document9
DESCRIPTION
Dispense di monitoraggio geomatico.TRANSCRIPT

Progettazione di un rilievoProgettazione di un rilievoSe le dimensioni dellSe le dimensioni dell’’oggetto/area sono tal da essere oggetto/area sono tal da essere comprese nel campo di acquisizione dello strumento, comprese nel campo di acquisizione dello strumento, èèsufficiente unsufficiente un’’unica scansioneunica scansione
Il modello acquisito Il modello acquisito èè inquadrato nel sistema di riferimento inquadrato nel sistema di riferimento strumentalestrumentale
Se Se èè necessario necessario georeferenziaregeoreferenziare il modello in un il modello in un SdRSdResterno, occorre includere alcuni punti di controllo (GCP), di esterno, occorre includere alcuni punti di controllo (GCP), di coordinate notecoordinate note

Georeferenziazione di un singolo modelloGeoreferenziazione di un singolo modelloVuol dire determinareVuol dire determinare–– 3 traslazioni3 traslazioni–– 3 angoli di rotazione nello spazio 3 angoli di rotazione nello spazio
(matrice di rotazione 3x3)(matrice di rotazione 3x3)Il calcolo viene eseguito utilizzando Il calcolo viene eseguito utilizzando almeno 3 GCP:almeno 3 GCP:
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ΚΦΩ+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
zyx
),,(TTT
ZYX
Z
Y
XR
x
z y
X
ZY

Rilievi di oggetti di grandi dimensioniRilievi di oggetti di grandi dimensioni
Se lSe l’’oggetto oggetto èè di dimensioni tali da non poter essere di dimensioni tali da non poter essere pipiùù ripreso in una singola scansione, ripreso in una singola scansione, èè necessario necessario eseguire una seria di acquisizioni (eseguire una seria di acquisizioni (blocco di blocco di scansioniscansioni))PoichPoichéé ciascuna scansione ciascuna scansione èè riferita nel riferita nel SdRSdRstrumentale, esse devono essere registrate nello strumentale, esse devono essere registrate nello stesso stesso SdRSdRDue casi:Due casi:–– Non Non èè necessario inquadrare il rilievo in un necessario inquadrare il rilievo in un SdRSdR
esterno, ma esterno, ma èè sufficiente sufficiente coco--registrareregistrare i modellii modelli–– EE’’ necessario inquadrare il rilievo in un necessario inquadrare il rilievo in un SdRSdR esterno esterno
(serve un numero sufficiente di GCP)(serve un numero sufficiente di GCP)

CoCo--registrazioneregistrazione di modellidi modelliVuol dire considerare il Vuol dire considerare il SdRSdR proprio di un modello proprio di un modello come riferimento come riferimento èè registrare gli altri su di esso registrare gli altri su di esso (chiamata anche (chiamata anche allineamentoallineamento))Si tratta di calcolare i parametri della Si tratta di calcolare i parametri della trasformazione:trasformazione:
Due modalitDue modalitàà per trovare i punti omologhi:per trovare i punti omologhi:–– Metodi di Metodi di matchingmatching di superfici (ad esempio ICP)di superfici (ad esempio ICP)–– Utilizzo di punti di controllo (almeno 3) misurati su Utilizzo di punti di controllo (almeno 3) misurati su
entrambi i modelli da entrambi i modelli da coco--registrareregistrare
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ΚΦΩ+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
2
2
2
121212
Z
Y
X
1
1
1
ZYX
),,(TTT
ZYX
12
12
12
R

Georeferenziazione di piGeoreferenziazione di piùù modelli (1)modelli (1)
EE’’ ovviamente possibile, disponendo di un ovviamente possibile, disponendo di un numero di GCP sufficiente, registrare ogni numero di GCP sufficiente, registrare ogni singolo modello nel singolo modello nel SdRSdR esternoesterno
GCP

Georeferenziazione di piGeoreferenziazione di piùù modelli (2)modelli (2)Se si dispone di un numero limitato di GCP, Se si dispone di un numero limitato di GCP, èè possibile in possibile in sequenza:sequenza:
–– CoCo--registrareregistrare tra loro i singoli modellitra loro i singoli modelli•• Utilizzando punti di controlloUtilizzando punti di controllo•• Adottando metodi di Adottando metodi di matchingmatching tra superficitra superfici
–– GeoreferenziareGeoreferenziare il blocco utilizzando i GCP disponibiliil blocco utilizzando i GCP disponibili
GCPTiepoint

Esempio di GCPEsempio di GCP
Solitamente i GCP vengono materializzati da Solitamente i GCP vengono materializzati da target target (o (o markermarker), costituiti da materiale riflettente che ), costituiti da materiale riflettente che risalta nelle scansionirisalta nelle scansioniLe coordinate dei target nel Le coordinate dei target nel SdRSdR esterno vengono esterno vengono determinate mediante metodi topografici:determinate mediante metodi topografici:–– In In closeclose--rangerange: stazione totale (angoli e distanze): stazione totale (angoli e distanze)–– AllAll’’esterno anche con GPSesterno anche con GPS

Rilievo di un impianto industrialeRilievo di un impianto industriale
Scanner laser impiegato:Scanner laser impiegato:–– RieglRiegl LMSLMS--Z210Z210
Tempo impiegato:Tempo impiegato:–– 33’’ 2727’’’’
N. punti acquisiti:N. punti acquisiti:–– 197136197136
N. scansioni eseguite:N. scansioni eseguite:–– 11
matrici delle distanze - intensità
Modello 3D colorato con la matrice delle distanze

Rilievo di un ponteRilievo di un ponte
Scanner laser impiegato:Scanner laser impiegato:–– RieglRiegl LMSLMS--Z210Z210
N. scansioni eseguite:N. scansioni eseguite:–– 88
matrici delle distanze – true color
Creazione di prospetti e sezioni

Rilievo di un castello (1)Rilievo di un castello (1)
Scanner Scanner laser laser impiegato:impiegato:–– RieglRiegl
LMSLMS--Z210Z210
N. scansioni N. scansioni eseguite:eseguite:–– 22
matrici delle distanze
matrici true-color
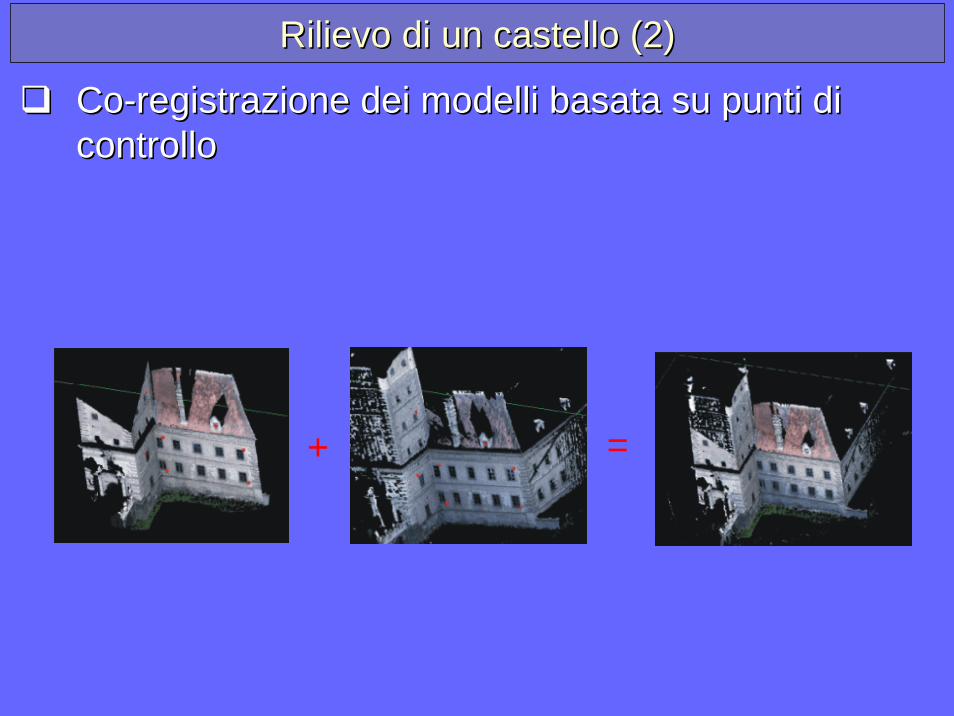
Rilievo di un castello (2)Rilievo di un castello (2)
CoCo--registrazioneregistrazione dei modelli basata su punti di dei modelli basata su punti di controllocontrollo
+ =

Rilievo di un castello (3)Rilievo di un castello (3)
Creazione di modelli Creazione di modelli fotofoto--realistici (realistici (VirtualVirtualReality) dalla Reality) dalla proiezione delle proiezione delle immagini immagini truetrue--colorcolorsul modello 3D sul modello 3D complessivocomplessivoRestituzione di un Restituzione di un disegno CAD disegno CAD (prospetto)(prospetto)

Strumentazione impiegataStrumentazione impiegataStrumento impiegato:Strumento impiegato:
–– Scanner Scanner RieglRiegl LPM 2kLPM 2kGCP: GCP:
–– 44--5, materializzati mediante dischi in 5, materializzati mediante dischi in materiale riflettentemateriale riflettente
–– Misura della posizione dei GCP Misura della posizione dei GCP mediante GPSmediante GPS
Ghiacciaio del Ghiacciaio del LobucheLobucheScansioni eseguite: 9Scansioni eseguite: 9#GCP#GCP: 5: 5
Le scansioni sono state registrate tra loro in modo da Le scansioni sono state registrate tra loro in modo da definire il modello solidodefinire il modello solidoContemporaneamente ai dati laser scanning sono Contemporaneamente ai dati laser scanning sono state acquisite immagini digitali della superficie state acquisite immagini digitali della superficie ripresa per realizzare ripresa per realizzare ortofotoortofoto

CREAZIONE DEL MODELLO 3DCREAZIONE DEL MODELLO 3D
Ghiacciaio del Ghiacciaio del LobucheLobuche
Scansioni eseguite: 9Scansioni eseguite: 9#GCP#GCP: 5: 5
Le scansioni sono Le scansioni sono state registrate tra loro state registrate tra loro in modo da definire il in modo da definire il modello solidomodello solido
Contemporaneamente Contemporaneamente ai dati laser scanning ai dati laser scanning sono state acquisite sono state acquisite immagini digitali della immagini digitali della superficie ripresa per superficie ripresa per realizzare realizzare ortofotoortofoto