algorithm
TRANSCRIPT

Requirement:
The objective is to detect cloud.from the rest of the region in visible band.
The output that we get from the CMV4000 camera is in the form of Bayer’s pattern
Figure 1 Bayer Pattern (a)
Why to interpolate?
The raw output of Bayer-filter cameras is referred to as a Bayer pattern image. Since each pixel is filtered
to record only one of three colors, the data from each pixel cannot fully specify each of the red, green,
and blue values on its own. To obtain a full-color image, various demosaicing algorithms can be used
to interpolate a set of complete red, green, and blue values for each pixel. These algorithms make use of
the surrounding pixels of the corresponding colors to estimate the values for a particular pixel.
De-bayering Algorithm
Bilinear interpolation
For a pixel, we consider its 8 direct neighbors and then we determine the 2 missing colors
of this pixel by averaging the colors of the neighboring pixels.
Figure 2 Bayer Pattern (b)

Pixel R33 (Red pixel):
Red = R33
Green = (G23 + G34 + G32 + G43) / 4
Blue = (B22 + B24 + B42 + B44) / 4
Pixel B44 (Blue pixel):
Blue = B44
Green = (R33 + R35 + R53 + R55) / 4
Red = (R33 + R35 + R53 + R55) / 4
Pixel G43 (Green in blue row):
Green = G43
Red = (R33 + R53) / 2
Blue = (B42 + B44) / 2
Pixel G34 (Green in a red row ):
Green = G34
Red = (R33 + R35) / 2
Blue = (B24 + B44) / 2
Why Bilinear interpolation?
Due to its high PSNR ratio
pixeli
iith
eactualValuValuedemosafcedN
RMSE
RMSEPSNR
2
10
)(1
255log20
Limitations
It will be difficult and time consuming to implement it on the hardware.
Conversion to 8-bit
Now, the 10-bit data is converted to 8-bit data, and the least significant bits are discarded.
Why 8-bit data?
Because we have to deal with intensities in the range of 0-255.
For that we use the intensity difference.
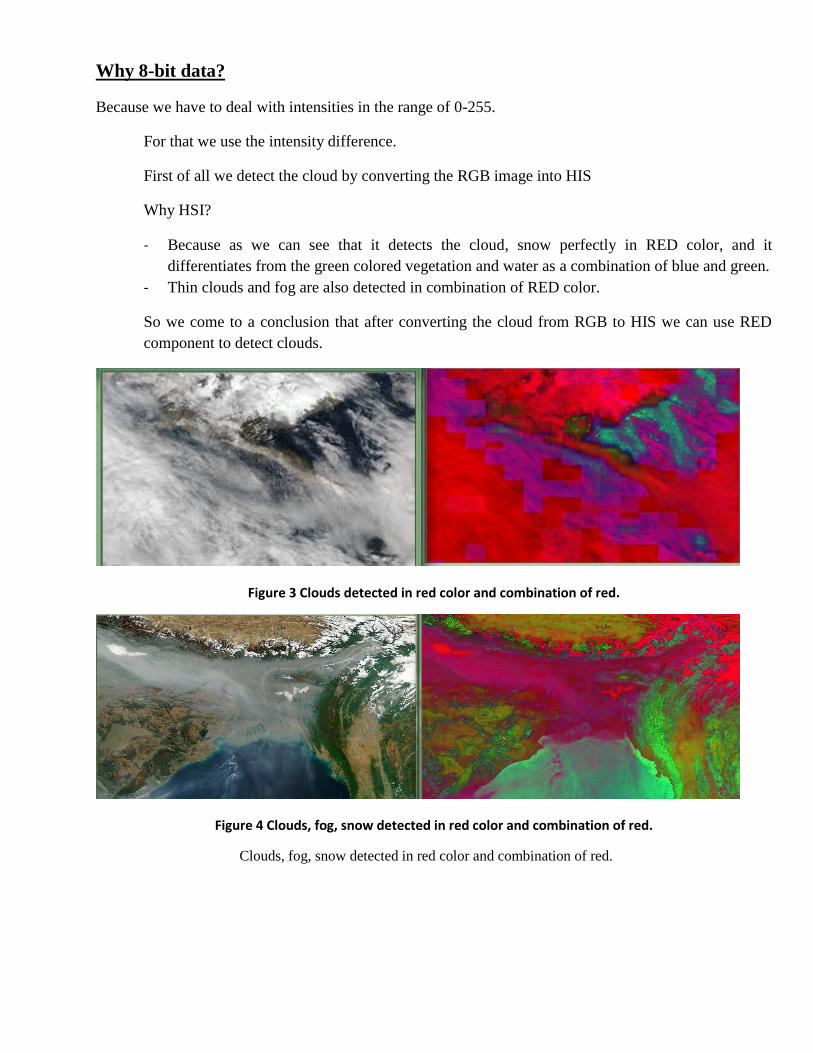
First of all we detect the cloud by converting the RGB image into HIS
Why HSI?
- Because as we can see that it detects the cloud, snow perfectly in RED color, and it
differentiates from the green colored vegetation and water as a combination of blue and green.
- Thin clouds and fog are also detected in combination of RED color.
So we come to a conclusion that after converting the cloud from RGB to HIS we can use RED
component to detect clouds.
Figure 3 Clouds detected in red color and combination of red.
Figure 4 Clouds, fog, snow detected in red color and combination of red.
Clouds, fog, snow detected in red color and combination of red.

Thresholding
Now we apply thresholding to differentiate clouds from other regions [2].
Why thresholding?
Because we do not want to detect the edges, we want to detect the whole area pixel by pixel and that is
possible through thresholding.
Threshold Details
Standard Deviation
N
xx
2)(
Where,
=the standard deviation
x =each value in the population(total values)
x =the mean of the values
N =the number of values(the population)
For calculating mean,
x =i
yni
i
i
0
Where,
x =mean
y(pixel intensity)[0,255]
n=number of pixels
Median For calculating median
T=2
maxmin
Where,
T=threshold
min=minimum intensity of pixel
max=maximum intensity of pixel
Limitations:
The major problem with thresholding is that we consider only the intensity, not any
Relationships between the pixels. There is no guarantee that the pixels identified by
thresholding process are contiguous.

The problem is also reflected in result. This algorithm cannot detect ultra thin clouds and light
fog. If the threshold value is decreased so other object like sand and soil is detected because the
intensity of thin clouds, fog and sand is nearly same.
Results:
Threshold
Standard
Deviation
Median
Table 1 Visual comparison of different threshold

Histogram Equalization
Reasons:
It gives contrast between different objects like clouds, water, snow, vegetation, soil, sand etc.
The intensity of cloud and snow is high compare to vegetation, water, soil and sand. After
applying histogram equalization it gives contrast between above objects. Clouds and snow has
high contrast, So it is easy to detect the clouds after applying threshold.
In other words, we can say that Histogram equalization works as filter.
Calculations:
Consider a discrete grey scale image {x} and let ni be the number of occurrences of gray level i. The
probability of an occurrence of a pixel of level i in the image is
Lin
nixpiP i
x 0,)()(
L being the total number of gray levels in the image (typically 256), n being the total number of pixels in
the image, and )(ipx being in fact the image's histogram for pixel value i, normalized to [0,1].
Let us also define the cumulative distribution function corresponding to px as
)()(0
jpicdfi
j
xx
Which is also the image's accumulated normalized histogram.
We would like to create a transformation of the form y = T(x) to produce a new image {y}, with a flat
histogram. Such an image would have a linearized CDF across the value range, i.e.
iKicdf y )(
For some constant K. The properties of the CDF allow us to perform such a transform (see Inverse
distribution function); it is defined as
)()( kcdfkTy x
Where k is in the range [0,L). Notice that T maps the levels into the range [0,1], since we used a
normalized histogram of {x}. In order to map the values back into their original range, the following
simple transformation needs to be applied on the result:
}min{})min{}(max{*' xxxyy
In below example L belongs to [0,255].

Because grey scale image has 8 –bit depth
)1(*
)*(
)()(
min
min LcdfNM
cdfvcdfroundvh
Where cdfmin is the minimum non-zero value of the cumulative distribution function (in this case 1), M ×
N gives the image's number of pixels.
M=width and N=height
Limitations:
Histogram equalization can produce undesirable effects when it is applied on low color depth.
It works based on global threshold value.
The problem is also reflected in the result. In some images the intensity of shadow of object, the
thin clouds and sand will map into the one class when applying equalization operation. So it is
difficult to distinguish thin cloud in image.
Results:
Algorithm
Histogram
Equalization
Table 2 Visual result of histogram equalization

Otsu Clustering:
Reasons:
Due to unsatisfactory results from the above two approaches we decided to go for segmentation through
Otsu’s method.
Working
We use Otsu’s method to segment the input photograph into candidate cloud regions and non-
cloud regions, which can receive a coarse cloud detection result.
Otsu’s method assumes that the photograph to be thresholded contains two classes of pixels or a
bimodal histogram (for example, foreground and background) and then calculates the optimal
threshold separating those two classes so that their interclass variance is maximum.
Algorithm:
Algorithm Steps:
1. Compute histogram and probabilities of each intensity level
2. Set up initial )0(i and
)0(i
Where,
)0(i
: Initial probability
)0(i: Initial mean
3. Step through all possible thresholds t=1….. maximum intensity
1. Update i and i
2. Compute )(2 tb
where
)(2 tb : intra class variance
4. Desired threshold corresponds to the maximum )(2 tb
5. You can compute two maxima (and two corresponding thresholds). )(2
1 tb is the greater max
and )(2
2 tb is the greater or equal maximum
Where,
)(2
1 tb: Class 1 variance

)(2
2 tb: Class 2 variance
6. Desired threshold = 2
21 ThresholdThreshold
Results:
Algorithm
OTSU
clustering
Table 3 Visual result of Otsu clustering
Limitations:
The method does not work well with variable illumination.
Above drawbacks also reflect in results, algorithm does not detect thin clouds and light fog.
References:
1. Shrivastava, P. "Cloud Detection with MATLAB." Journal of Engineering Science and
Technology Review 6, no. 1 (2013): 68-71.
2. Jedlovec, Gary J., and Kevin Laws. "Operational cloud detection in GOES imagery." In 11th
conference on Satellite Meteorology and Oceanography, vol. 357. Madison: Univ of WI,
Madison, 2001.