advanced validation risk-informed approach for the
TRANSCRIPT

iii
INL/EXT-18-44976
Advanced Validation Risk-Informed Approach for
the Flooding Tool Based Upon Smooth Particle
Hydrodynamics
- Validation and Development Status of NEUTRINO
Junsoo Yoo
Yong-Joon Choi
March 2018
DOE Office of Nuclear Energy

NOTICE
This report was prepared as an account of work sponsored by an agency of the
United States Government. Neither the United States Government nor any
agency thereof, nor any of their employees, makes any warranty, express or
implied, or assumes any legal liability or responsibility for any third party’s use,
or the results of such use, of any information, apparatus, product, or process
disclosed in this report, or represents that its use by such third party would not
infringe privately owned rights.

Advanced Validation Risk-Informed Approach for the
Flooding Tool Based Upon Smooth Particle
Hydrodynamics
- Validation and Development Status of NEUTRINO
Junsoo Yoo
Yong-Joon Choi
March 2018
Idaho National Laboratory
Idaho Falls, Idaho 83415

iii
ABSTRACT
Risk-Informed validation is to focus advanced validation on high-priority and critical elements of
the RISMC methods and tools that can best be addressed by this targeted approach to validation. Initial
validation focus will be on the RISMC flooding analysis computer software based upon Smoothed
Particle Hydrodynamics (SPH), NEUTRINO.
The NEUTRINO code is a SPH-based CFD software adopted as one of the RISMC modeling
tools for external hazards analysis. This document discusses the validation and development activities of
NEUTRINO, especially in relation to its simulation capability for flooding hazards analysis. In order to
draw meaningful conclusions from the discussion, we first analyzed the potential risks to nuclear power
plants in flooding scenarios (e.g., hazard modes, industry/regulatory concerns, etc.). Then, an initial high-
level PIRT was proposed to define the key phenomena relevant to the analysis of flooding hazards.
Finally, based on the framework of this PIRT analysis, the validation and development efforts that have
been conducted to date for NEUTRINO were discussed. This analysis helped to determine the sufficiency,
efficiency, and adequacy of the current code development and validation efforts for NEUTRINO.
iv
PREFACE
Document Version
This document is released as Revision 0.
It is the reader's responsibility to ensure he/she has the latest version of this document. Direct
Questions may be directed to the owner of the document and project manager:
Project Manager: Ronaldo H Szilard, RISMC Pathway Lead
Idaho National Laboratory
Phone: (208) 526-8376.
E-mail: [email protected] .

v
vi
CONTENTS
1. INTRODUCTION ..................................................................................................................... 1
1.1 Background ................................................................................................................................... 1
1.2 RISMC Methodology .................................................................................................................... 3
1.3 Project Scope and Objective ......................................................................................................... 4
1.4 Collaboration with Other Projects ................................................................................................. 5
2. NEUTRINO AND SMOOTHED PARTICLE HYDRODYNAMICS (SPH) .......................... 5
2.1 Overview ....................................................................................................................................... 5
2.2 General Theory of SPH ................................................................................................................. 5
2.3 NEUTRINO [11] .......................................................................................................................... 8
3. FLOODING EVENT INVESTIGATION ............................................................................... 10
3.1 Characterization of Flooding Phenomena ................................................................................... 10
3.2 High-Level PIRT for Flooding Scenario .................................................................................... 11
4. VALIDATION AND DEVELOPMENT ACTIVITIES FOR NEUTRINO ........................... 15
4.1 Code Validation and Development Activities ............................................................................. 15
4.2 Experimental Activities............................................................................................................... 19
5. SUMMARY AND CONCLUSIONS ...................................................................................... 21
REFERENCE .............................................................................................................................................. 22

vii
FIGURES
Figure 1. Software modules used to perform RISMC-specific analysis (as of 2017) ............................... 4
Figure 2. Standard process of PIRT proposed by Boyack and Wilson [19] ........................................... 13
Figure 3. Phenomena decomposition and possible models needed for flood and high-wind events
analysis with respect to the use of SPH approach [14]............................................................ 14
TABLES
Table 1. Characterization of three different types of external hazards relevant to NPP safety ............... 11
Table 2. Initial high-level PIRT proposed for application of NEUTRINO to flooding events ............... 14
Table 3. Validation activities of NETRINO in relation to flooding hazards .......................................... 18
Table 4. Summary of EHEG partners and capabilities [22, 29] .............................................................. 20

viii
ACRONYMS
CFD Computational Fluid Dynamics
CSAU Code Scaling, Applicability, and Uncertainty
DOE Department of Energy
LWRS Light Water Reactor Sustainability
NPP Nuclear Power Plant
NRC Nuclear Regulatory Commission
PRA Probability Risk Assessment
RIMM Risk Informed Margin Management
RISMC Risk Informed Safety Margin Characterization
SPH Smoothed Particle Hydrodynamics
SPRA Seismic Probabilistic Risk Assessment
SSC System, Structure, and Component
ix
1
Validation and Development Status of the NEUTRINO
for Flooding Hazard Analysis
1. INTRODUCTION
1.1 Background
The Fukushima accident of Nuclear Power Plants (NPP) in Japan occurred as a result of the
combination of a major seismic event and subsequent tsunami. After this event, US NRC conducted a
thorough review on the accident and its regulation processes to determine if the regulatory system
requires additional improvements. The activity was specifically made by a task force called the ‘near-term
task force’; the recommendations based on its activity were summarized in the report SECY-11-0137 [1].
The report implies that although the current NPP design bases requirements related to flooding and
seismic hazards are primarily determined deterministically, NRC may require insights beyond that. This
naturally increases the need of improved methods and tools for the nuclear industry to pursue license.
The traditional methods and approaches used for NRC regulation were entirely deterministic and
focused on engineering margin assessment. In this approach, the plant structures, systems, and
components (SSCs) are required to be designed to satisfy acceptance criteria such that a minimum level of
margin can be achieved over some specific design load of interest. NRC specifies many of the methods
and models to be used for such analyses to ensure the conservativeness of the results supporting its
regulatory decision. This conservative approach, however, has long been criticized within community
because it ignores the “realistic” risk significance of plant SSCs and other various risk factors (e.g.,
operator action, redundancy) that can substantially influence the event scenario and consequence. Also,
the large databases of experimental, analytical research and experience of reactor operation indicated that
such conservative approach was somewhat misdirected and sometimes led to non-conservative results [2].
This has motivated the development of more advanced safety analysis strategy that reflects the
“realistic” risk-based perspective. Specifically, in US since the early 1990s the probabilistic and risk-
informed safety analysis methods have been introduced to the NPP licensing process (e.g., CSAU, PRA).
As a result, the NRC regulatory framework currently incorporates both deterministic and probabilistic
perspectives for a range of different applications (i.e., accident analysis). This NRC regulation applies
also to the natural hazards such as external flooding event which is the main concern of the present work.
The benefits of applying the risk-informed approach in NPP licensing can be summarized as follows [3]:
(i) the risk-informed approach can provide a technical basis for understanding the “realistic”
hazards to NPP while reducing the unnecessary conservatism (i.e., realistic safety risks, probabilities of
occurrence and consequences of the full spectrum of potential accidents and/or operational transients)
(ii) technical basis can be established for managing the NPP hazards in advance,

2
(iii) it makes it possible to estimate economic risks of any safety decision,
(vi) optimum balance between the cost and plant safety can be pursued.
Despite the above benefits, however, the NPP PRAs (Probabilistic Risk Assessments) or risk-
informed regulations of NRC have focused primarily on internal events. The NPP PRAs of external
hazards (e.g., earthquake, flood, and high wind) has relatively been much less studied. In general,
evaluating the plant responses to the external hazards is very difficult because of the phenomenological
complexity involved with multi-scales and multi-physics. This means that it is hard to achieve reliable
risk insights from those analyses and large uncertainties exist for the analysis results. As a result, the NPP
design bases requirements related to external hazards rely heavily on deterministic approach until recently.
Nonetheless, the recent advancement of computer technology/resources, numerical methods, and physical
knowledge accumulated over the past decades provides high potential for the improvement of PRA results
applied to external events. It is noted that the tools and methods that have been used to conduct external
event PRAs have largely remained static in spite of the fact that the US regulatory framework has
continuously evolved over time. This implies that there is still much room to improve the quality of PRA
(e.g., reliable assessment of facility risk, plant SSCs that are more risk-significant) by developing the new
set of tools and methods that can reflect the modern development in science and technology.
The Risk-Informed Safety Margin Characterization (RISMC) R&D Pathway aims to develop and
demonstrate an advanced risk assessment method that is coupled to advanced safety margin quantification.
Within this new analysis framework, the physics models (i.e., RISMC tools) provide advanced
representation of NPP accident scenarios, state of plant SSCs, and safety margin quantification, and the
results affect the probabilistic risk assessment. This research is driven on the needs of nuclear industry.
The end goal of RISMC R&D Pathway is to provide advanced Risk Informed Margin Management
(RIMM) approach that can support the NPP decision makers’ decisions for relevant and realistic industry
applications. For reliable risk insight (via probabilistic model or PRA) as well as advanced safety margin
quantification (via physics model), a set of new tools and methods is being developed while their
capabilities are demonstrated through validation activities. In particular, for the industry application # 2
(i.e., multiple external hazards) that is of current interest, the research has been conducted to represent
more meaningful external event scenarios and consequences by applying an advanced tools that will [3, 4]:
• Identify, model and analyze the appropriate physics that needs to be included to determine plant
vulnerabilities related to external events.
• Manage the communication and interactions between different physics modeling and analysis
technologies.
• Provide the computational infrastructure for plant representation, scenario depiction, and
physics prediction.
3
1.2 RISMC Methodology
As discussed, the goal of RISMC R&D Pathway is to support plant decisions using the advanced
risk-informed margins management strategy with the aim to improve economics, reliability, and sustain
safety of current NPPs [5]. The RISMC approach can optimize plant safety and performance via a novel
interaction between probabilistic risk simulation and mechanistic codes for plant-level physics. The new
functionality allows the risk simulation module to serve as a “scenario generator” that feeds information
to the mechanistic codes. The effort fits with the goals of the RISMC Pathway, which are twofold [5]:
1. Develop and demonstrate a risk-assessment method coupled to (physics-based) safety
margin analysis. The method can be used by NPP decision-makers as part of their
margin management strategies.
2. Create an advanced RISMC Toolkit. The RISMC Toolkit enables a more accurate
representation of a NPP safety margins and its associated influence on operations and
economics.
When evaluating the safety margin, what we want to understand is not just the frequency of an
event like core damage, but how close we are (or not) to key safety-related events and how might we
increase our safety margin through proper application of Risk Informed Margin Management (RIMM). In
general terms, a “margin” is usually characterized in one of two ways:
• A deterministic margin, typically defined by the ratio (or, alternatively, the difference) of a
capacity (i.e., strength) over the load
• A probabilistic margin, defined by the probability that the load exceeds the capacity
A probabilistic safety margin is a numerical value quantifying the probability that a safety metric
(e.g., for an important process observable such as clad temperature) will be exceeded under accident
scenario conditions.
The RISMC Pathway uses the probabilistic margin approach to quantify impacts to reliability and
safety. As part of the quantification, we use both probabilistic (via risk simulation) and mechanistic (via
physics models) approaches. Safety margin and uncertainty quantification rely on plant physics (e.g.,
thermal-hydraulics and reactor kinetics) coupled with probabilistic risk simulation. The coupling takes
place through the interchange of physical parameters (e.g., pressures and temperatures) and operational or
accident scenarios.
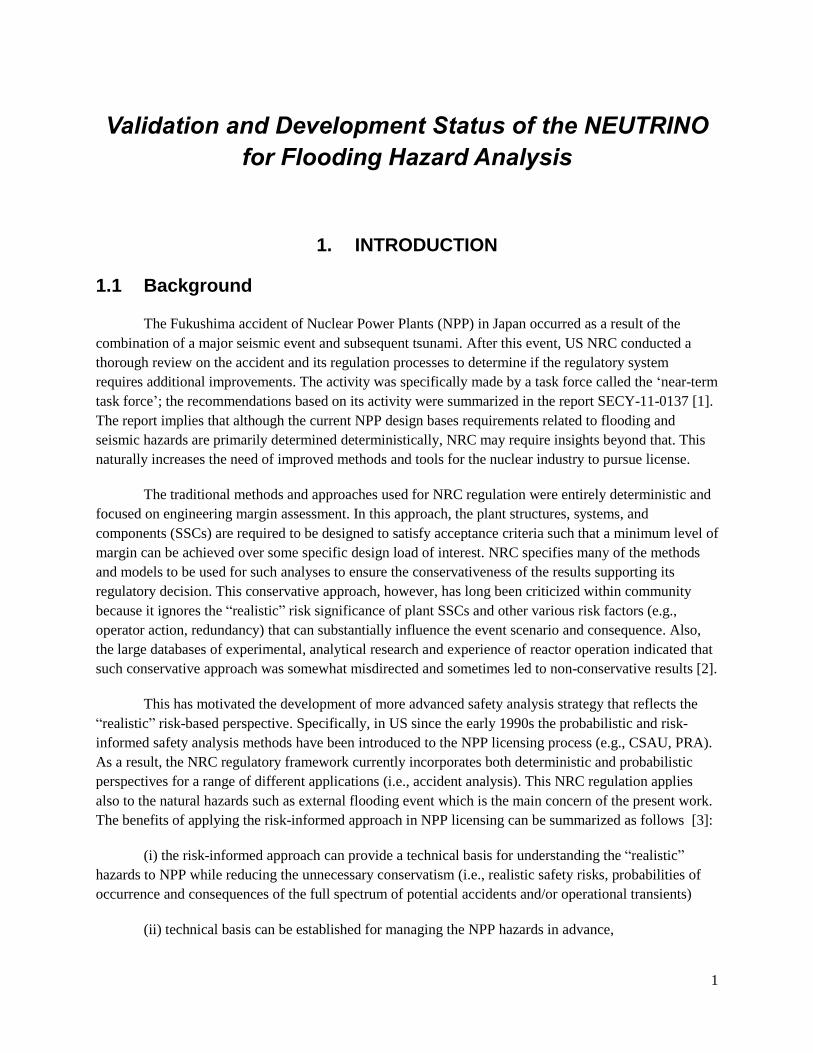
The pathway R&D is mostly studied by computer software simulation and development, under
the availability of advanced mechanistic and probabilistic simulation tools. Current RISMC toolkits to
model plan behavior and determining safety margins are shown in Figure 1.
4
Figure 1. Software modules used to perform RISMC-specific analysis (as of 2017)
1.3 Project Scope and Objective
This report concerns the development and validation activities of NEUTRINO, SPH-based CFD
software adopted as one of the RISMC toolkit for flooding hazard analysis. As part of the RISMC
pathway, some researches were already performed to investigate the general capability of SPH method for
the external hazards analysis [4, 6]. This early demonstration process revealed that the SPH method is
generally applicable to the analysis of various types of multi-hazard events that have been considered in
the Industry Application #2 (i.e., multiple external hazards). In the RISMC context, the predictive
capability of physics-based simulation code is crucial because the failure of plant SSCs predicted by the
code simulations contributes to the PRA analysis as well as the safety margin characterization.
The present work aims to discuss the development and validation status/efforts of NEUTRINO.
We discuss the NEUTRINO’s development status, ongoing validation activities, and current simulation
capabilities. Additionally, the experimental effort within RISMC Pathway to provide high-fidelity
validation data for NEUTRINO is described. Finally, to identify the true needs of further validation and
development for NEUTRINO, efforts are made to propose the initial high-level PIRT which provides key
information needed to analyze the flooding hazards.

5
1.4 Collaboration with Other Projects
The work has been closely coordinated with the Nuclear Energy University Program’s Integrated
Research Project (IRP) on “Development and Application of a Data-Driven Methodology for Validation
of Risk-Informed Safety Margin Characterization Models” by North Carolina State University (IRP-16-
10918). The goal of the IRP program is to develop and demonstrate a data-driven methodology for
validation of advanced computer models used in nuclear power plant safety analysis. Specifically, the
advanced computer models are those in the toolkit developed to support risk-informed safety margin
characterization (RISMC), an integrated deterministic/probabilistic safety analysis methodology
developed in the Department of Energy’s Light Water Reactor Sustainability (LWRS) program.
2. NEUTRINO AND SMOOTHED PARTICLE HYDRODYNAMICS (SPH)
2.1 Overview
NEUTRINO is CFD software adopted as one of the RISMC tools for physics-based numerical
analysis of NPP external hazards (e.g., flood, high-wind, and seismic events). To mimic the dynamics of
continuum fluids, NEUTRINO employs a mesh-free particle-based (Lagrangian) computational method
called Smoothed Particle Hydrodynamics (SPH). This section introduces briefly the general theory of
SPH and discusses the main features of NUETRINO employing the SPH method.
2.2 General Theory of SPH
Smoothed Particle Hydrodynamics (SPH) is mesh-free particle-based (Lagrangian) computational
method for solving the equations of hydrodynamics. The mathematical formulation was originally derived
by Lucy [7] and Gingold and Monaghan [8]. The SPH algorithms are currently used in a wide area of
disciplines in research, including astrophysics, geophysics and engineering. In SPH, the flow properties
are evaluated by approximating the flow quantities (e.g., density) at sampled positions from a set of
known quantities of the neighboring particles. In the following, the fundamental concept and
mathematical formulation of SPH is introduced which is based primarily on the discussion from D. Price
[9]. It is noted that this section summarizes only the key concept of the SPH method and thus, readers are
advised to refer to the reference [6] for more details.
- Fluid density estimate in SPH
First and foremost, to understand the fundamentals of SPH it is important to understand how the
density of a fluid is evaluated over the computation domain. In SPH, the fluid density is computed based
on an arbitrary distribution of point mass particles (note that in SPH context the Lagrangian particles have
mass, volume, pressure, density, etc.). Specifically, the density at a given position is estimated via a

6
weighted sum over the neighboring particles. The values of weight decrease with distance from a
sampling point (i.e., center of sampling volume) according to a scale parameter (that is, the density
estimate is “smoothed”). In a mathematical form, the density estimate can be expressed as
N
b
bb hrrWmr1
),()( (1)
where mb denotes the mass of individual particles, W is the weight function [1/m3], h is the scale
parameter (or smoothing length) that determines the fall-off rate of W as a function of the particle spacing,
and N is the total number of particles within a sampling volume. It is noted that by mass conservation
N
b
bmdV1
should be satisfied, implying that in Eq. (1) W is normalized as 1'),(
V
b dVhrrW .
Thus, the accuracy of density estimated by Eq. (1) depends essentially on the choice of weight
function W which is also referred to as ‘smoothing kernel’. To ensure the reliable performance of SPH
simulation, W is required to have several properties to be good smoothing kernel [9]:
(i) positive and smooth (to be differentiable), and decreases monotonically with relative distance
(note that W tends to approach delta function as h→0);
(ii) symmetric with respect to )(
brr , i.e., ),(),( hrrWhrrW bb
;
(iii) central-flatted shape (i.e., Bell-shaped) to keep the density estimate from being excessively
sensitive to a small change in the position of a nearby neighbor.
Considering (i)‒(iii), Gaussian distribution shape is a natural choice for the smoothing kernel (W)
as it satisfies all the above properties well:
])(
exp[),(2
2
h
rr
hhrrW b
db
(2)
where d is the number of spatial dimensions and σ is normalization constants that are given by [1/π0.5
, 1/π,
1/π1.5
] in [1, 2, 3] dimensions, respectively.
Eq. (2) is ideal in terms of providing a good density estimate, but is not practically feasible
because it requires considering all of the particles in the domain including those that are located very far.
Considering that the neighboring particles’ contribution quickly decreases with distance, the better choice
would be to employ a function that is Gaussian-like in shape but truncated at both ends at a finite radius.
It is noted that such function (smoothing kernel W) enables a more efficient estimate of fluid density, but
the density estimate becomes more sensitive to the local distribution of neighboring particles. One of the
most widely adopted smoothing kernel in this context is Schoenberg (1946) B-spine function. The Eq. (3)
below shows an example of the simplest B-spline function that can be used for SPH simulation (this is
also employed by NEUTRINO), i.e., a cubic spline truncated at 2h [9]:

7
2,0
21,)2(4
1
10,)1()2(4
1
)( 3
33
q
qqq
qw (3)
where ),()( hrrWhqw bd
, d is the number of spatial dimensions, hrrq b /
, and σ is
normalization constants given by [2/3, 10/(7π), 1/ π] in [1, 2, 3] dimensions, respectively.
- Estimate of smoothing length (h)
Another key concept that characterizes the SPH algorithm and has significant impact on the
simulation results is the smoothing length (h) [see Eq. (1)‒(3)]. Given particle distribution in the domain,
resolving both clustered and sparse particle regions as fairly as possible is desirable. This implies that we
can determine the smoothing length (at least roughly) by associating the smoothing length h with the
mean local particle spacing or local particle density [i.e., drnrh
)]([)( (where n denotes the local
number density of particles and d is the number of spatial dimensions)]. In this way, the smoothing length
h will become shorter in clustered particle regions, while the h will become longer in sparse particle
regions. Therefore, with the equal mass of individual particles in the SPH context, the smoothing length
can be considered inversely proportional to the density. This leads to the idea that the density ρ and
smoothing length h are mutually dependent as follows:
b
ababa rhrrWmr )](,[)( ; d
a
aa
mrh
)()(
(4)
where η is a parameter introduced to estimate the smoothing length corresponding to the units of the mean
particle spacing (ma/ρa)-d
; )(
ar indicates the density estimated at particle location a.
Eq. (4) is used in most modern SPH codes, where the equations for ρ and h are solved
simultaneously using so-called root-finding algorithms (e.g., Newton-Raphson or Bisection method).
Also, coupling the two equations in Eq. (4) plays a role in keeping the constant mass inside the smoothing
sphere [9, 10]:
aK
V
atot RdVM
a
3,
3
4 (5)
where Mtot,a is the total mass at particle location a and RK is the kernel radius [for example, 2h for the
cubic spline, as shown in Eq. (3)].

8
- Equations of fluid motion and energy
As discussed in [9], in the context of solving the “fully conservative” SPH algorithm, freedom is
only allowed while deriving the formulation for density estimate. This means that the rest of the SPH
algorithm, such as the equations for fluid motion and energy, can be derived based on that formulation.
The detailed derivation is well described in [9], beginning with the introduction of the discrete Lagrangian.
The ultimate form of the SPH formulations, i.e., the governing equations for mass, momentum,
and energy, is given as follows:
∙ Mass conservation:
b
ababa hrrWm ],[ ; )(hh (6)
∙ Momentum conservation:
b
baba
bb
baaba
aa
ab
a hWP
hWP
mdt
ud)]()([
22 (7)
∙ Energy conservation (no dissipation):
b
babaa
bb
baabab
aa
ab
a hWuP
hWuP
mdt
de)]()([
22 (8)
(where e is the total specific energy (=0.5u2+I, where I is the internal energy), u is the velocity, P is the
pressure, ])(
1[
b a
aabb
a
aa
h
hWm
h
, ),()( abaaab hrrWhW
, and the subscripts refer to the
particle location, e.g., )(
aa r , )(
aa rhh .).
In the practical application of SPH method, there are several important subjects that are not
discussed in this section but need special attention, such as artificial compressibility, artificial viscosity,
particle searching algorithm, and boundary handling method. Some of these are discussed in relation to
the validation results of NEUTRINO in Section 4.
2.3 NEUTRINO [11]
NEUTRINO is a SPH-based CFD software developed by Centroid Lab. The code was originally
developed for dealing with astrophysical, compressible fluid flows, and later, the application domain was
extended to a wide variety of problems such as non-Newtonian fluids, granular flows, and solid
deformation and fracture. The NEUTRINO is optimized for high performance computing with parallel
nodes and has advanced graphical user-interface. The Implicit Incompressible SPH solver (IISPH) is used
as base fluid solver. The IISPH computes pressure implicitly by solving a pressure Poisson equation via
iteration until it meets the incompressibility criterion.

9
In the following, the numerical algorithm employed in NEUTRINO is briefly explained.
The fluid density is solved in NEUTRINO based on semi-implicit (discretized) form of continuity
equation as follows:
uDt
D
(9)
)()()()(
tWttumt
tttabab
b
baa
(10)
It is noted that the density estimate by Eq. (10) is somewhat different from the traditional SPH
density approximation shown in Eq. (1). Specifically, the SPH approximation is applied to velocity
divergence part in Eq. (10) based on the continuity equation [Eq. (9)], instead of directly applying the
SPH approximation to the density estimate. This is because the traditional approach can cause a density
decrease near the fluids interface where the support regions are not well covered by particles. Another
important thing to note is that despite the solver name of IISPH (incompressible flow solver),
NEUTRINO does not strictly enforce the incompressibility criterion while resolving the density [this is
why the velocity divergence term still remains in Eq. (9)]. In other words, the weakly compressible
formula is applied and it leads to so-called artificial compressibility. This is to avoid extra computational
cost required to keep the density to be constant during the simulation.
Let us now explain how the density and pressure is estimated in NEUTRINO. In Eq. (10), the
unknown velocity )( ttu ab
is coupled with unknown pressure; therefore, )( ttu ab
is initially
predicted using known non-pressure forces such as gravity, surface tension and viscosity [see Eq. (11)
below]. Then, this velocity is used in Eq. (10) to determine the density )( tta .
b
aaab
m
F
t
tuttu
)()( (11)
The pressure force Fp and pressure p can be estimated based on the following relations:
)()())()(
( 02 tttW
m
tF
m
tFmt aab
b
pb
a
pa
b
b
(12)
)())(
)(
)(
)(()(
22tW
t
tp
t
tpmmtF ab
b
b
a
a
b
bap
a
(13)

10
)(0 ttbpa aa
b
bab (14)
where ρ0 is the reference density.
The unknown velocity )( ttu ab
can be estimated using Eq. (15) below, once the pressure (p)
is calculated for each particle (denoted by subscripts a,b):
ap
aaba mttFttuttu /)()()( (15)
Then, Eq. (15) is used to update the position of each particle.
As for the time integration, two different numerical schemes are available in NEUTRINO, (i)
Euler-Cromer integration and (ii) Verlet integration.
For other details of the algorithms employed in NEUTRINO (e.g., artificial viscosity, boundary
handling, fluid-structure interaction solver), the readers are advised to refer to the code manual [11].
3. FLOODING EVENT INVESTIGATION
3.1 Characterization of Flooding Phenomena
The main purpose of this report is to assess the validation and development status of NEUTRINO,
with a particular focus on the NEUTRINO’s simulation capability for flooding hazards analysis. This
activity aims eventually to understand the current technical basis for the flooding analysis and provide
guidance for where there is a need for establishing additional database and/or code (NEUTRINO)
capability. For this purpose, the general scope of code validation should first be identified. This requires
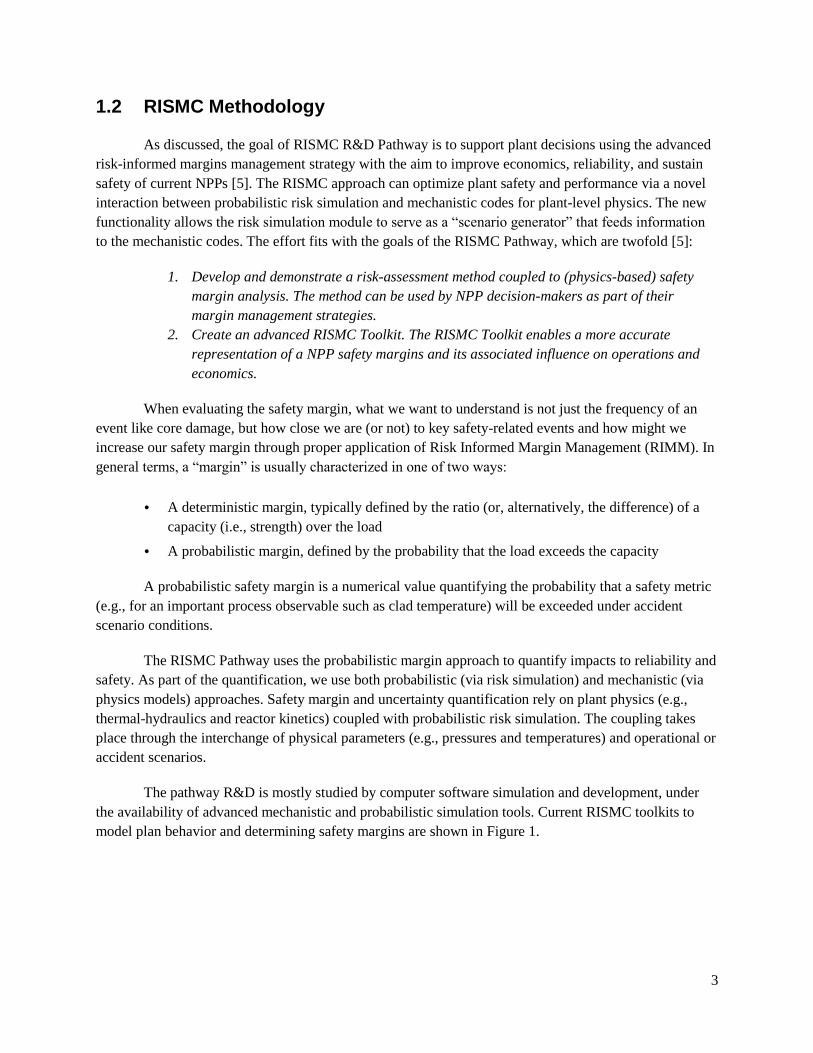
fundamental understanding of the phenomenon, i.e., flooding. In Table 1, three different types of external
hazards to NPP safety are characterized. Table 1 characterizes the potential (external) hazard based on (i)
types of hazard source, (ii) hazard mode, (iii) associated physics, (iv) regulatory/industry concerns, and (v)
potentially impacted SSCs near/on a NPP site. This helps to understand the fundamental features of the
phenomena associated with each hazard and potential risk elements to NPP. Based on this understanding,
the initial high-level PIRT applicable to the analysis of flooding hazards is established in the next section.
11
Table 1. Characterization of three different types of external hazards relevant to NPP safety
Flooding Seismic High-Wind
Source type River, sea, rain Tectonic, volcanic,
explosion
Straight-line wind,
tornado, tropical storm
Primary hazard mode
Water rising, spray
event, wave impact,
debris impact
Ground motion (considering both ground
displacement and duration)
Wind field dynamics,
wind-generated missiles
Primary cause of
SSCs failure
Water contact, pressure,
debris impact
Wave-induced
dislocation, soil-
structure interaction
Pressure, debris impact
Regulatory / industry
concerns
• Internal flooding
(accompanied by pipe rupture)
• Stream & river overtopping
• Dam failure
• Storm surge
• Heavy rainfall (local intense
precipitation)
• Wave (tsunami, seiche)
• Ice dam
SSCs failure related to soil-
structure interaction (e.g.,
piping system failure, failure
of adjacent dam / levee / dike),
seismic-induced fire and flood
(secondary impacts)
Direct impact on critical
plant SSCs, potential
impact of failures of
non-safety-related SSCs
on critical plant SSCs
Potentially affected
SSCs near and on
NPP site
Circuit breaker panels,
computers, control room
panels, valves, pumps,
generators, offsite power
circuits, etc.
Transmission poles,
towers, and lines, site-
access road,
communication systems,
pump, etc.
Transmission poles /
tower, offsite power
circuits, communication
systems, site-access
road, fire protection
system, security systems,
warehouse, etc.
References NRC Generic Letter (GL) 88-20, Supplement 4 (IPEEE program) [12], Miller et
al. [13], NRC webpage [14], S. Hess et al. [15], NRC documents [16-18]
3.2 High-Level PIRT for Flooding Scenario
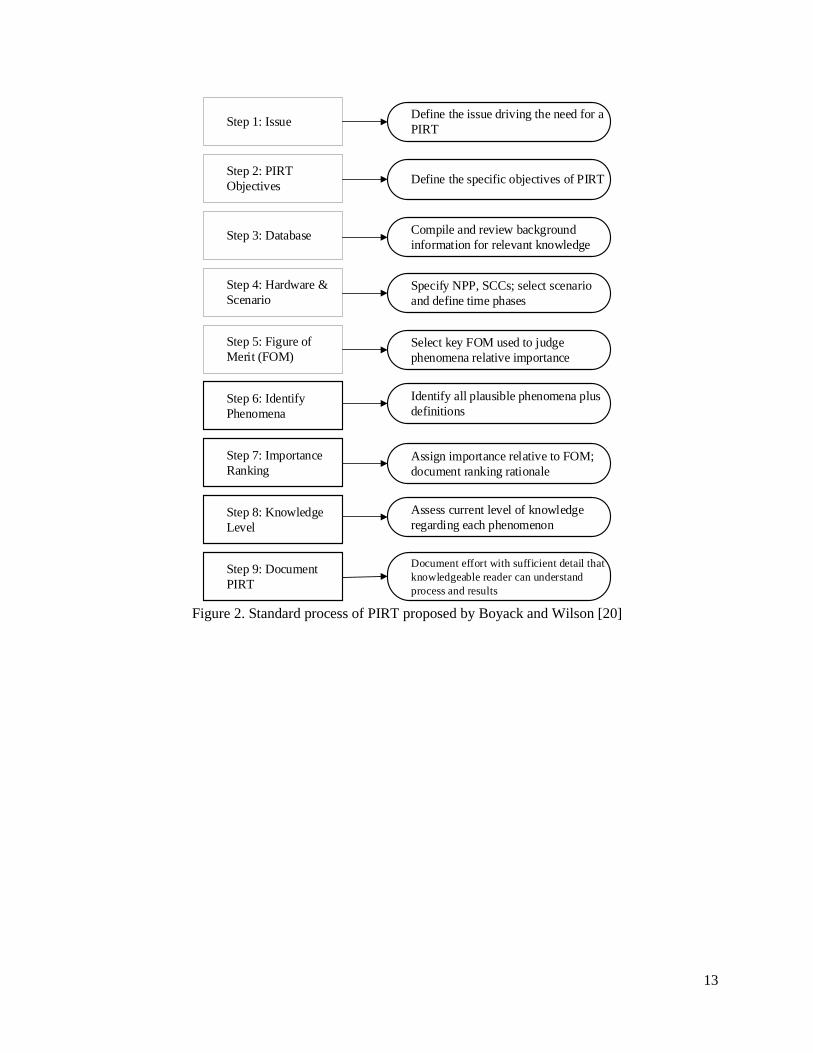
The PIRT (Phenomena Identification and Ranking Technique) is a method to systematically
gather information from experts on a specific issue (e.g., NPP accident) and rank the importance of the
information [19]. The ultimate goal is to support decision-making such as determining which information
should have high priority for research on that subject. The PIRT was first developed in the late 1980s and
has been successfully applied in nuclear technology such as nuclear reactor safety analysis [2]. This is
also an essential sub-process for BEPU (Best Estimate Plus Uncertainty) analysis such as CSAU (Code
Scaling, Applicability, and Uncertainty), the BEPU methodology acknowledged by the NRC. From a
perspective of BEPU analysis, the importance of PIRT comes from the fact that the information obtained
from the PIRT (i.e., relative importance of phenomena) is used to determine the code uncertainty input
parameters and their realistic boundaries. In general, experts determine the relative importance of
phenomena by taking into account their influence on the relevant plant safety metrics (e.g., peak cladding
temperature). The standard PIRT process is detailed in Figure 2.

12
For the safety analysis of NPP, the PIRT process allows us to identify and prioritize the
phenomena relevant to the specific NPP accidents so that we can properly analyze them. This process can
therefore be useful to determine the overall validation scope of the flooding hazards analysis before we
assess the validation and development activities of NEUTRINO. In the present work, as an initial step, the
‘high-level PIRT’ is proposed for the flooding hazard analysis. In establishing the high-level PIRT,
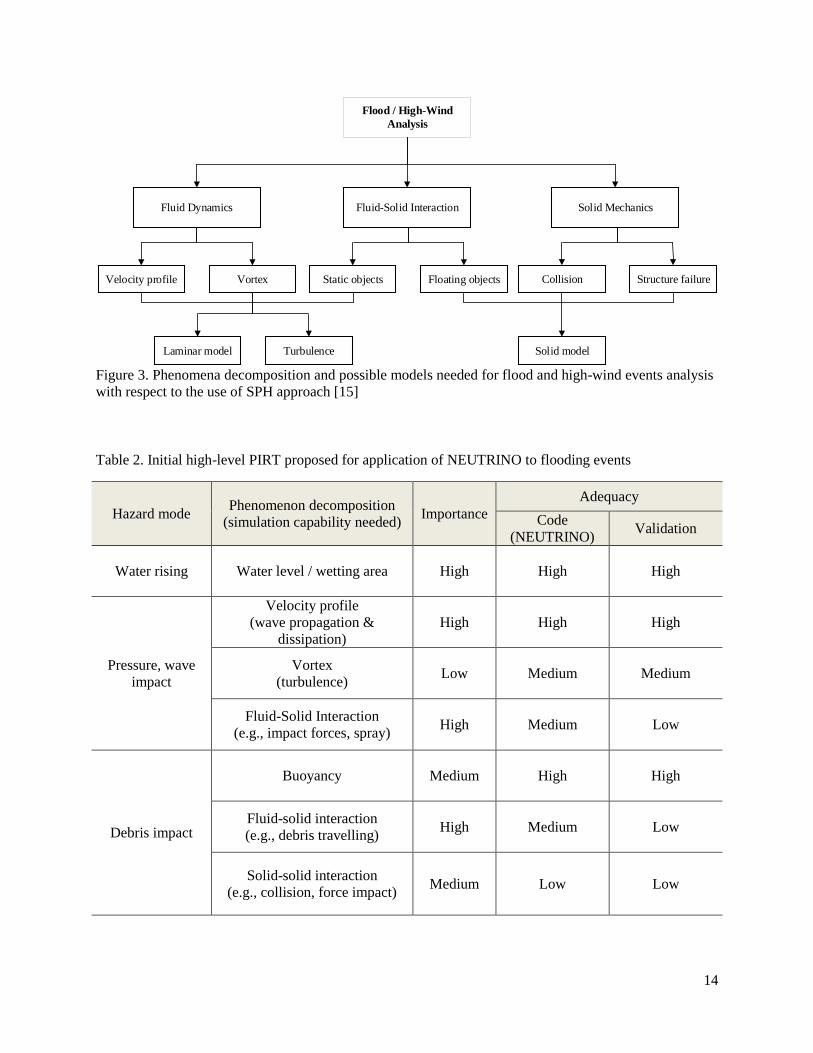
instead of strictly following the process shown in Figure 2, the characteristics of flooding hazards were
first classified based on the specific hazard modes and associated physics. This is a process similar to that
discussed in ref. [15] which proposed an initial high-level PIRT for high-wind events (see Figure 3). It is
noted that the phenomena decomposition used for the analysis of high-wind events [15], shown in Figure
3, can also be applied for the flooding phenomena decomposition, although the properties of fluids (i.e.,
wind vs. water) and thus potential risk elements to the NPPs are somewhat different.
Table 2 shows the initial high-level PIRT for the application of NEUTRINO to the flooding
hazards analysis. In this table, the flooding-related phenomena are first characterized based on the hazard
modes. Then, the phenomena are further decomposed according to the associated underlying physics.
Finally, the degree of ‘Importance’ and ‘Adequacy’ are given for each decomposed phenomenon using
three-level scale. The ‘high’ importance indicates that the phenomenon has a controlling impact on the
consequence of the flooding events. Therefore, the high degree of simulation (or modeling) accuracy as
well as the intensive validation effort is required for such phenomena. In Table 2, the ‘adequacy’ is
evaluated in two aspects: the code (NEUTRINO) adequacy and validation adequacy. The code adequacy
explains how adequate it is to represent the associated physics using NEUTRINO, given the current code
development status. The validation adequacy is determined based on the validation efforts required; the
‘high’ validation adequacy means that the validation effort is mature enough, thus there is no much need
for additional experimental and/or high-fidelity numerical data. This high-level PIRT will help to ensure
the sufficiency and efficiency of the current code development and validation efforts.
13
Step 1: Issue
Step 2: PIRT
Objectives
Step 3: Database
Step 4: Hardware &
Scenario
Step 5: Figure of
Merit (FOM)
Define the issue driving the need for a
PIRT
Define the specific objectives of PIRT
Compile and review background
information for relevant knowledge
Specify NPP, SCCs; select scenario
and define time phases
Step 6: Identify
Phenomena
Step 7: Importance
Ranking
Step 8: Knowledge
Level
Step 9: Document
PIRT
Select key FOM used to judge
phenomena relative importance
Identify all plausible phenomena plus
definitions
Assign importance relative to FOM;
document ranking rationale
Assess current level of knowledge
regarding each phenomenon
Document effort with sufficient detail that
knowledgeable reader can understand
process and results
Figure 2. Standard process of PIRT proposed by Boyack and Wilson [20]
14
Flood / High-Wind
Analysis
Fluid Dynamics Fluid-Solid Interaction Solid Mechanics
Velocity profile Vortex Static objects Floating objects Collision Structure failure
Laminar model Turbulence Solid model
Figure 3. Phenomena decomposition and possible models needed for flood and high-wind events analysis
with respect to the use of SPH approach [15]
Table 2. Initial high-level PIRT proposed for application of NEUTRINO to flooding events
Hazard mode Phenomenon decomposition
(simulation capability needed) Importance
Adequacy
Code
(NEUTRINO) Validation
Water rising Water level / wetting area High High High
Pressure, wave
impact
Velocity profile
(wave propagation &
dissipation)
High High High
Vortex
(turbulence) Low Medium Medium
Fluid-Solid Interaction
(e.g., impact forces, spray) High Medium Low
Debris impact
Buoyancy Medium High High
Fluid-solid interaction
(e.g., debris travelling) High Medium Low
Solid-solid interaction
(e.g., collision, force impact) Medium Low Low

15
4. VALIDATION AND DEVELOPMENT ACTIVITIES FOR NEUTRINO
4.1 Code Validation and Development Activities
This section describes the recent activities of validation and development for NEUTRINO. In
Table 3, the associated activities are summarized based on the initial high-level PIRT proposed in Table 2.
The present work focuses particularly on the validation efforts to demonstrate the NEUTRINO’s
capability as a flooding analysis tool for RISMC. Also, the ongoing development activities to improve the
simulation capabilities are briefly explained. The discussion below is based on the activities described in
the references [11, 21-23]. Thus, readers are advised to refer to these references for more details about the
validation results.
In the following, the validation and development activities for NEUTRINO are summarized and
discussed based on the classification used in Table 2 (i.e., hazard mode and phenomena decomposition):
(i) Water level / wetting area
The rise of water level and wetting are the phenomena that are generally expected to take place in
flooding scenario. In the sense that the water level, area of wetting, and their time-dependent evolution
may have significant impact on the consequence and scenario of flooding events (e.g., failure of SSCs in
NPP), the demonstration of the simulation capability is important. In the validation test of the “collapse of
liquid column”, in which the water is initially confined in a rectangular container and subsequently
released, Lin [21] showed that SPH approach can successfully predict the decreasing level of water
observed by two different experiments [24, 25]. Also, in the “Solitary Wave Past Shore” problem [11],
the simulation results of NEUTRINO were shown to agree well with the experimental data for the wave
properties of flowing water, including the elevation of water surface and flow depth.
As part of relevant code development effort, a new feature of Height-Field Source is being
implemented in NEUTRINO, which will allow a new particle emitter node based on height.
(ii) Velocity profile
The NEUTRINO’s ability to predict the wave profile and dissipation was tested with three
different validation problems: (i) 2-D wave-packet propagation [22], (ii) sloshing tank [11, 22], and (iii)
lid-driven cavity flow [11, 21]. For the test cases of (i) and (ii), the velocity profile was generally well
reproduced, while some results revealed that the propagation of small amplitude waves was hard to
predict. The simulation results of wave dissipation (and high-frequency noises) depended highly on how
to calibrate the artificial viscosity. This requires more study (and improvement) via convergence test,
viscosity formulation, etc. Additionally, in the validation problem of lid-driven cavity flow (iii) [21] some
discrepancies were observed between the NEUTRINO and the fine-mesh FDM (Finite Difference Method)
solutions. This is due possibly to the artificial compressibility that results inherently from the weakly-
compressible formula of NEUTRINO (see Section 2.3). This issue also concerns the discussion in the

16
references [11, 21] that the issues of particle vacancy, which usually degrades the simulation accuracy of
NEUTRINO, may become severe as Reynolds number increases.
(iii) Vortex [11, 21]:
The predictive ability of NEUTRINO for the small-scale flow characteristic such as vortex was
simply discussed in the reference [21, 26]. For the simulation of a constant flow past a fixed solid body,
initial results of NEUTRINO seemed to predict well the characteristic flow patterns such as vortex
shedding. It is noted, however, that the simulation accuracy was significantly influenced by the particle
size being employed for the simulation; for instance, substantial loss of information was observed as the
particle size became larger.
To improve the NEUTRINO’s ability to represent the turbulence characteristic, efforts are being
made to implement the RANS-averaged model while the LES IISPH model was recently implemented.
However, in light of analyzing the flooding hazards that are expected to be dominated by large-scale flow
features, the importance of this task is considered relatively low (see Table 2).
(iv) Fluid-solid interaction (e.g., impact forces, spray)
One of the main concerns of flooding scenario is the impact of slamming water on the solid
structures. To demonstrate the simulation capability of the hydraulic forces acting on the solid bodies,
Dam break problems were simulated using NEUTRINO and the results were compared with two
experiments of Cummins et al. [27] and Aureli et al. [28], respectively. In comparison with the Cummins’
data, the magnitude of impact force was predicted accurately overall, while the impact timing was well
represented only at high resolution (specifically, less than 20 % error with particle size ≤0.02 m). In the
validation case with Aureli’s experiment where the impact forces were much less than those of Cummins’
experiment, NEUTRINO overestimated the impact forces by about 1N with high-frequency noise
compared to the experimental measurement. It is argued in [22] that this is likely related to the
overestimation of air entrapment and cushion effect.
Additionally, the falling droplets can influence the performance of various SSCs on/near a NPP
site (e.g., electronic device or equipment), thus such effect (i.e., water spray) may also need to be taken
into account as the future validation problems in this category.
As code development efforts, the integration of a new rigid body solver, Chrono, is underway to
improve the simulation capability of the fluid-solid interaction in NEUTRINO. The Chrono is known to
be better validated for various engineering applications, thus is expected to be able to replace or
complement the current rigid body solver Bullet Physics. Also, NEUTRINO is now be able to model the
terrain (e.g., ground or sea floor) using a new node Rigid Topography. Coupling with shallow water (SW)
model/finite element (ADCIRC) is another ongoing development effort for NEUTRINO.

17
(v) Buoyancy
Several tests were performed to demonstrate the NEUTRINO’s ability to represent the effect of
buoyancy. The tests were specifically conducted with a falling and a floating solid body (geometry:
sphere or cuboid) in static water [11] while applying the various density ratios between the fluid and solid
(ρsolid/ρfluid). Then, the time-dependent trajectories of the solid bodies computed by NEUTRINO were
compared with the analytic solution [22] and/or high-fidelity numerical solution [11]. The simply floating
or falling solid bodies seemed to be represented relatively well, but larger deviation was observed when
predicting the oscillating behavior. Also, there was a particular challenge when the solid-fluid density
ratio was close to 1 (specifically, ρsolid/ρfluid ≈0.9‒1.2) [22]. The drag force (friction) was another factor
that affected the simulation result. Finally, it is important to note that special cares must be taken for the
selection of boundary handling mode in NEUTRINO as it has significant impact on the simulation
accuracy of the buoyancy effect [22]. For example, single-layer boundary mode is not recommended for
the simulation of dynamic solids in fluid.
Currently, to further investigate the simulation issues related to buoyancy and drag force, the
“medicine ball sinking” problem is being studied with the University of Toulon [22].
(vi) Fluid-solid interaction (e.g., debris travelling)
The interaction between the flowing liquid and solids that may lead to “debris travelling” is the
main concern of this category. The buoyancy and drag forces are dominant factors that can affect the
associated hazard scenario and consequence due to the dynamic debris. In combination with the efforts to
investigate the buoyancy issues discussed above [i.e., (v)], studies are underway for the fluid pressure and
drag forces acting on the solids.
(vii) Solid-solid interaction (e.g., collision, force impact)
The impact of dynamic solids on the solid structures is the primary concern of this category. This
so-called solid-solid interaction is generally expected and may cause a wide range of damages to power
plants and buildings during the flooding scenario. Nonetheless, no direct validation effort has yet been
found in this category, thus more validation effort is required.

18
Table 3. Validation activities of NETRINO in relation to flooding hazards
Hazard mode Phenomenon decomposition
(simulation capability needed) Validation cases performed
Remarks (observed issues/difficulties,
ongoing activity)
Water rising Water level / wetting area Solitary wave past shore ∙ Height-field source
implementation (in progress)
Pressure,
wave impact
Velocity profile
(wave propagation &
dissipation)
Poisuelle flow,
2-D wave-packet propagation,
Sloshing tank [29],
Solitary wave past shore
∙ Difficult to reproduce small
amplitude waves.
∙ Need careful calibration of
artificial viscosity.
Vortex
(turbulence,
low Reynolds #)
Sloshing tank [29]
∙ LES IISPH model
(implemented)
∙ RANS model (in progress)
Fluid-solid interaction
(e.g., impact forces, spray) Dam break problems (comparing
with experimental data [27, 28])
∙ A new node for rigid
topography (implemented; for
ground or sea floor modeling).
∙ Validation (dam break):
Partially satisfactory in
predicting the impact force
magnitude and timing.
∙ Expected potential issue
(validation, dam break):
overestimation of air
entrapment, cushion effect.
∙ Currently integrating a new
rigid body solver (Chrono).
Debris impact
Buoyancy
Floating or falling solids in static
water (sphere and cuboid);
medicine ball sinking in water (in
progress); tested the performance
of single/double boundary layer
option.
∙ Challenging as ρsolid/ρfluid 1.
∙ Single boundary layer option
is not ideal for accuracy.
Fluid-solid interaction
(e.g., debris travelling)
∙ Investigating the buoyancy-
coupled issues (e.g., fluid
pressure and fluid friction
forces acting on a solid; impact
of individual forces).
∙ Significant deficiency of
single boundary layer mode for
representing dynamic solids.
∙ The code capability of vortex
prediction may be important in
the context of debris travelling.
Solid-solid interaction
(e.g., collision, force impact)
19
4.2 Experimental Activities
The high-quality experimental data is crucial in developing and validating the new (advanced)
analysis tools and methods for RISMC research. Thus, efforts are being made to support the production of
high-quality experimental data which are required to validate the RISMC tools, including NEUTRINO.
The support is specifically made through a multi-partner External Hazards Experimental Group (EHEG).
As the name implies, the EHEG supports the experimental activities related to the concerns of external
hazards (e.g., seismic and flooding events), and was coordinated by INL for RISMC pathway. The EHEG
consists of INL, other national laboratories, and universities to perform the necessary external hazard
experiments [30]. The organization and operation of EHEG is expected to help efficiently communicate
the technical expertise, experience, and testing data within the group. The databases developed by EHEG
will be stored and be made available for use within RISMC through the INL Seismic Research Group
website [https://seismic-esearch.inl.gov/SitePages/Home.aspx] [30].
Table 4 summarizes the focus area of research, expertise, and existing/developing research
capabilities of each partner in EHEG. This is based primarily on the information given in the reference
[30] (in Appendix A). Thus, readers are advised to refer to the reference for more details.
As part of specific effort to develop experimental data for flooding models validation, there is an
experimental activity being made in George Washington University (GWU). The primary goal of the
GWU experiment is to investigate the wave impact of water within a horizontal large rectangular tank.
The tank is designed to allow the oscillations of entire body so that the external force can excite the water
with better control than the traditional method of using wave paddle on one end of the tank. This facility
can also useful for studying the seismic effects on NPP facilities (e.g., spent fuel pool). The large size
(width) of tank allows the observation of 3D flows that may encounter in actual flooding scenario. Also,
the tank design which allows the long-term continuous operation (oscillation) is expected to help produce
the high-quality data with high statistical significance. Before specifying the design of experiment, the
GWU research team performed a variety of CFD study with NEUTRINO for tank size, water level, object,
forcing type (amplitude and frequency).
There is still large deficiency of experimental data that can be used for the development and
validation of flooding analysis tool such as NEUTRINO. In order to achieve a RISMC goal in a timely
and cost-effective manner, more strategic effort is required, as proposed in Table 3.

20
Table 4. Summary of EHEG partners and capabilities [23, 30]
No. EHEG Partner
Existing/future capabilities
Capability type
(Exp / MM*)
Research focus area & capabilities
1 INL
MM
[Seismic, flooding]
- Non-linear soil structure interaction (NLSSI) simulation
- SPRA (multi-hazard risk analysis) - Time-based stochastic analysis
- External hazard analysis at virtual NPP (future plan)
Exp [Seismic]
- Geotechnical centrifuge - Small scale structural dynamics lab (future plan)
2 University of Buffalo
MM
[Seismic]
- Experienced with analysis of seismic isolation components and systems; developed isolator unit elements for multiple NLSSI codes.
- SPRA (isolator and umbilical system analysis)
- Experienced with NLSSI simulation
Exp
[Seismic] - Two high-performance, 6 DOF shake tables
- Nonstructural Component Simulator (NCS)
- Large-scale geotechnical laminar box - Hybrid simulation systems
3 George Washington
University
MM Experienced with computer model benchmark and validation (including
NETRINO)
Exp
[Seismic, flooding]
- Diagnostics development for time-based analysis and code validation - Modal and tensile testers
- Dedicated high-bay space with strong floor
- Large, polyvalent, and transportable suite of advanced diagnostics proven on shake table
4 Purdue University
MM [Seismic]
- NLSSI simulation & analysis
Exp
[Seismic]
- Wykeham Farrance unsaturated dynamic hollow cylinder device for
testing hollow or solid specimens
- Automated triaxial testing (CKC) system for cyclic or monotonic loading test
- Automated MTS programmable load frame for stress- or strain-
controlled dynamic or monotonic testing - Small- and large-scale direct shear boxes, ring shear device and pull-out
box
- Hydraulic static and cyclic actuators with up to 1000 kip capacity
5 University of Illinois at
Urbana Champaign
MM [Seismic]
- NLSSI simulation & analysis; soil constitutive modeling for NLSSI
analysis
Exp
[Seismic] - Multi-directional simple shear device for soil testing
- Monotonic and cyclic triaxial soil testing device
- Resonant column soil testing device
6 North Carolina State
University MM
[Seismic, flooding]
- Multi-hazard PRA; Bayesian analysis
- Vulnerability assessment for plant SSCs with UQ - Fragility assessment of flood defense structures associated with
flooding and seismic loads
- Equipment qualification (e.g., electrical cabinets and control panels); characterization of uncertainty in mounting arrangement.
7 Idaho State University MM
[Flooding]
- SPH modeling for flood/tsunami
Exp [Flooding] Water flume and associated water storage/pumping
* Exp: experiment; MM: modeling and methods development
21
5. SUMMARY AND CONCLUSIONS
We discussed the validation and development activities of NEUTRINO, the SPH-based CFD
software adopted by the RISMC Pathway for flooding hazards analysis. The main concern is to
understand the NEUTRINO’s (current) ability to simulate the various types of flooding hazards and to
discuss the code validation, development, and validation data needs. At first, the potential risks of
flooding phenomena to NPP (e.g., hazard modes, industry/regulatory concerns, etc.) were analyzed and
characterized. Then, an initial high-level PIRT was proposed to define the relevant phenomena needed to
analyze the flooding hazards. Based on the framework of this PIRT analysis, the validation and
development efforts that have been conducted to date were discussed. This helped to determine the
sufficiency, efficiency, and adequacy of the current code development and validation efforts. It is hoped
that this work can help to establish the efficient future validation strategy for NEUTRINO.

22
REFERENCE
[1] U.N.R. Commission, Prioritization of Recommended Actions to be Taken in Response to Fukushima
Lessons Learned, Commission Paper SECY-11-0137, October, 3 (2011).
[2] G.E. Wilson, Historical insights in the development of Best Estimate Plus Uncertainty safety analysis,
Annals of Nuclear Energy, 52 (2013) 2-9.
[3] R. Szilard, J. Coleman, C. Smith, S. Prescott, A. Kammerer, R. Youngblood, C. Pope, Industry
Application External Hazard Analyses Problem Statement, in, INL/EXT-15-36101, Idaho National
Laboratory, 2015.
[4] C.L. Smith, S. Prescott, J. Coleman, E. Ryan, B. Bhandari, D. Sludern, C. Pope, R. Sampath, Progress
for the Industry Application External Hazard Analyses Early Demonstration, in, Idaho National
Laboratory (INL), Idaho Falls, ID (United States), 2015.
[5] C. Smith, C. Rabiti, R. Szilard, Risk-Informed Safety Margins Characterization (RISMC) Pathway
Technical Program Plan, in, Idaho National Laboratory (INL), Idaho Falls, ID (United States), 2017.
[6] J.L. Coleman, C. Bolisetti, S. Veeraraghavan, C. Parisi, S.R. Prescott, A. Gupta, Multi-hazard
advanced seismic probabilistic risk assessment tools and applications, in, Idaho National Laboratory
(INL), Idaho Falls, ID (United States), 2016.
[7] L.B. Lucy, A numerical approach to the testing of the fission hypothesis, The astronomical journal, 82
(1977) 1013-1024.
[8] R.A. Gingold, J.J. Monaghan, Smoothed particle hydrodynamics: theory and application to non-
spherical stars, Monthly notices of the royal astronomical society, 181 (1977) 375-389.
[9] D.J. Price, Smoothed particle hydrodynamics and magnetohydrodynamics, Journal of computational
physics, 231 (2012) 759-794.
[10] V. Springel, L. Hernquist, Cosmological smoothed particle hydrodynamics simulations: the entropy
equation, Monthly notices of the royal astronomical society, 333 (2002) 649-664.
[11] Neutrino-Dynamics, http://neutrinodynamics.com//documentation.html, in, 2014.
[12] NRC, Individual Plant Examination of External Events (IPEEE) for Severe Accident Vulnerabilities
- 10CFR 50.54(f) (Generic Letter No. 88-20, Supplement 4), in, Washington: United States Nuclear
Regulatory Commission, 1991.
[13] C. Miller, A. Cubbage, D. Dorman, J. Grobe, G. Holahan, N. Sanfilippo, Recommendations for
enhancing reactor safety in the 21st century: The Near-Term Task Force review of insights from the
Fukushima Dai-ichi accident, Nuclear Regulatory Commission, 2011.
[14] NRC, Flooding Sources and Protection, in, https://www.nrc.gov/reactors/operating/ops-
experience/japan-dashboard/flooding-sources.html, 2015.
[15] S. Hess, L. Lin, R. Sampath, S. Prescott, C. Smith, Smoothed-particle hydrodynamics based wind
representation, Idaho National Laboratory, (2016).
[16] NRC, Central and eastern United States seismic source characterization for nuclear facilities,
NUREG-2115, (2012).
[17] NRC, Perspectives Gained From the Individual Plant Examination of External Events (IPEEE)
Program, NUREG-1742, in, Washington: United States Nuclear Regulatory Commission, 2002.
[18] NRC, Prioritization of Recommended Actions to be Taken in Response to Fukushima Lessons
Learned, in, Washington: United States Nuclear Regulatory Commission, 2011.
[19] D.J. Diamond, Experience using Phenomena Identification and Ranking Technique (PIRT) for
nuclear analysis, in, Brookhaven National Laboratory, 2006.
[20] B.E. Boyack, G. Wilson, Lessons learned in obtaining efficient and sufficient applications of the
PIRT process, (2004).
[21] L. Lin, Assessment of the Smoothed Particle Hydrodynamics method for Nuclear Thermal-Hydraulic
Applications, (2016).
[22] R. Sampath, N. Montanari, L. Lin, NEUTRINO Development & Validation Status, in, Presented in
2017 IRP (Integrated Research Projects) Annual Meeting 2017.

23
[23] N. Dinh, A. Gupta, I. Bolotnov, J. Baugh, M. Avramova, A. Bui, H. Abdel-Khalik, X. Sun, P.
Bardet, J. Lane, R. Sewell, R. Sampath, S. Prescott, C. Rabiti, R. Youngblood, W. Ren, Development and
Application of a Data-Driven Methodology for Validation of Risk-Informed Safety Margin
Characterization Models (Report ID: M2NU-16-NC-NCSU-030301-152), in, 2018.
[24] S. Koshizuka, A particle method for incompressible viscous flow with fluid fragmentation, Comput.
Fluid Dyn. J., 4 (1995) 29-46.
[25] J. Martin, W. Moyce, A. Price, C. Thornhill, Part IV. An experimental study of the collapse of liquid
columns on a rigid horizontal plane, Phil. Trans. R. Soc. Lond. A, 244 (1952) 312-324.
[26] S. Prescott, D. Mandelli, R. Sampath, C. Smith, L. Lin, 3D simulation of External Flooding Events
for the RISMC Pathway, in, Idaho National Laboratory (INL), Idaho Falls, ID (United States), 2015.
[27] S. Cummins, T. Silvester, P.W. Cleary, Three‐dimensional wave impact on a rigid structure using
smoothed particle hydrodynamics, International journal for numerical methods in fluids, 68 (2012) 1471-
1496.
[28] F. Aureli, A. Maranzoni, P. Mignosa, C. Ziveri, Dam-break flows: acquisition of experimental data
through an imaging technique and 2D numerical modeling, Journal of Hydraulic Engineering, 134 (2008)
1089-1101.
[29] O.M. Faltinsen, O.F. Rognebakke, I.A. Lukovsky, A.N. Timokha, Multidimensional modal analysis
of nonlinear sloshing in a rectangular tank with finite water depth, Journal of Fluid Mechanics, 407
(2000) 201-234.
[30] J.L. Coleman, C.L. Smith, D. Burns, A. Kammerer, Development Plan for the External Hazards
Experimental Group, in, Report INL/EXT-16-38328, Revision 1, Idaho National Laboratory, Idaho Falls,
ID, 2016.