algorithms for testing and embedding planar...
TRANSCRIPT
1
Algorithms for Testing and Embedding Planar GraphsZhigang Jiang, University of Windsor
A planar graph is a graph which can be drawn in the plane without any edges crossing. Some pictures of a planar graph might
have crossing edges, but it’s possible to redraw the picture to eliminate the crossings. Planar graphs and their relatives, appearin many practical applications. For example, in the design of complex radioelectronic circuits using printed circuit board, one
problem is to arrange the elements so that the conductors connecting them do not intersect each other. This survey contains
two crucial parts: algorithms for embedding graphs into planarity which is about embedding a given graph G into planarities ,and planarity testing algorithms which is about testing whether a given graph G can be embedded into planarity or not.
Categories and Subject Descriptors: F.2.2 [Analysis of algorithms and problem complexity]: Nonnumerical Algorithms andProblems—Geometrical problem and computations; I.3.5 [Computer Graphics]: Computational Geometry and Object Model-ing—Geometric algorithms,languages, and systems
General Terms: Algorithms
Additional Key Words and Phrases: planar graph, embedding graphs into planarity algorithms, planarity testing algorithms
Contents
1 Introduction 2
2 Embedding graphs into planarity 32.1 embedding algorithms donot use PQ-trees . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.1.1 A planarity embedding algorithm based on the Kuratowski theorem . . . . . . . . 32.1.2 An embedding algorithm based on open ear decomposition . . . . . . . . . . . . . . 32.1.3 A simplified o (n) planar embedding algorithm for biconnected graphs . . . . . . . 42.1.4 Lempel,Even,and Cederbaum planarity method . . . . . . . . . . . . . . . . . . . . 5
2.2 Embedding algorithms using PQ-trees . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.2.1 Embedding planar graphs using PQ-tree algorithms . . . . . . . . . . . . . . . . . . 62.2.2 An algorithm is on the basis of vertex addition for planarity testing and uses PQ-
trees to embed graphs into planarites . . . . . . . . . . . . . . . . . . . . . . . . . . 62.2.3 An algorithm modifies PQ-trees to embed graphs into planarities . . . . . . . . . . 7
3 Planarity testing algorithms 103.1 Planarity testing algorithm based on 3-connectivity . . . . . . . . . . . . . . . . . . . . . . 10
3.1.1 A new planarity test based on 3-connectivity . . . . . . . . . . . . . . . . . . . . . . 103.2 Planarity testing algorithms based on DFS . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3.2.1 An algorithm uses DFS to test the planarity of a graph . . . . . . . . . . . . . . . . 113.2.2 A simple planarity testing algorithm based on DFS search tree and modified Ver-
tex addition approach . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
4 Concluding Comments 13
5 Annotation 165.1 Bruno 1970 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165.2 Boyer 1999 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
, Vol. V, No. N, Article 1, Publication date: January 20YY.

1:2 • Zhigang Jiang
5.3 Boyer 2004 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175.4 Chiba 1984 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 185.5 Hopcroft 1974 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 195.6 Haeupler 2008 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 205.7 Mei 1970 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 215.8 Ozawa 1991 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 215.9 Ramachandran 1989 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 225.10 Shih 1993 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
1. INTRODUCTION
A graph is planar if it can be drawn in the plane without any crossing edges. That is, each vertex islocated at one point of the plane, and a curve from one point to another is drawn between the pointscorresponding to vertices connected by an edge. A practical reason for studying planar graphs is thatthey, and their relatives, appear in many practical applications. The study of two-dimensional imagesoften results in problems related to planar graphs, as does the solution of many problems on the two-dimensional surface of our earth, for example, In Gas, Water, Electricity Problem, Is there any way toconnect each of three houses to each of the three utilities(Gas, water, and electricity) in such a waythat none of the supply lines cross?
This survey is about that embedding a given graph into planarity using various embedding algo-rithms, or testing whether a given graph can be embedded into planarity or not using different testingalgorithms. The papers in the survey have been found in Google Scholar, ACM, IEEE, and Journal ofComputer and System Sciences and others.
Among these papers that I found, there are 11 journal papers:[Bruno et al. 1970], [Hopcroft andTarjan 1974], [Booth and Lueker 1976], [Williamson 1980], [Chiba et al. 1984], [Ramachandran andReif 1994], [Juvan et al. 1997], [Jianer and Chen 1997], [Wei-Kuan and Wen-Lian 1999], [Boyer et al.2004], [Haeupler and Tarjan 2008]; there are 7 conference papers: [Mei and Gibbs 1970], [Ramachan-dran and Reif 1989], [Ozawa 1991], [Shih and Hsu 1993], [Boyer and Myrvold 1999], [Kawarabayashiet al. 2008], [Kawarabayashi 2009]; there is one unpublished paper: [Boyer et al. 2003], and there isone chapter of a book: [Perunicic and Duric 1985].
To study the planar graphs problem, there are two important parts that need to be considered:embedding graphs into planarity and planarity testing. Therefore, in the rest of the survey, thereare two sections: embedding graphs into planarity algorithms and planarity testing algorithms. Thesection on algorithms for embedding graphs into planarity, it includes embedding algorithms based onPQ-tree and other embedding algorithms, and in the other section, includes planarity algorithm basedon DFS and planarity algorithm based on 3-connectivity.
The relationships of these papers are on follow: Hopcroft and Tarjan [1974] is cited by: Chiba et al.[1984], Ramachandran and Reif [1989], Shih and Hsu [1993],Boyer and Myrvold [1999] and Boyeret al. [2004]; Booth and Lueker [1976] is cited by: Chiba et al. [1984], Ramachandran and Reif [1989],Boyer and Myrvold [1999], Boyer et al. [2004], and ?]; Williamson [1980] is cited by: Boyer and Myr-vold [1999]; Shih and Hsu [1993] is cited by: Boyer et al. [2004], and Haeupler and Tarjan [2008];Ramachandran and Reif [1994] is cited by: Boyer et al. [2004]; Boyer and Myrvold [1999] is cited by:Haeupler and Tarjan [2008]; Wei-Kuan and Wen-Lian [1999] is cited by: Boyer et al. [2004], Haeuplerand Tarjan [2008]; and Boyer et al. [2004] is cited by Haeupler and Tarjan [2008]. The relationshipsindicate that [Hopcroft and Tarjan 1974] and [Booth and Lueker 1976] are two very important papersin this area.
Many of embedding algorithms use PQ-trees which are very important data structures for embed-ding algorithms and these papers from year to year finds a way to improve the previous algorithm., Vol. V, No. N, Article 1, Publication date: January 20YY.

Algorithms for Tesing and Embedding Planar Graphs • 1:3
2. EMBEDDING GRAPHS INTO PLANARITY
The problem addressed by the authors is how to embed a given graph G into planarity. Firstly, testingwhether the graph can be embedded into planarity or not, secondly, if the graph can be embeddedinto planarity, draw the planar graph of the given graph, and This section consists of two subsections:Embedding planar graphs using PQ-trees, and other embedding algorithms.
2.1 embedding algorithms donot use PQ-trees
In this subsection, there are some algorithms to embed a given grap into planarity, but they do notuse PQ-tree data structure, there are 4 papers in this subsection: A planarity algorithm based on thekuratowski theorem, An optimal parallel algorithm for graph planarity, Stop minding your p’s and q’s:A simplified O(n) planar embedding algorithm,and Lempel, even and cederbaum planarity method.
2.1.1 A planarity embedding algorithm based on the Kuratowski theorem. Mei and Gibbs [1970] donot refer to any previous work.
Mei and Gibbs [1970] states that all of the previous work are not dicrect applications of Kuratowskitheorem.
In this paper, Mei and Gibbs [1970] present an algorithm which is a direct application of The Kura-towski Theorem, and based on the observation that a Kuratowski graph can be spanned by the unionof two of its circuits. The details of the algorithm are as follows Mei and Gibbs [1970, p.93]:
(1) Generate all the circuits of length five or greater, for a given graph G.(2) For any two circuits C1 and C2, let SG(C1) = <V1,C1>and SG(C2) = <V2,C2>. If V1 ∩ V2 has exactly
five elements and C1 ∩ C2 = ∅, go to next step, otherwise, go to step 4.(3) Let (vi1,vi2,vi3,vi4, vi5) be the five elements of V1 ∩ V2 ordered in this cyclic order and Trace SG(C1)
in one direction, trace SG(C2) and check to see whether all of the five elements can be place in acyclic order (vi1,vi2,vi3,vi4, vi5) or not, if it can, SG(C1 ∪ C2) is a K∗5 graph and graph G is non-planar,otherwise, go to last step.
(4) If V1 ∩ V2 has more than five elements and C1 ∩ C2 has more than two elements, go to the step 5,otherwise go to the last step.
(5) Form the vertex adjacency matrix M = (mij) of SG(C1 ∪ C2), if vi,vj 6∈C1 ∪C2, mij = 0; if vi,vj∈C1-C2,mij = 1; if vi,vj∈C2-C1, mij = 2; if vi,vj∈C1 ∩C2, mij = 3.
(6) Check the entries of the matrix row b row once, and result in a cubic graph G = <V, E> with sixvertices.
(7) If there are no more pairs of circuits to be considered the graph G is planar, otherwise go to step 2and choose another pairs of circuits C1 and C2 of G, and go to step 2.
Mei and Gibbs [1970] do not mention any specific implementation or experiments.Mei and Gibbs [1970] claim that the algorithm could be very efficient for a small number of graphs
or graphs that do not have a large number of circuits, but it is not efficient for a large graph,and thetime complexity of this algorithm is O(n).
Mei and Gibbs [1970] claim that the first step (the generation of circuits) of the algorithm can beexecuted first and the generated circuits can be stored on some form of auxiliary storage. Then thecheck for planarity can be executed separately.
No other researchers refer to This work.
2.1.2 An embedding algorithm based on open ear decomposition. Ramachandran and Reif [1989]refer toHopcroft and Tarjan [1974] and Booth and Lueker [1976].
, Vol. V, No. N, Article 1, Publication date: January 20YY.
1:4 • Zhigang Jiang
Ramachandran and Reif [1989] state that the best previously known parallel planarity algorithmrequires O (log2 n) using O (n) processor, which is not efficient compared with the authors algorithm.
Ramachandran and Reif [1989] present a new parallel algorithm which is based on open ear decom-position. To embedding graph into planarity, it includes several stepsRamachandran and Reif [1989,p.287]:
(1) Find an edge (s, t) in the graph, then find an open ear decomposition starting with(s , t), and obtainthe directed st-numbering graph Gd its spanning tree Td. and the associated open ear decomposi-tion D = [ P ′0,P ′1,P ′1..P ′r−1].
(2) Find clumps of each ear together with the hooks for the anchor bridgelets.(3) Forming the interlacing parity graph for each ear and adding in the link edges to form the con-
straint graph G*.(4) Find a 2-coloring of G*.(5) Given color 0 to the all attachment edges of each ear P ′i whose corresponding real vertices on G*.(6) Find the nesting structure of the bridges assigned to each side of an ear.(7) Compute the number of faces in this combinatorial embedding and determine whether G is planar
or not by Eulers formula.(8) If G is a planar then combine all vertices in LTv into a signle vertex v for each v.
Ramachandran and Reif [1989] analyse their algorithm and claim that the planarity problem can besolved in time O(log n) by their algorithm.
Ramachandran and Reif [1989] claim that all of the steps in this algorithm can be performed inlinear sequential time. Therefore, it gives a new linear time sequential algorithm for planarity.
Ramachandran and Reif [1989] claim that their algorithm is different from all of previous planarityalgorithm, since it uses general open ear decomposition for graph search.
No other researchers refer to This work.
2.1.3 A simplified o (n) planar embedding algorithm for biconnected graphs. Boyer and Myrvold[1999] refer to Hopcroft and Tarjan [1974],Booth and Lueker [1976] and Williamson [1980].
Boyer and Myrvold [1999] state that both Hopcroft and Tarjan [1974] and Williamson [1980] do notinclude the complete set of templates required to updata the PQ-tree fast enough to ensure that thealgorithm can run in O(n) time.
Boyer and Myrvold [1999] represent a new planar graph embedding algorithm for biconnectedgraphs. The algorithm contains the following stepsBoyer and Myrvold [1999, p.143]:
(1) Creating a depth fi0000rst search tree like any other linear planar embedding algorithm.(2) Adding one edge at one time to the embedding, and stored all of data in a new data structure which
created by authors.(3) Embed each DFS tree edge as a singleton bicomp.(4) Processing the vertices in reverse DFI order.
Boyer and Myrvold [1999] claim that their new algorithm could reduce the time complexity of solvinggraph planarity problems, and make the planar graph embedding algorithm more accessible as wellas reduce the implementation time dramatically.
Boyer and Myrvold [1999] claim that the time complexity of their new algorithm is O(n), and it iseasier to implement.
Boyer and Myrvold [1999] claim that the main contribution of their algorithm is the data structureused for the graph.
Boyer and Myrvold [1999] is cited by [Haeupler and Tarjan 2008]., Vol. V, No. N, Article 1, Publication date: January 20YY.

Algorithms for Tesing and Embedding Planar Graphs • 1:5
2.1.4 Lempel,Even,and Cederbaum planarity method. Boyer et al. [2004] refer toHopcroft and Tar-jan [1974],Booth and Lueker [1976],Wei-Kuan and Wen-Lian [1999],Shih and Hsu [1993],and Ra-machandran and Reif [1994].
Boyer et al. [2004] claim that Wei-Kuan and Wen-Lian [1999] is widly regarded as not easy to im-plement.
In this paper, Boyer et al. [2004] present a simple pedagogical graph theoretical description of Lem-pel, Even, and Cederbaum(LEC) planarity method based on concepts due to Thomas Boyer et al. [2004,p.141].
(1) The authors introduce some key ingredient used by LEC method.If H is a planar graph, assume F is a subgraph of H, if F is induced by the edges incident to
the external face of a planar embedding of H, we say that F is a frame of H.Assume X and Y are sets of vertices of a frame F of H. A path PT in F with basis S is called an
XY-path, if the endpoints of PT are in X, each vertex of S that sees X through EF \ES is in PT, eachvertex of S that sees Y through EF \ES is in PT, and no component of F VS contains vertices bothin X and in Y .
(2) The authors introduce the LEC planarity testing method.LEC method examines the vertices one by one of a given biconnected graph on the basis of
LEC-numbering. In each iteration, the method tries to extend a frame of the subgraph induced bythe already examined vertices. If did not find a frame, this algorithm declares that this graph isnon-planar and stops.
(3) The authors introduce the implementation of SH algorithm.SH algorithm is a linear-time planarity algorithm, and it is very complex to implement. SH
algorithm uses a DFS-numbering rather than a LEC-numbering. If the vertices of G are orderedfrom a DFS-numbering, then the graph G[i+1,,n] is connected i= 1,,n, if there is a frame F of H andH is not connected, then F is also not connected.
Boyer et al. [2004] programmed the algorithms in LEDA including the implementation of SH algo-rithm and an implementation of the BM algorithm develop in C.
Boyer et al. [2004] state that BL performs the planarity test 4 to 5 times faster than SH implemen-tation, and the time complexity of this algorithm is O(n).
Boyer et al. [2004] claim that their current understanding of SH algorithms make us believe that wecan design a new implementation which would run considerably faster.
Boyer et al. [2004] is cited by Haeupler and Tarjan [2008]
2.2 Embedding algorithms using PQ-trees
In this subsection, all of the papers use a PQ-tree to embed graphs into planarity, there are threepapers in this subsection: Embedding planar graphs using PQ-trees, a certain embedding of a planargraph in the plane, Planarity algorithms via PQ-trees (extended abstract).
The algorithm of the first paper uses PQ-trees to embed a given graph into planarity, and this al-gorithm is on the basis of the ”vertex-addition algorithm”. This algorithm is more simple and easierto understand and implement, compare to Hopcroft and Tarjans ”path addition” algorithm. The algo-rithm of the secondary paper also uses PQ-trees, but this algorithm is only valid for a graph that havetwo vertices in the given subset U appers on the same face boundary.The algorithm is on the basisfor planarity and uses a data structure, PQ-tree, to embed graph into planarity, and the complexity ofthis algorithm is O(n). The authors of the last paper presents liner time algorithm and the algorithmmodified Booth and Luekers PQ-tree data structure.
, Vol. V, No. N, Article 1, Publication date: January 20YY.

1:6 • Zhigang Jiang
2.2.1 Embedding planar graphs using PQ-tree algorithms. Chiba et al. [1984] refer to Hopcroft andTarjan [1974] and Booth and Lueker [1976].
Chiba et al. [1984] state that one part of Hopcroft and Tarjans ”path-addition” algorithm for embed-ding an intractable path called ”special path” is complicated and difficult to implement(Hopcroft andTarjan [1974] observed that an embedding algorithm can be constructed by modifying their testingalgorithm ([Hopcroft and Tarjan 1974]). However, the modification seems fairly complicated and it isparticularly difficult to implement part of the algorithm for embedding an intractable path called a”special path.”).
Chiba et al. [1984] present a new linear algorithm for embedding Planar Graphs Using PQ-trees,which is on the basis of the ”vertex-addition algorithm”. This algorithm is more simple and easier tounderstand and implement, compare to Hopcroft and Tarjans ”path-addition” algorithm. The PQ-treedata structure is often used to embed an undirected graph into planarity, the author is presented a newalgorithm to embed a directed graph into planarity. Although this algorithm is based on the planaritytesting algorithm using a PQ-tree, the authors devise one part of the original algorithm, the bushform corresponding to the PQ-tree is updated while simplifying the PQ-tree. Firstly, getting Au(theadjacency lists expressing the embedding), during this procedure all of the vertices smaller or largerthan the vertex v are embedded around v; secondly getting upward embedding AU , in this procedure,the authors use a direction flag ”v” to express the direction of the adjacency list and to trace how theQ-vertex is inverter, and DFS is used to scan the s-subtree to get the Au(v)(the adjacency list for vertexv).
Chiba et al. [1984] analyse their algorithm and claim that it is a simpler algorithm than Hopcroftand Tarjan [1974] to embed a graph G into planarity, and it is easier to implement.
Chiba et al. [1984] claim that the time complexity of the new algorithm is O(n).Chiba et al. [1984] claim that The computation time and the storage space of this algorithm are
linear and optimum within a constant factorNo other researchers refer to This work.
2.2.2 An algorithm is on the basis of vertex addition for planarity testing and uses PQ-trees to embedgraphs into planarites. Ozawa [1991] do not refer to any previous work.
Ozawa [1991] state that various problem related to planar graphs(planarity testing problem,thegraph embedding problem, and the graph planarization problem (determine edges to be removed tomake the given graph planar)) have applications to IC layout problems,but for such applications it isimportant to have graph models which can well represent layout constraints. Since layout constraintsvary from circuits to circuits, there still remains much to be done.
Ozawa [1991] present an algorithm which is valid for this kind of graph that doesnt have two verticesin the given subset U appears on the same face boundary. This algorithm is based on vertex addition forplanarity testing and uses a data structure, PQ-tree, to embed the graph. In this algorithm, for a givenbiconnected planar graph G and a subset U of V, an embedding of G satisfy the following condition: Atmost one vertex in U appears on a face boundary of the embedding. The PQ-tree implementation ofalgorithm EMB contains 2 steps as following Ozawa [1991, p.1001]:
(1) Construct T1 which is constituted by a P node and leaves corresponding to virtual vertices adjacentto vertex 1.
(2) For node k =1 to node n-1.(Reduction) Obtain TK* from TK(Let GK(VK ,EK) be the subgraph of G induced by vertices
1,2,...,k.Graph GK* is defined to be the graph obtained from Gk by adding virtual vertices togetherwith virtual edges each of which connects a vertex in VK and a virtual vertex in V-VK(a virtualvertex is a degree one vertex which is duplicated from a (real) vertex in V-VK so that the edge has
, Vol. V, No. N, Article 1, Publication date: January 20YY.
Algorithms for Tesing and Embedding Planar Graphs • 1:7
its end vertex in V-VK by itself. A virtual vertex is given the same number as its original vertex.Theedge which has a virtual vertex as its end vertex is called a virtual edge). The bush form, denoted byBK , of GK* is an embedding of GK* such that all the virtual edges and virtual vertices are placedon the outer face. If and only if G is planar, a bush form BK for K = 1,2,...,n-1 can be converted toanother bush form such that all virtual vertices numbered k+1 appear consecutively(such a bushform is called a reduced bush form and is denoted by BK*. The process of obtaining BK* from BK
is called the reduction). PQ-tree represnting BK and BK* are denoted by TK and TK* respectively.);
(node addition) Merge all the pertinent leaves to form a new p node and add to it leaves corre-sponding to the virtual vertices which are adjacent to vertex k+1.
Ozawa [1991]’s algorithm, they modify step 2, the nodes of the pertinent tree are traversed in the post-order and are transformed according to the templates they match. And at the same time node label arealtered.
Ozawa [1991] dont mention any analysis of the algorithm.Ozawa [1991] claim that the time complexity of their algorithm is O(n) since the change of labels
attached to the nodes of PQ-tree and check of COND-IND can be done without increasing the timecomplexity.
Ozawa [1991] claim that their algorithm would still be valid for an interesting extension of PROB-LEM FIVS is that two or more vertex sets each of which is constituted by face independent verticesafter a little modification.
No other researchers refer to This work.
2.2.3 An algorithm modifies PQ-trees to embed graphs into planarities. Haeupler and Tarjan [2008]refer to Booth and Lueker [1976], Boyer et al. [2004], Boyer and Myrvold [1999], Shih and Hsu [1993]and Wei-Kuan and Wen-Lian [1999].
Haeupler and Tarjan [2008] states that Shih and Hsu [1993] did not address important implemen-tation issues, and citeNshih1999 gave incorrect algorithms, [Boyer et al. 2004] finally gave a correctversion of the Shih-Hsu algorithm.
Haeupler and Tarjan [2008] present a linear-time algorithm which not only embeds graphs intoplanarity but also counts the embedding, generates a Kuratowski subgraph of a non-planar graph,and show all of the embedding. This algorithm modified Booth and Luekers PQ-tree data structureto track all possible embedding. The authors introduce two sections about the algorithm, first wasPlanarity testing via Vertex addition, the new algorithm avoids backtracking in Planarity Testingvia Vertex Addition, which requires maintaining all possible embedding of the half-embedded edge.The authors state that it is not difficult to maintain all possible embedding, since different faces ofthe partial embedding include half-embedded edges. After the vertex addition, the partial connectedcomponents are combined into single connected component; second is Circular Orders via PQ-trees, theauthors reinterpret PQ-tree to represent the PQ-tree sets of circular order instead of linear order, for agiven PQ-tree, authors add a new root which child is the original root and called this new root specialleaf, the leaf order of the augmented tree is circular order, begin with the special leaf, lists other leavesin circular order, then return to special leaf.
Haeupler and Tarjan [2008] used depth-first search on all connected component of the input graphand PQ-tree was used to test planarity, in order to implement the abstract planarity testing method. APQ-tree and a set of PQ-tree leaves S(v) was included in the every ancestor v in the depth-first spanningtree of the current vertex of the search. For different kinds of arcs, make different performances: for atree arc (v,w), a PQ-tree for w which made up by a root and a single child was constructed; for a back
, Vol. V, No. N, Article 1, Publication date: January 20YY.
1:8 • Zhigang Jiang
arc(v, w ), a leaf child, (v ,w), was added to the P-node for v, and to S(w); when back to the tree arc(v,w),the PQ-tree for w should be reduced.
Haeupler and Tarjan [2008] claim that their algorithm is more practical, since it can work for undi-rected graphs which have multiple edges, loops and more than one connected component.
Haeupler and Tarjan [2008] claim that their algorithm can complete in linear time, and presentall possible embedding. During the implementation, the algorithm also produces a signal embeddingor count embedding. The ordering problems, linear or circular order, can be effectively solved by thePQ-trees which interpreted by authors.
No other researchers refer to This work.
, Vol. V, No. N, Article 1, Publication date: January 20YY.
Algorithms for Tesing and Embedding Planar Graphs • 1:9
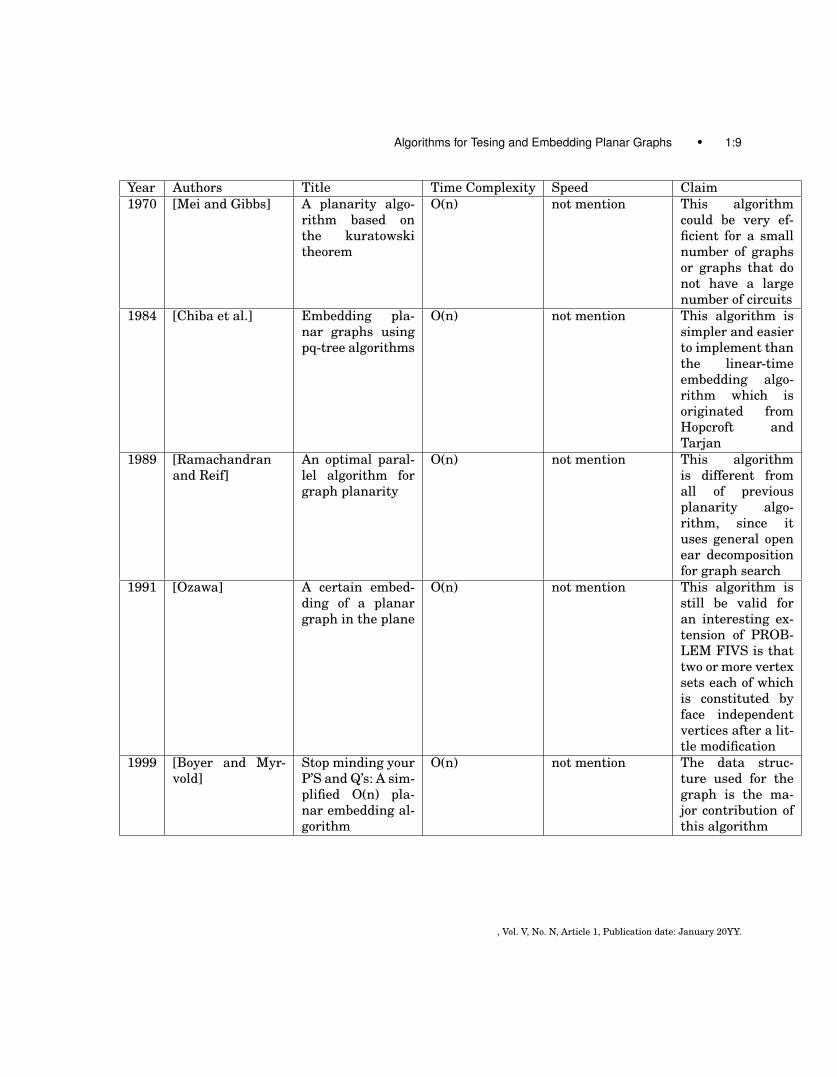
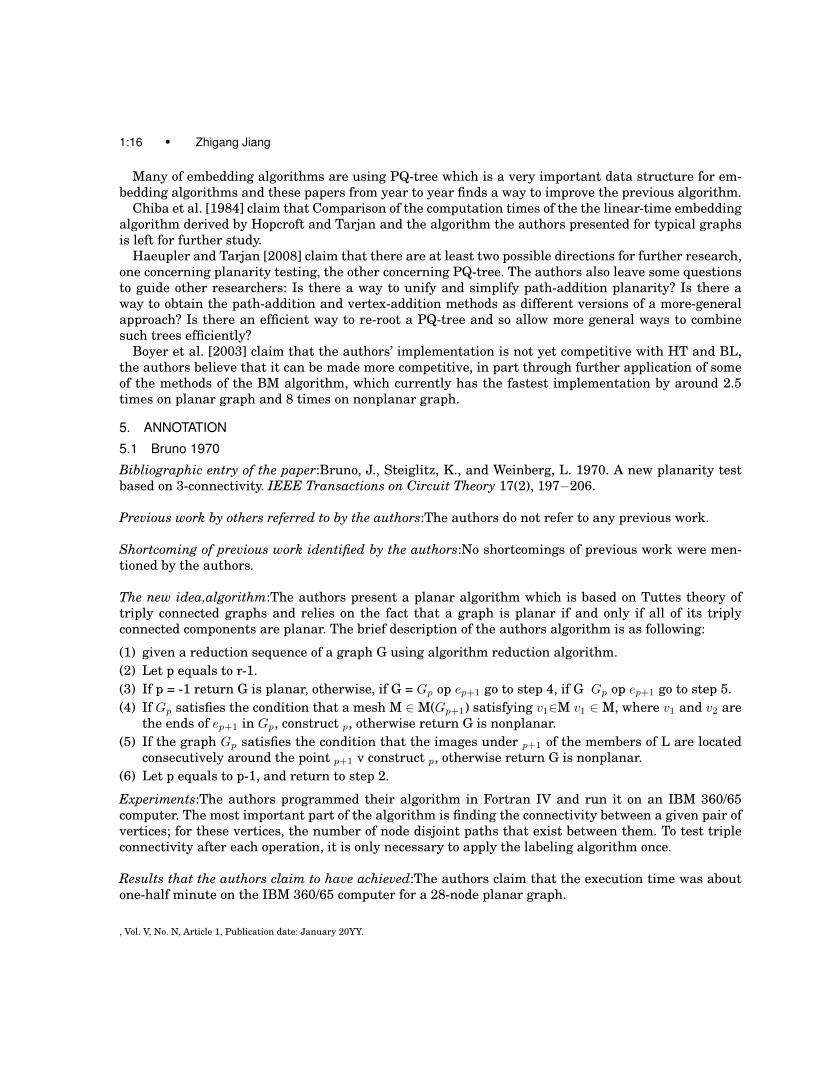
Year Authors Title Time Complexity Speed Claim1970 [Mei and Gibbs] A planarity algo-
rithm based onthe kuratowskitheorem
O(n) not mention This algorithmcould be very ef-ficient for a smallnumber of graphsor graphs that donot have a largenumber of circuits
1984 [Chiba et al.] Embedding pla-nar graphs usingpq-tree algorithms
O(n) not mention This algorithm issimpler and easierto implement thanthe linear-timeembedding algo-rithm which isoriginated fromHopcroft andTarjan
1989 [Ramachandranand Reif]
An optimal paral-lel algorithm forgraph planarity
O(n) not mention This algorithmis different fromall of previousplanarity algo-rithm, since ituses general openear decompositionfor graph search
1991 [Ozawa] A certain embed-ding of a planargraph in the plane
O(n) not mention This algorithm isstill be valid foran interesting ex-tension of PROB-LEM FIVS is thattwo or more vertexsets each of whichis constituted byface independentvertices after a lit-tle modification
1999 [Boyer and Myr-vold]
Stop minding yourP’S and Q’s: A sim-plified O(n) pla-nar embedding al-gorithm
O(n) not mention The data struc-ture used for thegraph is the ma-jor contribution ofthis algorithm
, Vol. V, No. N, Article 1, Publication date: January 20YY.
1:10 • Zhigang Jiang
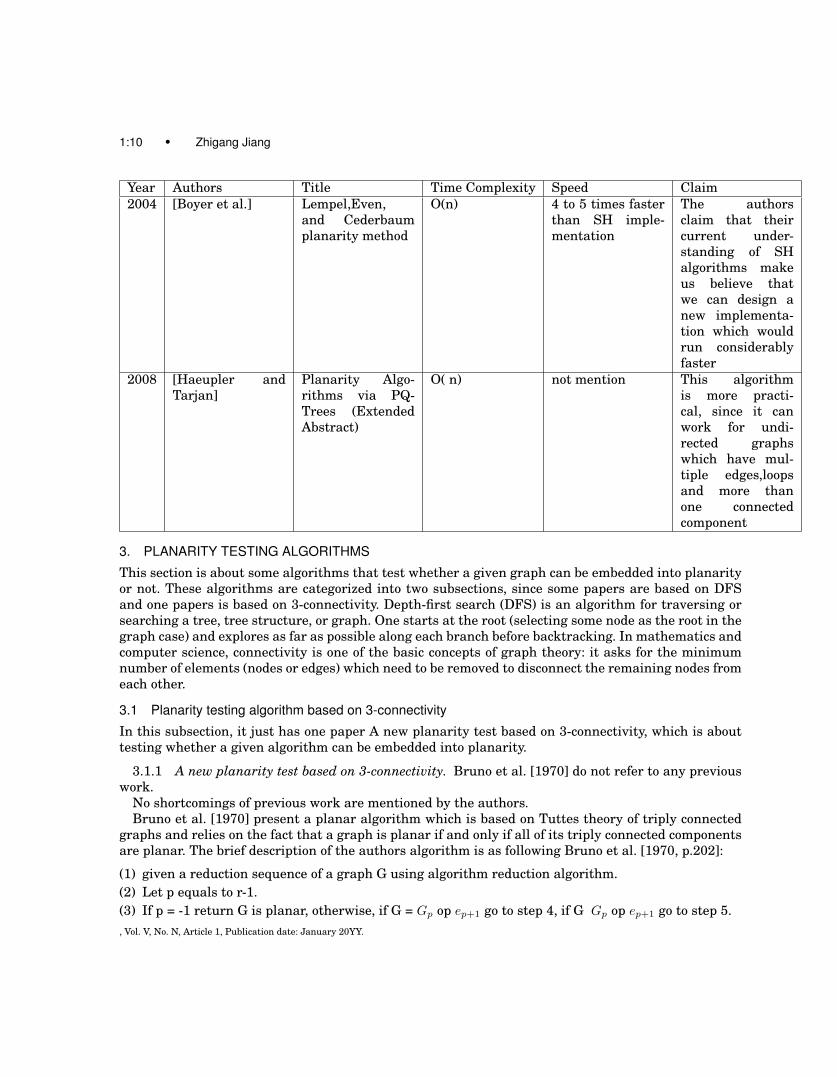
Year Authors Title Time Complexity Speed Claim2004 [Boyer et al.] Lempel,Even,
and Cederbaumplanarity method
O(n) 4 to 5 times fasterthan SH imple-mentation
The authorsclaim that theircurrent under-standing of SHalgorithms makeus believe thatwe can design anew implementa-tion which wouldrun considerablyfaster
2008 [Haeupler andTarjan]
Planarity Algo-rithms via PQ-Trees (ExtendedAbstract)
O( n) not mention This algorithmis more practi-cal, since it canwork for undi-rected graphswhich have mul-tiple edges,loopsand more thanone connectedcomponent
3. PLANARITY TESTING ALGORITHMS
This section is about some algorithms that test whether a given graph can be embedded into planarityor not. These algorithms are categorized into two subsections, since some papers are based on DFSand one papers is based on 3-connectivity. Depth-first search (DFS) is an algorithm for traversing orsearching a tree, tree structure, or graph. One starts at the root (selecting some node as the root in thegraph case) and explores as far as possible along each branch before backtracking. In mathematics andcomputer science, connectivity is one of the basic concepts of graph theory: it asks for the minimumnumber of elements (nodes or edges) which need to be removed to disconnect the remaining nodes fromeach other.
3.1 Planarity testing algorithm based on 3-connectivity
In this subsection, it just has one paper A new planarity test based on 3-connectivity, which is abouttesting whether a given algorithm can be embedded into planarity.
3.1.1 A new planarity test based on 3-connectivity. Bruno et al. [1970] do not refer to any previouswork.
No shortcomings of previous work are mentioned by the authors.Bruno et al. [1970] present a planar algorithm which is based on Tuttes theory of triply connected
graphs and relies on the fact that a graph is planar if and only if all of its triply connected componentsare planar. The brief description of the authors algorithm is as following Bruno et al. [1970, p.202]:
(1) given a reduction sequence of a graph G using algorithm reduction algorithm.(2) Let p equals to r-1.(3) If p = -1 return G is planar, otherwise, if G = Gp op ep+1 go to step 4, if G Gp op ep+1 go to step 5., Vol. V, No. N, Article 1, Publication date: January 20YY.
Algorithms for Tesing and Embedding Planar Graphs • 1:11
(4) If Gp satisfies the condition that a mesh M ∈M(Gp+1) satisfying v1∈M v1 ∈M, where v1 and v2 arethe ends of ep+1 in Gp, construct p, otherwise return G is nonplanar.
(5) If the graph Gp satisfies the condition that the images under p+1 of the members of L are locatedconsecutively around the point p+1 v construct p, otherwise return G is nonplanar.
(6) Let p equals to p-1, and return to step 2.
Bruno et al. [1970] programmed their algorithm in Fortran IV and ran it on an IBM 360/65 computer.The most important part of the algorithm is finding the connectivity between a given pair of vertices;for these vertices, the number of node disjoint paths that exist between them. To test triple connectivityafter each operation, it is only necessary to apply the labeling algorithm once.
Bruno et al. [1970] claim that the execution time was about one-half minute on the IBM 360/65computer for a 28-node planar graph.
Bruno et al. [1970] claim that their algorithm tests the planarity of a large graph by splitting processin which a large graph is naturally broken down into a series of tests on a set of much smaller graph,and these graphs being a set of simple, triply connected graphs.
No other researchers refer to This work.
3.2 Planarity testing algorithms based on DFS
In this subsection, there are two papers about testing whether a given graph can be embedded intoplanarity or not, and these algorithms are based on DFS. The two papers are in this subsection are: Ef-ficient planarity testing, and A simple test for planar graphs. The time efficiency and space usage of thealgorithm in the first paper are dramatically improved, compare with the algorithm of Bruno,Steiglitzamd Weinberg, this algorithm can test the connectivity property of a graph. The time complexity ofthe algorithm in the sccondary paper in O(m+n), where m is the number of edges in a graph, n is thenumber of vertices of the graph, and this algorithm uses Kuratowskis theorem very explicitly.
3.2.1 An algorithm uses DFS to test the planarity of a graph. Hopcroft and Tarjan [1974] do notrefer to any previous work.
Hopcroft and Tarjan [1974] state that little previous work has been directed toward a rigorous anal-ysis of their running times.
In this paper,Hopcroft and Tarjan [1974] present a very efficient algorithm to test whether a givengraph can be embedded in the plane. This algorithm include two steps: firstly, deleting the graphs withtoo many edges, since the planar graph with the number of edges less than 3V-3; finally, divide thegraph into undirected graph, and test whether all components are planar graph or not, because allsubgraphs of planar graph are planar graph. The authors use DFS to test the planarity of every com-ponent, converting the graph into a palm tree and numbering vertices. The authors get the subgraphby finding a cycle in the graph and delete it, then the whole graph divided into several pieces. For eachrecursive call of the algorithm, we should find a cycle in the piece of the graph to test the planarity.This cycle consist of a path edge not in the previously found cycles and a path edge in the old cycle.
Hopcroft and Tarjan [1974] programmed their algorithm in ALGOL W, the Stanford University ver-sion of ALGOL, to test the availability of this algorithm. In the program the inpute graphs are gen-erated randomly. The test results show that the test can be completed in T = 0.0125V 0.07(T is therunning time (seconds); V is the number of vertices.
Hopcroft and Tarjan [1974] state that since implementation and machine is greatly varied, it is verydifficult to compare the experimental running time of different algorithms. However, Compare with thealgorithm of Bruno, Steiglitz and Weinberg, the algorithm are dramatically improved in time efficiencyand space usage in testing the same amount of data. The time complexity of this algorithm is O(n).
, Vol. V, No. N, Article 1, Publication date: January 20YY.
1:12 • Zhigang Jiang
Hopcroft and Tarjan [1974] claim that their algorithm is just for testing a graph G for planarity,but it can construct a planar representation for graph G after a little modification. This algorithm cancombine with other algorithms to test the connectivity property of a graph, and also can combine withan algorithm of Hopcrofts to test isomorphism of triconnected planar graphs.
Hopcroft and Tarjan [1974] is cited by: Chiba et al. [1984], Ramachandran and Reif [1989], Shih andHsu [1993],Boyer and Myrvold [1999] and Boyer et al. [2004]
3.2.2 A simple planarity testing algorithm based on DFS search tree and modified Vertex additionapproach. Shih and Hsu [1993] refer to Hopcroft and Tarjan [1974].
Shih and Hsu [1993] claim that the approaches of the algorithm designed by Hopcroft and Tarjan,and by Booth and Lueker are quite complex.
Shih and Hsu [1993] develop a new planarity testing algorithm which is only based on a depth-firstsearch tree. The key approach of this algorithm is to add vertices according to a postordering obtainedfrom a depth-first search tree. The authors modified Vertex addition approach which only require thatthose vertices not added induce a connected subgraph, which is a simple postordering of a depth-firstsearch tree of G suffices. The embedding procedure of this algorithm contains two sections:
(1) A Special case of the embedding.
In this case, we can move all edges of E1 in the current embedding and place them on side 2without affecting planarity.
(2) The general embedding.
In this case, path p contains some c-nodes, to embed this kind of graph, the authors contractvertices in the c-node.
The key saving in our algorithm is that, in each c-node h of a maximal adjacent path, the set of markedvertices with zero external degree in C(h) must be arranged consecutively and hence, can be easilydetermined.
Shih and Hsu [1993] state that the complexity of the algorithm is O(m+n).Shih and Hsu [1993] claim that their algorithm uses Kuratowskis theorem very explicitly ,and
the embedding of the planar biconnected components constructed at each iteration never have to bechanged.
Shih and Hsu [1993] is cited by: Boyer et al. [2004], and ?]., Vol. V, No. N, Article 1, Publication date: January 20YY.
Algorithms for Tesing and Embedding Planar Graphs • 1:13
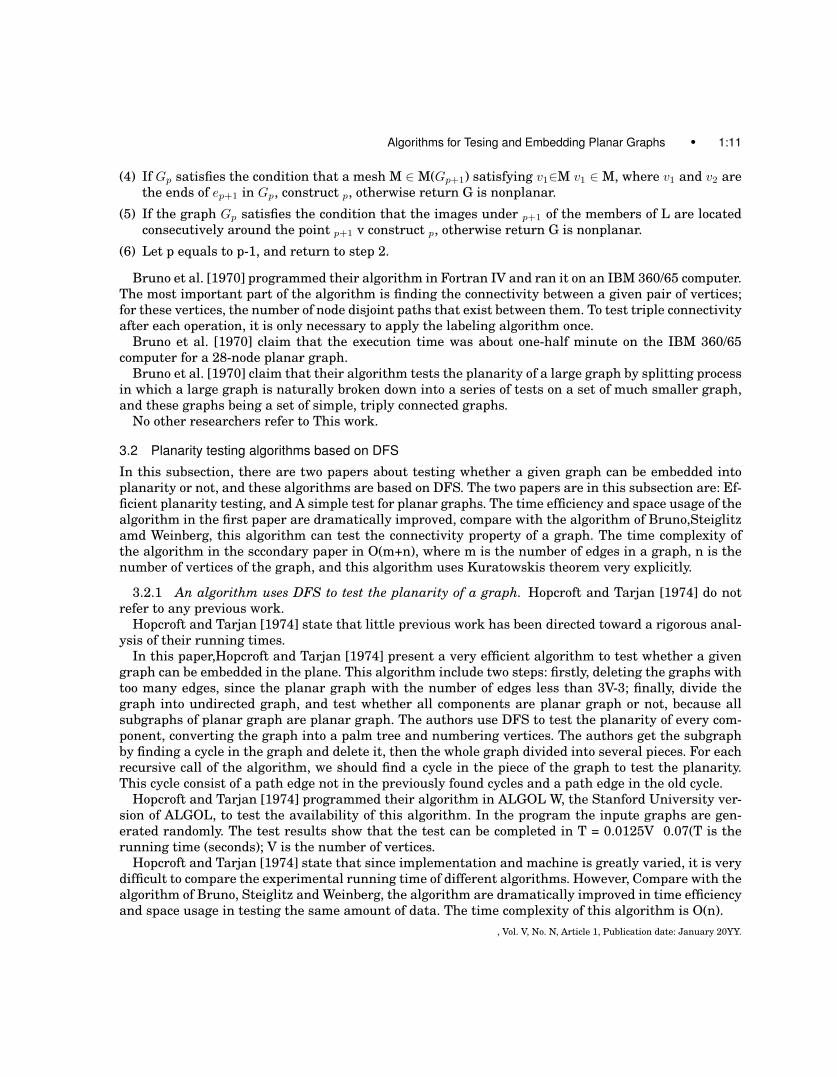
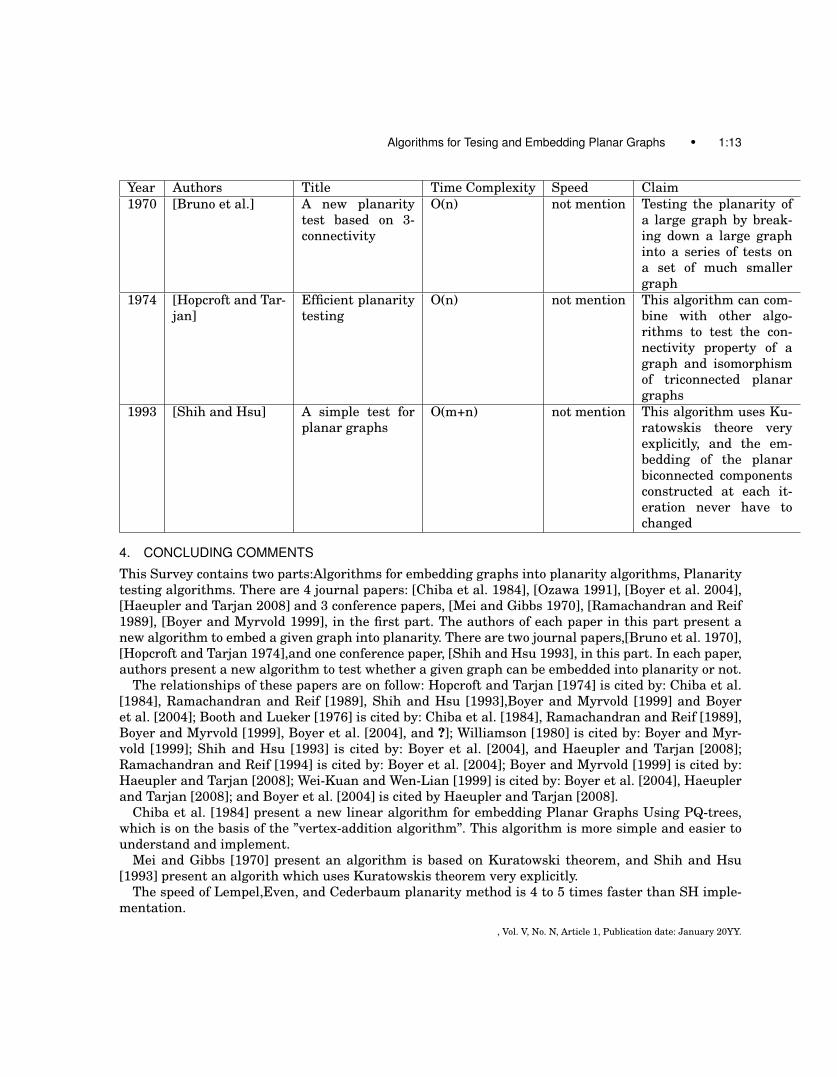
Year Authors Title Time Complexity Speed Claim1970 [Bruno et al.] A new planarity
test based on 3-connectivity
O(n) not mention Testing the planarity ofa large graph by break-ing down a large graphinto a series of tests ona set of much smallergraph
1974 [Hopcroft and Tar-jan]
Efficient planaritytesting
O(n) not mention This algorithm can com-bine with other algo-rithms to test the con-nectivity property of agraph and isomorphismof triconnected planargraphs
1993 [Shih and Hsu] A simple test forplanar graphs
O(m+n) not mention This algorithm uses Ku-ratowskis theore veryexplicitly, and the em-bedding of the planarbiconnected componentsconstructed at each it-eration never have tochanged
4. CONCLUDING COMMENTS
This Survey contains two parts:Algorithms for embedding graphs into planarity algorithms, Planaritytesting algorithms. There are 4 journal papers: [Chiba et al. 1984], [Ozawa 1991], [Boyer et al. 2004],[Haeupler and Tarjan 2008] and 3 conference papers, [Mei and Gibbs 1970], [Ramachandran and Reif1989], [Boyer and Myrvold 1999], in the first part. The authors of each paper in this part present anew algorithm to embed a given graph into planarity. There are two journal papers,[Bruno et al. 1970],[Hopcroft and Tarjan 1974],and one conference paper, [Shih and Hsu 1993], in this part. In each paper,authors present a new algorithm to test whether a given graph can be embedded into planarity or not.
The relationships of these papers are on follow: Hopcroft and Tarjan [1974] is cited by: Chiba et al.[1984], Ramachandran and Reif [1989], Shih and Hsu [1993],Boyer and Myrvold [1999] and Boyeret al. [2004]; Booth and Lueker [1976] is cited by: Chiba et al. [1984], Ramachandran and Reif [1989],Boyer and Myrvold [1999], Boyer et al. [2004], and ?]; Williamson [1980] is cited by: Boyer and Myr-vold [1999]; Shih and Hsu [1993] is cited by: Boyer et al. [2004], and Haeupler and Tarjan [2008];Ramachandran and Reif [1994] is cited by: Boyer et al. [2004]; Boyer and Myrvold [1999] is cited by:Haeupler and Tarjan [2008]; Wei-Kuan and Wen-Lian [1999] is cited by: Boyer et al. [2004], Haeuplerand Tarjan [2008]; and Boyer et al. [2004] is cited by Haeupler and Tarjan [2008].
Chiba et al. [1984] present a new linear algorithm for embedding Planar Graphs Using PQ-trees,which is on the basis of the ”vertex-addition algorithm”. This algorithm is more simple and easier tounderstand and implement.
Mei and Gibbs [1970] present an algorithm is based on Kuratowski theorem, and Shih and Hsu[1993] present an algorith which uses Kuratowskis theorem very explicitly.
The speed of Lempel,Even, and Cederbaum planarity method is 4 to 5 times faster than SH imple-mentation.
, Vol. V, No. N, Article 1, Publication date: January 20YY.
1:14 • Zhigang Jiang
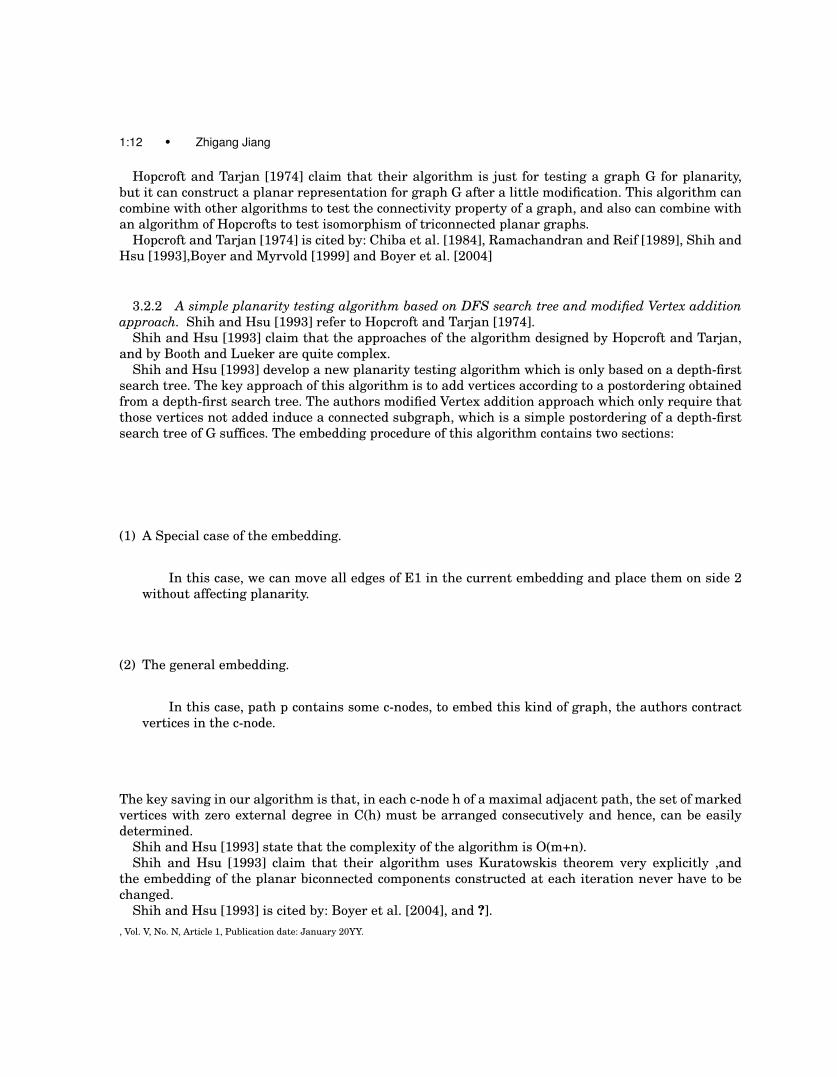
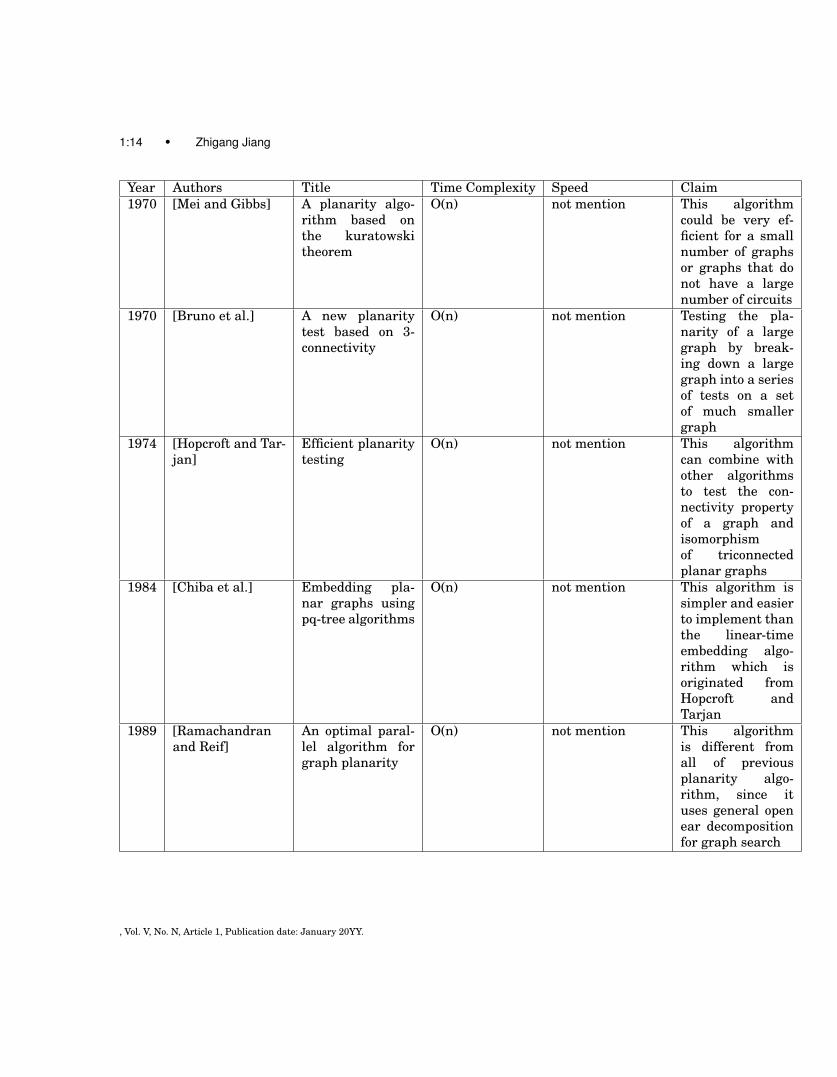
Year Authors Title Time Complexity Speed Claim1970 [Mei and Gibbs] A planarity algo-
rithm based onthe kuratowskitheorem
O(n) not mention This algorithmcould be very ef-ficient for a smallnumber of graphsor graphs that donot have a largenumber of circuits
1970 [Bruno et al.] A new planaritytest based on 3-connectivity
O(n) not mention Testing the pla-narity of a largegraph by break-ing down a largegraph into a seriesof tests on a setof much smallergraph
1974 [Hopcroft and Tar-jan]
Efficient planaritytesting
O(n) not mention This algorithmcan combine withother algorithmsto test the con-nectivity propertyof a graph andisomorphismof triconnectedplanar graphs
1984 [Chiba et al.] Embedding pla-nar graphs usingpq-tree algorithms
O(n) not mention This algorithm issimpler and easierto implement thanthe linear-timeembedding algo-rithm which isoriginated fromHopcroft andTarjan
1989 [Ramachandranand Reif]
An optimal paral-lel algorithm forgraph planarity
O(n) not mention This algorithmis different fromall of previousplanarity algo-rithm, since ituses general openear decompositionfor graph search
, Vol. V, No. N, Article 1, Publication date: January 20YY.
Algorithms for Tesing and Embedding Planar Graphs • 1:15
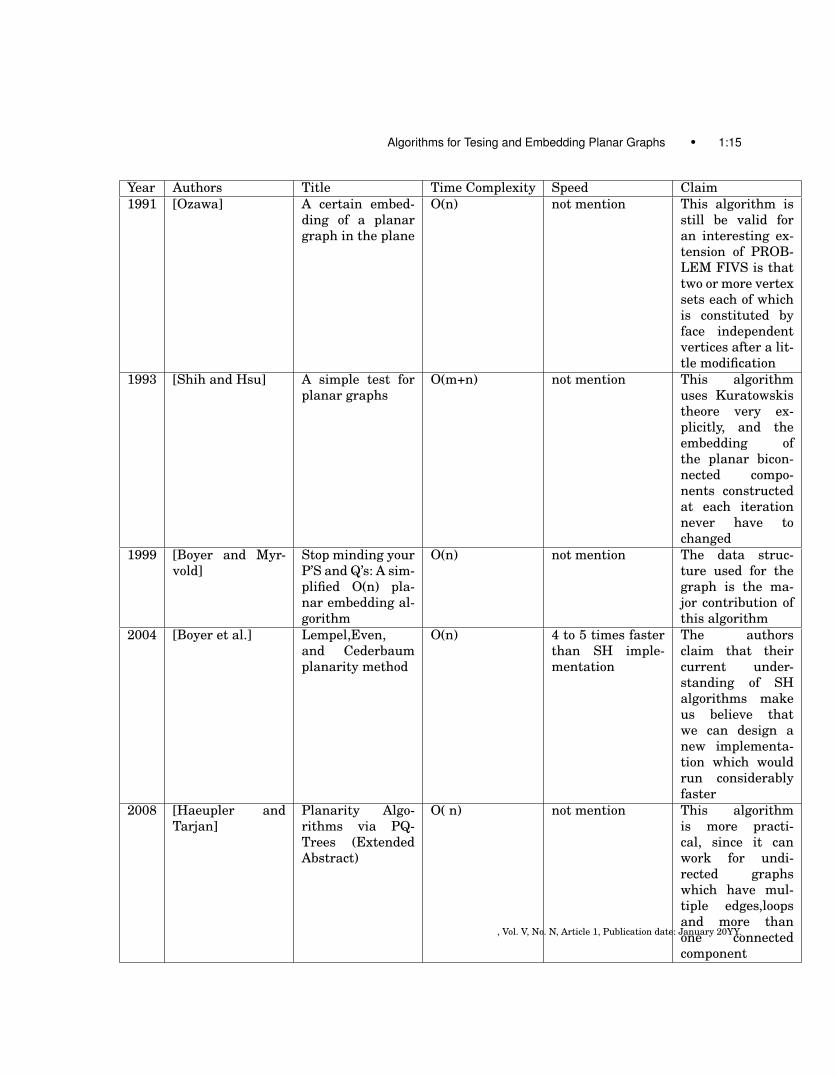
Year Authors Title Time Complexity Speed Claim1991 [Ozawa] A certain embed-
ding of a planargraph in the plane
O(n) not mention This algorithm isstill be valid foran interesting ex-tension of PROB-LEM FIVS is thattwo or more vertexsets each of whichis constituted byface independentvertices after a lit-tle modification
1993 [Shih and Hsu] A simple test forplanar graphs
O(m+n) not mention This algorithmuses Kuratowskistheore very ex-plicitly, and theembedding ofthe planar bicon-nected compo-nents constructedat each iterationnever have tochanged
1999 [Boyer and Myr-vold]
Stop minding yourP’S and Q’s: A sim-plified O(n) pla-nar embedding al-gorithm
O(n) not mention The data struc-ture used for thegraph is the ma-jor contribution ofthis algorithm
2004 [Boyer et al.] Lempel,Even,and Cederbaumplanarity method
O(n) 4 to 5 times fasterthan SH imple-mentation
The authorsclaim that theircurrent under-standing of SHalgorithms makeus believe thatwe can design anew implementa-tion which wouldrun considerablyfaster
2008 [Haeupler andTarjan]
Planarity Algo-rithms via PQ-Trees (ExtendedAbstract)
O( n) not mention This algorithmis more practi-cal, since it canwork for undi-rected graphswhich have mul-tiple edges,loopsand more thanone connectedcomponent
, Vol. V, No. N, Article 1, Publication date: January 20YY.
1:16 • Zhigang Jiang
Many of embedding algorithms are using PQ-tree which is a very important data structure for em-bedding algorithms and these papers from year to year finds a way to improve the previous algorithm.
Chiba et al. [1984] claim that Comparison of the computation times of the the linear-time embeddingalgorithm derived by Hopcroft and Tarjan and the algorithm the authors presented for typical graphsis left for further study.
Haeupler and Tarjan [2008] claim that there are at least two possible directions for further research,one concerning planarity testing, the other concerning PQ-tree. The authors also leave some questionsto guide other researchers: Is there a way to unify and simplify path-addition planarity? Is there away to obtain the path-addition and vertex-addition methods as different versions of a more-generalapproach? Is there an efficient way to re-root a PQ-tree and so allow more general ways to combinesuch trees efficiently?
Boyer et al. [2003] claim that the authors’ implementation is not yet competitive with HT and BL,the authors believe that it can be made more competitive, in part through further application of someof the methods of the BM algorithm, which currently has the fastest implementation by around 2.5times on planar graph and 8 times on nonplanar graph.
5. ANNOTATION
5.1 Bruno 1970
Bibliographic entry of the paper:Bruno, J., Steiglitz, K., and Weinberg, L. 1970. A new planarity testbased on 3-connectivity. IEEE Transactions on Circuit Theory 17(2), 197−206.
Previous work by others referred to by the authors:The authors do not refer to any previous work.
Shortcoming of previous work identified by the authors:No shortcomings of previous work were men-tioned by the authors.
The new idea,algorithm:The authors present a planar algorithm which is based on Tuttes theory oftriply connected graphs and relies on the fact that a graph is planar if and only if all of its triplyconnected components are planar. The brief description of the authors algorithm is as following:
(1) given a reduction sequence of a graph G using algorithm reduction algorithm.(2) Let p equals to r-1.(3) If p = -1 return G is planar, otherwise, if G = Gp op ep+1 go to step 4, if G Gp op ep+1 go to step 5.(4) If Gp satisfies the condition that a mesh M ∈M(Gp+1) satisfying v1∈M v1 ∈M, where v1 and v2 are
the ends of ep+1 in Gp, construct p, otherwise return G is nonplanar.(5) If the graph Gp satisfies the condition that the images under p+1 of the members of L are located
consecutively around the point p+1 v construct p, otherwise return G is nonplanar.(6) Let p equals to p-1, and return to step 2.
Experiments:The authors programmed their algorithm in Fortran IV and run it on an IBM 360/65computer. The most important part of the algorithm is finding the connectivity between a given pair ofvertices; for these vertices, the number of node disjoint paths that exist between them. To test tripleconnectivity after each operation, it is only necessary to apply the labeling algorithm once.
Results that the authors claim to have achieved:The authors claim that the execution time was aboutone-half minute on the IBM 360/65 computer for a 28-node planar graph.
, Vol. V, No. N, Article 1, Publication date: January 20YY.
Algorithms for Tesing and Embedding Planar Graphs • 1:17
Claims made by the authors with respect to the contribution that they have made:The authors claimthat their algorithm test the planarity of a large graph by splitting process in which a large graph isnaturally broken down into a series of tests on a set of much smaller graph, and these graphs being aset of simple, triply connected graphs.
5.2 Boyer 1999
Bibliographic entry of the paper:Boyer, J. and Myrvold, W. 1999. Stop minding your ps and qs: A sim-plified o (n) planar embedding algorithm. In Proceedings of the tenth annual ACM-SIAM symposiumonDiscrete algorithms. Society for Industrial and Applied Mathematics, 140−146.
Previous work by others referred to by the authors:The authors refer to Hopcroft and Tarjan [1974],Boothand Lueker [1976] and Williamson [1980].
Shortcoming of previous work identified by the authors:The authors state that the other linear timeplanar embedding algorithms are quite complicated compare with their algorithm.
The new idea,algorithm:The authors represent a new planar graph embedding algorithm for bicon-nected graphs. The algorithm contains the following steps:
(1) Creating a depth first search tree like any other linear planar embedding algorithm.(2) Adding one edge at one time to the embedding, and stored all of data in a new data structure which
created by authors.(3) Embed each DFS tree edge as a singleton bicomp.(4) Processing the vertices in reverse DFI order.
Experiments or analysis conducted:The authors claim that their new algorithm could reduce the the-oretical complexity of solving graph planarity problems, and make the planar graph embedding algo-rithm more accessible as well as reduce the implementation time dramatically.
Results that the authors claim to have achieved:the authors claim that their new planar embeddingalgorithm is a linear time algorithm, and it is easier to implement.
Claims made by the authors with respect to the contribution that they have made:the authors claimthat the main contribution of their algorithm is the data structure used for the graph.
5.3 Boyer 2004
Bibliographic entry of the paper :Boyer, J., Fernandes, C., Noma, A., and Depina, J. 2004. Lempel, even,and cederbaum planarity method. Experimental and Efficient Algorithms, 129−144.
Previous work by others referred to by the author: The authors refer toHopcroft and Tarjan [1974],Boothand Lueker [1976],Wei-Kuan and Wen-Lian [1999],Shih and Hsu [1993],and Ramachandran and Reif[1994].
Shortcoming of previous work identified by the authors:The authors claim that all of the previous pa-pers regarding planar graph algorithms are very complex.
The new idea, algorithm:In this paper, the authors present a simple pedagogical graph theoretical de-scription of Lempel, Even, and Cederbaum(LEC) planarity method based on concepts due to Thomas.
, Vol. V, No. N, Article 1, Publication date: January 20YY.
1:18 • Zhigang Jiang
(1) The authors introduce some key ingredient used by LEC method.If H is a planar graph, assume F is a subgraph of H, if F is induced by the edges incident to
the external face of a planar embedding of H, we say that F is a frame of H.Assume X and Y are sets of vertices of a frame F of H. A path PT in F with basis S is called an
XY-path, if the endpoints of PT are in X, each vertex of S that sees X through EF \ES is in PT, eachvertex of S that sees Y through EF \ES is in PT, and no component of F VS contains vertices bothin X and in Y .
(2) The authors introduce LEC planarity testing method.LEC method examines the vertices one by one of a given biconnected graph on the basis of
LEC-numbering. In each iteration, the method tries to extend a frame of the subgraph induced bythe already examined vertices. If did not find a frame, this algorithm declares that this graph isnon-planar and stops.
(3) The authors introduce the implementation of SH algorithm.SH algorithm is a linear-time planarity algorithm, and it is very complex to implement. SH
algorithm uses a DFS-numbering rather than a LEC-numbering. If the vertices of G are orderedfrom a DFS-numbering, then the graph G[i+1,,n] is connected i= 1,,n, if there is a frame F of H andH is not connected, then F is also not connected.
Implementation and Experiments:The authors programmed the algorithms in LEDA including the im-plementation of SH algorithm and an implementation of the BM algorithm develop in C.
Results that the authors claim to have achieved:The authors state that BL performs the planaritytest 4 to 5 times faster than SH implementation.
Claims made by the authors with respect to the contribution that they have made:The authors claimthat their current understanding of SH algorithms make us believe that we can design a new imple-mentation which would run considerably faster.
5.4 Chiba 1984
Bibliographic entry of the paper::Chiba, N., Nishizeki, T., Abe, S., and Ozawa, T. 1984. Embeddingplanar graphs using pq-tree algorithms. Electronics and Communications in Japan (Part I: Communi-cations) 67, 7, 1220.
previous work by others referred to by the authors:The authors refer to Booth and Lueker [1976] andHopcroft and Tarjan [1974].
Shortcoming of previous work identified by the authors:The authors state that one part of Hopcroftand Tarjans ”path-addition” algorithm for embedding an intractable path called ”special path” is com-plicated and difficult to implement.
The new algorithm:The author presented a new linear algorithm for embedding Planar Graphs UsingPQ-tree, which is on the basis of the ”vertex-addition algorithm”. And this algorithm is more simpleand easier to understand or implement, compare with Hopcroft and Tarjans ”path-addition” algorithm.The PQ-tree data structure is often used to embed an undirected graph into planarity, the author ispresented a new algorithm to embed a directed graph into planarity. Although this algorithm is basedon the planarity testing algorithm using a PQ-tree, the authors devise one part of the original algo-rithm, the bush form corresponding to the PQ-tree is updated while simplifying the PQ-tree. Firstly,, Vol. V, No. N, Article 1, Publication date: January 20YY.
Algorithms for Tesing and Embedding Planar Graphs • 1:19
getting A u, during this procedure all of the vertices smaller or larger than the vertex v are embeddedaround v; secondly getting upward embedding A U, in this procedure, the authors use a direction flag”v” to express the direction of the adjacency list and to trace how the Q-vertex is inverter, and DFS isused to scan the s-subtree to get the A u(v).
Analysis conducted:The authors analyse their algorithm and claim that it is a simpler algorithm toembed a graph G into planarity, and it is easier to implement.
Results that the authors claim to have achieved: The authors claim that the new algorithm can em-bed a graph G into planarity in linear time.
The contribution that authors have made: The authors claim that their algorithm is simpler and easierto implement than the linear-time embedding algorithm which is originated from Hopcroft and Tarjan.
5.5 Hopcroft 1974
Bibliographic entry of the paper :Hopcroft, J. and Tarjan, R. 1974. Efficient planarity testing. J. ACM21, 549−568.
Previous work by others referred to by the authors:The authors do not refer to any previous work.
Shortcoming of previous work identified by the authors:No shortcomings of previous work were men-tioned by the authors.
The new idea,algorithm:In this paper, authors present a very efficient algorithm to test whether a givengraph can be embedded in the plane. This algorithm include two steps: firstly, deleting the graphs withtoo many edges, since the planar graph with the number of edges less than 3V-3; finally, divide thegraph into undirected graph, and test whether all components are planar graph or not, because allsubgraphs of planar graph are planar graph. The authors use DFS to test the planarity of every com-ponent, converting the graph into a palm tree and numbering vertices. The authors get the subgraphby finding a cycle in the graph and delete it, then the whole graph divided into several pieces. For eachrecursive call of the algorithm, we should find a cycle in the piece of the graph to test the planarity.This cycle consist of a path edge not in the previously found cycles and a path edge in the old cycle.
Implementation and Experiments:The authors programmed their algorithm in ALGOL W, the Stan-ford University version of ALGOL, to test the availability of this algorithm. In the program the inputegraphs are generated randomly. The test results show that the test can be completed in T = 0.0125V0.07(T is the running time (seconds); V is the number of vertices.
Results that the authors claim to have achieved:The authors state that since implementation andmachine is greatly varied, it is very difficult to compare the experimental running time of differentalgorithms. However, Compare with the algorithm of Bruno, Steiglitz and Weinberg, the algorithm aredramatically improved in time efficiency and space usage in testing the same amount of data.
Claims made by the authors with respect to the contribution that they have made:The authors claimthat their algorithm is just for testing a graph G for planarity, but it can construct a planar repre-sentation for graph G after a little modification. This algorithm can combine with other algorithms to
, Vol. V, No. N, Article 1, Publication date: January 20YY.
1:20 • Zhigang Jiang
test the connectivity property of a graph, and also can combine with an algorithm of Hopcrofts to testisomorphism of triconnected planar graphs.
5.6 Haeupler 2008
Bibliographic entry of the paper: Haeupler, B. and Tarjan, R. E. 2008. Planarity algorithms via PQ-trees (extended abstract). Electronic Notes in Discrete Mathematics 31, 0, 143−149.
Previous work by others referred to by the authors: The authors refer to Booth and Lueker [1976],Boyer et al. [2004], Boyer and Myrvold [1999], Shih and Hsu [1993] and Wei-Kuan and Wen-Lian[1999].
Shortcoming of previous work identified by the authors:No shortcomings of previous work were men-tioned by the authors.
The new idea, algortihm:The author presented a linear-time algorithm which not only embeds graphsinto planarity but also counts the embedding, generates a Kuratowski subgraph of a non-planar graph,and show all of the embedding. This algorithm modified Booth and Luekers PQ-tree data structure totrack all possible embedding. The authors introduc two sections about the algorithm, first was Pla-narity testing via Vertex addition, the new algorithm avoids backtracking in Planarity Testing viaVertex Addition, which requires maintaining all possible embedding of the half-embedded edge. Theauthors state that it is not difficult to maintain all possible embedding, since different faces of thepartial embedding include half-embedded edges. After the vertex addition, the partial connected com-ponents are combined into single connected component; second is Circular Orders via PQ-trees, theauthors reinterpret PQ-tree to represent the PQ-tree sets of circular order instead of linear order, for agiven PQ-tree, authors add a new root which child is the original root and called this new root specialleaf, the leaf order of the augmented tree is circular order, begin with the special leaf, lists other leavesin circular order, then return to special leaf.
Experiments:The authors used depth-first search on all connected component of the input graph andPQ-tree was used to test planarity, in order to implement the abstract planarity testing method. A PQ-tree and a set of PQ-tree leaves S(v) was included in the every ancestor v in the depth-first spanningtree of the current vertex of the search. For different kinds of arcs, make different performances: for atree arc (v,w), a PQ-tree for w which made up by a root and a single child was constructed; for a backarc(v, w ), a leaf child, (v ,w), was added to the P-node for v, and to S(w); when back to the tree arc(v,w),the PQ-tree for w should be reduced.
Results that the authors claim to have achieved:The authors claim that their algorithm is more prac-tical, since it can work for undirected graphs which have multiple edges, loops and more than oneconnected component.
Claims made by the authors with respect to the contribution that they have made:The authors claimthat their algorithm can complete in linear time, and present all possible embedding. During the im-plementation, the algorithm also produces a signal embedding or count embedding. The ordering prob-lems, linear or circular order, can be effectively solved by the PQ-trees which interpreted by authors., Vol. V, No. N, Article 1, Publication date: January 20YY.
Algorithms for Tesing and Embedding Planar Graphs • 1:21
5.7 Mei 1970
Bibliographic entry of the paper:: Mei, P. And Gibbs, N. 1970. A planarity algorithm based on the ku-ratowski theorem.emph In Proceedings of the May 5-7, 1970, spring joint computer conference. ACM,91−93.
Previous work by others referred to by the authors:The authors do not refer to any previous work.
Shortcoming of previous work identified by the authors:No shortcomings of previous work were men-tioned by the authors.
The new idea,algorithm:In this paper, authors present an algorithm which is a direct application ofThe Kuratowski Theorem, and based on the observation that a Kuratowski graph can be spanned bythe union of two of its circuits. The details of the algorithm are as follows:
(1) Generate all the circuits of length five or greater, for a given graph G.(2) For any two circuits C1 and C2, let SG(C1) = <V1,C1>and SG(C2) = <V2,C2>. If V1 ∩ V2 has exactly
five elements and C1 ∩ C2 = ∅, go to next step, otherwise, go to step 4.(3) Let (vi1,vi2,vi3,vi4, vi5) be the five elements of V1 ∩ V2 ordered in this cyclic order and Trace SG(C1)
in one direction, trace SG(C2) and check to see whether all of the five elements can be place in acyclic order (vi1,vi2,vi3,vi4, vi5) or not, if it can, SG(C1 ∪ C2) is a K∗5 graph and graph G is non-planar,otherwise, go to last step.
(4) If V1 ∩ V2 has more than five elements and C1 ∩ C2 has more than two elements, go to the step 5,otherwise go to the last step.
(5) Form the vertex adjacency matrix M = (mij) of SG(C1 ∪ C2), if vi,vj 6∈C1 ∪C2, mij = 0; if vi,vj∈C1-C2,mij = 1; if vi,vj∈C2-C1, mij = 2; if vi,vj∈C1 ∩C2, mij = 3.
(6) Check the entries of the matrix row b row once, and result in a cubic graph G = <V, E> with sixvertices.
(7) If there are no more pairs of circuits to be considered the graph G is planar, otherwise go to step 2and choose another pairs of circuits C1 and C2 of G, and go to step 2.
Implementation and Experiments:The authors do not mention any specific implementation or experi-ments.
Results that the authors claim to have achieved:The authors claim that the algorithm could be veryefficient for a small number of graphs or graphs that do not have a large number of circuits, but it isnot efficient for a large graph.
Claims made by the authors with respect to the contribution that they have made:The authors claimthat the first step (the generation of circuits) of the algorithm can be executed first and the generatedcircuits can be stored on some form of auxiliary storage. Then the check for planarity can be executedseparately.
5.8 Ozawa 1991
.Bibliographic entry of the paper: Ozawa, T. 1991. A certain embedding of a planar graph in the plane.In IEEE International Sympoisum on Circuits and Systems,1991. 998−1001.
, Vol. V, No. N, Article 1, Publication date: January 20YY.
1:22 • Zhigang Jiang
Previous work by others referred to by the authors:The authors do not refer to any previous work.
Shortcoming of previous work identified by the authors: No shortcomings of previous work were men-tioned by the authors.
The new algorithm:The authors present an algorithm which is valid for this kind of graph that doesnthave two vertices in the given subset U appears on the some face boundary. This algorithm is based onvertex addition for planarity testing and uses a data structure, PQ-tree, to embed the graph. In thisalgorithm, for a given biconnected planar graph G and a subset U of V, an embedding of G satisfy thefollowing condition: At most one vertex in U appears on a face boundary of the embedding. The PQ-treeimplementation of algorithm EMB contains 2 steps as following:
(1) Construct T1 which is constituted by a P node and leaves corresponding to virtual vertices adjacentto vertex 1..
(2) For node k =1 to node n-1.Reduces T k to T k;Merge all the pertinent leaves to form a new p node and add to it leaves corresponding to the
virtual vertices which are adjacent to vertex k+1.
In the authors algorithm, they modify step 2, the nodes of the pertinent tree are traversed in the post-order and are transformed according to the templates they match. And at the same time node label arealtered.
Analysis conducted:The authors dont mention any analysis about the algorithm.
Results that the authors claim to have achieved:the authors claim that the time complexity of theiralgorithm is O(n) since the change of labels attached to the nodes of PQ-tree and check of COND-INDcan be done without increasing the tome complexity.
The contribution that authors have made:The authors claim that their algorithm would be still valid foran interesting extension of PROBLEM FIVS is that two or more vertex sets each of which is constitutedby face independent vertices after a little modification.
5.9 Ramachandran 1989
Bibliographic entry of the paper:Ramachanadran, V. AND Reif, J. 1989. An optimal parallel algorithmfor graph planarity. In 30th Annual Symposium on Foundations of Computer Science, 1989. 282−287.
Previous work by others referred to by the authors:The authors refer toBooth and Lueker [1976],Hopcroft and Tarjan [1974].
Shortcoming of previous work identified by the authors:The authors state that the best previouslyknown parallel planarity algorithm requires O (log2 n) using O (n) processor, which is not efficientcompared with the authors algorithm.
The new algorithm:The authors present a new parallel algorithm which is based on open ear decompo-sition. To embedding graph into planarity, it includes several steps:, Vol. V, No. N, Article 1, Publication date: January 20YY.
Algorithms for Tesing and Embedding Planar Graphs • 1:23
(1) Find an edge (s, t) in the graph, then find an open ear decomposition starting with(s , t), and obtainthe directed st-numbering graph Gd its spanning tree Td. and the associated open ear decomposi-tion D = [ P ′0,P ′1,P ′1..P ′r−1].
(2) Find clumps of each ear together with the hooks for the anchor bridgelets.(3) Forming the interlacing parity graph for each ear and adding in the link edges to form the con-
straint graph G*.(4) Find a 2-coloring of G*.(5) Given color 0 to the all attachment edges of each ear P ′i whose corresponding real vertices on G*.(6) Find the nesting structure of the bridges assigned to each side of an ear.(7) Compute the number of faces in this combinatorial embedding and determine whether G is planar
or not by Eulers formula.(8) If G is a planar then combine all vertices in LTv into a signle vertex v for each v.
Analysis conducted:The authors analyse their algorithm and claim that the planarity problem can besolved in time O(log n) by their algorithm.
Results that the authors claim to have achieved:The authors claim that all of the steps in this algo-rithm can be performed in linear sequential time. Therefore, it gives a new linear time sequentialalgorithm for planarity.
The contribution that authors have made:The authors claim that their algorithm is different fromall of previous planarity algorithm, since it uses general open ear decomposition for graph search.
5.10 Shih 1993
Bibliographic entry of the paper: Shih, W. and Hsu, W. 1993. A simple test for planar graphs. emphInProceedings of the International Workshop on Discrete Mathematics and Algorithms. 110−122.
Previous work by others referred to by the authorsr:The authors refer to Hopcroft and Tarjan [1974].
Shortcoming of previous work identified by the authors:the authors claim that the approaches of thealgorithm designed by Hopcroft and Tarjan, and by Booth and Lueker are quite involved.
The new idea, algorithm:The authors develop a new planarity testing algorithm which is only based ona depth-first search tree. The key approach of this algorithm is to add vertices according to a postorder-ing obtained from a depth-first search tree. The authors modified Vertex addition approach which onlyrequire that those vertices not added induce a connected subgraph, which is a simple postordering of adepth-first search tree of G suffices. The embedding procedure of this algorithm contains two sections:
(1) A Special case of the embedding.In this case, we can move all edges of E1 in the current embedding and place them on side 2 withoutaffecting planarity.
(2) The general embedding.In this case, path p contains some c-nodes, to embed this kind of graph, the authors contract ver-tices in the c-node.
Implementation and Experiments:The key saving in our algorithm is that, in each c-node h of a max-imal adjacent path, the set of marked vertices with zero external degree in C(h) must be arranged
, Vol. V, No. N, Article 1, Publication date: January 20YY.
1:24 • Zhigang Jiang
consecutively and hence, can be easily determined.
Results that the authors claim to have achieved:The authors state that the complexity of the algo-rithm is O(m+n).
Claims made by the authors with respect to the contribution that they have made:The authors claimthat their algorithm uses Kuratowskis theorem very explicitly ,and the embedding of the planar bicon-nected components constructed at each iteration never have to be changed.
REFERENCES
BOOTH, K. S. AND LUEKER, G. S. 1976. Testing for the consecutive ones property interval graphs and graph planarity usingpq-tree algorithms. Journal of Computer and System Sciences 13, 3, 335 – 379.
BOYER, J., FERNANDES, C., NOMA, A., AND DE PINA, J. 2004. Lempel, even, and cederbaum planarity method. Experimentaland Efficient Algorithms, 129–144.
BOYER, J., FERNANDES, C., NOMA, A., AND DE PINA JR, J. 2003. Correcting and implementing the pc-tree planarity algorithm.BOYER, J. AND MYRVOLD, W. 1999. Stop minding your p’s and q’s: A simplified o (n) planar embedding algorithm. In Proceedings
of the tenth annual ACM-SIAM Symposium on Discrete algorithms. Society for Industrial and Applied Mathematics, 140–146.BRUNO, J., STEIGLITZ, K., AND WEINBERG, L. 1970. A new planarity test based on 3-connectivity. IEEE Transactions on
Circuit Theory 17, 2, 197–206.CHIBA, N., NISHIZEKI, T., ABE, S., AND OZAWA, T. 1984. Embedding planar graphs using pq-tree algorithms. Electronics and
Communications in Japan (Part I: Communications) 67, 7, 12–20.HAEUPLER, B. AND TARJAN, R. E. 2008. Planarity algorithms via pq-trees (extended abstract). Electronic Notes in Discrete
Mathematics 31, 0, 143 – 149.HOPCROFT, J. AND TARJAN, R. 1974. Efficient planarity testing. J. ACM 21, 549–568.JIANER AND CHEN. 1997. Algorithmic graph embeddings. Theoretical Computer Science 181, 2, 247 – 266.JUVAN, M., MARINCEK, J., AND MOHAR, B. 1997. Elimination of local bridges. Math. Slovaca 47, 85–92.KAWARABAYASHI, K.-I. 2009. Planarity allowing few error vertices in linear time. In 50th Annual IEEE Symposium on Foun-
dations of Computer Science, 2009. FOCS ’09. 639 –648.KAWARABAYASHI, K.-I., MOHAR, B., AND REED, B. 2008. A simpler linear time algorithm for embedding graphs into an
arbitrary surface and the genus of graphs of bounded tree-width. In IEEE 49th Annual IEEE Symposium on Foundations ofComputer Science, 2008. FOCS ’08. 771 –780.
MEI, P. AND GIBBS, N. 1970. A planarity algorithm based on the kuratowski theorem. In Proceedings of the May 5-7, 1970,Spring Joint Computer Conference. ACM, 91–93.
OZAWA, T. 1991. A certain embedding of a planar graph in the plane. In IEEE International Sympoisum on Circuits andSystems, 1991. 998 –1001 vol.2.
PERUNICIC, B. AND DURIC, Z. 1985. An efficient algorithm for embedding graphs in the projective plane. In Graph theory withapplications to algorithms and computer science. John Wiley & Sons, Inc., 637–650.
RAMACHANDRAN, V. AND REIF, J. 1989. An optimal parallel algorithm for graph planarity. In 30th Annual Symposium onFoundations of Computer Science, 1989. IEEE, Los Alamitos, CA, 282–287.
RAMACHANDRAN, V. AND REIF, J. 1994. Planarity testing in parallel. Journal of Computer and System Sciences 49, 3, 517 –561.
SHIH, W. AND HSU, W. 1993. A simple test for planar graphs. In Proceedings of the International Workshop on DiscreteMathematics and Algorithms. Hong Kong, 110–122.
WEI-KUAN, S. AND WEN-LIAN, H. 1999. A new planarity test. Theoretical Computer Science 223, 179 – 191.WILLIAMSON, S. 1980. Embedding graphs in the plane algorithmic aspects. Annals of Discrete Mathematics 6, 349–384.
, Vol. V, No. N, Article 1, Publication date: January 20YY.