4. lecture image enhancement: filtering · edge sharpening:unsharp masking • to make edges...
TRANSCRIPT
4. Lecture
Image enhancement: Filtering
1
• Aims:
– Improvement of image data
– Suppress unwanted distortions
– Highlight interesting features
• Image preprocessing does not increase the
information content
• Best preprocessing is no preprocessing
– better: high quality image acquisition
Image preprocessing
2
Classification of preprocessing
• Point operations – Grayvalue transformations
• Local operations – Spatial filters, look at local
neighbourhoods
• Global operations – Inverse filtering
• Geometric Transformations
3
Grayvalue transformations
• Alteration of the brightness of the pixels independent of the
position in the image
• Function T to transform original grayvalue p to grayvalue q
q = T(p)
• Fast implementation possible by creation of a look-up table
• Used for interactive image viewers
4
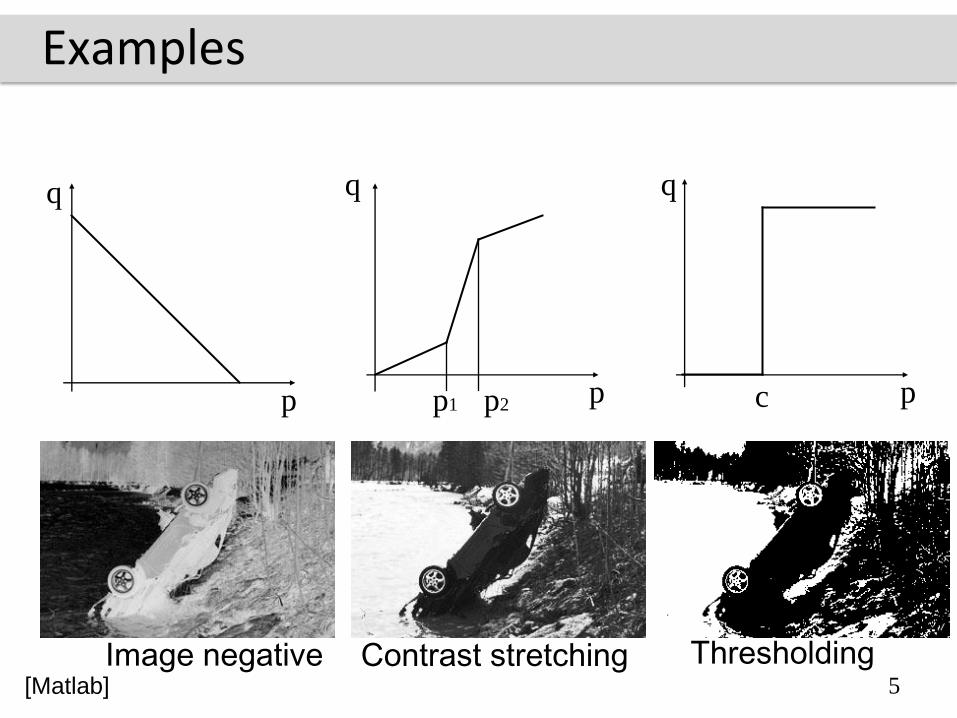
Examples
p
q
p1 p2 c
Image negative Contrast stretching Thresholding
q
p
q
p
5[Matlab]
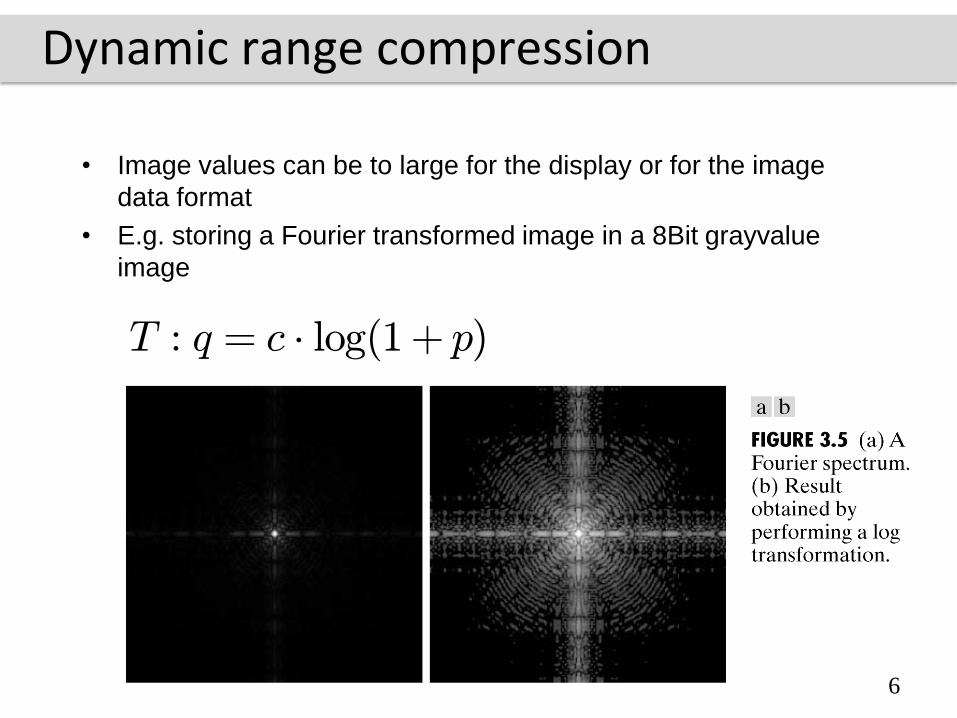
• Image values can be to large for the display or for the image
data format
• E.g. storing a Fourier transformed image in a 8Bit grayvalue
image
T : q = c ¢ log(1+ p)
Dynamic range compression
6
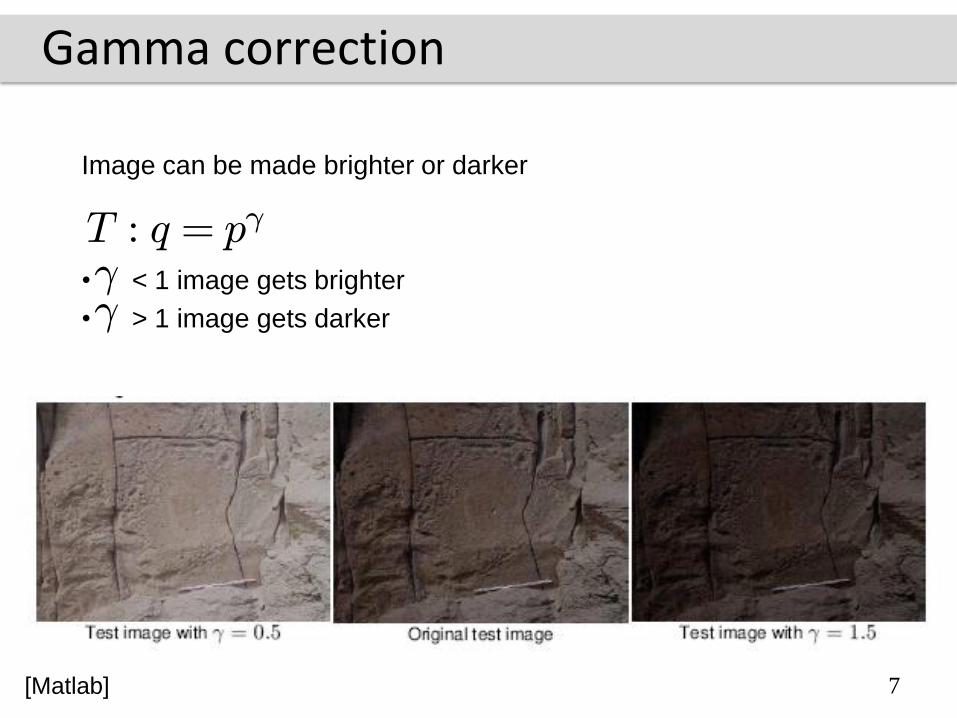
Image can be made brighter or darker
• < 1 image gets brighter
• > 1 image gets darker
Gamma correction
T : q = p°
°°
7[Matlab]

Histogram equalization
• Histogram counts the instances of each grayvalues in the image
• It is the grayvalue distribution of the image
• Can be computed with the Matlab command imhist
8
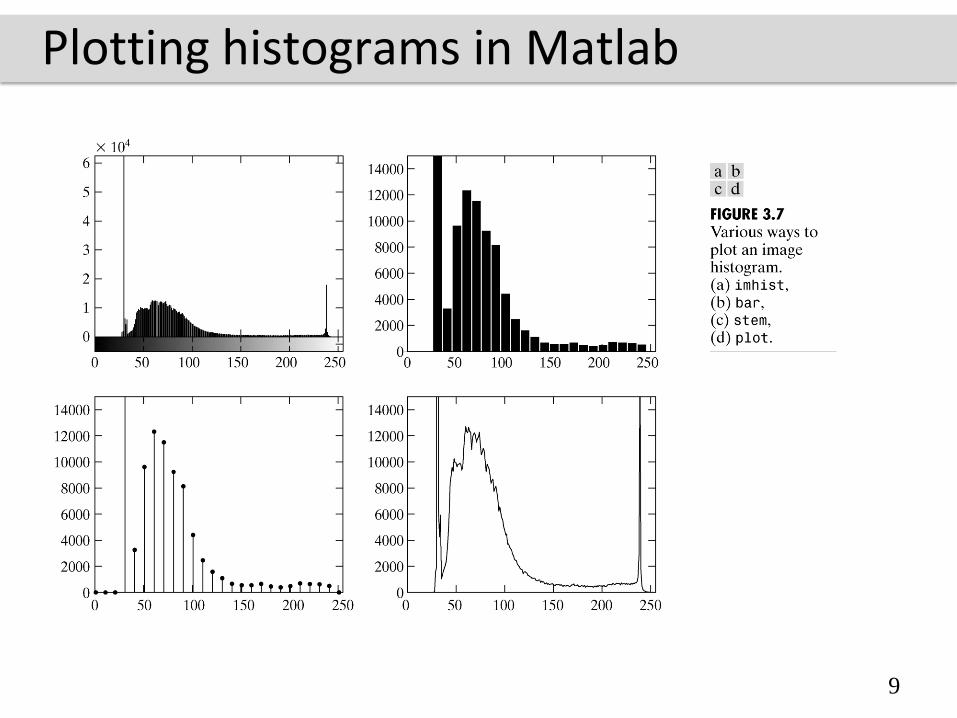
Plotting histograms in Matlab
9
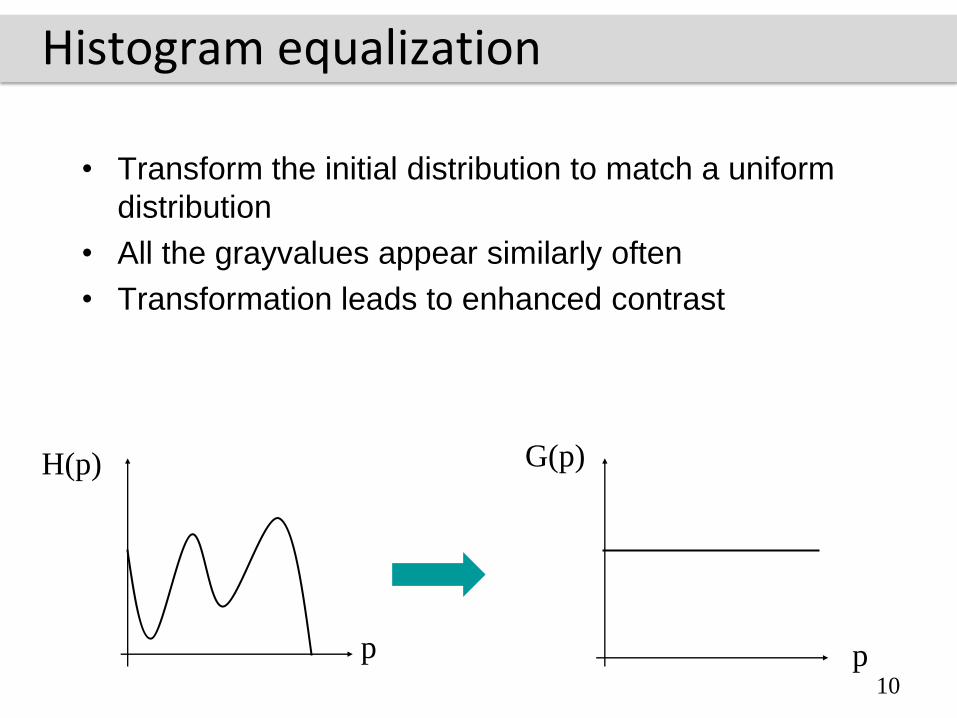
Histogram equalization
• Transform the initial distribution to match a uniform
distribution
• All the grayvalues appear similarly often
• Transformation leads to enhanced contrast
H(p)
p
G(p)
p10
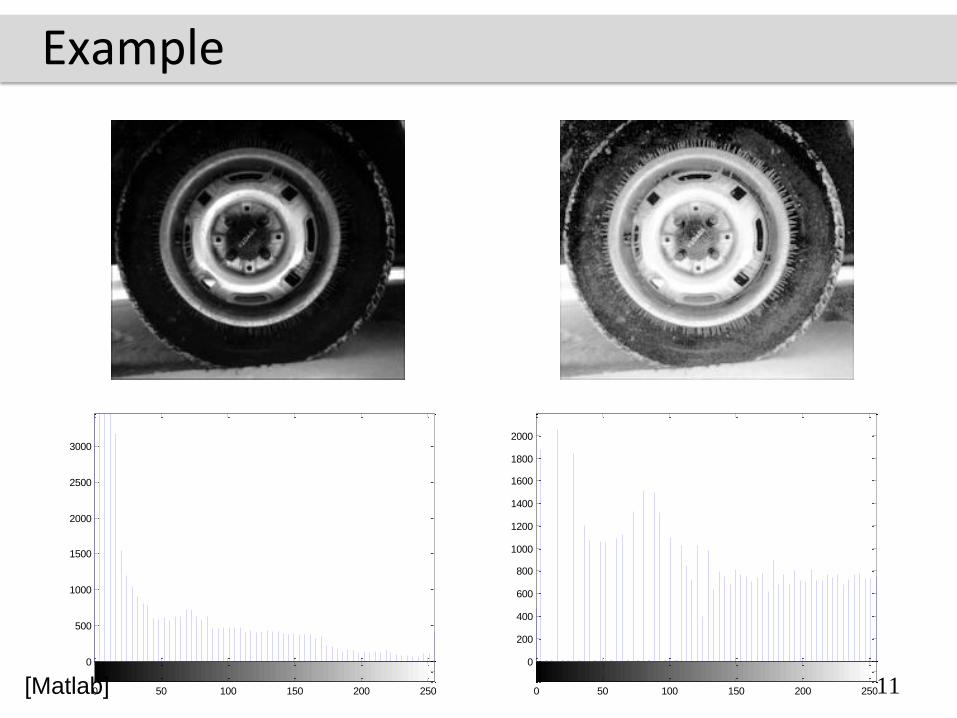
Example
11
0
500
1000
1500
2000
2500
3000
0 50 100 150 200 250
0
200
400
600
800
1000
1200
1400
1600
1800
2000
0 50 100 150 200 250[Matlab]
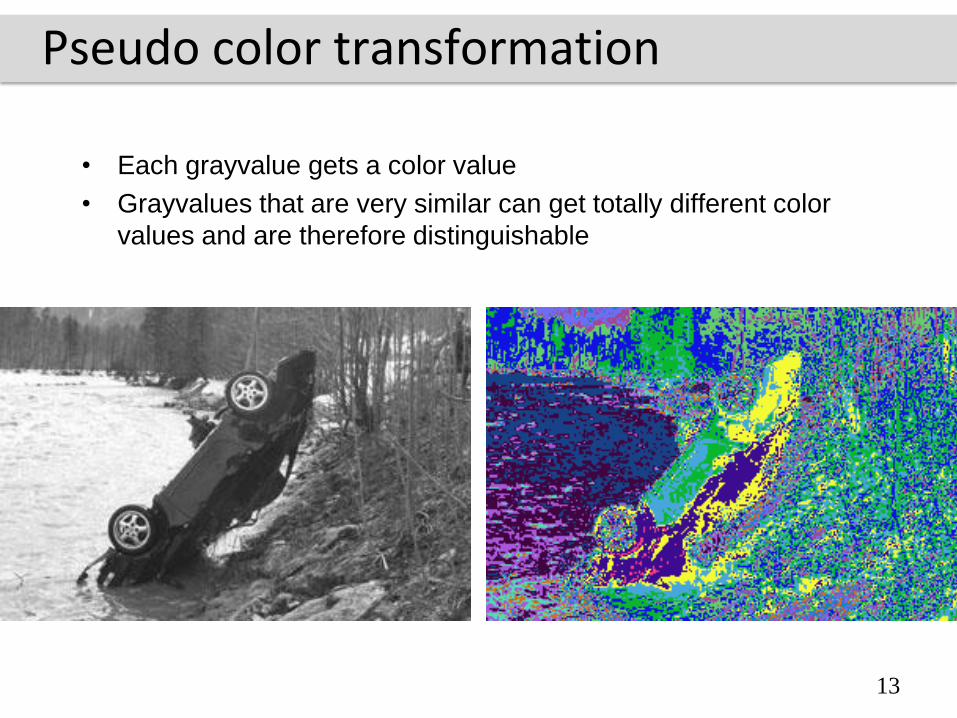
Pseudo color transformation
• Each grayvalue gets a color value
• Grayvalues that are very similar can get totally different color
values and are therefore distinguishable
13
Illumination correction
• When is this necessary?
• Ideally the sensitivity of an image sensor is
independent of the pixel location. This is however not
always true.
• Artificial lighting might lead to non uniform
illumination
• If the deviation is systematic it can be corrected
14
Example: Illumination
15[Matlab]
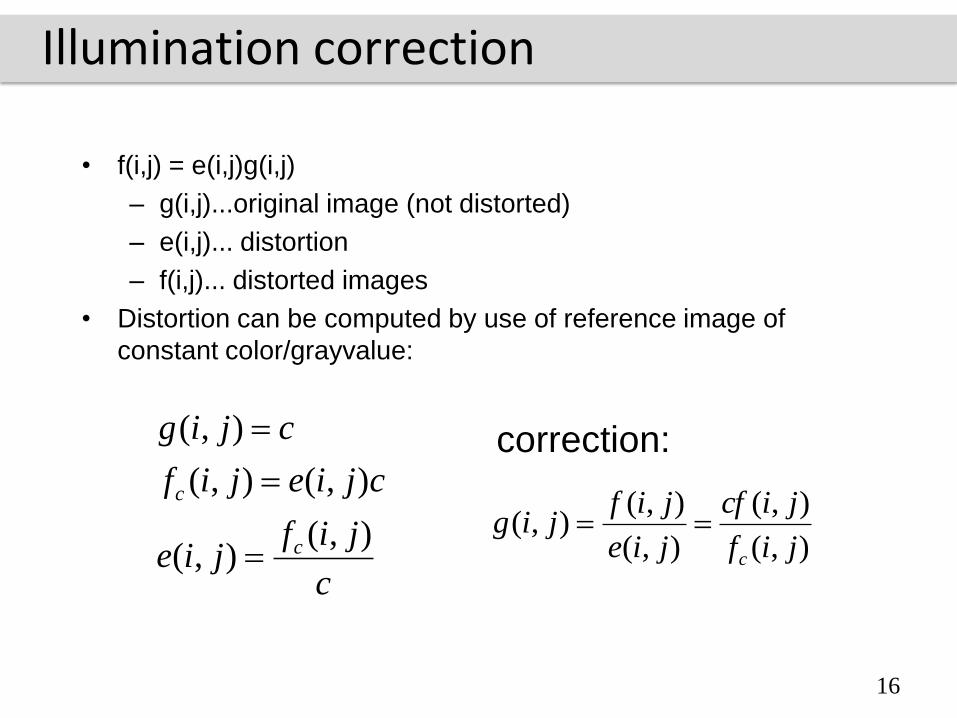
Illumination correction
• f(i,j) = e(i,j)g(i,j)
– g(i,j)...original image (not distorted)
– e(i,j)... distortion
– f(i,j)... distorted images
• Distortion can be computed by use of reference image of
constant color/grayvalue:
c
jifjie
cjiejif
cjig
c
c
),(),(
),(),(
),(
),(
),(
),(
),(),(
jif
jicf
jie
jifjig
c
correction:
16
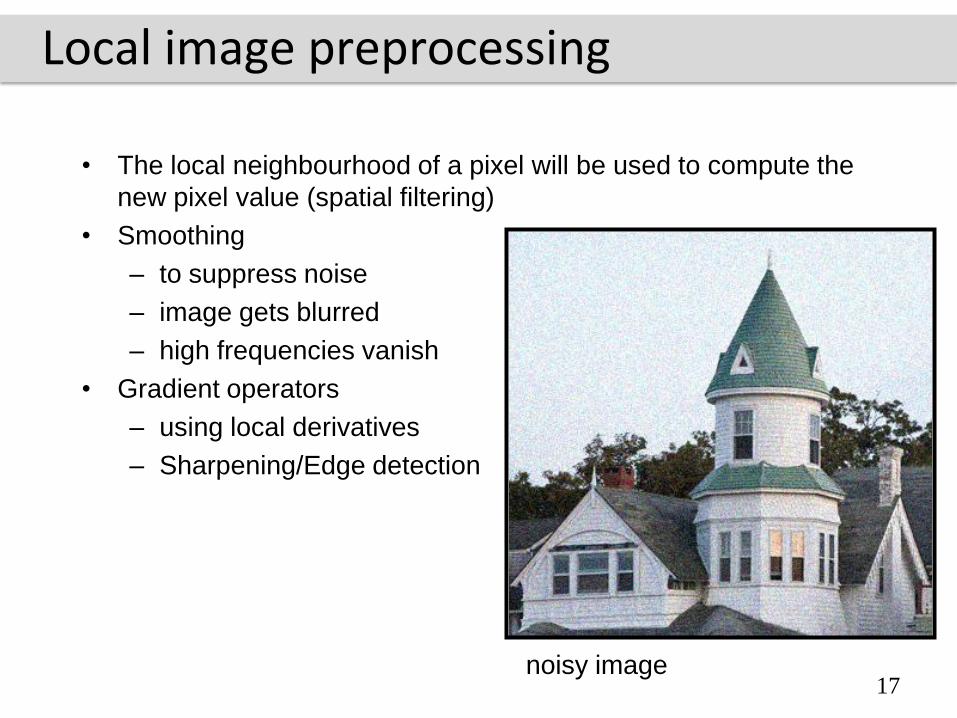
Local image preprocessing
• The local neighbourhood of a pixel will be used to compute the
new pixel value (spatial filtering)
• Smoothing
– to suppress noise
– image gets blurred
– high frequencies vanish
• Gradient operators
– using local derivatives
– Sharpening/Edge detection
17noisy image
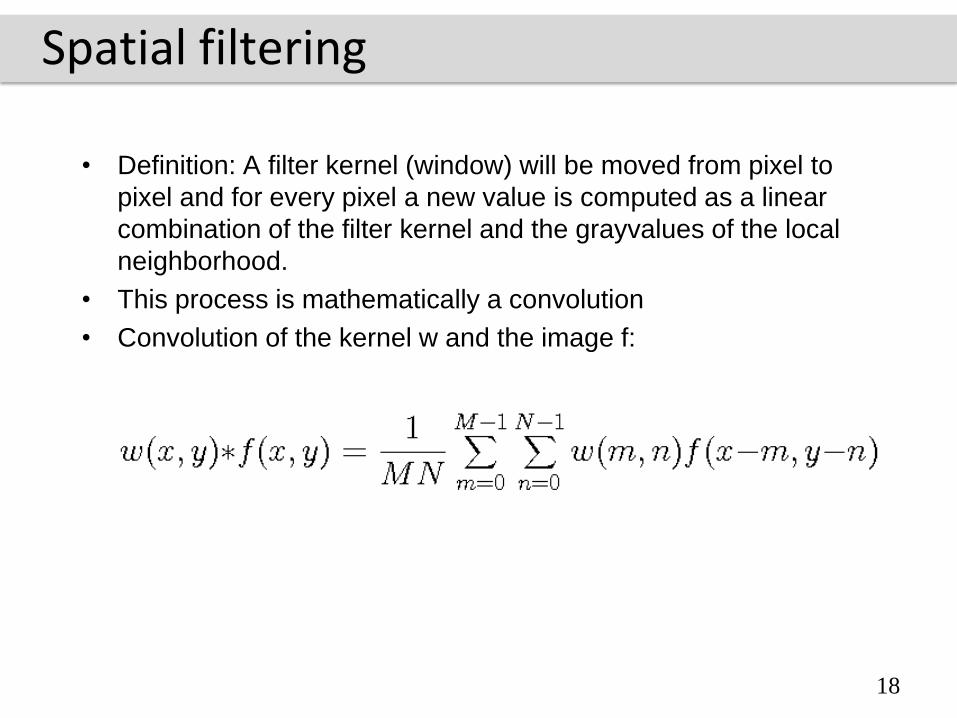
Spatial filtering
• Definition: A filter kernel (window) will be moved from pixel to
pixel and for every pixel a new value is computed as a linear
combination of the filter kernel and the grayvalues of the local
neighborhood.
• This process is mathematically a convolution
• Convolution of the kernel w and the image f:
18
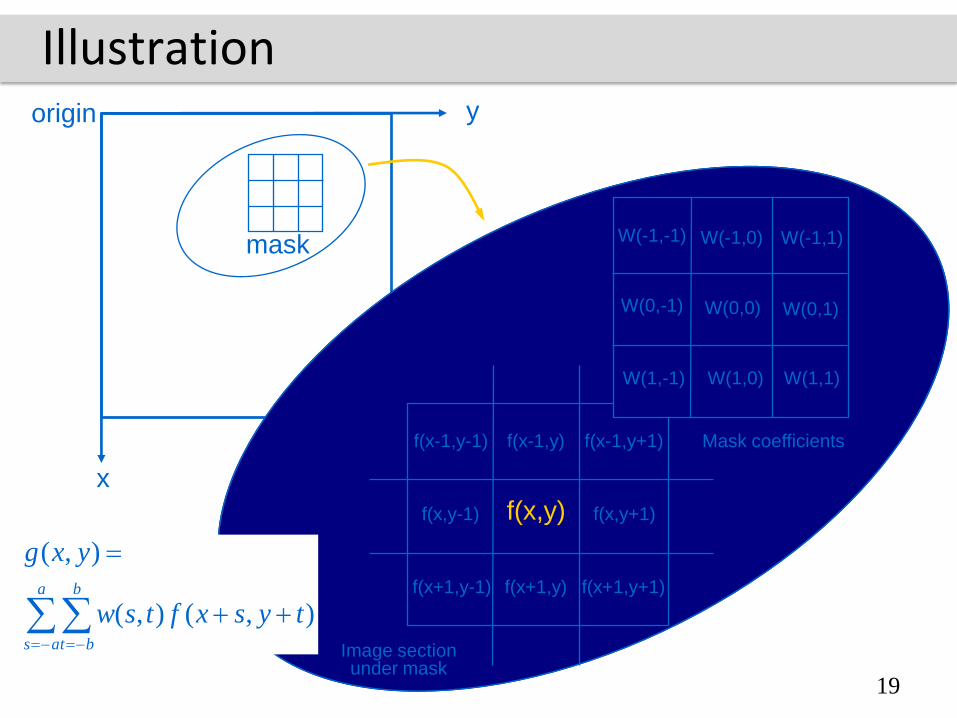
Illustration
W(-1,-1) W(-1,0) W(-1,1)
W(0,-1) W(0,0) W(0,1)
W(1,-1) W(1,0) W(1,1)
f(x-1,y-1) f(x-1,y) f(x-1,y+1)
f(x,y-1) f(x,y) f(x,y+1)
f(x+1,y-1) f(x+1,y) f(x+1,y+1)
x
yorigin
mask
Mask coefficients
Image section under mask
),(),(
),(
tysxftsw
yxg
a
as
b
bt
19
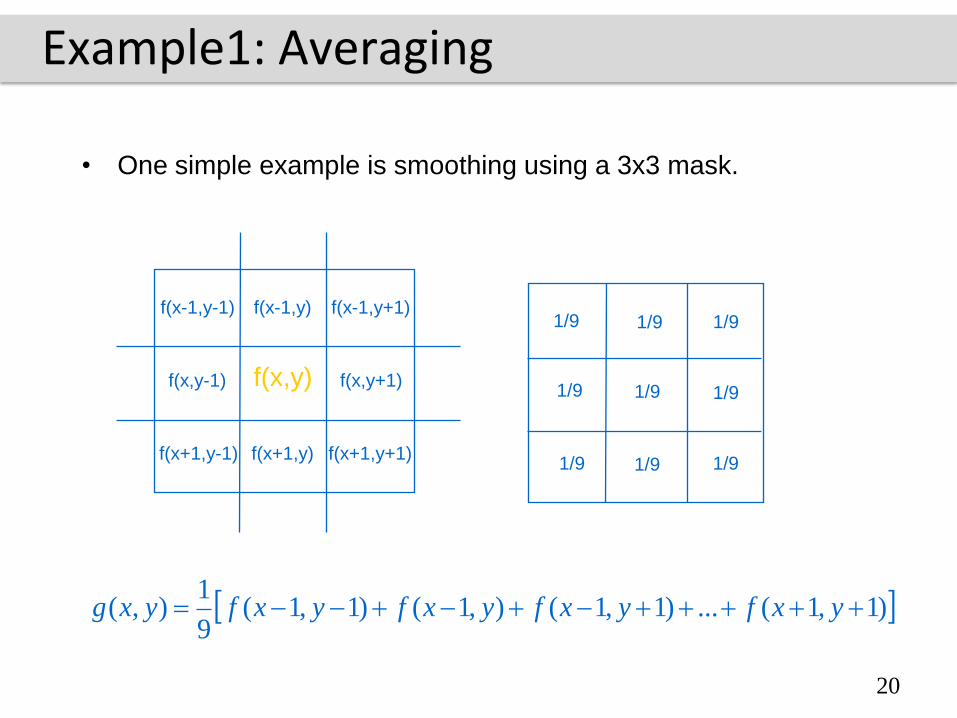
Example1: Averaging
• One simple example is smoothing using a 3x3 mask.
f(x-1,y-1) f(x-1,y) f(x-1,y+1)
f(x,y-1) f(x,y) f(x,y+1)
f(x+1,y-1) f(x+1,y) f(x+1,y+1)
1/9 1/91/9
1/9 1/9 1/9
1/9 1/9 1/9
)1,1(...)1,1(),1()1,1(9
1),( yxfyxfyxfyxfyxg
20
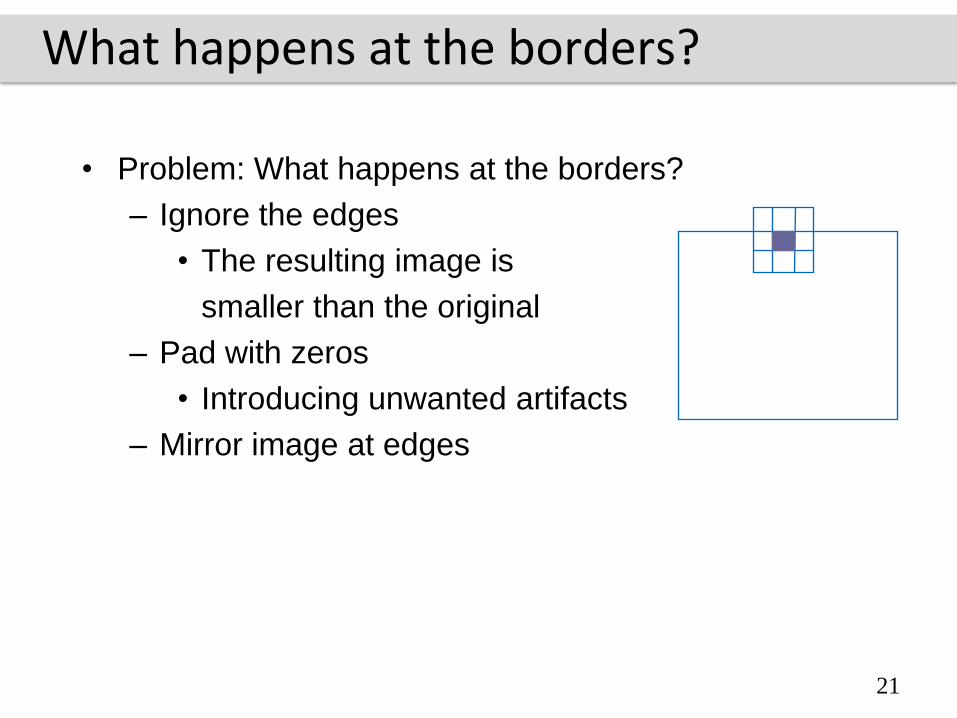
What happens at the borders?
• Problem: What happens at the borders?
– Ignore the edges
• The resulting image is
smaller than the original
– Pad with zeros
• Introducing unwanted artifacts
– Mirror image at edges
21
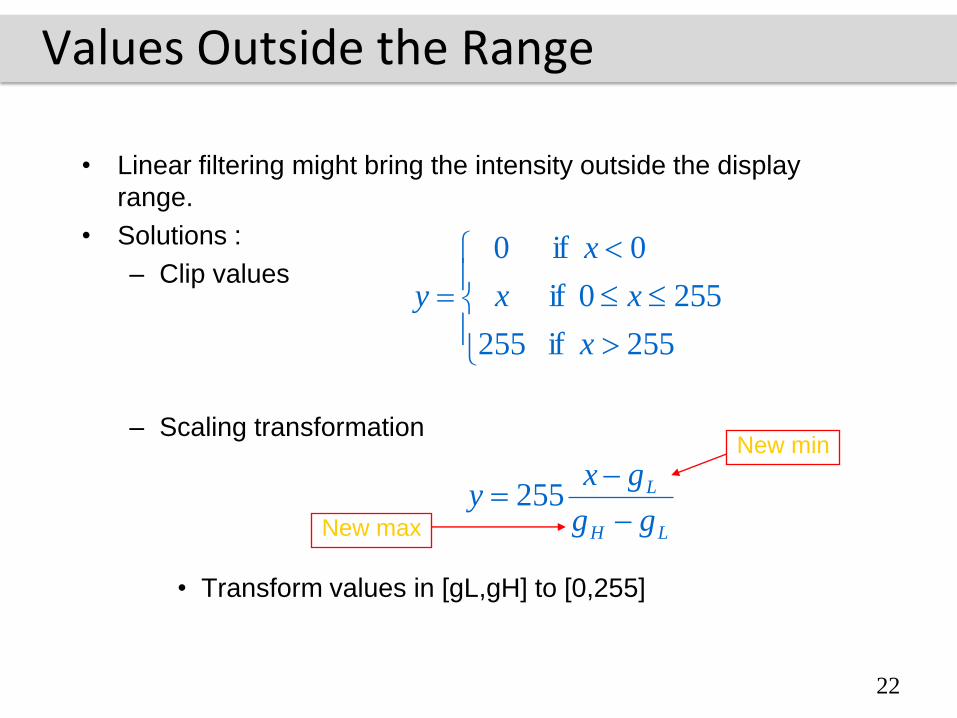
Values Outside the Range
• Linear filtering might bring the intensity outside the display
range.
• Solutions :
– Clip values
– Scaling transformation
• Transform values in [gL,gH] to [0,255]
255 if
2550 if
0 if
255
0
x
x
x
xy
LH
L
gg
gxy
255
New min
New max
22
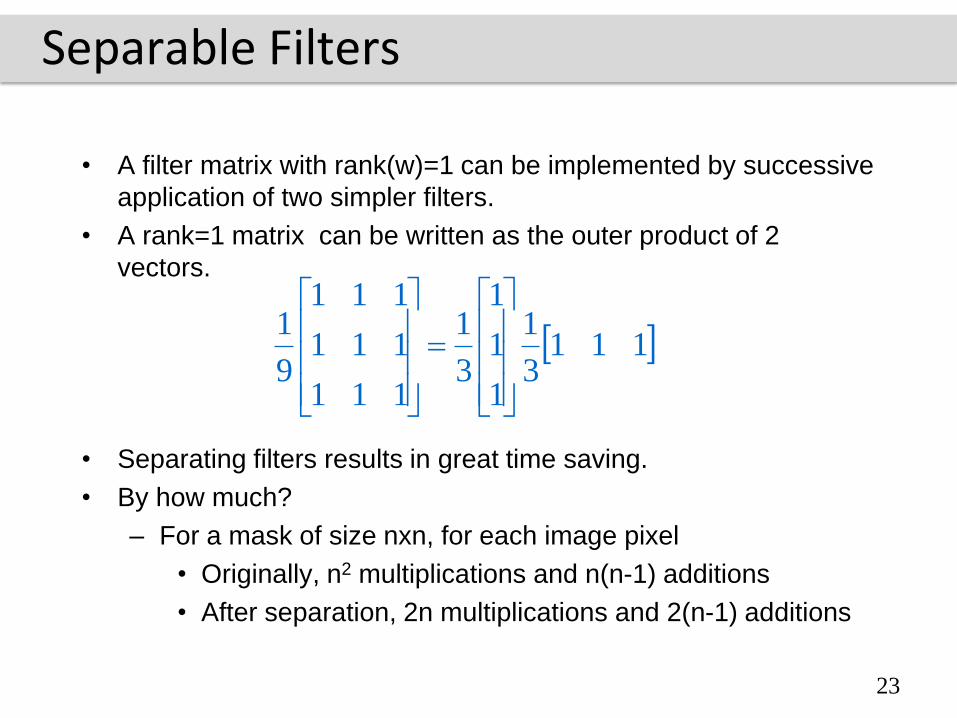
Separable Filters
• A filter matrix with rank(w)=1 can be implemented by successive
application of two simpler filters.
• A rank=1 matrix can be written as the outer product of 2
vectors.
• Separating filters results in great time saving.
• By how much?
– For a mask of size nxn, for each image pixel
• Originally, n2 multiplications and n(n-1) additions
• After separation, 2n multiplications and 2(n-1) additions
1113
1
1
1
1
3
1
111
111
111
9
1
23
Some terminology on Frequency…
• Frequencies: a measure of the amount by which gray values
change with distance.
• High/low-frequency components: large/small changes in gray
values over small distances.
• High/low-pass filter: passing high/low components, and reducing
or eliminating low/high-frequency filter.
24
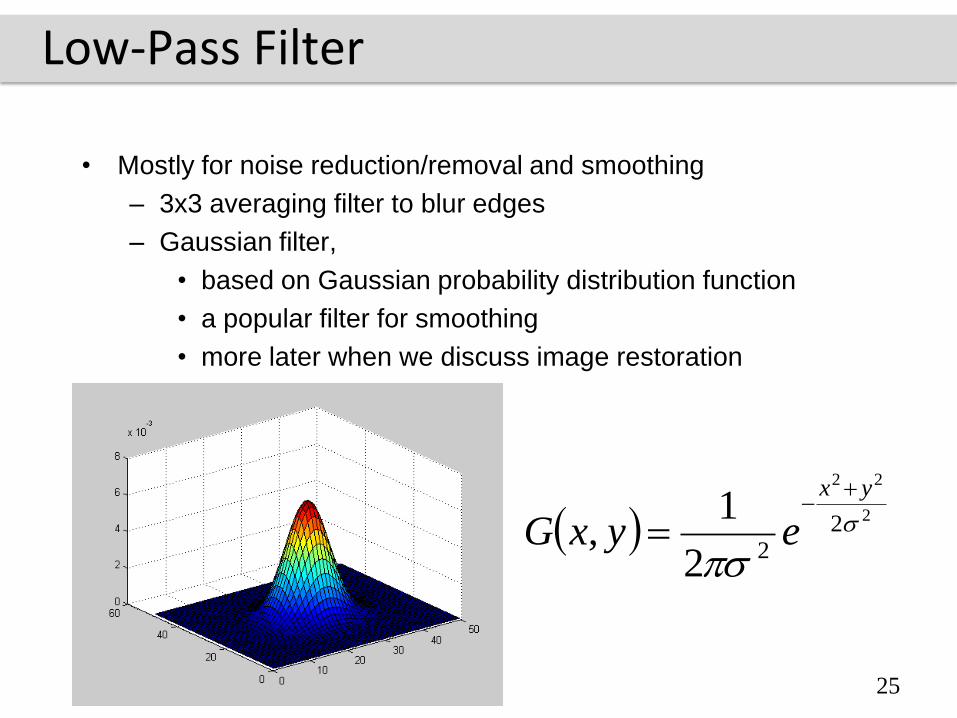
Low-Pass Filter
• Mostly for noise reduction/removal and smoothing
– 3x3 averaging filter to blur edges
– Gaussian filter,
• based on Gaussian probability distribution function
• a popular filter for smoothing
• more later when we discuss image restoration
2
22
222
1,
yx
eyxG
25
Gauss filtering
• A Gaussian filter is a weighted average filter. Pixel in the center
of the filter window are weighted stronger than pixel on the
border (according to the Gaussian distribution).
• The only parameter is (sigma), which is the standard
deviation. This value controls the degree of smoothing.
– as this parameter goes up, more pixels in the neighborhood
are involved in “averaging”,
– the image gets more blurred, and
– noise is more effectively suppressed
26
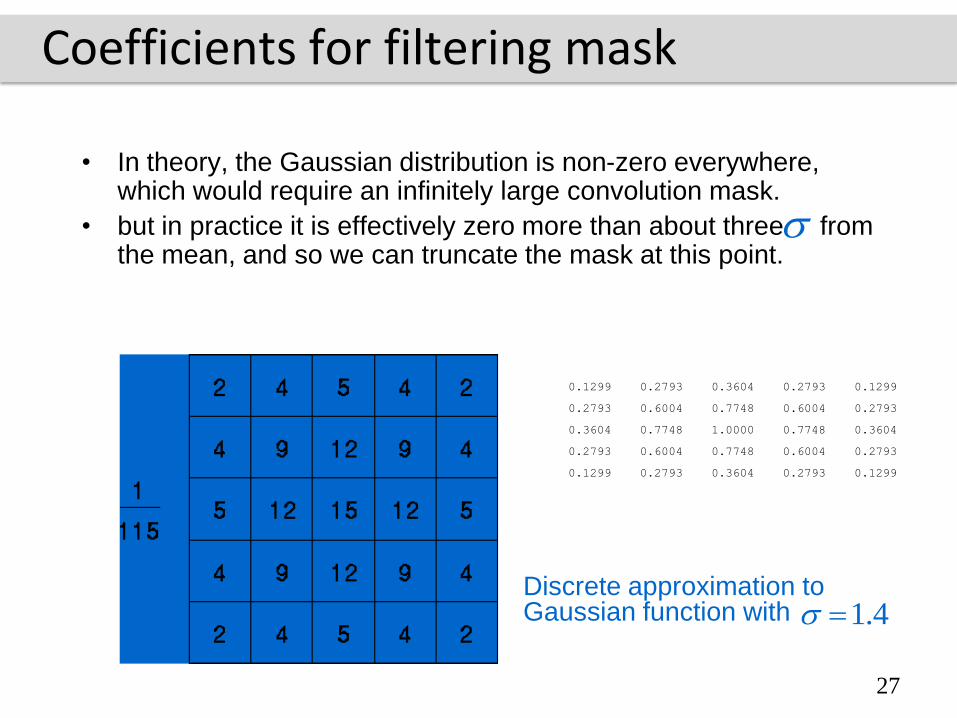
Coefficients for filtering mask
• In theory, the Gaussian distribution is non-zero everywhere, which would require an infinitely large convolution mask.
• but in practice it is effectively zero more than about three from the mean, and so we can truncate the mask at this point.
Discrete approximation to Gaussian function with 4.1
0.1299 0.2793 0.3604 0.2793 0.1299
0.2793 0.6004 0.7748 0.6004 0.2793
0.3604 0.7748 1.0000 0.7748 0.3604
0.2793 0.6004 0.7748 0.6004 0.2793
0.1299 0.2793 0.3604 0.2793 0.1299
1299 0.2793 0.
27
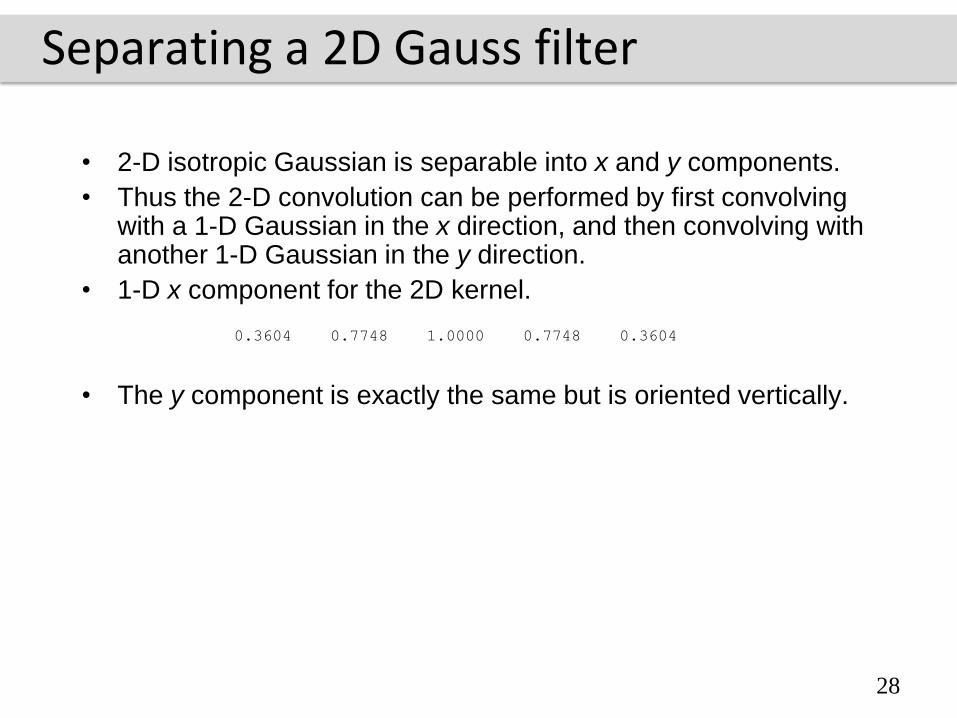
Separating a 2D Gauss filter
• 2-D isotropic Gaussian is separable into x and y components.
• Thus the 2-D convolution can be performed by first convolving with a 1-D Gaussian in the x direction, and then convolving with another 1-D Gaussian in the y direction.
• 1-D x component for the 2D kernel.
• The y component is exactly the same but is oriented vertically.
0.3604 0.7748 1.0000 0.7748 0.3604
1299 0.2793 0.
28
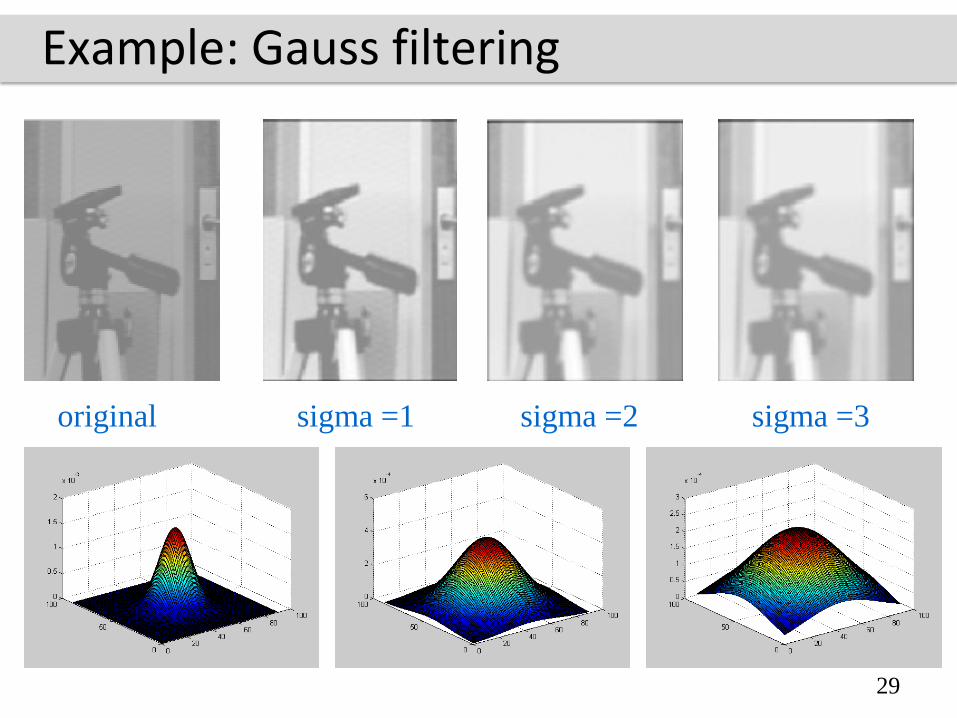
Example: Gauss filtering
sigma =1 sigma =2 sigma =3original
29
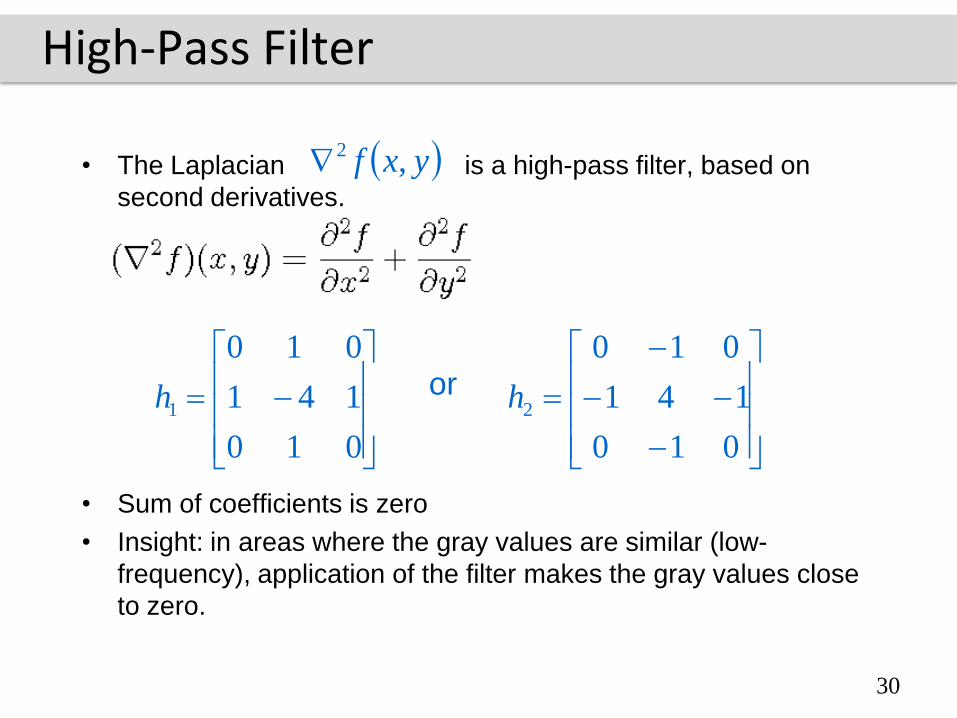
High-Pass Filter
• The Laplacian is a high-pass filter, based on
second derivatives.
• Sum of coefficients is zero
• Insight: in areas where the gray values are similar (low-
frequency), application of the filter makes the gray values close
to zero.
yxf ,2
010
141
010
2h
010
141
010
1h or
30
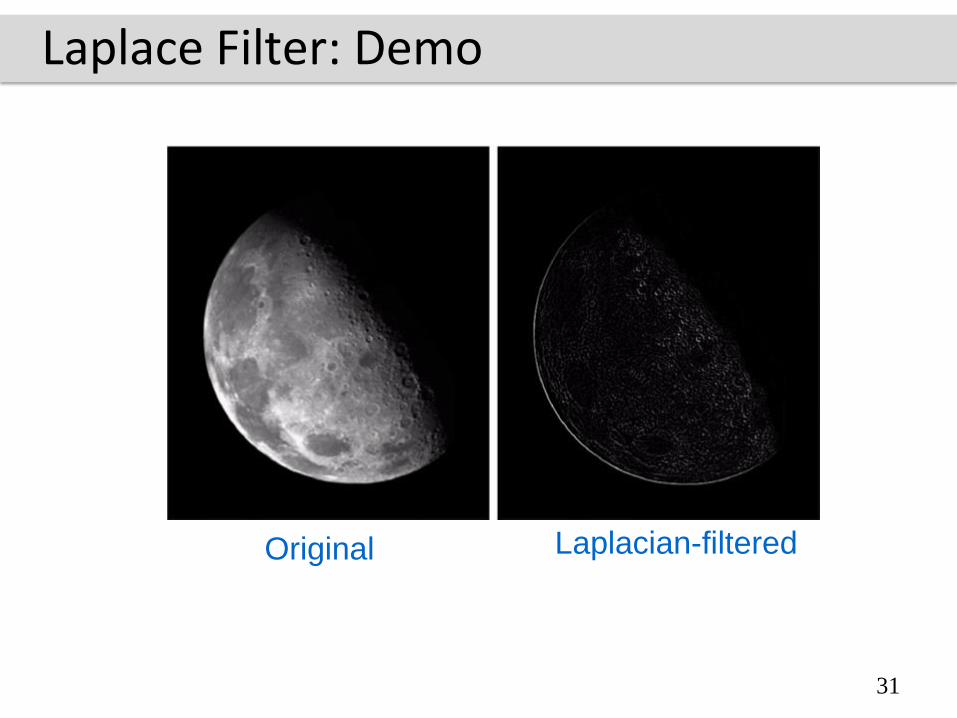
Laplace Filter: Demo
Original Laplacian-filtered
31
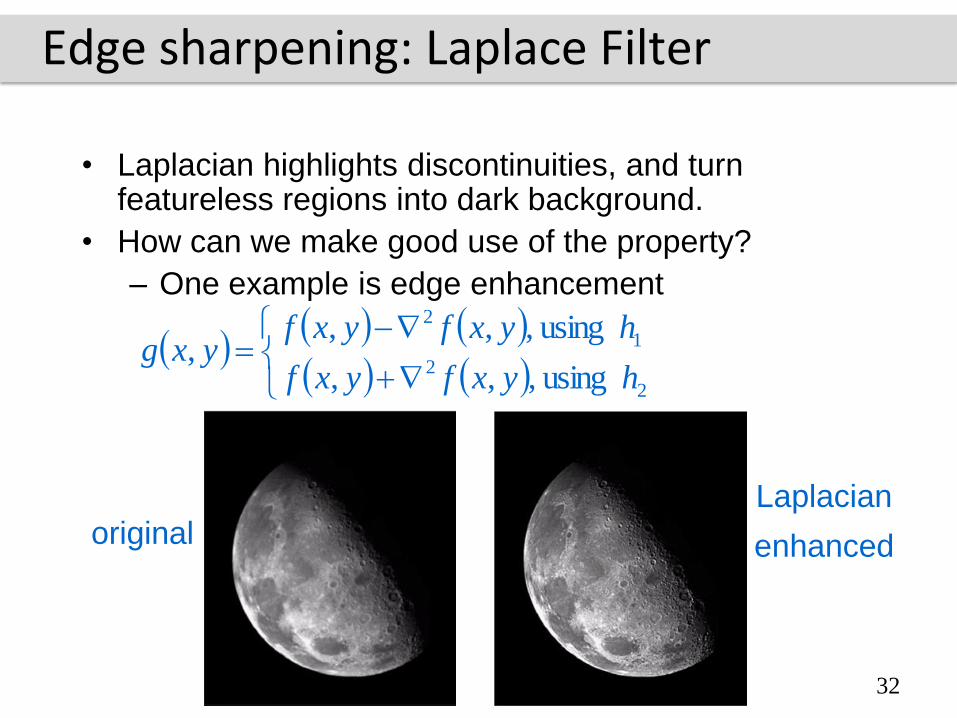
Edge sharpening: Laplace Filter
• Laplacian highlights discontinuities, and turn featureless regions into dark background.
• How can we make good use of the property?
– One example is edge enhancement
2
2
1
2
using ,,,
using ,,,,
hyxfyxf
hyxfyxfyxg
originalLaplacian
enhanced
32

Edge sharpening:Unsharp Masking
• To make edges slightly sharper and crisper.
• This operation is referred to as edge enhancement, edge
crispening or unsharp masking.
• A very popular practice in industry.
• Subtracting a blurred version of an image from the image itself.
, 2 , ,sf x y f x y f x y
Sharpened image
, , , ,sf x y f x y f x y f x y
Blurred imageOriginal image
Edge image
2
1, , ,
2sf x y f x y f x y
33
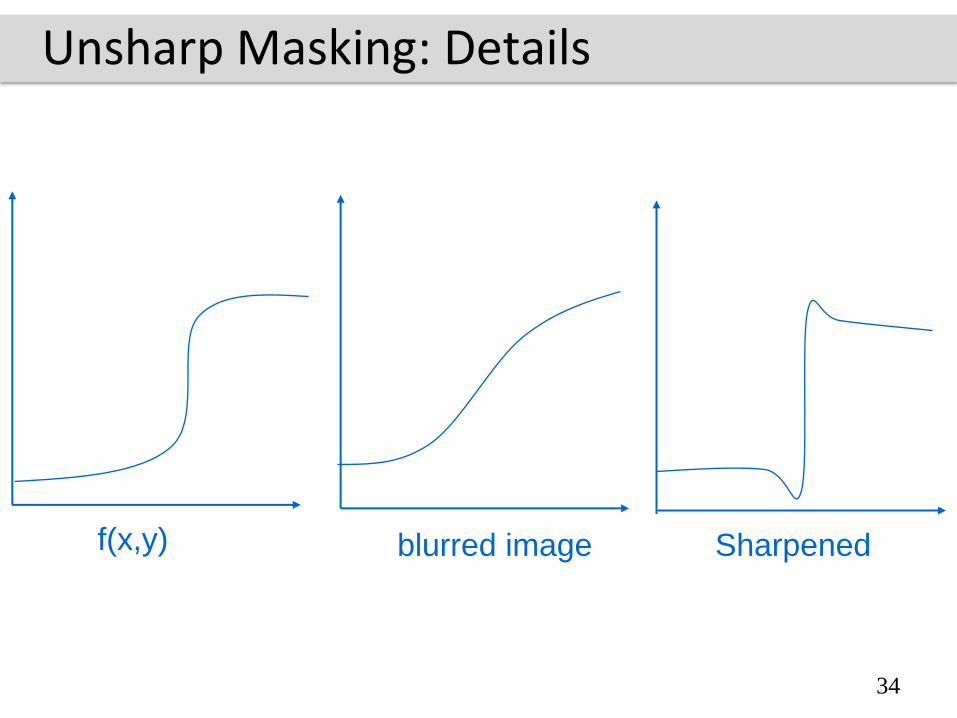
Unsharp Masking: Details
f(x,y) blurred image Sharpened
34
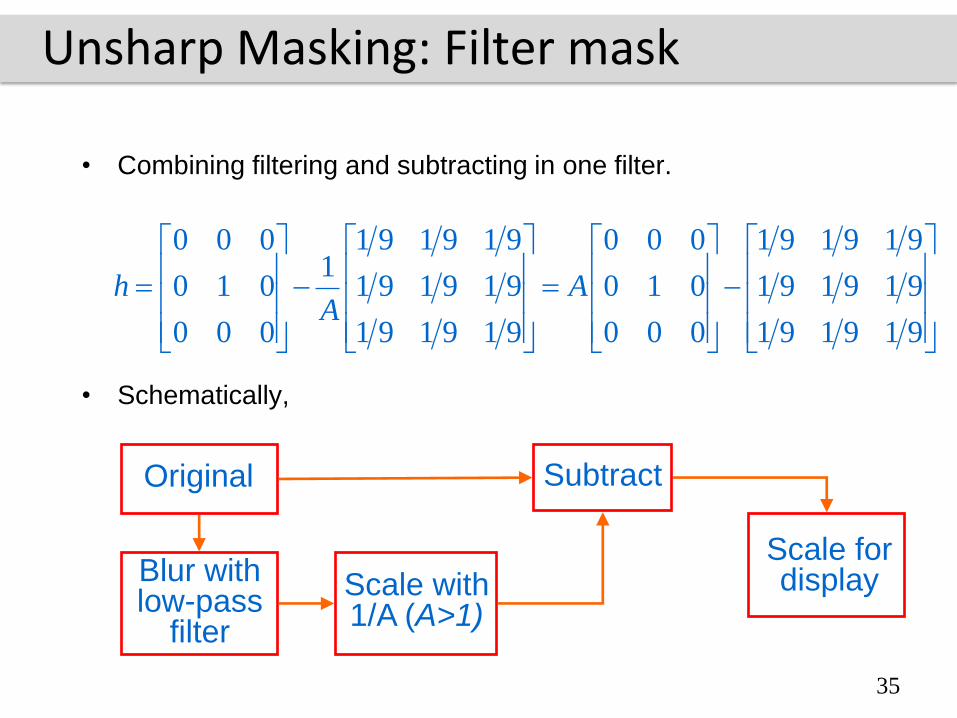
Unsharp Masking: Filter mask
• Combining filtering and subtracting in one filter.
• Schematically,
0 0 0 1 9 1 9 1 9 0 0 0 1 9 1 9 1 91
0 1 0 1 9 1 9 1 9 0 1 0 1 9 1 9 1 9
0 0 0 1 9 1 9 1 9 0 0 0 1 9 1 9 1 9
h AA
Original
Blur with low-pass
filter
Scale with 1/A (A>1)
Subtract
Scale for display
35
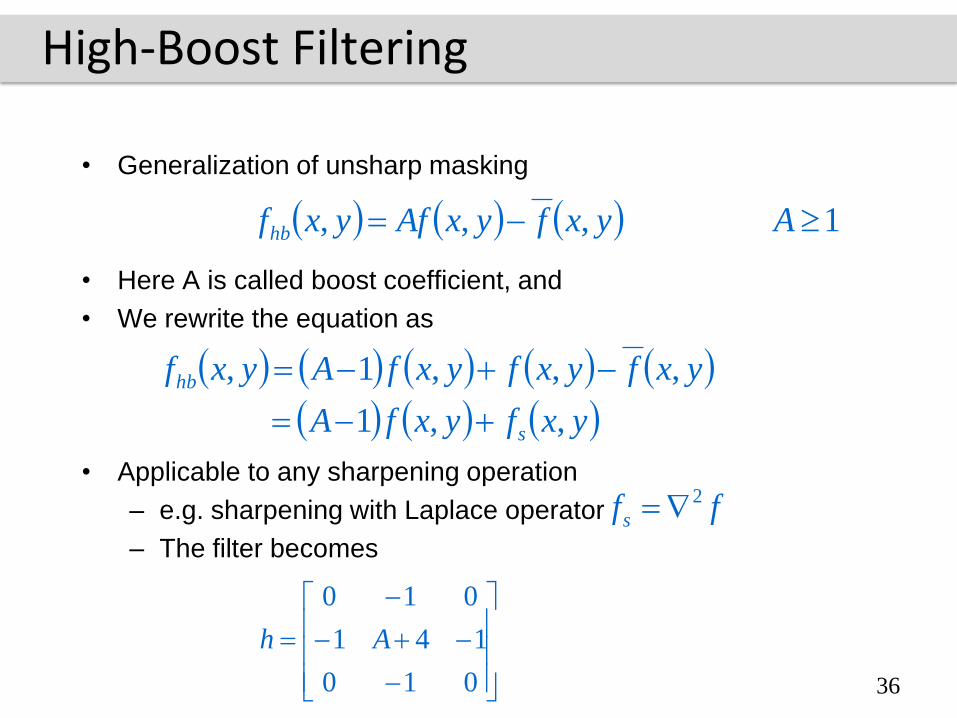
High-Boost Filtering
• Generalization of unsharp masking
• Here A is called boost coefficient, and
• We rewrite the equation as
• Applicable to any sharpening operation
– e.g. sharpening with Laplace operator
– The filter becomes
yxfyxAfyxfhb ,,, 1A
yxfyxfyxfAyxfhb ,,,1,
yxfyxfA s ,,1
2
sf f
010
141
010
Ah
36
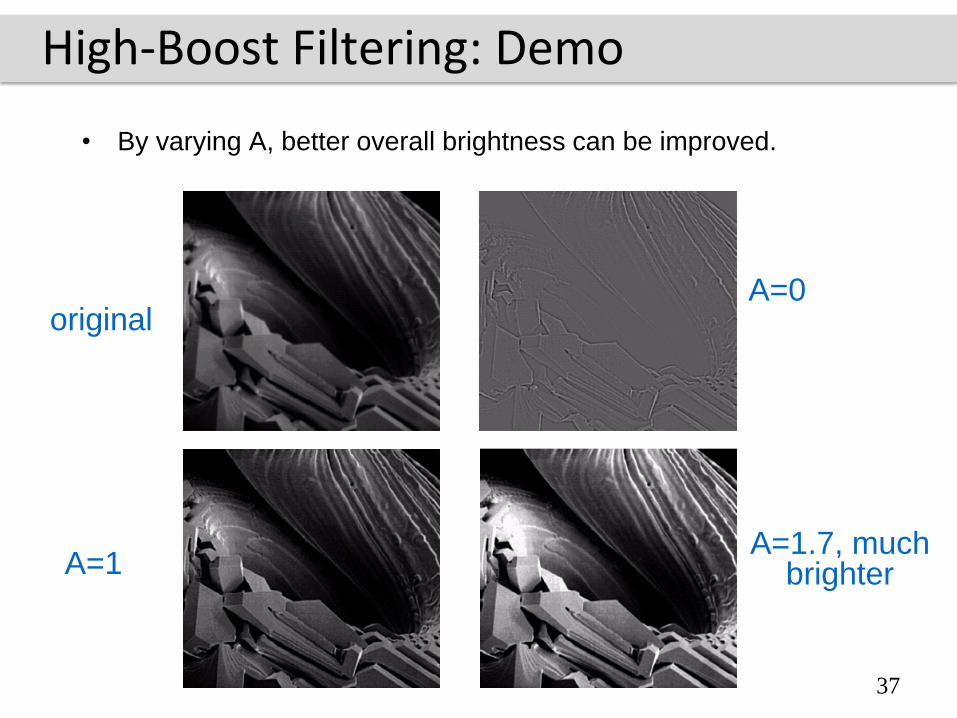
High-Boost Filtering: Demo
• By varying A, better overall brightness can be improved.
originalA=0
A=1A=1.7, much
brighter
37
Image Smoothing
• To suppress noise
• Computing an average of the grayvalues in a local
neighborhood
• Edges get blurred by averaging (high frequencies get
suppressed)
• Filter can be edge-preserving
• Averaging works well when single pixels are wrong
• Large noise regions (blobs) cannot really get removed
38
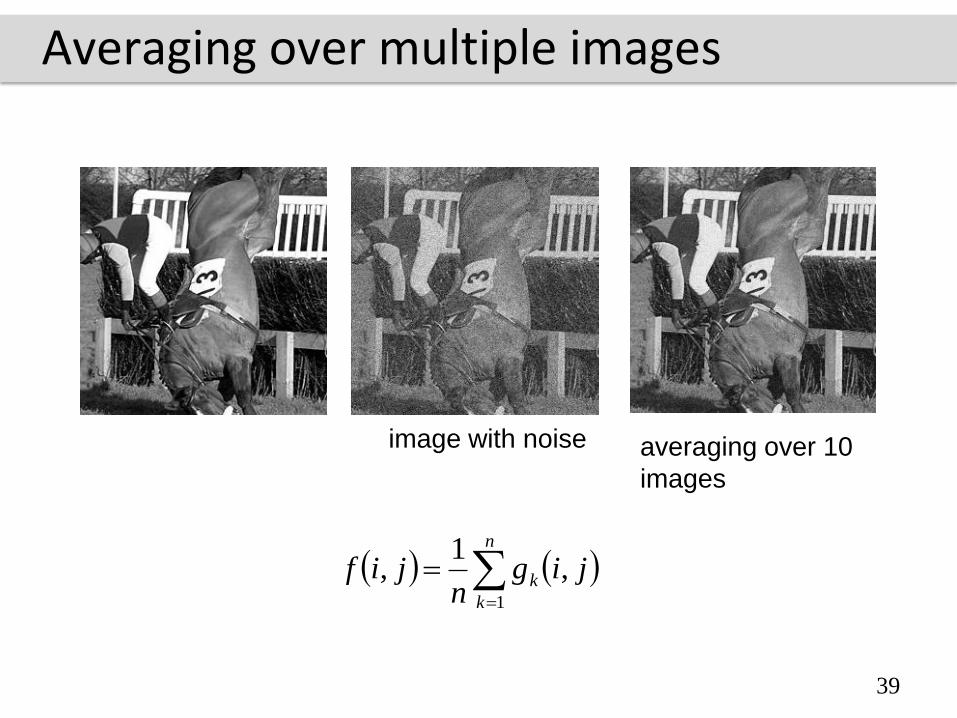
Averaging over multiple images
Original image with noise averaging over 10
images
n
k
k jign
jif1
,1
,
39

Spatial filtering
111
111
111
9
1h
1111111
1111111
1111111
1111111
1111111
1111111
1111111
49
1h
40

Spatial filtering
111
111
111
9
1h
111
121
111
10
1h
121
242
121
16
1h
Approximation of Gauss filtering
41
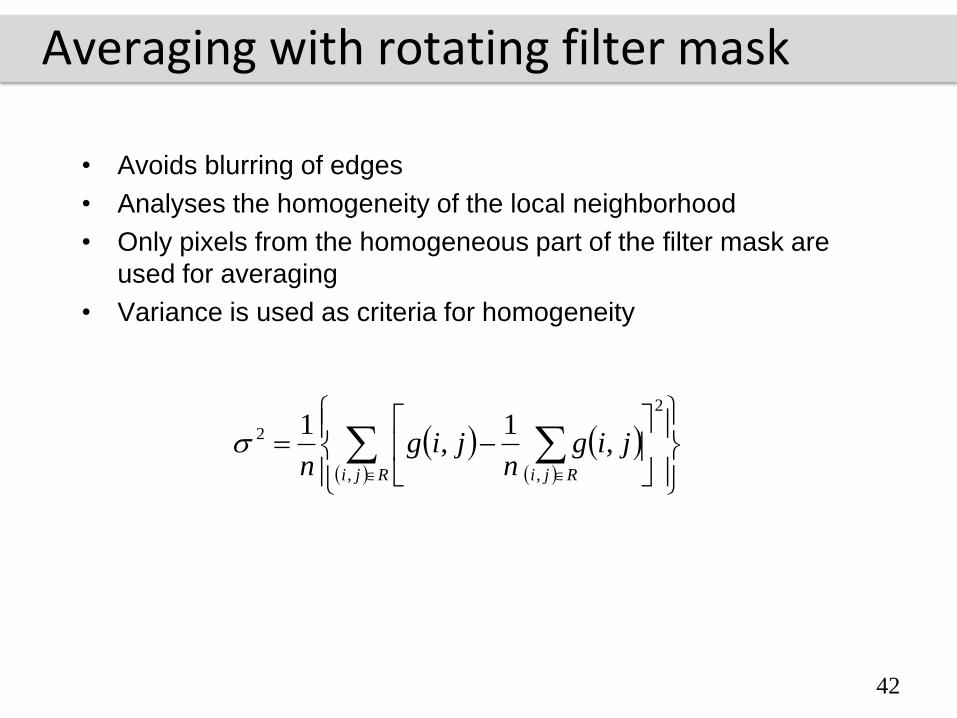
Averaging with rotating filter mask
• Avoids blurring of edges
• Analyses the homogeneity of the local neighborhood
• Only pixels from the homogeneous part of the filter mask are
used for averaging
• Variance is used as criteria for homogeneity
Rji Rji
jign
jign ,
2
,
2 ,1
,1
42
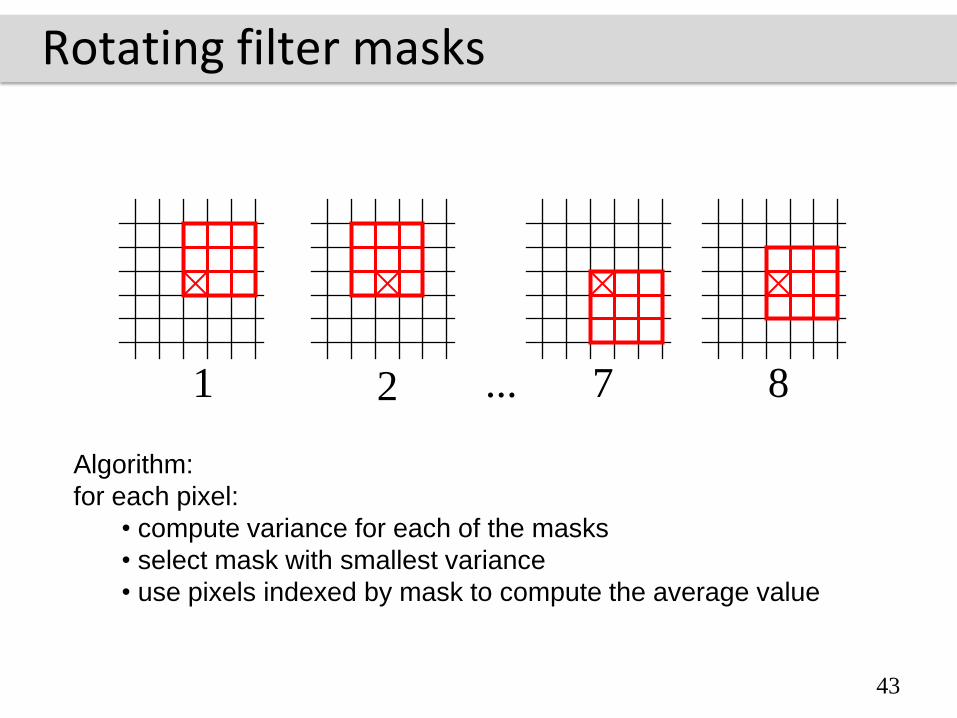
Rotating filter masks
1 2 7 8...
Algorithm:
for each pixel:
• compute variance for each of the masks
• select mask with smallest variance
• use pixels indexed by mask to compute the average value
43
Nonlinear Filters
• Maximum filter: the output the maximum value under
the mask
• Minimum filter: the output the minimum value under
the mask
• Rank-order filter:
– Elements under the mask are ordered, and a
particular value is returned.
– Both maximum and minimum filter are instances
of rank-order
– Another popular instance is median filter
44
More Nonlinear Filters
• Alpha-trimmed mean filter:
– Order the values under the mask
– Trim off elements at either end of the ordered list
– Take the mean of the remainder
– E.g. assuming a 3x3 mask and the ordered list
– Trimming of two elements at either end, the result of the filter is
9321 ... xxxx
576543 xxxxx
45