abcpw.bg.pw.edu.pl/content/767/12zdau_kryterium.pdf · kryterium routha-hurwitza równanie...
TRANSCRIPT

- 156 -
Podstawiając (6.38) do (6.37), znaleziono
j<J t r \
i ° • xQ cos(wot) + jsin(w Q t)l,
3S(u t ) - jsinfw t) .0 0 1
J
- x o e
( 6 . 3 9 )
Obydwa rozwiązania (6.39) są zespolone. Jeżel i teraz przyjmie
s i ę , że x=(x+x)/2, to z (6.39) otrzyma się odpowiedź rzeczy-1 2
wista (i zgodną z intuicją)x = x cos (wQ
(6.40)
6.3.2. Kryterium Routha-Hurwitza
Równanie charakterystyczne układu liniowego (6.31) lub
(6.35) można przedstawić w postaci4)
aQsn + a^""1 + + a sn-l
a = 0 . (6.41)
Warunkiem koniecznym globalnej stabilności asymptotycznej
układu o równaniu charakterystycznym (6.41) jest wymóg aby
wszystkie współczynniki a równania (6.41) spełniały warunek
Warunkiem dostatecznym - aby wszystkie podwyznaczniki Ai
( i=2,3, . . . ,n-l) wyznacznika An o budowie:
i=2: A i-3l A3 = itd aż do i=n-l
(6.42)były większe od zera.
Jeżeli jeden lub więcej niż jeden podwyznacznik (6.42) jestrówny zeru, to układ jest stabilny globalnie ale nie asympto-tycznie (w układzie występują niegasnące drgania o stałej am-plitudzie) .
4)Spotyka się również inną postać tego równania: współczynnikprzy najwyższej potędze s, a więc iT jest a , a nie a . Czy-telnik za chwilę sprawdzi, ze postać (6.41) prowadzi do ł a t -wiejszych do zapamiętania algorytmów badania stabilności.
- 157 -
Przykład 6.6Równanie charakterystyczne układu ma postać 2s3+4s2+10s+3=0.
Sprawdzić stabilność układu.Warunek konieczny jest tu spełniony, bo wszystkie współ-
czynniki wielomianu są dodatnie i różne od zera. Dla sprawdze-nia warunku dostatecznego wprowadza się oznaczenia: a =2, a =4,a =10 oraz a =3. Stopień n wielomianu charakterystycznego jesttu równy 3. Wystarczy więc sprawdzić jeden podwyznacznik:
= 40-6 = 34 > 0.4 3
2 10
Układ jest więc stabilny globalnie i asymptotycznie.
Przykład 6.7
Ponawia się zadanie przykładu 6.6 dla równania charakterys-tycznego: 3s4+2s3+5sz+3s+4=0.
Warunek konieczny jest tu spełniony. Badania podwyznaczni-ków dają
2 3 03 5 4 = -13 < 0.0 2 3
A =2
= 10-9 = 1 > 0;
0.
Badany układ jest niestabilny.
Przykład 6.8
W tym przykładzie równanie charakterystyczne ma postać
4s3+2s2+4 , 5s+2 , 25=0 .
Warunek konieczny jest tu spełniony, ale
2 2,25
2 4 4,5
Tym samym układ jest stabilny globalnie ale nie asymptotycznie.
Przykład 6.9
Rozpatruje się podobne równanie charakterystyczne jak w
przykładzie 6.7 ale dla aa=0: 3s4+2s3+3s+4=0.
Układ jest niestabilny ponieważ nie jest spełniony warunek
konieczny (a =0).
Przykład 6.10
Dla utrzymania stałości prędkości kątowej u śmigła samolotu
niezbędne jest przestawianie kąta natarcia <p śmigła w zależnoś-
- 158 -
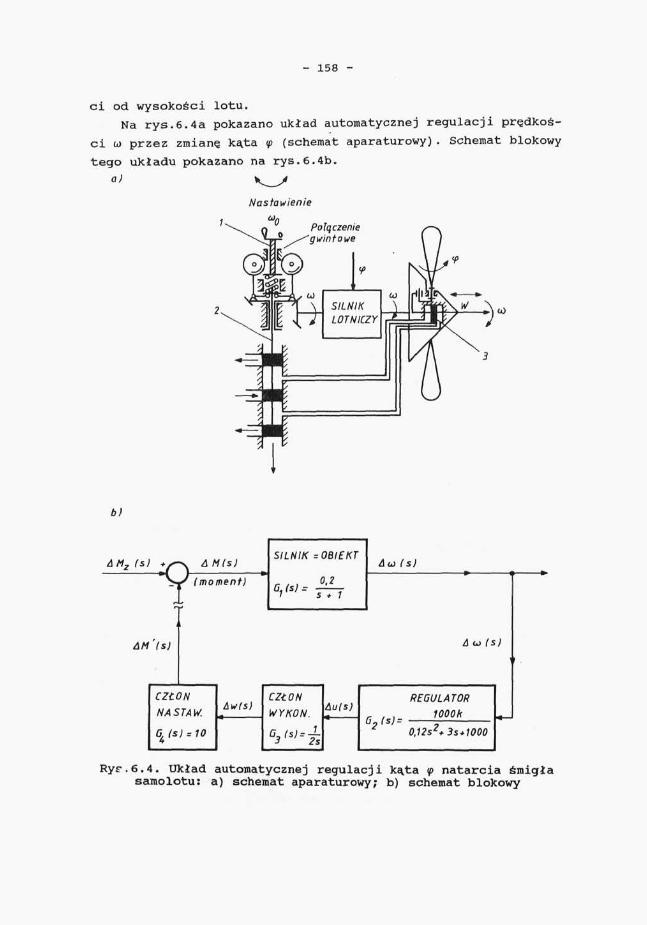
ci od wysokości lotu.
Na rys.6.4a pokazano układ automatycznej regulacji prędkoś-
ci w przez zmianę kąta <p (schemat aparaturowy) . Schemat blokowy
tego układu pokazano na rys.6.4b.
a) % J
Nastawienie
b)
AM, fs) łx-v AM/s)O
AM IsJ
(moment)
CZŁONNASTAW.
SILNIK = OBIEKT
ńw(s)CZtONWYKON. Auls)
m
(s)
(s)
G2(s) =
REGULATORtOOOk
0,12sz+3s*1000
Ryr.6.4. Układ automatycznej regulacji kąta <p natarcia śmigłasamolotu: a) schemat aparaturowy; b) schemat blokowy

- 159 -
Transmitancja operatorowa układu otwartego
G (s) = 1 0 0 Q k .0 (s+1)(0,12s2+3s+1000)S
Należy określić wartość k, dla której układ z ujemnym sprzęże-
niem zwrotnym jest jeszcze stabilny.
Równanie charakterystyczne układu zamkniętego otrzymuje się
po uwzględnieniu (6.45): (s+1) (0,12sz+3s+1000) s+1000k=0, czyli
0,12s*+3,12s3+1003s2+1000s+1000k=0. Ponieważ A 2 = | Q ' ^ |
to należy określić A i znaleźć taką wartość k, dla której
A =0, czyli zachodzi stabilność obojętna3
3,12 1000 0
0,12 1003 lOOOk
0 3,12 1000
= 3,12(1003-1000-3,12-1000k) +
- 1000'0,12-1000 = 0.
Po rozwiązanniu równania A =0 względem k otrzymano k=309,15.
Układ jest więc stabilny asymptotycznie gdy k<309,15.
6.3.3. Kryterium Nyąuista
Kryterium Nyąuista pozwala na określenie stabilności układu
zamkniętego na podstawie charakterystyki amplitudowo-fazowej
układu otwartego, wyznaczonej analitycznie lub doświadczalnie.
Ma ono duże znaczenie praktyczne, szczególnie w przypadku ukła-
dów rzeczywistych, które może być trudno opisać analitycznie.
Na rys.6.5 pokazano, jak z układu zamkniętego uzyskuje się
układ otwarty (przerwanie pętli sprzężenia zwrotnego przed węz-
łem sumacyjnym). Transmitancje operatorowe układów zamkniętych
G (s) oraz G (s) dla przypadku a) i b) sa_ różne ale trans-z,a ztb
mitancje obydwu układów otwartych są takie same
L («)L (a)
Warto tu wyjaśnić, że równania charakterystyczne układów otwar-tych
<pQ(s) - M^sJM^s) = 0 (6.44)
oraz zamkniętych
są w obydwu przypadkach również identyczne
+M i(s)M z(s), (6.45)

- 160 -
a)
Ljts!
Mi'S>
02!s)
Li(s,
G2(s) =L2(s)
M2(s)
L2(s)
M2(s)
Y/s!
Yts)
Rys.6.5. Pojęcie układu otwartego i zamkniętego
Przed sformułowaniem kryterium Nyquista rozpatruje się
wstępnie równanie charakterystyczne dowolnego układu (zamknię-
tego lub otwartego), wykorzystując (6.31), zakładając występo-
wanie tylko pierwiastków jednokrotnych oraz podstawiając s=jw
<p(jw) = (ju-Sj) (ju-sz) ... (ju-sj = 0. (6.46)
W równaniu tym n jest stopniem równania charakterystycznego a
s są jego pierwiastkami.
Równanie (6.46) jest iloczynem liczb zespolonych, tym samym
n- TT l(J«-s.)l oraz arg £ arg(jw-s ). (6.47)
i
Na rys.6.6 przedstawiono poglądowo na płaszczyźnie zmiennejzespolonej s różnicę dwóch wektorów j(j i s , umieszczając przy-kładowo dwa pierwiastki w lewej i prawej półpłaszczyźnie. Jeże-li pulsacja u zmienia się od -co do +a> to wektor jw-s dokonujeobrotu o +71 dla pierwiastka s znajdującego się w lewej pół-
płaszczyźnie s
płaszczyźnie.i obrotu o -TT dla pierwiastka s w prawej pół-

- 161 -
Im
jej - s
(u < 01
Rys.6.6. Obroty wektorów jto-s przy zmianie
pulsacji w od -co do -h»
Jeżeli wszystkie pierwiastki (6.46) leżą w lewej półpłasz-
czyźnie (jest to warunek stabilności asymptotycznej badanego
układu) to dla w zmieniającego się od -« do +oo wektor p(jw)
powinien obrócić się o kąt równy mr. Po przedstawieniu (6.46)
ponownie w postaci (6.41) i podstawieniu s=ju można wykazać,
że <p (jw)=P(u) +jQ(w) . Łatwo udowodnić, że P((o)=P(-u) oraz
Q(w)=-Q(-a>) . Wystarczy tu więc rozpatrzyć zmianę pulsacji u od
0 do +oo, ponieważ hodografs) (p(jw) jest symetryczny na płasz-
czyźnie s względem osi rzeczywistej. Tym samym dla u zmieniają-
cego się od 0 do +» wektor p(jw) powinien obrócić się o kąt TT^,
jeżeli układ ma być stabilny asymptotycznie. Jest to dowodem
poprawności kryterium stabilności Michajłowa: układ dynamiczny
jest stabilny asymptotycznie, gdy hodograf weHtora p(jw) na
płaszczyźnie zmiennej zespolonej s, przy zmianie pulsacji ca od
0 do oo, zakreśla drogę kątową, n1—.
B) Krzywa zakreślona na płaszczyźnie s przez koniec wektora

- 162 -
Z braku miejsca kryterium to nie będzie w dalszym ciągu
ilustrowane przykładami.
Dla obydwu schematów na rys.6.5 mianownik transmitancji
Gz(s) układu zamkniętego jest równy l+GQ(s). Po podstawieniu
s=jw można napisać
(jw)L (jw)+M (ju)M (jw) ip (ju>)( 6 - 4 8 )
Tym samym zmianę argumentu funkcji l+GQ(jw) przedstawia się w
postaci
A arg [l+G (jw)] = A arg [ip (ju)] - A arg |>0(ju)]. (6.49)
Jeżeli układ otwarty jest stabilny asymptotycznie i ma po-
zostać tak samo stabilny po zamknięciu, to przyrost argumentu
1+G (ju) dla oswsco powinien być równy zeru, zgodnie z kryteriumG
Michajłowa, ponieważ wielomiany ¥>0(s) i ł>z(s) są tego samego
stopnia n. Warunek ten jest spełniony, gdy dla hodografu
1+G (jw) na płaszczyźnie s rozpoczynającego się na osi rzeczy-
wistej (w=0) i na niej kończącego (w=«), punkt (-l,jO) znajduje
się na zewnątrz hodografu.
Wykres G (ju) na płaszczyźnie zmiennej zespolonej s jest
charakterystyką amplitudowo-fazową układu otwartego- Jeżeli
charakterystyka ta dla O^wsm nie obejmuje punktu (-l,jO), to
punkt ten znajduje się na zewnątrz hodografu 1+G (ju) . Tym sa-
mym układ zamknięty jest stabilny asymptotycznie, jeżeli odpo-
wiadający mu układ otwarty jest również stabilny, a wykres
Go(jw) nie obejmuje punktu (-l,jO).
Kryterium Nyąuista dla tego przypadku można ująć następują-
co.
Jeżeli układ otvarty jest stabilny asymptotycznie, to pozo-
staje tak samo stabilny po zamknięciu, gdy charakterystyka
Go(jw) dla oswsm nie obejmuje punktu (-l,jO). Gdy charakterys-
tyka GQ(JCJ) przechodzi przez punkt (-l,jo), to układ zamknięty
jest na granicy stabilności (stabilny ale nie asymptotycznie).
Przykład 6.11
-ST
Zbadać stabilność układu, dla którego G (s)= ~ .
Po podstawieniu s=jw otrzymuje się po przekształceniach

- 163 -
l+(TzU)'cos (Tu) - T wsin(T w) +
- j sin(Tu) + T wcos(T u) 11. (6.50)
Z zależności tej wynika, że dla w=0 G (ju)=k.
Punkt przecięcia charakterystyki amplitudowo-fazowej z osią
rzeczywistą znajduje się po przyrównaniu do zera części urojo-
nej (6.50). Daje to równanie
Tu + tq(T u ) = 0 .2 k ^ v 1 k'
(6.51)
Można je rozwiązać względem u wykreślnie lub numerycznie (np.
metodą Newtona). Po podstawieniu znalezionej w ten sposób war-
tości u^ do części rzeczywistej (6.50) sprawdza się, czy jest
ona większa lub mniejsza od -i, co w tym przypadku wystarcza do
oceny stabilności badanego układu po jego zamknięciu. (Na tym
etapie można wyznaczyć również tzw. zapas modułu, o którym jest
mowa w dalszym ciągu tego punktu)._
Niech dane liczbowe przykładu wynoszą T =n s, T 2=2TT S oraz
k=l. Numerycznie znaleziono z (6.51) w =0,585 rd/s. WykresG (Jw) pokazano na rys.6.7. Z analizy przebiegu wykresu na tym
rysunku wynika, 2e przy danych liczbowych zadania, badany układ
jest stabilny po zamknięciu, ponieważ charakterystyka G Q
nie obejmuje punktu (-l,jO), a układ otwarty jest stabilny.
* Im
Rys.6.7. Ilustracja do przykładu 6.11.Charakterystyka amplitudowo-fazowa ukła-du, który po zamknięciu jest stabilny
- 164 -
Jeżeli dla tych samych stałych: T^n s i T2=27T S przyjmie
się inną niż 1 wartość k, to początkiem charakterystyki GQ(ju)
będzie punkt k na osi Re, a punktem jej przecięcia z tą osią -
punkt -0,267k. Łatwo stąd wyznaczyć wartość graniczną kgr=3,75,
powyżej której badany układ po zamknięciu staje się niestabil-
ny.
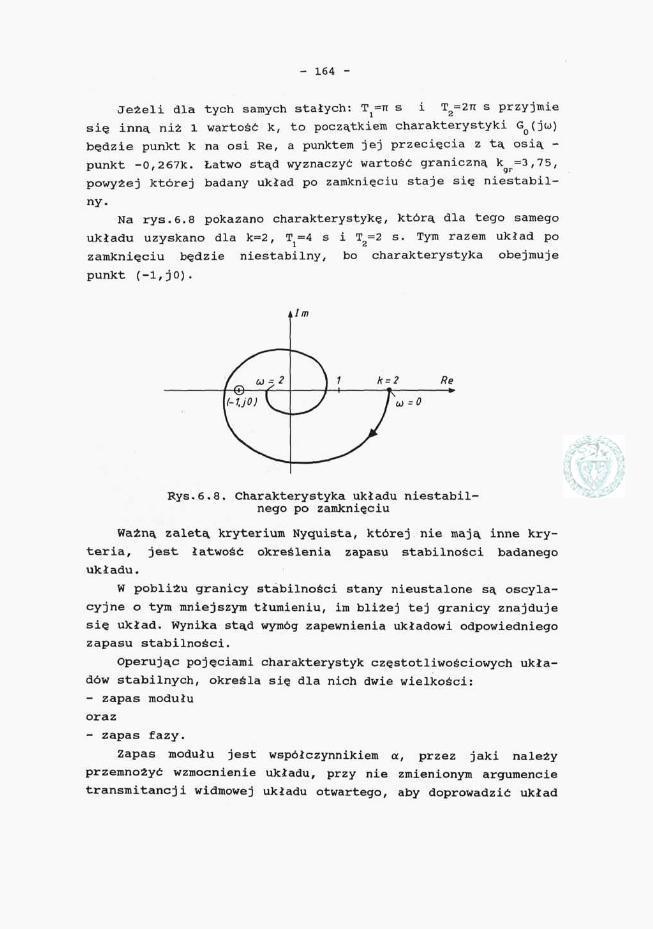
Na rys.6.8 pokazano charakterystykę, którą dla tego samego
układu uzyskano dla k=2, 0̂ =4 s i T2=2 s. Tym razem układ po
zamknięciu będzie niestabilny, bo charakterystyka obejmuje
punkt (-1,jO).
kim
Re
Rys.6.8. Charakterystyka układu niestabil-nego po zamknięciu
Ważną zaletą kryterium Nyąuista, której nie mają inne kry-teria, jest łatwość określenia zapasu stabilności badanegoukładu.
W pobliżu granicy stabilności stany nieustalone są oscyla-cyjne o tym mniejszym tłumieniu, im bliżej tej granicy znajdujesię układ. Wynika stąd wymóg zapewnienia układowi odpowiedniegozapasu stabilności.
Operując pojęciami charakterystyk częstotliwościowych ukła-dów stabilnych, określa się dla nich dwie wielkości:- zapas modułuoraz
- zapas fazy.
Zapas modułu jest współczynnikiem a, przez jaki należy
przemnożyć wzmocnienie układu, przy nie zmienionym argumencie
transmitancji widmowej układu otwartego, aby doprowadzić układ

- 165 -
do granicy stabilności. Zapas fazy kip, mierzony w stopniach,określa wartość zmiany argumentu transmitancji widmowej układuotwartego przy nie zmienionym wzmocnieniu, która przynosi tensam skutek.
Na rys.6.9 pokazano przypadek charakterystyki G (ju) ukła-du, dla którego obydwie wielkości wyznacza się w łatwy sposóbwykreślnie. Jeżeli podziałki osi Im i Re są jednakowe, to punktA przecięcia okręgu jednostkowego zakreślonego z początku ukła-du współrzędnych z charakterystyką G (ju) wyznacza kąt A». Za-
bpas modułu a wyznacza się z zależności a= —. Dla układu z rys.' • II f\
6.9 znaleziono w ten sposób Ap=75° oraz a=2,43.
Rys.6.9. Wyznaczanie zapasu modułu i fazy
Zapasy stabilności można również określić analitycznie
(por. przykład 6.11). Wymaga to określenia pulsacji IÓ , dla
której część urojona G (ju) ma wartość zerową, a następnie wy-
znaczenia dla tej pulsacji części rzeczywistej G (jw). W tensposób określa się zapas modułu a. Określenie zapasu fazy hęwymaga znalezienia wartości w , dla której |Go(jcj)|=l. Po pod-stawieniu u do G (jw) oblicza się P(w ) oraz Q(<-O i wyznaczaAy z zależności: ' Ap=1800-arctg(Q(c<> )/P(u ))^ W praktyce stosujesię zapas modułu O<Ł2 (odpowiada "to~"wzmocnieniu 201og 2=6 dB)
oraz zapas fazy
Kryterium Nyquista w przypadku astatycznych układów otwartych
Wiele układów regulacji automatycznej zawiera człony całku-
jące, które są źródłem astatyzmu odpowiadających im układów ot-
wartych. Liczba takich członów, połączonych szeregowo z innymi
- 166 -
członami elementarnymi nie przekracza w praktyce dwóch. Rozpat-
ruje się więc zwykle tylko układy z jednym członem całkującym
(układy astatyczne pierwszego rzędu) i z dwoma takimi członami
(układy astatyczne drugiego rzędu).
Wykreślenie pełnej charakterystyki amplitudowo-fazowej
G (jw) dla OSŁfcsra w obydwu przypadkach jest utrudnione nieogra-
niczonym wzrostem modułu \G (ju)I dla pulsacji zbliżonej do ze-
ra. Nie jest to zresztą potrzebne, bo istotne dla badania sta-
bilności układu informacje zawarte są w tych fragmentach, które
przebiegają w okolicach punktu krytycznego (-l,jO) i kończą się
dla w=« - w początku układu współrzędnych.
Metoda Nyąuista badania stabilności układów, które po ot-
warciu sa astatyczne, jest podobna do omawianej już metody ba-
dania układów statycznych. Różnica polega tylko na tym, że cha-
rakterystykę amplitudowo-fazową astatycznego układu otwartego
uzupełnia się fragmentem umownego okręgu o nieskończenie dużym
promieniu, tak aby rozpoczynała się ona na dodatnim odcinku osi
Re. Metoda ta, której uzasadnienie teoretyczne jest podane
m.in. w pracach [2] i [7], zostanie zilustrowana prostym przy-
kładem.
Przykład £.12
Rozpatruje się otwarty układ astatyczny pierwszego rzędu o
transmitancji Gp(s>~s(T s+1) (/s+1) (T s+l) ' Jest to dość ogólny
1 2 3
przypadek członu całkującego połączonego szeregowo z trzema
członami inercyjnymi pierwszego rzędu, które łącznie odpowiada-
ją jednemu członowi inercyjnemu trzeciego rzędu. Przy zerowej
wartości jednej ze stałych czasowych otrzymuje się człon iner-
cyjny drugiego rzędu, a gdy tylko jedna stała różni się od zera
- pierwszego rzędu.
Po podstawieniu s=jw do GQ(s) i odpowiednich przekształce-
niach otrzymano
arg
Re
Im
c
G c
Go
( j
.(ju)
(jw)
to) ==
P(U)
= Q(w) . -k(lCt)
- arctg
"i
-</c)N '
2
oifau2
c- b )
( 6 .
( 6 .
( 6 .
52)
53)
54)

- 167 -
przy oznaczeniach: a=T T T : b=T +T +T ; c=T T +T T +T T oraz1 2 3 1 2 3 ' 1 2 1 3 2 3
N = (j2(awz-b)2 + ( i - w 2 c ) 2 . (6.55)
Po przyrównaniu Q(u) do zera znaleziono pulsację w , dlaktórej charakterystyka G (ju) przecina oś Re
1u =k
(6.56)
Jeżeli wartości tej odpowiada P(w)=-l, to układ otwarty pozamknięciu znajdzie się na granicy stabilności.
Po podstawieniu (6.56) do (6.52) i przyrównaniu do -1otrzymano graniczną wartość k=kk, dla której układ po zamknię-ciu przestaje być stabilny
\ = ^ - (6.57)
Z postaci wzorów (6.56) i (6.57) wynika, że obydwie wartoś-ci krytyczne: u i k zależą od wartości stałych T , T i T .
k K 1 2 3
Po przyjęciu k=l uzyskano przykładowy wykres fragmentu
charakterystyki układu otwartego dla T =1 s, T =2 s oraz T =3 s1 2 3
(rys.6.10a). Dla tych danych układ po zamknięciu będzie niesta-bilny, ponieważ punkt krytyczny -l,jo jest objęty przez charak-terystykę układu otwartego (uzupełnioną ćwierćokręgiem o nie-skończenie dużym promieniu). Wynik ten potwierdza uzyskana war-tość z (6.57) kk=0,4959, ponieważ k=l > kk=0,4959. Układ tenbędzie stabilny po zamknięciu jeżeli wzmocnienie k zostaniezmniejszone do wartości mniejszej od k̂ .
m
7
b)
s—•—<
ImT1 = 9,25
T2= 9,5
T3= 1
= 2
^ \
/
Re
I
1
Rys.6.10. Badanie stabilności układów otwartych z astatyzmempierwszego rzędu: a) układ, który po zamknięciu jest niestabil-
ny; b) układ, który po zamknięciu jest stabilny
- 168 -
Po zmianie wartości stałych na 1^=0,25, T2=0,5 oraz T3=luzyskano przebieg charakterystyki, która dla k=l nie obejmujejuż punktu krytycznego (rys.6.l0b), a więc dotyczy układu,który po zamknięciu będzie stabilny.
Ze wzorów (6.52), (6.53) oraz (6.55) wynika, że dla w—>+0P(u)—>-kb oraz Q(w)—»-«. Charakterystyka układu otwartego dlaw—H-0 zbliża się do półprostej leżącej w trzeciej ćwiartce,równoległej do osi Im i odległej od niej o kb.
W przykładzie 6.12 omówiono przypadek, w którym przy odpo-wiednim doborze parametrów można było uzyskać stabilność układuzamkniętego, mimo że układ otwarty był astatyczny. Istniejąjednakże układy, w których żadne zmiany parametrów nie zapew-niają stabilności. Na przykład, jeżeli układ otwarty jest sze-regowym połączeniem co najmniej dwóch członów całkujących orazczłonu inercyjnego dowolnego rzędu, to jego charakterystyka am-plitudowo-fazowa (uzupełniona odpowiednim fragmentem okręgu onieskończenie dużym promieniu) obejmuje punkt krytyczny przydowolnych (ale dodatnich) wartościach współczynnika wzmocnie-nia oraz stałych czasowych. Dla zapewnienia stabilności układujest w tym przypadku niezbędna zmiana jego struktury. Dlatego otakich układach mówi się, że są niestabilne strukturalnie.
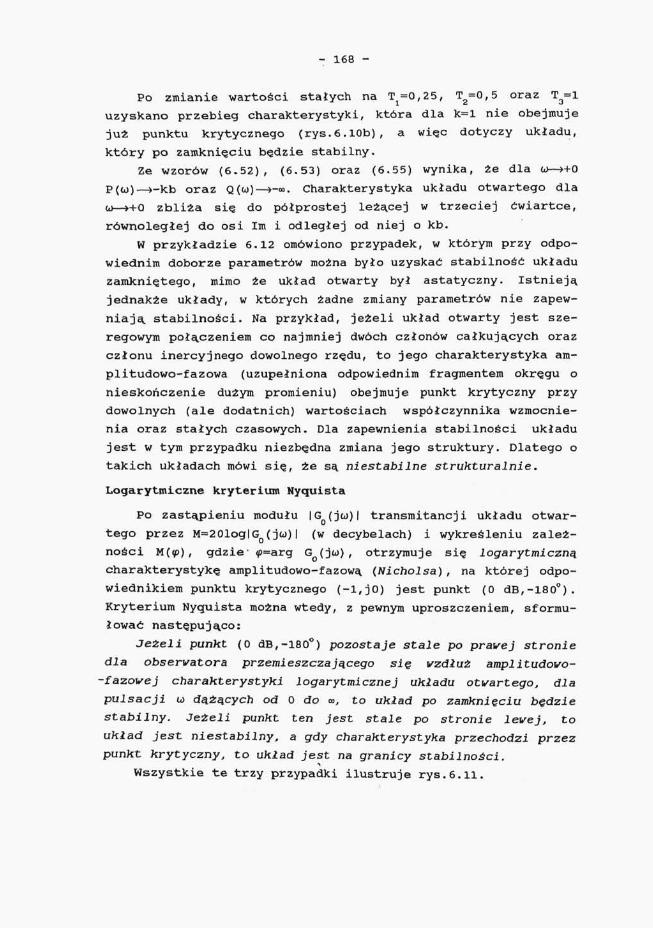
Logarytmiczne kryterium Nyquista
Po zastąpieniu modułu |G (ju) | transmitancji układu otwar-tego przez M=201og|Go(jw) I (w decybelach) i wykreśleniu zależ-ności M(*>), gdzie- ̂ =arg GQ(jo>), otrzymuje się logarytmicznącharakterystykę amplitudowo-fazową (Nicholsa) , na której odpo-wiednikiem punktu krytycznego (-l,jO) jest punkt (0 dB,-180°).Kryterium Nyquista można wtedy, z pewnym uproszczeniem, sformu-łować następująco:
Jeżeli punkt (0 dB,-180°) pozostaje stale po prawej stroniedla obserwatora przemieszczającego się wzdłuż amplitudowo--fazowej charakterystyki logarytmicznej układu otwartego, dlapulsacji u dążących od 0 do <*>, to układ po zamknięciu będziestabilny. Jeżeli punkt ten jest stale po stronie lewej, toukład jest niestabilny, a gdy charakterystyka przechodzi przezpunkt krytyczny, to układ jest na granicy stabilności.
Wszystkie te trzy przypadki ilustruje rys.6.11.
- 169 -
...na granicystabilności
Rys.6.11. Charakterystyki Nicholsa
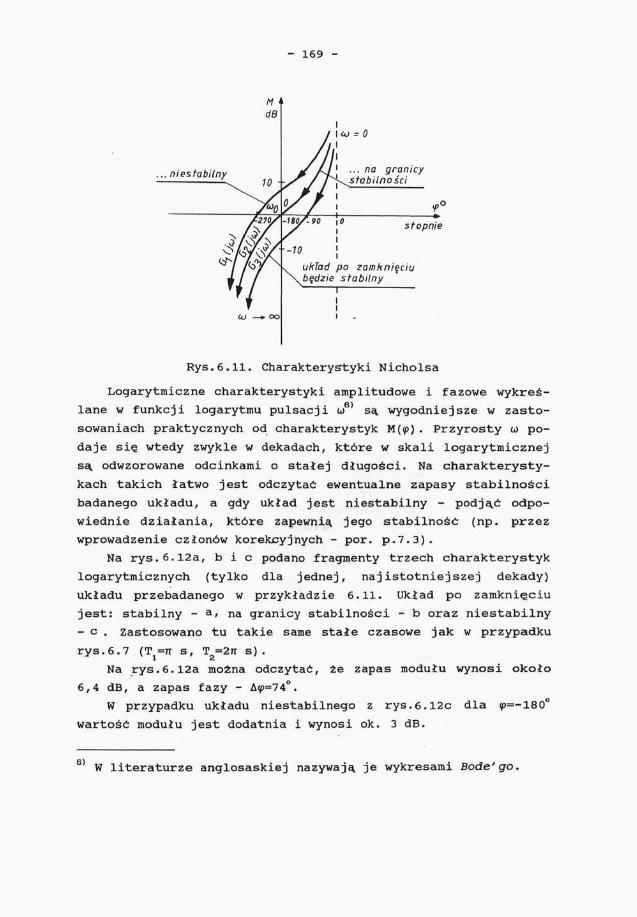
Logarytmiczne charakterystyki amplitudowe i fazowe wykreś-lane w funkcji logarytmu pulsacji we) są wygodniejsze w zasto-sowaniach praktycznych od charakterystyk VL(<p) . Przyrosty u po-daje się wtedy zwykle w dekadach, które w skali logarytmicznejsą odwzorowane odcinkami o stałej długości. Na charakterysty-kach takich łatwo jest odczytać ewentualne zapasy stabilnościbadanego układu, a gdy układ jest niestabilny - podjąć odpo-wiednie działania, które zapewnią jego stabilność (np. przezwprowadzenie członów korekcyjnych - por. p.7.3).
Na rys.6.12a, b i c podano fragmenty trzech charakterystyklogarytmicznych (tylko dla jednej, najistotniejszej dekady)układu przebadanego w przykładzie 6.11. Ukiad po zamknięciujest: stabilny - a/ na granicy stabilności - b oraz niestabilny- c . Zastosowano tu takie same stałe czasowe jak w przypadkurys. 6.7 (T^TT S, T =2n s) .
Na rys.6.l2a można odczytać, że zapas modułu wynosi około6,4 dB, a zapas fazy - Ay=74°.
W przypadku układu niestabilnego z rys.6.12c dla ^=-180°wartość modułu jest dodatnia i wynosi ok. 3 dB.
6) W literaturze anglosaskiej nazywają je wykresami Bodę' go.

- 170 -
a)20
10
b) c)
-10
-20
dB
t = 2
-90"
-130c
-270c
dB
-270c
dB
Mlu)
0
-10
>)
ł . s
- 90
-270°
0,1 co, rad/s 1 0,1 1 0,1
Rys.6.12. Logarytmiczne charakterystyki amplitudowe i fazowe:a) układ po zamknięciu stabilny; b) układ na granicy stabilnoś-
ci; c) układ niestabilny
Na zakończenie tego przykładu warto zanotować ogólne spo-
strzeżenie:
Układ otwarty jest po zamknięciu stabilny, gdy:
dla <p(w)=-180° M((j)<0,
dla M(w)=0 dB °
Wykreślanie dokładnych charakterystyk logarytmicznych wyma-ga żmudnych obliczeń, jeżeli wykonuje się je na kalkulatorze.Stosowana jest więc powszechnie pewna uproszczona metoda, wktórej charakterystyki M(w) zastępuje się odcinkami linii pros-tych (asymptot przebiegów dokładnych), a przebiegi <p(u)) - szki-cuje wg pewnych punktów charakterystycznych dla poszczególnychczłonów. Sposób postępowania wyjaśniony już był w rozdziale 4.Przykłady różnych, rozwiązanych w ten sposób zadań, Czytelnikznajdzie w pracach [2], [5] i [7]. Obecnie znacznie dokładnieji szybciej rozwiązuje się takie zadania przy użyciu komputera.W rozdziale 7 zamieszczono opis programu LOG4, który jest mię-dzy innymi przeznaczony do tych celów.
Bibliografia
1. Gibson J.E.: Nieliniowe układy sterowania automatycznego.(INT, Warszawa 1968.
2. Kaczorek T. : Teoria układów regulacji automatycznej. CzęśćII, zeszyt 2. WPW, Warszawa 1974.

- 171 -
Mazurek J., Vogt H. , Żydanowicz W.: Podstawy automatyki.WPW, Warszawa 1983.
P.A. ( p e a . ) : MeToflw wcc/ieaoBaHMfl He/iMHeŃHbixaBTOMaTMHecKoro ynpaB/ieHMfl. Itofl. HayKa, MocKBa 1 9 7 5 .
5. Pełczewski W.: Teoria sterowania. WNT, Warszawa 1980.
6. Thaler G.J., Pastel M.P.: Nieliniowe układy automatycznegosterowania. WNT, Warszawa 1965.
7. Żelazny M.: Podstawy automatyki. PWN, Warszawa 1967.