a generalized numerical framework of imprecise probability...
TRANSCRIPT

A generalized numerical framework of impreciseprobability to propagate epistemic uncertainty
Marco de Angelis,E. Patelli, M. Beer
E: [email protected]: www.liv.ac.uk/risk-and-uncertaintyT: +44 01517945481
M. de Angelis, et al. 26th May 2014 1 / 30
Outline
1 Introduction
2 Uncertainty propagationImprecise failure probabilityLine sampling estimation
3 ExamplesExplicit functionLarge scale finite element model
4 Conclusions
M. de Angelis, et al. 26th May 2014 2 / 30

Introduction
Problem statement
Computer modelReliability assessmentDecision making
M. de Angelis, et al. 26th May 2014 3 / 30
Introduction
Sources of uncertainty
1 Model inputs (such as distributional models, hyper-parameters etc.)
2 Numerical approximation (discretization, truncation and round-off errors)
3 Model form (mathematical & physical model representing the system )
M. de Angelis, et al. 26th May 2014 4 / 30

Introduction
Uncertainty framework
VerificationNumerical approximation
Discretization errorsRound-off errors
Uncertainty propagationpropagation of input uncertainties through the modelprocessing of output uncertainties
Validationcheck the model against experimental data
Decisionidentify the worst case scenariodecide whether worst case is acceptable
M. de Angelis, et al. 26th May 2014 5 / 30
Introduction
Aspects of propagation
Number of individual evaluations of the model needed depends on:Nonlinearity of the modelDependency structure between the input quantitiesType of uncertainty, aleatory, epistemic, or mixedThe numerical method used to perform the mapping
M. de Angelis, et al. 26th May 2014 6 / 30

Introduction
Parametric approachStandard approach
1
2
j
n
p1
p3
pj
pm-1
pm
p2
p4
f1(.) f2(.) f3(.) RQ
Monte Carlo Simulation
RQ
Simulated CDFGlobal Optimization
i
a1i
a2i
aji
a2i
Search feasible domain B
i
θ
θ
θ
θ
pF = 1N
i=1
N
I (RQ<0)i
EPR=1N
i=1
N
RQi
M. de Angelis, et al. 26th May 2014 7 / 30
Introduction
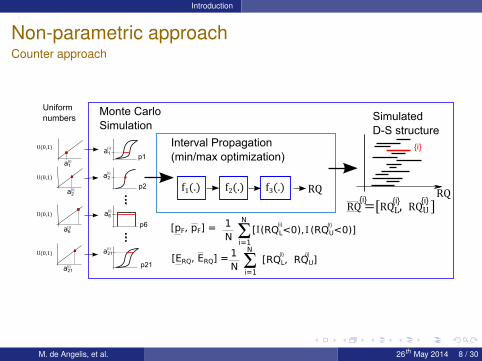
Non-parametric approachCounter approach
p1
p2
p6
p21
U(0,1)
a1i
a1i
U(0,1)
a6i
a6i
U(0,1)
a2i
U(0,1)
a21i
a2i
a21i
Interval Propagation(min/max optimization)
RQ
i
RQ=[RQL,RQU]i i i
SimulatedD-S structure
f1(.) f2(.) f3(.) RQ
Monte Carlo Simulation
Uniform numbers
1N
i=1
N
I(RQL<0), (RQU<0)]i[pF, pF] = [ I
i
1N
i=1
N
RQL, RQU]i[ERQ, ERQ] = [
i
M. de Angelis, et al. 26th May 2014 8 / 30
Introduction
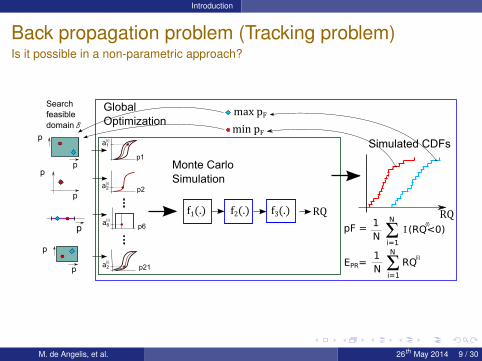
Back propagation problem (Tracking problem)Is it possible in a non-parametric approach?
p1
p2
p6
p21
p
p
p
p
p
p
p
Monte Carlo Simulation
RQ
Simulated CDFs
Global Optimization
a1i
a2i
a6i
a2i
Search feasible domain B minpF
maxpF
pF = 1N
i=1
N
I (RQ<0)i
EPR=1N
i=1
N
RQi
f1(.) f2(.) f3(.) RQ
M. de Angelis, et al. 26th May 2014 9 / 30

Introduction
Propagation of failure probabilitiesProblem statement
Characterize the problem:What is the targeted failure probability?How many state variables?Is the response quantity (RQ) monotonic?Does the RQ display a single mode?
M. de Angelis, et al. 26th May 2014 10 / 30
Introduction
Propagation of failure probabilitiesProblem statement
Characterize the problem:What is the targeted failure probability?How many state variables?Is the response quantity (RQ) monotonic?Does the RQ display a single mode?
Traditional reliability assessment:
ΘF = θ ∈ Θ | g(θ) ≤ 0 (1)
pF =
∫ΘF
hD(θ; p) dΘ (2)
M. de Angelis, et al. 26th May 2014 10 / 30
Uncertainty propagation
Outline
1 Introduction
2 Uncertainty propagationImprecise failure probabilityLine sampling estimation
3 ExamplesExplicit functionLarge scale finite element model
4 Conclusions
M. de Angelis, et al. 26th May 2014 11 / 30

Uncertainty propagation Imprecise failure probability
Generalized numerical framework of uncertainties
A bounded set B is defined by a vector of intervals x i , i = 1, ...,nxand a dependence function Φ(x)
B =×nxi=1[Φ(xi), Φ(xi)] (3)
A credal set C is the set of distribution functions
C = hD (ξ; p) | p ∈ Bp , Bp =×npi [pi , pi ] (4)
M. de Angelis, et al. 26th May 2014 12 / 30

Uncertainty propagation Imprecise failure probability
Generalized numerical framework of uncertaintiesA bounded set B is defined by a vector of intervals x i , i = 1, ...,nxand a dependence function Φ(x)
B =×nxi=1[Φ(xi), Φ(xi)] (3)
A credal set C is the set of distribution functions
C = hD (ξ; p) | p ∈ Bp , Bp =×npi [pi , pi ] (4)
Redefinition of failure domain:
ΘF = ΩF × XF (5)
where,ΩF (x) = ξ ∈ Rnξ | g(ξ,x) ≤ 0 , (6)
XF (ξ) = x ∈ Rnx | g(ξ,x) ≤ 0 . (7)
M. de Angelis, et al. 26th May 2014 12 / 30

Uncertainty propagation Imprecise failure probability
Failure probabilityLower and upper bounds
Lower and upper bounds of failure probability are
pF
(C,Bx ) = infx∈Bx p∈Bp
∫ΩF (x)
hD(ξ; p) dΩ; (8)
pF (C,Bx ) = supx∈Bx p∈Bp
∫ΩF (x)
hD(ξ; p) dΩ. (9)
M. de Angelis, et al. 26th May 2014 13 / 30

Uncertainty propagation Imprecise failure probability
Failure probabilityConjugate relationship
When the uncertainty setM is restricted to C only, i.e. M = C, theprobability function h that yields the lower bound p
Fsatisfies∫
ΩF
hD(ξ) dΩ +
∫ΩS
hD(ξ) dΩ = 1, (10)
where, ΩF ∪ ΩS = Ω. Then, Eq. (9) establishes a conjugate (dual)relationship
p(ΩS) = 1− p(ΩF ), (11)
with p(ΩS) =∫
ΩShD(ξ) dΩ and p(ΩF ) =
∫ΩF
hD(ξ) dΩ.
M. de Angelis, et al. 26th May 2014 14 / 30
Uncertainty propagation Line sampling estimation
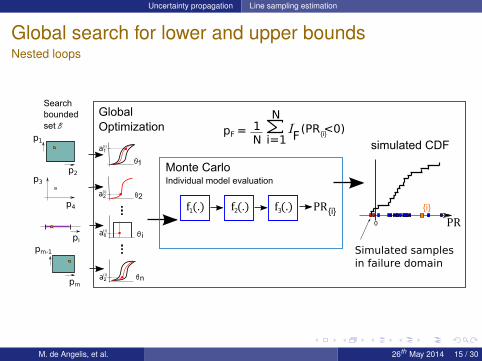
Global search for lower and upper boundsNested loops
1
2
i
n
f(.) f(.) PR
Monte Carlo Individual model evaluation
0 PR
simulated CDF
Global Optimization
i
a1i
a2i
a6i
a2i
Search bounded set B
if(.)1 2 3
p1
p2p3
p4
pi
pm-1
pm
pF =1N
I (PR <0)ii=1
N
F
Simulated samples in failure domain
M. de Angelis, et al. 26th May 2014 15 / 30
Uncertainty propagation Line sampling estimation
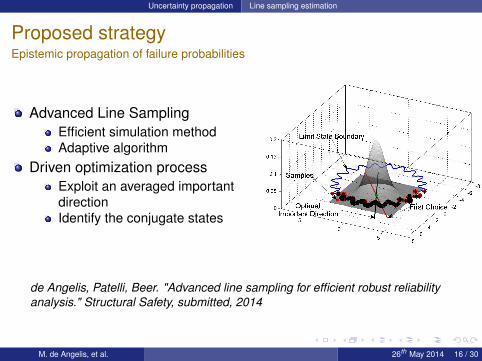
Proposed strategyEpistemic propagation of failure probabilities
Advanced Line SamplingEfficient simulation methodAdaptive algorithm
Driven optimization processExploit an averaged importantdirectionIdentify the conjugate states
de Angelis, Patelli, Beer. "Advanced line sampling for efficient robust reliabilityanalysis." Structural Safety, submitted, 2014
M. de Angelis, et al. 26th May 2014 16 / 30
Uncertainty propagation Line sampling estimation
Line Sampling
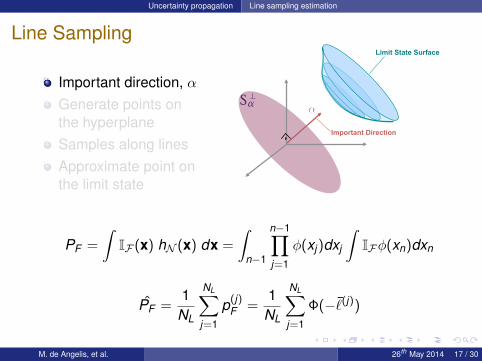
Important direction, αGenerate points onthe hyperplaneSamples along linesApproximate point onthe limit state
Limit State Surface
Sta
Important Direction
PF =
∫IF (x) hN (x) dx =
∫n−1
n−1∏j=1
φ(xj)dxj
∫IFφ(xn)dxn
PF =1
NL
NL∑j=1
p(j)F =
1NL
NL∑j=1
Φ(−¯(j))
M. de Angelis, et al. 26th May 2014 17 / 30

Uncertainty propagation Line sampling estimation
Line Sampling
Important direction, αGenerate points onthe hyperplaneSamples along linesApproximate point onthe limit state
Sta
PF =
∫IF (x) hN (x) dx =
∫n−1
n−1∏j=1
φ(xj)dxj
∫IFφ(xn)dxn
PF =1
NL
NL∑j=1
p(j)F =
1NL
NL∑j=1
Φ(−¯(j))
M. de Angelis, et al. 26th May 2014 17 / 30

Uncertainty propagation Line sampling estimation
Line Sampling
Important direction, αGenerate points onthe hyperplaneSamples along linesApproximate point onthe limit state
Line sample
Line
Xt(j) + l(j) a
Xt(j)
l(j)
Sta
PF =
∫IF (x) hN (x) dx =
∫n−1
n−1∏j=1
φ(xj)dxj
∫IFφ(xn)dxn
PF =1
NL
NL∑j=1
p(j)F =
1NL
NL∑j=1
Φ(−¯(j))
M. de Angelis, et al. 26th May 2014 17 / 30

Uncertainty propagation Line sampling estimation
Line Sampling
Important direction, αGenerate points onthe hyperplaneSamples along linesApproximate point onthe limit state
Intersectionw/ LSF
Xt(j) + l a
Sta
PF =
∫IF (x) hN (x) dx =
∫n−1
n−1∏j=1
φ(xj)dxj
∫IFφ(xn)dxn
PF =1
NL
NL∑j=1
p(j)F =
1NL
NL∑j=1
Φ(−¯(j))
M. de Angelis, et al. 26th May 2014 17 / 30
Uncertainty propagation Line sampling estimation
The search in BpImprecision in the distribution parameters
Aim is identifying the elements of Bpproducing lower and upper boundsThe failure domain ΘF does notchange as the search is performedin Bp
An averaged important direction canbe set for each iterationThe failure domain is invariant to theuncertainty setMThe adaptive algorithm updates theimportant direction to increase theaccuracy of estimations
M. de Angelis, et al. 26th May 2014 18 / 30

Uncertainty propagation Line sampling estimation
The search in BpImprecision in the distribution parameters
Aim is identifying the elements of Bpproducing lower and upper boundsThe failure domain ΘF does notchange as the search is performedin Bp
An averaged important direction canbe set for each iterationThe failure domain is invariant to theuncertainty setMThe adaptive algorithm updates theimportant direction to increase theaccuracy of estimations
1
- 3
- 2
- 1
Physical Space
xi
xj
Standard Normal Spaceuj
ui
M. de Angelis, et al. 26th May 2014 18 / 30

Uncertainty propagation Line sampling estimation
The search in BpImprecision in the distribution parameters
Aim is identifying the elements of Bpproducing lower and upper boundsThe failure domain ΘF does notchange as the search is performedin Bp
An averaged important direction canbe set for each iterationThe failure domain is invariant to theuncertainty setMThe adaptive algorithm updates theimportant direction to increase theaccuracy of estimations
1
- 3
- 2
- 1
Physical Space
xi
xj
Standard Normal Spaceuj
ui
M. de Angelis, et al. 26th May 2014 18 / 30

Uncertainty propagation Line sampling estimation
The search in BpImprecision in the distribution parameters
Aim is identifying the elements of Bpproducing lower and upper boundsThe failure domain ΘF does notchange as the search is performedin Bp
An averaged important direction canbe set for each iterationThe failure domain is invariant to theuncertainty setMThe adaptive algorithm updates theimportant direction to increase theaccuracy of estimations
1 2
- 3
- 2
- 1Standard Normal Spaceuj
ui
xi
xj Physical Space
M. de Angelis, et al. 26th May 2014 18 / 30

Uncertainty propagation Line sampling estimation
The search in BpImprecision in the distribution parameters
Aim is identifying the elements of Bpproducing lower and upper boundsThe failure domain ΘF does notchange as the search is performedin Bp
An averaged important direction canbe set for each iterationThe failure domain is invariant to theuncertainty setMThe adaptive algorithm updates theimportant direction to increase theaccuracy of estimations
1 2
- 3
- 2
- 1
uj
ui
xi
xj Physical Space
Standard Normal Space
M. de Angelis, et al. 26th May 2014 18 / 30

Uncertainty propagation Line sampling estimation
The search in BxImprecision in the structural parameters
Recall the definition of failure domain from Eq. (4):
ΩF (x) = ξ ∈ Rnξ | g(ξ,x) ≤ 0 ,
Intervals make the failure domain no longer invariant to theuncertainty setM,For the sake of searching in Bx , assume the intervals areimprecise Gaussian random variables
x → η ∈ Cx =
hN (η;µx ,σx ) | µx = x , σx ∈ [0,x r ], (12)
The uncertainty set is now the credal setM′ = C ∪ Cx
M. de Angelis, et al. 26th May 2014 19 / 30

Uncertainty propagation Line sampling estimation
The search in BxImprecision in the structural parameters
The search inM′ allows to identify the conjugate states
µ∗ = arg minM′
pF , µ∗ = arg maxM′
pF (13)
To these states it is associated the corresponding argumentminimum and maximum to be held within the intervals
(µx∗, µ∗x )→ (x∗, x∗) (14)
As the argument optima (x∗, x∗) are identified in Bx , just twomore reliability analyses are needed to estimate lower andupper failure probabilities.
M. de Angelis, et al. 26th May 2014 20 / 30

Examples Explicit function
Outline
1 Introduction
2 Uncertainty propagationImprecise failure probabilityLine sampling estimation
3 ExamplesExplicit functionLarge scale finite element model
4 Conclusions
M. de Angelis, et al. 26th May 2014 21 / 30

Examples Explicit function
Linear performance function with noisecase (a): description
g(ξ,x) = −500 + ξ1 + 2ξ2 + 2ξ3 + ξ4 − 5x1 − 5x2 +
+0.0014∑
i=1
sin(100ξi) + 0.0012∑
j=1
sin(100xj);
SV Symbol Uncert. type Mean/Interval Stand. dev.
1 ξ1 LN(µ1, σ1) µ1 = [110, 125] σ1 = [10, 14]
2 ξ2 LN(µ2, σ2) µ2 = [115, 130] σ2 = [10, 14]
3 ξ3 LN(µ3, σ3) µ3 = [115, 130] σ3 = [10, 14]
4 ξ4 LN(µ4, σ4) µ4 = [115, 130] σ4 = [10, 14]
5 x1 Interval x1 x1 = [45, 52] -6 x2 Interval x2 x2 = [35, 43] -
M. de Angelis, et al. 26th May 2014 22 / 30
Examples Explicit function
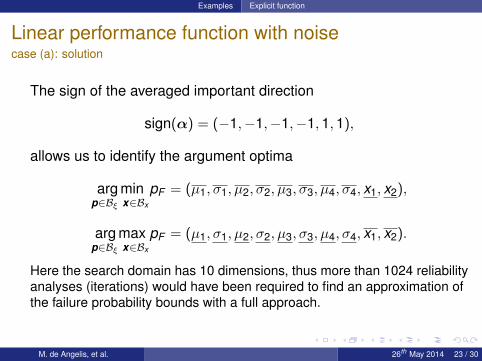
Linear performance function with noisecase (a): solution
The sign of the averaged important direction
sign(α) = (−1,−1,−1,−1,1,1),
allows us to identify the argument optima
arg minp∈Bξ x∈Bx
pF = (µ1, σ1, µ2, σ2, µ3, σ3, µ4, σ4, x1, x2),
arg maxp∈Bξ x∈Bx
pF = (µ1, σ1, µ2, σ2, µ3, σ3, µ4, σ4, x1, x2).
Here the search domain has 10 dimensions, thus more than 1024 reliabilityanalyses (iterations) would have been required to find an approximation ofthe failure probability bounds with a full approach.
M. de Angelis, et al. 26th May 2014 23 / 30
Examples Explicit function
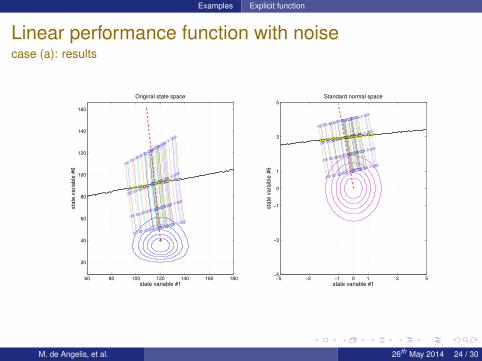
Linear performance function with noisecase (a): results
state variable #1
sta
te v
ariable
#6
Original state space
60 80 100 120 140 160 180
20
40
60
80
100
120
140
160
state variable #1
sta
te v
ara
ible
#6
Standard normal space
−5 −3 −1 0 1 3 5−5
−3
−1
0
1
3
5
M. de Angelis, et al. 26th May 2014 24 / 30
Examples Explicit function
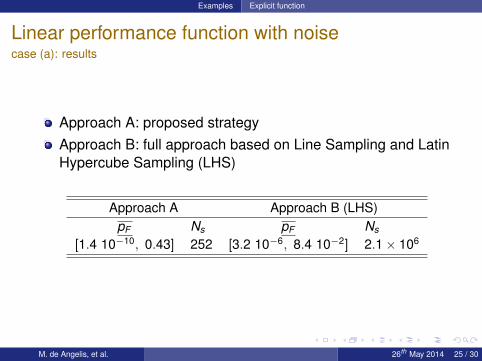
Linear performance function with noisecase (a): results
Approach A: proposed strategyApproach B: full approach based on Line Sampling and LatinHypercube Sampling (LHS)
Approach A Approach B (LHS)pF Ns pF Ns
[1.4 10−10, 0.43] 252 [3.2 10−6, 8.4 10−2] 2.1× 106
M. de Angelis, et al. 26th May 2014 25 / 30

Examples Large scale finite element model
Six-level buildingimprecision in distribution parameters
244 State Variables, 8200 elements,66300 degrees of freedomColumns’ depth and breadth are theinterval [0.36, 0.44]mPerformance function:g(θ) = |σI(θ)− σIII(θ)| /2− σy ,
Investigate sensitivity of failureprobabilities against imprecisionIdentify the worst case scenario
Robust realibility analysis
M. de Angelis, et al. 26th May 2014 26 / 30

Examples Large scale finite element model
Six-level buildingimprecision in distribution parameters
244 State Variables, 8200 elements,66300 degrees of freedomColumns’ depth and breadth are theinterval [0.36, 0.44]mPerformance function:g(θ) = |σI(θ)− σIII(θ)| /2− σy ,
Investigate sensitivity of failureprobabilities against imprecisionIdentify the worst case scenario
Robust realibility analysis
M. de Angelis, et al. 26th May 2014 26 / 30

Examples Large scale finite element model
Six-level buildingimprecision in distribution parameters
244 State Variables, 8200 elements,66300 degrees of freedomColumns’ depth and breadth are theinterval [0.36, 0.44]mPerformance function:g(θ) = |σI(θ)− σIII(θ)| /2− σy ,
Investigate sensitivity of failureprobabilities against imprecisionIdentify the worst case scenario
Robust realibility analysis
3 3.2 3.4 3.6 3.8 4 4.2 4.4 4.6 4.8
−1.5
−1
−0.5
0
0.5
1
x 107
distance fromhyperplane
performance
values
M. de Angelis, et al. 26th May 2014 26 / 30

Examples Large scale finite element model
Six-level buildingimprecision in distribution parameters
244 State Variables, 8200 elements,66300 degrees of freedomColumns’ depth and breadth are theinterval [0.36, 0.44]mPerformance function:g(θ) = |σI(θ)− σIII(θ)| /2− σy ,
Objectives:Investigate sensitivity of failureprobabilities against imprecisionIdentify the worst case scenario
Robust realibility analysis
3 3.2 3.4 3.6 3.8 4 4.2 4.4 4.6 4.8
−1.5
−1
−0.5
0
0.5
1
x 107
distance fromhyperplane
performance
values
M. de Angelis, et al. 26th May 2014 26 / 30
Examples Large scale finite element model
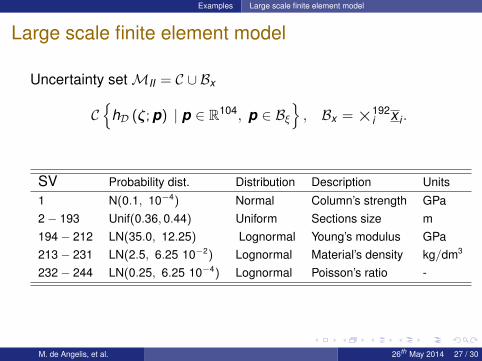
Large scale finite element model
Uncertainty setMII = C ∪ Bx
C
hD (ζ; p) | p ∈ R104, p ∈ Bξ, Bx =×192
i x i .
SV Probability dist. Distribution Description Units
1 N(0.1, 10−4) Normal Column’s strength GPa2 − 193 Unif(0.36, 0.44) Uniform Sections size m194 − 212 LN(35.0, 12.25) Lognormal Young’s modulus GPa213 − 231 LN(2.5, 6.25 10−2) Lognormal Material’s density kg/dm3
232 − 244 LN(0.25, 6.25 10−4) Lognormal Poisson’s ratio -
M. de Angelis, et al. 26th May 2014 27 / 30

Examples Large scale finite element model
Large scale finite element model
Uncertainty setMII = C ∪ Bx
C
hD (ζ; p) | p ∈ R104, p ∈ Bξ, Bx =×192
i x i .
SV Uncertainties type p = pc [1 − ε, 1 + ε], x = [x , x ]
1 distribution N(µ, σ2) µc = 0.1 σc = 0.012 − 193 interval x x = 0.36 x = 0.44194 − 212 distribution LN(m, v) mc = 35 vc = 12.25213 − 231 distribution LN(m, v) mc = 2.5 vc = 6.25 10−2
232 − 244 distribution LN(m, v) mc = 0.25 vc = 6.25 10−4
M. de Angelis, et al. 26th May 2014 27 / 30

Examples Large scale finite element model
Large scale finite element modelResults
Lower Bound Upper Boundε p
FCoV pF CoV Ns
0.000 4.70 10−7 10.2 10−2 6.73 10−3 11.5 10−2 2590.010 2.28 10−7 13.4 10−2 9.71 10−3 12.2 10−2 2470.015 1.10 10−7 10.3 10−2 1.11 10−2 7.6 10−2 2550.020 5.19 10−8 13.1 10−2 2.08 10−2 14.6 10−2 2550.025 2.51 10−8 9.97 10−2 2.72 10−2 15.3 10−2 2490.030 1.40 10−8 9.94 10−2 3.21 10−2 6.5 10−2 254
M. de Angelis, et al. 26th May 2014 28 / 30

Examples Large scale finite element model
Large scale finite element modelResults
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
mem
bers
hip
pc(1- ) pc(1+ )3 3pc
3=0.03
3=0.075
3=0.05
3=0.025
3=0.01
3=0
10−8
10−7
10−6
10−5
10−4
10−3
10−2
10−1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
mem
bers
hip
pF
(a) (b)
M. de Angelis, et al. 26th May 2014 28 / 30

Conclusions
Outline
1 Introduction
2 Uncertainty propagationImprecise failure probabilityLine sampling estimation
3 ExamplesExplicit functionLarge scale finite element model
4 Conclusions
M. de Angelis, et al. 26th May 2014 29 / 30
Conclusions
Final remarksA strategy to propagate epistemic uncertainty with the failureprobability was proposedBounded and Credal sets are formulated as a sound way toaccount for epistemic uncertainty in a parametric senseWith the proposed numerical strategy, uncertainty propagation’sefficiency can be significantly increasedWhen the underlying model displays monotonic, time of theanalysis is comparable to a single Monte CarloThe strategy is generally applicable so far as the model displaysa single failure modeThe solution strategy is integrated in the general purposesoftware Open Cossan
M. de Angelis, et al. 26th May 2014 30 / 30