agentes y sistemas multi-agentes razonando sobre los ... · introducci on bdi ctl=ctl axiomas...
TRANSCRIPT
Introduccion BDICTL/CTL∗ Axiomas BDI Axiomas multimodales Eventos Compromiso
Agentes y Sistemas Multi-AgentesRazonando sobre los agentes: Logicas BDI
Dr. Alejandro Guerra-Hernandez
Departamento de Inteligencia ArtificialFacultad de Fısica e Inteligencia Artificial
Universidad [email protected]
http://www.uv.mx/aguerra
Maestrıa en Inteligencia Artificial 2011
Introduccion BDICTL/CTL∗ Axiomas BDI Axiomas multimodales Eventos Compromiso
Metodos Formales en Computacion
I Se usan para verificar que un programa sea correcto yfuncione conforme a nuestras expectativas.
I La especificacion de agentes ha seguido dos enfoques en estesentido:
I Lenguajes externos a los agentes. Meta lenguajes usados paraespecificar el diseno de los agentes y para verificar que ciertaspropiedades del comportamiento de los agentes se cumplan.Los agentes no ejecutan esa especificacion: las diferenteslogicas BDI [Cohen, 1990, Rao, 1991b, Rao, 1991].
I Lenguajes orientados a agentes. En este enfoque, el lenguajeempleado para especificar formalmente a los agentes y sucomportamiento, es a su vez, un lenguaje que el agentepuede ejecutar: AgentSpeak(L) [Rao, 1996].
Introduccion BDICTL/CTL∗ Axiomas BDI Axiomas multimodales Eventos Compromiso
Las Logicas multimodales BDI
I Cuentan con un componente modal para razonar sobre lasactitudes proposicionales: Creencias, Deseos e Intenciones.
I Tienen un componente temporal para razonar sobre losaspectos dinamicos del sistema. Dependiendo del alcance delos operadores temporales, se pueden definir dos logicas BDI.
I Pueden incluir un componente inspirado en logica dinamicapara razonar sobre la ocurrencia de eventos.
I Tienen un componente de primer orden para meta-expresiones.Y por supuesto, un componente proposicional.
Introduccion BDICTL/CTL∗ Axiomas BDI Axiomas multimodales Eventos Compromiso
Sintaxis BDICTL∗
I Las formulas bien formadas (fbf) de la logica BDICTL∗ son lasdefinidas por la siguiente forma Backus Naur (BNF):
φ ::= ⊥ | | p | ¬φ | φ ∧ φ | (1)
BEL(φ) | DES(φ) | INTEND(φ) | (2)
©φ | φ U φ | Eφ (3)
donde p denota cualquier formula atomica proposicional.
Introduccion BDICTL/CTL∗ Axiomas BDI Axiomas multimodales Eventos Compromiso
Otros operadores proposicionales
I La conjuncion, la implicacion y la equivalencia material sedefinen respectivamente como de costumbre:
I φ ∧ ψ def= ¬(¬φ ∨ ¬ψ).
I φ⇒ ψ)def= (¬φ ∨ ψ).
I φ⇔ ψ)def= ((φ⇒ ψ) ∧ (ψ ⇒ φ)).
I falsedef= ⊥
I truedef= ¬⊥
Introduccion BDICTL/CTL∗ Axiomas BDI Axiomas multimodales Eventos Compromiso
Otros operadores temporales
I Eventualmente, siempre, e inevitablemente se definen como decostumbre:
I 3φdef= true U φ.
I 2φdef= ¬(3¬φ).
I Aφdef= ¬(E¬φ).
I Ejemplos: A3BEL(¬crisis) es una fbf que expresa que en todofuturo posible, eventualmente creeremos que no hay crisis.A(BEL(crisis)⇒ ¬INTEND(viaje)) expresa queinevitablemente si creo que hay crisis entonces no intentoviajes.
Introduccion BDICTL/CTL∗ Axiomas BDI Axiomas multimodales Eventos Compromiso
Formulas de estado
I Las fbfs de estado en la logica BDICTL∗ se defineninductivamente como sigue:
1. Toda fbf proposicional (Ecuacion 1) es una fbf de estado.2. Si φ es una fbf de estado, entonces BEL(φ), DES(φ) e
INTEND(φ) son fbf de estado.3. Si φ es una fbf de camino, entonces Eφ (opcional) y Aφ
(inevitable) son fbfs de estado.
p p, q
r
p, q, r
r, q
Introduccion BDICTL/CTL∗ Axiomas BDI Axiomas multimodales Eventos Compromiso
Formulas de camino
I Las fbf de camino en la logica BDICTL∗ se defineinductivamente como sigue:
1. Cualquier fbf de estado es una fbf de camino (un camino delongitud 1).
2. Si φ y ψ son fbfs de camino, entonces ¬φ y φ ∧ ψ tambien loson.
3. Si φ y ψ son fbfs de camino, entonces ©φ y φ U ψ tambien loson.
p p, q
r
p, q, r
r, q
Introduccion BDICTL/CTL∗ Axiomas BDI Axiomas multimodales Eventos Compromiso
Sintaxis BDICTL
I La logica restringida BDICTL se obtiene al prohibircombinaciones booleanas y anidamiento de los operadorestemporales en las formulas de camino. Formalmente,substituimos la definicion por:
1. Si φ y ψ son fbfs de estado, entonces ©φ y φ U ψ son fbfs decamino.
I Ejemplo: 23crisis, que expresa que siempre eventualmentehay una crisis, es una fbf de camino en BDICTL∗, pero no lo esen BDICTL.
Introduccion BDICTL/CTL∗ Axiomas BDI Axiomas multimodales Eventos Compromiso
Formulas opcionales e inevitables
I El uso de cuantificadores de camino introduce unaclasificacion de las fbfs.
I Las formulas opcionales, denotadas como O-formulas, sonaquellas que no contienen ocurrencias de A (o de la negacionde E) fuera del alcance de los operadores BEL, DES eINTEND.
I Las formulas inevitables, denotadas como I-formulas, sonformulas que no contiene ocurrencias de E (o negaciones deA) fuera del alcance de los operadores intencionales BEL,DES, e INTEND.
Introduccion BDICTL/CTL∗ Axiomas BDI Axiomas multimodales Eventos Compromiso
Semantica de las logicas BDICTL y BDICTL∗
I Estas logicas tienen una semantica basada en mundosposibles.
I Cada mundo posible se define como una estructura de arboldonde los nodos son conjuntos de formulas proposicionales, ylos arcos representan transiciones en el tiempo.
I El pasado es unico, pero el futuro es arborescente, pararepresentar posibles cursos de accion. Una vez que el agenteactua, el pasado se vuelve lineal, debido a que solo uno de loscursos de accion posibles se ha llevado a cabo.
Introduccion BDICTL/CTL∗ Axiomas BDI Axiomas multimodales Eventos Compromiso
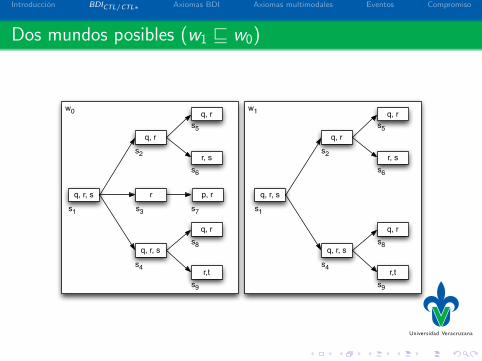
Dos mundos posibles (w1 v w0)
w0 w1
q, r, s r
q, r, s
q, r
p, r
r, s
q, r
q, r
r,t
s1
s2
s3
s4
s5
s6
s7
s8
s9
q, r, s
q, r, s
q, r
r, s
q, r
q, r
r,t
s1
s2
s4
s5
s6
s8
s9
Introduccion BDICTL/CTL∗ Axiomas BDI Axiomas multimodales Eventos Compromiso
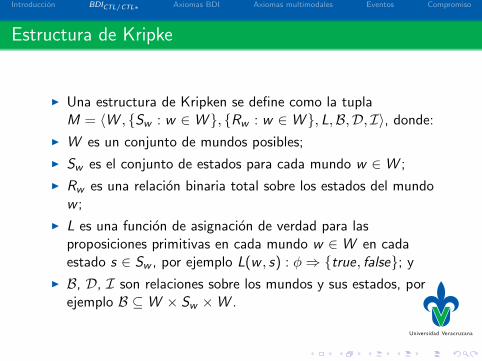
Estructura de Kripke
I Una estructura de Kripken se define como la tuplaM = 〈W , {Sw : w ∈W }, {Rw : w ∈W }, L,B,D, I〉, donde:
I W es un conjunto de mundos posibles;
I Sw es el conjunto de estados para cada mundo w ∈W ;
I Rw es una relacion binaria total sobre los estados del mundow ;
I L es una funcion de asignacion de verdad para lasproposiciones primitivas en cada mundo w ∈W en cadaestado s ∈ Sw , por ejemplo L(w , s) : φ⇒ {true, false}; y
I B, D, I son relaciones sobre los mundos y sus estados, porejemplo B ⊆W × Sw ×W .
Introduccion BDICTL/CTL∗ Axiomas BDI Axiomas multimodales Eventos Compromiso
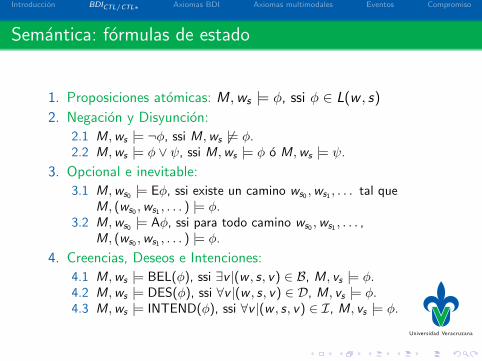
Semantica: formulas de estado
1. Proposiciones atomicas: M,ws |= φ, ssi φ ∈ L(w , s)
2. Negacion y Disyuncion:
2.1 M,ws |= ¬φ, ssi M,ws 6|= φ.2.2 M,ws |= φ ∨ ψ, ssi M,ws |= φ o M,ws |= ψ.
3. Opcional e inevitable:
3.1 M,ws0 |= Eφ, ssi existe un camino ws0 ,ws1 , . . . tal queM, (ws0 ,ws1 , . . . ) |= φ.
3.2 M,ws0 |= Aφ, ssi para todo camino ws0 ,ws1 , . . . ,M, (ws0 ,ws1 , . . . ) |= φ.
4. Creencias, Deseos e Intenciones:
4.1 M,ws |= BEL(φ), ssi ∃v |(w , s, v) ∈ B, M, vs |= φ.4.2 M,ws |= DES(φ), ssi ∀v |(w , s, v) ∈ D, M, vs |= φ.4.3 M,ws |= INTEND(φ), ssi ∀v |(w , s, v) ∈ I, M, vs |= φ.
Introduccion BDICTL/CTL∗ Axiomas BDI Axiomas multimodales Eventos Compromiso
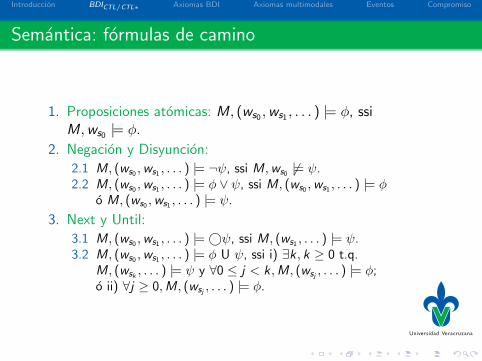
Semantica: formulas de camino
1. Proposiciones atomicas: M, (ws0 ,ws1 , . . . ) |= φ, ssiM,ws0 |= φ.
2. Negacion y Disyuncion:
2.1 M, (ws0 ,ws1 , . . . ) |= ¬ψ, ssi M,ws0 6|= ψ.2.2 M, (ws0 ,ws1 , . . . ) |= φ ∨ ψ, ssi M, (ws0 ,ws1 , . . . ) |= φ
o M, (ws0 ,ws1 , . . . ) |= ψ.
3. Next y Until:
3.1 M, (ws0 ,ws1 , . . . ) |=©ψ, ssi M, (ws1 , . . . ) |= ψ.3.2 M, (ws0 ,ws1 , . . . ) |= φ U ψ, ssi i) ∃k , k ≥ 0 t.q.
M, (wsk, . . . ) |= ψ y ∀0 ≤ j < k ,M, (wsj , . . . ) |= φ;
o ii) ∀j ≥ 0,M, (wsj , . . . ) |= φ.
Introduccion BDICTL/CTL∗ Axiomas BDI Axiomas multimodales Eventos Compromiso
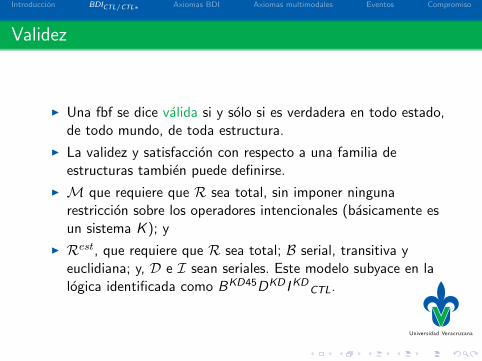
Validez
I Una fbf se dice valida si y solo si es verdadera en todo estado,de todo mundo, de toda estructura.
I La validez y satisfaccion con respecto a una familia deestructuras tambien puede definirse.
I M que requiere que R sea total, sin imponer ningunarestriccion sobre los operadores intencionales (basicamente esun sistema K ); y
I Rest, que requiere que R sea total; B serial, transitiva yeuclidiana; y, D e I sean seriales. Este modelo subyace en lalogica identificada como BKD45DKD I KD
CTL.
Introduccion BDICTL/CTL∗ Axiomas BDI Axiomas multimodales Eventos Compromiso
Relaciones
I Las definiciones de relacion total, serial, transitiva y euclidianason las estandares:
Total: ∀w∀s∃t (s, t) ∈ Rw .Serial: ∀w∀s∃v (w , s, v) ∈ B.
Transitiva: ∀w , v , x ∀s Si (w , s, v) ∈ B ∧ (v , s, x) ∈B, entonces (w , s, x) ∈ B.
Euclidiana: ∀w , v , x ∀x Si (w , s, v) ∈ B ∧ (w , s, x) ∈B, entonces (v , s, x) ∈ B.
Introduccion BDICTL/CTL∗ Axiomas BDI Axiomas multimodales Eventos Compromiso
BDIK
I Las actitudes proposicionales cerradas bajo implicacion:
BK BEL(φ) ∧ BEL(φ⇒ ψ)⇒ BEL(ψ);DK DES(φ) ∧ DES(φ⇒ ψ)⇒ DES(ψ);IK INTEND(φ)∧ INTEND(φ⇒ ψ)⇒ INTEND(ψ);
I Se adopta la regla de generalizacion:
B-Gen Si ` φ entonces ` BEL(φ);D-Gen Si ` φ entonces ` DES(φ);I-Gen Si ` φ entonces ` INTEND(φ);
Introduccion BDICTL/CTL∗ Axiomas BDI Axiomas multimodales Eventos Compromiso
BKD45
I Se asume que las creencias son consistentes y hayintrospeccion positiva y negativa sobre ellas:
BD BEL(φ)⇒ ¬BEL(¬φ);B4 BEL(φ)⇒ BEL(BEL(φ));B5 ¬BEL(φ)⇒ BEL(¬BEL(φ)).
Introduccion BDICTL/CTL∗ Axiomas BDI Axiomas multimodales Eventos Compromiso
BKD45DKD IKD
I Para los deseos y las intenciones se adopta ademas el axiomaD para expresar consistencia entre los deseos y las intenciones.
DD DES(φ)⇒ ¬DES(¬φ);ID INTEND(φ)⇒ ¬INTEND(¬φ);
I Es consistente y completa con respecto a la familia deestructuras Mest
Introduccion BDICTL/CTL∗ Axiomas BDI Axiomas multimodales Eventos Compromiso
Casos significativos
I El conjunto de mundos deseados es un subconjunto deaquellos creıdos posibles, lo que ocurre cuando el agentepuede creer un mundo sin desear estar en el;
I Los mundos creıdos son un subconjunto de los deseados,intuitivamente esto significa que hay ciertos mundos deseadosque no son creıdos por el agente; y
I Algunos mundos que son deseados no son creıdos y viceversa.Como una combinacion de los dos primeros casos.
Introduccion BDICTL/CTL∗ Axiomas BDI Axiomas multimodales Eventos Compromiso
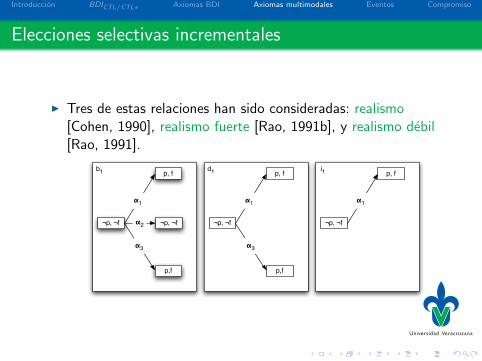
Elecciones selectivas incrementales
I Tres de estas relaciones han sido consideradas: realismo[Cohen, 1990], realismo fuerte [Rao, 1991b], y realismo debil[Rao, 1991].
b1 d1
¬p, ¬f
p,f
α1
α3
p, f i1
¬p, ¬f
α1
p, f
¬p, ¬f ¬p, ¬f
p,f
α1
α2
α3
p, f
Introduccion BDICTL/CTL∗ Axiomas BDI Axiomas multimodales Eventos Compromiso
Realismo fuerte
I Si el agente desea opcionalmente lograr una proposicion,entonces cree que la proposicion es una opcion que, si eselegida, se logra.
I Si φ es una formula-O, las condiciones anteriores se expresancon los axiomas de realismo fuerte:
Realismo fuerte DB DES(φ)⇒ BEL(φ);Realismo fuerte ID INT (φ)⇒ DES(φ).
Introduccion BDICTL/CTL∗ Axiomas BDI Axiomas multimodales Eventos Compromiso
Realismo
I Si un agente cree una proposicion, tambien tiene unaintencion hacıa esa proposicion.
I Si φ es una formula-O:
Realismo BD BEL(φ)⇒ DES(φ);Realismo DI DES(φ)⇒ INT (φ).
Introduccion BDICTL/CTL∗ Axiomas BDI Axiomas multimodales Eventos Compromiso
Realismo debil
I Un punto de equilibrio donde los agentes no desean, niintentan proposiciones que creen falsas; y no intentanproposiciones cuya negacion es deseada.
Realismo debil DB DES(φ)⇒ ¬BEL(¬φ);Realismo debil IB INT (φ)⇒ ¬BEL(¬φ);Realismo debil ID INT (φ)⇒ ¬DES(¬φ).
Introduccion BDICTL/CTL∗ Axiomas BDI Axiomas multimodales Eventos Compromiso
Otras relaciones
I Si un agente tiene una intencion, este cree que tiene talintencion: INT (φ)⇒ BEL(INT (φ))
I Si un agente tiene un deseo, este cree que tiene tal deseo:DES(φ)⇒ BEL(DES(φ))
I Si un agente tiene una intencion, debe desear tal intencion:INT (φ)⇒ DES(INT (φ))
I Si un agente forma una intencion, entonces en algun momentofuturo la abandona. Esto se conoce como no compromisoinfinito (no infinite deferral): INT (φ)⇒ A3(¬INT (φ))
Introduccion BDICTL/CTL∗ Axiomas BDI Axiomas multimodales Eventos Compromiso
Sintaxis
I Sea E un conjunto de sımbolos para referencias eventos;
I Si e ∈ E , entonces succeeds(e), fails(e), does(e),succeeded(e), failed(e), y done(e) son formulas de estado.
Introduccion BDICTL/CTL∗ Axiomas BDI Axiomas multimodales Eventos Compromiso
Semantica
I Incluimos en M los siguientes elementos: Sea E un conjuntode tipos de evento primitivos; SEw : Sw × Sw 7→ E yFEw : Sw × Sw 7→ E las ocurrencias con fracaso y exito de loseventos.
I M,ws1 |= succeeded(e) si y solo si SEw (s0, s1) = eI M,ws1 |= failed(e) si y solo si FEw (s0, s1) = e
Introduccion BDICTL/CTL∗ Axiomas BDI Axiomas multimodales Eventos Compromiso
Axiomatizacion de los eventos
I Las intenciones tienen un caracter volitivo. Un agente de serconsciente de los eventos que ocurren en su medio ambiente:
I INT (does(e))⇒ does(e)I done(e)⇒ BEL(done(e)).
Introduccion BDICTL/CTL∗ Axiomas BDI Axiomas multimodales Eventos Compromiso
Compromiso ciego
I Este agente mantiene sus intenciones hasta que cree que lasha logrado satisfacer:
I INTEND(A3φ)⇒ A(INTEND(A3φ) U BEL(φ))
I INTEND(A3φ)⇒ A3(BEL(φ))
Introduccion BDICTL/CTL∗ Axiomas BDI Axiomas multimodales Eventos Compromiso
Compromiso racional
I El agente mantiene sus intenciones en tanto considera quesiguen siendo una opcion viable:
I INTEND(A3φ) ⇒A(INTEND(A3φ) U (BEL(φ) ∨ BEL(E3φ)))
I INTEND(A3φ) ∧ A(BEL(E3φ)) U BEL(φ))⇒ A3(BEL(φ)).
Introduccion BDICTL/CTL∗ Axiomas BDI Axiomas multimodales Eventos Compromiso
Compromiso emocional
I Este agente mantiene sus intenciones mientras sigadeseandolas:
I INTEND(A3φ)⇒A(INTEND(A3φ) U (BEL(φ) ∨ ¬DES(E3φ)))
I INTEND(A3φ) ∧ A(DES(E3φ)) U BEL(φ)⇒ A3(BEL(φ)).
Introduccion BDICTL/CTL∗ Axiomas BDI Axiomas multimodales Eventos Compromiso
Otros resultados
I Un agente competente sigue BEL(φ)⇒ φ eindependientemente de su compromiso adoptado, llega a creerAFφ

Introduccion BDICTL/CTL∗ Axiomas BDI Axiomas multimodales Eventos Compromiso
Bibliografıa
P.R. Cohen and H.J. Levesque.Intention is choice with commitment.Artificial Intelligence, 42(3):213–261, 1990.
A.S. Rao and M.P. Georgeff.Asymmetry thesis and side-effect problems in linear-time and branching-timeintention logics.Technical Note 13, Australian Artificial Intelligence Institute, Carlton, Victoria,April 1991.published in proceedings of IJCAI-91.
A.S. Rao and M.P. Georgeff.Modelling rational agents within a bdi-architecture.Technical Note 14, Australian Artificial Intelligence Institute, Carlton, Victoria,February 1991.
A. Rao.AgentSpeak(L): BDI agents speak out in a logical computable language.In R. van Hoe, editor, Seventh European Workshop on Modelling AutonomousAgents in a Multi-Agent World, Eindhoven, The Netherlands, 1996.