4. ajamite jÕuahelate lÜlitused - ene.ttu.ee · sp sk k k2 juhtnupp kontaktor sulavkaitse relee...
TRANSCRIPT

4. AJAMITE JÕUAHELATE LÜLITUSED Kuidas ühendatakse elektrimootori mähised toiteallikaga? Lülitid, releed ja kontaktorid, programmeeritavad kontrollerid Kuidas toimub mootorite kiiruse reguleerimine? Impulss- või takistusreguleerimine? Pooljuhtmuundurite skeemid 4.1. Mootorite lihtsad käivitus- ja kaitseahelad Asünkroonmootori otselülitus toitevõrku. Suurt osa asünkroonmootoritest lülitatakse otse toitevõrku. Lülitusseadmeks võivad olla kas koormus või kaitselülitid. Sagedaste lülituste korral on lülitusseadmeks tavaliselt surunupplülititega juhitav kontaktor. Sõltuvalt vajadusest võib mootor pöörelda kas ühes suunas, või tuleb selle pöörlemissuunda muuta. Ühesuunalise pöörlemisega mootori otselülitus toitevõrku on näidatud joonisel 4.1. Mootori ja juhtnuppude toiteahelad pingestatakse lülitiga Q, milleks tavaliselt on kaitselüliti. Mootori käivitamine toimub vajutamisega surunupplülitile SK, mis sulgeb kontaktori lülitusmagneti mähise K vooluahela. Kontaktori jõukontaktid K1 ja abikontakt K2 sulguvad ning mootor käivitub. Tänu abikontakti K2 sulgumisele jääb kontaktori mähis K pingestatuks ka pärast seda kui surunupplüliti SK vabastatakse ja selle kontakt avaneb. Mootori väljalülitamiseks tuleb vajutada surunupplülitile SP, mille kontakti avanemisel katkeb kontaktori mähise K toiteahel ning kontaktori kontaktid K1 ja K2 avanevad. Mootor seiskub vaba väljajooksuga. Mootori kaitse liigkoormuse ja lühiste eest tagatakse sulavkaitsmete ja/või kaitselülitiga.
3~ M
F1…F3
Q
V U W
K1
N
SP SK K
K2
Juhtnupp
Kontaktor
Sulavkaitse
Relee
Joonis 4.1. Asünkroonmootori lihtne käivitus-peatamislülitus ja selles kasutatavad komponendid
Toitevõrkudes kasutatakse kolmefaasilise süsteemi puhul 5-juhilist juhistikusüsteemi, milles peale liinijuhtide L1, L2, L3 on kasutusel neutraaljuht N ja maandusjuht PE (protection earth). Tähtühenduse puhul ühendatakse neutraaljuht mõnikord tähe keskpunktiga (nt pingete sümmeetria tagamiseks). Maandusjuht ühendatakse inimeste ohutuse tagamiseks
111

elektrimasina või muu elektriseadme kerega (joonis 4.2). Elektrimasina staatorimähis võib olla ühendatud kas täht- või kolmnurklülitusse. Tähtühenduse puhul toidetakse faasimähist faasipingega, kolmnurkühenduse puhul liinipingega. Kuna liinipinge on faasipingest 3 korda suurem, siis on ka kolmnurklülituses faasimähise vool sama võrgupinge juures 3 korda suurem kui tähtlülituse puhul. Et vältida masina riknemist, tuleb mootori valikul ja paigaldamisel jälgida tema mähiste lülitust ning sellele vastavat nimipinget.
U1 V1 W1
L1
U2 V2 W2
L2
L3
U1 V1 W1
L1
U2 V2 W2
L2
L3
Kaitselüliti KaitselülitiN PE
N PE
Joonis 4.2. Vahelduvvoolumasina staatorimähiste täht- ja kolmnurklülitus Reversiivne ehk mõlemasuunalise pöörlemisega mootori otselülitus toitevõrku on näidatud joonisel 4.3. Mootori ja juhtnuppude toiteahelad pingestatakse lülitiga Q, milleks tavaliselt on kaitselüliti. Mootori käivitamine edasisuunas toimub vajutamisega surunupplülitile SK1, mis sulgeb kontaktori lülitusmagneti mähise K1 vooluahela. Kontaktori jõukontaktid K1.1 ja abikontakt K1.2 sulguvad ning mootor käivitub. Tänu abikontakti K1.2 sulgumisele jääb kontaktori mähis K1 pingestatuks ka pärast seda kui surunupplüliti SK1 vabastatakse ja selle kontakt avaneb. Mootori väljalülitamiseks tuleb vajutada surunupplülitile SP, mille kontakti avanemisel katkeb kontaktori mähise K1 toiteahel ning kontaktori kontaktid K1.1 ja K1.2 avanevad. Mootori toiteahel katkeb ja mootor seiskub vaba väljajooksuga. Mootori käivitamine tagasisuunas toimub vajutamisega surunupplülitile SK2, mis sulgeb kontaktori lülitusmagneti mähise K2 vooluahela. Kontaktori jõukontaktid K2.1 ja abikontakt K2.2 sulguvad ning mootor käivitub. Pöörlemine vastassuunas saavutatakse faasijärjestuse muutmisega. Abikontakti K2.2 sulgumise tõttu jääb kontaktori mähis K2 pingestatuks ka pärast seda kui surunupplüliti SK2 vabastatakse ja selle kontakt avaneb. Mootori väljalülitamiseks tuleb vajutada surunupplülitile SP, mille kontakti avanemisel katkeb kontaktori mähise K2 toiteahel ning kontaktori kontaktid K2.1 ja K2.2 avanevad. Mootori toiteahel katkeb ja mootor seiskub vaba väljajooksuga. Edasisuuna nupplüliti kontakt SK1.2 on mehaaniliselt seotud sama nupu kontaktiga SK1.1. Tänu sellele tekitatakse elektriline blokeering, mis ei võimalda samaaegselt sisse lülitada kahte kontaktorit korraga (mille tagajärjel tekiks toiteahela lühis), sest edasisuuna nupu vajutamisel katkestab kontakt SK1.2 teise kontaktori mähise K2 toiteahela. Sama toimub ka vastupidi. Tagasisuuna nupplüliti vajutamisel katkestab kontakt SK2.2 esimese kontaktori mähise K1 toiteahela. Oluline veel see, et konkureeriva ahela katkestamine toimuks enne
112

soovitud ahela sulgumist. Mootori kaitse liigkoormuse ja lühiste eest tagatakse sulavkaitsmete ja/või kaitselülitiga.
M
F1…F3
Q
V U W
K1.1 K2.1
N
SP SK1.1 K1
K2.2
SK2.2
K2 SK2.1
SK1.2
K1.2
NKR
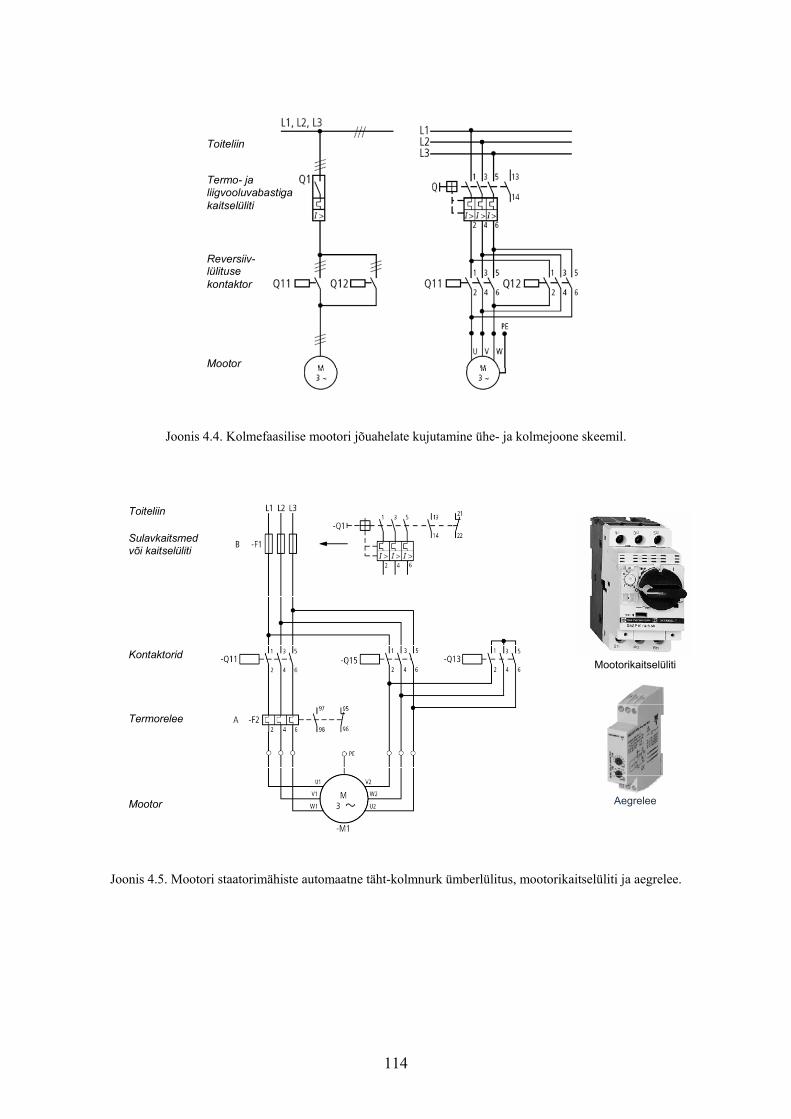
Joonis 4.3. Asünkroonmootori reversiivne otselülitus toitevõrku Reversiivset lülitust võidakse kasutada ka asünkroonmootori vastulülituspidurduseks. Seejuures tuleb arvestada, et pöörleva masina faasijärjestuse muutmisel tekib staatorimähistes suur (5…7 kordne) nimivool. Mootor pidurdub järsult, kuid mootori peatamiseks tuleb selle nullkiirusel toitepinge välja lülitada. Käsitsi on nullkiirushetke tabamine mootori peatamiseks praktiliselt võimatu. Selleks otstarbeks saab kasutada mootori võllile ühendatud nullkiirusreleesid, mille kontaktid lülituvad kiiruse nullhetkel ümber ning peatavad mootori. Nullkiirusrelee kontaktide ühendus mootori käivitus-peatamislülituses sõltub relee ehitusest ning antud juhul pole seda näidatud. Moodsamate ajamite puhul võivad nullkiirusrelee kontaktid olla ajamit juhtiva programmeeritava kontrolleri sisendahelas. Asünkroonmootori lihtsa otselülituse puhul tekitab kõige enam probleeme mootori kaitse. Joonistel näidatud kaitselüliti ja sulavkaitsmed ei taga alati mootori kindlat kaitset kõigis võimalikes talitlusviisides. Kolmefaasiliste vahelduvvoolumootorite jõuahelate lülitusi saab kujutada ühe- ja kolmejoone skeemidel (joonis 4.4). Esimesel juhul lisatakse faaside arvu tähisena ühendustele kolm rööpset kriipsu. Joonisel 4.4 on näidatud eraldi kaitselüliti termo- ja liigvooluvabastid. Joonisel 4.5 on näidatud vahelduvvoolumootori staatorimähise täht-kolmnurk ümberlülitusskeem. Tähtlülituse korral on suletud kontaktori Q11 ja Q13 kontaktid, kolmnurklülituse puhul aga kontaktorite Q11 ja Q12 kontaktid. Jõuahelasse lülitatud sulavkaitsmete ja termorelee asemel võib kasutada ka termo- ja liigvooluvabastiga kaitselülitit.
113
Toiteliin
Termo- ja liigvooluvabastiga kaitselüliti
Reversiiv-lülituse kontaktor
Mootor
Joonis 4.4. Kolmefaasilise mootori jõuahelate kujutamine ühe- ja kolmejoone skeemil.
Toiteliin
Sulavkaitsmed või kaitselüliti
Kontaktorid
Mootor
Termorelee
Mootorikaitselüliti
Aegrelee
Joonis 4.5. Mootori staatorimähiste automaatne täht-kolmnurk ümberlülitus, mootorikaitselüliti ja aegrelee.
114

Mootori juhtimine programmeeritava kontrolleriga Tänapäeval kasutatakse relee-kontaktorjuhtimise asemel sageli programeeritava kontrolleriga juhtimist. Sel juhul realiseeritakse kogu juhtimisloogika kontrolleri programmiga, kusjuures programmeerimiseks saab kasutada erinevaid mooduseid. Joonisel 4.6 on näidatud mootori käivituslülituse (a) programmeerimine loogikakontrolleris kontaktaseskeemi (b), loogika-skeemi (c) ja käsulisti (d) abil. Programmi koostaja saab valida endale kõige sobivama programmeerimismooduse, kusjuures kontrolleri valmisprogrammi saab automaatselt teisendada soovitud kujule. Käivitusnupule S1 vastab kontrolleri sisendsignaal E 0.0 ning peatamisnupule signaal E0.1. Kontaktori K1 olekule vastab kontrolleri väljundsignaal A 1.0.
a b
c
d
U ( O E 0.0 O A 1.0 ) U E 0.1 = A 1.0 END
S2
S1 K1.1
K1 ≥1
& =
E 0.0 E 0.1
A 1.0
A 1.0
E 0.0 A 1.0
A 1.0
E 0.1
Joonis 4.6. Mootori käivituslülituse programmeerimine loogikakontrolleris: elektriskeem (a),
kontaktaseskeem (b), loogikaskeem (c) ja käsulist (d) Programmeeritav kontroller kujutab endast spetsialiseeritud mikroarvutit, mis võib olla valmistatud kompaktkontrollerina (joonis 4.7, a) või moodulkontrollerina (joonis 4.7, b). Kompaktkontroller paigaldatakse juhtimiskooste liistule, moodulkontrolleri moodulid valmistatakse trükkplaadikoostetena ning paigaldatakse kere raamis olevatesse pesadesse.
a
b
Joonis 4.7. programmeeritava kontrolleri väliskuju: kompaktkontroller (a) ja moodulkontroller (b)
115

4.2. Reostaatkäivitus, -pidurdus ja -reguleerimine Mootori voolu piiramiseks, sujuvaks kiirendamiseks ja aeglustamiseks on traditsiooniliselt kasutatud reostaatkäivitust ja reostaatpidurdust. Samuti saab reostaate kasutada mootori kiiruse reguleerimiseks. Reostaatkäivitus, -pidurdus ja -reguleerimine olid valdavalt kasutusel pooljuhtmuundurite eelsel ajal, mil masina toitepinge ja/või sageduse reguleerimine oli seotud suurte raskustega. Alalisvoolumasina reostaatkäivitust, -reguleerimist ja -pidurdust võimaldav lülitus on näidatud joonisel 4.8. Mootori ankruahelasse on lülitatud takistid R1, R2 ja R3. Ankruahela summaarne takistus . Mootori käivitusvool on pöördvõrdeline ankruahela takistusega.
321 RRRRR asuma +++=
sumaaa RUI = . Takistuse suurenemisel väheneb vooluga võrdeliselt ka mootori moment amm IkT Φ= , kus km on masina ehitusest konstant tegur Ф on magnetvoog. Mootori käivitamisel lülitatakse algul ankruga jadamisi kõik takistid ning käivitamine toimub vastavalt mootori tunnusjoonele 1, kuni vool väheneb läveni I1. Seejärel sulgub kontakt K1, ankruahela takistus väheneb ning käivitus jätkub vastavalt mootori tunnusjoonele 2. Voolu vähenemisel läveni I1 sulgub kontakt K2 ning käivitusprotsess jätkub vastavalt tunnusjoonele 3. Viimasena sulgub kontakt K3 ning mootori talitlus jätkub voolu-kiiruse loomulikul tunnusjoonel. Takistite astmelise lülitamise asemel saab kasutada ka sujuvalt liugkontaktiga reguleeritavaid takisteid. Suurtel vooludel ja võimsustel on reguleeritavate takistite kasutamine liugkontakti väikese töökindluse tõttu raskendatud. Alalisvoolumootori reostaatpidurdusel lahutatakse mootor kontakti K abil toiteahelast ning lülitatakse kontaktiga K4 sisse pidurdustakisti Rp. Pöörlev masin alustab tööd generaatorina, voolu suund muutub vastupidiseks ning kiirus väheneb vastavalt pidurdustunnusjoonele 4. Pidurdamise intensiivsus sõltub pidurdustakistuse ja ankruvoolu suurusest.
M
S
F
A1
A2
E2 E1
K1 K2 K3
R1 R2 R3
K4
Rp
a)ω
Ia In I1 I2
R1+R2+R3
R2+R3
R3
ω3
ω2
ω1
ωn
b)
1
2
3 K
Rp
Joonis 4.8. Alalisvoolumootori reostaatkäivitus või kiiruse reostaatreguleerimine
Alalisvoolumootori pöörlemissuunda saab muuta voolu suuna muutmisega kas ankru- või ergutusmähises. Selleks kasutatakse sildlülitusi (joonis 4.9). Edasisuunas pöörlemisel on suletud edasisuuna kontaktori kontaktid KE1 ja KE2 ning tagasisuunas pöörlemisel vastavalt tagasisuuna kontaktori kontaktid KT1 ja KT2. Kui samaaegselt muuta voolu suunda nii ankru- kui ka ergutusmähises, siis mootori pöörlemissuund ei muutu. See tõsiasi on nii alalis-
116

kui ka vahelduvvooluvõrgust toidetavate universaalmootorite tööpõhimõtte aluseks. Joonisel näidatud mootorite pöörlemiskiirust nimikiirusest allapoole saab reguleerida ankruahelasse lülitatud takistiga R1reg. Mootorite kiirust nimikiirusest ülespoole saab reguleerida ergutusvoolu vähendamise ja magnetvälja nõrgendamisega takistiga R2reg.
M
S1
A1
A2
KE1 KT2
KT1
R1reg
E2E1
a)
KE2
M
S2
A1
A2
KE1 KT2
KT1
E2
E1
b)
R1reg
KE2
R2reg
Uerg
R2reg
S1S2
Uerg Ua Ua
Joonis 4.9. Sõltumatu ergutusega mootori pöörlemissuuna muutmine ankrumähise (a) või ergutusmähise (b) ümberlülitamisega
Jadaergutusega alalisvoolumootori reverseeritav juhtimislülitus on näidatud joonisel 4.10. Pöörlemissuuna muutmine toimub ankrumähise ümberlülitamisega. Ergutusvoolu suund jääb seejuures samaks. Jadaergutusega mootorid on kasutusel elektersõidukite veoajamites.
M
S
A1
A2
KE1 KT2
KT1
R1reg
E2E1
a)
KE2
Ua
Joonis 4.10. Jadaergutusega mootori pöörlemissuuna muutmine ankrumähise ümberlülitamisega Reostaatkäivituse ja reostaatreguleerimise näiteks on ka faasirootoriga vahelduvvoolumootori juhtimislülitus (joonis 4.11). Mootori rootoriahelasse on lülitatud takistid R1 ja R2, mida lühistatakse kontaktidega K1, K2 ja K3. Kahe takistuse R1 + R2 jadaühendusele vastab mootori mehaaniline tunnusjoon 1 (joonis 4.8, b). Suletud kontaktide K2 puhul jääb rootoriahelasse takisti R2, millele vastab mehaaniline tunnusjoon 2. Suletud kontaktide K3 puhul on rootoriahel lühistatud millele vastab mootori loomulik mehaaniline tunnusjoon 3. Mootori reostaatkäivitamisel suletakse kontakte K1…K3 kas sõltuvalt ajast, voolust või
117

momendist. Mootori tööpunkti muutumine mehaanilistel tunnusjoontel 1…3 on joonisel näidatud nooltega.
M
S
V U W N
K1.1 K1.2
K2.1 K2.2
K3.1 K3.2
R11
R21 R22 R23
R12 R13
ω
T Tn T1 T2
R1+R2
R2
ω2
ω1
ωn
b)
1
2
3
a)
Joonis 4.11. Faasirootoriga asünkroonmootori käivitamine või kiiruse reostaatreguleerimine Faasirootoriga mootorid on peamiselt kasutusel eriti võimsates ajamites (üle 1 MW). Seepärast peavad ka rootoriahelasse lülitatud takistid ja kontaktid taluma väga suuri voolusid. Probleemiks on ka takistites eralduva soojuse hajutamine. Nende probleemide lahendamiseks kasutatakse rootoriahelas õlijahutusega reostaate ning vedelikreostaate, mille puhul takistuseks on reguleeritava pikkusega vedelikusammas. Väiksematel võimsustel valmistatakse resistorid ja reostaadid isoleeralusele keritud takistustraadist, isolaatoritele paigaldatud metallribadest või plaatidest.
Pump
Juhtimine
Koonilised elektroodid
Reguleeritav nivoo
Vedelikupaak
Vedelikreostaadi tööpõhimõte
118

4.3. Reostaat- ja impulssreguleerimine Koormuse pinge ja voolu reguleerimiseks kasutatakse reostaate ja lülititalitluses pooljuhtseadiseid. Lüliti eeliseks võrreldes pidevatoimelise regulaatoriga, nt. reguleeritava takisti või võimenditalitluses transistoriga, on väiksem energiakadu (joonis 4.12).
Ud
i1
RL
R
ir
i2
Ud
i1
RL
i2 a) b)
Joonis 4.12. Koormuse pinge ja voolu reguleerimine: a) reostaadiga, b) lülitiga Koormuse RL pinge ja voolu reguleerimisel reostaadiga R jaguneb toiteallikast tarbitav vool regulaatori ja koormusvooluks i1 = ir + i2. Kui reguleerida koormuse pinget pooleni (q = 0,5) toiteallika pingest, on regulaatori poolt tarbitav võimsus võrdne koormusele langeva võimsusega, s.t. pool tarbitavast energiast läheb kaduma regulaatoris.
( ) ( ) ( ) 22
222
221 11 iRiRqiiRqiRqiRqP Lrrrreg =−++=−+= . (4.1)
Sama võimsusbilanss kehtib ka siis, kui regulaatorina kasutatakse pidevtalitluses transistori. Järelikult, võimsuse (s.t. pinge ja voolu) pidevatoimeline reguleerimine sobib vaid juhul kui tarbitav võimsus on väike ning sellest tulenevalt pole ka kadude suurus oluline. Jõuseadmete puhul tekivad pidevatoimelisel reguleerimisel alati suured kaod, mistõttu pidevreguleerimist püütakse vältida. Niisugune reguleerimisviis on jäänud kasutusele vaid üksikjuhtudel, nt. vanemat tüüpi alalisvooluajamites, kus mootori ankruahelasse on lülitatud reostaadid. Tänapäeval on energiasäästu saavutamiseks peaaegu kõikides jõuseadmetes hakatud rakendama koormuspinge ja -voolu impulssreguleerimist lüliti abil. Levinum impulssreguleerimise viis on pulsilaiusmodulatsioon (pulse width modulation, PWM), mille puhul on konstantse sisendpinge korral regulaatori väljundpinge keskväärtus võrdeline impulsside laiusega (joonis 4.13). Sujuva reguleerimise saavutamiseks peab lüliti kommutatsioonisagedus olema küllalt suur. Niisugusteks lülititeks sobivad kõige paremine suure toimekiirusega jõupooljuhtseadised. Aktiivkoormuse sisse- ja väljalülitamisel probleeme ei teki, sest ahela pinged ja voolud on võrdelised ahela aktiivtakistusega. Hoopis tülikam on sisse- ja väljalülitada ahelaid, mis sisaldavad reaktiivkomponente, nt. energiat salvestavaid kondensaatoreid ja/või induktiivsusi. Sel juhul peab lüliti taluma suuri voolutõukeid mahtuvusliku koormuse sisselülitamisel või suuri pingeimpulsse induktiivkoormuse väljalülitamisel. Tuleb arvestada ka seda, et ideaalset aktiivkoormust pole tegelikult olemas ja igas reaalses elektiahelas on alati olemas teatud mahtuvused (nt. isolatsioonimahtuvus) ja induktiivsused (nt. juhtide puisteinduktiivsus). Lüliti kommutatsiooniprotsess on vaadeldav energiamuundusprotsessina, mil kommutatsiooni
119

kestel toimub energia ümberpaigutumine ahela ühest komponendist teise. Induktiivkoormuse puhul erineb voolukõver iL oluliselt pingekõverast (joonis 4.13)
tp ti Ukesk = ti / (ti + tp)U
t
iL
Joonis 4.13. Pulsilaiusmodulatsiooni põhimõte Näiteks, induktiivse ahela sisselülitamisel salvestatakse ahela induktiivsusesse energia WL = Li2/2 ja mahtuvusse energia WC = Cu2/2. Ahela katkestamisel toimub nende energiate ümberjaotumine ning soojusena hajumine aktiivkomponentides. Neid nähtusi tuntakse kommutatsiooni siirdeprotsessidena (joonis 4.14). Need protsessid võivad olla nii võnkelise (1) kui ka aperioodilise (2) iseloomuga sõltuvalt ahela RLC parameetritest. Niisuguste siirdeprotsesside tulemusena moondub nelinurkimpulsside kuju ning tekivad muundurites kommutatsioonikaod. Kuna võnkeliste protsesside puhul võib pinge kahekordistuda, tekib pooljuhtmuundurites kommutatsioonist põhjustatud liigpingete oht. Seepärast on jõupooljuhtlülitid varustatud mitmesuguste (liigpinge)kaitseahelatega (snubber circuit), mille ülesandeks on kommutatsioonienergia summutamine või ümberjaotamine ahela teistele komponentidele.
1
t
2
Joonis 4.14. Kommutatsiooni siirdeprotsessid
Kommutatsiooniprotsesside iseloom ja jõupooljuhtlülitite ehitus sõltuvad suurel määral kasutatavast toitepingest (kas alalis- või vahelduvpinge), koormusest (aktiiv-, induktiiv-, mahtuvus- või elektromotoorjõu generaatorkoormus), toite- ja koormusahela faaside arvust (ühe- või kolmefaasiline toide), kasutatavate jõupooljuhtseadiste liigist, aga samuti nende kaitse- ja juhtimisahelatest. Võimalike variantide mitmekesisuse tõttu on kasutusel väga erinevad jõupooljuhtidel põhinevad jõuahelate lülitusseadmed. Liigpingekaitseahelad Lüliti kontaktide lahutamisel või pooljuhi (transistori, dioodi) sulgumisel tekib suur voolumuutus di/dt, mis induktiivses ahelas kutsub esile pinge u = −L di/dt. Kuna niisugune pinge võib osutuda küllaltki suureks, siis nimetatakse kommutatsiooniprotsessi tõttu tekkinud pingeimpulsse kommutatsiooni liigpingeteks. Liigpingeid saab vähendada RC-ahelatega (joonis 4.15).
120

R K
C
R K
C
RV
R
K C
V
Joonis 4.15. Liigpingekaitselülitused: a) RC-ahel, b) RC-ahel koos varistoriga, c) RCD-ahel
Jada ja rööpühendus Jada- või rööpühendust kasutatakse juhul kui muunduris jõupooljuhile langevad pinged või neid läbivad voolud ületavad tööstuslikult toodetavatele või kasutatavatele jõupooljuhtseadistele lubatud maksimaalseid pingeid või voolusid, s.t. kui üksikventiilidega pole võimalik luua nõutavate tehniliste omadustega muundurit. Jõupooljuhtide jadaühenduse puhul on suurimaks probleemiks pingete võrdse jagunemise tagamine jõupooljuhtide ahelas nii nende suletud olekus kui ka kommutatsiooniprotsessi kestel. Seepärast tuleb pinged ühtlustada nii staatilistes kui ka dünaamilistes režiimides. Suletud jõupooljuhtide pingeid saab ühtlustada rööptakistite ahelaga. Kommutatsiooniprotsessi kestel saab pingeid ühtlustada RC lülituste ahelaga, mis ühtlasi piiravad pinge kasvamise kiirust jõupooljuhtidel. Jõupooljuhtide rööpühenduse puhul tuleb valida ühesuguste päri-tunnusjoontega jõupooljuhid
R
Rr
C
Joonis 4.16. Jõupooljuhtide pingeteühtlustamine jadalülituse puhul ja võimsa dioodi välisilme Jõutüristoride jada- ja rööpühendusel on probleemid üldiselt samasugused nagu jõudioodide jada- ja rööpühenduste puhul. Peale selle on tarvis tagada mitme türistori samaaegne avanemine ja sulgumine, et üksik türistor ei peaks taluma kogu ahela pinget või voolu. Jadaühenduse puhul vähendatakse ühele türistorile langevat arvutuslikku vastupinget u. 10 % võrra. Rööpühendusel tuleb üksiku türistori arvutuslikku voolu väärtust vähendada 20 kuni 30 % võrra.
121

4.4. Pooljuhtalaldiga ajamid Alaldi abil muundatakse siinuseline vahelduvpinge pulseerivaks alalispingeks. Alaldid võivad olla tüüritavad või mittetüüritavad. Mittetüüritav alaldi koosneb dioodidest, tüüritav alaldi türistoridest või transistoridest. Kasutatakse ka osaliselt tüüritavaid alaldeid, milles osa ventiilidest on dioodid, osa türistorid. Pooljuhtmuundurite põhilülitused, sealhulgas alaldid ja vaheldid, on standardiseeritud ning neile on omistatud vastavad tähised, nt. poolperioodalaldi puhul M1. Tüüritavate alaldite väljundpinget juhitakse türistoride sisselülitamishetke ehk tüürnurga muutmisega. Vahelduvpingega toitmisel saab türistor avaneda positiivse anoodpinge olemasolu korral, s.t. pinge positiivse poollaine ajal. Türistor sulgub pärast seda kui vool türistoris on vähenenud allapoole hoidevoolu väärtust. Vahelduvvooluvõrgus toimub see pinge negatiivse poollaine ajal, mil ka vool väheneb nullini ja muudab seejärel suunda. Türistori tüürnurka määratakse siinuskõveral alates hetkest, mil antud türistoril tekib positiivne anoodpinge. Ühefaasiliste alaldite korral on selleks siinuspinge nullhetk. Kolmefaasiliste alaldite puhul sõltub faasinurga alghetk ja reguleerimisvahemik alaldi skeemist. Voolukõvera kuju, nullhetk ja sellest tulenev türistori sulgumishetk sõltuvad koormuse iseloomust. Aktiivkoormuse korral langeb voolukõver kokku pingekõveraga. Reaktiivkoormuse, nt. induktiivsuse olemasolu korral tekib pinge ja voolu vaheline faasinihe, türistorlülitiga ahelas moonutub voolukõvera kuju ning voolukõvera nullhetk saabub pingekõvera nullhetkest hiljem. Ühefaasiline poolperioodalaldi (standardtähistus M1) koosneb ainult ühest pooljuhtdioodist või -türistorist (joonis 4.17). Seda kasutatakse praktikas harva, sest tema väljundpinge pulsatsioon on väga suur. Alaldatud pinge Ua keskväärtus aktiivkoormusel sõltub tüürnurgast α vastavalt avaldisele
( ) ( απ
αππ
ωωπ
π
α
cos122coscos
2sin
21 22
2 +=+== ∫EEtdtEU m
ma ) (4.3)
Aktiiv-induktiivkoormusel (joonis 4.18) jääb türistor avatuks ka negatiivse anoodpinge korral niikauaks, kuni vool muutub nulliks. Alaldi väljundis on ka pinge negatiivse poollaine lõigud.
( ) ( αγππ
αγππ
ωωπ
γπ
α
cos)cos(22cos)cos(
2sin
21 22
2 ++=++== ∫+ EEtdtEU m
ma ) , (4.4)
kus nurk γ sõltub koormuse iseloomust – induktiiv- ja aktiivtakistuse suhtest. α
U1
I2 = Ia I1
E2
Ra La
Ua
Ue
E
Joonis 4.17. Ühefaasilise poolperioodalaldiga alalisvooluajam ja kruvikinnitusega türistor
122

Voolukõvera kuju arvutatakse diferentsiaalvõrrandist 4.5 alates ajahetkest ωα /=t .
RidtdiLtE m +=)sin(2 ω . (4.5)
tLR
mm ItIi−
⋅+−= expsin)sin( ϕϕω ,
kus RLωϕ arctan= ja
222
)( LREI m
mω+
=
ia
ua
t
ia
ua
t
t
E
t
α λ
γ
Joonis 4.18. Poolperiood alaldi väljundpinge ja –voolu diagrammid aktiiv-induktiivkoormusel (a) ning vastuelektromotoorjõu puhul (b)
Suure induktiivsusega koormuse puhul kui ωL >> R, arvutatakse pinge Ua ligikaudselt valemiga:
απ
cos2 2EUa ≅ . (4.6)
Ühefaasiline keskväljavõttega alaldi (M2). kujutab endast põhimõtteliselt kahe poolperioodalaldi M1 rööpühendust (joonis 4.19), kusjuures nende sisendpinged on vastufaasis. Alaldi väljundpinge pulseerib toitepinge kahekordse sagedusega. Tüüritav M2C tüüpi lülitus võib töötada nii reguleeritava alaldina kui ka võrguga sünkroniseeritud vaheldina. Alaldatud pinge ud keskväärtus aktiivkoormusel sõltub tüürnurgast α vastavalt avaldisele
( απ
cos12 2 +=EUa ) (4.7)
α
Uv
I21
I1
E21
α I22
E22 Ua
Ra La
Ue
EVD
Joonis 4.19. Ühefaasilise keskväljavõttega alaldiga ajam
123

Aktiiv-induktiivkoormusel (joonis 4.20) sõltub alaldatud pinge keskväärtus koormusvoolu iseloomust. Eristatakse katkevvoolutalitlust ja pidevvoolutalitlust. Katkevvoolutalitluse puhul koosnevad nii pinge- kui ka voolukõver üksikutest impulssidest, mille kestus sõltub koormusahela induktiivsusest. Pidevvoolutalitluse korral silub koormusahela induktiivsus voolu sedavõrd, et voolukõver osutub pidevaks. Väljundpinge keskväärtus aktiiv-induktiivkoormusel ja pidevvoolutalitluses arvutatakse eeltoodud valemiga (4.7). Väljundpinge ja voolu kuju mõjutab ka koormusahelas olev vastuelektromotoorjõu allikas, nt. pöörleva mootori vastuelektromotoorjõud.
ia
ua
t
ia
ua
t
t
E
t
α λ
γ
α
Joonis 4.20. Ühefaasilise keskväljavõttega alaldi pinge- ja vooludiagrammid Kolmefaasiline keskväljavõttega alaldi (M3) kujutab endast kolme ühefaasilisi alaldi rööplülitust (joonis 4.21), kusjuures neid alaldeid toidetakse kolmefaasilise toitevõrgu eri faasidest. Märkigem, et kolmefaasilise süsteemi faasipinged on üksteise suhtes 120° võrra nihutatud.
α
u1
i11 i21
ua
e21
i13
i12 α
αe23
e22i22
i23
V1
V2
V3
Ra La
Ue
E
VD
ia
Joonis 4.21. Kolmefaasilise keskväljavõttega alaldiga ajam Induktiivse koormuse korral jätkub vool türistoris ka pärast seda kui pinge türistoril on muutnud oma märki. Seetõttu ei sulgu türistor pinge nullhetkel, vaid jääb avatuks ka pärast seda. Näiteks joonisel 4.21 jääb türistor V1 avatuks ka pärast seda kui järgmine türistor V2 sisse lülitatakse. Voolu üleminekut ühest türistorist teise nimetatakse alaldi kommutat-siooniprotsessiks (joonis 4.22). Kuna kahe faasi türistorid on korraga avatud, on sisuliselt tegemist kahe faasi lühisega ning väljundpingeks on kahe faasipinge aritmeetiline keskmine väärtus. Kommutatsiooniprotsessi kestus sõltub ahela induktiivsusest ning voolu suurusest. Protsessi tulemusena väheneb ka alaldi väljundpinge keskväärtus. Alljärgnevalt on esitatud mõned olulised kolmefaasilise keskväljavõttega alaldi tehniliste näitajate arvutusvalemid.
124

ia ia
t
t
E
t2π/3
ua
t
α = π/3
2π/3 2π/3
ua
t
α
2π/3 2π/3 2π/3
V1 V2 V3 V3
μ
Joonis 4.22. Kolmefaasilise keskväljavõttega alaldi M3 pingete ja voolude diagrammid aktiiv-induktiivkoormusel, kui α =60º , μ =0º (a) ning α =40º , μ =20º (b)
Ventiili voolu kesk- ja efektiivväärtus
3a
VkeskII = ;
32a
VefIII == . (4.8)
Vastupinge suurim väärtus ventiili suletud olekus võrdub liinipinge amplituudväärtusega. Ventiili vastupinge sõltuvalt dioodalaldi väljundpingest (mootori ankrupingest)
aVvp UU3
2π= (4.9)
Toitetrafo sekundaarpinge
aUE63
22
π= (4.10)
Toitetrafo primaarpinge ja primaarvool ideaalse trafo korral
aUwwEU63
221
π== ;
wII a
32
1 = (4.11)
Toitetrafo sekundaarvõimsus
aaa
a IUIUS 48,1363
232 ≈=π (4.12)
Toitetrafo primaarmähise näivvõimsus
aaa
a IUw
IUwS 21,1263
231 ≈=π (4.13)
Trafo nimivõimsus on sekundaar- ja primaarvõimsuse aritmeetiline keskmine. Alaldi M3 võimsustegur
83,021,11cos
1
===S
IU aaϕ (4.14)
125

Ühefaasiline sildalaldi (B2) on vaadeldav kahe ühefaasilise keskväljavõttega alaldi jadalülitusena (joonis 4.23), kusjuures kaks ventiili on ühise katoodiga ja ülejäänud kaks ühise anoodiga lülituses.
α α
α α
up
is ip
us
Ua
Ra La
Ue E
VD
V1 V3
V2V4
Joonis 4.23. Ühefaasilise sildalaldiga ajam
ia
ua
tia
ua
t
t
E
t
α λ
γ
a b
Joonis 4.24 Ühefaasilise sildalaldi B2 pingete ja voolude diagrammid
kui tüürnurk α=90°: aktiiv-induktiivkoormusel (a) ja vastuelektromotoorjõu korral (b) Ühefaasilise sildalaldi ventiili vastupinge on alaldiga M2 võrreldes 2 korda väiksem sest ventiilid töötavad paarikaupa jadamisi. Ventiili voolu kesk- ja efektiivväärtus
2a
VkeskII = ;
2a
VefII = . (4.15)
Trafo võimsus
( απ
cos1211,1 221 +==
UIUSS aa ) (4.16)
Alaldi B2 võimsustegur
9,011,11cos
1
===S
IU aaϕ (4.17)
126
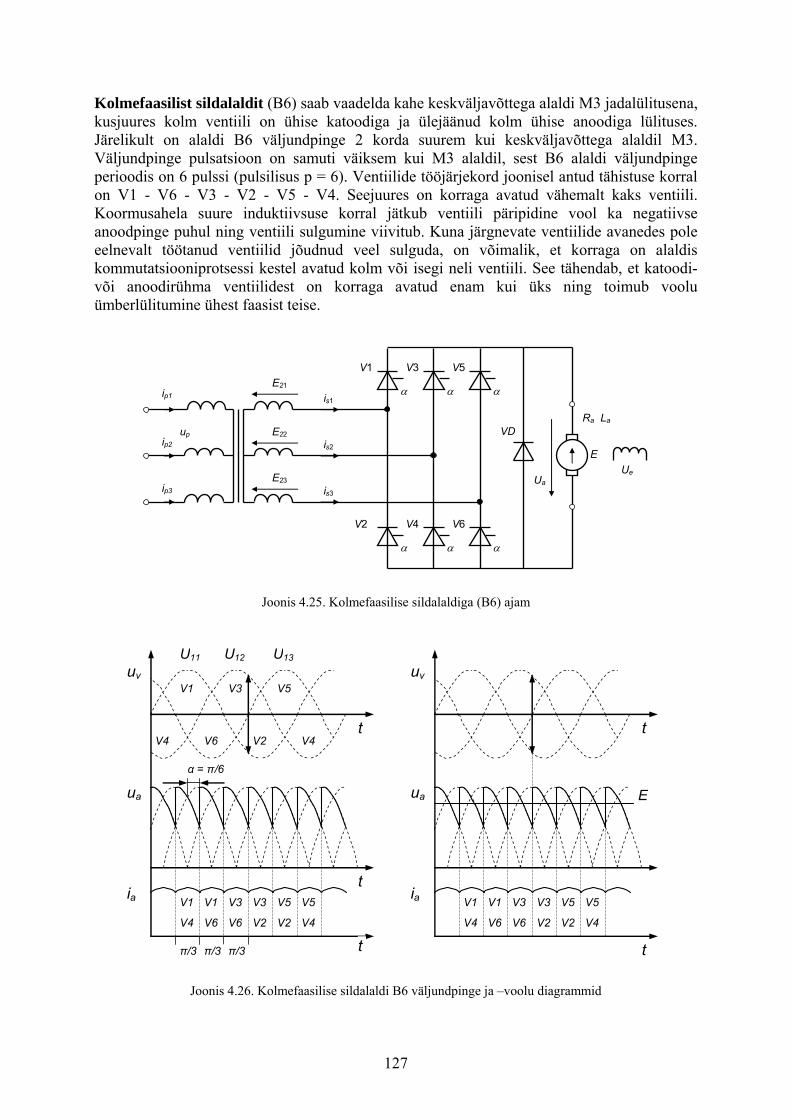
Kolmefaasilist sildalaldit (B6) saab vaadelda kahe keskväljavõttega alaldi M3 jadalülitusena, kusjuures kolm ventiili on ühise katoodiga ja ülejäänud kolm ühise anoodiga lülituses. Järelikult on alaldi B6 väljundpinge 2 korda suurem kui keskväljavõttega alaldil M3. Väljundpinge pulsatsioon on samuti väiksem kui M3 alaldil, sest B6 alaldi väljundpinge perioodis on 6 pulssi (pulsilisus p = 6). Ventiilide tööjärjekord joonisel antud tähistuse korral on V1 - V6 - V3 - V2 - V5 - V4. Seejuures on korraga avatud vähemalt kaks ventiili. Koormusahela suure induktiivsuse korral jätkub ventiili päripidine vool ka negatiivse anoodpinge puhul ning ventiili sulgumine viivitub. Kuna järgnevate ventiilide avanedes pole eelnevalt töötanud ventiilid jõudnud veel sulguda, on võimalik, et korraga on alaldis kommutatsiooniprotsessi kestel avatud kolm või isegi neli ventiili. See tähendab, et katoodi- või anoodirühma ventiilidest on korraga avatud enam kui üks ning toimub voolu ümberlülitumine ühest faasist teise.
up
ip1 is1
E21
ip3
ip2
E23
E22 is2
is3
α
α α α
α α
V2
V1
V6V4
V5V3
Ua
Ra La
Ue E
VD
Joonis 4.25. Kolmefaasilise sildalaldiga (B6) ajam
ia ia
t t
α = π/6
π/3 π/3π/3
t
t
uv
ua
t
uv
ua E
U11 U12 U13
V1 V1 V3 V3 V5 V5
V4 V6 V6 V2 V2 V4
V1 V5 V3
V6 V2 V4 V4
V1 V1 V3 V3 V5 V5
V4 V6 V6 V2 V2 V4
Joonis 4.26. Kolmefaasilise sildalaldi B6 väljundpinge ja –voolu diagrammid
127

Kolmefaasilise sildalaldi ventiili vastupinge on alaldiga M3 võrreldes 2 korda väiksem, sest ventiilid töötavad paarikaupa jadamisi. Ventiili voolu kesk- ja efektiivväärtus
3a
VkeskII = ;
32a
VefIII == . (4.15)
Trafo nimivõimsus
aa IUSS 05,121 == (4.16) Alaldi B6 võimsustegur
95,005,11cos
1
===S
IU aaϕ (4.17)
Kolmefaasilisi sildalaldeid kasutatakse nende heade tehniliste omaduste (väike pulsatsioon, suur võimsustegur) tõttu kõige enam. Tänapäeval kasutatakse türistoridel põhinevaid sildalaldeid eelkõige väga võimsate alalisvooluajamite toiteks. Väiksema võimsusega ajamites kasutatakse mittejuhitavaid dioodalaldeid ning pinge reguleerimiseks eraldi pulsilaiusmuundureid. Mittetüüritavad dioodidel põhinevad sildalaldid on kasutusel ka alalisvoolu vahelüliga sagedusmuundurites. Dioodalaldite eeliseks on kindlasti nende lihtne ehitus ja väike hind, kuid puuduseks asjaolu, et need ei võimalda energiat võrku tagastada (nt. ajami generaatoritalitluse puhul). Tüüritavad alaldid võimaldavad energiat võrku tagastada, kui nende juhtimisel valida selleks sobiv tüürnurga väärtus. Väärib märkimist, et kolmefaasiline sildlülitus on kasutusel ka vaheldite põhilülitusena, kusjuures kommutatsioonielementideks sobivad nii türistorid kui ka transistorid. Seepärast võib väita, et sildlülituse näol on tegemist jõupooljuhttehnikas väga levinud universaalse muundusskeemiga, mida saab rakendada nii vahelduvpinge alaldamiseks kui ka alalispinge vaheldamiseks. Andmeid ajami toitetrafo ja alaldi ventiilide valikuks
Tabel 4.1. Trafo sekundaarpinge ja –vool
ning trafo võimsus Ventiili
pinge ja vool Alaldi tüüp
E2/Ua I2/Ia ST/Pa (η)? Uv max/Ua Iv/IaÜhefaasiline poolperioodalaldi M1
2,23 1 3,09 3,14 1
Ühefaasiline keskväljavõttega alaldi M2
1,11 0,707 1,48 Akt 1,35
3,14 0,5
Ühefaasiline sildalaldi B2
1,11 1,11 1,23 1,57 0,5
Kolmefaasiline keskväljavõttega alaldi M3
0,855 0,583 1,35 2,1 0,33
Kolmefaasiline sildalaldi B6
0,427 0,817 1,05 1,05 0,33
128

4.5. Vahelduvpingeregulaatoriga ajam Vahelduvpingeregulaator muundab pooljuhtlüliti abil võrgupinge efektiivväärtust. Selleks, et juhtida vahelduvvoolu, kasutatakse vahelduvpinge regulaatoris kahesuunalisi (nt. sümistore) või vastuparalleelselt ühendatud pooljuhtventiile (tavaliselt türistore). Ühefaasilisi vahelduvpingeregulaatoreid kasutatakse laialdaselt kodumasinate ja tööriistade, nt. elektritrellide, pesumasinate, tolmuimejate jms. universaalmootoritega ajamite kiiruse reguleerimiseks. Samuti kasutatakse vahelduvpingeregulaatoreid valgustuse reguleerimiseks. Vahelduvpingeregulaatorite peamiseks rakenduseks võimsates ajamites on sujuvkäivitid. Ühefaasiline vahelduvpingeregulaator (joonis 4.27, a) koosneb kahest vastuparalleelselt ühendatud türistorist. Pinge väärtust koormusel muudetakse türistoride avamishetke reguleerimisega faasijuhtimise põhimõttel. Suletavate pooljuhtventiilide puhul saab vahelduvpingeregulaatori juhtimiseks kasutada pulsilaiusmodulatsiooni põhimõtet. Kolmefaasiline vahelduvpingeregulaator (joonis 4.27, b) koosneb kolmest ühefaasilisest regulaatorist. Kasutatavatest skeemidest on enam levinud W3C regulaatori skeem. Kui koormuse keskpunkt on ühendatud neutraaljuhiga N, on kolmefaasilise pingeregulaatori reguleerimiskarakteristik identne ühefaasilise vahelduvpingeregulaatori omaga. Kui ühendust neutraaljuhiga pole, peavad türistorid voolu tekitamiseks sisse lülituma paarikaupa, mis tunduvalt halvendab reguleerimisomadusi.
~U N
α α
L N
α
~3 U1
α
L1
α
L2
Ls
α
L3
α α
Rs Es
R
L
i2
E1
3~M
Joonis 4.27. Vahelduvpingeregulaatorid: a) ühefaasiline, b) kolmefaasiline Kolmefaasiliste pingeregulaatorite põhiliseks kasutusalaks on kontaktivabad lülitid (kontaktorid) ja asünkroonmootorite sujuvkäivitid. Kontaktivabade lülitite peamiseks eeliseks võrreldes tavaliste kontaktoritega on suur lülitussagedus ning sädemevaba (kaarevaba) kommutatsiooniprotsess. Viimane on eriti oluline tuleohtlikus keskkonnas paigaldatavate elektriseadme puhul. Vahelduvpingeregulaatori pinge ja vooludiagrammid on näidatud joonisel 4.28. Ahelas tekib vool pärast trüristor avanemist. Tüürnurk α määrab voolukõvera pinge ja voolukõverate vahelise nihke. Induktiivkoormuse puhul jääb vool pinge suhtes veelgi enam maha. Seega suurendab vahelduvpinge regulaator reaktiivenergia tarbimist ja lisakadusid toitevõrgus.
129

iv
uv
tiv
uv
t
t
E
t
α λ
γ
φ
λα
Joonis 4.28. Vahelduvpingeregulaatori väljundpinge ja –voolu diagrammid erinevate tüürnurkade puhul Joonisel 4.29 on näidatud pingeregulaatoriga sujuvkäiviti kasutamine kahe asünkroonmootori üheaegse käivitamise lülituses. Mõlemat mootorit toidetakse ühisest toitevõrgust läbi liigvooluvabastiga kaitselüliti ja kontaktori kontaktide ning sujuvkäiviti. Mootorite liigkoormuskaitse on realiseeritud eraldi termoreleedega.
Toitevõrk Liigvooluvabastiga kaitselüliti või sulavkaitsmed Kontaktor Sujuvkäiviti Liigkoormuskaitse termoreleed Mootorid
Joonis 4.29. Kahe asünkroonmootori ühise sujuvkäivitiga rööpkäivituslülitus
130

4.6. Alalisvoolu pingemuundurid ja -regulaatorid Alalispinge regulaatoreid (muundureid) liigitatakse sõltuvalt väljundvoolu ja -pinge polaarsusest (märgist) ning volt-amper-tunnusjoonte kujust kas ühe-, kahe- või neljakvadrandilisteks muunduriteks. See tähendab, et nende volt-amper-tunnusjooned hõlmavad vastavalt üks-, kaks- või neli U-I tasandi kvadranti.
Ühesuunalise voolu ja ühepolaarse pingega (emj-ga) ehk ühekvadrandiline pulsilaiusmuundur (joonis 4.30) võimaldab reguleerida pinget toitepingest allapoole. Seetõttu nimetatakse seda muundurit pinget vähendavaks muunduriks (buck-converter, step-down converter). Muundurit kasutatakse ühesuunaliselt pöörleva mootoritalitluses töötava alalisvoolumasina toiteks. Märkigem, et alalisvoolumootorit võib aseskeemil kujutada aktiiv-induktiivtakistuse R-L ja vastuelektromotoorjõu allika EL jadalülitusena.
RL
EL
PL
C
LL
Ud1 VD
id2id1
Ud2
Kontuur 1
Kontuur 2
Joonis 4.30. Ühekvadrandiline alalispinge pulsilaiusmuundur (PL + VD) koos toite- ja koormusahelatega
Ühekvadrandiline pulsilaiusmuundur koosneb pooljuhtlülitist PL ja vabavooludioodist VD. Seejuures tähistab pooljuhtlüliti täielikult juhitavat jõupooljuhtlülitit, nt. transistori, GTO türistori või SCR türistori koos sulgeahelatega. Lihtsuse huvides võib lugeda pooljuhtlüliti takistuse sisselülitatud olekus nulliks ja väljalülitatud olekus lõpmatu suureks. Samuti on dioodi takistus pärisuunas null ja tõkkesuunas lõpmatu suur. Pooljuhtlüliti oleku muutumine toimub hetkeliselt. Nii toite- kui ka koormusahel koosnevad aktiiv-induktiivtakistustest ja elektromotoorjõu allikatest. Lüliti ahelasse, toite ja koormuse vahele lülitatakse tavaliselt ka LC-filter, mis vähendab lüliti poolt tekitatud kõrgsagedusliku pulsatsiooni mõju toiteahelale (toitevõrgule). Pooljuhtlülitit juhitakse pulsilaiusmodulatsiooni põhimõttel (vt. p. 4.1). Kui PL on sisse lülitatud ja toiteallika emj on suurem kui koormuse vastu emj. (mis oli ühekvadrandilise muunduri talitluse puhul eelduseks), siis tekib koormuses positiivne vool (kontuur 1) id2 = id1, sest dioodil VD on vastupinge ja diood voolu ei juhi. Voolu kasvamise kiirus on määratud pinge ja ahela aktiiv-induktiivtakistustega. Ahela väljalülitamisel vool läbi PL katkeb. Samas ei saa induktiivsust sisaldava koormusahela vool muutuda hetkeliselt nulliks, sest induktiivsuses salvestatud energia ei kao ja see tuleb muundada. Koormusvool lülitub ümber vabavooludioodi ahelasse (kontuur 2) ning induktiivsuse energia muundub koormuse aktiivtakistuses soojuseks. Kui 2. kontuuri vool sumbub nulliks enne kui lüliti PL taas sulgub, tekib ahelas katkevvoolutalitlus. Piir pidev- ja katkevvoolutalitluse vahel sõltub toite- ja koormusahela parameetritest ning lüliti suhtelisest lülituskestusest.
131

Pinget vähendava alalispingemuunduri väljundtunnusjooned sõltuvalt impulsi suhtelisest kestusest q on näidatud joonisel 4.31. Koormusvoolu vähenemisel läheb muundur pidevvoolutalitlusest katkevvoolutalitlusse ning pinge hakkab järsult suurenema. Põhjuseks on asjaolu, et pärast voolu katkemist ja dioodi sulgumist sõltub sekundaarahela pinge koormuse vastuelektromotoorjõust. Mootori tühijooksukiirust ei määra mitte impulsspinge keskväärtus vaid amplituudväärtus. Seepärast hakkab tühijooksul töötava mootori kiirus impulssmuundurist toitmisel kasvama, kuni vastuelektromotoorjõud muutub amplituudpingele vastavaks. Protsess on võrreldav kondensaatori lülitamisega impulssmuunduri väljundisse. Sel juhul kasvab kondensaatori pinge koormuse (tühjendusvoolu) puudumisel samuti amplituudpingeni.
Id
Ud
0
Katkevvoolupiir
q = 0,1
q = 0,3
q = 0,5
q = 0,7
Joonis 4.31. Pinget vähendava alalispingemuunduri väljundtunnusjooned Pinget suurendav pulsilaiusmuundur (boost converter) võimaldab saada muunduri väljundis toitepingest suuremat pinget (joonis 4.32). Niisuguseid muundureid kasutatakse nt. aktiivfiltrites ja reaktiivvõimsuse kompensaatorites. Pinget suurendava alalispingemuunduri skeem on näitena esitatud joonisel .
RL
EL
PL C
LL
Ud1
VDid2id1
Ud2
C
L
Kontuur 1
Kontuur 2
Joonis 4.32. Pinget suurendav alalispingemuundur Kui pooljuhtlüluiti Pl juhib voolu (kontuur 1), siis salvestub osa toiteallika energiast induktiivsuse L magnetväljas. Kui pooljuhtlüliti katkestab ahela, siis kommuteerub induktiivsuse vool läbi dioodi VD koormusele ja kondensaatorile C (kontuur 2) ning induktiivsuse magnetväljas salvestunud energia WL = Li2/2 muundatakse mahtuvuse elektrivälja energiaks WC = Cu2/2. Muunduri väljundpinge sõltub pooljuhtlüliti suhtelisest
132

lülituskestusest. Väljundpinge võrdub sisendpingega, kui PL on pidevalt välja lülitatud (ei juhi voolu). PL kommuteerimisel saab väljundis oleva kondensaatori pinget tõsta induktiivsusest saadava lisaenergia arvelt. Lüliti PL sulgemisel vool induktiivsuses L kasvab. Pärast lüliti avamist laetakse kondensaatorit suurema vooluga ning pinge sellel kasvab. Vajalik induktiivsus ja kondensaatori mahtuvus
( )min2
22
21
12 2 dad
ddad I
TUU
UUL −= ; 22
max2
ad
d
UIT
CΔ
≥ (4.18)
Vool Id2 ei tohi olla väiksem minimaalsest voolust
( )L
TUU
UUIad
ddadd 22
2
21
12min2 −= (4.19)
Kui ühendada pinget vähendav alalispingemuundur jadamisi pinget suurendava muunduriga, saadakse alalispingemuundur, mis võib pinget nii vähendada kui ka suurendada (buck-boost converter). Niisuguse universaalmuunduri üheks variandiks on ka pinge polaarsust pöörav muundur (cuk converter).
Sildalaldi
IGBT moodul
Firma ABB alalisvooluajamid võimsusega 10 kW kuni 4,9 MW
133

4.7. Pingemuunduriga alalisvooluajam Muudetava voolusuunaga kahekvadrandilise pulsilaiusmuunduriga ajam. Eespool kirjeldatud alalispingemuundureid saab kasutada ainult ühes suunas pöörleva ja mootoritalitluses töötava ajami puhul (ühekvadrandiline muundur). Selleks, et tagastada toiteahelasse mootori elektrilisel pidurdamisel genereeritavat energiat, tuleb muuta voolu suunda pooljuhtlülitis. Kahekvadrandiline muundur (joonis 4.33) koosneb kahest eraldi muundurist: pinget vähendavast muundurist PL2 ja D2 ning pinget suurendavast muundurist PL1, D1. Mootoritalitluses töötab pinget vähendav muundur PL2, D2. Pooljuhtlüliti PL1 on pidevalt välja lülitatud (ei juhi voolu). Samuti on suletud vastupingestatud diood D1. Generaatoritalitluses töötab pinget suurendav muundur (PL1, D1), mis võimaldab suunata energiat tagasi toiteallikasse.
PL2
Ud1
id2id1
Ud2
PL1
D1
D2
Ua
Ra La
Ue
E
Joonis 4.33. Muudetava voolusuunaga kahekvadrandilise pingemuunduriga alalisvooluajam Muudetava pingepolaarsusega kahekvadrandilise muunduriga ajami skeem on näidatud joonisel 4.34. Pooljuhtlülitid PL1 ja PL2 lülitatakse koos sisse ja välja. Vool koormuses on alati ühesuunaline. Masinapöörlemissuuna muutumisel, muutub ka elektromotoorjõu märk ja pinge polaarsus masina klemmidel, kuid voolu suund jääb endiseks.
Ra
PL2
La
Ud ia
id1
Ua
PL1
D1
D2
E
Ue
Joonis 4.34. Muudetava polaarsusega kahekvadrandilise pingemuunduriga alalisvooluajam
134

Neljakvadrandiline pulsilaiusmuunduriga ajamis saab muuta nii voolusuunda kui ka reguleerida kahepolaarset väljundpinget. Sisuliselt kujutab neljakvadrandiline muundur endast kahe kahekvadrandilise alalispingemuunduri ühislülitust. Neljakvadrandilist muundurit (joonis 4.35) nimetatakse ka reversiivseks (pööratavaks) alalispingemuunduriks. Seda kasutatakse muudetava pöörlemissuunaga ehk reversiivsetes elektriajamites. Mootoritalitluses töötamisel on mootori elektromotoorjõud toiteallika pingest väiksem EL < Ud. Muunduri pinget ja mootori kiirust reguleeritakse pooljuhtlülititega PL1, PL2. Pooljuhtlülitid PL3, PL4 on pidevalt väljalülitatud. Sisselülitatud lülitite PL1, PL2 korral läbib mootorit kasvav positiivne vool. Kui neist üks lüliti välja lülitada jätkub mootoris samasuunaline kahanev vool läbi dioodi D1 või D2. Mootori pöörlemissuuna muutmiseks tuleb muuta pinge ja voolu suunda. Selleks lülitatakse pooljuhtlülitid PL1 ja PL2 välja ning lülitid PL3 ja PL4 sisse.
PL4
Ud
id1
PL3
D3
D4
PL1
PL2D1
D2
RaLaia
Ua
E
Ue
Joonis 4.35. Neljakvadrandilise pingemuunduriga alalisvooluajam Generaatoritalitluses jääb pinge suund samaks, kuid muutub voolu suund mootoritalitlusega võrreldes. Joonisel näidatud pinge suuna puhul avanevad dioodid D3 ja D4 ja voolude id1 ja id2 suund muutub joonisel näidatuga vastupidiseks. Neljakvadrandilise muunduri talitlust, mil korraga töötavad ainult kaks pooljuhtlülitit (ülejäänud kaks on välja lülitatud) nimetatakse ühepolaarseks talitluseks. Neljakvadrandilist muundurit saab kasutada ka nii, et pooljuhtlüliteid kommuteeritakse paarikaupa (PL1, PL2) ja (PL3, PL4). Sel juhul moodustub väljundis nelinurkne vahelduvpinge, mille keskväärtust saab reguleerida pooljuhtide suhtelise lülituskestusega. Pinge positiivse ja negatiive poolperioodi võrdse kestuse korral on väljundpinge keskväärtus null.
Firma ABB alalisvooluajamid DCS 400
135

4.6. Pinge- või vooluvaheldiga ajam Vaheldi muundab alalispinge vahelduvpingeks või alalisvoolu vahelduvvooluks. Vastavalt sellele eristatakse pinge- ja vooluvaheldeid. Pingevaheldi toiteallikaks on väikese sisetakistusega pingeallikas, mille tunnuseks on tavaliselt allikaga rööbiti lülitatud suure mahtuvusega kondensaator (hoiab pinge konstantsena). Pingevaheldi väljundvool kujuneb vastavalt pinge ja koormustakistuse väärtusele. Vooluvaheldi toiteallikaks on konstantse vooluga alalisvooluallikas, mille tunnuseks on jadamisi lülitatud suur induktiivsus (hoiab voolu konstantsena). Vool juhitakse pooljuhtlülitite kaudu vaheldi väljundisse. Vooluvaheldi väljundpinge on määratud väljundvoolu poolt põhjustatud pingelanguga koormusel. Vaheldit toidetakse alalisvooluallikast, milleks võib olla nii akumulaator kui ka vahelduvvooluvõrgust toidetav alaldi. Joonisel 4.36 on näidatud kolmefaasiline sildlülituses vaheldi, mida toidetakse vahelduvvooluvõrku lülitatud kolmefaasilisest sildalaldist. Alaldit ja vaheldit ühendab alalisvoolu vahelüli, millesse kuuluvad drossel Ld, kondensaator Cd, energiat summutav ehk pidurdustakisti Rp ning pooljuhtlüliti PL7. Sõltuvalt vahelüli drosseli induktiivsusest ja kondensaatori mahtuvusest võib vaheldi toiteallikas olla nii pinge- kui ka vooluallikas. Pooljuhtlülititena on joonisel näidatud isoleeritud baasiga bipolaarsed transistorid ehk IGBTd.
3~ M
Alaldi VaheldiVahelüli koos
pidurdusahelaga
Ld
Cd
Rp 3~U1
PL7
PL1
PL4
PL2
PL5
PL3
PL6
Joonis 4.36. Ühesuunalise energiavooga sagedusjuhtimisajam Kolmefaasilist sildlülituses pingevaheldit saab kasutada kolmefaasilise vahelduvvoolu-mootori toitmiseks reguleeritava sageduse ja amplituudiga pingega. Sümmeetriliste faasipingete puhul on need omavahel 120° võrra nihutatud, kusjuures eri faaside pingekõverate kuju ja amplituudid on ühesugused. Vaheldeid juhitakse plokk- või pulssjuhtimise põhimõttel. Plokkjuhtimisel moodustatakse vahelduvpinge negatiivne või positiivne poolperiood pooljuhtlüliti ühekordse avamise ja sulgemisega. Selle tulemusena tekivad väljundis nelinurksed (ristkülikukujulised) pingeplokid. Siinuselist vahelduvpinget pole plokkjuhtimisega võimalik saavutada. Voolukõver koosneb sel juhul eksponentkõvera lõikudest. Joonisel 4.37 on näidatud kuuetaktilise vaheldi väljundpinged juhul, kui korraga on avatud kaks ventiili ning poollaine kestuseks on 120 elektrilist kraadi ning juhul kui üheaegselt on avatud kolm ventiili ning poollaine kestus on 180 elektrilist kraadi.
136
0
UU
t
π
2π
a)
0
UV
t
π
2π
0
UW
t
π
2π
i u
t π 2π
b)UU
t π 2π
UV
t π 2π
UW
i u
Joonis 4.37. Kuuepulsilise kolmefaasilise plokkjuhtimisega vaheldi väljundpinged ja -voolud: a) kahe üheaegselt avatud ventiili korral, b) kolme üheaegselt avatud ventiili korral
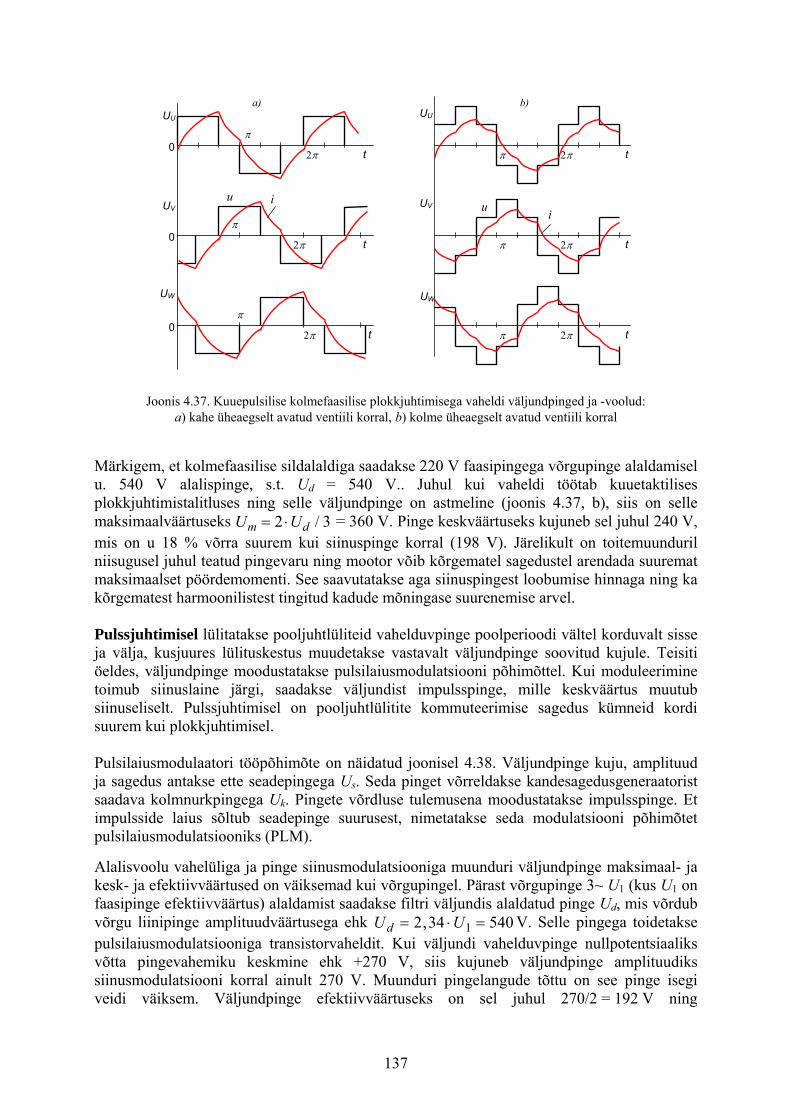
Märkigem, et kolmefaasilise sildalaldiga saadakse 220 V faasipingega võrgupinge alaldamisel u. 540 V alalispinge, s.t. Ud = 540 V.. Juhul kui vaheldi töötab kuuetaktilises plokkjuhtimistalitluses ning selle väljundpinge on astmeline (joonis 4.37, b), siis on selle maksimaalväärtuseks U = 360 V. Pinge keskväärtuseks kujuneb sel juhul 240 V, mis on u 18 % võrra suurem kui siinuspinge korral (198 V). Järelikult on toitemuunduril niisugusel juhul teatud pingevaru ning mootor võib kõrgematel sagedustel arendada suuremat maksimaalset pöördemomenti. See saavutatakse aga siinuspingest loobumise hinnaga ning ka kõrgematest harmoonilistest tingitud kadude mõningase suurenemise arvel.
Um d= ⋅2 / 3
Pulssjuhtimisel lülitatakse pooljuhtlüliteid vahelduvpinge poolperioodi vältel korduvalt sisse ja välja, kusjuures lülituskestus muudetakse vastavalt väljundpinge soovitud kujule. Teisiti öeldes, väljundpinge moodustatakse pulsilaiusmodulatsiooni põhimõttel. Kui moduleerimine toimub siinuslaine järgi, saadakse väljundist impulsspinge, mille keskväärtus muutub siinuseliselt. Pulssjuhtimisel on pooljuhtlülitite kommuteerimise sagedus kümneid kordi suurem kui plokkjuhtimisel. Pulsilaiusmodulaatori tööpõhimõte on näidatud joonisel 4.38. Väljundpinge kuju, amplituud ja sagedus antakse ette seadepingega Us. Seda pinget võrreldakse kandesagedusgeneraatorist saadava kolmnurkpingega Uk. Pingete võrdluse tulemusena moodustatakse impulsspinge. Et impulsside laius sõltub seadepinge suurusest, nimetatakse seda modulatsiooni põhimõtet pulsilaiusmodulatsiooniks (PLM). Alalisvoolu vahelüliga ja pinge siinusmodulatsiooniga muunduri väljundpinge maksimaal- ja kesk- ja efektiivväärtused on väiksemad kui võrgupingel. Pärast võrgupinge 3~ U1 (kus U1 on faasipinge efektiivväärtus) alaldamist saadakse filtri väljundis alaldatud pinge Ud, mis võrdub võrgu liinipinge amplituudväärtusega ehk U Ud = ⋅ =2 34 5401, V. Selle pingega toidetakse pulsilaiusmodulatsiooniga transistorvaheldit. Kui väljundi vahelduvpinge nullpotentsiaaliks võtta pingevahemiku keskmine ehk +270 V, siis kujuneb väljundpinge amplituudiks siinusmodulatsiooni korral ainult 270 V. Muunduri pingelangude tõttu on see pinge isegi veidi väiksem. Väljundpinge efektiivväärtuseks on sel juhul 270/2 = 192 V ning
137

keskväärtuseks 171 V. Võrdluseks olgu öeldud, et võrgu faasipinge amplituudväärtus on 311 V. Järelikult pole niisugusest sagedusmuundurist toidetav mootor nimisagedusel enam täielikult koormatav, sest toitepinge vähenemise tõttu arendab mootor ka väiksemat momenti. Asünkroonmootori sagedusreguleerimisel seaduspärasuse U/f = const. korral osutub, et mootor säilitab nimitalitlusele vastava ülekoormatavuse kuni sageduseni 45 Hz. Suurematel sagedustel hakkab mootori koormatavus toiteallika väljundpinge piiratuse tõttu vähenema.
Ue UPLM Uk
t
270 V
Joonis 4.38. Vaheldi väljundpinge moodustamine pulsilaiusmodulatsiooniga Seoses sagedusjuhtimise üha laiema levikuga elektriajamites ning kolmefaasiliste elektrimasinate tööpõhimõttega (kolmefaasiline toitepinge tekitab ruumiliselt sümmeetrilises staatorimähiste süsteemis pöörleva magnetvälja), on rakendatakse ajamites vektorjuhtimise põhimõtet. Sisuliselt tähendab see seda, et vaheldi juhtimise eesmärgiks pole mitte kolme sümmeetrilise faasipinge tekitamine, vaid niisuguse pingesüsteemi loomine, mille pinge kompleksvektor pöörleb ühtlaselt komplekstasandil. Vaheldi niisugust juhtimist nimetatakse pingevektori juhtimiseks. Kolmefaasiline sümmeetriline siinuspingete süsteem, mille faasid on komplekstasandil 120° võrra nihutatud, tagab pingevektori ühtlase pöörlemise. Vaheldi puhul jõutakse sama tulemuseni kahel viisil. Esiteks, tekitatakse kolmes faasis omavahel sümmeetriliselt nihutatud, sama kuju ja võrdse amplituudiga faasipingete süsteem ning toidetakse selle pingega kolmefaasilist elektrimasinat. Teiseks, valitakse vaheldi pooljuhtlülitite kommuteerimise niisugune järjekord, mis tekitab kolmefaasilise elektrimasina mähistes pöörleva magnetvälja. Viimast variant nimetataksegi pingevektori juhtimiseks (joonis 4.39). Sobivate pooljuhtlülitite valikuga ning nende juhtimisega pulsilaiusmodulatsiooni põhimõttel saab komplekstasandil tekitada mistahes pingevektori. Muutes kindla seaduspärasuse järgi pooljuhtlülitite valikut ja pulsilaiusmodulatsiooni tegurit saab pingevektorit soovikohaselt komplekstasandil pöörata. Võrreldes pulssjuhtimisega võimaldab pingevektori juhtimine suuremat faasipinget ja seega ka suuremat väljundvõimsust. Maksimaalne väljundpinge amplituud pulssjuhtimisel on Ud /2. Pingevektori juhtimisel on maksimaalne amplituud kuusnurgale moodustatud siseringjoone raadiusega, s.o. 3/dU . Järelikult on pingevektori juhtimisel maksimaalne pinge 15,5 % võrra suurem. (311 V asemel 360 V ja keskväärtus 198 V asemel 229 V). Seega saab tänu pinge varule suurendada mootori nimikiirust U/f = const. korral samuti 1,15 korda, kusjuures säilib sama magnetvoog ning mootori koormatavus (50 x 1,15 = 57 Hz). Pingevektori juhtimine võimaldab tekitada trapetslaine kujulise väljundpinge, mis saavutab oma maksimumväärtuse 1/6 perioodi jooksul. Sel juhul suureneb pinge keskväärtus veelgi (240 V) ning mootori toitepinge maksimaalne sagedus sama koormatavuse puhul on 60 Hz.
138

1
23
4
56 1,15 U
a) b)
56
56
56
5
Joonis 4.39. Pingevektori juhtimisega vaheldi töö: a) vektori polügoon, b) vektori reguleerimine
3~ M
Vahelüli koos pidurdusahelaga
Ld
Cd
Rp3~U1
PL7
Vaheldi
PL1
PL4
PL2
PL5
PL3
PL6
Alaldi
PL1
PL4
PL2
PL5
PL3
PL6
Joonis 4.40. Pulsilaiusmodulatsiooniga alaldiga ja kahesuunalise energiavooga sagedusmuunduriga vahelduvvooluajami jõuahel
Vahetu maatriksmuunduriga elektriajam Maatriksmuundurid ehk sundkommutatsiooniga tsüklokonverterid on vahetud sagedusmuundurid, kus alalisvoolu vahelüli puudub. Maatriksmuunduri iseloomulikuks omaduseks on see, et väljundpinge moodustatakse vahetult kolmefaasilisest sisendpingest, lülitades selleks sobival ajahetkel kordamööda väljundisse sisendpingete lainekatkeid. Väljundpinge amplituudi ja sageduse sujuvaks reguleerimiseks laias diapasoonis tuleb kasutada keerukaid ventiilide kommuteerimise seaduspärasusi.
139

3~U1 f1
3~U1f1
3~ M
Joonis 4.41. Maatrikssagedusmuunduriga elektriajami jõuahelate skeem Vooluvaheldid omavad tähtsust niisuguse elektritarviti (nt. kaarleekahju, induktsioonkuumuti vms.) toiteallikana, mille puhul on oluline juhtida voolu (mitte pinge) väärtust. Võrreldes pingevahelditega on vooluvaheldite osatähtsus väiksem, sest vajadusel saab ka pingevaheldit voolu tagasiside kasutamisega kohaldada vooluallikana. Tavatüritoridega vaheldite puhul omasid vooluvaheldid pingevaheldite ees mõningaid eeliseid türistoride lihtsama kommutatsiooni tõttu. Tänapäeval, seoses hästi juhitavate IGBT transistoride kasutamisega, on need eelised minetanud oma tähtsuse. Resonantsvaheldid koosnevad kommutaatorist ja LC võnkrringist, mille väljundist saadakse koormuse vahelduvpinge. Pooljuhtlüliteid kommuteeritakse nii, et LC-võnkering töötaks resonants läheduses, s.t. võnkeringi omavõnkesagedus on lähedane pooljuhtide kommutatsioonisagedusele. Türistorlülitite puhul on võimalik saavutada olukord kus türistorid sulguvad väljundpinge mõjul loomuliku kommutatsiooniga nii nagu võrguga sünkroniseeritud muundurites. Erinevalt viimastest on aga resonantsvaheldite väljundpinge sagedus määratud võnkeringi omavõnkesagedusega. Erinevalt autonoomsetest vahelditest ei
140

saa resonantsvaheldite sagedust reguleerida juhtimissüsteemi seadesignaaliga. Resonants-vaheldite puhul kasutatakse rööp- ja jadaresonantsil põhinevaid lülitusi, samuti ka nende kombineerimisel saadud segaresonantslülitusi. Resonantsvaheldite peamine rakendusala on elektrotermia, kus neid kasutatakse induktsioon-kuumutusseadmete toiteks. Samuti sobivad nad mikrolaineahjude ja ultraheliseadmete toiteks, kus vajatakse kõrgsageduslikke, kuid mittereguleeritavaid toiteallikaid. Kui resonantsvaheldi väljundisse lülitada alaldi, siis saadakse alalispinge resonantsmuundur. Sagedusmuundur ühendatakse toitevõrgu ja mootoriga mitmesuguste aparaatide abil. Üks võimalik lülitus on näidatud joonisel 4.42. Lisaks mootorikaitselülitile (sulavkaitsmetele) ja kontaktorile lülitatakse ahelasse toitevõrgu kaitseks kommutatsiooiprotsessidest tingitud häirete eest drossel ning raadiosageduslik võrgufilter. Neist esimene kaitseb võrku madalsageduslike, teine aga kõrgsageduslike häirete tungimise eest võrku. Muunduri ja mootori vaheline ühenduskaabel valmistatakse varjestatud soontega, et vähendada kaablist kiirguvaid kõrgsageduslikke häired.
Mootorikaitelüliti või sulavkaitsmed
Kontaktor
Drossel
Võrgufilter
Sagedusmuundur
Mootori toitekaabel
Mootor
Joonis 4.42. Sagedusmuunduri ja mootori ühendamine toitevõrku.
141