agents supporting cooperative and self interested human interactions in open, dynamic environments...
Post on 22-Dec-2015
225 views
TRANSCRIPT

Agents Supporting Cooperative and Self Interested Human Interactions in Open,
Dynamic Environments
Katia P. Sycara
School of Computer Science
Carnegie Mellon University
Pittsburgh, PA. 15213 http://www.cs.cmu.edu/~softagents

2Copyright Katia Sycara 2002
Talk Outline
• Agents in Open Environments• Agents Supporting Human Teams
– Information processing (memory intensive) Tasks
– Planning Tasks
• Agents Supporting Organizations– E-commerce activities (negotiation, coalition
formation, auctions)
• Forward to the Past: Agent-Based Web Services

3Copyright Katia Sycara 2002
Vision: Agents on the Web
• A Wired/Wireless World populated with interoperating agents not just data

4Copyright Katia Sycara 2002
Overall Research Goal Develop multiagent technology that allows agents (cooperative
and self-interested) to coordinate autonomously and also assist individuals and human teams in environments that are:• time stressed• distributed• uncertain• open (information sources, communication links and agents
dynamically appear and disappear)Team members (humans and agents) are distributed in terms
of:• time and space• expertise

5Copyright Katia Sycara 2002
Reusable Environment for Task Structured Intelligent Networked Agents
• Adaptive, self-organizing collection of Intelligent Agents infrastructure that interact with the humans and each other.– integrate information management and decision support– anticipate and satisfy human information processing and
problem solving needs– perform real-time synchronization of actions– route and present the right information to the right person
at the right time– adapt to user, task and situation
• Develop schemes for autonomous agent coordination • Multi-agent discovery and interoperation• Multi-agent adaptivity and learning
6Copyright Katia Sycara 2002
Open Environments
• No predefined structure• Agents leave and join the society
dynamically• Communication is not ensured all
the time• Information sources may appear
and disappear

7Copyright Katia Sycara 2002
Generic Tasks in Open Environments
Agents must be able to:• discover each other. We distinguish the
notion of agent location from the notion of agent functionality.– Location is found through Agent Name Services
(ANS)– Functionality/capability is found through Middle
Agents
• interact/transact with each other • compose results of their reasoning• monitor progress of delegated tasks

8Copyright Katia Sycara 2002
The RETSINA Multi-Agent Organization
User 1 User 2 User u
InfoSource 1
InfoSource 1
Interface Agent 1Interface Agent 1 Interface Agent 2Interface Agent 2 Interface Agent iInterface Agent i
Task Agent 1Task Agent 1 Task Agent 2Task Agent 2 Task Agent tTask Agent t
MiddleAgent 2MiddleAgent 2
Info Agent nInfo Agent n
InfoSource 2
InfoSource 2
InfoSource m
InfoSource m
Goal and TaskSpecifications Results
SolutionsTasks
Info & ServiceRequests
Information IntegrationConflict Resolution Replies
Advertisements
Info Agent 1Info Agent 1
Queries
Answers
distributed adaptive collections of information agents that coordinate to retrieve, filter and fuseinformation relevant to the user, task and situation, as well as anticipate user's information needs.
9Copyright Katia Sycara 2002
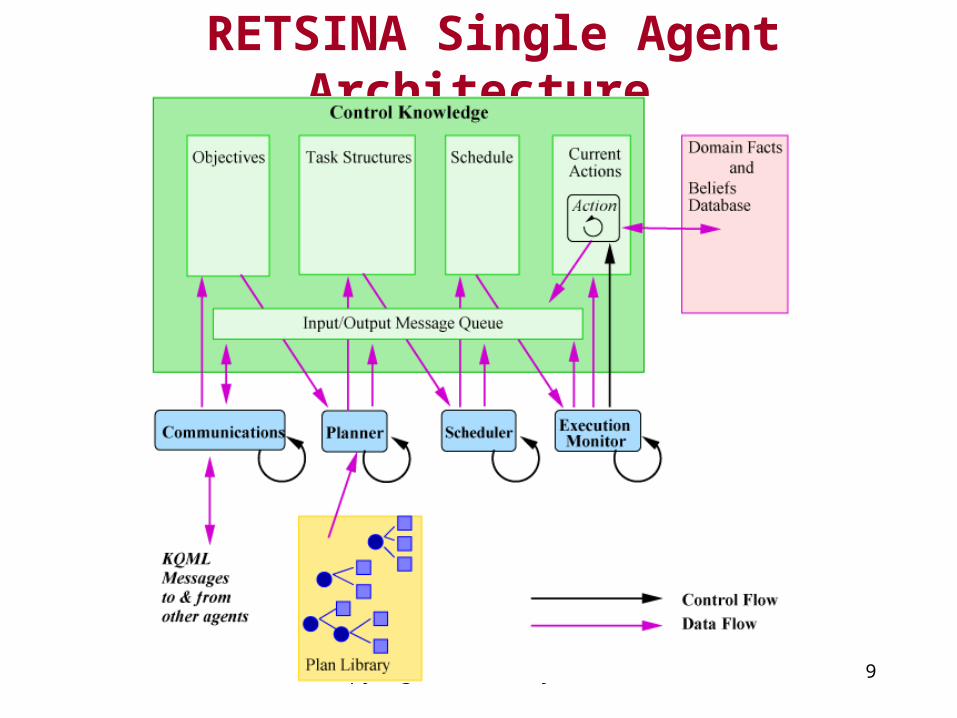
RETSINA Single Agent Architecture

10Copyright Katia Sycara 2002
Some RETSINA Applications
• Aiding Human Teams in joint mission planning (using ModSAF as a simulated battlefield)
• Agent-aided aircraft maintenance
• E-commerce in wholesale markets (agent-based auctions and negotiation)
• Agent-based Supply Chain Management
• Robot teams for de-mining
• Team Rescue Scenario (NEO)
• Agent-based financial portfolio management
• Agent-based “on the move” collaboration on mobile devices

11Copyright Katia Sycara 2002
Visualization of Agent Interactions

12Copyright Katia Sycara 2002
Agent Discovery and Interoperation
• Discovery necessary in open environments• Interoperation necessary for heterogeneous agents• Agents advertise their expertise/capabilities to middle agents• Requester agents ask middle agents for agents with particular
capabilities• Middle agents match requests to advertisements and return results• Communication protocols include formal semantics and
ontologies for interoperation• The discovery scheme enables system robustness through
functional substitutability of agentsSycara, K., Klusch, M. Widoff, S. and Lu, J. "LARKS: Dynamic
Matchmaking among Heterogeneous Agents in Cyberspace", JAAMAS, vol 5, no. 2, July 2002.

13Copyright Katia Sycara 2002
Types of Interactions
• Providers and requesters interact with each other directly– a negotiation phase to find out service parameters and preferences
(if not taken into account in the locating phase)– delegation of service
• Providers and requesters interact through middle agents– middle agent finds provider and delegates– hybrid protocols
• Reasons for interacting through middle agents– privacy issues (anonymization of requesters and providers)– trust issues (enforcement of honesty; not necessarily keep
anonymity of principals); e.g. NetBill

14Copyright Katia Sycara 2002
Broadcaster
BroadcasterRequester
Provider 1 Provider n
Request for service
Broadcast service request
Delegation of serviceResults of
service request
Offer of service
15Copyright Katia Sycara 2002
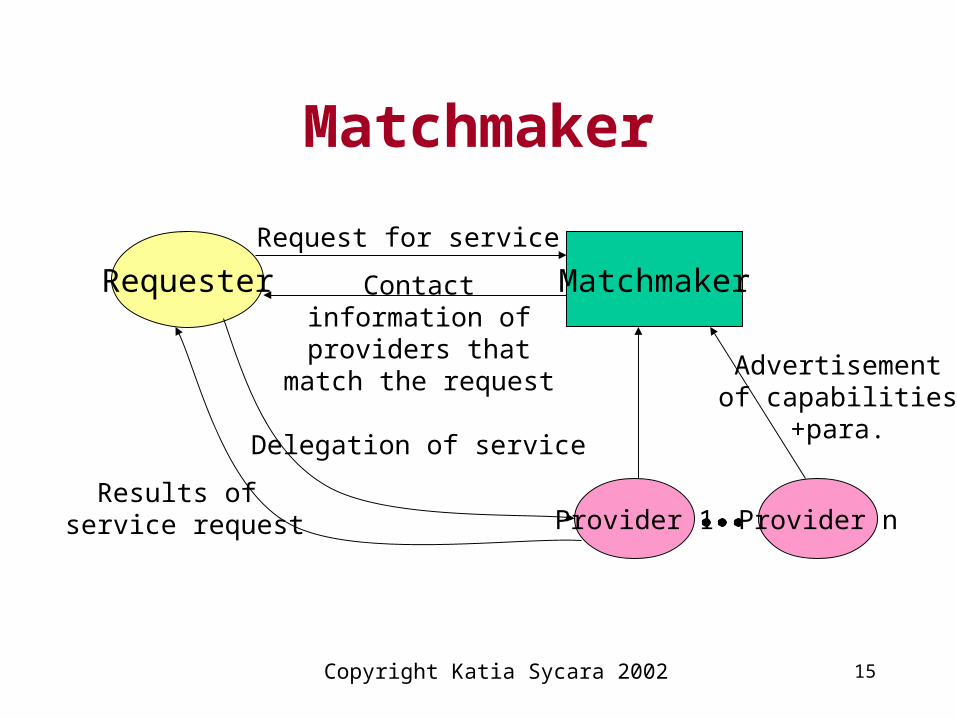
Matchmaker
MatchmakerRequester
Provider 1 Provider n
Request for service
Contact information of providers that match the
request Advertisementof capabilities
+para.Delegation of service
Results of service request
16Copyright Katia Sycara 2002
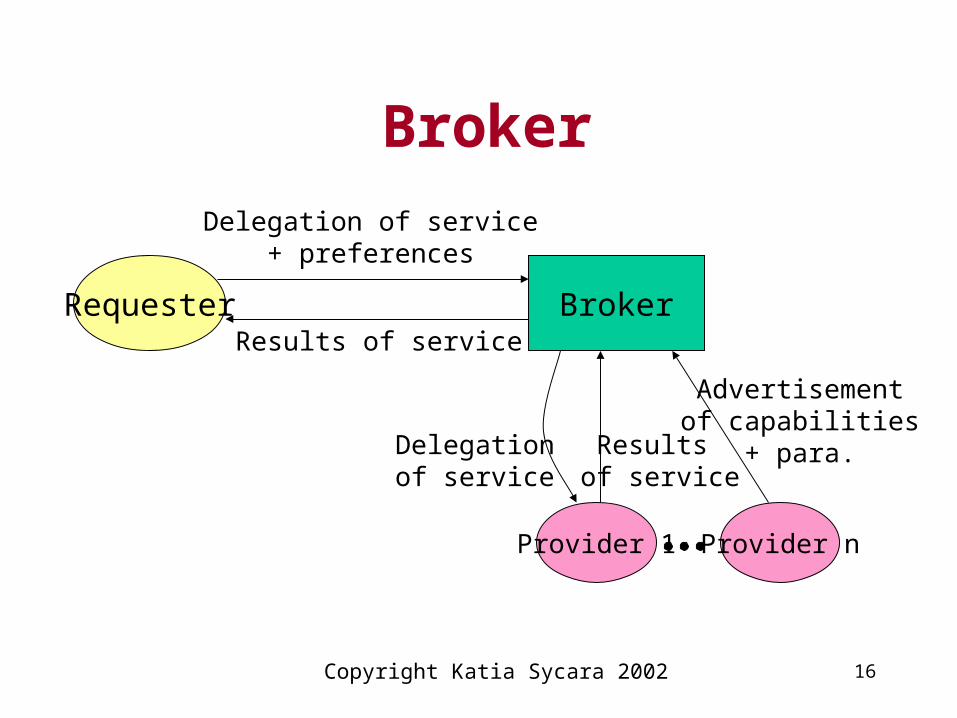
Broker
BrokerRequester
Provider 1 Provider n
Delegation of service+ preferences
Advertisementof capabilities
+ para.Delegationof service
Results of service
Results of service

17Copyright Katia Sycara 2002
Contract Net
ManagerRequester
Provider 2 Provider n
Request for service+ preferences
Offer of service Delegationof service
Results of service
Offer of service
Provider 1
BroadcastBroadcast
Offer of service
Results ofService

18Copyright Katia Sycara 2002
Performance of Match-made System

19Copyright Katia Sycara 2002
Performance of Brokered System

20Copyright Katia Sycara 2002
Hybrid Human-Agent Teams
Human and software agents working together as a team to perform complex tasks in a distributed environment
Agents providing information access as well as user-centered problem-solving and decision support
Agents monitoring team activity and the environment so that effective assistance can be provided

21Copyright Katia Sycara 2002
Human-Agent Teams
Agent Rolessupport for individual team members
simple reactive agents: manage and present information meaningfully, react to event stimuli
planning agents: present courses of action based on emerging events
support for team activitysituation assessment: provide information to the team on environmentfacilitate communication within the teamsupportive behaviours: correcting other team member, requesting backup
as an autonomous team membercannot use human team member roles directlyprobably feasible for information access, event monitoring, planning
of member roles

22Copyright Katia Sycara 2002
Agents in Teams: Expected Improvements
• Reduce time for human teams to arrive at a decision
• Allow teams to consider a broader range of alternatives
• Enable teams to flexibly manage contingencies (replan, repair)
• Reduce individual and team errors
• Increase overall team performance

23Copyright Katia Sycara 2002
NAWCTSD TeamWork Dimensions
Information Exchange•Seeking information from all available sources
•Passing information to the appropriate persons before being asked
•Providing “big picture” situation updates
Communication•Using proper phraseology
•Providing complete internal and external reports
•Avoiding excess chatter
•Ensuring communications are audible and ungarbled
Supporting Behavior•Correcting team errors
•Providing and requesting backup or assistance when needed
Team Initiative/Leadership•Providing guidance or suggestions to team members
•Stating clear team and individual priorities.

24Copyright Katia Sycara 2002
Aiding & Cognitive Resources
We might improve team performance by:
1. Making individual tasks easier freeing cognitive resources for team coordination tasks
2. Aiding aspects of individual task exercised in coordination activities
3. Supporting team coordination tasks directly

25Copyright Katia Sycara 2002
TANDEM Synthetic Radar Task
• Lab Simulation : moderate fidelity Aegis-based simulation
• Characteristics : Real-time, reactive & inflexible
• Task : Forced Pace, High Workload, Highly Dependent on Cooperation, Shared Information, Individual Action
• Cognitive Demands: High working memory load.. – Subjects must access from menus or obtain from teammates five
parameter values and their classifications in order to reach each of their individual targeting decisions
• Studies : contrasted agent aiding for reducing memory load with assistance in communication and cooperation

26Copyright Katia Sycara 2002
Tandem Experiments
• Three team members (Alpha, Bravo, & Charlie) each responsible for a different decision (type, classify, intent)
• Each team member has 3 menus each accessing 3 parameters
• Each team member has 3 pieces of data for his task, but the remaining two items must be obtained from teammates
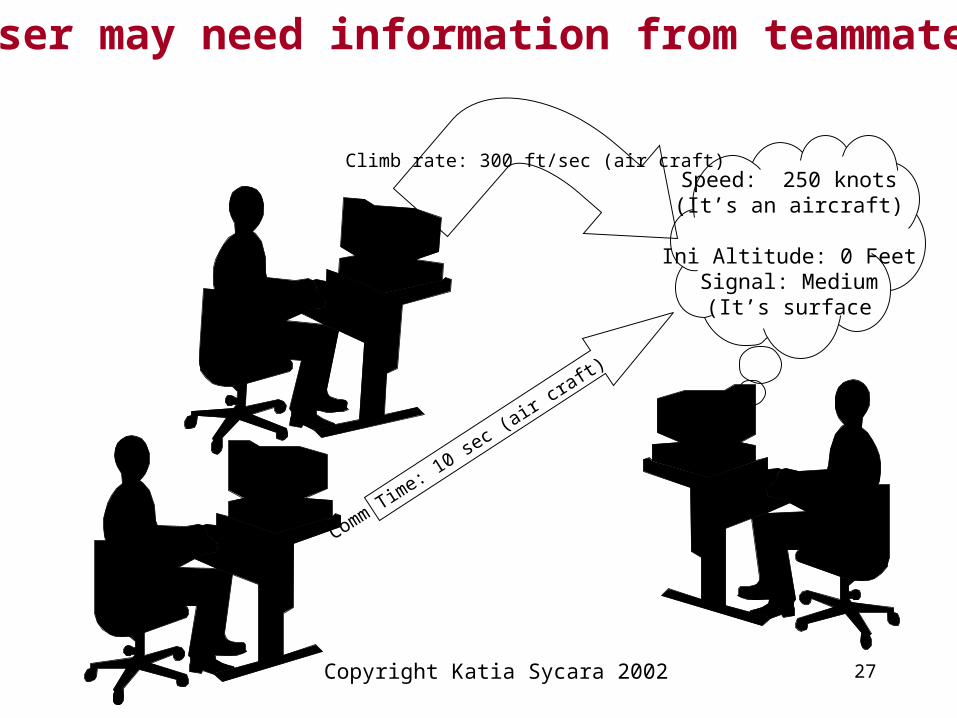
27Copyright Katia Sycara 2002
Speed: 250 knots(It’s an aircraft)
Ini Altitude: 0 FeetSignal: Medium
(It’s surface
Climb rate: 300 ft/sec (air craft)
Comm Time: 1
0 sec (air c
raft)
User may need information from teammates

28Copyright Katia Sycara 2002
Agent Aiding Strategies
Supports Individual'sTask
Supports Team Work
Registry Shows who has whatdata
Facilitates coordination
PersistentMemory
InformationPush
Accumulates values forown task
Pushes accessed values toteammates Reduces verbal
communication Reduces communication
errors
Preserves accessed values for own decision
Preserves accessed valuesfor communication to team

29Copyright Katia Sycara 2002
Experimental Design Between subject design with 4 conditions:
• Individual Memory agent
• Team Registry agent
• Team Push agent
• Control (no agent)
Each task is defined by 5 parameter values, 3 of which a team member can access from menus, the other 2 are gotten from team mates
Three team mates Alpha, Bravo, Charlie, each responsible for a decision (type, intent, classification)

30Copyright Katia Sycara 2002
Experimental Design (cont)
• 10 teams of 3 subjects in each condition (120 subjects)
• Each session contained 3 trials, 15 minutes each
• Each trial included 75 targets with 3 levels of target difficulty
• Target difficulty : hard (25 targets), medium (25 targets) & easy (25 targets)

31Copyright Katia Sycara 2002
Individual Agent
*
*
*
*
***
*
**
*
**
Time : 00:14:25
Agent Window--TYPE-Speed: 27Climb/Dive : -366Signal
--CLASS-Bearing: Origin: Red_SeaRange: 1.4
--INTENT-Countermeasures: NoneElectronic Warfare: Missile Lock : Clean
Hooked Target : 35Radius : 50 nm
OPER A B C
000
270
180
090
*
*
*
*
*
*
*
*
*
*
*
Individual Memory
T SCORE: 1200I SCORE : 1950

32Copyright Katia Sycara 2002
Team Clipboard Agent
*
*
*
***
*
**
*
*
Time : 00:10:25
--TYPE-
Speed: 120Climb/Dive: 0Alt/Depth:Sig Strength: MediumComm Time:
Hooked Target : 45Radius : 50 nm
OPER A B C
000
270
180
090
*
*
*
*
*
*
*
*
*
*
*
Team Push for Alpha
T SCORE: 2500I SCORE : 2800

33Copyright Katia Sycara 2002
Team Checklist Agent
*
*
*
***
*
**
Time : 00:09:25
Hooked Target : 23Radius : 50 nm
OPER A B C
000
270
180
090
*
*
*
*
*
*
*
*
*
*
*
Registry Agent
T SCORE: 2500I SCORE : 2800
--TYPE-
A B C Speed
* B Alt/Depth
A B Climb/Dive
A B Signal Strength
B C Comm Time
--CLASS-
B Intel
*A B Bearing
A C Range
B C Maneuver
--INTENT-
A C Countermeasures
A Electronic War
A B Missile Lock
* C Response
B C Threat

34Copyright Katia Sycara 2002
Identification of Hard Targets
AgentsControl
Ha
rd T
arg
ets
Co
rre
ct
220
210
200
190
180
Copyright Katia Sycara 2002

35Copyright Katia Sycara 2002
Aiding Teams Helps more than Aiding Individuals for Hard Targets
Team Registry
Team Push
Individual Memory
Control
Har
d T
arge
ts C
orre
ct230
220
210
200
190
180
Copyright Katia Sycara 2002

36Copyright Katia Sycara 2002
MokSAF Collaborative Planning Task
• Lab Simulation : MokSAF lightweight agent-based planning environment using ModSAF terrain database and Retsina-like planner
• Characteristics : Deliberative, iterative & multiattribute• Task : Self-Paced, Complex, Highly Dependent on Cooperation,
Shared Information, Team Action• Cognitive Demands: Complex problem-solving, requires multi-
attribute negotiation among subjects• Studies : Comparisons between autonomous, cooperative, and
critiquing route planning agentsPayne, T., Sycara, K. and Lewis, M. “Varying the User Interaction within Multi-Agent
Systems” , In Proceedings of the Fourth International Conference on Autonomous Agents, June 3-7, Barcelona, Spain, 2000. pp 412-418

37Copyright Katia Sycara 2002
Humans & AgentsAgents:
• have access to digital information in the infosphere
• cannot consider intangible objectives which are not part of that digital infosphere
Humans:
• Understand Idiosyncratic and situation-specific factors– local politics, non-quantified information, complex or vaguely specified mission
objectives
• Dynamically changing situations– Information, obstacles, enemy actions
Problem:
• To share and combine human and agent information and resources

38Copyright Katia Sycara 2002
Soil
RendezvousPoint
River
Forest
Road Building Teammate’s route Freeway
Commander’s routeStart Point Constraint
MokSAF Display

39Copyright Katia Sycara 2002
Experiments
• Map planning environment
• Teams of three subjects
• Three conditions
– Control (route critic) Agent
– Autonomous Planning Agent
– Cooperative Planning Agent
• Capability to express intangible constraints via physical artifacts on the map

40Copyright Katia Sycara 2002
Planning Routes

41Copyright Katia Sycara 2002
MokSAF: Autonomous Agent with user supplied constraints

42Copyright Katia Sycara 2002
Cooperative Agent/hilighter mode

43Copyright Katia Sycara 2002
Sharing Plans• Subjects create individual routes to rendezvous point by
– drawing them– asking agent to draw them
• When ready, subjects can share plans with other commanders– all routes will appear on screen
• Can communicate with each other via typing into a comm program– messages go to one commander or all commanders– categorized by subject

44Copyright Katia Sycara 2002
Mission Objectives (Performance Measures)
• All platoons arrive at the specified rendezvous point within a some agreed time frame
• Create an optimal route in terms of path length• The route should not violate any physical constraints• The route should not violate any social constraints (e.g., avoid
this area because the roads are under construction)• The route should pass through areas designated as “go-bys”• Minimize sharing paths with other teammates• The team should take the total number and types of units
specified by the mission briefing.– Too few units is worse than too many units.– An exact match is best.

45Copyright Katia Sycara 2002
Path Length Route Times
Path Length, Route Times, and Fuel Usage were uniformly better for Aided Teams

46Copyright Katia Sycara 2002
Results Vehicle Selection & Successful Rendezvous
On the more difficult Session 2 Rendezvous:• Teams using the Cooperative RPA most closely
approximated reference performance• Teams using the Autonomous RPA made slightly
less appropriate decisions• Teams using the Route Critic Control performed
poorly sometimes failing to rendezvousFor the less difficult Session 3 Rendezvous:• Performance retains ordering although differences
are not significant

47Copyright Katia Sycara 2002
Errors in Vehicle Choice session 2
CooperativeAutonomousControl
Err
ors
13
12
11
10
9
8
7
6

Shuttle LaunchSeveral distributed range operators must collaborate to achieve a successful launch within the launch window or abort the mission in minimal time
Responsible for monitoring a particular area in the launch zoneNegotiate with other range operators
Monitoring of several conditions, such as There should be no civilian or military vehicles in the path of the shuttle, in case of falling debris
The weather conditions need to be such that the exhaust plumage does not fall on inhabited areas
…
Copyright Katia Sycara 2002

Shuttle Launch
Work environment isdistributedtime-criticalinformation-richcommunication-intensive
Increasingly, bottleneck on team performance is not availability of information, but limits on human capabilities: perception, cognition, attention
Copyright Katia Sycara 2002

Supporting Human-Agent Teams in Shuttle Mission Launch
Copyright Katia Sycara 2002

Approach
• Develop task models appropriate to the distributed workflow
• Develop cognitive models of key team members
• Develop software agents to support the team members and the team
• Evaluate the approach and resulting system
Copyright Katia Sycara 2002

Evaluation
• Verification of task and cognitive models with human performance data
• Evaluate effectiveness of software agents using models and then through empirical testing in the laboratory and field settings
• Develop evaluation metrics to assess team performance
Copyright Katia Sycara 2002

Range Operations & Space Launch SafetySpace Launch is an inherently risky business
• Many factors exist that could result in accidents
• However, US Ranges have an outstanding safety record due to:– Safety systems designed to minimized risk and to
validate protocol– Protecting civilians by restricting access to areas of
potential risk– Monitoring environmental factors to determine safe
launch parametersCopyright Katia Sycara 2002

Range Operations & Space Launch Safety
However,
• Existing systems are highly resource & expertise intensive– Want to improve operations, maintain quality
of service, but reduce cost.
Copyright Katia Sycara 2002

Assisting Range OperationsAgents could assist Range Operations Teams
– Monitor team behavior/coordination to highlight emergent risk factors
– Provide assistance during range operations execution
To provide assistance, a model of the team task is required. Team-based Launch Scenario where team members:– Assume responsibility for different cognitive tasks– Are responsible for negotiating and managing shared
resources– Have to respond to unexpected events in a dynamic
environmentCopyright Katia Sycara 2002

MORSE Simulation Environment• MORSE is a simulation environment designed to
reproduce a time critical team based task that provides a variable cognitive load to a human team– Simulates the team-based task of launching a space vehicle
– Logs interaction between team members for the duration of the task
– Provides interfaces to setup and run experiments with various scenarios
– Provides interfaces for team members to focus attention to areas relevant to their responsibilities
• Network communication driven architecture can be extended to allow communication with external systems
Copyright Katia Sycara 2002

Simulation Scenario for MORSESynopsis
• During the hours leading up to a space launch, three Range operators located at three different monitoring stations have to prepare for the launch. This involves:– Monitoring environmental conditions such as
the weather to determine it’s effect on the launch and the surrounding inhabited areas (monitor winds to determine plume dispersion)
– Monitoring the area within the anticipated flight path (Impact Lines)
Copyright Katia Sycara 2002
Simulation Scenario for MORSE
– Allocating resources to prohibit incursions into the areas demarked by Impact Lines
– Determining if the launch should be aborted based on conditions at the time of launch
• The Range operators have access to shared, limited resources, and have to negotiate their allocation to maximize utility while minimizing cost
Copyright Katia Sycara 2002

Team Objectives
Maximize safety, guarantee launch, yet minimize redundancy. Launch will be aborted if:•Weather conditions are severe•There is insufficient radar coverage of the launch path•Civilian vehicles (air or water based) are within the IILs or African Gates•Incursions are expected but interceptors are not in position
Copyright Katia Sycara 2002

MORSE StationsThree stations (each with a different coverage area):
• Cape Canaveral (area around launch site & coastline)
• Antigua (area around Caribbean and South American Coastline)
• Ascension (area over Atlantic Ocean)
Decision Making• Each station is responsible for:
– Ensuring complete coverage of their area of responsibility – Monitoring weather within their domain– Negotiating with team members to acquire resources– Communicating with team members to share gathered data
in order to reduce mission costCopyright Katia Sycara 2002

MORSE Station (Ascension Islands)
The MORSE Station Interface supports communication between team members, resource allocation, planning, etc
This example illustrates the interface (showing the Instantaneous Impact Lines of the current launch) for the Range operator stationed at the Ascension Islands.
Copyright Katia Sycara 2002

Factors affecting the Scenario• Wind (strength and direction)
– Wind Strength and Direction may change throughout scenario
– Wind Strength and Direction affects the dispersion of the plume.
– High temperatures can be a cause for aborting launch
• Space Launch Vehicle– Determines the position of the Impact Lines and hence
the area that must be covered
Copyright Katia Sycara 2002

Factors affecting the Scenario• Radar Stations
– Positions of Radar Stations ensures that maximum coverage is obtained by the users.
– Fewer radar stations make the scenario more difficult because incursions are harder to detect
• Incursions– Initial incursions may be harmless – sea or air traffic
that may clear zones by launch time– Slow incursions on a course that will stay within the
IIL zone till the launch will require escorting by interceptor units.
– Probability of incursions between scenarios is variableCopyright Katia Sycara 2002

Factors affecting the Scenario• Interceptors
– Positions of available interceptor units – Speeds of different units is variable and affects
the ability of that unit to intercept incursions– Fewer interceptors will make the mission harder
• Plume Dispersion– Plume lines demark the anticipated dispersion of
the plume and are affected with the wind speed and direction
– Subjects will need to carefully determine expected dispersion of plume by launch time
Copyright Katia Sycara 2002

Units and Deployment
• Units are available at different locations
• Each unit can be deployed from its current position to a new position by a user that controls that unit
• Deployment of a unit entails:– Acquiring that unit (by request if it is controlled
by another user)– Cost, dependent on unit– Calculation of time required to reach destination
Copyright Katia Sycara 2002

Units and Deployment
• Units include:– Weather Balloons – unlimited– Air Vehicles – several sizes– Sea Vessels – several sizes– Radar Stations (stationary) – user determines
which of these are manned to obtain information
Copyright Katia Sycara 2002

Tasks available to the Subjects (1)• Deploy Weather Balloons
– Weather balloons return the following information about the sector at which they are deployed
• Temperature• Pressure• Wind Speed• Wind Direction• Humidity
– Balloons take a finite amount to time to be deployed and hence there is a delay before data is returned
– Weather data returned by a balloon is available for 4 minutes (4 hours) after deployment
Copyright Katia Sycara 2002

Tasks available to the Subjects (2)• Deploy Interceptors
– A number of different Ocean-going vessels and aircraft are available.
• Positions of these are established before the simulation starts
– Parameters of an interceptor include• Max Speed: Interceptors always travel at this speed• Position: This is position of an interceptor and changes
as it is deployed• Range: This is the maximum distance that the vehicle
can travel• Scope: This is the scope of coverage (i.e. sea or air)
Copyright Katia Sycara 2002

Tasks available to the Subjects (3)
• Control Radar Stations– Select appropriate radar stations
• If a radar station is located at a non-critical area then there may be no need to activate it
• If a radar is inactivated then it may be activated immediately.
• If a radar is in use by another station then it may be requested
Copyright Katia Sycara 2002

Morse Architecture
• Flow of the experiment is controlled by the MORSECommand• MORSECommand models entire mission and simulation world• If MORSEStation displays focused subset of simulation world to each user
Morse-Command
Morse-Station
Morse-Station
Morse-Station
Scenario FileWeather Queries
Timing Synchronizatio
n
Incursion Information
Shared Information
between Stations

Morse Command Station – Team Formation
This is the Initialization Page of the Morse Command Window.
Functions:•Agent Registration•Simulation Setup•Team Setup•Clock Initialization•Simulation Control

Morse Command – Experiment Logging
This page in the MORSE Command logs the experiment events as they occur
Functions:•Logs events such as activation of interceptors, radars, deployment of balloons etc•Logs can be saved to a file.
Copyright Katia Sycara 2002
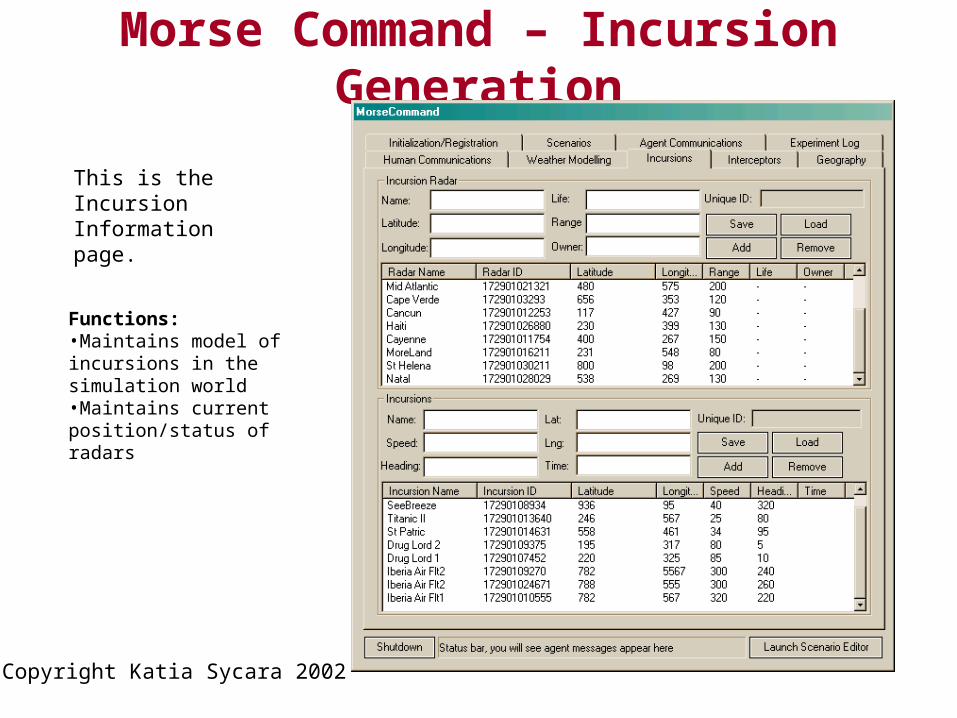
Morse Command – Incursion Generation
Functions:•Maintains model of incursions in the simulation world•Maintains current position/status of radars
This is the Incursion Information page.
Copyright Katia Sycara 2002

Morse Command – Weather Modeling
This is the Weather Modeling Page of the Morse Command Window.Functions:•Models the Weather as a simple random variance around a pivot (Reference Value)•Variance is parameterized and pivots can be specified
Copyright Katia Sycara 2002

MORSE Command – Scenario Editor
The Graphical Scenario Editor can be used to design scenarios. Allows easy placement of units before the simulation starts
Copyright Katia Sycara 2002

76Copyright Katia Sycara 2002
Performance Evaluation
Introduce score-keeping mechanism to provide team performance feedback for individual team members and team itself during the simulation
Based on:• how efficiently resources are being used • how team members coordinate activities• how quickly the infeasibility of launch is
recognised and the mission aborted

77Copyright Katia Sycara 2002
Project Status
Currently:
developing the simulation environment based on task knowledge provided by NASA
Next:
evaluate simulation environment
develop cognitive models
develop agents
study their effectiveness

78Copyright Katia Sycara 2002
Conclusions: How Agents might support human teams
• Leverage implementation & testing by supporting domain independent aspects of teamwork in a variety of contexts
• Acting as bridge between stove-piped systems (currently done by humans e.g. Tandem)
• Acting to reduce the friction of HCI (cooperative RPA engaged participants in problem solving in the domain rather than in operating the system as the autonomous RPA did)

79Copyright Katia Sycara 2002
Multiagent Negotiation

80Copyright Katia Sycara 2002
A General Negotiation Model
• Communicate (offers & counter-offers)
• Compute (based on prior knowledge & negotiation history)
• Repeat / Quit
81Copyright Katia Sycara 2002
Literature Review
• Game theory– Profit dividing model (Rubinstein & Stahl)
• Complete information
• Unique equilibrium
– K-double auction (Chatterjee & Samuelson)• Incomplete information ( buyer and seller know each other’s
reservation price distribution)
• Bayesian belief update
• If the buyer’s offer b is greater than or equal to the seller’s offer s, then trade is possible
• But they may not make a deal even if they could

82Copyright Katia Sycara 2002
Literature Review
• Most multi-agent negotiation models belong to K-double auction framework– Personality model (Bazzan & Bordini)– mental emotion model(Sen et. al.)– Bayesian Learning (Zeng & Sycara)
• AI-based models– Argumentation-based negotiation– Experience-based negotiation
83Copyright Katia Sycara 2002
Desired characteristics of a Negotiation Model
• Support representation of negotiation context
• Be prescriptive
• Incur moderate computational cost
• Model the dynamics of negotiation
• Support learning from feedback in negotiation

84Copyright Katia Sycara 2002
The Bazaar Model
• Uses sequential decision making framework• Players have knowledge about the environment
and other players• History of negotiation is also taken into account• At each stage in the negotiation and for each non-
terminal history, each player has a subjective probability distribution that represents the player’s knowledge at this stage
85Copyright Katia Sycara 2002
The Bazaar Model (cnt)
In response to the most recent action taken by others, a player will:
1. Update his subjective evaluation of the environment and other players, using Bayesian rules (posterior probability calculation)
2. Select the action that maximizes his expected payoff, given the information available at the current stage
86Copyright Katia Sycara 2002
A Simple Example
Suppose that the buyer has two hypotheses about supplier’s reservation price:
H1= $100H2=$130Suppose the buyer has no other knowledge about the
supplier. Then, P(H1)=0.5 and P(H2)=0.5Suppose the buyer also has domain knowledge that “The
suppliers will typically ask a price above their reservation price by 17%” So, P(e/H1)=0.95
and P(e/H2)=0.75, where e denotes the event that the supplier asks $117

87Copyright Katia Sycara 2002
A Simple Example
Now, suppose that the supplier does ask 117.00
Then the buyer uses Bayes rule to calculate P(H1/e) = 55.9 and P(H2/e)= 44.1
Suppose the buyer adopts a simple strategy “Propose a price that is 10% less than the estimated reservation price of the supplier”.
Prior to receiving the supplier’s offer the buyer would have offered 115.00 (the mean of the RP of supplier’s distribution).
After receiving the offer and updating his beliefs, the buyer now offers 113.25.

88Copyright Katia Sycara 2002
Experimental Design
• A buyer, and a supplier• RP private information• The agents try to estimate the other player’s RP• Range of possible actions is integer within [0,
100]• Each player’s utility is linear in the final price• Each agent proposes strictly monotonically.• Each agent has different initial subjective belied
functions

89Copyright Katia Sycara 2002
Experimental Design
Three conditions:• Neither one learns• Both learn• Buyer learns, supplier does not (game is
symmetric)• For each condition, we ran 500 randomly
generated negotiation scenarios• Evaluation criterion the normalized joint Nash
solution (max is o.25)
90Copyright Katia Sycara 2002
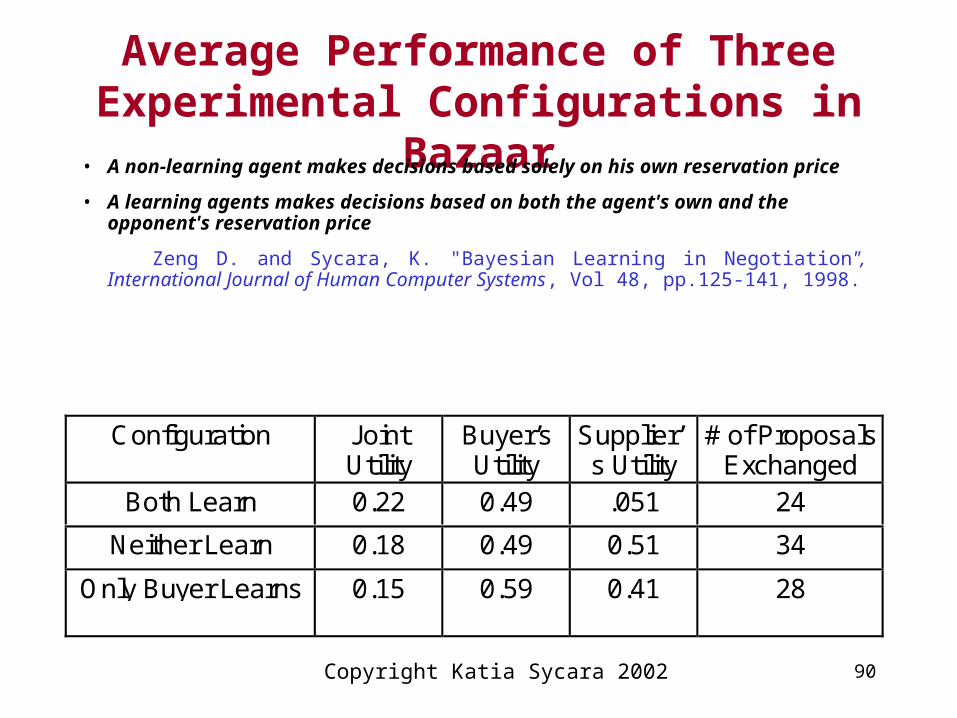
Average Performance of Three Experimental Configurations in Bazaar
• A non-learning agent makes decisions based solely on his own reservation price
• A learning agents makes decisions based on both the agent's own and the opponent's reservation price
Zeng D. and Sycara, K. "Bayesian Learning in Negotiation", International Journal of Human Computer Systems, Vol 48, pp.125-141, 1998.
Configuration JointUtility
Buyer’sUtility
Supplier’s Utility
# of ProposalsExchanged
Both Learn 0.22 0.49 .051 24
Neither Learn 0.18 0.49 0.51 34
Only Buyer Learns 0.15 0.59 0.41 28

91Copyright Katia Sycara 2002
Evaluating Belief Updating Methods
• A variant of K-double auction model
• No Bayesian update
• Take finite bargaining time into consideration
• Provide a set of belief updating methods for agents’ human master to choose
• Easy implementation

92Copyright Katia Sycara 2002
Evaluating Belief Updating Methods
• Finite bargaining time
• DP like offering strategy
)}(){Pr(maxarg
)}(){Pr(max)(
1*
1*
xfax
xfaxf
ta
ta
t
:x
T
:)(xft
:)Pr(a
Agent’s offer
Expected profit at time t if offer x
Agent’s belief that his opponent will offer a

93Copyright Katia Sycara 2002
Belief Updating Methods
• Negotiation range:
• Buyer and seller’s offer at time t:
• Buyer’s updating method (Seller’s is similar)
]max,[min PP
tt Sb ,
],[ tt Sb
],[min tSP
Uniform Exp (1) Exp (2)
],[min tSP ],[min tSP
],[ tt Sb],[ tt Sb

94Copyright Katia Sycara 2002
Belief Updating Methods
• Two exponential updating (over )
})(
exp{1
)Pr(tT
Sa
Za t
],[ tt Sb
})(
exp{1
)Pr(tT
ba
Za t
(1)
(2)
:T :
:Z
tb tS
)Pr(atb tS
)Pr(a
Finite bargaining time
Normalization factor
Control parameter

95Copyright Katia Sycara 2002
Intuition (buyer’s viewpoint)
• Seller’s value is higher than my current offer update over interval
• I may have over-bided, update belief over interval
],[ tt Sb,tb
],[min tSP
tStb PmaxPmin
],[min tSP
],[ tt Sb

96Copyright Katia Sycara 2002
Intuition (buyer’s viewpoint)
• I belief the seller is not likely to move back from his current offer exp method (2)
• There is still enough negotiation space, exp method (1) (does not trust the seller)
,tS

97Copyright Katia Sycara 2002
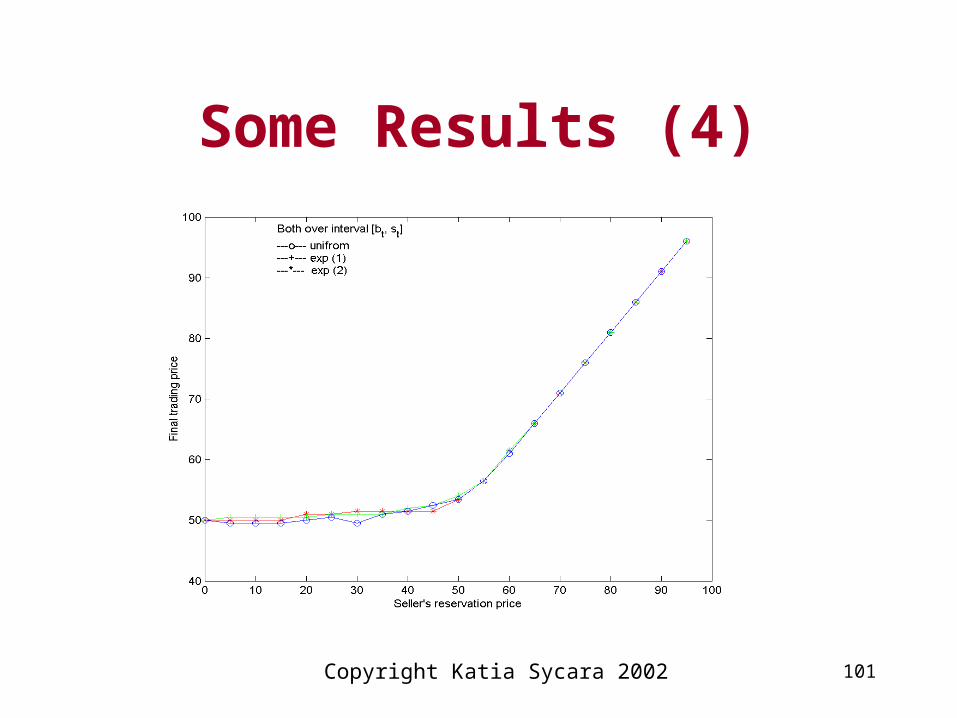
Numerical Experiments
• Negotiation range [0, 100]
• Fix buyers’ reservation price to 100
• In different experiments, increase seller’s reservation price from 0 to 100
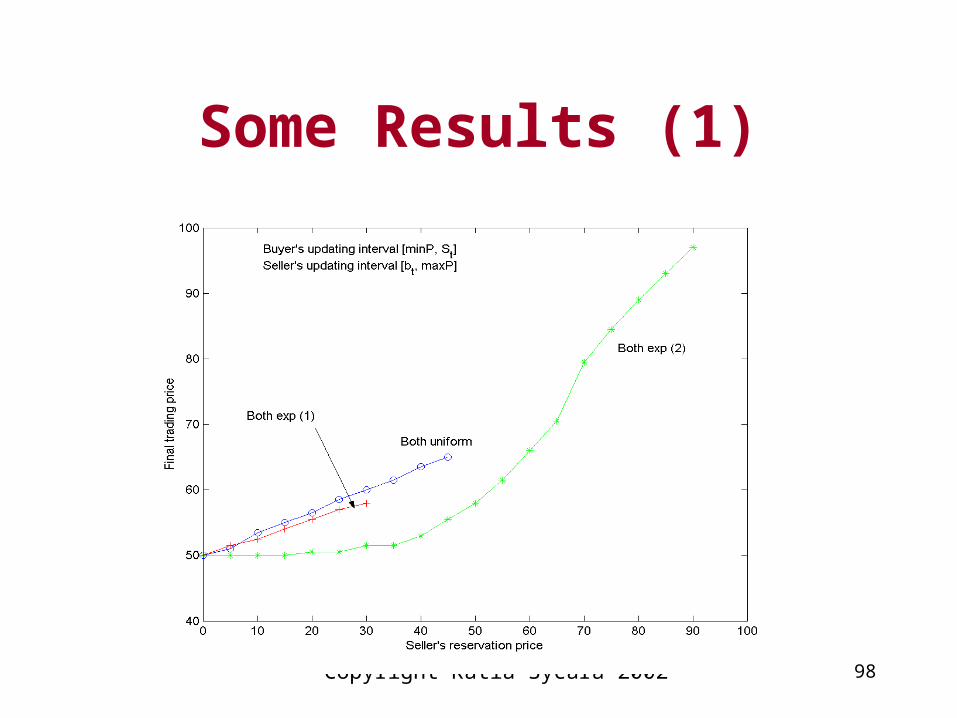
98Copyright Katia Sycara 2002
Some Results (1)

99Copyright Katia Sycara 2002
Some Results (2)

100Copyright Katia Sycara 2002
Some Results (3)
101Copyright Katia Sycara 2002
Some Results (4)

102Copyright Katia Sycara 2002
Some Results (5)

103Copyright Katia Sycara 2002
Some Results (6)

104Copyright Katia Sycara 2002
Some Results (7)

105Copyright Katia Sycara 2002
Some Results (8)
106Copyright Katia Sycara 2002
Conclusion
• It is hard to interpret your opponent’s behavior in bargaining– general knowledge about the environment– specific knowledge about your opponent
• We leave task to the agent’s human master• We provide a computational model for
human to control their agents’ negotiation behavior

107Copyright Katia Sycara 2002
Work on Coalitions Yamamoto, J, and Sycara, K. “A Stable and Efficient Buyer Coalition
Scheme for e-Marketplaces” Proceedings of the Fifth International Conference on Autonomous Agents, May 28-June 1, Montreal, CA. 2001.
Li, C. and Sycara, K. “Algorithms for Coalition Formation and Payoff Division in e-Marketplace”, Proceedings of the International Conference on Autonomous Agents and Multiagent Systems, Bologna, Italy, July 15-19, 2002.
108Copyright Katia Sycara 2002
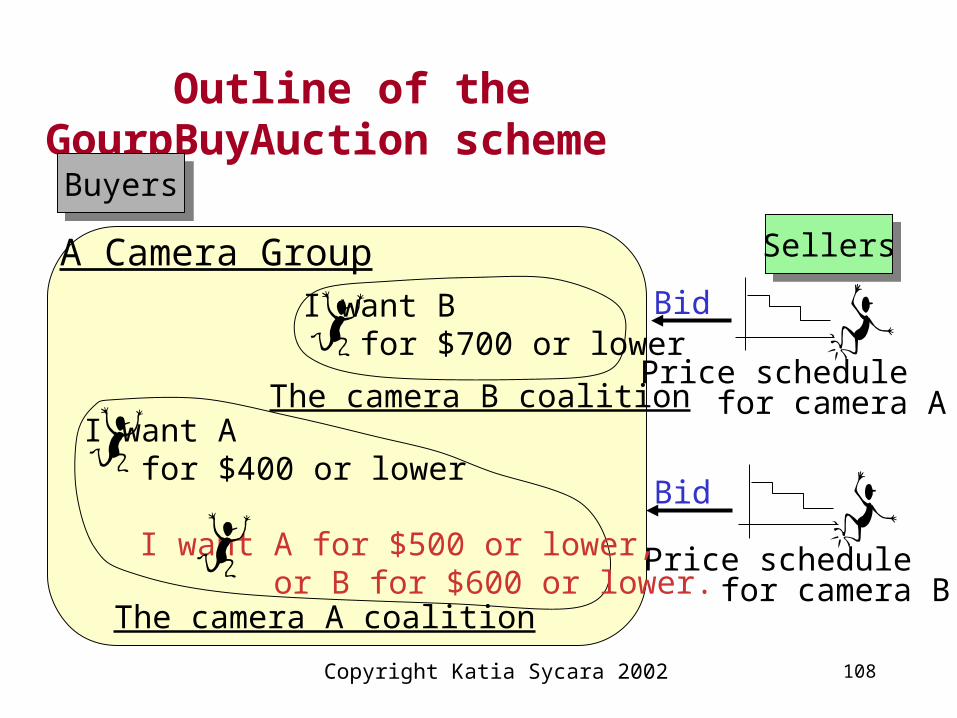
Outline of the GourpBuyAuction scheme
A Camera Group
BuyersBuyers
SellersSellers
The camera B coalition
The camera A coalition
Price schedule for camera A
Bid
Bid
Price schedule for camera B
I want B for $700 or lower
I want A for $400 or lower
I want A for $500 or lower, or B for $600 or lower.

109Copyright Katia Sycara 2002
Coalitions
A buyers’ coalition is a group of buyers that want to buy the same item.•Buyers in a coalition may pay different prices for the same item depending on their reservation prices
•Desired goals for the coalition are:•Increase the number of buyers who can purchase items•Increase group utility and individual buyers utility•Divide the total utility among buyers in a fair and stable way.
.

110Copyright Katia Sycara 2002
Coalitions
A buyers’ coalition is a group of buyers that want to buy the same item.•Buyers in a coalition may pay different prices for the same item depending on their reservation prices
•Desired goals for the coalition are:•Increase the number of buyers who can purchase items•Increase group utility and individual buyers utility•Divide the total utility among buyers in a fair and stable way.
.

111Copyright Katia Sycara 2002
An Example
Buyers: b0, {(item0, 100), (item2, 70)} b1, {(item0, 80), (item1, 95), item2,95)}
. b2, {(item1, 95)} b3, {(item1,65)} b4, {(item1, 85), (item2, 95)}
Price schedule (assume all 3 items have same price schedule, for the example)One unit: 100, two units 95, three units 90, etc
Possible coalitions: item0 ({b0}) item1: ({b1,b2},{b1,b2,b4},{b1,b2,b3,b4})Item2: ({b1,b4})Our scheme derives: item0 ({b0)}: b0 pays 100Item1 ({b1,b2,b4}) : b1 pays 92.5; b2 pays 92.5, b4 pays 85

112Copyright Katia Sycara 2002
Approach to Coalition Formation
Principle 1: Maximize the utility of the most valuable coalition,then maximize the utility of the second valuable one,and continue recursively.
Principle 2:Distribute the surplus of each coalitionwithin the coalition in a stable way.
•Our coalition formation algorithm is a variant of the weighted set packing problem O (2**n) (n is the number of buyers)•If we assume that the number of items in a category is bounded above by an integer K, independent of n, then O(n*log*n)

113Copyright Katia Sycara 2002
bk: a buyer,gi: an item,rki: the reservation price of a buyer bk for gi,Ci : a buyer coalition to purchase gi.
vi(k) = rki - pk The utility of buyer bk
gained from buying gi at the price pk,
vi(Ci) = Sum of vi(k) where bk in CiThe utility of a buyer coalitiongained from buying gi.
Buyers’ Utility

114Copyright Katia Sycara 2002
Coalition Configuration Algorithm
A Camera GroupBuyersBuyers
SellersSellers
The camera B coalition
The camera A coalition
Price schedule for camera A
Bid
Bid
Price schedule for camera B
I want B for $700 or lower
I want Afor $400 or lower
I want A for $500 or lower, or B for $600 or lower.
(1) Maximize the utilityof the most valuable coalition.
(1) Maximize the utilityof the most valuable coalition.
(2) Then maximize the utility of the second valuable coalition,and continue recursively...
(2) Then maximize the utility of the second valuable coalition,and continue recursively...

115Copyright Katia Sycara 2002
Surplus Sharing Rule in a Coalition
Distribute the surplus of each coalitionwithin the coalition.
Distribute the surplus of each coalitionwithin the coalition.
Coalition Ci = {b0, b1, …, b5}
Reser-vationPrice
Share ofSurplus
Priceto Pay
b0 b1 b2 b3 b4 b5
Total Price for Ci to Pay
Surplus vi(Ci)Price

116Copyright Katia Sycara 2002
Stability of the Surplus Sharing Rule
Proposition For any coalition Ci , the surplus distribution is in the core of coalitional game with transferable payoff < Ci, vi>
Proposition For any coalition Ci , the surplus distribution is in the core of coalitional game with transferable payoff < Ci, vi>
No subset of buyers in a coalition can obtain utilitythat exceeds the sum of the current utility of the membersin the subset.

117Copyright Katia Sycara 2002
Effectiveness in Increasing Buyers’ Benefits
- Simulate buyers’ behaviors under several conditions at three group buying schemes:
(1) our scheme,(2) a traditional scheme,(3) an optimal scheme.
- Compare the three schemes using the evaluation criteria:(a) group’s total utility,(b) the number of buyers who can obtain items.
- Assume that a buyer randomly selects preferred items and reservation prices; they are not affected by others.

118Copyright Katia Sycara 2002
Simulation Results
Summary of Simulation Results
(1) Our scheme performed better than the traditional scheme under most conditions,
(2) Our scheme performed well close to the optimal scheme under most conditions which the optimal scheme could handle.

119Copyright Katia Sycara 2002
Simulation Results
How steeply the volumediscount price decreases
Group’s total utility
Examples of simulation results.
0 How steeply the volumediscount price decreases
The number of buyers who get items
0
50500
Our schemeA traditional schemeAn optimal scheme
Parameters: The number of items = 3 The number of buyers = 50 …….

120Copyright Katia Sycara 2002
Optimal coalition formation in Combinatorial Auctions
• Coalition formation allows buyers to enjoy volume discounts • In combinatorial auctions buyers place bids for bundles of
items.• How to form an “optimal” combinatorial coalition of
buyers?• What is a “fair” mechanism to distribute the profit among
members of the coalition?Li, C. and Sycara, K. “Algorithms for Coalition Formation and Payoff Division in e-
Marketplace”, Proceedings of the International Conference on Autonomous Agents and Multiagent Systems, Bologna, Italy, July 15-19, 2002.

121Copyright Katia Sycara 2002
Sellers: I’m happy to sell more goods with a lower price.
Let’s see an example
Cell phone
Service Prog.
$450 Buyer 1
Buyer 2
1 2
$500
$405
1 2
$50
$40 $450
1
1
1
1
Buyers: Only a cell phone or service program means nothing to me !

122Copyright Katia Sycara 2002
Coalition formation
Cell phone Service program
Buyer 1 $405 $45
Buyer 2 $400 $50
Sum $805 $95< $405*2 > $40*2
Let’s take advantage of the price discounts…

123Copyright Katia Sycara 2002
Combinatorial bidding
Buyer 1 I bid $450 < $550
Buyer 2 I bid $450 < $550
I want all of m units of a and n units of b (and …) for no more than r.

124Copyright Katia Sycara 2002
Combinatorial coalition formation
Buyer 1 I bid $450
Buyer 2 I bid $450
Combinatorial bidding + Coalition formation
Sum: $900 > $($405+$40)*2

125Copyright Katia Sycara 2002
Combinatorial Coalition Formation(CCF)
Item 1
Item 2
Item K
11q
21q
22q
31q
32q
1r
2r
Nr
Buyer 1
Buyer 2
Buyer N
1p
2p
Kp

126Copyright Katia Sycara 2002
Questions• How to form an “optimal” coalition of
buyers?
• What is a “fair” mechanism to distribute the profit among members of the coalition?
127Copyright Katia Sycara 2002
Literature review• Economics Payoff division of coalitions
Osborne and Rubinstein[94]
Mech. design of comb. AuctionsBykowsky[95], Rassenti[82]
• Computer science Coalition formation: Yamamoto and Sycara (01), Lerman[00],
Sen[00], Shehory[99], Sandholm[97]
Winner determination: Sandholm[99], Fujishima[99], Andersson[00], Wurman[00], etc.

128Copyright Katia Sycara 2002
Problem formulation• Maximize the value of the coalition:
* max ( )C B
C v C
' ( '), 'C Cv x C C C
1
( ) ( ( ))n
Kk k
n n k Cb C k
v C r q p q
( ) ( )Cb C
x b v C
Divide the payoff in the core:
(no members can get better payoff by deviating from the coalition)
'
)()'(Cb
CC bxCx

129Copyright Katia Sycara 2002
Assumptions• Items are sold in fixed price schedules
• Buyers tell the truth about their reservation costs
• A partial bundle has value zero
• One-shot winner determination

130Copyright Katia Sycara 2002
Main Idea• Price dominates the decision for coalition formation
• Use divide and conquer to search for the optimal coalition
– For each item, find its optimal sub-coalition
– Apply transfer of reservation cost/price between optimal sub-coalitions to get the optimal coalition
• Approximate algorithm for optimal coalition by considering only greedy transfer of reservation costs
131Copyright Katia Sycara 2002
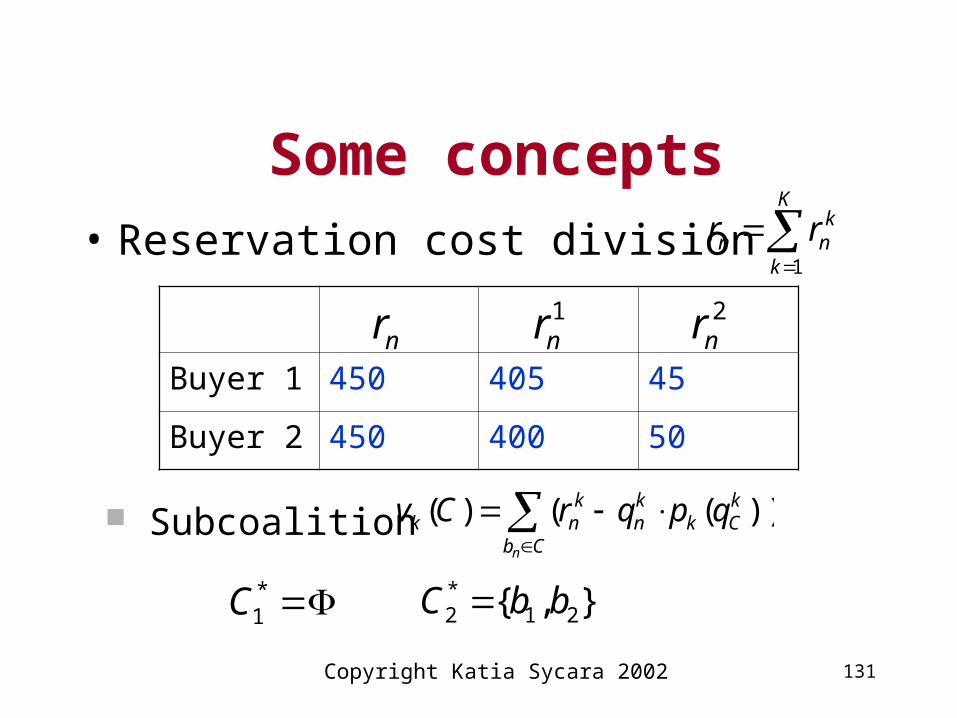
Some concepts• Reservation cost division
Buyer 1 450 405 45
Buyer 2 450 400 50
1nr
2nrnr
Subcoalition
*1C },{ 21
*2 bbC
Cb
kCk
kn
knk
n
qpqrCv ))(()(
K
k
knn rr
1
132Copyright Katia Sycara 2002
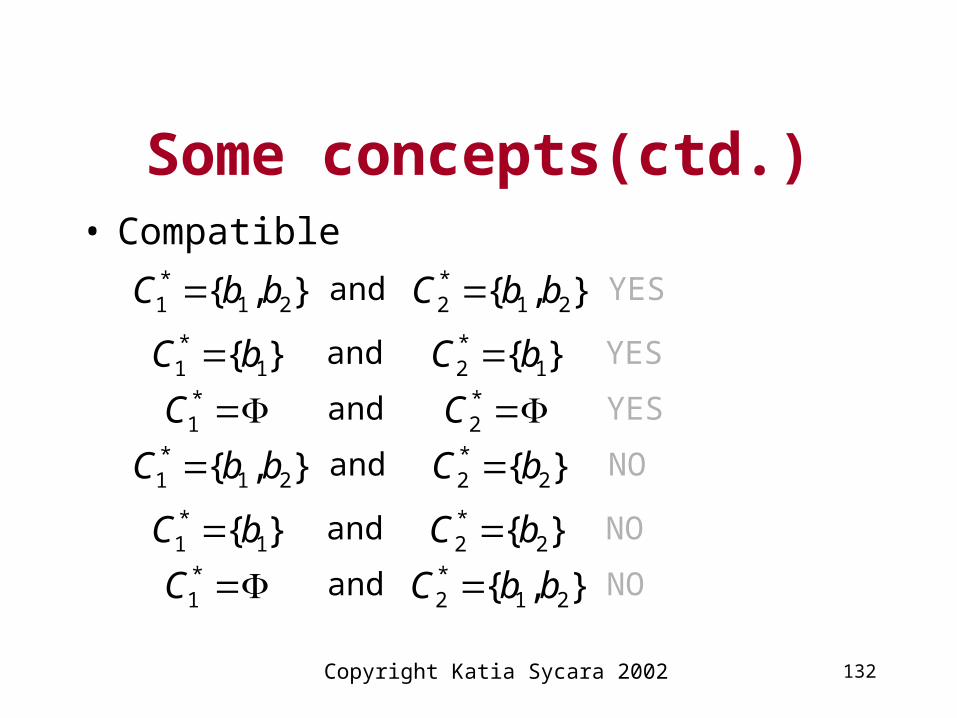
Some concepts(ctd.)• Compatible
},{ 21*1 bbC and },{ 21
*2 bbC
}{ 1*1 bC and }{ 1
*2 bC
*1C and *
2C
},{ 21*1 bbC and }{ 2
*2 bC
}{ 1*1 bC and }{ 2
*2 bC
*1C and },{ 21
*2 bbC
YES
YES
YES
NO
NO
NO

133Copyright Katia Sycara 2002
Approach
Reservation cost division
Subcoalition formation & Payoff division
Compatible?
Reservation cost transfer
No
Derive the CCF coalition & payoff
division
Yes

134Copyright Katia Sycara 2002
Why subcoalitions?Claim 2: If the optimal subcoalitions are
compatible, then the derived coalition is optimal.
If each subcoalition distribute the payoff in the core, then the payoff division obtained by summing up the payoff in the subcoalitions for each buyer is in the core of the derived coalition.

135Copyright Katia Sycara 2002
Go back to the example…
Buyer 1 450 403 47
Buyer 2 450 411 39
1nr
2nrnr
},{ 21*1 bbC
},{ 21*2 bbC
},{ 21* bbC comp.
}4,0{)( *11 Cx
}0,6{)( *22 Cx
)(}4,6{)( ** CCoreCx

136Copyright Katia Sycara 2002
Existence of compatible optimal subcoalitions
Linear price function:
Claim 3: Suppose the price functions are linear price functions, then there exists a reservation cost division such that the optimal subcoalitions are compatible.
( )k k kp m d m a
From now on, the focus will be put on the systems with linear price functions…

137Copyright Katia Sycara 2002
Need to solve …• Q1: How to efficiently form an optimal
subcoalition • Q2: How to distribute the payoff in the core of the
subcoalitions• Q3: How to transfer the virtual reservation cost
among items to make the optimal subcoalitions compatible
• Q4: How to construct an approximation algorithm in polynomial time

138Copyright Katia Sycara 2002
Q1: Optimal Subcoalition Formation…
• In Yamamoto and Sycara, we showed efficient and accurate algorithm for coalition formation for single unit items. This algorithm was extended to coalition formation for multiple units.

139Copyright Katia Sycara 2002
Q2: Subcoalition payoff division
Can be realized in ( log )O K N N

140Copyright Katia Sycara 2002
Q3: Reservation cost transfer scheme
Check the buyers one by one. If a sub-coalition is not compatible with respect to buyer b, then redistribute the reservation cost of b.
Converges to a set of compatible optimal subcoalitions

141Copyright Katia Sycara 2002
Q4: Approximation Algorithm
• Use the heuristic: Once a buyer has been excluded from all sub coalitions, there is a very small possibility that he will be included in the optimal coalition.
• Therefore, discard the buyer from the buyer set.• This results in a polynomial time algorithm

142Copyright Katia Sycara 2002
Experiment:instance generation
• System scale:
number of buyers and items• System characteristics:
DS(Discount Slope)RBMI(the Ratio of Buyers preferring Multiple
Items)RBBR(the Ratio of Buyers Bidding at the
Retail Prices)

143Copyright Katia Sycara 2002
Experiment: numerical result
144Copyright Katia Sycara 2002
Research Results
• Developed a polynomial time approximation algorithm for formation of ccf (coalition formation is NP-complete)
• Good ratio to the optimal value by experimental results
• Payoff division scheme in the core of the coalition, guaranteeing coalition stability

145Copyright Katia Sycara 2002
Multiunit Double Auctions: Design goals• Efficient
– Maximizes the collective profit of all the participating agents
• Strategy-proof– Induce agents to honestly report their private information
• Budget-balanced– The market does not need to be subsidized by outside
sources
• Individual rational– Agents will voluntarily attend the market because of
expected positive profit

146Copyright Katia Sycara 2002
Design goals (cont)• We can not achieve all four goals at the same time• For MDAs, we also need to consider the volume
issues • Trade-offs
– Asymptotically efficient– Strategy-proof in price– Weakly budget-balanced– Individual rational– Hard for sellers to influence market price by
misreporting volumes

147Copyright Katia Sycara 2002
The Mechanism
148Copyright Katia Sycara 2002
The Mechanism
• Two-side Vickrey-like auction
• Balance the supply volume and the demand volume
• Main result– If the buyers and sellers' volumes are public
information, the above mechanism is strategy-proof with respect to reservation price, weakly budget-balanced, and individually rational.

149Copyright Katia Sycara 2002
Sellers’ volume strategy
• Sellers may drive the market price up by tightening the supply volume
• Though possible, it is hard to for sellers to do so because the information disclosure rule of our market– Only sellers with index j<L can do so
– Sellers do not how much to under-report• Lack of information of the whole market
• Gaming between sellers

150Copyright Katia Sycara 2002
Efficiency
• Market loss – Market values loss between buyer K and seller
L (part A and part B in the figure) – Market values loss in order to balance the
supply and demand volume

151Copyright Katia Sycara 2002
Efficiency
• Main results– Given the number of agents who successfully
trade is large, the market is asymptotically efficient
– Under some weak assumptions, given the number of agents, trade or not, is large, the market is asymptotically efficient

152Copyright Katia Sycara 2002
Conclusions• Agents are becoming a reality• One of the killer applications is going to be the
deployment of agents as the future generation of Web Services
• Remaining open issues – Scalability of coordination– Predictability of overall results of a MAS– Agent trust– Semantic interoperation– Human delegation– Agent customization

153Copyright Katia Sycara 2002
Reference slides
Sycara, K., Klusch, M. Widoff, S. and Lu, J. "LARKS: Dynamic Matchmaking among Heterogeneous Agents in Cyberspace", Journal of Autonomous Agents and Multiagent Systems, vol 5, no. 2, July 2002.
Yamamoto, J, and Sycara, K. “A Stable and Efficient Buyer Coalition Scheme for e-Marketplaces” Proceedings of the Fifth International Conference on Autonomous Agents, May 28-June 1, Montreal, CA. 2001.
Li, C. and Sycara, K. “Algorithms for Coalition Formation and Payoff Division in e-Marketplace”, Proceedings of the International Conference on Autonomous Agents and Multiagent Systems, Bologna, Italy, July 15-19, 2002.
Payne, T., Sycara, K. and Lewis, M. “Varying the User Interaction within Multi-Agent Systems” , In Proceedings of the Fourth International Conference on Autonomous Agents, June 3-7, Barcelona, Spain, 2000. pp 412-418

154Copyright Katia Sycara 2002
References
Lenox T., Hahn, S., Lewis M., Payne T. and Sycara, K. “Agent Based Aiding for Individual and Team Planning Tasks”, IEA 2000/HFES 2000 Congress.
Paolucci, M., Onn Shehory and Sycara, K., “Interleaving Planning and Execution in a Multiagent Team Planning Environment”. In the Journal of Electronic Transactions of Artificial Intelligence, May 2001.
Decker, K., Sycara, K. and Williamson, M. "Middle-Agents for the Internet", Proceedings of the Fifteenth International Joint Conference on Artificial Intelligence (IJCAI-97), Nagoya, Japan, August 1997 pp. 578-584.
Wong, C. and Sycara, K. “A Taxonomy of Middle Agents for the Internet” In Proceedings of the Fourth International Conference on Multiagent Systems, July 10-12, Boston MA., 2000 pp. 465-466.
Huang, P., Scheller-Wolf, A. and Sycara, K. “Design of a Multi-Unit Double Auction Market”, Computational Intelligence, Vol. 18, No. 4, 2002 (Special issue on Agent Technology for Electronic Commerce) .
Sycara, K. and Lewis, M. “Integrating Agents into Human Teams”, In Salas E. (ed.) Team Cognition, Erlbaum Publishers, 2002.