ai in game (iv) oct. 11, 2006. so far artificial intelligence: a modern approach –stuart russell...
TRANSCRIPT
AI in game (IV)
Oct. 11, 2006

So far
• Artificial Intelligence: A Modern Approach– Stuart Russell and Peter Norvig– Prentice Hall, 2nd ed.
– Chapter 1: AI taxonomy– Chapter 2: agents– Chapter 3: uninformed search– Chapter 4: informed search

From now on
• Artificial Intelligence: A Modern Approach– Chapter 4. – Chapter 6: adversarial search
• Network part
• Learning (maybe from the same textbook)
• Game AI techniques

Outline
• Ch 4. informed search– Online search
• Ch 6. adversarial search– Optimal decisions– α-β pruning– Imperfect, real-time decisions

Offline search vs. online search
• Offline search agents– Compute a solution before setting foot in the
real world
• Online search agents– Interleave computation and action
• E.g. takes an action and then observes environments and then computes the next action
– Necessary for an exploration problem• States and actions are unknown• E.g. robot in a new building, or labyrinth
–

online search problems• Agents are assumed to know only
– Actions(s): returns a list of actions allowed in states– c(s,a,s’): this step-cost cannot be used until the agent knows that
s’ is the outcome– Goal-test(s)
• The agent cannot access the successors of a state except by actually trying all the actions in that state
• Assumptions– The agent can recognize a state that it has visited before– Actions are deterministic– Optionally, an admissible heuristic function

online search problems• If some actions are irreversible, the agent may reach a
dead end
• If some goal state is reachable from every reachable state, the state space is “safely explorable”

online search agents• Online algorithm can expand only a node that it physically
occupies– Offline algorithms can expand any node in fringe
• Same principle as DFS

Online DFSfunction ONLINE_DFS-AGENT(s’) return an action
input: s’, a percept identifying current statestatic: result, a table of the next state, indexed by action and state, initially empty unexplored, a stack that lists, for each visited state, the action not yet tried unbacktracked, a stack that lists, for each visited state, the predecessor states
to which the agent has not yet backtracked s, a, the previous state and action, initially null
if GOAL-TEST(s’) then return stopif s’ is a new state then unexplored[s’] ACTIONS(s’)if s is not null then do
result[a,s] s’add s to the front of unbackedtracked[s’]
if unexplored[s’] is empty thenif unbacktracked[s’] is empty then return stopelse a an action b such that result[b, s’]=POP(unbacktracked[s’])
else a POP(unexplored[s’])s s’return a

Online DFS, example• Assume maze problem on 3x3
grid.• s’ = (1,1) is initial state• result, unexplored (UX),
unbacktracked (UB), … are empty
• s, a are also empty
s’

Online DFS, example• GOAL-TEST((1,1))?
– s’ != G thus false
• (1,1) a new state? – True– ACTION((1,1)) → UX[(1,1)]
• {RIGHT,UP}
• s is null?– True (initially)
• UX[(1,1)] empty? – False
• POP(UX[(1,1)]) → a– a=UP
• s = (1,1)• Return a
s’=(1,1)
s’
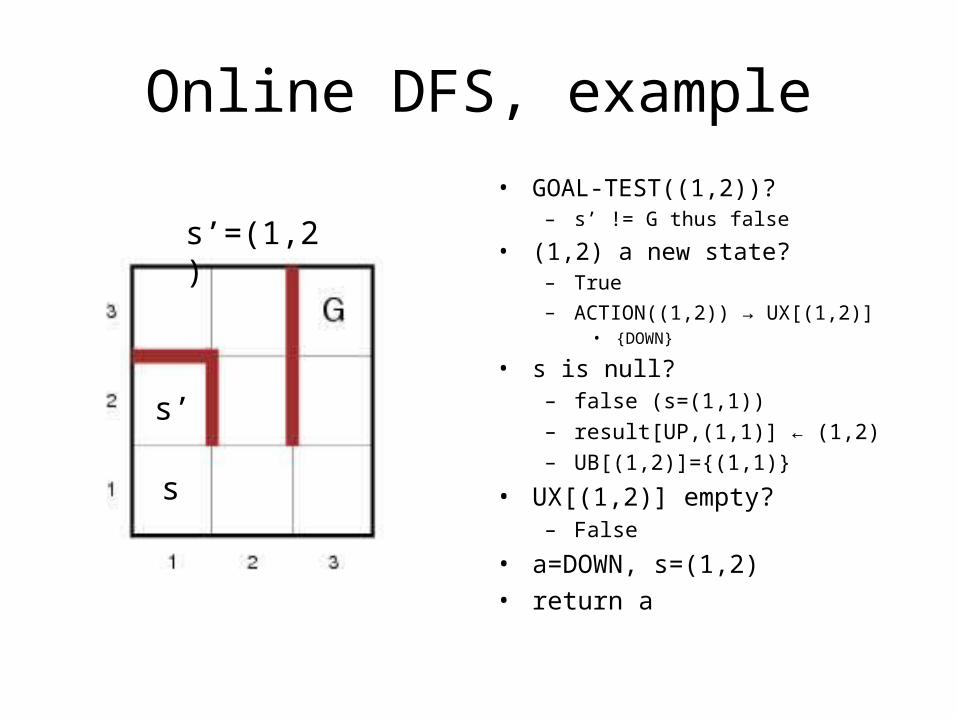
Online DFS, example
• GOAL-TEST((1,2))?– s’ != G thus false
• (1,2) a new state? – True
– ACTION((1,2)) → UX[(1,2)]• {DOWN}
• s is null?– false (s=(1,1))– result[UP,(1,1)] ← (1,2)– UB[(1,2)]={(1,1)}
• UX[(1,2)] empty? – False
• a=DOWN, s=(1,2)• return a
s’
s’=(1,2)
s

Online DFS, example• GOAL-TEST((1,1))?
– s’ != G thus false
• (1,1) a new state? – false
• s is null?– false (s=(1,2))– result[DOWN,(1,2)] ← (1,1)– UB[(1,1)] = {(1,2)}
• UX[(1,1)] empty? – False
• a=RIGHT, s=(1,1) • return a
s
s’=(1,1)
s’

Online DFS, example• GOAL-TEST((2,1))?
– s’ != G thus false
• (2,1) a new state? – True, UX[(2,1)]={RIGHT,UP,LEFT}
• s is null?– false (s=(1,1))– result[RIGHT,(1,1)] ← (2,1)– UB[(2,1)]={(1,1)}
• UX[(2,1)] empty? – False
• a=LEFT, s=(2,1) • return a
s’
s’=(2,1)
s

Online DFS, example
s’
s’=(1,1)
s
• GOAL-TEST((1,1))?– s’ != G thus false
• (1,1) a new state? – false
• s is null?– false (s=(2,1))– result[LEFT,(2,1)] ← (1,1)– UB[(1,1)]={(2,1),(1,2)}
• UX[(1,1)] empty? – True– UB[(1,1)] empty? False
• a = an action b such that result[b,(1,1)]=(2,1)– b=RIGHT
• a=RIGHT, s=(1,1)• Return a• And so on…

Online DFS• Worst case each node is visited
twice.• An agent can go on a long walk
even when it is close to the solution.
• An online iterative deepening approach solves this problem.
• Online DFS works only when actions are reversible.

Online local search• Hill-climbing is already online
– One state is stored.• Bad performance due to local maxima
– Random restarts impossible.• Solution1: Random walk introduces exploration
– Selects one of actions at random, preference to not-yet-tried action– can produce exponentially many steps
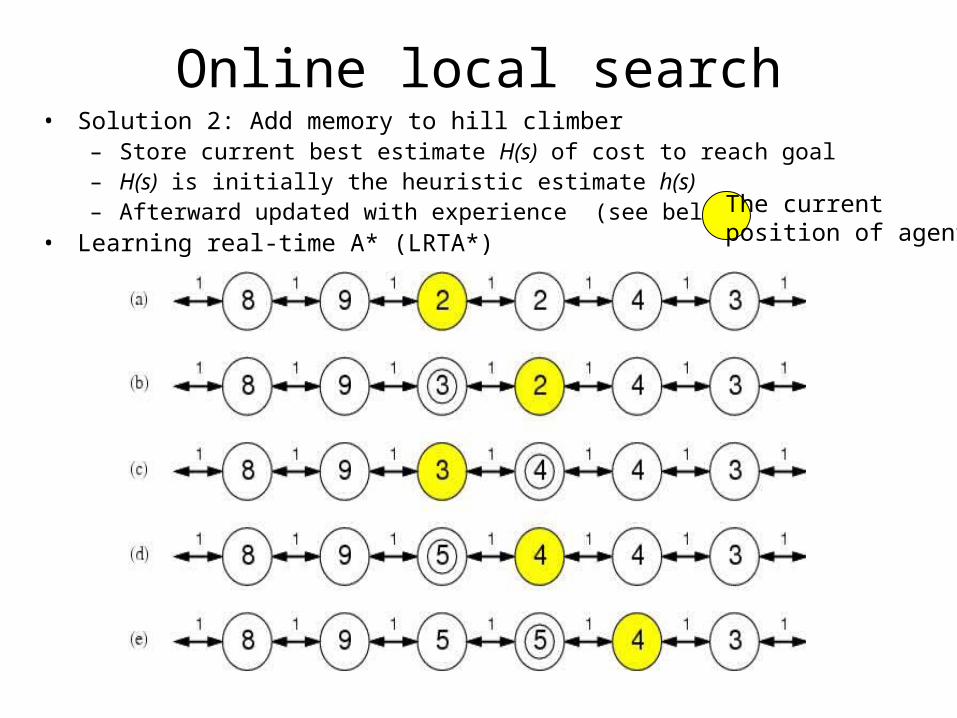
Online local search• Solution 2: Add memory to hill climber
– Store current best estimate H(s) of cost to reach goal– H(s) is initially the heuristic estimate h(s)– Afterward updated with experience (see below)
• Learning real-time A* (LRTA*)
The current position of agent

Learning real-time A*(LRTA*)function LRTA*-COST(s,a,s’,H) return an cost estimate
if s’ is undefined the return h(s)
else return c(s,a,s’) + H[s’]
function LRTA*-AGENT(s’) return an action
input: s’, a percept identifying current state
static: result, a table of next state, indexed by action and state, initially empty
H, a table of cost estimates indexed by state, initially empty
s, a, the previous state and action, initially null
if GOAL-TEST(s’) then return stop
if s’ is a new state (not in H) then H[s’] h(s’)
unless s is null
result[a,s] s’H[s] min LRTA*-COST(s,b,result[b,s],H) b ACTIONS(s)
a an action b in ACTIONS(s’) that minimizes LRTA*-COST(s’,b,result[b,s’],H)
s s’
return a

Outline
• Ch 4. informed search
• Ch 6. adversarial search– Optimal decisions– α-β pruning– Imperfect, real-time decisions
Games vs. search problems• Problem solving agent is not alone any more
– Multiagent, conflict
• Default: deterministic, turn-taking, two-player, zero sum game of perfect information– Perfect info. vs. imperfect, or probability
• "Unpredictable" opponent specifying a move for every possible opponent reply
• Time limits unlikely to find goal, must approximate
••
* Environments with very many agents are best viewed as economies rather than games

Game formalization• Initial state• A successor function
– Returns a list of (move, state) paris
• Terminal test– Terminal states
• Utility function (or objective function)– A numeric value for the terminal states
• Game tree– The state space
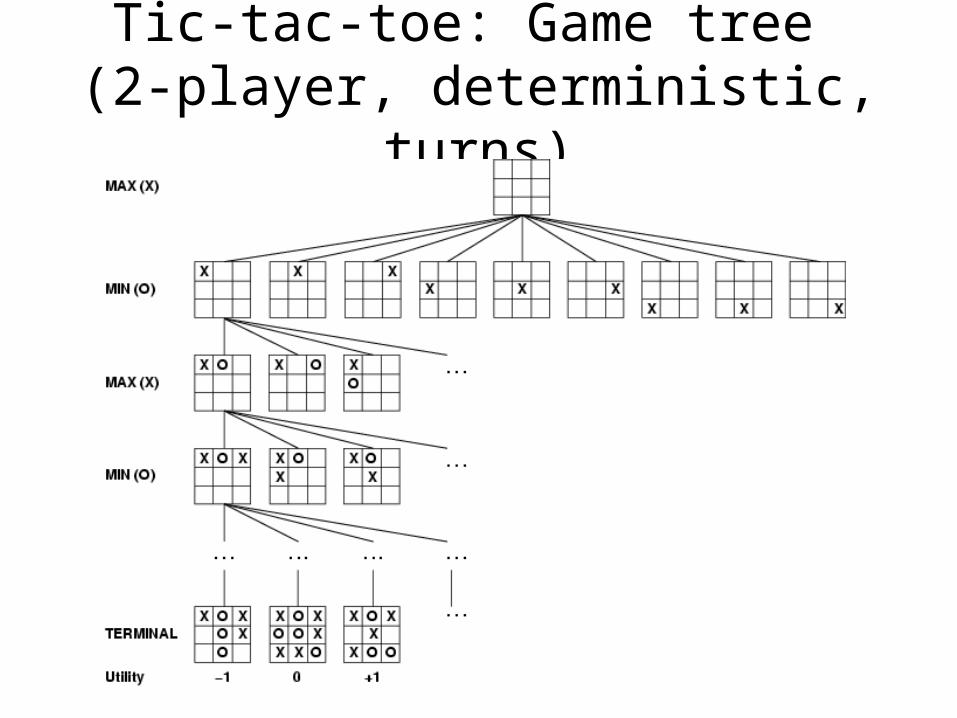
Tic-tac-toe: Game tree (2-player, deterministic, turns)

Minimax• Perfect play for deterministic games: optimal strategy• Idea: choose move to position with highest minimax value
= best achievable payoff against best play• E.g., 2-ply game: only two half-moves
••
•

Minimax algorithm

Problem of minimax search
• Number of games states is exponential to the number of moves.– Solution: Do not examine every node – ==> Alpha-beta pruning
• Remove branches that do not influence final decision
• Revisit example …

Alpha-Beta Example
[-∞, +∞]
[-∞,+∞]
Range of possible values
Do DF-search until first leaf

Alpha-Beta Example (continued)
[-∞,3]
[-∞,+∞]

Alpha-Beta Example (continued)
[-∞,3]
[-∞,+∞]

Alpha-Beta Example (continued)
[3,+∞]
[3,3]

Alpha-Beta Example (continued)
[-∞,2]
[3,+∞]
[3,3]
This node is worse for MAX

Alpha-Beta Example (continued)
[-∞,2]
[3,14]
[3,3] [-∞,14]
,
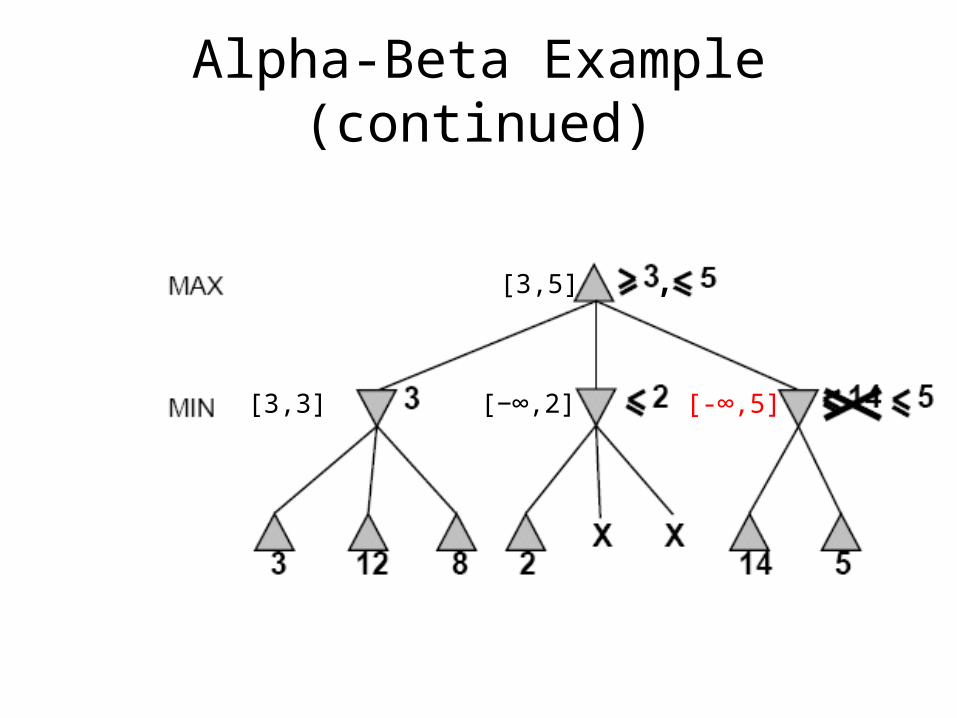
Alpha-Beta Example (continued)
[−∞,2]
[3,5]
[3,3] [-∞,5]
,

Alpha-Beta Example (continued)
[2,2][−∞,2]
[3,3]
[3,3]

Alpha-Beta Example (continued)
[2,2][-∞,2]
[3,3]
[3,3]
Properties of α-β
• Pruning does not affect final result
• Good move ordering improves effectiveness of pruning
• With "perfect ordering," time complexity = O(bm/2) doubles depth of search
•
•

Why is it called α-β?
• α is the value of the best (i.e., highest-value) choice found so far at any choice point along the path for max
• If v is worse than α, max will avoid it prune that branch
• Define β similarly for min•
–•
•

The α-β pruning algorithm
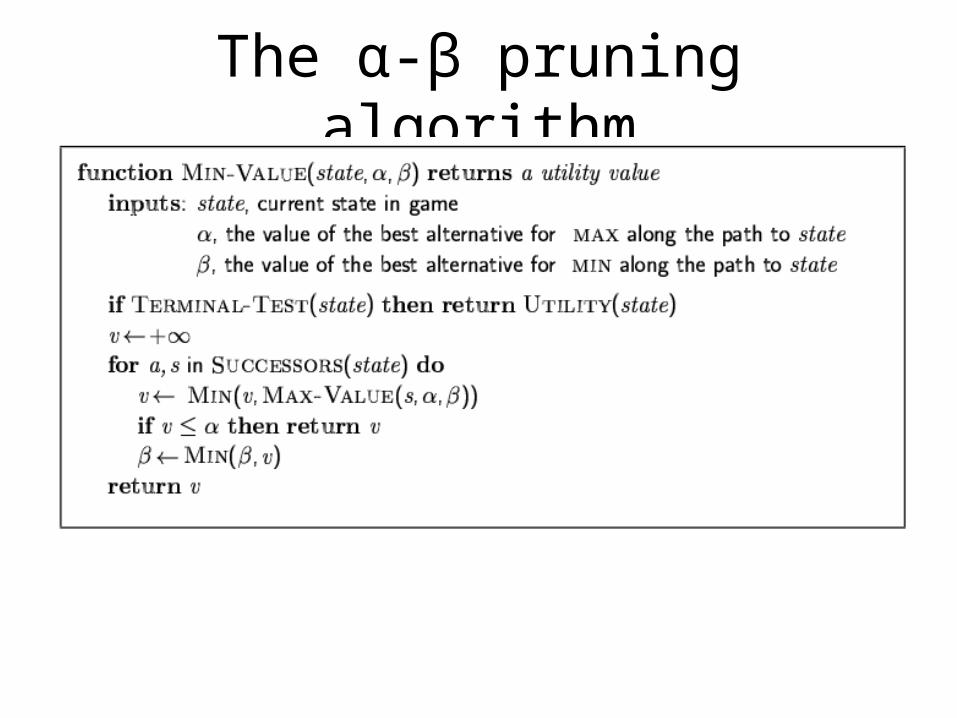
The α-β pruning algorithm

Resource limits• In reality, imperfect and real-time decisions are
required– Suppose we have 100 secs, explore 104 nodes/sec
106 nodes per move
• Standard approach:– cutoff test:
• e.g., depth limit
– evaluation function • = estimated desirability of position
•
•
•
–

Evaluation functions
• For chess, typically linear weighted sum of features
Eval(s) = w1 f1(s) + w2 f2(s) + … + wn fn(s)
• e.g., w1 = 9 for queen, w2 = 5 for rook, … wn = 1 for pawn
f1(s) = (number of white queens) – (number of black queens), etc.
•

Cutting off searchMinimaxCutoff is identical to MinimaxValue except
1. Terminal-Test is replaced by Cutoff-Test2. Utility is replaced by Eval
Does it work in practice?bm = 106, b=35 m ≈ 4
4-ply lookahead is a hopeless chess player!– 4-ply ≈ human novice– 8-ply ≈ typical PC, human master– 12-ply ≈ Deep Blue, Kasparov
–
•
1.

Games that include chance
• Backgammon: move all one’s pieces off the board• Branches leading from each chance node denote the possible dice rolls
– Labeled with roll and the probability
chance nodes
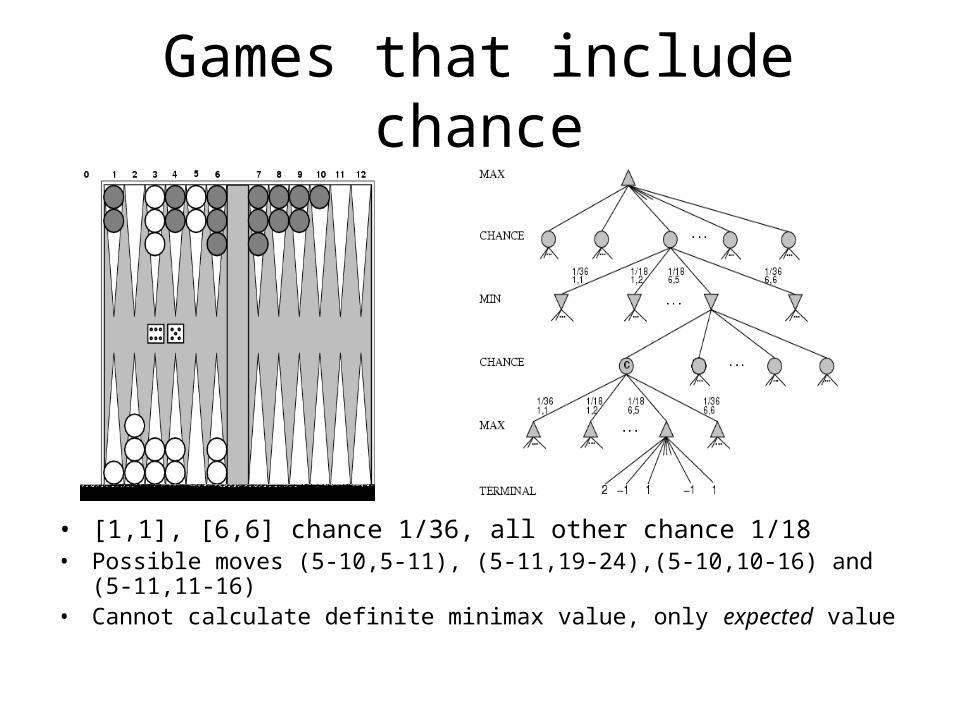
Games that include chance
• [1,1], [6,6] chance 1/36, all other chance 1/18 • Possible moves (5-10,5-11), (5-11,19-24),(5-10,10-16) and (5-11,11-16)• Cannot calculate definite minimax value, only expected value

Expected minimax valueEXPECTED-MINIMAX-VALUE(n) =
UTILITY(n) If n is a terminal
maxs successors(n) MINIMAX-VALUE(s) If n is a max node
mins successors(n) MINIMAX-VALUE(s) If n is a max node
s successors(n) P(s) * EXPECTEDMINIMAX(s) If n is a chance node
These equations can be backed-up recursively all the way to the root of the game tree.
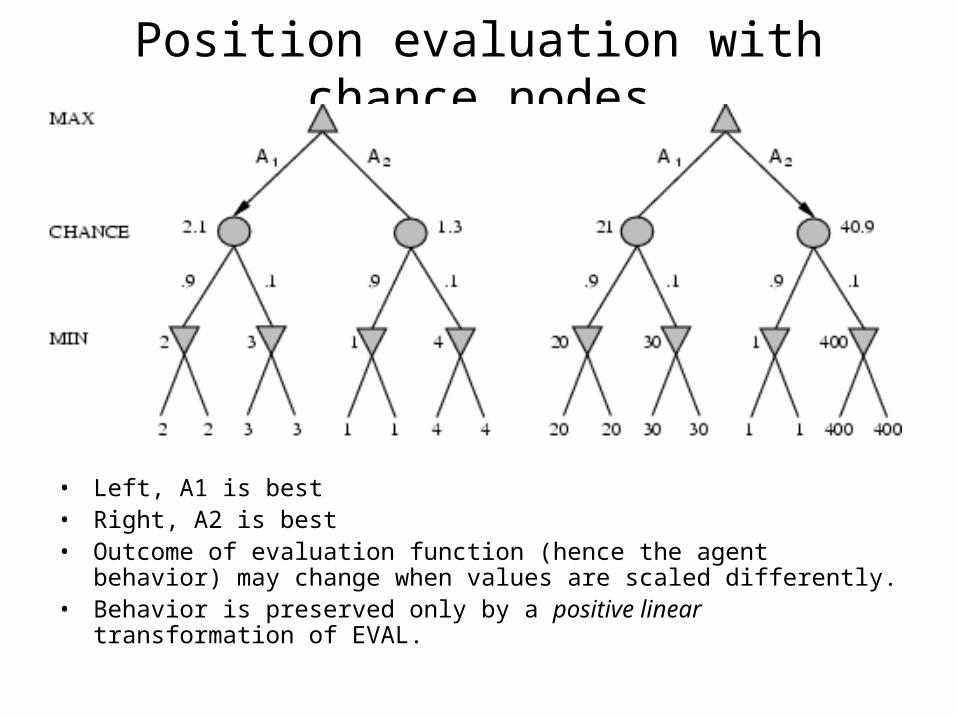
Position evaluation with chance nodes
• Left, A1 is best• Right, A2 is best• Outcome of evaluation function (hence the agent behavior) may change
when values are scaled differently.• Behavior is preserved only by a positive linear transformation of EVAL.