all teams overview: team:topics 1 overview chapter 1: from teleoperation to autonomy chapter 2: the...
Post on 21-Dec-2015
220 views
TRANSCRIPT
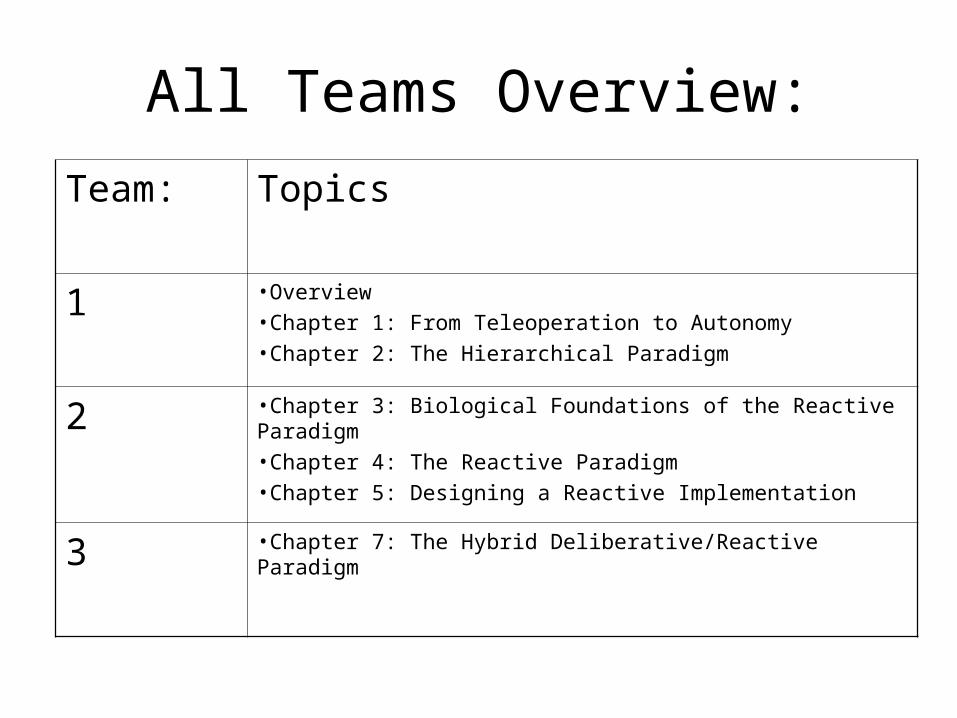
All Teams Overview:
Team: Topics
1 •Overview•Chapter 1: From Teleoperation to Autonomy•Chapter 2: The Hierarchical Paradigm
2 •Chapter 3: Biological Foundations of the Reactive Paradigm•Chapter 4: The Reactive Paradigm•Chapter 5: Designing a Reactive Implementation
3 •Chapter 7: The Hybrid Deliberative/Reactive Paradigm
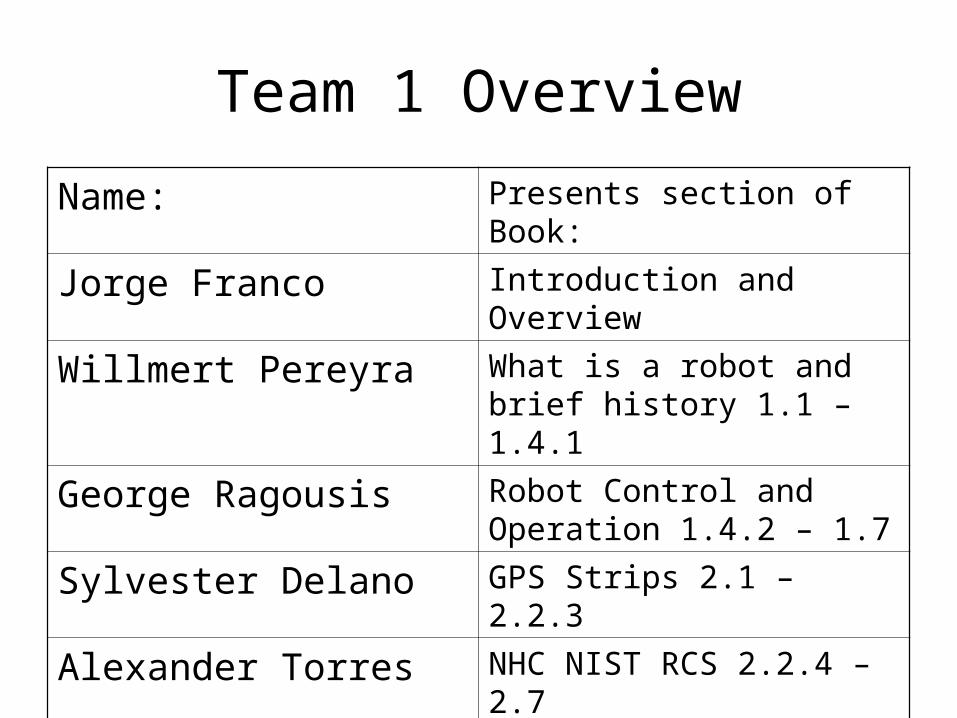
Team 1 Overview
Name: Presents section of Book:
Jorge Franco Introduction and Overview
Willmert Pereyra What is a robot and brief history 1.1 – 1.4.1
George Ragousis Robot Control and Operation 1.4.2 – 1.7
Sylvester Delano GPS Strips 2.1 – 2.2.3
Alexander Torres NHC NIST RCS 2.2.4 – 2.7
Introduction and Overview
Jorge Franco
Overview
• What is AI robotics– 3 major paradigms
• Ways in which intelligence is organized
• Architectures for paradigms– Coherent– Reusable
• Single/Team of robots
Implementations
What are Robots?
• Connotation/denotation – anthropomorphic
• Origins on January 25, 1921, Prague, Karel Capek’s play, R.U.R (Rossum’sRossum’s Universal Robots)
• Term derived from Czech word “robota”, loosely translated as menial worker.
– Attitude towards robot has disastrous consequences:» Moral of rather socialist story: “Work defines a
person”
• Shift from human-like servants made from biological parts to human-like servants made up of mechanical parts due to science fiction– Classics:
• Metropolis (1926), The Day the Earth Stood Still (1951), and Forbidden Planet (1956)
• Shift from human-like mechanical creatures to whatever shape gets the job done is due to reality
• Definition used in book: an intelligent robot is a mechanical creature which can function autonomously.
What are Robots? (cont’d)
What are Robotic Paradigms?• A paradigm is a philosophy or set of assumptions and/or
rules/techniques which characterize an approach to a class of problems
• Why know paradigms?– Key to successfully program a robot for an application– Interesting from historical perspective
• Issues that spawned one the shift from one paradigm to another• 3 kinds
– Hierarchical – Reactive– Hybrid deliberative/reactive
• Described in two ways– Relationship between 3 accepted primitives
• Sense, Act, Plan– Way that sensory data is processed and distributed through the system
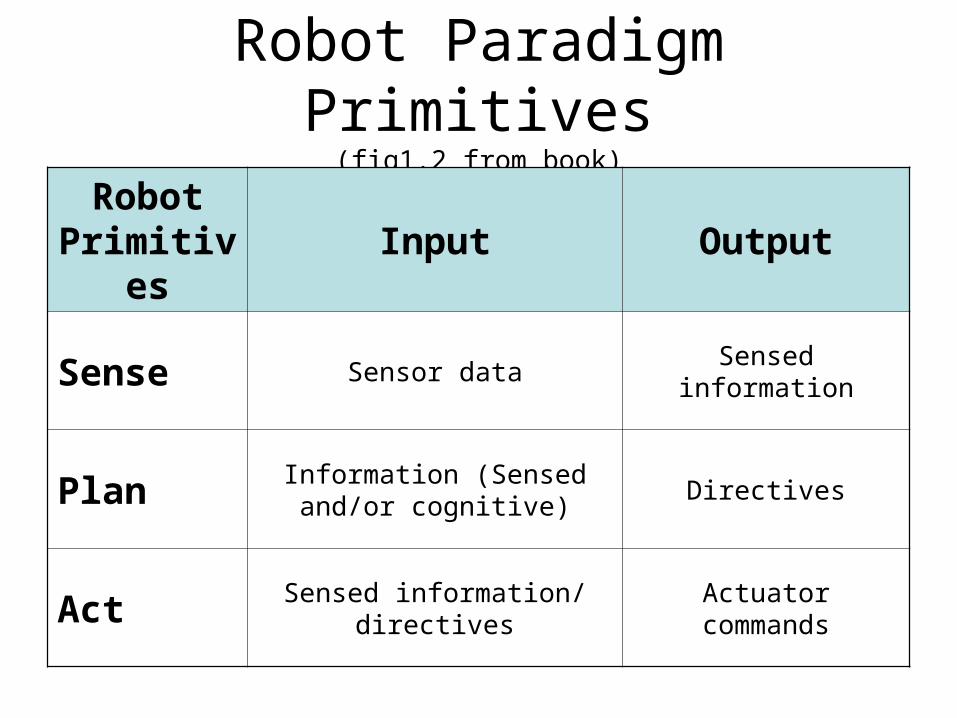
Robot Paradigm Primitives(fig1.2 from book)
Robot Primitives
Input Output
Sense Sensor data Sensed information
Plan Information (Sensed and/or cognitive)
Directives
Act Sensed information/ directives
Actuator commands
Sensing Organization in Robot Paradigms
• Way Sensory data:– Processed– Distributed
• Local processing– Sensor information restricted to specific/dedicated
way for each robot function
• Global world model processing– All SI first processed into a global world model– Subsets of model distributed to other functions as
needed
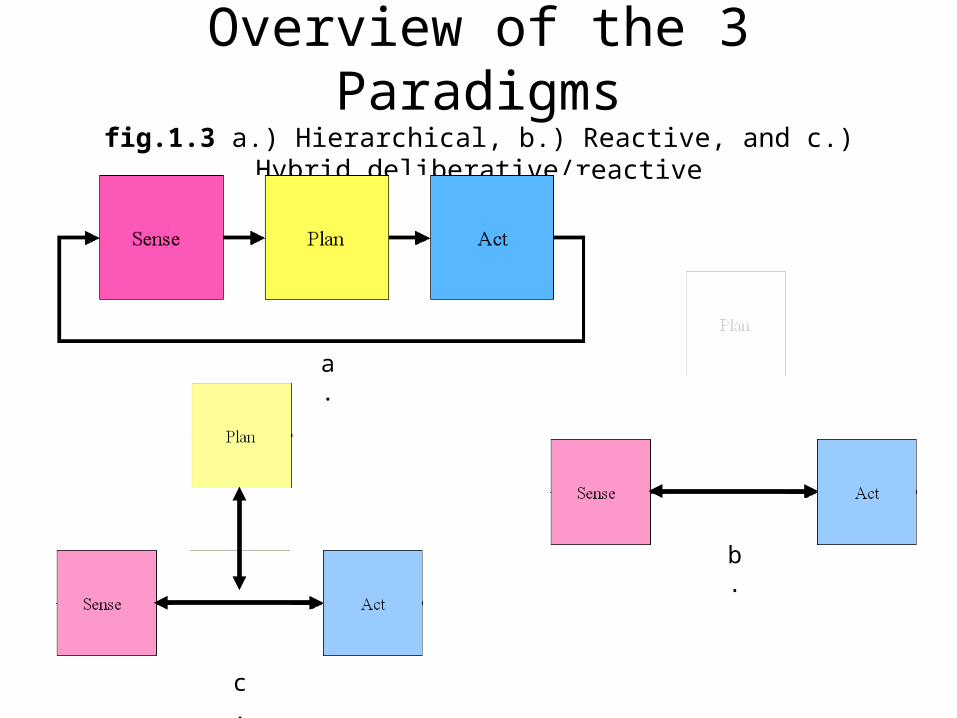
Overview of the 3 Paradigmsfig.1.3 a.) Hierarchical, b.) Reactive, and c.) Hybrid
deliberative/reactive
a.
b.
c.
Hierarchical Paradigm
• 1967 – 1990 • Top down fashion – Heavy on planning• Introspective view
– However as Cognitive Psych. now know:• Not always good assessment of thought process.• Default schemas or behaviors
• Global world model– Hard and brittle
• Frame problem and closed world assumption

Another View of the Hierarchical Paradigm (fig.1.4 from book)
Robot Primitives
Input Output
Sense Sensor data Sensed information
Plan Sensed and/or cognitive information
Directives
Act Sensed information/ directives
Actuator commands

The Reactive Paradigm (fig.1.5 from book)
Robot Primitives
Input Output
Sense Sensor data Sensed information
Plan Sensed and/or cognitive information
Directives
Act Sensed information/ directives
Actuator commands
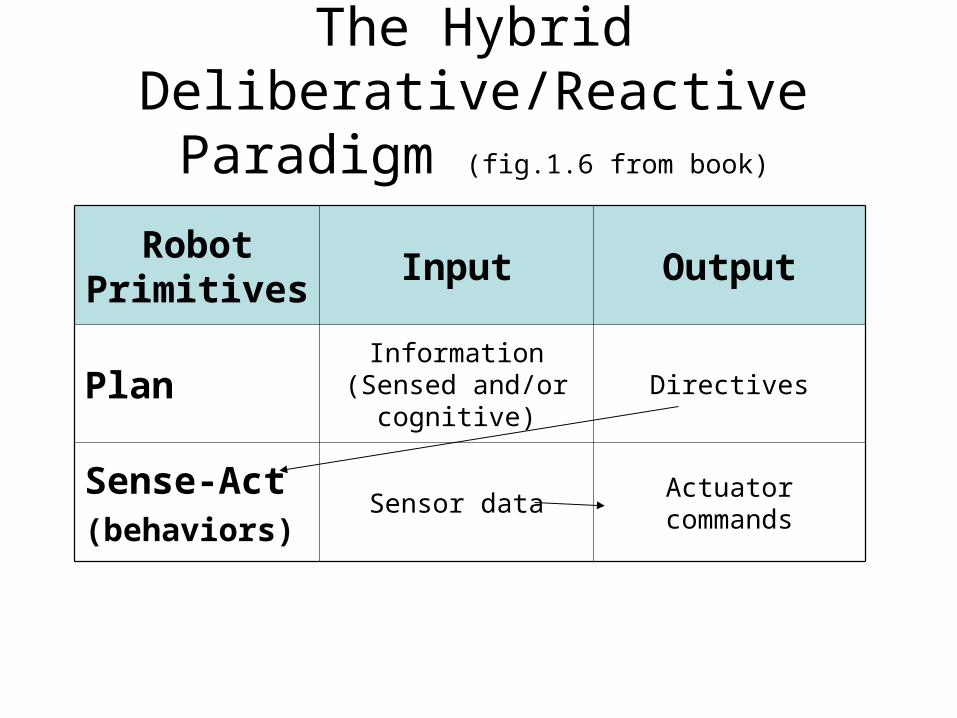
The Hybrid Deliberative/Reactive Paradigm (fig.1.6 from book)
Robot Primitives
Input Output
Plan Information (Sensed and/or cognitive)
Directives
Sense-Act(behaviors)
Sensor data Actuator commands

Representative Architectures
• Templates for an implementation• Examples of what each paradigm really means• According to Mataric: an architecture is a principled way
of organizing a control system, with constraints on the way the control problem can be solved
• Common components in robot architecture and rules of thumb for placing them together– IC car –paradigm – Each car manufacturer has its own architecture– The car manufacturers may have slight modification on their
architecture for sedans, convertibles, SUV’s,etc.
Set Criteria for the Evaluation of an Architecture
• Modularity
• Niche Targetability
• Portability
• Robustness
Layout of the Section
• Divided into 8 chapters– 1. define Robotics– 2. describes Hierarchical Paradigm and 2 architectures– 3. sets the stage for understanding the Reactive Paradigm and
the motivation that spawned it.– 4. Describes the Reactive Paradigm and popular architecture– 5. Provides guidelines and case studies on designing robot
behaviors– 6. Discusses simple sonar and computer vision processing
techniques– 7. Describes the Hybrid Deliberative-Reactive Paradigm– 8. Discusses how the principles of the 3 paradigms have been
transferred to team of robots

Sections 1.1 –1.4.1
Willmert Pereyra
Uses of Robots
• Dirty jobs.
• Dull jobs.
• Dangerous jobs.
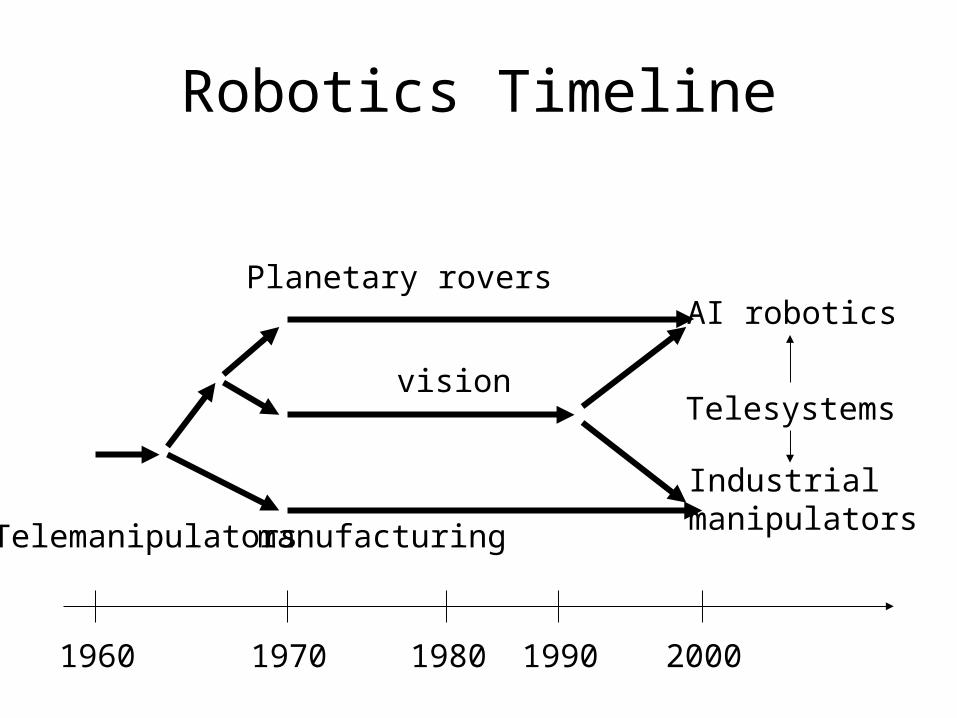
Robotics Timeline
Planetary rovers
vision
manufacturing
AI robotics
Telesystems
Industrial manipulatorsTelemanipulators
1960 1970 1980 1990 2000
Old Movies About Robots
• Modern Times (Charlie Chaplin), 1936.
• Metropolis, 1927.
• Silent Running, 1972.
• The Phantom Menace, 1999.
Modern Times 1937
Metropolis 1927

Silent Running 1972
The Phantom Menace 1999

Approaches to Robotics
• Artificial Intelligence (AI).
• Engineering.
AI vs. Engineering
• AI:– Uses paradigms.– All actions are human-like.
• Engineering:– Does not use paradigms.– Actions performed are
mechanical.
Engineering Control Types
• Ballistic control:– The position, trajectory and velocity profiles
are computed once.
• Feedback control:– The error between the goal and current
position is noted by a sensor(s): a new trajectory and profile is computed and executed. Then modified in the next update.
AI Robotics Terms
• Intelligent Robot:– A mechanical creature which can function
autonomously.
• Paradigm:– A philosophy or set of assumptions and/or
techniques which characterize an approach to a class of problems.

AI Robotics Terms
• Luddites:– People who object to robots, or technology in
general.
• Artificial Intelligence (AI):– (1) Science of making machines act
intelligently. (2) The study of ideas that enable computers to be intelligent. (3) An attempt to make computers do things that at present people are better at.
AI Robotics Terms
• Teach pendant:– A device that enables the programmer to
guide the robot through the desired set of motions.
• Automatic Guided Vehicle (AGV):– A vehicle that knows where it is, can plan a
path from its current location to its goal destination and can avoid colliding with obstacles.
AI Robotics Terms
• Telepresence: – The reduction of cognitive fatigue and
simulator sickness by making the human-robot interface more natural: virtual reality.
• Telemanipulator:– Sophisticated mechanical linkage which
translates motions on one end of the mechanism to motions at the other end.
AI Robotics Terms
• Industrial manipulator:– A reprogrammable multifunctional mechanism
that is designed to move materials, parts, tools, or specialized devices.
• Black factory:– A factory that has no lights turned on because
there are no workers.
Architecture Evaluation Criteria
• Support for modularity: – Good software engineering principles?
• Niche targetability: – Works well for the intended application?
• Ease of portability: – Works for other applications or other robots?
• Robustness: – Is the system vulnerable? Where?

Model S Telemanipulator
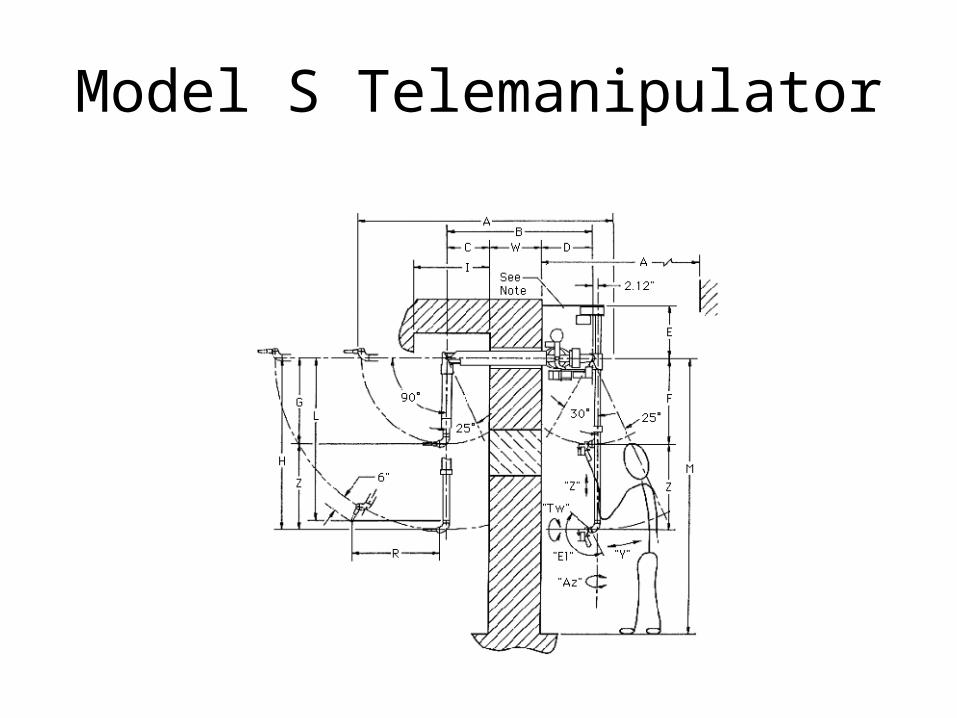
Model S Telemanipulator
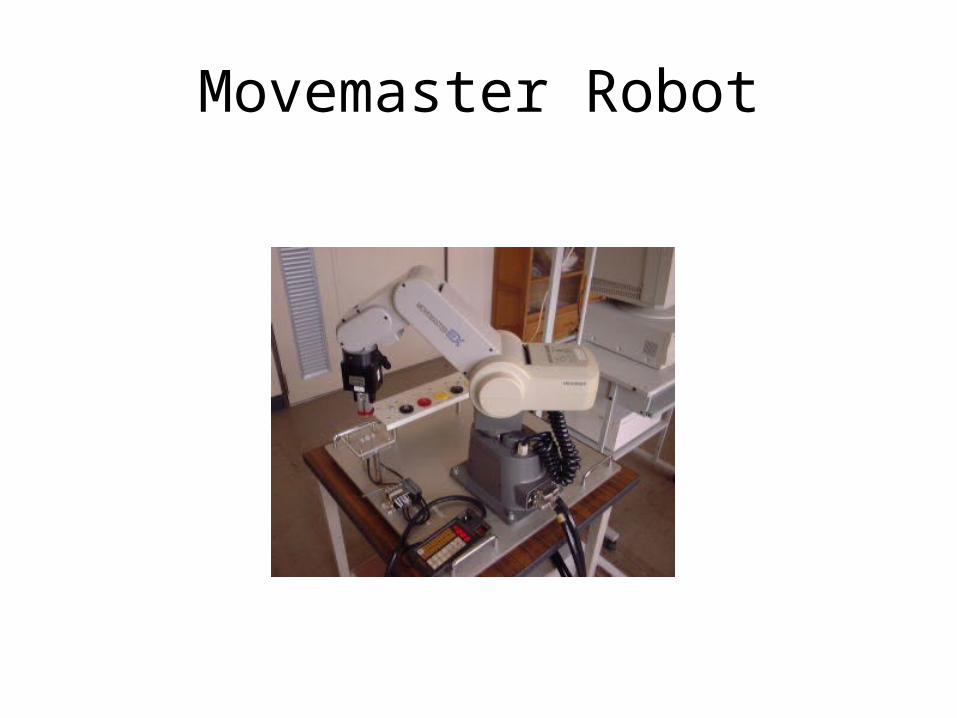
Movemaster Robot
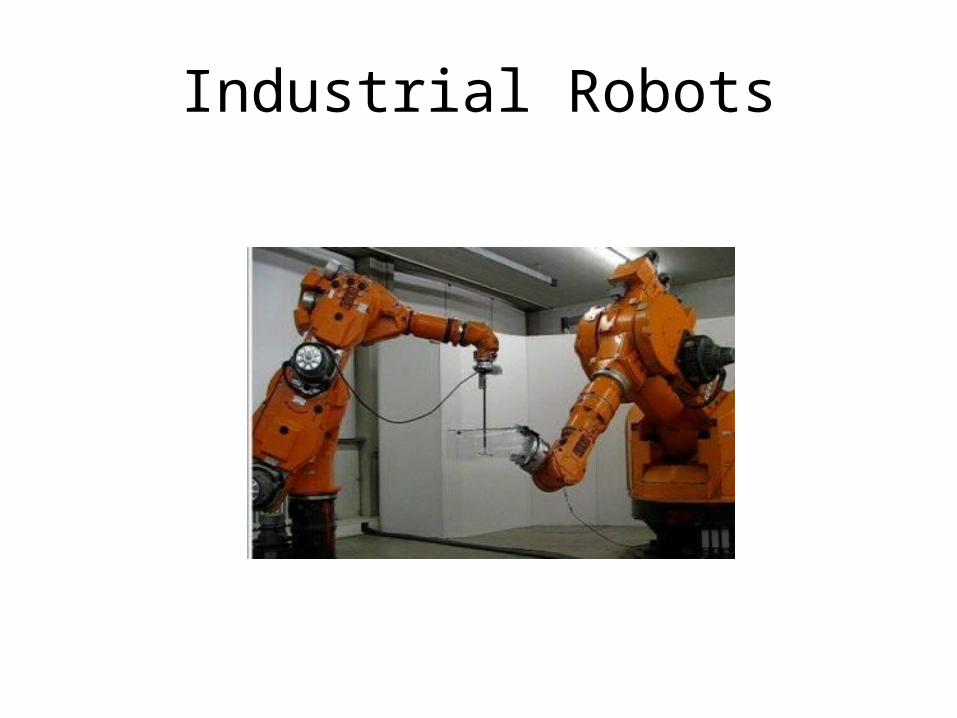
Industrial Robots
Robotic Paradigms
1. Hierarchical.
2. Reactive.
3. Deliberative/Reactive.

Defining Paradigm Assumptions
• By the relationship between the primitives.
• By the way sensor data is processed and distributed.
Global World Model Problems
• Constructing generic global world models is very hard due to the frame problem and the closed world assumption.
Global World Model Problems
• Frame problem:– Deals with the representation of real-world
situations in a way that is computationally tractable.
• Closed/Open world assumption:– States that the world model contains
everything the robot needs to know (Closed) and if it is violated the robot may not be able to function correctly.

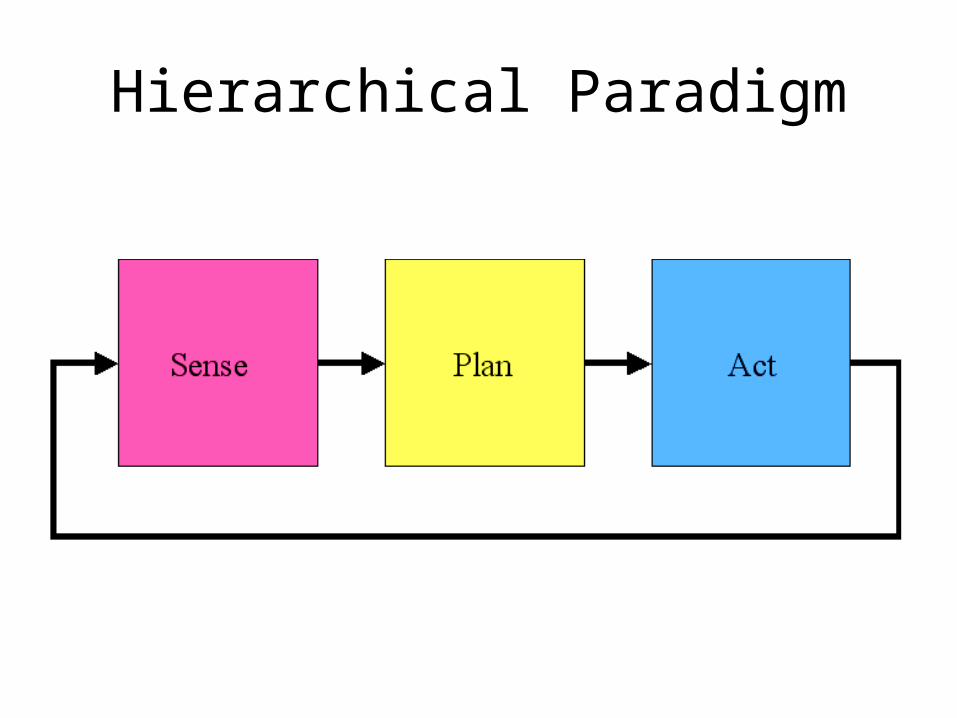
Hierarchical Paradigm
• Oldest paradigm.
• Prevalent from 1967-1990.
• Robot operates top-down.
• Emphasizes planning.
• Assumes thought is introspective.
• A global model captures all sensing data.
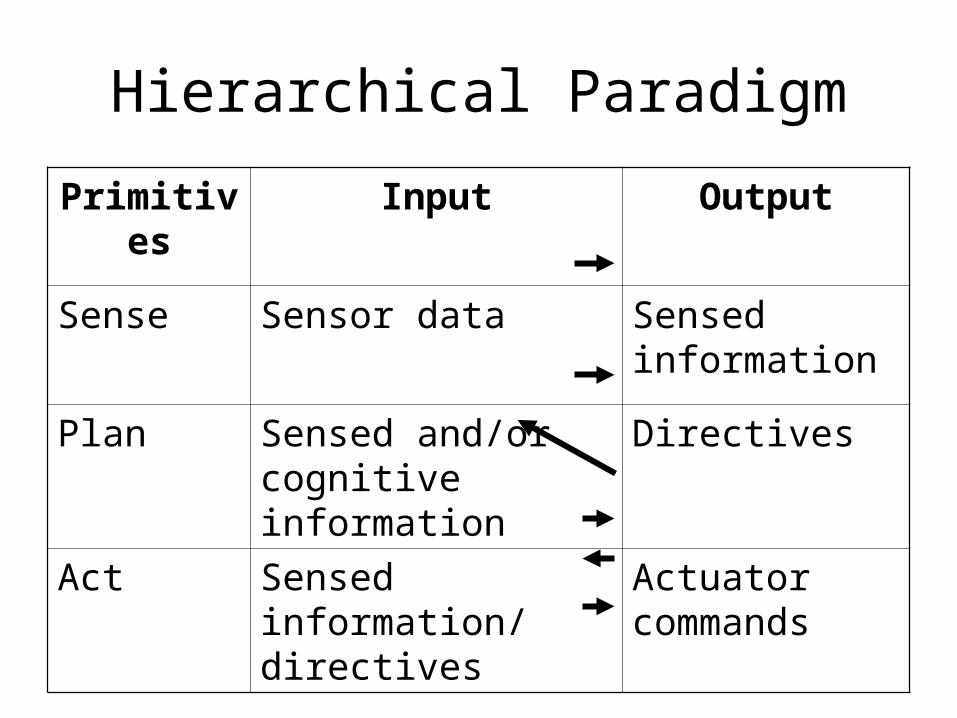
Hierarchical Paradigm
Primitives Input Output
Sense Sensor data Sensed information
Plan Sensed and/or cognitive information
Directives
Act Sensed information/ directives
Actuator commands
Hierarchical Paradigm
Robot Control and Operation Section 1.4.2 – 1.7
George Ragousis

4 Ways to control and operate a robot
• 1. Remote control (RC)• 2. Tele-operation• 3. Semi-autonomous• 4. Autonomous (AI)

1. Remote control
– you control the robot– you can view the robot
and it’s relationship to the environment
– operator isn’t removed from scene, not very safe
– ex. radio controlled cars, bomb robots
Boxing RC robots
2. Teleoperation
– you control the robot– you can only view the
environment through the robot’s eyes
– don’t have to figure out AI
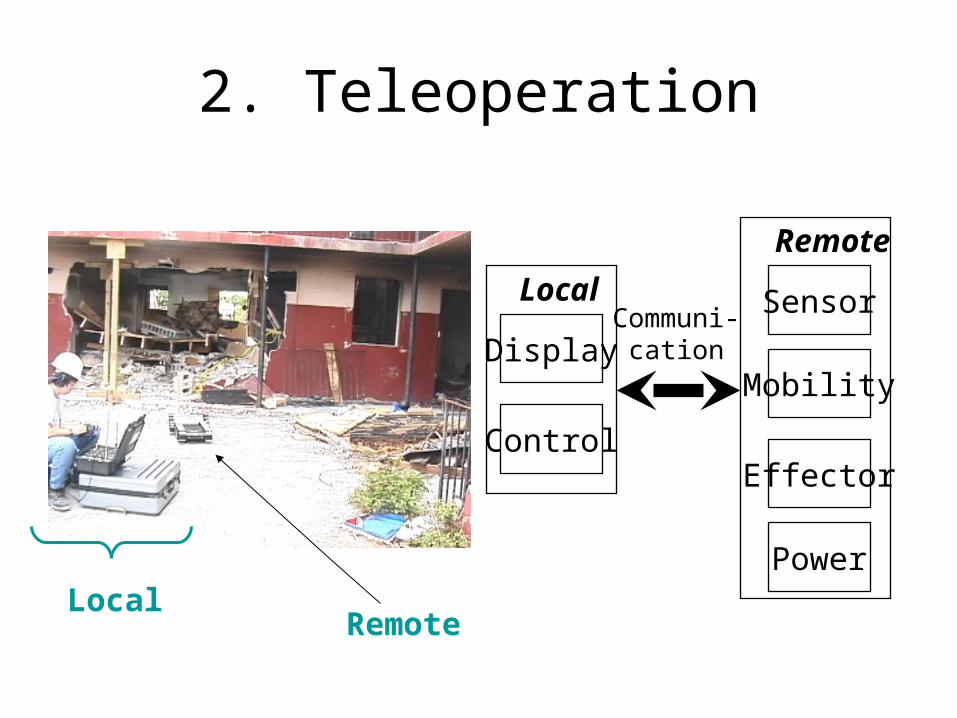
2. Teleoperation
Display
Control
Sensor
Mobility
Effector
Power
Communi-cation
Local
Remote
LocalRemote
2. Teleoperation
is suitable for applications where…• the tasks are unstructured and not repetitive• the task workspace cannot be engineered to permit the
use of industrial manipulators• key portions of the task require dexterous manipulation,
especially hand-eye coordination, but not continuously • key portions of the task require object recognition or
situational awareness • the needs of the display technology do not exceed the
limitations of the communication link (bandwidth, time delays)
• the availability of trained personnel is not an issue
2. Teleoperation
Disadvantages…
• Cognitive fatigue, 100% guidance
• Simulator sickness
• communications bandwidth (telepresence)
• Time delays (Darkstar 1 – Darkspot 0)
3. Semi-autonomous
Portion of directions and commands is given to robot
2 flavors
Shared control Control trading step by step instructions commanding robot to do
something
to accomplish task but no within its abilities and allowing the
full guidance is required robot to get it done without interaction
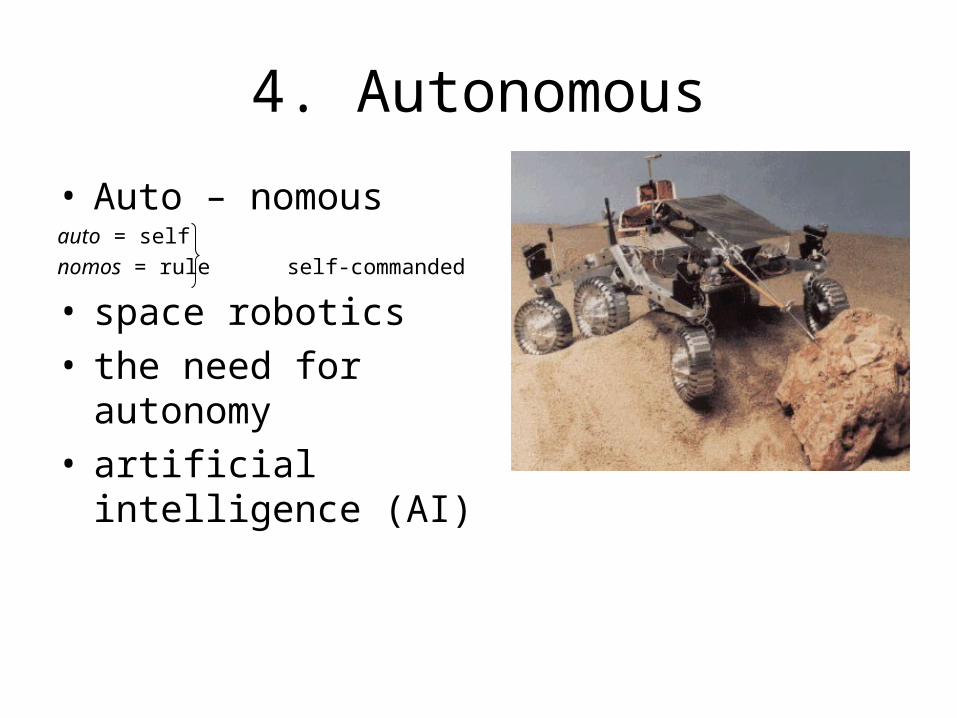
4. Autonomous
• Auto – nomousauto = self
nomos = rule self-commanded
• space robotics• the need for autonomy• artificial intelligence (AI)
Teleoperation Vs Autonomous remote operation Vs self operation
• much more difficult to achieve• higher risk of misjudgment and
false actions from robot• no time delays in operation• independent
goal of autonomy and AI:
To mimic the capabilities of animals or humans sufficiently in order to survive for long periods with only simple instructions from earth.
• easy to achieve• human in control – small
chances of decision and judgment errors
• dexterous manipulations• critical decisions by human
(Mars Pathfinder accident)• Introduces time delays in
proportion with the distance between local & remote.
Artificial Intelligence
Seven areas
1. Knowledge representation – how am I me?
2. Understanding natural language (willing spirit – weak flesh)
3. Learning
4. Planning & problem solving
5. Inference – just take a decision
6. Search
7. Vision

Section 2.1 – 2.2.3
Sylvester Delano
Introduction to AI Robotics (Team ONE)
Chapter2 Section 2.1 -2.2.3 58
The Hierarchical Paradigm• Describe the Hierarchical Paradigm in terms of the
3 robot primitives and its organization of sensing
• Name and evaluate one representative Hierarchical architecture in terms of: support for modularity, niche targetability, ease of portability to other domains, robustness
• Understand precondition, closed world assumption, open world, frame problem
• List two advantages and disadvantages of the Hierarchical Paradigm
Organization-SPA-globalStrips-ShakeyRep. Arch.-evaluation-NHC-RCASummary
Introduction to AI Robotics (Team ONE)
Chapter2 Section 2.1 -2.2.3 59
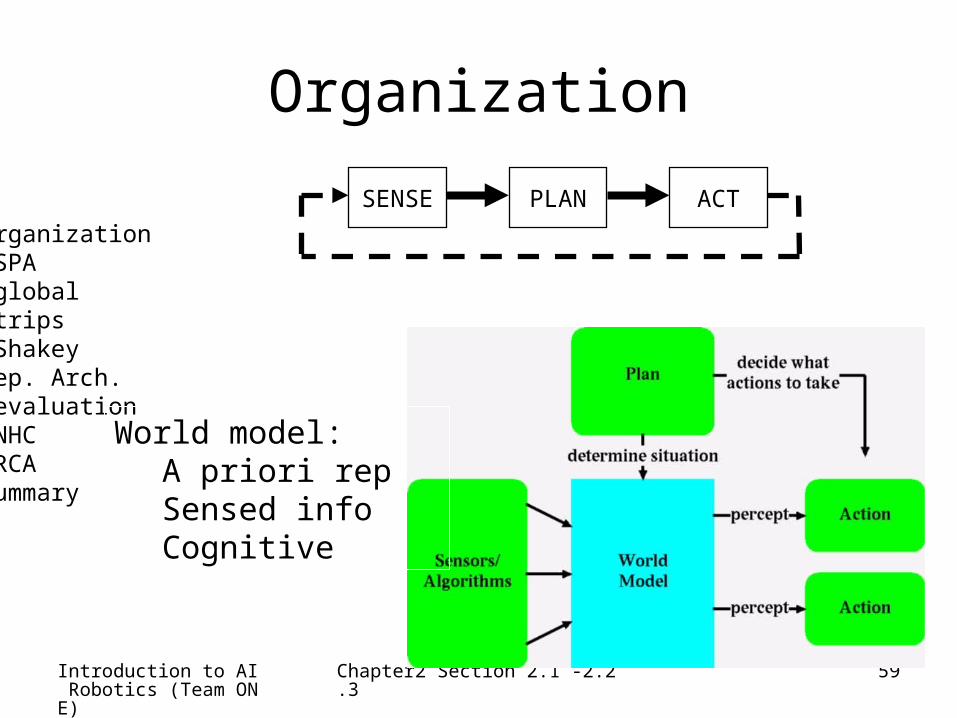
Organization
PLANSENSE ACT
Organization-SPA-globalStrips-ShakeyRep. Arch.-evaluation-NHC-RCASummary
World model:1. A priori rep2. Sensed info3. Cognitive
Introduction to AI Robotics (Team ONE)
Chapter2 Section 2.1 -2.2.3 60
Stanford Research Institute● SRI is an independent, non-profit research institute
conducting client-sponsored research and development for government agencies, commercial businesses, foundations, and other organizations.
● SRI is well known for its innovations in communications and networks, computing, economic development and science and technology policy, education, energy and the environment, engineering systems, pharmaceuticals and health sciences, homeland security and national defence, and materials and structures.
Introduction to AI Robotics (Team ONE)
Chapter2 Section 2.1 -2.2.3 61
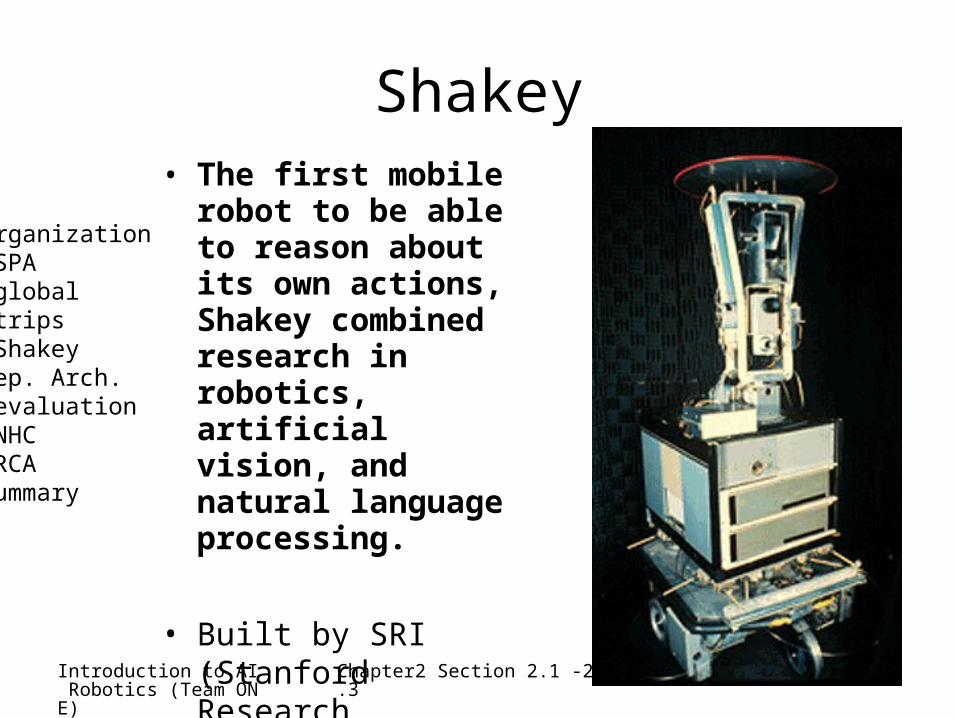
Shakey• The first mobile
robot to be able to reason about its own actions, Shakey combined research in robotics, artificial vision, and natural language processing.
• Built by SRI (Stanford Research Institute) for DARPA 1967-9
Organization-SPA-globalStrips-ShakeyRep. Arch.-evaluation-NHC-RCASummary
Introduction to AI Robotics (Team ONE)
Chapter2 Section 2.1 -2.2.3 62
Shakey(cont'd)
• Programming was primarily in LISP.
• Used Strips as main algorithm for controlling what to do

Introduction to AI Robotics (Team ONE)
Chapter2 Section 2.1 -2.2.3 63
What is LISP(LIST Processing) ?
• A high-level programming language used for developing AI applications. Developed in 1960 by John McCarthy, its syntax and structure is very different from traditional programming languages. For example, there is no syntactic difference between data and instructions.
• LISP is available in both interpreter and compiler versions and can be modified and expanded by the programmer. Many varieties have been developed, including versions that perform calculations efficiently.
Introduction to AI Robotics (Team ONE)
Chapter2 Section 2.1 -2.2.3 64
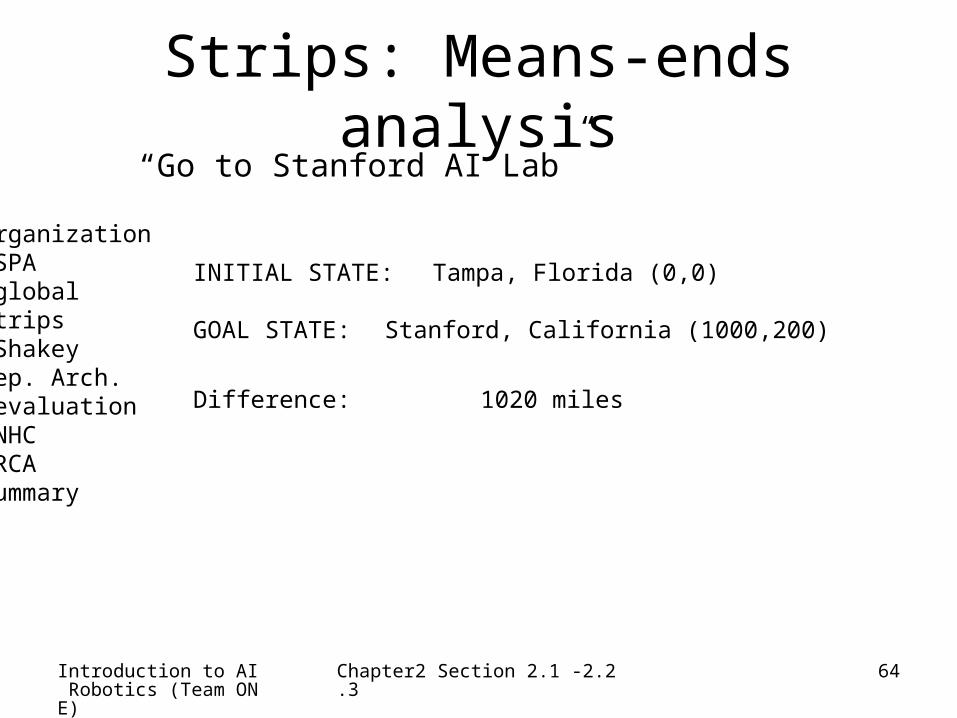
Strips: Means-ends analysis
Organization-SPA-globalStrips-ShakeyRep. Arch.-evaluation-NHC-RCASummary
INITIAL STATE: Tampa, Florida (0,0)
GOAL STATE: Stanford, California (1000,200)
Difference: 1020 miles
“Go to Stanford AI Lab”
Introduction to AI Robotics (Team ONE)
Chapter2 Section 2.1 -2.2.3 65
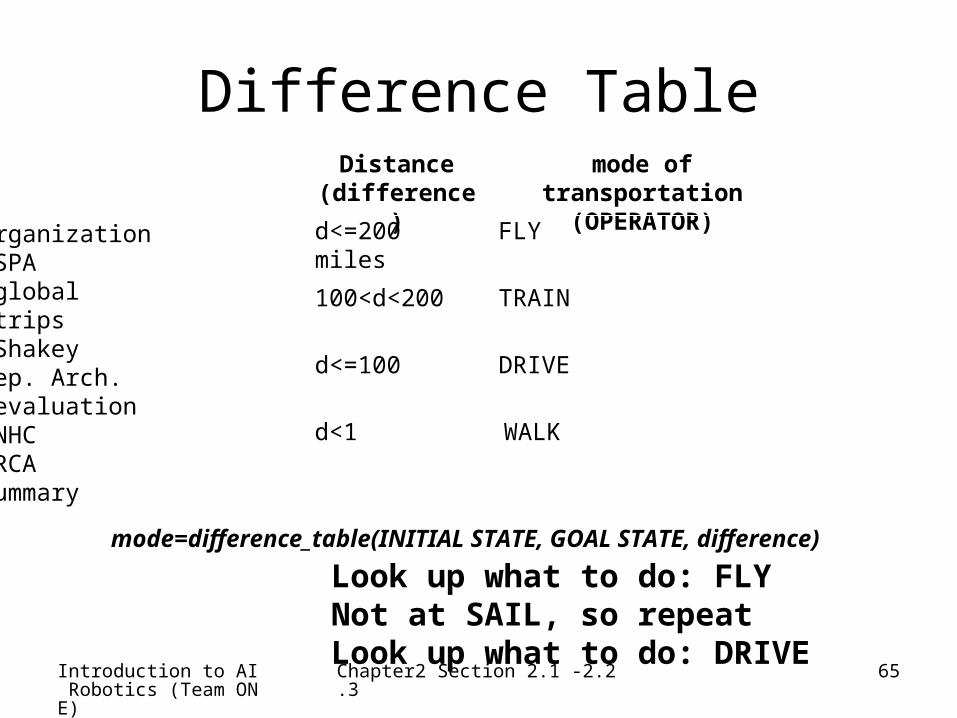
Difference Table
d<=200 miles FLY
100<d<200 TRAIN
d<=100 DRIVE
Distance(difference)
mode of transportation(OPERATOR)
d<1 WALK
Organization-SPA-globalStrips-ShakeyRep. Arch.-evaluation-NHC-RCASummary
mode=difference_table(INITIAL STATE, GOAL STATE, difference)
1. Look up what to do: FLY2. Not at SAIL, so repeat3. Look up what to do: DRIVE
Introduction to AI Robotics (Team ONE)
Chapter2 Section 2.1 -2.2.3 66
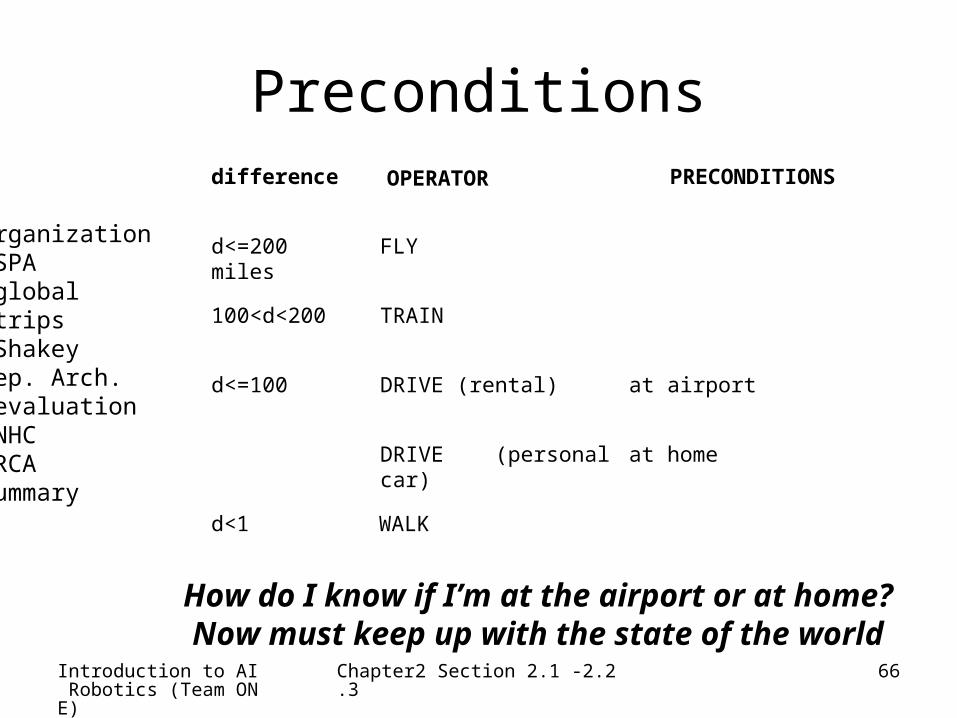
Preconditions
d<=200 miles FLY
100<d<200 TRAIN
d<=100 DRIVE (rental)
DRIVE (personal car)
difference OPERATOR
d<1 WALK
Organization-SPA-globalStrips-ShakeyRep. Arch.-evaluation-NHC-RCASummary
How do I know if I’m at the airport or at home?Now must keep up with the state of the world
at airport
at home
PRECONDITIONS
Introduction to AI Robotics (Team ONE)
Chapter2 Section 2.1 -2.2.3 67
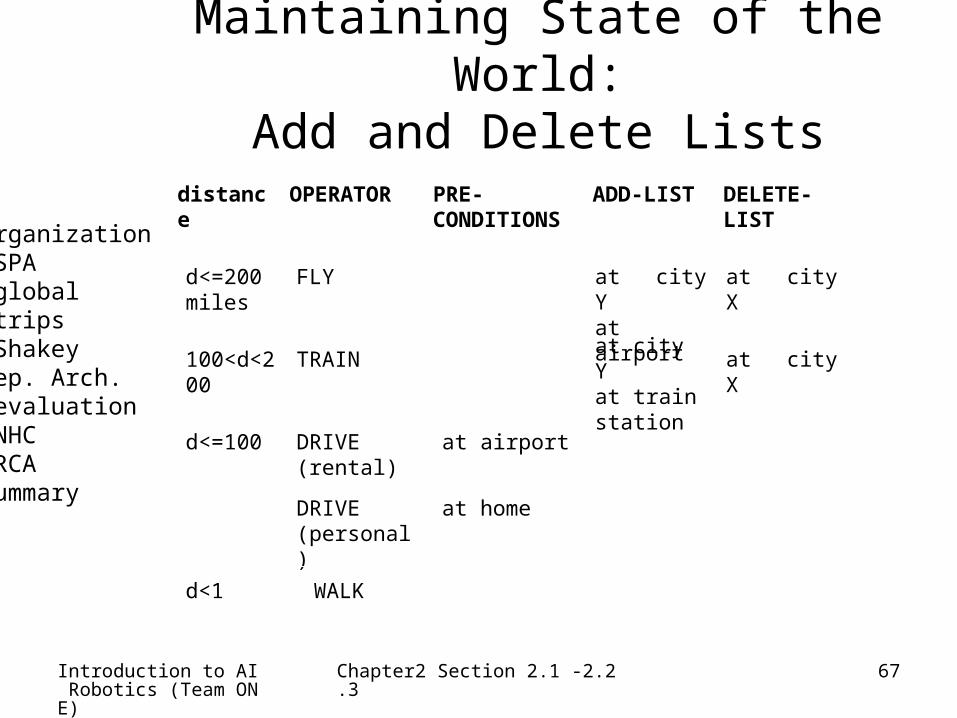
Maintaining State of the World:Add and Delete Lists
d<=200 miles
FLY
100<d<200
TRAIN
d<=100 DRIVE (rental)
at airport
DRIVE (personal)
at home
distance OPERATOR PRE-CONDITIONS
d<1 WALK
Organization-SPA-globalStrips-ShakeyRep. Arch.-evaluation-NHC-RCASummary
at city Yat airport
at city Yat train station
ADD-LIST
at city X
at city X
DELETE-LIST

Introduction to AI Robotics (Team ONE)
Chapter2 Section 2.1 -2.2.3 68
Class Exercise
Organization-SPA-globalStrips-ShakeyRep. Arch.-evaluation-NHC-RCASummary
d<=200 miles
FLY
100<d<200
TRAIN
d<=100 DRIVE (rental)
at airport
DRIVE (personal)
at home
distance OPERATOR PRE-CONDITIONS
d<1 WALK
at city Yat airport
at city Yat train station
ADD-LIST
at city X
at city X
DELETE-LIST

Introduction to AI Robotics (Team ONE)
Chapter2 Section 2.1 -2.2.3 69
Strips Summary
• Designer must set up– World model representation– Difference table with operators, preconditions, add & delete lists– Difference evaluator
• Strips assumes closed world– Closed world: world model contains everything needed for robot
(implication is that it doesn’t change)– Open world: world is dynamic and world model may not be
complete• Strips suffers from frame problem
– Frame problem: representation grows too large to reasonably operate over
Organization-SPA-globalStrips-ShakeyRep. Arch.-evaluation-NHC-RCASummary

Section 2.2.4 –2.7
Alexander Torres
Team One – HierarchySTRIPS Summary
• Designer must set up– World model representation– Difference table with operators, preconditions, add &
delete lists– Difference evaluator
• Strips assumes closed world– Closed world: world model contains everything needed
for robot (implication is that it doesn’t change)– Open world: world is dynamic and world model may not
be complete
• Strips suffers from frame problem– Frame problem: representation grows too large to
reasonably operate over

Team One – HierarchyClosed World Assumption and the Frame Problem
It is impractical for a programmer to come up with all possible reactions, conditions to all probable cases in the real world
The need to formally represent the world and then maintain every change about it is nonnutritive.
The axioms (facts) that would frame the world would quickly become too numerous for any realistic domain
A proposed solution was ABStrips which divided the problem into multiple layers of abstraction (this would mean solving problems with increasing levels of details)
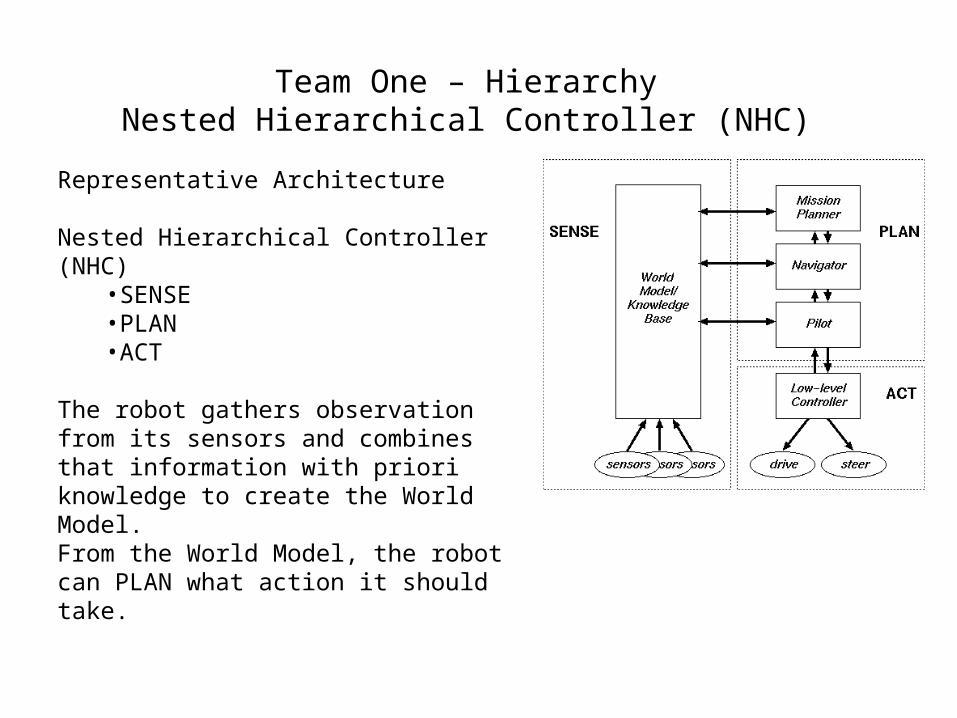
Team One – HierarchyNested Hierarchical Controller (NHC)
Representative Architecture
Nested Hierarchical Controller (NHC) •SENSE•PLAN•ACT
The robot gathers observation from its sensors and combines that information with priori knowledge to create the World Model.From the World Model, the robot can PLAN what action it should take.

Team One – HierarchyNested Hierarchical Controller (NHC)
Representative Architecture
Planning for navigation consists of three step executed by
Mission Planner, Navigator, and Pilot
Each of these can access the World Model
The last step is the Pilot module generating specific actions for the robot to do.

Team One – HierarchyNested Hierarchical Controller (NHC)
The Benefits of the NHC are:
•Unlike STRIPS it interleaves planning and acting
•It can adapt to changes in its environment if necessary
The Disadvantages of NHC are:
•Planning Function is only appropriate for navigation tasks
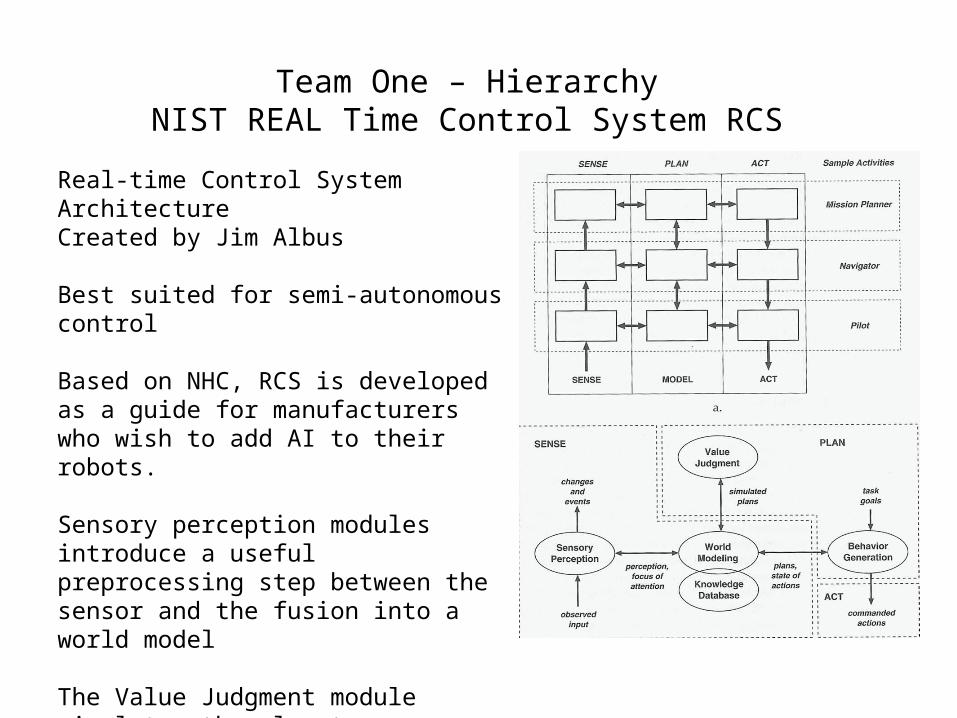
Team One – HierarchyNIST REAL Time Control System RCS
Real-time Control System Architecture Created by Jim Albus
Best suited for semi-autonomous control
Based on NHC, RCS is developed as a guide for manufacturers who wish to add AI to their robots.
Sensory perception modules introduce a useful preprocessing step between the sensor and the fusion into a world model
The Value Judgment module simulates the plan to ensure they work.
Behavior Generation Module operates similar to the pilot with less focus on navigations.
Advantage
• Provides an ordering of the relationship between sensing, planning, and acting.
Disadvantages
• Planning, every update cycle the robot would have to update a global world model and do some type of planning.
• Sensing and action are disconnected. This doesn’t allow for reflexive reactions found in real life.
• Dependence on global world model is related to the frame problem. A simple task can becomes incredibly complicated to describe.
• Uncertainty in semantics, sensor noise and actuator errors.
Team One – HierarchyAdvantages and Disadvantages
• Predicate logic and recursion used by STRIPS favors languages such as LISP and PROLOG
• Although LISP and PROLOG do not have good real-time control properties, the alternative at the time was FORTRAN IV which did not support recursion
• Hierarchical Paradigm forces programming for specific tasks instead of object oriented tasks.
• NHC and RCS decomposition of a task is not modular in design
Team One – HierarchyProgramming Considerations
Team One – HierarchySummary
•Except for NIST Real-time Control Architecture, Hierarchical Paradigm has fallen out of favor for more biologically based systems of control.
•It has contributed concepts and terminology such as preconditions, closed/open world assumptions, and the frame problem
•It has the inherent property to allow an evolution of intelligence from semi-autonomous control to full autonomy.