agreement among decentralized decision makers
DESCRIPTION
We study the convergence of opinions in a multi-agent system under various assumptionson interaction dynamics. We begin by studying the opinion dynamics of a network withconstant, doubly stochastic transition kernels. A general result is shown which providesconditions of agreement. We extend this model by introducing a finite number of stubbornagents. Convergence is shown to a convex combination of the initial opinions of the stubbornagents. A user-prescribed state dependent update algorithm is introduced to model systemswith limited communication capabilities. We then move to study the convergence of opinionsin a random model that allows for stochastic agreement. Motivated by a cost reductionphenomenon, a transition kernel is designed to force agents to interact more when theiropinions are widely dispersed and interact less when their opinions are tightly spread. Thecomplexity increases with each model to reflect more realistic behaviour. We obtain manyconvergence results from these models, of which the implications are heavily explored.TRANSCRIPT
Mathematics and Engineering 4th Year Project
Agreement Among Decentralized Decision Makers
Ryan Shrott 10016608
Ariel Hubert 10018729
Victor Li 10025708
Payton Karch 10002247
Professor Serdar Yuksel
Thursday 16th April, 2015
1

1 Acknowledgments
We would like to extend our sincerest gratitude to Professor Serdar Yuksel for his unwaveringsupport throughout the last eight months. His guidance led us to a better understandingof the background knowledge required to study interaction dynamics. Professor Yukselprovided us with a lot of support and direction and kept us on track throughout the entireprocess. We would also like to thank our classmates of Apple Math ’15 for their support.Finally, we would like to thank the rest of the professors in the engineering faculty at Queen’sfor giving us the tools we needed to obtain our results.
2

2 Abstract
We study the convergence of opinions in a multi-agent system under various assumptionson interaction dynamics. We begin by studying the opinion dynamics of a network withconstant, doubly stochastic transition kernels. A general result is shown which providesconditions of agreement. We extend this model by introducing a finite number of stubbornagents. Convergence is shown to a convex combination of the initial opinions of the stubbornagents. A user-prescribed state dependent update algorithm is introduced to model systemswith limited communication capabilities. We then move to study the convergence of opinionsin a random model that allows for stochastic agreement. Motivated by a cost reductionphenomenon, a transition kernel is designed to force agents to interact more when theiropinions are widely dispersed and interact less when their opinions are tightly spread. Thecomplexity increases with each model to reflect more realistic behaviour. We obtain manyconvergence results from these models, of which the implications are heavily explored.
3

Contents
1 Acknowledgments 2
2 Abstract 3
3 Introduction 53.1 General Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53.2 Historical Background . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53.3 Opinion Dynamics & Social Learning . . . . . . . . . . . . . . . . . . . . . . . 63.4 Engineering Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.4.1 Swarm Robotics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73.4.2 Problem: Landmine Removal . . . . . . . . . . . . . . . . . . . . . . . 83.4.3 Problem: Forest Fires . . . . . . . . . . . . . . . . . . . . . . . . . . . 83.4.4 Problem: Environmental Concerns . . . . . . . . . . . . . . . . . . . . 8
3.5 Other Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93.5.1 Problem: Load Balancing . . . . . . . . . . . . . . . . . . . . . . . . . 9
4 Problem Description & Approach 10
5 Design & Engineering Models 125.1 Preliminaries . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125.2 Notation and Definitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125.3 Basic Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135.4 Stubborn Agent Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165.5 Communication Radius Model . . . . . . . . . . . . . . . . . . . . . . . . . . 185.6 Random Realization Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
6 Testing & Results 24
7 Discussion 277.1 Application of Models . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
7.1.1 Landmine Removal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 287.1.2 Forest Fires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 297.1.3 Environmental Concerns . . . . . . . . . . . . . . . . . . . . . . . . . . 297.1.4 Load Balancing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
8 Conclusion 318.1 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 318.2 Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
9 References 32
4

3 Introduction
3.1 General Overview
Decentralized agreement problems can be studied by examining the convergence of opinions.In a general setting, the dynamics of a social network can be described by equations of theform:
xt+1 = λxt · P (xt) + wt
Systems of this form have been extensively covered in [3] by Condello. This paper will extendthese results by studying a complex update algorithm which has applications in engineeringand sociology. Most notably, the modelling has significant energy efficiency applications innumerous interaction systems. Leading up to this model, three other systems will also bestudied. The basic model will be introduced to show agreement to the average initial opinionunder certain conditions. The role and implications of stubborn agents will be studied. Theexistence of clusters will be demonstrated by studying a state dependent update algorithmwhich models interaction dynamics through a prescribed interaction radius.
The thesis is formatted as follows:
• In Chapter 4, the problem description will be formulated and the engineering ap-proaches used to solve the problem will be discussed.
• In Chapter 5, some notation and necessary definitions needed in order to understandthe modelling will be introduced. The four aforementioned models will also be exten-sively studied.
• In Chapter 6, the simulated results for each of the four models will be shown.
• In Chapter 7, the results will be discussed along with their relation to many engineeringand sociological applications.
3.2 Historical Background
The study of consensus, agreement and social learning has been present in mathematicaland philosophical literature over recent centuries. In 1788, Marquis de Condorcet provedthat truthful reporting of information by a large group of individuals with each holdingan opinion (correlated to some state θ) is sufficient to the aggregation of information [1].In 1907, Galton advocated the idea that a large group of relatively uninformed individualswould have significantly more information than each individual separately. To defend histheory, he went to a carnival where people were guessing an animal’s mass. He found thatalthough most individuals were completely wrong, the median guess was 1197 pounds (theanimal weighed 1198 pounds). Although Galton’s claim is not true in general, it can beviewed as a foundational constituent in the advancement of social dynamics [2].
More recently, the mathematics developed by J. Hajnal and M. S. Bartlett in the studyof Weak Ergodicity of non-homogenous Markov chains and by J. Wolfowitz in Productsof Indecompasable, Aperiodic, Stochastic Matrices has been foundational to the study ofmany social learning questions [3]. Will social learning lead to a consensus? Will social
5

learning effectively aggregate dispersed information? How can one optimize his/her deci-sions to most effectively spread information? In areas such as coordination and distributedcontrol, it is important to study the consensus processes that a group of agents employ.It is often desirable for a group of agents to reach some sort of agreement and have somecommon knowledge regarding the state of the system [4].
The focus of this project will involve a randomly changing interaction graph. When con-sidering an undirected graph, one may wish to compute the average (or some function) ofthe initial values of the nodes. For example, the DeGroot model uses a weighted average ofthe opinions of the nodes, wherein the weights are the respective trust levels of the agents.Other averaging methods may also be employed. A simple method involves each node ex-changing information with its neighbours using a basic averaging algorithm. Furthermore,under specific connectivity assumptions, one can show that an agreement to the averagevalue will eventually occur.
3.3 Opinion Dynamics & Social Learning
The study of opinion dynamics is important because an individual’s actions are controlledby his/her beliefs. But how do these beliefs actually form? We are certainly not bornwith opinions. Our beliefs are formed by our interactions with our social environment. Forexample, our opinions on politics are dependent on our individual values. We vote on thepolitician who we deem to have our own best interests in mind. We look for a politicianthat is in a sense fair. But what exactly is fairness? It is certainly not the same notion inall of us; otherwise everyone would vote for the same politician. In order to answer suchquestions, the spread of information within a community must be studied [5].
Social learning is the process of updating one’s beliefs as a function of one’s own experiences,others’ experiences, news from media sources, and propaganda from high-level sources. It isimportant to note that even though each individual is updating his/her beliefs as a functionof his/her own opinions, there is an inherent social character to the process. For example,a holistic view of a society may model the learning process like the spread of a virus. Whena group obtains a certain piece of information, they may immediately change their opinionbased on the new information. Another holistic model of social learning would be to exam-ine social circles instead of individuals. For example, one would need to study the mutualexclusivity and independence of such circles in order to determine the interaction propertiesand the associated probability distributions [5].
In order to investigate the conditions and effectiveness of social learning, a number of ques-tions must be investigated. What constitutes a consensus? Whether it be unanimous agree-ment, majority agreement, or just majority consent (i.e. where an individual may allow adecision, but not necessarily actively support it), what are the conditions for a consensusto form? How can we determine the consensus if it does exist? How does uncertainty playa role in the aggregation of information? What are the conditions which guarantee thedispersal of misinformation? The group will attempt to transcribe these basic questions toa mathematical setting in which consensus can actually be proved.
6

3.4 Engineering Applications
There are many engineering applications that involve communication between decentralizedentities. A decentralized system is a system in which multiple agents use their local knowl-edge of a system to make decisions that coincide with the goals of the team. A decentralizedsystem can only achieve the maximum efficiency when the agents reach agreement. Withoutagreement, the agents will undertake tasks redundantly or certain aspects may be outrightomitted. That is why the models developed in this paper all focus on the conditions underwhich the system reaches consensus, with consensus being defined differently for differentsystems. It is also important to note that the agents must agree on certain variables prior tointeracting. For example, in a situation where a group of robots is mapping a plot of land,they must all agree on which direction is north, or else they will produce maps that havedifferent orientations and will never be able to achieve agreement. They must also have thesame notion of agreement so that they are all working towards the same objective.
One type of decentralized system is a sensor network. Sensor networks have many po-tential uses in environmental monitoring programs. For example, sensors could be spreadthroughout forests to monitor for forest fires, or placed in oceans to track algae levels. Thepossibilities are endless, which makes developing smarter models a priority for the advance-ment of sensor networks. There are many different models for the communication betweenthe individual sensors. One such model is detailed in a paper from the Computer ScienceDepartment at the University of California [9]. It details a cluster-based decentralized sys-tem in which the sensors are arranged in clusters and these clusters send their data to a“cluster head” that compiles the data and removes redundant information before sendingthe data to a central location.
3.4.1 Swarm Robotics
One of the main engineering applications of the models developed in this paper is in thefield of swarm robotics. Swarm robotics is when a group of autonomous agents, such asrobots or drones, completes a task by working together and sharing information. Theserobots are all self-controlled and only interact with each other, never interacting with anoutside source. Furthermore, none of the robots have any sense of superiority over any ofthe other robots. This allows the system to be very robust, as the failure of one robot willnot significantly affect the group as a whole. Agents can easily be taken out and added backinto the swarm with little to no disruption to the system. Swarm robotics also has manyapplications for implementation in areas where the conditions are too dangerous for humansto operate. Robots can be programmed to work together to complete tasks that would beof great risk to humans. A few of these tasks will be discussed in the following applications.This illustrates the importance and practicality of studying interactions in a decentralizedsystem.
7

3.4.2 Problem: Landmine Removal
One specific use of swarm robotics is for landmine removal. This is a problem that hasbeen previously studied [13]. There are areas in the world where landmines lie just belowsurface level, a potentially lethal threat to anyone navigating the terrain. These areas areessentially off-limits to everyone except the locals, who know the safe paths through theminefields. Removal of landmines is a two-step process. First, the location of the landminesmust be identified, and secondly, the landmine must be removed from the ground safely. Aswarm robotics network is an ideal way to locate the mines. Theoretically, the swarm couldbe given an area to map, and fly over the area identifying the GPS locations of where minesare located. Following this, the mines could be safely removed by some other means. Sincelandmines are very dangerous, it would insufficient to have a single drone map an area, asthe drone could make an error due to design or due to noise. For that reason, multiple droneswould be needed to map every part of the area to ensure that no errors were made. This iswhere the notion of agreement comes in. For example, say that for a location to be deemed’mapped’, three different drones must observe the location and agree on either the presenceor absence of a mine. If the three drones do not have a consensus on whether or not a mineexists at a certain location, then the area must be observed by more agents to verify thestatus of the location. When the initial observances of a location do not agree, the agentswill need to communicate with other agents that the location requires further inspection.When the initial robots have a consensus, then there is no need for communication to otheragents. The problem is to develop a communication protocol for these drones so that theycan reliably and efficiently find the locations of the mines.
3.4.3 Problem: Forest Fires
Another task that is quite dangerous to humans that can be completed by drones is fightingforest fires. The drones could be equipped with the necessary hardware to fight the fireand deployed into the affected area. If implemented effectively, this method of dealing withforest fires eliminates the need for humans to be anywhere near the fire. In 2013, there were34 fatalities related to fighting forest fires in the United States [10]. Having drones fight thefire could reduce that number. Drones could also be equipped with sensors that provide dataon conditions of the fire that humans cannot perceive. This data could potentially makethe drones more effective fire fighters than humans could ever be. However, for the dronesto be able to extinguish or contain the fire, they would need an appropriate communicationsystem.
3.4.4 Problem: Environmental Concerns
One of the main uses for swarm robotics is the mapping/exploration of various terrains.There are many scenarios where it would be advantageous to use robots to map a terrain,such as mapping the sea floor. Depending on the type of robot and the type of terrain thatis being mapped, there are also many environmental issues that must be considered. Forexample, say there is a mapping task that could be completed by humans with a high rate ofaccuracy and no damage to the environment at all. This may take a long time and could be
8

very expensive. Conversely, the same task could be completed by drones in a much shortertime and at a lower cost, but the drones may only achieve the same rate of accuracy as thehumans if each area was mapped by multiple drones. Additionally, when the drones map anarea, they may slightly damage the environment as well. If it is decided that the area is tobe mapped by drones, it is preferable to have the drones map the location as efficiently aspossible with minimal redundancy. The communication model for the robots must thereforeprevent excess trips over a location to minimize environmental damage.
3.5 Other Applications
3.5.1 Problem: Load Balancing
In addition to swarm robotics, there are many other potential applications for the developedmodels, and decentralized systems in general. Load balancing, sensor networks and com-puter networks are engineering applications in which the models developed are applicable.One particular application is load balancing over wireless networks [8]. The idea is to createthe fastest speeds for everyone who is using a device connected to the same network at anygiven time. As the amount of usage fluctuates between areas, the system must be able toadapt to handle more or less of the load. All parts of the network need to communicate witheach other to identify which areas have the largest usage, and which areas have relativelylow usage.
9

4 Problem Description & Approach
We wish to study agreement in decentralized systems, in particular by treating it as aconvergence problem and studying convergence under various conditions. The opinions ofagents in a typical decentralized system are constantly evolving over time. By examiningthe conditions under which these agents interact, we are able to model these systems andobserve their behaviour in the limit as time goes to infinity. In this paper we will go intodepth on four interaction models to prove and make conclusions about their convergencebehaviour.
We approached the problem by formulating four distinct interaction settings which wechose to model. We will refer to the first interaction model from here on as the basicmodel. The basic model allowed for us to achieve a general understanding of the problemand how opinions changed over time. In this model, each agent interacts with every otheragent at every time step, and updates their opinion based on these interactions. An evenweighting is applied to each of these interactions, but a higher weighting is assigned to eachindividual’s own opinion. The opinions of agents evolve by taking the weighted averageof their own opinion and the opinions of the agents with which they interact. An issuewe found with this model is that it operates under an idealistic setting and is thus fairlyunrealistic. However, it provided a good starting point to build on for the rest of our models.
The second model introduces stubborn agents and is aptly named the stubborn agentmodel. Stubborn agents are agents whose opinions remain static overtime and do notevolve after interaction with other agents. The normal agents in this model function simi-larly to the basic model except now additional distinct weightings are assigned to each of thestubborn agents present in the model. The normal agents still interact with all other agents,including stubborn agents, at each time step. We expect that agreement is not generallyachieved in a model that involves multiple stubborn agents with distinct opinions.
The two models discussed up to this point have involved state independent interactionsettings. To create a more practical model, we incorporated state dependence into thedynamics of our model. In reality, individuals do not just talk to the same set of peopleconstantly. As opinions change, people begin to explore new areas and meet new people.This led us to the creation of the first state dependent model, called the communicationradius model. In this model, agents no longer communicate with all other agents at eachtime step. We introduce a fixed opinion radius that will define which agents communicatewith each other at each time step. For a particular agent, only agents who have an opinionthat falls within the opinion radius around his own opinion will communicate with him. Thisis a more realistic model that incorporates the fact that agents are likely to only interactwith other agents whom share a similar opinion. The issue with this model is that clustersof opinions form over time, and thus general consensus is not achieved. After clusters form,this results in individuals only communicating with other agents that have the exact sameasymptotic opinions as themselves. The next step we took in our solution process was toimprove upon this state dependent model to reflect more realistic interaction behaviour byincorporating randomness.
The final and most complex model was motivated by a new notion of convergence calledstochastic agreement as presented by Condello’s [12]. It is a random model that allows for
10

stochastic agreement which we call the random realization model. We came up withthis model because we wanted to introduce randomness into the interaction dynamics sincereal interactions are not perfect. In this model, we define multiple distinct possible realiza-tions of interaction possibilities at each time step. Each of these realizations is assigned aprobability depending on the current spread of opinions among agents at each time step.Each realization varies by the number of other agents an agent will interact with. Themodel still incorporates state dependence, but the state simply determines the probabilitydistribution on the realizations. If the spread of opinions is large, a realization that hasmore agents communicating has a greater likelihood of being implemented. On the otherhand, if the spread is minimal, a realization with fewer agents communicating has a greaterlikelihood of being implemented. The reasoning behind this is that when opinions are veryspread out, agents in the system will have very different opinions from each other and willwant to communicate more to be able to learn from all these different opinions. When theopinions are all fairly similar, agents will have a lower desire to communicate with eachother because there will be little to learn from interacting with an agent that has a verysimilar opinion to their own. The probability distribution for the realizations is based offof a normal distribution. The center of the distribution (i.e. point of highest probability)is determined by the spread of opinions at any time step as mentioned before. We cameup with this distribution because it was an effective way to distribute the probabilities toaccurately reflect the outcomes we desired based on the opinion spread. After a realization isselected, each agent interact with its closest n number of opinionated neighbours dependingon the realization. Furthermore, to increase the randomness in the model we also appliedindependent and identically distributed stochastic noise to the system.
To study convergence in each of these models, we first came up with the necessary the-ory and definitions needed to mathematically derive the convergence results. Condello’s[12] work presented us with many of the mathematical notions we needed to prove our re-sults. The next step we took was to then mathematically model the interaction dynamics inMATLAB and see if they matched our proven results. The MATLAB simulations workedwell and confirmed the results we had proven for each model.
We worked through this process for each model individually to obtain the desired results.Modelling in MATLAB allowed us to experiment with many different variables and seehow this affected convergence results. We tested the models for anywhere from 5 to 500agents and changed variables such as the opinion radius in the communication radius model,weightings assigned to agents in the stubborn agent model, and probability distributions inthe random realization model. This allowed us to test the robustness of our code and verifythat our convergence results still hold regardless of the variable changes. Most notably, thechanges in variables affected the speed at which convergence was achieved depending on themodel. Rate of convergence is something we wish to study in the future but has not beendiscussed in depth in this paper.
11

5 Design & Engineering Models
5.1 Preliminaries
Let (xt)∞t=1 be a sequence of row vectors where xTt ∈ Rn ∀ t ∈ Z
xt = (x1t x2t . . . xnt )
xt is referred to as the state of opinions at time t. xit is referred to as the opinion of the ith
agent at time t.
The initial value of the state of opinons is assumed to be given as
x0 = (x10 x20 . . . xn0 )
xTt forms a Markov chain on Rn.
5.2 Notation and Definitions
Definition 5.1. The spectrum of a matrix M ∈ Rn×n is given by
λ(M) = {λ|λ is an eigenvalue of M}
Definition 5.2. A matrix M ∈ Rn×n is said to be stochastic ifn∑j=1
Mi,j = 1, Mi,j ≥ 0
Definition 5.3. A matrix M ∈ Rn×n is said to be row stochastic ifn∑i=1
Mi,j = 1, Mi,j ≥ 0
Definition 5.4. A matrix M ∈ Rn×n is said to be doubly stochastic if it is both columnstochastic and row stochastic
n∑j=1
Mi,j =
n∑i=1
Mi,j = 1, Mi,j ≥ 0
Definition 5.5. (Dobrushin’s Ergodic Coefficient) Let P be a finite square matrix. Wedefine the Dobrushin’s Coefficient, denoted δ(P ), by
δ(P ) = mini,j
∑k
min(Pi,k, Pj,k)
Remark. Note that δ(P ) > 0 if and only if, for every two rows, there exists one column forwhich both terms are positive.
Definition 5.6. The average vector associated with x, where xT ∈ Rn is
µ(x) =||x||n
[1 1 · · · 1]
Definition 5.7. Let xt = (x1t x2t . . . xnt ) be the state of opinions at time t, evolving by
some prescribed deterministic transition kernel. Agent i ≤ n is said to be stubborn if
xit+1 = xit = · · · = xio ∀ t > 0, ∀ xTo ∈ Rn
12

5.3 Basic Model
The first model of opinion dynamics studied in this thesis involves transition kernels that aredoublystochastic. The state of opinions at any discrete time t can be found by computingthe product of t doubly stochastic matrices.
Model 1 (Doubly Stochastic Transition Kernel). Let (xt)∞t=0 be a sequence of row vectors
where xTt ∈ Rn ∀ t ∈ Z, evolving by the recursive relationship
xt+1 = xtPt
where (Pt)∞t=0 is a sequence of doubly stochastic matrices, Pt ∈ Mn(R) ∀ t ∈ Z
Pt =
p1,1t p1,2t · · · p1,nt
p2,1t p2,2t · · · p2,nt
......
. . ....
pn,1t pn,2t · · · pn,nt
Let the initial state be given by
x0 = (x10 x20 . . . xn0 )
Next we study a theorem which shows an interesting and integral property of the systemwhen the transition kernel is stochastic: the conservation of the average opinion in theMarkov chain. In any two adjacent states of the model, the distribution of opinions amongthe agents will vary, although the average value of the agents’ opinions will remain constant.
Theorem 5.1. Let P be a row stochastic matrix. Let xt+1 = xtPt. Then the state ofopinions will be average conserving, i.e.
n∑i=1
xit+1 =
n∑i=1
xit = · · · =n∑i=1
xio
Proof.
(x1t+1 x2t+1 . . . xnt+1) = (x1t x
2t . . . xnt )
p1,1t p1,2t · · · p1,nt
p2,1t p2,2t · · · p2,nt
......
. . ....
pn,1t pn,2t · · · pn,nt
Thus xit+1 =
∑nk+1 x
ktPk,i ∀ i ≤ n
Now,
n∑i=1
xit+1 =
n∑i=1
n∑k=1
xktPk,i =
n∑k=1
n∑i=1
xktPk,i =
n∑k=1
xkt
n∑i=1
Pk,i =
n∑k=1
xkt
We now introduce a lemma that will be useful in determining the conditions for theMarkov chain introduced in Model 1 to reach convergence.
13

Lemma 5.2. Let P ∈ Mn(R) be a doubly stochastic matrix. If
δ(P ) = min(i, k)
n∑j=1
min(P (i, j), P (k, j)) > 0
If πT , πT ∈ Rn, where ||π||1 = ||π||1, then
‖πP − πP‖1 ≤ (1− δ(P )) ‖π − π‖1
Another important theorem is introduced, which discusses an essential characteristic ofthe eigenvalues of a stochastic matrix.
Theorem 5.3. Let P ∈ Mn(R) be a stochastic matrix., then max(λ(P )) = 1
Proof. First we will show that 1 ∈ λ(P ), with associated eigenvector [1 1 · · · 1]T
P [1 1 · · · 1]T =
p1,1 p1,2 · · · p1,np2,1 p2,2 · · · p2,n
......
. . ....
pn,1 pn,2 · · · pn,n
11...1
=
p1,1 + p1,2 + · · ·+ p1,np2,1 + p2,2 + · · ·+ p2,n
...pn,1 + pn,2 + · · ·+ pn,n
= 1
11...1
Now we will show that ∀λ ∈ λ(A), λ ≤ 1
If λ ∈ λ(P ) then ∃v ∈ Rn such that Pv = λv.p1,1 p1,2 · · · p1,np2,1 p2,2 · · · p2,n
......
. . ....
pn,1 pn,2 · · · pn,n
v1v2...vn
=
p1,1v1 + p1,2v2 + · · ·+ p1,nvnp2,1v2 + p2,2v2 + · · ·+ p2,nv2
...pn,1v1 + pn,2v2 + · · ·+ pn,nvn
= λ
v1v2...vn
Define j ≤ n such that vj = ‖v‖∞
Thus we have the following:
λvj = pj,1v1 + · · ·+ pj,nvn ≤ (pj,1 + · · ·+ pj,n)vmax = vmax
By the definition of a stochastic matrix, we have that pj,1 + · · ·+ pj,n = 1
Thus λvmax ≤ vmax
which occurs only if λ ≤ 1
14

Of particular interest are the conditions for convergence of the Markov chain describedin Model 1. Further, it is important to also study the conditions for consensus to eventuallyform in the model, i.e for the opinions of all the agents to converge to the same value.Intuitively, the amount of communication between the agents will determine whether or notconsensus is achieved. Finally, we will extend the idea that the average opinion is conservedand show that this is also true in the limit of the sequence. We have now established all thetools necessary to prove the following theorem.
Theorem 5.4. Let (Pt)∞t=0, Pt ∈Mn(R) ∀ t ∈ Z, be a sequence of doubly stochastic matrices.
Let the state of opinion at time t+ 1 be given by
xt+1 = xtPt
with initial opinion x0
If∏∞t=0 (1− δ (Pt)) = 0 then a consensus will be reached in the model, given by
limt→∞
xt =‖x0‖1n
Proof. Let xTt , xTt ∈ Rn where ‖x0‖ = ‖x0‖
The states of each opinion at time t are then given by:
xt+1 = xtPt
xt+1 = xtPt
These opinions are equivalently given by
xt = x0
t−1∏k=0
Pk
xt = x0
t−1∏k=0
Pk
We can then write
‖xt − xt‖1 =
∥∥∥∥∥x0t−1∏k=0
Pk − x0t−1∏k=0
Pk
∥∥∥∥∥1
=
∥∥∥∥∥(x0
t−2∏k=0
Pk)Pt − (x0
t−2∏k=0
Pk)Pt
∥∥∥∥∥1
≤ (1− δ (Pt))
∥∥∥∥∥(x0
t−2∏k=0
Pk)− (x0
t−2∏k=0
Pk)
∥∥∥∥∥1
...
≤t−1∏k=0
(1− δ(Pk)) ‖x0 − x0‖1
15

Taking limits of both sides of the inequality yields
limt→∞
‖xt − xt‖1 ≤∞∏k=0
(1− δ(Pk)) ‖x0 − x0‖1 = 0
Thus both sequences of opinions have equal limits
limt→∞
xt = limt→∞
xt
Now let xt be an arbitrary state of opinion at time t with initial condition x0.
xt+1 = xtPt
Let x′t be the state of opinion at time t with initial condition x′0 = ‖x0‖n [1 1 · · · 1]
x′t+1 = x′tPt
Note that ‖x0‖ = ‖x′0‖, thus by the above result limt→∞ xt = limt→∞ x′t
We can write x′t as follows
x′t = x′0
t−1∏k=0
Pk =‖x0‖n
[1 1 · · · 1]
t−1∏k=0
Pk
Note that the row vector [1 1 · · · 1] is an eigenvector for every stochastic matrix withassociated eigenvalue 1.
=‖x0‖n
[1 1 · · · 1](1t−1) =‖x0‖n
[1 1 · · · 1]
Thus
limt→∞
xt = limt→∞
x′t =‖x0‖n
[1 1 · · · 1]
This concludes our discussion of the model with doubly stochastic transition kernels.We have proven that in a network with full sufficient communication between agents, theopinions will converge to the average of the initial opinions of all agents. We now investigatea model which incorporates stubborn agents, whose opinions are static and not affected byother agents in the model. Stubborn agents are able to affect the opinions of non-stubbornagents in the system. The following model involves a stationary transition matrix which iscolumn stochastic. Some new machinery will need to be introduced in order to prove theconvergence result for this model.
5.4 Stubborn Agent Model
Model 2 (Stubborn Agents). Let (xt)∞t=0 be a sequence of row vectors where xTt ∈ Rn ∀
t ∈ Z, evolving by the recursive relationship
xt+1 = xtP
16

Let agents 1, 2, · · · ,m be stubborn, and let the transition kernel, (Pt)∞t=0, Pt ∈ Mn(R), be
column stochastic and given by
P =
1 a1 · · · a1. . .
......
...1 am . . . am
pm+1,m+1 · · · pm+1,n
.... . .
...pn,m+1 · · · pn,n
where a1, ..., am > 0, and pm+i,m+j, where i, j ≤ n, are chosen to satisfy the definition of acolumn stochastic matrix.
In a model with multiple stubborn agents, it is not expected that consensus will bereached since the stubborn agents’ opinions remain constant and will, in general, neveragree with each other. However, consensus will be achieved by the subset of non-stubbornagents whereby they will converge to a convex combination of the stubborn agents’ opinions.
Theorem 5.5. Let (xt)∞t=0 evolve according to the relationship prescribed in model 2. Then
the opinions of the stubborn agents will remain constant and the opinions of the n − mnon-stubborn agents will converge to a convex combination of the opinions of the stubbornagents. In particular, the state vector will converge to
limt→∞
xt = (x10 x20 · · · xm0 (
a1x10 + a2x
20 + · · ·+ amx
m0
a1 + a2 + · · ·+ am) · · · (
a1x10 + a2x
20 + · · ·+ amx
m0
a1 + a2 + · · ·+ am))
Proof. First we will show that limt→∞ xt exists:
xt = x0Pt
P can be decomposed into Jordan Normal Form: P = ΛJΛ−1 where
J =
1. . .
1Jm+1,m+1
. . .
Jn,n
Exponentiating the matrix J to a power of t ∈ N yields
J t =
1. . .
1J tm+1,m+1
. . .
J tn,n
17

Since the eigenvalues associated with Jordan blocks Jm+1,m+1, ..., Jn,n are strictly less than1, it follows that
limt→∞
J tm+1,m+1 = ... = limt→∞
J tn,n = 0
This implies that
limt→∞
J t =
1. . .
10
. . .
0
Thus
limt→∞
xt = x0 limt→∞
P t = x0 limt→∞
ΛJ tΛ−1 = x0Λ( limt→∞
J t)Λ−1
= x0Λ
1. . .
10
. . .
0
Λ−1
limt→∞ xt will solve the equation limt→∞ xt = limt→∞ xtP .Explicitly solving this yields:
limt→∞
xt = [x10 x20 · · · xm0 (
a1x10 + a2x
20 + · · ·+ amx
m0
a1 + a2 + · · ·+ am) · · · (
a1x10 + a2x
20 + · · ·+ amx
m0
a1 + a2 + · · ·+ am)].
We have thus proven that in the stubborn agent model, the opinions of the normal agentswill converge to a weighted average of the opinions of the stubborn agents. In networkswith more than one stubborn agent, overall consensus is generally not achieved because thestubborn agents’ opinions will not change over time.
5.5 Communication Radius Model
We now introduce the first state-dependent model in our thesis, where the transition kernelis an explicit function of the state variable, xt. This model is based off of practical opiniondynamics applications as two agents will communicate if and only if the ”distance” betweentheir opinions is within a certain fixed radius.
Model 3 (Communication Radius). Let (xt)∞t=0 be a sequence of row vectors where xTt ∈
Rn ∀ t ∈ Z, evolving by the recursive relationship
xt+1 = xtP (xt)
18

where P : Rn →Mn(R) is given by
pi,j(xt) =
{ai,j > 0, if |xi − xj | < r
0, if |xi − xj | ≥ r
where r > 0 and ai,j are chosen so that P (xt) will be column stochastic. Note that this willalways be true since |xi − xi| = 0 < r.
We now show that the communication radius model does not lead to consensus in general,and that clusters of opinions may form under the dynamics specified in the model.
Theorem 5.6. Let (xt)∞t=0 evolve according to the relationship outlined in Model 3. There
exists x0 ∈ Rn such that no consensus will be reached in the model, i.e.
limt→∞
xt 6= a(1 1 · · · 1), a ∈ R
Proof. For any given r > 0, choose x0 such that |xi0 − xj0| > r for i 6= j. Thus
pi,j(xt) =
{1, if i = j
0, if i 6= j
This will yieldlimt→∞
xt = a(x10 · · ·xn0 )
Clusters of opinions will likely form in this model where groups of agents will each con-verge to a different opinion. Thus, in general this model does not lead to overall consensus.
5.6 Random Realization Model
We now move to study the convergence of opinions with the addition of independent andidentically distributed stochastic noise. In order to study such a problem, we must introducea new notions of convergence: Stochastic agreement. Stochastic agreement and will allowus to study noisy, possibly state-dependent agreement processes. We are interested in de-termining if a process has a bounded expected return time. Before we can precisely discussthis further, some preliminary definitions are required. The Foster-Lyapunov Criteria forstability of Markov chains will be heavily used in studying such systems. We wish to studythe stability of a Markov chain evolving with symmetric noise. In particular, we wish toensure that all entries of the state vector return infinitely often to some consensus set. Thiswill be made precise.
Definition 5.8. (Stochastic Agreement: Condello 2013) Let {xt}{t≥0} be a sequence ofrandom variables taking values in Rn. We define a consensus set, ΓA by
ΓA = {x : ||x− µ(x)||1 ≤ A}
for some A ∈ R. Let us define a sequence of stopping times for a process xt by:
τz+1 = min(t ≥ τz : xt ∈ ΓA)
19

with τ0 = 0. We say that the process achieves stochastic agreement if
supzE[τz+1 − τz|Fτz ] <∞
and ∀x ∈ RnPx(min(t ≥ 0 : xt ∈ ΓA)) = 1
That is, xt will almost surely return to the consensus set in finite time.
Definition 5.9. (Stochastic Absolute Agreement: Condello 2013) Let {xt}{t≥0} be a se-quence of random variables taking values in Rn. We define a consensus set, Γ by
Γ = {x : ||x||1 ≤ C}
for some C ∈ R. Let us define a sequence of stopping times for a process xt by:
τz+1 = min(t ≥ τz : xt ∈ Γ)
with τ0 = 0. We say that the process achieves stochastic absolute agreement if
supzE[τz+1 − τz|Fτz ]
and ∀x ∈ RnPx(min(t ≥ 0 : xt ∈ ΓA) <∞) = 1
That is, xt will almost surely return to a consensus set containing the origin.
Remark. Note that stochastic agreement means that the process has a bounded expectedreturn time to an agreement set ΓA. Stochastic absolute agreement is identical except theagreement set must contain the origin. Note that stochastic absolute agreement is a strongernotion than stochastic agreement and therefore the former implies the latter.
The conditions under which these definitions of agreement are met will now be studied. Inparticular, the criterion for stability in noisy chains is necessary in order to study recurrence.
Theorem 5.7. (Foster-Lyapunov Criteria for Stability of Markov Chains) Let xt be a ψ-irreducible Markov chain. Let V : X → R; ε ≥ 0; b ≤ ∞ and S be a small set. If
E[V (xt+1)|xt = x] ≤ V (x)− ε+ b1{x∈S}
then {xt} is positive Harris recurrent.
We are now well equipped to study the problem of agreement in a stochastic, statedependent system. The engineering model we shall consider is one in which an arbitrarynumber of agents interact and each agent only interacts with some subset of the agentswhose opinions are closest to themselves. The system will be state dependent in the sensethat there will be different realizations of the probability transition kernel at each time stage.A natural probability distribution on the possible realizations of the transition kernel willemerge. In order to minimize communication costs, agents should interact more often whentheir opinions are widely dispersed and interact less often when their opinions are close.
20

Definition 5.10. (Neighbouring agents) Let {xt} be a Markov Chain evolving according toa state dependent probability transition kernel P . Let there exist n− 1 possible realizationsof P , namely {Pi}, 1 ≤ i ≤ n− 1, at each time step. Let xt denote a sorted state vector inthe sense of magnitude i.e, the vector has sorted xt from smallest to greatest . For Pi, wherei = odd, we say that the ath agent is a neighbour of the bth agent if the following conditionsis met:
a ∈ {j : xb−(i−1)/2 ≤ xj ≤ xb+(i−1)/2}
For Pi, where i = even, we say that the ath agent is a neighbour of the bth agent if thefollowing conditions is met:
a ∈ {j : xb−i/2+1 ≤ xj ≤ xb+i/2}
We also say that each agent is a neighbour of themselves.
Remark. For a realization Pi with i = odd, each agent chooses themselves and their closest
opinionatedi− 1
2agents to the right in xt and their closest opinionated
i− 1
2agents to
the left in xt. If i = even, the agent would proceed with a similar process except he wouldadditionally choose an extra agent i/2 entries to the right of himself in xt. Our definitionensures that each agent has exactly i neighbours for any realization of Pi. The examplebelow illustrates the process of determining an agent’s neighbours.
Example: Consider a group of four agents (n = 4). Using the algorithm written in Definition5.10, calculate Pi, ∀ 1 ≤ i ≤ n − 1 at some t = t0. Suppose the opinions of the agents att = t0 are x1 = 3, x2 = 9, x3 = 5, x4 = 1. The opinion vector is:
xt0 = [x1 x2 x3 x4]
and the sorted state vector is:xt0 = [x4 x1 x3 x2].
Then the possible realizations of the state transition kernel are:
P1 =
1 0 0 00 1 0 00 0 1 00 0 0 1
P2 =
1/2 0 1/2 00 1/2 0 1/20 1/2 1/2 0
1/2 0 0 1/2
P3 =
1/3 0 1/3 1/30 1/3 1/3 1/3
1/3 1/3 1/3 01/3 1/3 0 1/3
Definition 5.11. (Realization Distribution) Let {xt} be a Markov Chain evolving accordingto a state dependent probability transition kernel P . Let there exist n−1 possible realizationsof P , namely {Pi}, 0 ≤ i ≤ n − 1, at each time step. Define αi = Pr
(Pi = P
). Write
21

x1, · · · , xn as the entries of the state vector xt. Let the variables σt and µt denote thestandard deviation and average of this data set, respectively. That is:
µt =1
n
n∑i=1
xi
σt =
√√√√ 1
n
n∑i=1
(xi − µ)2)
Now consider the function ft : R→ R defined as:
f(σt) = e−σt
Note that the Im(ft) = (0, 1) ∈ R. Also note that as σt → ∞ we have that ft → 0. Onecould partition Im(f) into n− 1 equal subintervals. In particular, we may write:
Im(f) = [0,1
n− 1) ∪ [
1
n− 1,
2
n− 1) ∪ · · · ∪ [
n− 3
n− 1,n− 2
n− 1) ∪ [
n− 2
n− 1,n− 1
n− 1].
We say that Pd has a dominated occurrence if f(σ) ∈ [n− (d+ 1)
n− 1,n− dn− 1
). Let now βd
be the associated probability of occurrence of Pi. An explicit formula for calculating βj ,∀jis:
βj = p|d−j|+1
Note that the beta-distribution fully characterizes the probabilities of occurrence of thepossible realizations of P. To find αi,∀i we can simply normalize:
αi =βj∑n−1k=1 βk
With this discussion, Pr(Pi = P
)is known.
Remark. Definition 5.11 is motivated by a cost reduction phenomena. In particular, theagents interact more when their opinions are widely dispersed and interact less when theiropinions are similar. We proceed by investigating the agreement properties of such a randomrealization model. In order to ascertain conditions for agreement properties, we first statethe following theorem by Condello. For the proof of this theorem, refer to [12].
Theorem 5.8. (Condello 2013) If ∀xt, Ext[δ(F (Xt))] > α for some α > 0, every realization
of F (Xt) is doubly stochastic almost surely ∀x, then Xt achieves Stochastic Agreement.
Theorem 5.9. (Neighboring Agreement with i.i.d Noise) Let {xt} be a Markov Chain evolv-ing according to a state dependent probability transition kernel P . Let there exist n − 1possible realizations of P , namely {Pi}, 0 ≤ i ≤ n − 1, at each time step. Suppose thatPr(Pi = P
)= αi and αi is chosen according to Definition 5.11. Suppose further that Pi is
the realization where each agent shares 1/ith of its opinion with its closest i neighbours (ByDefinition 5.10). The evolution of the state can be written as:
xt+1 = xtP (xt) + wt
where {wt} is an i.i.d noise process.
Then under these conditions xt achieves stochastic agreement.
22

Proof. Note that when n = even, δ(Pi) > 0 for every i ≥ n
2and when n = odd, δ(Pi) > 0
for every i ≥ n+ 1
2. By the definition of the realization distribution, αi, we have that
any realization of P occurs with nonzero probability (bounded below). Therefore, for everyxt, E[δ(P (xt)] > β for some β > 0. Further, since every possible realization of P (xt) atany time stage is doubly stochastic, we have that P (xt) is doubly stochastic for all xt. Theresult follows by Theorem 5.8.
The random realization model achieves stochastic agreement while incorporating ran-domness into the network. This is the most complex model we have studied and is the mostpractical model of the four. Explicit simulated results for all four models will be presentedin the following section with MATLAB plots.
23

6 Testing & Results
Below are the testing results produced in MATLAB for the models previously described.
Figure 1 shows the convergence of a finite number of agents that update their opinionsbased on interactions with all the other agents in the network. The agents converge to anopinion that is the average of the initial opinions.
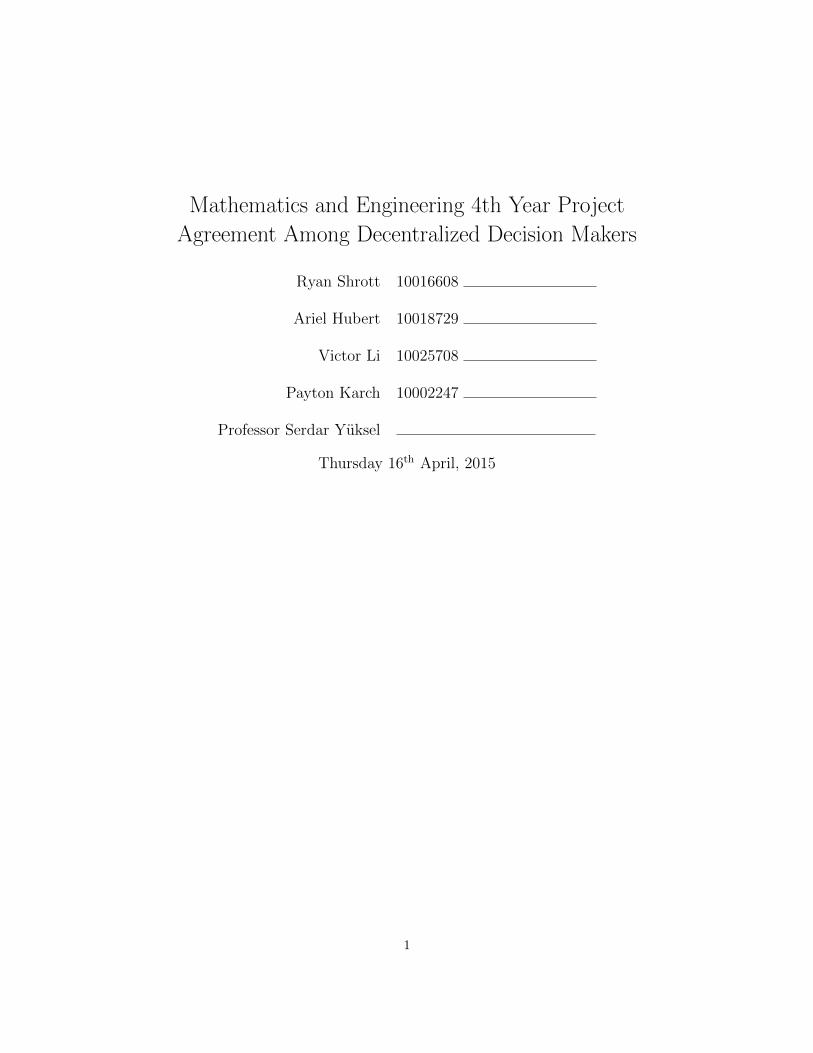
Figure 2 shows a stubborn agent model with two stubborn agents. The two stubbornagent opinions are clear on the graph as the constant lines. All the agents converge to anopinion that is a convex combination of the initial opinions of the two stubborn agents.
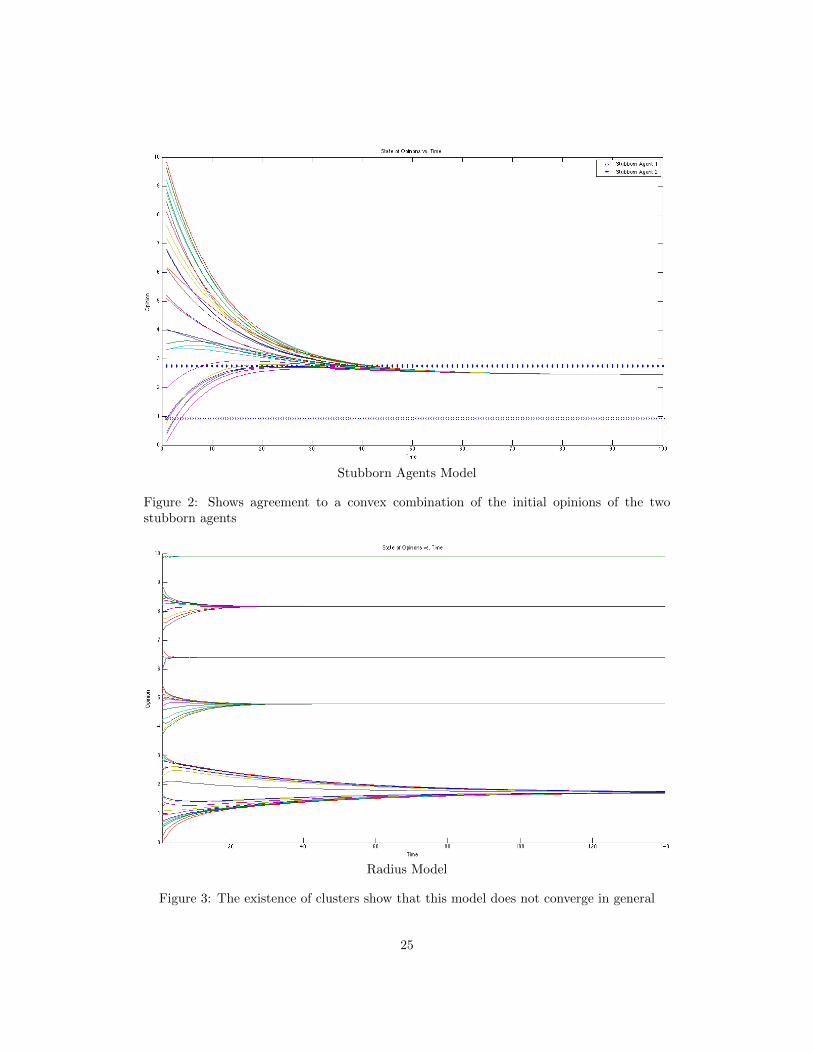
Figure 3 demonstrates the formation of opinion clusters in the communication radius model.All the agents within a certain cluster will converge to a single opinion. General consensusis not achieved.
Figure 4 shows the stochastic agreement of a finite number of agents in the random re-alization model. The random noise incorporated into the model is made obvious on theMATLAB plot. The average opinion at each time step is tracked by the line of circles. Notethat the average opinion is constantly changing, but all the agents maintain opinions aroundthe average. This demonstrates stochastic agreement.
Basic Model
Figure 1: Shows agreement to the average initial opinion
24
Stubborn Agents Model
Figure 2: Shows agreement to a convex combination of the initial opinions of the twostubborn agents
Radius Model
Figure 3: The existence of clusters show that this model does not converge in general
25

Random Realization Model
Figure 4: Shows stochastic agreement
26

7 Discussion
We have looked at four key interaction models and have studied the convergence of opinionsin each model, both in the sense of approaching the same opinion in the limit and in thesense of stochastic agreement. The results presented in the previous section from our MAT-LAB simulations demonstrate the conditions under which opinions will converge, and whatthey converge to. A conclusion based on our results in each interaction model can be ap-plied to many real life interaction dynamics, which will be made explicit later in this section.
In the basic model, we examined an interaction model in which all agents communicatesufficiently. A first result that we have proved mathematically in this model is that theopinions converge to the average of all the initial opinions of the agents. This is a veryidealistic and crude result, but can still be applied generally. In a society where individualstrust each other equally and continuously communicate, each individual will tend to havetheir opinion influenced equally by all the other individuals. This results in an overall con-vergence of each individual to the average of all the opinions. The average was conservedin our model, so the average of all the opinions in the initial state is exactly the average ofthe opinions at all other time steps as well.
In the stubborn agent model, a key result we proved is that in interaction settings involvingagents whose opinions are static, the opinions will gradually converge to a weighted averageof the stubborn agents’ opinions. The stubborn agents in this model communicated withall other agents and thus are a constant source of influence on the other agents’ opinions.One can thus conclude that stubborn agents with widespread communication play a verystrong role and can heavily influence others in a society. This is particularly important whenhandling misinformation. If a network involves a single stubborn agent that is misinformed,eventually all agents in the network will acquire the same misinformed opinion. Therefore,when dealing with stubborn agents it is of great importance to ensure that they are correctlyinformed.
The communication radius model presented the possibility of clusters of opinions forming.The agents, in general, do not converge to the same opinion, but rather we have clusters ofagents each converging to a distinct opinion. The purpose of this model is to better reflectreal life interaction dynamics where agents will not necessarily be able to communicate withall the agents in a society due to geographic, social, or financial barriers. We created amodel where agents only interact with other agents whom shared a similar opinion to theirown. In society, this interaction model can be exemplified by a country with multiple states.Due to geographical barriers, individuals in different states will most likely not communicatewith each other. Within a certain state there may be full communication and thus, as in thebasic model, the opinions will converge to the average of all the opinions. It is then possiblefor clusters of opinions to form for each state. There is convergence to an opinion withinthe states, but as a whole, there is no general consensus of opinions across the states.
Finally, in the random realization model we introduced noise and the notion of stochas-tic agreement. This is more representative of real scenarios since networks are not perfectin practice. In this model, the number of agents that each individual communicates withis selected randomly based on a state dependent probability distribution. The average ofthe opinions at any point in time will tend to fluctuate due to the added noise, however,
27

it is still clearly observed in Figure 4 that the opinions will tend to stay around the av-erage at any point in time. This model is representative of hive mentality in society. Ina society, the average opinion of individuals will indeed fluctuate over time, but there aremany individuals that will conform to the average. At the very least, individuals will havea tendency to not stray too far off from the norm. This particular notion of hive mentalityis observed both in natural and artificial settings. In particular, hive mentality is observedin swarms of animals, such as bees or ants. Artificially, hive mentality can be observed inswarm robotics which is one of the most important engineering applications of the studyof agreement among decentralized decision makers. The minds of humans actually functionvery similarly to a swarm of animals. In the mind of a human, instead of individual bees,we have individual neurons collectively collaborating and eventually reaching a consensusresulting in an action to be executed [11]. This observation is significant in linking theresults thus proven to important sociological outcomes.
In a sociological setting, the study of opinions and the convergence of those opinions isimportant to determine an optimal action for a given situation. In a stubborn agent exam-ple, if it is known beforehand that the intentions of the single stubborn agent are malicious,then it could be prematurely decided that the other agents should not interact with thestubborn agents. We know that given a single stubborn agent, the opinions of all agentsin the system will eventually converge to the stubborn agent’s opinion, provided that allagents communicate with each other. Therefore, we try to cut off the malicious agent inadvance before it can spread its opinion to other agents.
In an economical setting, spending and market trends are very much influenced by pop-ular opinion and can thus be forecasted and predicted. For example, being able to forecastthe shift of consumer preferences can give a retailer a huge advantage in being able to meetthe needs of consumers much earlier than its competitors. These shifts can be predictedthrough big data analytics and the study of how preferences converge over time.
7.1 Application of Models
In the design section of the report, problems were introduced that were considered whencreating the models. This section discusses the application of the models and results proventhus far to solve these problems.
7.1.1 Landmine Removal
The problem of landmine removal was introduced in Section 3.4.2. The random realizationmodel can be applied to this model to generate an effective solution to the problem. Asdiscussed in the random realization model, when the agents are closer to agreement they areless likely to communicate with a large number of agents, and when the agents are fartheraway from agreement, they are more likely to communicate with a large number of agents.The benefit of this model is the reduced communications between the agents when they areclose to agreement. When the agents are far apart from agreement, there will likely be morecommunication between them, resulting in a rapid convergence to a state where the agents
28

are at least almost in agreement. With the agents communicating less when they are closeto agreement, the communication costs for the system will be reduced and the amount ofpower used by the drones will decrease as a result. The drones will be able to run longer,or have the capacity to be equipped with more sophisticated surveying technology. Therandom realization model would be a robust model to use for the communication protocolof a team of drones who are removing landmines because they could be equipped with bettersensors to locate the landmines.
7.1.2 Forest Fires
The problem of fighting forest fires was introduced in Section 3.4.3. The radius model couldbe applied in swarm robotics as the communication system for the robots in this situation.The robots could identify the location of fire hotspots and then communicate this informa-tion to the nearby robots, which could then converge and aid in putting out the hotspot.The robots would cluster around the hotspot at the same time other robots clustered aroundother hotspots. Clusters would form based on whichever robots were closest to the hotspots.This model would be effective because many different hotspots could be dealt with at thesame time.
7.1.3 Environmental Concerns
The problem of environmental damage was introduced in Section 3.4.4. One concern withswarm robotics is that the drones will damage the terrain that they are traversing. Therandom realization model described in this paper would prevent observation redundancy.When there is disagreement about a location, there will be more communication betweenthe agents and more agents will observe an area. Conversely, when there is agreement, therewill be less communication and no more agents will observe an area. This would preventthe drones from damaging the environment more than necessary.
7.1.4 Load Balancing
The problem of load balancing was introduced in Section 3.5.1.The random realization modeldeveloped could be applied to a load balancing system by establishing a notion of agreementdefined as when a section of the network has a similar load to the surrounding sections ofthe network. If there is a large difference between portions of the network, the network willcommunicate more often to balance the load between areas of the network. For example,if there was an event with a large number of people using wireless electronic devices, thenetwork in close physical proximity to the event would see a large increase in traffic. Thiswould result in an increase in communication among the areas of the network surround-ing the event, and the load would ripple outwards from the event until it was more evenlydistributed. All of this would happen very quickly, with users experiencing little to no lagin the system. When the load is evenly distributed throughout the network, the networkwill communicate very little, only monitoring the loads across the network in case of a load
29

spike that needs to be balanced across the network. The load balancing system described,like most decentralized systems, would be robust against failures in the network because if acertain portion of the network was to fail the load could easily be redistributed throughoutthe network. By the same principle, it would be easy to expand the network and integratenew sections into the network.
30

8 Conclusion
8.1 Summary
Our thesis first began at investigating opinion dynamics systems with constant, doublystochastic transition kernels, which preserved the average opinion in the system. A generalresult was shown which provided a condition for consensus in the system. The model thenevolved to incorporate stubborn agents, whom do not update their opinions, but are able toinfluence the opinions of non-stubborn agents in the system. Further complexity was addedto our system by investigating a system with a state dependent transition kernel, whereagents only communicate with other agents with whom they have similar opinions. Thismodel was introduced to demonstrate the dynamics under which clusters of opinions mayform. The final model introduced in this thesis is the Random Realization model, whichis non-deterministic, incorporates i.i.d Gaussian noise and is state dependent. This modelwas motivated by the practical engineering applications discussed earlier. The dynamics forthis model were designed to minimize the amount of communication between agents, yetstill ensure that the opinions of the agents remain stable and do not deviate greatly formthe average opinion.
8.2 Future Work
In practice, decisions must be made in finite time. Most forms of consensus and convergencediscussed in this model are asymptotic. However, it would be useful to study the rates ofconvergence in the various models, and to provide some type of measure on the differencesbetween agents’ opinions at each time. Further, it would be useful to aim to design a systemwhich converges quickly, especially from an engineering point of view. Surely, with increasedrate of convergence, there would need to be increased amount of communication betweenagents. It would be necessary to evaluate this trade off if this problem was studied in thefuture.
This thesis only studied models of opinion dynamics that were strictly non-Bayesian. An-other area of future study is to form models for opinion dynamics that are governed byBayesian probability theory. In a Bayesian model, all agents would be perfectly rationaland each have a complete probabilistic model based on past events that took place in thesystem. In reality, humans are not perfectly rational, and thus do not operate under thedynamics prescribed by Baye’s. Studying a hybrid between the systems proposed in thisthesis and Bayesian models would also be of interest and could provide a better model forhuman interactions.
31

9 References
[1] Schell, Barbara A Boyt (2007). Clinical And Professional Reasoning in OccupationalTherapy. Lippincott Williams and Wilkins. p. 372. ISBN 0-7817-5914-5
[2] Nndb.com, ’Marquis de Condorcet’, 2014. [Online]. Available:http://www.nndb.com/people/882/000093603/. [Accessed: 03- Oct- 2014].
[3] J. Wolfowitz, ”Products of indecomposable aperiodic stochastic matrices”, Proc. Am.Math. Soc., vol.15, pp. 733-736, 1963
[4] J. Hajnal, ”Weak ergodicity in non-homogeneous Markov chains”, Proc. CambridgePhilos. Soc., vol.54, pp. 233-247, 1958.
[5]D. Acemoglu and A. Ozdaglar, ”Opinion Dynamics and Learning in Social Networks”,Dynamic Games and Applications, vol.1, no.1, 2011.
[6] Mathworld.wolfram.com, ’Doubly Stochastic Matrix – from Wolfram MathWorld’, 2014.[Online]. Available:http://mathworld.wolfram.com/DoublyStochasticMatrix.html. [Accessed: 03- Oct- 2014].
[7] M. DeGroot, ’Reaching a consensus’, Journal of the American Statistical Association,vol. 69, no. 345, pp. 118–121, 1974.
[8] Oddi, Guido; Pietrabissa, Antonio; Priscoli, Francesco Delli; Suraci, Vincenzo, ”A decen-tralized load balancing algorithm for heterogeneous wireless access networks,” WTC 2014;World Telecommunications Congress 2014; Proceedings of , vol., no., pp.1,6, 1-3 June 2014.
[9] N. Amini, A. Vahdatpour, W. Xu, M. Gerla and M. Sarrafzadeh, ’Cluster size opti-mization in sensor networks with decentralized cluster-based protocols’, Computer Commu-nications, vol. 35, no. 2, pp. 207-220, 2012.
[10] National Interagency Fire Center, ’Wildland Fire Fatalities by Year’, 2014.
[11] J. Castro, ’You Have a Hive Mind’, Scientificamerican.com, 2015. [Online]. Avail-able: http://www.scientificamerican.com/article/you-have-a-hive-mind/. [Accessed: 05-Apr- 2015].
[12] A. Condello, Stability of Agreement in State-Dependent Interaction Environments, 1sted. Kingston: Queen’s University Department of Mathematics and Statistics, 2013.
[13] Kumar, V.; Sahin, F., ”Cognitive maps in swarm robots for the mine detection ap-plication,” Systems, Man and Cybernetics, 2003. IEEE International Conference on , vol.4,no., pp.3364,3369 vol.4, 5-8 Oct. 2003.
32