master
Thème
Encadré par :
BOUDJLLABA Kamel
Présenté par :
GUENANE Lounas
Année Universitaire : 2009/2010

Remerciements

Remerciements
Remerciements
Je remercie DIEU tous puissant de me avoir donné le courage et la patience pour
réaliser ce travail.
Je tiens à remercié mon promoteur monsieur KAMEL BOUDJLLABA pour l’honneur
qui me a fait, en assurant l’encadrement du présent mini projet.
Je tiens aussi à remercie les membres de jury d’avoir accepté de juger mon travail.
Je remercie toutes les personnes qui ont contribué de prés ou de loin à la réussite de ce
travail.

Dédicace

Dédicace
Je dédie ce modeste travail :
A toute ma
famille
A mes amis
A touts qui
me connait
GUENANE LOUNAS

Sommaire

Sommaire
Remerciement...................................................................................................................................
Dédicace..............................................................................................................................................
Introduction générale.............................................................................................................................1
Chapitre 1 : Étude générale sur les systèmes asservis
1. Introduction ..........................................................................................................................................2
2. Définition ...............................................................................................................................................2
3. Structure générale d’un système asservi ...............................................................................2
4. Organes d’un système asservi ....................................................................................................3
5. Types de systèmes .............................................................................................................................3
8. Nécessite de la boucle fermée ......................................................................................................3
9. Performances recherchées pour un système asservi ........................................................4
9.1 Stabilité ..........................................................................................................................................4
9.1.1 Définition .....................................................................................................................4
9.1.2 Critères de stabilité ...................................................................................................4
Critère algébrique de Roth-Hurwitz ..............................................................4
Critère graphique .........................................................................................5
Critère du revers dans le plan de Nyquist ..................................6
Critère du revers dans le plan de Black ............................................6
Règle du revers dans le plan de Bode .........................................6
Critère Bode ..................................................................................7
Critère de Nyquist ............................................................................8
9.1.3 Degré de stabilité d'un système asservi ....................................................................8
9.2 Précision d’un système asservi ...............................................................................................8
Précisions dynamique ...................................................................................8

La précision statique ................................................................................9
Erreur statique .....................................................9
Erreur trainage .......................................................9
9.3 Rapidité d’un système asservi ..................................................................................................9
10. Analyse temporelle d’un système asservi ............................................................................9
o Réponse indicielle d’un système du 1ier ordre .................................9
o Réponse indicielle système du 2ème ordre ...............................10
Chapitre 2 : Généralité sur les correcteurs classique
1. Introduction ........................................................................................................................................12
2. Définition ..............................................................................................................................................12
3. Objectif de la correction ................................................................................................................12
4. Actions correctives classiques ..................................................................................................12
4.1. Action Proportionnelle ................................................................................................................12
4.2. Action Intégrale .......................................................................................................................13
4.3. Action Dérivée ..........................................................................................................................13
5. Schémas électronique générale ................................................................................................14
6. Différents types de correcteurs .................................................................................................15
6. 1. Le correcteur P..........................................................................................................................15
6. 2. Le correcteur PI ...........................................................................................................................16
6. 3. Le correcteur PD .....................................................................................................................16
6. 4. Correcteur PID .......................................................................................................................17
Chapitre 3 : Initiation au Pspice et Matlab (Sumulink)
I. PSpice ......................................................................................................................................................20
I. 1. Présentation ....................................................................................................................................20

I. 2. Schematics .......................................................................................................................................20
I. 3. Saisie du schéma ..........................................................................................................................20
I. 4. Placer les appareils de mesure ...............................................................................................21
I. 5. Simulation .......................................................................................................................................21
I. 6. Paramétrer l’analyse .................................................................................................................21
I. 7. Analyse du circuit avec PSpice A/D ...................................................................................22
I.8. Visualisation des résultats ........................................................................................................23
I.8.1. Visualisation manuelle .........................................................................................................23
I.8.2. Visualisation automatique ........................................................................................................23
II. Matlab(Simulink) ...........................................................................................................................23
III. Sumilink..............................................................................................................................................23
III. 1. Librairies de Simulink ..............................................................................................................23
III. 2. Construction d'un diagramme simulink .............................................................................24
IV. Résultats de simulation ..................................................................................................... 25
IV. 1 Résultats obtenues sous SIMULINK ............................................................................ 25
IV. 2 Résulta obtenus sous PSpice ........................................................................................ 31
VI. Commenter les résultats .................................................................................................. 36
Conclusion générale .................................................................................................................. 37
Annexes...............................................................................................................................................
Bibliographie ....................................................................................................................................

Introduction
Générale

Introduction générale
1
Introduction générale
L’étude des systèmes asservis, appelée étude des systèmes bouclés ou automatiques, fait
partie intégrante de nombreux domaines scientifiques et techniques comme l’électronique, la
mécanique, l’électrotechnique, …
Afin d’améliorer les performances d’un système asservi (précision-stabilité-rapidité), on
introduit dans la chaine directe un correcteur. Ce correcteur réalise généralement une amplification
du signal, il ne peut évidement être réalisé qu’à l’aide de composants actifs (amplificateur
opérationnels idéalisés).
Ce travail est partagé en trois chapitres. Le chapitre 1 présente les concepts
fondamentaux liés aux systèmes asservis linéaires (structure générale, description des
différant organes,…). Les performances de ces systèmes sont présentées en termes de
stabilité, de précession et de rapidité. L’étude de la stabilité est obtenue à l’aide des critères
algébriques (Routh) et des critères graphiques (Nyquist, Revers, Bode…). Pour l’étude de la
précision, on distingue la précision statique et la précision dynamique : la première concerne
l’étude en régime permanent tandis que la seconde concerne le régime transitoire. Pour
l’étude de la rapidité, on s’intéresse au temps de réponse. On termine ce chapitre par l’analyse
temporelle d’un système de premier et de second ordre représentant la réponse indicielle de
chacun des deux.
Le chapitre 2 présente les méthodes de corrections classiques permettant d’améliorer le
comportement des systèmes asservis. Les correcteurs introduits sont à action proportionnelle
(P), proportionnelle et dérivée (PD), proportionnelle et intégrale (PI) ou regroupant les trois
actions (PID). Le chapitre 3 est consacré à une initiation sur les deux logiciels PSPICE et
MATLAB (SUMILINK), et présentation des résultats de simulation de quelques exemples
pratiques. On termine se travail par une conclusion générale.

Chapitre.1
Généralité sur les
systèmes asservis

Chapitre.1 Généralité sur les systèmes asservis
2
1. Introduction
Dans ce chapitre, on représente quelque généralités sur les systèmes asservis (définition,
structure générale,…). On étudie aussi leurs performances recherchées (stabilité, précision,
rapidité).
2. Définition
Un système asservi est un système dont le rôle consiste essentiellement à établir une
correspondance définie entre une ou plusieurs grandeurs d’entrée, de faibles niveaux énergétiques,
et une ou plusieurs grandeurs de sortie de niveaux énergétiques plus élevés. Il possède les deux
propriétés suivantes :
C’est un système de commande avec amplification de puissance
C’est un système à retour
3. Structure générale d’un système asservi
Un système asservi est caractérisé par la présence de:
Chaînes directes : Elles comprennent des éléments amplificateurs et éventuellement, des
convertisseurs de puissance, en liaison avec les sources d’énergie.
Chaînes de retour : Elles sont constituées d’éléments de précision généralement passifs. Ce
ne sont pas des chaînes de puissance ; elles transmettent à l’entrée des informations sur les
grandeurs de sortie. Ces informations sont comparées aux signaux d’entrée au moyen de
comparateurs. Ces derniers élaborent les différences ou écarts entre les signaux d’entrée et
les informations des signaux de sortie.
Figure 1.1 schéma asymptotique d’un système asservis
Chaine directe
Chaine de retour
∑
Entée Erreur Sortie+
-

Chapitre.1 Généralité sur les systèmes asservis
3
4. Organes d’un système asservi
Un comparateur : Il réalise la fonction de détecteur d’écart. C’est un système à deux
entrées dont l’une est l’entrée du système asservi et l’autre sa sortie par l’intermédiaire du
retour. La sortie de cet organe est une grandeur proportionnelle à l’erreur.
(ܜ)ܛܖܗ۱ − (ܜ)ܛ = ઽ(ܜ) ܕܔ ()൫∞→ − =൯() ܕܔ∞→
ઽ(ܜ) =
Avec : ε(t) : écart , Cons(t) : grandeur d’entrée , s(t) : grandeur
Retour : en effet, l’asservissement sert en principe à « recopier » la consigne avec les
meilleures performances possibles.
Correcteur C(p) : En général, le correcteur C(p) est placé en amont de la perturbation.
C’est ici qu’il est en principe le plus efficace vis à vis de la consigne, mais aussi vis à vis de
perturbation, voire de dérives non linéaires.
Un capteur : organe mesurant la valeur de la grandeur de sortie et qui fournit un signal
représentant l’image de cette valeur.
Perturbation : On appelle perturbation tout phénomène physique intervenant sur le système
qui modifie l’état de la sortie. On distingue deux types :
Perturbation fugitive : elle a une duré tes brève.
Perturbation permanente
5. Types de systèmes
On distingue trois systèmes en fonction du type d’entrée ou de sortie
Système continu (entrée sortie continues)
Système discret (encrée sortie discrètes)
Système hybride (entrée continue sortie discrète et vice versa)
8. Nécessite de la boucle fermée
Un système asservi est caractérisé par la présence d’une boucle fermée qui est capable de :
compenser des perturbations qui ne sont pas mesurables
Compenser des variations du procédé lui-même qui rendent faux le modèle utilisé
Stabiliser un système qui serait instable en boucle ouverte

Chapitre.1 Généralité sur les systèmes asservis
4
9. Performances recherchées pour un système asservi
9.1 Stabilité
9.1.1 Définition
Un système est déclaré stable lorsque, soumis à une action extérieure fugitive, il revient dans
son état initial. L’instabilité induit une réponse divergente (oscillatoire ou apériodique) à un signal
borné, aboutissant aux saturations du système.
Mathématiquement, un système n’est pas stable que si tous les pôles de sa fonction de
transfert sont strictement à gauche de l’axe imaginaire dans le plan complexe.
9.1.2 Critères de stabilité
Les différents critères d’un système doivent être appliqués à la fonction de transfert en boucle
fermé. La stabilité est dans ce cas dépendante du dénominateur de la fonction de transfert c’est –à-
dire des racines d’équation numérateur qui constituent l’équation caractéristique
Critère algébrique de Routh-Hurwitz
Ce critère permet de savoir rapidement si un système à des pôles instables ou non. Sa mise en
œuvre nécessite la connaissance algébrique de la fonction transfert du système.
Soit un système dont sa fonction de transfert est la suivante:
G(p) =N(p)
D(p)
Avec : ()ܦ = + ଵ
ଵ… . . + ଵ+
Si certains sont <0 nul
D(p) a des racines à droite dans le plan complexe donc à partie réelle positive, le système est
instable.
Si tous sont positifs, on étudie le tableau suivant :
ଶ ସ ହ ………
ଵ ଷ ହ …….
ଶ ଶܣ ଷܣ ………ସܣ

Chapitre.1 Généralité sur les systèmes asservis
5
ଷ
*
*
*
*
*
*
ଶܤ
*
*
*
ଷܤ
*
*
*
………ସܤ
*
*
*
ଶ ଶܯ ଷܯ ………ସܯ
ଵ ଶ ଷ ସ………
۱ ଶܥ ଷܥ ………ସܥ
ଵܣ = ଵ− ଷ
ଵ
ଶܣ =ଵ ସ− ଵ ହ
ଵ
ଷܣ = −
ଵ
ଵܤ =ଵܣ ଷ− ଶܣ ଵ
ଵܣ
ଶܤ =ଵܣ ହ− ଷܣ ଵ
ଵܣ
.
.
.
ଵܥ =−ଶܯ ଵଶܯ
ଵ
La condition nécessaire de stabilité est que tous les coefficients de la 1ére colonne soient positifs.
Critère graphique
Le critère graphique consiste à étudier la position de la courbe de réponse harmonique en BO
par rapport au point critique défini par: ܒ)۴| )| = = ۰܌ ܒ)۴)ܚۯ )) = −ૡ
Pour évaluer la stabilité de l'asservissement (boucle fermée)

Chapitre.1 Généralité sur les systèmes asservis
6
Critère du revers dans le plan de Nyquist
En parcourant dans le sens des ω croissants le lieu de Nyquist en boucle ouverte F(jω) d’un
système asservi :
Si on laisse le point A de coordonnées (-1, 0) à sa gauche, le système est stable.
Si on laisse le point A à sa droite, le système est instable.
Si on passe par le point A, le système est juste oscillant.
Figure. 1. 2 Critère du revers dans le plan de Nyquist
Critère du revers dans le plan de Black
Un système linéaire bouclé est stable si en décrivant la courbe de Black de la fonction de
transfert en BO dans le sens des pulsations croissantes, on laisse le point critique sur sa
droite.
Figure. 1. 3 Critère du revers dans le plan de Black
Règle du revers dans le plan de Bode
Soit ω0 la pulsation pour laquelle la courbe de gain coupe l'axe 0dB et ωc la pulsation pour
laquelle la courbe des phases passe par -180. L'asservissement est stable si ω0< ωc.
Un système asservi est stable si, à la pulsation ω0 pour laquelle le module de F(jω) vaut 0dB, le
déphasage est supérieur à -180◦.

Chapitre.1 Généralité sur les systèmes asservis
7
Figure. 1. 4 Règle du revers dans le plan de Bode
Critère de Bode
On trace, dans le plan de Bode, le diagramme de la fonction de transfert de la boucle ouverte
F(jω).
Figure. 1. 5 Critère de Bode
Le système devient instable lorsqu'il produit un déphasage de 180°, il y a alors inversion de
signe et le comparateur va additionner la mesure au lieu de la soustraire à la consigne. Le système
s'emballe et devient instable. On définit donc la marge de phase Mφ
Mφ = 180− Arg(F(jωୡ))

Chapitre.1 Généralité sur les systèmes asservis
8
Critère de Nyquist:
Un système asservi est stable si et seulement si son contour de Nyquist en boucle ouverte fait
autour du point critique A, dans le sens horaire, un nombre de tour N égal au nombre P de pôles à
partie réelle positive de sa fonction de transfert en boucle ouverte.
Remarque: si ce nombre de pôles à partie réelle positive est nul, on retrouve le critère du revers.
9.1.3 Degré de stabilité d'un système asservi
Pour que la stabilité d'un système asservi soit assurée en toutes circonstances (perturbations
comprises), il faut que sa courbe de réponse harmonique en BO passe suffisamment loin du point
critique.
On chiffre le degré de stabilité d'un système linéaire au moyen de la marge de gain et de
phase. La marge de gain est le nombre de dB dont le gain doit être augmenté pour atteindre le point
critique. La marge de phase est le déphasage supplémentaire qui permet d'atteindre le point critique.
Les valeurs couramment admises pour assurer une stabilité suffisante sont :
marge de gain : 8 à 12 dB
marge de phase : de 300 à 450
Ces marges de stabilité peuvent être lues directement dans les différents plans (Bode, Black)
9.2 Précision d’un système asservi
Pour mesurer la précision d’un système asservi on s’intéresse à l’erreur.
Le système est d’autant plus précis que l’erreur est proche de zéro. Idéalement cette erreur devrait
être nulle, pratiquement c’est impossible à tout instant et ceci pour deux raisons :
Lorsque la consigne varie la sortie ne varie pas instantanément à cause de l’inertie du
système
Il existe des perturbations qui affectent le comportement du système et modifient au moins
temporairement la valeur de la sortie
Lorsqu’il s’agit d’un système asservi, on parle de la précision statique et dynamique.
Précisions dynamique : caractérisée pendant le régime transitoire essentiellement pour une
sollicitation en échelon de position. Elle est liée directement au degré de la stabilité de la
marge de gain et de phase

Chapitre.1 Généralité sur les systèmes asservis
9
La précision statique : a pour but d’évaluer l’aptitude du système à suivre différentes
catégories de sollicitation d’entrée. Elle est caractérisée par la différence en régime
permanent entre l’entrée (cosigne) et la sortie (réponse), cette différence appelée écart ou
erreur.
Erreur statique : on appel erreur statique la valeur de e(t) lorsque le temps tend vers l’infini
pour une réponse à un échelon unitaire
Erreur de trainage : on appelle erreur trainage la valeur de e(t) lorsque le temps tend vers
l’infini pour une réponse à une rampe unitaire
9.3 Rapidité d’un système asservi
La condition pour que le système soit suffisamment rapide en stipulant que le temps de
réponse soit suffisamment court.
Le temps de réponse est généralement défini comme le temps au bout duquel la réponse du
système atteint 5% prés de sa valeur finale, c’est le temps après lequel le système ne s’écarte pas de
5% de son état permanent.
10. Analyse temporelle d’un système asservi
L’analyse temporelle d’un système consiste à étudier la réponse d’un système représenté par
sa fonction de transfert à un signal d’entre variant dans le temps. En pratique, on se limite aux
quelques signaux d’entrées fondamentaux que sont l’impulsion, larampe et l’échelon.
La réponse temporelle d’un système linéaire peut toujours être décomposée en deux parties :
régime transitoire et régime permanent.
Réponse indicielle d’un système de 1er ordre
Il correspond à un modèle de fonction de transfert :
H(p) = Kଵ
ఛ୮ାଵ
H(p) : C’est la fonction du transfert en transformé de Laplace.
Avec : K : Le gain statique. ૌ : La constante de temps.
On applique à l'entrée de ce système un échelon d’amplitude E, la TL de l'entrée est donc
E(p) =బ
୮. La sortie du système est telle que
() = ()ܧ()ܪ =బ
(ఛ୮ାଵ)(ݐ)ݏ = (1ܧܭ −
ష
ഓ )
La réponse indicielle est représentée par la figure suivante :

Chapitre.1 Généralité sur les systèmes asservis
10
Figure .1.6 Réponse indicielle d’un système de premier ordre
s (ૌ) = 0,632K.E0
ܕܔ ∞→ () = .
La tangente a l'origine a une pente de۹۳
ૌ
Temps de montée tm = 2ૌ
Temps de réponse à 5% tr = 3ૌ
Avec :
Temps de montée tm est le temps pendant lequel s(t) passe de .(ܜ)ܛ à .(ܜ)ܛ
Réponse indicielle d’un système de 2ème ordre
Système de second ordre est représenté par la fonction de transfert :
H(p) =ωబ
మ
୮మାଶξωబ୮ାωబమ
: La pulsation naturelle du système
: Le coefficient d’amortissement.
Les pôles de cette fonction de transfert sont : pଵ,ଶ = − ξω ± ωටξଶ− 1
Pour ߦ ≥ 1, les deux pôles sont réels et nous sommes donc dans le cas de la superposition de
deux systèmes du 1er ordre. Ce qui est plus intéressant c’est donc le cas où ξ < 1, les deux pôles

Chapitre.1
sont complexes conjugués (pଵ,ଶ =
réponse indicielle comme il est représenté sur la figure suivante.
Figure.1.7 Réponse indicielle d’un système de second ordre
Les caractéristiques de cette réponse sont :
régime permanent : (ݐ)ݏ =
à l'origine, la tangente est horizontale
pulsation propre amortie
pseudo-période des oscillations :
temps de montré (temps au bout duquel s(t) atteint pour la première fois sa valeur en régime
permanent). t୫ =౦
ଶ(1
temps de pic t୮ =౦
ଶ=
temps de réponse à 5% : Une approximation pour
le dépassement D = s൫t
dépassements successifs :
Chapitre.1 Généralité sur les systèmes asservis
= − ξω ± jωට1 − ξଶ ) et cela introduit des dépassements dans la
réponse indicielle comme il est représenté sur la figure suivante.
Réponse indicielle d’un système de second ordre
Les caractéristiques de cette réponse sont :
= ܧܭ
la tangente est horizontale
pulsation propre amortie ω୮ = ωට1 − ξଶ
période des oscillations : T୮ =ଶπ
ω౦
temps de montré (temps au bout duquel s(t) atteint pour la première fois sa valeur en régime
1 −φ
π)
π
ω౦
temps de réponse à 5% : Une approximation pour >>ߦ 1 est t୰ = 3τ
ξ
൫t୮൯− KE . Le calcul donne : D = KEexp
dépassements successifs : ln (ୈమ
ୈభ) =
ଶπξ
ටଵξమ
Généralité sur les systèmes asservis
11
introduit des dépassements dans la
Réponse indicielle d’un système de second ordre
temps de montré (temps au bout duquel s(t) atteint pour la première fois sa valeur en régime
τ
ξ=
ଷ
ξωబ
exp (−ξπ
ටଵξమ$)

Chapitre.2
Généralité sur les
correcteurs
classiques

Chapitre. 2 Généralité sur les correcteurs classiques
12
1. Introduction
Le correcteur élabore le signal de commande u adéquat, envoyé à l’entrée du processus, afin
que sa sortie satisfasse au mieux les objectifs en terme d’asservissement ou de régulation.
Dans ce chapitre, on va illustrer les différentes structures de correcteurs classiques que l’on
rencontre lors la mise en œuvre de systèmes asservis continus.
2. Définition
On appelle correction, un système asservi qui doit maintenir constante la sortie conformément
à la consigne (constante) indépendamment des perturbations.
Les opérateurs essentiels du correcteur sont réalisables à partir d’amplificateurs à courant
continu et d’éléments résistances/capacités.
3. Objectif de la correction:
Cependant, chaque procédé possède ses exigences propres, chaque appareil possède ses
propres conditions de fonctionnement. Il est donc indispensable que la correction soit conçue pour
satisfaire aux besoins particuliers liés à la sécurité, aux impératifs de production et aux matériels.
Pour un système asservi, le but de la correction est :
accroitre la stabilité ;
augmenter le gain du système en boucle ouverte, du coté des basses fréquences, pour
augmenter la précision statique ;
assurer une réponse acceptable pour des signaux de consigne définis en fonction du temps ;
fournir des caractéristiques fréquentielles (gain, déphasage) demandées dans une bande de
fréquences.
4. Actions correctives classiques
4.1. Action Proportionnelle
L’action est dite proportionnelle lorsque le signal de commande est proportionnel au signal
d’erreur. Elle corrige de manière instantanée, donc rapide, tout écart de la grandeur à régler, elle
permet de vaincre les grandes inerties du système. Afin de diminuer l'écart de réglage et rendre le
système plus rapide, on augmente le gain mais, on est limité par la stabilité du système. Le
correcteur P est utilisé lorsqu’on désire régler un paramètre dont la précision n'est pas importante.

Chapitre. 2
Figure.2. 1
4.2. Action Intégrale
L’action est dite intégrale lorsque le signal de commande est proportionnel à l’intégrale du
signal d’erreur. Elle complète l'action proportionnelle et
régime permanent.
Afin de rendre le système plus dynamique (diminuer le temps de réponse), on diminue l'action
intégrale mais, ceci provoque l'augmentation du déphasage ce qui provoque l'instabilité en éta
fermé.
L'action intégrale est utilisée lorsqu’on désire avoir en régime permanent, une précision
parfaite, en outre, elle permet de filtrer la variable à régler d'où l'utilité pour le réglage des variables
bruitées.
Figure.2. 2
4.3. Action Dérivée
L’action est dite dérivée lorsque le signal de commande est proportionnel à la dérivée du
signal d’erreur.
L'action Dérivée, en compensant les inerties dues au temps mort, accélère la réponse du
système et améliore la stabilité de la boucle, en permettant notamment un amortissement rapide des
oscillations dues à l'apparition d'une perturbation ou à une variation subite de la consigne.
Généralité sur les correcteurs classique
Figure.2. 1 Symbole de l’Action Proportionnelle
L’action est dite intégrale lorsque le signal de commande est proportionnel à l’intégrale du
e l'action proportionnelle et permet d'éliminer l'erreur résiduelle en
Afin de rendre le système plus dynamique (diminuer le temps de réponse), on diminue l'action
intégrale mais, ceci provoque l'augmentation du déphasage ce qui provoque l'instabilité en éta
L'action intégrale est utilisée lorsqu’on désire avoir en régime permanent, une précision
parfaite, en outre, elle permet de filtrer la variable à régler d'où l'utilité pour le réglage des variables
Figure.2. 2 Symbole de l’Action Intégrale
L’action est dite dérivée lorsque le signal de commande est proportionnel à la dérivée du
L'action Dérivée, en compensant les inerties dues au temps mort, accélère la réponse du
ème et améliore la stabilité de la boucle, en permettant notamment un amortissement rapide des
oscillations dues à l'apparition d'une perturbation ou à une variation subite de la consigne.
Généralité sur les correcteurs classiques
13
L’action est dite intégrale lorsque le signal de commande est proportionnel à l’intégrale du
permet d'éliminer l'erreur résiduelle en
Afin de rendre le système plus dynamique (diminuer le temps de réponse), on diminue l'action
intégrale mais, ceci provoque l'augmentation du déphasage ce qui provoque l'instabilité en état
L'action intégrale est utilisée lorsqu’on désire avoir en régime permanent, une précision
parfaite, en outre, elle permet de filtrer la variable à régler d'où l'utilité pour le réglage des variables
L’action est dite dérivée lorsque le signal de commande est proportionnel à la dérivée du
L'action Dérivée, en compensant les inerties dues au temps mort, accélère la réponse du
ème et améliore la stabilité de la boucle, en permettant notamment un amortissement rapide des
oscillations dues à l'apparition d'une perturbation ou à une variation subite de la consigne.

Chapitre. 2
L'action D est utilisée dans l'industrie pour le réglage
recommandée pour le réglage d'une variable bruitée ou trop dynamique. En dérivant un bruit, son
amplitude risque de devenir plus importante que celle du signal utile.
Figure.2. 3
Remarque
Les actions intégrales et dérivées ne suffisent jamais seules, mais sont utilisées en
combinaison avec l’action proportionnelle.
5. Schémas électronique générale
Les correcteurs électriques preuves êtres réalisés simplement au moyen de c
par l’intermédiaire d’un ou plusieurs amplificateurs opérationnelles.
représenté sur la Figure. 2.4.
Figure. 2. 4 Schémas électronique général d’un correcteur classique
Sa fonction de transfert s’écrit :
Généralité sur les correcteurs classique
L'action D est utilisée dans l'industrie pour le réglage des variables lentes, elle n'est pas
recommandée pour le réglage d'une variable bruitée ou trop dynamique. En dérivant un bruit, son
amplitude risque de devenir plus importante que celle du signal utile.
Figure.2. 3 Symbole de l’Action Dérivée
Les actions intégrales et dérivées ne suffisent jamais seules, mais sont utilisées en
combinaison avec l’action proportionnelle.
5. Schémas électronique générale
Les correcteurs électriques preuves êtres réalisés simplement au moyen de c
par l’intermédiaire d’un ou plusieurs amplificateurs opérationnelles. Le montage d’un correcteur est
Schémas électronique général d’un correcteur classique
G(p) =S(p)
E(p)=
Zଶ(p)
Zଵ(p)
Généralité sur les correcteurs classiques
14
des variables lentes, elle n'est pas
recommandée pour le réglage d'une variable bruitée ou trop dynamique. En dérivant un bruit, son
Les actions intégrales et dérivées ne suffisent jamais seules, mais sont utilisées en
Les correcteurs électriques preuves êtres réalisés simplement au moyen de circuits passifs ou
e montage d’un correcteur est
Schémas électronique général d’un correcteur classique

Chapitre. 2
6. Différents types de correcteurs
6. 1. Le correcteur P
Le correcteur à action proportionnelle, ou
puisqu'il construit une commande
instantanée du signal d'erreur. Son schéma fonctionnel
Figure.
Ce correcteur délivre une commande de la forme
u
Sa fonction de transfert est de la forme:
Effet du correcteur :
augmentation de ω
diminution de ω0
diminution de la marge de phase
amélioration de la précision du système en BF
Augmentation de la marge de phase (amélioration
diminution de la précision du système en
Remarque :
Le correcteur P ne permet pas de régler
les marges de stabilité
Généralité sur les correcteurs classique
Différents types de correcteurs :
à action proportionnelle, ou correcteur P, a une action simple et naturelle,
puisqu'il construit une commande u(t) proportionnelle à l'erreur e(t). Il assure une réponse
instantanée du signal d'erreur. Son schéma fonctionnel est représenté par la Figure.
Figure. 2. 5 Symbole de Correcteur P
Ce correcteur délivre une commande de la forme :
u(t) = k୮ e(t) = k୮(w(t) − y(t))
Sa fonction de transfert est de la forme:
G(p) =U(p)
E(p)= K୮
augmentation de ω0 augmentation de la rapidité ;
diminution de la rapidité ;
diminution de la marge de phase (dégradation de la stabilité en BF)
amélioration de la précision du système en BF ;
Augmentation de la marge de phase (amélioration de la stabilité)
diminution de la précision du système en BF.
Le correcteur P ne permet pas de régler indépendamment la rapidité, la précision et
les marges de stabilité.
Généralité sur les correcteurs classiques
15
P, a une action simple et naturelle,
. Il assure une réponse
Figure. 2.5.
(dégradation de la stabilité en BF) ;
stabilité) ;
la rapidité, la précision et

Chapitre. 2
6. 2. Le correcteur PI
Ce type de correcteur a une action
en haute fréquence. Son comportement en basse fréquence permet
que le gain de l'intégrateur, dans ce contexte, tend vers l'infini.
Le correcteur PI est le plus utilisé en pratique où ses contributions à la précision et à la
robustesse du système asservi sont particulièrement appréc
suivant :
Figure.
La commande délivrée par ce correcteur est de la forme
Sa fonction de transfert est de la forme :
:܂ Temps d’action intégrale (seconde
Effet du correcteur : Gain en basses fréquences (
La phase du système corrigé n'est modifiée qu'en basses fréquences
améliore la précision
diminue la stabilité
ralentit le système
6. 3. Le correcteur PD
Ce correcteur n'apporte aucune précision. Il est utile en régime transitoire.
L'action D, apporte une amélioration du comportement dynamique, en
de réaction du correcteur à la moindre variation de l'erreur. Elle anticipe
Généralité sur les correcteurs classique
a une action Intégrale en basse fréquence et une action Proportionnelle
Son comportement en basse fréquence permet d'annuler l'erreur statique, du fait
que le gain de l'intégrateur, dans ce contexte, tend vers l'infini.
PI est le plus utilisé en pratique où ses contributions à la précision et à la
robustesse du système asservi sont particulièrement appréciées. Son schéma
Figure. 2. 6 Symbole de correcteur PI
La commande délivrée par ce correcteur est de la forme :
u(t) = K୮ (e(t) +1
T୧න e(τ)୲
ஶ
dτ)
Sa fonction de transfert est de la forme :
G(p) =U(p)
E(p)= K୮
1 + pT୧pT୧
intégrale (secondes) ܘ۹ : Le gain d’action
Gain en basses fréquences (ω1/Ti) infini, erreur statique nulle
La phase du système corrigé n'est modifiée qu'en basses fréquences
améliore la précision (augmentation du gain en BF) ;
diminue la stabilité;
ralentit le système
n'apporte aucune précision. Il est utile en régime transitoire.
L'action D, apporte une amélioration du comportement dynamique, en
à la moindre variation de l'erreur. Elle anticipe l’évolution du système.
Généralité sur les correcteurs classiques
16
ntégrale en basse fréquence et une action Proportionnelle
d'annuler l'erreur statique, du fait
PI est le plus utilisé en pratique où ses contributions à la précision et à la
iées. Son schéma fonctionnel est le
erreur statique nulle ;
La phase du système corrigé n'est modifiée qu'en basses fréquences ;
n'apporte aucune précision. Il est utile en régime transitoire.
L'action D, apporte une amélioration du comportement dynamique, en augmentant la vitesse
’évolution du système.

Chapitre. 2
Ces diverses propriétés rendent l'action du terme D stabilisante ainsi qu'une amélioration de la
rapidité du système.
La commande délivré par ce correcteur est de la forme
Sa fonction de transfert est la suivante
Avec Td : constante de dérivation
Effet du correcteur :
Diminution
n’augmente pas la précision
augmente la stabilité
améliore la rapidité de réponse
augmente la sensibilité au bruit.
6. 4. Correcteur PID
Les correcteurs, usuellement utilisés en pratique sont les correcteurs à effet proportio
intégral et dérivé (P.I.D.). Ils permettent d'engendrer à partir de la sortie du comparateur (c'est
dire l'écart existant entre la consigne et la grandeur à réguler) un signal proportionnel à l'erreur et à
sa dérivée d'une part, et à son intégra
Figure.
La commande délivrée par ce correcteur est de la forme
u(t)
Sa fonction de transfert est la suivante
Généralité sur les correcteurs classique
Ces diverses propriétés rendent l'action du terme D stabilisante ainsi qu'une amélioration de la
ivré par ce correcteur est de la forme :
u(t) = K୮ (e(t) + Tde(t)
dt)
Sa fonction de transfert est la suivante :
G(p) =U(p)
E(p)= K୮(1 + pT )
: constante de dérivation (Plus Td est grande, plus l'action dérivée est importante
Diminution de l'erreur permanente ;
n’augmente pas la précision;
augmente la stabilité ;
améliore la rapidité de réponse;
augmente la sensibilité au bruit.
Les correcteurs, usuellement utilisés en pratique sont les correcteurs à effet proportio
intégral et dérivé (P.I.D.). Ils permettent d'engendrer à partir de la sortie du comparateur (c'est
dire l'écart existant entre la consigne et la grandeur à réguler) un signal proportionnel à l'erreur et à
sa dérivée d'une part, et à son intégrale d'autre part. Son schéma fonctionnel est le suivant :
Figure. 2.7 Symbole de correcteur PID
La commande délivrée par ce correcteur est de la forme :
( ) = K୮ e(t) +1
T୧න e(τ)dτ + T୲
de(t)
dt
Sa fonction de transfert est la suivante :
Généralité sur les correcteurs classiques
17
Ces diverses propriétés rendent l'action du terme D stabilisante ainsi qu'une amélioration de la
est grande, plus l'action dérivée est importante).
Les correcteurs, usuellement utilisés en pratique sont les correcteurs à effet proportionnel,
intégral et dérivé (P.I.D.). Ils permettent d'engendrer à partir de la sortie du comparateur (c'est-à-
dire l'écart existant entre la consigne et la grandeur à réguler) un signal proportionnel à l'erreur et à
schéma fonctionnel est le suivant :

Chapitre. 2
G
Les différentes structures d
On peut distinguer trois structures principales
Structure série :
Le schéma fonctionnel est représenté par la figure suivante
Figure. 2. 8
La commande délivrée par ce correcteur est de la forme
u(t) = K
Sa fonction de transfert est la suivante
Structure PID Parallèle
Le schéma fonctionnel est
Figure.
La commande délivrée par ce correcteur est de la forme
u(t
Sa fonction de transfert est la suivante
Généralité sur les correcteurs classique
G(p) =U(p)
E(p)= K୮
1 + pT୧+ pଶT୧T
pT୧
Les différentes structures d’un PID :
On peut distinguer trois structures principales :
Le schéma fonctionnel est représenté par la figure suivante :
2. 8 Le schéma fonctionnel d’un PID série
La commande délivrée par ce correcteur est de la forme :
K୮T୧T
T୧൨e(t) +
K୮
T୧න e(t) dt + K୮T
de(t)
dt
Sa fonction de transfert est la suivante :
G(p) = K୮(1 +1
T୧p)(1 + T p)
Structure PID Parallèle
Le schéma fonctionnel est représenté par la figure suivante :
Figure. 2. 8 Le schéma fonctionnel d’un PID parallèle
La commande délivrée par ce correcteur est de la forme :
t) = K୮e(t) +1
T୧න e(t)dt + T
de(t)
dt
Sa fonction de transfert est la suivante :
Généralité sur les correcteurs classiques
18
)
Le schéma fonctionnel d’un PID parallèle

Chapitre. 2
Structure PID Mixte
Le schéma fonctionnel est représenté par la figure suivante
Figure. 2. 9
Sa fonction de transfert est de la forme
Algorithme de réglage
1. On commence par annuler les actions intégral et dérivé (
ramener à un correcteur proportionnelle simple.
2. On règle K୮ , en partant de valeurs faible et en l’augmentant progressivement de façon à
obtenir une réponse indicielle présen
valeur finale.
3. Pour la valeur de K
progressivement sa valeur jusqu'à obtenir un dépassement du même ordre ou légèrement
supérieur par rapport à
4. Pour les valeurs (K୮ ,
faible et on l’augmentant progressivement de façon à diminuer le dépassement jusqu'à la
valeur que l’on s’est imposé
Effet du correcteur :
Eliminer l’erreur ;
Améliorer la stabilité
Augmenter la rapidité
Augmenter la bonde passante
Remarque : il existe d’autres types de correcteurs tel
retard de phase.
Généralité sur les correcteurs classique
G(p) = K୮ +1
T୧p+
T p
1 + τp
Structure PID Mixte :
Le schéma fonctionnel est représenté par la figure suivante
2. 9 Le schéma fonctionnel d’un PID mixte
Sa fonction de transfert est de la forme :
G(p) = K୮(1 +ଵ
୮+
ౚ୮
ଵାத୮)
commence par annuler les actions intégral et dérivé (T୧= ∞, T
ramener à un correcteur proportionnelle simple.
, en partant de valeurs faible et en l’augmentant progressivement de façon à
obtenir une réponse indicielle présentant 10% à 20% de dépassement par rapport à la
K୮ déterminée à l’étape précédente, en règle
progressivement sa valeur jusqu'à obtenir un dépassement du même ordre ou légèrement
à la consigne.
, T୧ ) déterminées précédemment, on règle T
faible et on l’augmentant progressivement de façon à diminuer le dépassement jusqu'à la
valeur que l’on s’est imposée.
;
Améliorer la stabilité ;
Augmenter la rapidité ;
Augmenter la bonde passante.
iste d’autres types de correcteurs tels que les correcteurs à avance de phase et à
Généralité sur les correcteurs classiques
19
= 0) de manière a ce
, en partant de valeurs faible et en l’augmentant progressivement de façon à
tant 10% à 20% de dépassement par rapport à la
à l’étape précédente, en règle T୧ en diminuant
progressivement sa valeur jusqu'à obtenir un dépassement du même ordre ou légèrement
T en partant de valeur
faible et on l’augmentant progressivement de façon à diminuer le dépassement jusqu'à la
que les correcteurs à avance de phase et à

Chapitre .3
Résultats de la
simulation

Chapitre. 3 Résultats de la simulation
20
I. PSpice
I. 1. Présentation
PSpice est un outil puissant qui permet de réaliser des simulations de circuits
électriques, analogique ou numérique ou mixte. Un peu complexe au premier abord, une fois
passés les problèmes de prise en main pratique du logiciel et surtout après avoir saisi les
différents modes de simulation possibles, il devient un outil puissant, rapide et pratique.
On doit trouver dans le menu « démarrer » et dans le sous menu « Pspice Student » les
logiciels suivants : Capture Student, PSpice AD Student, PSpice Desgn Manager, PSpice
Message Viewer, PSpice Model Editor Student, PSpice Optimiser Student, PSpice
Stimulus Student, Release Notes et Shematics.
On s’intéresse ici aux programmes suivants :
PSpice AD Student, le logiciel de simulation à proprement parlé
Schematics : le logiciel qui permet de saisir le schéma à simuler, de régler les
paramètres de simulation et de la lancer.
I. 2. Schematics
Pour nous rendre dans le module Schematics, On clique sur cette icône .
Maintenant qu’on est dans Schematics, on peut:
• créer un nouveau schéma à partir d'une feuille blanche
• ouvrir un schéma existant (commande File/Open)
• modifier à volonté notre schéma
• paramétrer l'analyse
• sauvegarder notre travail (y compris les paramètres d'analyse)
I. 3. Saisie du schéma
On commence par cliquer sur le bouton "Get New Part" ( ), ou si on préfère par la
commande Draw/Get New Part..., ou encore par le raccourci-clavier Ctrl+G. Une liste de
composants s’affiche. Il suffit de choisir le ou les composants dans la liste déroulante (par
exemple: r), puis de cliquer sur le bouton Place (si on veut ensuite choisir d'autres
composants) ou Place & Close

Chapitre. 3 Résultats de la simulation
21
I. 4. Placer les appareils de mesure
On utilisera pour ce faire les boutons Voltage Marker et Current Marker.
Le voltmètre mesure toujours par rapport à la masse (GND_EARTH) (sauf avec le
voltmètre différentielle qui lui possède alors 2 bornes).
L’ampèremètre lui aussi ne possède qu’une borne ; il suffit juste de le « poser » sur la
borne du composant duquel on souhaite connaître le courant.
I. 5. Simulation
Les icônes spécifiques à la simulation sont :
I. 6. Paramétrer l’analyse
On clique sur le bouton Setup Analysis ( ). Un panneau de boutons et de cases à
cocher apparaît :

Chapitre. 3 Résultats de la simulation
22
On coche toujours Bias Point Detail et on ne s’occupe pas des autres boutons, sauf,
éventuellement, AC Sweep, DC Sweep et Transient...
DC Sweep : Etude en statique du montage. Correspond à l'étude des variations des
sources continues, de la température, variation des paramètres du montage ou des
composants (Ex: béta d'un transistor)... Permet d'étudier la polarisation, choix d'un
point de repos optimum.
AC Sweep permet d'obtenir un graphe de la tension en fonction de la fréquence.
C’est donc une analyse harmonique (Bode, Nyquist, Black). L'étude est faite en
sinusoïdal petits signaux, en linéarisant les modèles autour du point de repos calculé.
L'étude est faite d'une fréquence min à une fréquence max, soit linéairement soit de
manière logarithmique.
Time Domain (Transient). Cette analyse permet de visualiser des signaux en
fonction du temps (Chronogrammes en régime permanent ou en transitoire). Elle tient
compte des modèles non linéaires (saturation, limitation par les alimentations, ...),
mais le temps de simulation peut être considérable (plusieurs heures) si l'on ne
réfléchit pas correctement aux paramètres de simulation.
Bias Point. Calcul du point de repos appelé point de polarisation. Ce calcul est
automatiquement lancé pour permettre le démarrage des autres simulations. Il est
indispensable pour d'autres analyses qui en dépendent. Dans le cas de l'analyse
harmonique (AC), les caractéristiques non linéaires de certains composants (Ex:
transistors, diodes...) sont linéarisées (approximation par la tangente) à l'endroit du
point de repos.
I. 7. Analyse du circuit avec PSpice A/D
Le module de simulation est lancé à partir de Schematics en cliquant sur le bouton
ou par Analysis/Run Probe, ou en tapant la touche F12.
Si on clique sur les boutons Enable Bias Voltage Display (le V majuscule) et/ou Enable
Bias Current Display (le I majuscule): les valeurs des tensions et des courants sont affichées
directement sur le schéma.

Chapitre. 3 Résultats de la simulation
23
I.8. Visualisation des résultats
I.8.1. Visualisation manuelle
Pour visualiser les signaux, cliquer sur l’icône (Add Trace)
I.8.2. Visualisation automatique
Il est possible de préciser directement sur le schéma quels sont les signaux à visualiser.
Sans fermer la fenêtre des résultats de simulation, aller dans Capture et cliquer sur l'icône de
la sonde de tension
Placer sur le schéma, autant de sondes qu'il y a de signaux à visualiser.
Retourner dans la fenêtre des résultats de simulation, les courbes sont automatiquement
ajoutées.
II. Matlab
MATLAB est une abréviation de MATrix LABoratory. Ecrit à l’origine, en Fortran,
par CLEVE MOLER, MATLAB était destiné à faciliter l’accès au logiciel matriciel.
La version actuelle, écrite en C par The Math Works Inc., existe en version
“professionnelle” et en version “étudiant”.
MATLAB est un logiciel de calcul matriciel à syntaxe simple. Avec ses fonctions
spécialisées. Il peut être aussi considéré comme un langage de programmation adapté pour les
problèmes scientifiques.
III. Sumilink
Sumilink est un outil additionnel à Matlab, permet la modélisation, la simulation et
l’analyse de systèmes dynamiques linéaires ou non linéaires. Ces systèmes peuvent être
analogiques, discrets ou numériques.
Les paramètres régissant le fonctionnement de ses systèmes peuvent être modifiés en
ligne en cours de simulation, et l’on peut observer leur effet immédiatement.

Chapitre. 3
III. 1. Librairies de Simulink
Les différentes librairies de Sumilink sont représentées par la figure suivante
Sources : Sources de signaux
Discrete : Blocs discrets
Linear : Blocs linéaires
Nonlinear : Blocs non linéaires
Connections : Entrée/sortie, multiplexeur/démultiplexeur, etc.
Demos : Démos
Blocksets & Toolboxes
III. 2. Construction d'un diagramme simulink
Pour commencer, dans le menu File, on choisit New
Untitled s'ouvrira. Pour dessiner un schéma à simuler, il suffit de double cliquer sur la
bibliothèque correspondante de la librairie et le ramener par l’intermédiaire de la souris.
Résultats de la simulation
1. Librairies de Simulink
Les différentes librairies de Sumilink sont représentées par la figure suivante
Figure. 4. 2. Librairies de Simulink
Sources de signaux
Blocs discrets
Blocs linéaires
Blocs non linéaires
Entrée/sortie, multiplexeur/démultiplexeur, etc.
Blocksets & Toolboxes : Blocksets et toolboxes
Construction d'un diagramme simulink
Pour commencer, dans le menu File, on choisit New - Model. Une fenêtre de travail
s'ouvrira. Pour dessiner un schéma à simuler, il suffit de double cliquer sur la
bibliothèque correspondante de la librairie et le ramener par l’intermédiaire de la souris.
Résultats de la simulation
24
Les différentes librairies de Sumilink sont représentées par la figure suivante :
Model. Une fenêtre de travail
s'ouvrira. Pour dessiner un schéma à simuler, il suffit de double cliquer sur la
bibliothèque correspondante de la librairie et le ramener par l’intermédiaire de la souris.

Chapitre. 3 Résultats de la simulation
25
IV. Résultats de simulation
IV. 1 Résultats obtenues sous SIMULINK
Correcteur P
Système de Premier ordre
Système de seconde ordre
0 2 4 6 8 10 12
x 104
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Temps(s)
La reponse indicielle pour differentes valaeurs de Kp
Sans correcteur
Kp=2
Kp=5
Kp=15
Kp=20
Kp=45
Echellon
0 0,000004 0,000009 0,000013 0,000018 0,000022 0,000027 0,000031 0,000036 0,000040
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2La reponse indicielle pour les differentes valeurs de Kp
Temps(s)
Sans correcteur
Kp=5
Kp=15Kp=30
Kp=50
Echellon

Chapitre. 3 Résultats de la simulation
26
Correcteur PI
Système Premier ordre
Kp=10, Ti varie
Kp varie, Ti=1.5
Système Seconde ordre
0 2 4 6 8 10 12
x 104
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Temps
Reponse indicille
sans correcteur
Ti=0.02
Ti=0.3
Ti=1
Ti=2.5
Ti=5
echellon
0 2 4 6 8 10 12
x 104
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1reponse indicielle
Temps
sans correcteur
Kp=5
Kp=15
Kp=30
Kp=50
Echellon

Chapitre. 3 Résultats de la simulation
27
Kp=3, Ti varie ;
Kp varie, Ti =0.5;
Correcteur PD
0 1000 2000 3000 4000 5000 60000
0.5
1
1.5
Temps
Reponse indiciellesans correcteur
Ti=5*1e-4
Ti=7*1e-5
Ti=3*1e-5
Ti=2*1e-5
Ti=1e-5
echellon
0 1000 2000 3000 4000 5000 60000
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Temps
Reponse indicielle
sans correcteur
Kp=5
Kp=20
Kp=50
echellon

Chapitre. 3 Résultats de la simulation
28
Système Premier ordre
Td varie; n=10 ; Kp=3
Td=1.5 ; n=10 ; Kp varie.
Système de seconde ordre
0 100 200 300 400 500 600 7000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Temps
amplitu
de
reponse indicielle
sans correcteur
Td=0.03
Td=0.05
Td=0.1
Td=0.3
echellon
0 100 200 300 400 500 600 7000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Temps
Am
plitu
de
Reponce indicielle
sans correcteur
Kp=5
Kp=10
Kp=50
echellon

Chapitre. 3 Résultats de la simulation
29
Kp=3, Ti varie ;
Kp varie, Ti =0.5;
Correcteur PID
0 1000 2000 3000 4000 5000 60000
0.5
1
1.5
Temps
Reponse indiciellesans correcteur
Ti=5*1e-4
Ti=7*1e-5
Ti=3*1e-5
Ti=2*1e-5
Ti=1e-5
echellon
0 1000 2000 3000 4000 5000 60000
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Temps
Reponse indicielle
sans correcteur
Kp=5
Kp=20
Kp=50
echellon

Chapitre. 3 Résultats de la simulation
30
Système Premier ordre
Ti=0.5, Td=2, n=10, Kp varie
Système Seconde ordre
Ti=5*10-7, Td=2*10-6, n=10, Kp varie
0 200 400 600 800 1000 1200 1400 1600 18000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Temps
Am
plitu
de
Reponse indicielle
sans correcteur
Kp=5
Kp=15Kp=30
Kp=50
echellon
0 200 400 600 800 1000 1200
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
Temps
Am
plit
ude
Reponse indiciele
sans correcteur
Kp=5
Kp=20
Kp=35
Kp=50
echellon

Chapitre. 3 Résultats de la simulation
31
Résulta obtenus sous PSpice
Correcteur P
Système Premier ordre
Système Seconde ordre
Correcteur PI
TimeV(C3:2)
0V
0.2V
0.4V
0.6V
0.8V
1.0VKp=45
Kp=20
Kp=15
Kp=5
Kp=2
Time
0s 5us 10us 15us 20us 25us 30us 35us 40us 45us 50us 55us 60us 65us 70usV(L:2)
0V
0.5V
1.0V
1.5V
Kp=50Kp=30
Kp=15
Kp=5

Chapitre. 3 Résultats de la simulation
32
Système Premier ordre
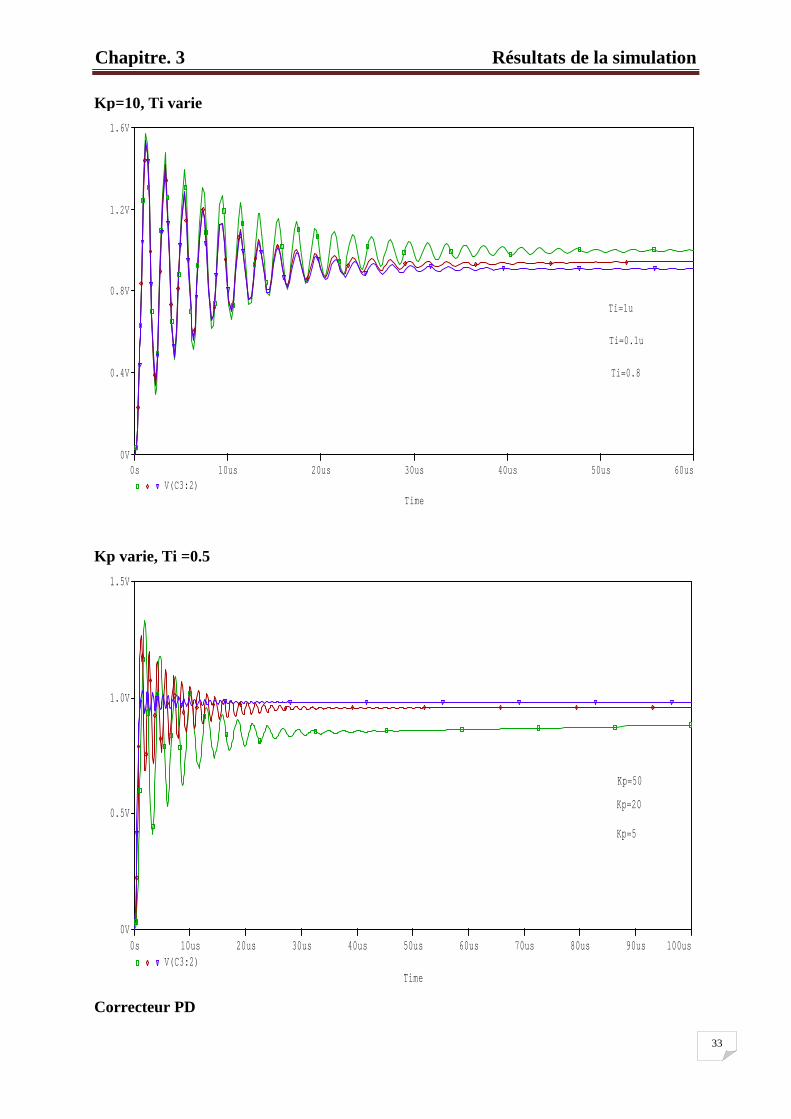
Kp=10, Ti varie
Kp varie, Ti=1.5
Système Seconde ordre
Time
0s 20ns 40ns 60ns 80ns 100ns 120ns 140ns 160ns 180ns 200ns 220ns 240ns 260ns 280ns 300nsV(C3:2)
0.3V
0.4V
0.5V
0.6V
0.7V
0.8V
0.9V
1.0V
Ti=700n
Ti=300n
Ti=100n
Ti=50n
Time
0s 0.5us 1.0us 1.5us 2.0us 2.5usV(C3:2)
0V
0.5V
1.0V
Kp=50
Kp=30
Kp=15
Kp=5
Chapitre. 3 Résultats de la simulation
33
Kp=10, Ti varie
Kp varie, Ti =0.5
Correcteur PD
Time
0s 10us 20us 30us 40us 50us 60usV(C3:2)
0V
0.4V
0.8V
1.2V
1.6V
Ti=0.8
Ti=0.1u
Ti=1u
Time
0s 10us 20us 30us 40us 50us 60us 70us 80us 90us 100usV(C3:2)
0V
0.5V
1.0V
1.5V
Kp=50
Kp=20
Kp=5

Chapitre. 3 Résultats de la simulation
34
Système Premier ordre
Td=500u; n=10; Kp varie.
Système Seconde ordre
Kp varie, Ti =0.8u
Correcteur PID
Time
0s 2us 4us 6us 8us 10us 12us 14us 16us 18us 20usV(C3:2)
0V
0.5V
1.0V
Kp=50
Kp=25
Kp=5
Time
0s 5us 10us 15us 20us 25usV(C3:2)
0V
0.4V
0.8V
1.2V
1.6V
Kp=5
Kp=15
Kp=50

Chapitre. 3 Résultats de la simulation
35
Système Premier ordre
Kp varie
Système Seconde ordre
Ti=5*10-7, Td=RVAR*0.5*nF, Kp varie
Time
0s 1us 2us 3us 4us 5us 6us 7us 8us 9us 10usV(C3:2)
0V
0.5V
1.0V
Kp=50
Kp=30
Kp=5
Time
0s 5us 10us 15us 20us 25us 30usV(L:2)
0V
0.5V
1.0V
1.5V
Kp=50
Kp=25
Kp=5

Chapitre. 3 Résultats de la simulation
36
VI. Commenter les résultats
Correction par le correcteur P
Système de 1ereordre
Si on augmente le gain du correcteur P, le système va devenir de plus en plus rapide et
l’erreur de la sortie va diminuer .cependant, un gain très fort risque de provoqué l’apparition
d’effet non linéaire
Système de2eme ordre
Kp est grand, il rendre le système moins stable, diminue l’erreur statique et améliore la
rapidité
Correction par le correcteur PI
Nous voyons que le système est plus lent, mais la précision c’est améliorer puisque
l’erreur statique est nulle
Correction par le correcteur PID
Il augmente la stabilité et n’apporte aucune précision
Correction par le correcteur PID
Il combine les inconvénients et les avantages des correcteurs P, PI et PD
(Ti, Kp) augmente la précision
Td augmente la stabilité
(Td, Kp ) augmente la rapidité

Conclusion
Générale

Conclusion générale
Conclusion générale
Apres l’étude de se modeste travail, on peut conclure que :
Un système asservis performant doit être stable, précis et rapide ;
L'idée générale qui préside au fonctionnement en boucle fermée est que ce type de
contrôle, qui compare en permanence ce que l'on obtient à ce que l'on souhaite
obtenir, permet très généralement de diviser les défauts par le gain de la boucle : les
temps de réponse sont diminués, les distorsions sont atténuées etc.
Le principe d'un correcteur est de « modeler » la fonction de transfert en boucle ;
ouverte pour trouver un compromis acceptable entre :
La contrainte d'amortissement, à fortiori la stabilité du système ;
la minimisation de l'erreur ;
Le temps de réponse.
Les correcteurs série les plus répandus sont de type proportionnel, intégral, dérivé
(PID) car ils permettent d’appliquer ces trois actions élémentaires au signal d’erreur
E(s) pour commander le système ;
La simulation donne la possibilité de réaliser puis de tester un montage qui nous
permet évidement d’économiser le temps ;
PSPICE est un logiciel très complet. Il permet de simuler tous les aspects de systèmes
que l’on rencontre en électronique de commande analogique, asservissement…
SIMULINK est une extension de MATLAB, un logiciel mathématique destine à la
simulation des systèmes asservis.

1. Structure électronique des différents correcteurs
Correcteur P
Correcteur PI
Figure .2
G(p) =S(p)
E(p)=
Avec K୮ = −మ
భ
Structure électronique des différents correcteurs
Figure .1 schéma électronique de P
G(p) =U(p)
E(p)= K୮ = −
Rଶ
Rଵ
Figure .2 schéma électronique de PI
)
)= −
Rଶ +1
Cଵp
Rଵ= −
1 + RଶCଵp
RଵCଵp= −
Rଶ
Rଵ(1 +
1
RଶCଵ
et T୧= RଶCଵ
Annexes
ଵp)

Correcteur PD
Figure .3
S(p)
E(p)=
Avec K୮ = −మ
భet
Correcteur PID
Figure
Avec
K୮ =మେమ
Figure .3 schéma électronique de PD
= −Rଶ
Rଵ
1 + RଵCp
= −Rଶ
Rଵ(1 + RଵCp)
et T = RଶC
ure. 4 Schéma électronique de PID
మାభେభ
భେమ; T୧= RଵCଶ et T = RଶCଵ
Annexes
ଵ

Annexes
Schémas de simulation
Sous PSpice
Correction par le correcteur P
Correction par le correcteur PI
Correction par le correcteur PD

Annexes
Correction par le correcteur PID
Correction par le correcteur P
Correction par le correcteur PI

Annexes
Correction par le correcteur PD
Correction par le correcteur PID
Sous SIMULINK (schémas bloc)
Correction par le correcteur P
Step 2
Step 1
Scope
Gain
Kp
FT de systeme corrigé 2
1
RC.s+1
FT de systeme corrigé 1
1
RC.s+1

Annexes
Correction par le correcteur PD
Correction par le correcteur PI
Correction par le correcteur PID
Correction par le correcteur P
Step 2
Step 1
Scope
FT de systeme corrigé 2
1
RC.s+1
FT de systeme corrigé 1
1
RC.s+1
FT de correcteur PD
KpTd *(1+n).s+Kpn
Td .s+n
Step 2
Step1
Scope
FT de systeme corrigé 2
1
RC.s+1
FT de systeme corrigé 1
1
RC.s+1
FT de correcteur PI
KpTi .s+Kp
Ti .s+1
Step 2
Step 1
Scope
Integrator 3
Kp
Ti .s
Gain
Kp
FT de systeme corrigé 4
1
RC.s+1
FT de systeme corrigé 1
1
RC.s+1
FT de correvteur PD 4
Kp*Td *(1+n).s+Kp*n
Td .s+n
Step 2
Step 1
Scope
Gain
Kp
FT de systeme corrigé 2
1
LC .s +RC.s+12
FT de systeme corrigé 1
1
LC.s +RC.s+12

Annexes
Correction par le correcteur PD
Correction par le correcteur PI
Correction par le correcteur PID
Step2
Step1
Scope
FT de systeme corrigé 2
1
LC.s +RC.s+12
FT de systeme corrigé 1
1
LC.s +RC.s+12
FT de correcteur PD
KpTd *(1+n).s+Kpn
Td .s+n
Step2
Step 1
Scope
FT de systeme corrigé 2
1
LC .s +RC.s+12
FT de systeme corrigé 1
1
LC.s +RC.s+12
FT de correcteur PI
KpTi .s+Kp
Ti .s+1
Step 2
Step 1
Scope
Integrator 3
Kp
Ti .s
Gain
Kp
FT de systeme corrigé 4
1
LC.s +RC.s+12
FT de systeme corrigé 1
1
LC .s +RC.s+12
FT de correvteur PD 4
Kp*Td *(1+n).s+Kp *n
Td .s+n

Annexes

Bibliographie

Bibliographie
Bibliographie :
1. commande des systèmes linéaires /PHILIPE de larminat/cote 629.8/22
2. COURS D4AUTOMATIQUE : asservissement /régulation/ commande analogique
MOURICE RIVOIRE JEAN LOUIS FERRIER/COTE 629.8/133
3. COURS ET EXERCICES CORIGEE : AUTOMATIQUE CONTROLE ET
REGULATION /PATRICK PROUVOST/COTE : 629.8/142
4. COURS ET EXERCICES CORIGEE : AUTOMATIQUE CONTROLE ET
REGULATION /PATRICK PROUVOST/COTE : 629.8/228
5. PHYSIQUE APLIQUEE : asservissements linéaires continues (cours, exercice
corrigées et travaux pratiques /Patrick Rousseau/ cote : 629.8/155
6. étude et réalisation de la régulation d’un moteur à courant continue alimenté par un
hacheur /M : FERKANE Arezki—M : BENZEHRA Mohamed/cote : 621.38A/223
7. Systèmes asservis linéaire / Michel Villain / cote : 629.8/145
8. http://www.eig.ch/en/laboratoires/systemes-asservis/reglages/reglages-continus-
lineaires/chapitre-9-modelisation-et-simulation/index.html
9. http://www.eig.ch/en/laboratoires/systemes-asservis/matlab/index.html
10. http://www.yopdf.com