amicus 1000plus - butterfly-tt.org · geschwindigkeit und spin ... (min. 50-60 st.) und ......
TRANSCRIPT
- 1 -
Tischtennisroboter
AMICUS 1000Plus
entwickelt von Csaba Lukács Patent-Nr.: HU 200 947 B
Handbuch
Œ geprüft!

- 2 - 2
Wichtig: Bedienungsanleitung bitte vor Inbetriebnahme sorgfältig durchlesen! Im Kapitel Steuereinheit (Kurzbeschreibung) werden die grundsätzlichen Vorbereitungen zum Bedienen der TT-Ballmaschine Amicus 1000plus erklärt. Die ausführliche Anleitung folgt im Kapitel Bedienung. Die nötigen Vorbereitungen und Bedienungsschritte werden in diesen Teilen erklärt. Es empfiehlt sich, den bereits montierten Roboter (erst einmal ohne Bälle) beim Durchlesen der Bedienungsanleitung hinzuzunehmen. Die einzelnen Bedienelemente können so ausprobiert werden, um sich mit ihnen nach und nach vertraut zu machen, bis Sie alle Funktio-nen dieser Ballmaschine ausnutzen können. 1. Zusammenbau S. 4-5
2. Steuereinheit (Kurzbeschreibung) S. 6
3. Bedienung Inbetriebnahme Einstellungen Geschwindigkeit und Spin Flugkurve und Auswurflänge Ballpositionierung Seitenschnitt, Ballfrequenz, Höhenverstellung, Fernbedienung, Ausschalten
S. 7-10 S. 7 S. 8 S. 9 S. 10
4. Wartung und Instandsetzung S. 11
5. Fehlerbehebung S. 12
6. Ersatzteilliste S. 13
7. Technische Daten S. 13
Tamasu Butterfly Europa GmbH Am Schürmannshütt 30h
D - 47441 Moers Telefon 02841-9053223

- 3 - 3
Tischtennis Ballmaschine Amicus 1000plus... vom Anfänger bis zum Profi, vom Abwehrspieler bis zum Angreifer,
... für jeden Spielertyp und jede Spielstärke optimal geeignet. • Ballauswurfrollen aus Hartschaum mit Spezialbe-
schichtung für lange Laufzeit • Solide, funktionelle Verarbeitung • Gut durchdachtes und einfach zu bedienendes Steu-
erpult • Platzierung der Bälle mit der eingestellten Rotation
und Geschwindigkeit auf sechs verschiedene Stellen • Zufallsfunktion • Computergesteuerte Anpassung der Ballplazierung
in der Länge (gleich langer Auswurf in die Ecken sowie in die Tischmitte)
• Torsionsfeder ermöglicht Ballnachlauf ohne stören-de Unterbrechungen
• Fernbedienung • Großes Ballauffangnetz mit Seitenfang für optimale
Ballrückführung • Roboter-Hotline: 02841-9053223 • Höhenverstellbares Ballführungsrohr Sie sind nun der Besitzer einer TT-Ballmaschine von Butterfly, entwickelt von Csabo Lukács. Es ist unser größtes Bemühen, Produkte höchster Qualität herzustellen und sie fehlerfrei und vollständig zu liefern. Sollte es jedoch vorkommen, daß Teile fehlen oder fehlerhaft sind, wen-den Sie sich bitte an Ihren Fachhändler oder direkt an Butterfly (Anschrift siehe Seite 12). Der Hersteller gewährleistet 2 Jahre Vollgarantie und 5 Jahre Service für Reparaturen und Ersatzteile ab Kaufdatum. Bitte bewahren Sie Ihren Kaufnachweis auf.
Bei Beachtung dieser Hinweise wird Ihnen der "Amicus 1000plus" immer ein toller Trainings-partner und Freund (Amicus, lateinisch „Freund“) sein.
Achtung: • Lesen Sie diese Anleitung erst einmal sorgfältig durch, bevor Sie die Maschine in Betrieb
nehmen! • Die Ballmaschine kann nur an ein geerdetes Stromnetz von 230 V angeschlossen werden! • Die Auswurfrollen drehen mit hoher Geschwindigkeit. Vermeiden Sie deshalb während des
Betriebes, diese Rollen anzufassen! • Die Tischtennis Ballmaschine Amicus 1000plus sollte nur in geschlossenen und trockenen
Räumen benutzt werden!
- 4 - 4
BEDIENUNGSANLEITUNG
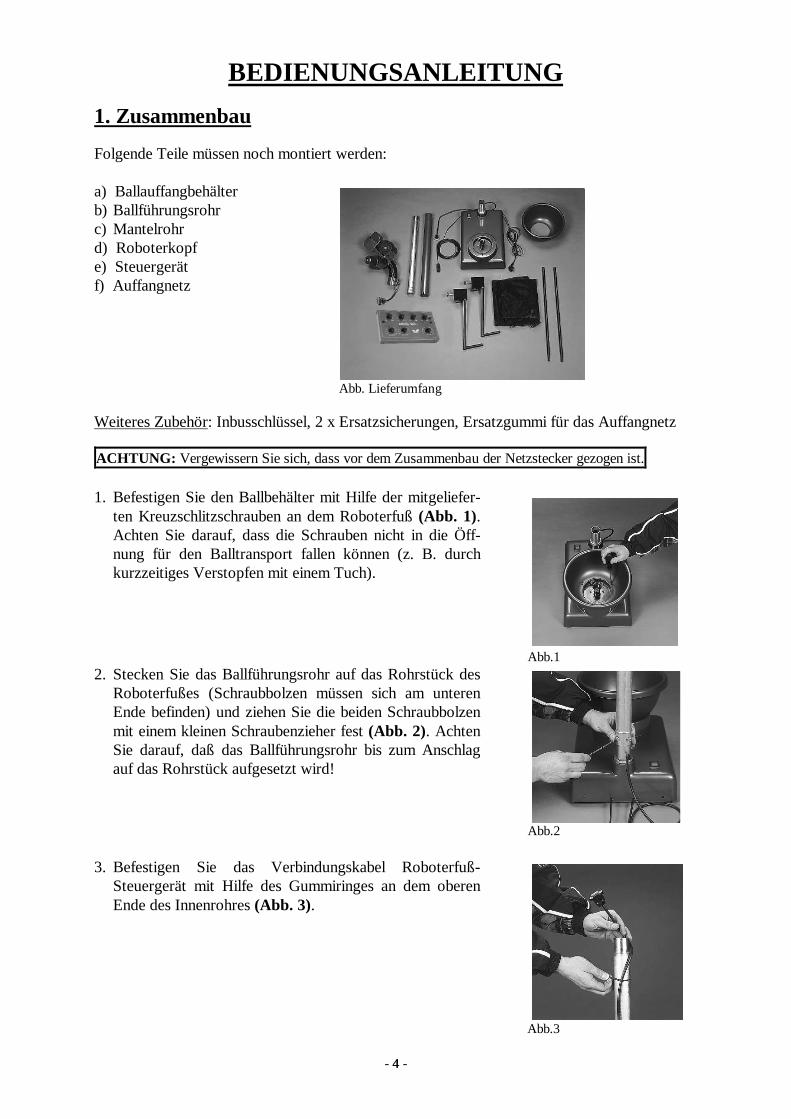
1. Zusammenbau Folgende Teile müssen noch montiert werden: a) Ballauffangbehälter b) Ballführungsrohr c) Mantelrohr d) Roboterkopf e) Steuergerät f) Auffangnetz
Abb. Lieferumfang Weiteres Zubehör: Inbusschlüssel, 2 x Ersatzsicherungen, Ersatzgummi für das Auffangnetz
ACHTUNG: Vergewissern Sie sich, dass vor dem Zusammenbau der Netzstecker gezogen ist. 1. Befestigen Sie den Ballbehälter mit Hilfe der mitgeliefer-
ten Kreuzschlitzschrauben an dem Roboterfuß (Abb. 1). Achten Sie darauf, dass die Schrauben nicht in die Öff-nung für den Balltransport fallen können (z. B. durch kurzzeitiges Verstopfen mit einem Tuch).
Abb.12. Stecken Sie das Ballführungsrohr auf das Rohrstück des
Roboterfußes (Schraubbolzen müssen sich am unteren Ende befinden) und ziehen Sie die beiden Schraubbolzen mit einem kleinen Schraubenzieher fest (Abb. 2). Achten Sie darauf, daß das Ballführungsrohr bis zum Anschlag auf das Rohrstück aufgesetzt wird!
Abb.2 3. Befestigen Sie das Verbindungskabel Roboterfuß-
Steuergerät mit Hilfe des Gummiringes an dem oberen Ende des Innenrohres (Abb. 3).
Abb.3

- 5 -
4. Schieben Sie das Mantelrohr bis zum Anschlag über das innere Ballführungsrohr (mit Kabel). Beachten Sie, daß die Aussparung am Mantelrohr nach oben zeigt und das an dem Innenrohr befestigte Kabel genau an dieser Nut am Mantelrohr austritt (Abb. 4).
Abb.4
5. Stecken Sie den Roboterkopf so auf das Innenrohr, daß die beiden Kabel nicht eingeklemmt werden können (bei-de Kabel treten nach unten heraus) (Abb. 5). Justieren Sie durch einfaches Verdrehen den Kopf so, daß er über dem Ballbehälter angebracht ist. Achten Sie darauf, daß kein Spalt zwischen Roboterkopf und Mantelrohr ist. Ziehen Sie die untere der beiden Schrauben der Schelle mit dem Inbusschlüssel fest.
Abb.5
6. Befestigen Sie das Steuergerät auf die dafür vorgesehene Konsole und stecken die Kabel-stecker in die Anschlüsse am Bedienteil.
7. Befestigen Sie die Netzhalter an den Ecken des TT-
Tisches (Abb. 6) und schieben Sie die Verlängerungsroh-re auf die Rohrstücke (Abb. 7). Stecken Sie die angenäh-ten 6 Pfropfen in die jeweiligen Enden der Verlänge-rungsrohre (Abb. 8) bzw. in die Rohrstücke an den Eck-profilen. Beachten Sie, daß sich der Netzausschnitt für den Roboterkopf ca. 20 cm über dem TT-Tisch befindet und das aufgedruckte Butterfly-Logo vom Spieler aus lesbar ist. Anschließend führen Sie die Enden des Auf-fangnetzes über den TT-Netzhalter und befestigen die Gummiringe an den Befestigungsschrauben des Tischten-nisnetzes (Abb. 9). Wenn Sie das Netz nicht auf die be-schriebene Art befestigen, können die Bälle besonders in den Seitenteilen nicht richtig abrollen.
Abb.7 Abb.8 Abb.9
Abb.6

- 6 - 6
2. Steuereinheit (Kurzbeschreibung)
6 gelbe Kontrollleuchten 6 Drehregler grüne Druckknopf A (nur 4 auf diesem alten Bild!) links/rechts Kontrollleuchte (Programm/Zufall)
Druckknopf B Drehregler 1 Drehregler 2 Drehregler 3 Druckknopf C Ball 1 bis 6 Spin Speed Ballfrequenz Ball 6 bis 1
Mit Hilfe der Drehregler und Drucktasten ist es möglich, den eingestellten Ball auf sechs ver-schiedene Treffpunkte zu programmieren, z. B. 1. Ball ⇒ links, 2. Ball ⇒ rechts, 3. Ball ⇒ Mitte, 4. Ball ⇒ rechts Druckknopf A: Umstellung von Normalfunktion auf Zufallsfunktion Druckknopf B: Wahlweise Aktivierung von bis zu max. sechs Bällen Druckknopf C: Zurücksetzen von max. vier auf min. einen Ball Drehregler 1: Spin: Steuerung Unterschnitt (negative Zahlen)/Oberschnitt (positive Zahlen) Drehregler 2: Steuerung Geschwindigkeit Drehregler 3: Einstellung der Ballfrequenz (Ballauswurf pro Minute) Die sechs gelben Kontrollleuchten zeigen an, wie viele Bälle gerade aktiviert sind. Das blin-kende Lämpchen bedeutet, dass dieser Ball als nächstes ausgeworfen wird. Das grüne Lämpchen leuchtet nur, wenn die Zufallsfunktion in Betrieb ist (mindestens zwei verschiedene Bälle müssen aktiviert sein!)

- 7 - 7
3. Bedienung Inbetriebnahme Vergewissern Sie sich vor dem Einschalten und bevor der Netzstecker in die Steckdose gesteckt wurde noch einmal, dass die beiden Stecker an der Unterseite des Steuergerätes eingesteckt sind! Platzieren Sie die Maschine so unter dem Netzgerüst, daß sich der Sammelbehälter unter dem Netzausschnitt befindet. Füllen Sie diesen Behälter mit genügend Bällen (min. 50-60 St.) und schalten Sie das Gerät am Roboter-Fuß ein.
Halten Sie beim Einschalten die mitgelieferte Fernbedienung griffbereit, damit Sie ggf. den Balltransport sofort unterbrechen können oder stellen Sie die Ballfrequenz (‘Ball/min’) auf 0 Bälle/min. Dadurch ist sichergestellt, dass aufgrund einer möglichen Falscheinstellung kein Ball unkontrolliert ausgeworfen wird. Nach dem Einschalten führt der Roboter einen kurzen Selbsttest (ca. 3 Sek.) durch. Danach schaltet sich das Steuerteil automatisch auf die Grundstellung. Die 1. gelbe Kontrollleuchte blinkt. Die Ballmaschine ist nun spielbereit.
Achtung: Befinden sich in der Maschine keine Bälle, dauert es ca. 30 Sekunden (je nach Einstellung der Ballfrequenz), bis der 1. Ball ausgeworfen werden kann! Zum besseren Verständnis und um eine fehlerfreie Bedienung der Maschine zu gewährleisten, werden im Folgenden die grundsätzlichen Funktionen ausführlich beschrieben, die Ihnen der "Amicus 1000Plus" bietet.
Vorsicht: Nicht zu dicht mit den Augen oder Haaren an die Auswurfrollen kommen. Verletzungsgefahr! Kinder nur unter Aufsicht den Roboter bedienen lassen.
Achtung: Nur Marken-Tischtennisbälle mit 40 mm Durchmesser ver-wenden! Möglichst ge-brauchte Bälle benutzen bzw. neue Bälle reinigen.

- 8 - 8
Einstellungen Die Ballmaschine kann die Bälle nach den folgenden Hauptmerkmalen auswerfen: a. ) Spin b. ) Geschwindigkeit Balltyp c. ) Höhe (Bogen, Länge) d. ) links - rechts Platzierung } Ballpositionierung Die Ballplatzierung auf die Tischecken wird gegenüber der Tischmitte durch eine patentierte Erfindung automatisch angepasst. Das heißt, wenn Sie die Platzierung der Bälle an mehrere Stellen mit der gleichen Auswurflänge programmieren, muss die Länge der Bälle nicht manuell eingestellt werden. Durch die Computersteuerung wird der Ball in der Mitte genauso lang sein wie der Ball nach außen, so dass kein Ball hinter dem TT-Tisch landet. Geschwindigkeit und Spin Wenn Sie den folgenden Hinweisen folgen, ist es sehr einfach die Geschwindigkeit und den Spin der Bälle einzustellen:
• Der Spin: Negative Zahlen bedeuten, die Bälle werden mit Unterschnitt ausgeworfen (-4 mehr Unterschnitt als –1). Positive Zahlen bedeuten, die Bälle werden mit Ober-schnitt/Spin ausgeworfen (umso größer der Wert, desto größer die Rotation). Wird der Regler auf den Wert „0“ eingestellt, werden Bälle ohne Rotation ausgeworfen.
• Die Geschwindigkeit (Speed) der Bälle ist umso höher, je größer der Wert eingestellt wird (1-22).
Beispiele: Einstellung Spin Einstellung Speed Ballauswurf
2 7 leichter Topspin, mittelschnell 5 16 viel Topspin, schnell -4 16 viel Unterschnitt -1 7 wenig Unterschnitt 0 10 ohne Spin, mittelschneller Schuss
Damit die Bälle die andere Tischhälfte erreichen ist eine sinnvolle Einstellung der Flug-kurve unbedingt erforderlich!

- 9 - 9
Flugkurve und Auswurflänge Zur Einstellung der Flugkurve wird die Rändelschraube am höchsten Punkt des Roboters ver-wendet. Verdrehen Sie die Schraube solange, bis Sie die gewünschte Flugkurve erhalten. • Drehen der Schraube im Uhrzeigersinn - Flugkurve wird flacher • Drehen der Schraube entgegen des Uhrzeigersinns - Flugkurve wird höher Um die Auswurflänge korrekt einzustellen, verdrehen Sie die Rändelschraube so lange, bis die Bälle den ungefähr gewünschten Treffpunkt erreichen. Durch vorsichtiges Bedienen des Dreh-reglers für Spin und Geschwindigkeit der Steuereinheit, wird dann die Feinabstimmung vorge-nommen.
Ballpositionierung 1. Auswurf der Bälle immer auf den gleichen Punkt des Tisches Nach dem Einschalten hat sich das Steuerteil automatisch auf die Grundstellung geschaltet, die 1. gelbe Kontrollleuchte blinkt. Das heißt, dass die Ballmaschine automatisch bereit ist, die Bälle auf einen bestimmten Punkt des Tisches auszuwerfen. Mit dem Drehregler für die links/rechts Platzierung, kann der entsprechende Treffpunkt des Balles auf dem Tisch stufenlos eingestellt werden. 2. Programmierter Auswurf der Bälle auf mehrere Punkte des Tisches Mit dem Druckknopf B "⇒" müssen mindestens 2 gelbe Kontrollleuchten aktiviert werden. Mit den entsprechenden rechts/links Drehreglern können dann die verschiedenen Balltreffpunk-te ausgewählt werden. Das blinkende Lämpchen zeigt an, welcher Ball als nächstes ausgewor-fen wird. Mit dem Druckknopf C "⇐" können die einzelnen Bälle wieder gelöscht werden. Nach Beendigung einer "Runde" beginnt der Ballauswurf wieder von vorne. Beispiel laut Einstellung der Steuereinheit auf Seite 5, wenn alle sechs Bälle aktiviert sind (alle sechs Lämpchen leuchten): erster Ball auf die Tischmitte, zweiter Ball auf die linke Tischhälfte, dritter und vierter Ball auf die rechte Tischhälfte, fünfter und sechster Ball in die Tischmitte. 3. Zufälliger Auswurf der Bälle auf mehrere Punkte des Tisches Mit dem Druckknopf B "⇒" müssen wieder mindestens 2 gelbe Kontrollleuchten eingeschaltet werden. Zur Aktivierung der Zufallsfunktion, muss nun der Druckknopf A (Pr/Rnd) betätigt werden. Das grüne Lämpchen leuchtet. Wurden nicht mindestens zwei Bälle ausgewählt, lässt sich trotz betätigen des Druckknopfes A das grüne Lämpchen nicht schalten, weil sonst mit nur einem aktivierten Ball die Zufallsfunktion keinen Sinn machen würde. Mit den entsprechenden rechts/links Drehreglern werden dann ebenfalls die verschiedenen Ball-treffpunkte ausgewählt. Die Bälle werden jetzt nach dem Zufallsprinzip zugespielt, wobei auch hier das blinkende Lämpchen anzeigt, welcher Ball als nächstes ausgeworfen wird. Mit dem Druckknopf C "⇐" können die einzelnen Bälle wieder gelöscht werden. INFO: Die Ballplatzierung auf die Tischecken wird durch unsere patentierte Erfindung gege-nüber der Tischmitte automatisch angepasst. Das heißt, wenn die Platzierung der Bälle an meh-rere Stellen und mit der gleichen Länge erfolgen soll, muss die Länge der Bälle nicht manuell angepasst werden. Durch die Computersteuerung wird der Ball in der Mitte genauso lang sein wie der Ball nach außen, so dass kein Ball hinter dem TT-Tisch landet.

- 10 - 10
Seitenschnitt Zur Einstellung des Seitenschnitts lösen Sie das Handrad an der linken Seite des Roboters. Der Auswurfkopf kann dann zu beiden Seiten um ca. 45 ° verdreht werden. Fassen Sie die Metallstreben so an, dass der Roboterkopf sich per Hand leicht verdrehen lässt und stellen Sie den ge-wünschten Winkel ein (Abb. 10). Ziehen Sie das Handrad wieder fest.
Abb.10
Ballfrequenz (Ball/min.) Mit dem Drehregler "3" können Sie die Einstellung der Ballfrequenz stufenlos wählen. Es ist eine Justierung von 0 bis 100 Bällen pro Minute einstellbar. Je größer der eingestellte Wert, desto schneller werden die Bälle nacheinander ausgeworfen. Höhenverstellung Die Höhenverstellung erfolgt durch Verstellung des Führungsrohres. Sie ist in vier Stufen möglich, und insgesamt 16 Zentimeter in der Höhe zu variieren. Einfach das Handrad des Füh-rungsrohres unterhalb der Steuereinheit lockern, die gewünschte Stufe wählen und das Rad wieder fixieren. Achtung: Die Feder im inneren des Handrades muss hörbar in eine der vier Rillen einrasten. Sonst werden die Bälle völlig unkoordiniert ausgeworfen. Fernbedienung Mit Hilfe der Fernbedienung lässt sich der Balltransport und somit die Ballzufuhr ein- bzw. ausschalten. Somit kann der Spieler, wenn er alle erforderlichen Einstellungen am Steuergerät vorgenom-men hat, seine Spielposition einnehmen und über den Schalter der Fernbedienung den Ball-transport der TT-Ballmaschine ein- und ausschalten. Hinweis: Mit der Fernbedienung können Sie nur den Balltransport aus- bzw. einschalten. Die Auswurfrollen drehen sich weiter! Ausschalten und außer Betrieb setzen des Amicus 1000plus Wenn Sie die Ballmaschine ausschalten wollen, betätigen Sie den roten Hauptschalter am Ro-boterfuß und ziehen Sie den Netzstecker aus der Steckdose. Bitte entfernen Sie die beiden Ka-belstecker an der Steuereinheit erst nach dem Ausschalten des Roboters. Lagern Sie den Ami-cus 1000plus möglichst an einem staub-, frostfreien und trockenen Ort. Transport An der Unterseite des Roboterfußes befinden sich zwei Räder, um den Roboter zu transportie-ren. Winkeln Sie dazu die Ballmaschine leicht an und rollen Sie die Maschine an den ge-wünschten Platz
- 11 - 11
4. Wartung und Instandsetzung Wichtig: Bevor Sie Wartungs- oder Instandsetzungsarbeiten durchführen, ziehen Sie immer zuerst den Netzstecker aus der Steckdose! − Während des Betriebes ist sorgfältig darauf zu achten, daß keine Kleinteile (z. B.
Haare, eingedrückte Bälle, etc.) in die Auffangschale und damit in die Maschine gera-ten, weil dieses zu Störungen (Ballstau) führen kann.
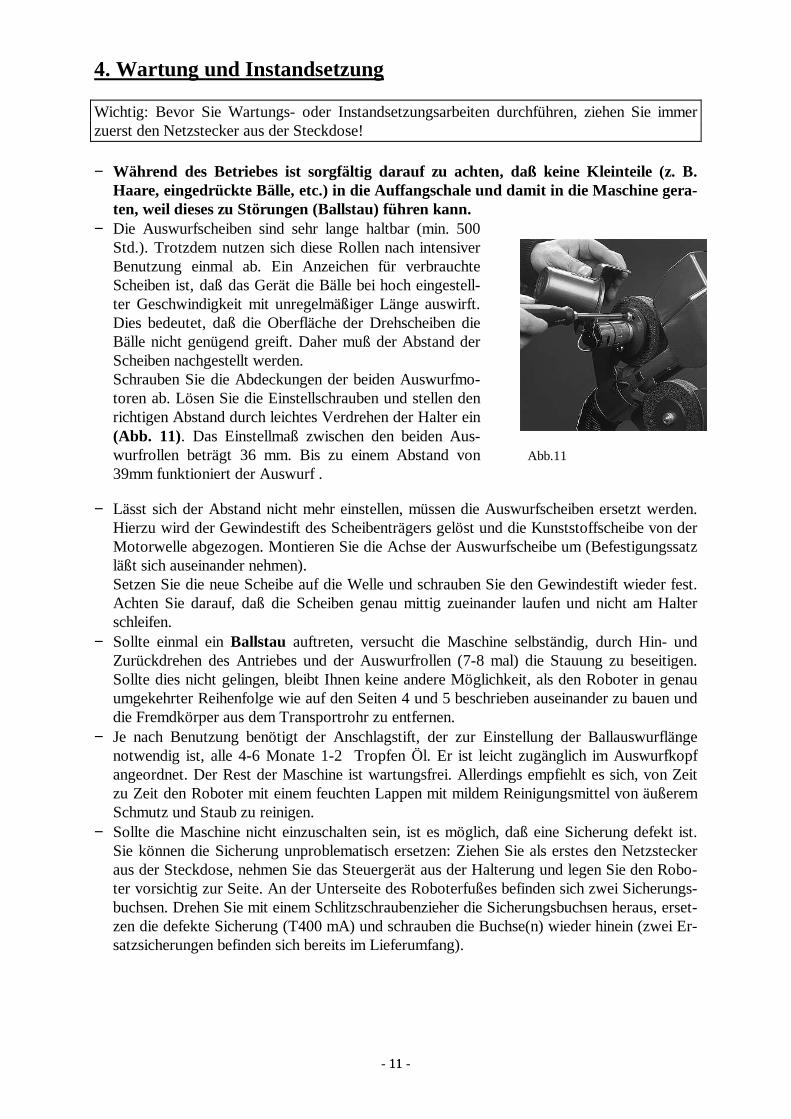
− Die Auswurfscheiben sind sehr lange haltbar (min. 500 Std.). Trotzdem nutzen sich diese Rollen nach intensiver Benutzung einmal ab. Ein Anzeichen für verbrauchte Scheiben ist, daß das Gerät die Bälle bei hoch eingestell-ter Geschwindigkeit mit unregelmäßiger Länge auswirft. Dies bedeutet, daß die Oberfläche der Drehscheiben die Bälle nicht genügend greift. Daher muß der Abstand der Scheiben nachgestellt werden. Schrauben Sie die Abdeckungen der beiden Auswurfmo-toren ab. Lösen Sie die Einstellschrauben und stellen den richtigen Abstand durch leichtes Verdrehen der Halter ein (Abb. 11). Das Einstellmaß zwischen den beiden Aus-wurfrollen beträgt 36 mm. Bis zu einem Abstand von 39mm funktioniert der Auswurf .
Abb.11
− Lässt sich der Abstand nicht mehr einstellen, müssen die Auswurfscheiben ersetzt werden. Hierzu wird der Gewindestift des Scheibenträgers gelöst und die Kunststoffscheibe von der Motorwelle abgezogen. Montieren Sie die Achse der Auswurfscheibe um (Befestigungssatz läßt sich auseinander nehmen). Setzen Sie die neue Scheibe auf die Welle und schrauben Sie den Gewindestift wieder fest. Achten Sie darauf, daß die Scheiben genau mittig zueinander laufen und nicht am Halter schleifen.
− Sollte einmal ein Ballstau auftreten, versucht die Maschine selbständig, durch Hin- und Zurückdrehen des Antriebes und der Auswurfrollen (7-8 mal) die Stauung zu beseitigen. Sollte dies nicht gelingen, bleibt Ihnen keine andere Möglichkeit, als den Roboter in genau umgekehrter Reihenfolge wie auf den Seiten 4 und 5 beschrieben auseinander zu bauen und die Fremdkörper aus dem Transportrohr zu entfernen.
− Je nach Benutzung benötigt der Anschlagstift, der zur Einstellung der Ballauswurflänge notwendig ist, alle 4-6 Monate 1-2 Tropfen Öl. Er ist leicht zugänglich im Auswurfkopf angeordnet. Der Rest der Maschine ist wartungsfrei. Allerdings empfiehlt es sich, von Zeit zu Zeit den Roboter mit einem feuchten Lappen mit mildem Reinigungsmittel von äußerem Schmutz und Staub zu reinigen.
− Sollte die Maschine nicht einzuschalten sein, ist es möglich, daß eine Sicherung defekt ist. Sie können die Sicherung unproblematisch ersetzen: Ziehen Sie als erstes den Netzstecker aus der Steckdose, nehmen Sie das Steuergerät aus der Halterung und legen Sie den Robo-ter vorsichtig zur Seite. An der Unterseite des Roboterfußes befinden sich zwei Sicherungs-buchsen. Drehen Sie mit einem Schlitzschraubenzieher die Sicherungsbuchsen heraus, erset-zen die defekte Sicherung (T400 mA) und schrauben die Buchse(n) wieder hinein (zwei Er-satzsicherungen befinden sich bereits im Lieferumfang).

- 12 - 12
5. Fehlerbehebung Problem Behebung Ein/Aus Schalter leuchtet nicht; Ballmaschine lässt sich nicht einschalten
a) Steckdose ohne Strom? b) Sicherung defekt ⇒ Sicherung ersetzen (siehe Seite 10)
Ein/Aus Schalter leuchtet, aber die Auswurf-rollen bewegen sich nicht; gelbe Kontroll-leuchte am Steuergerät blinkt nicht
Kontrollieren, ob die Kabelstecker an der Un-terseite des Steuergerätes richtig eingesteckt wurden
Ein/Aus Schalter leuchtet; gelbe Kontroll-leuchte blinkt; kein Balltransport
a) Fernbedienung ausgeschaltet? b) Drehregler 3 für Ballfrequenz auf "Null"?
Ballauswurf mit unregelmäßiger Länge a) Abstand der Auswurfrollen überprüfen, Verschleiß (siehe Seite 10)? b) Fehlerhafter Zusammenbau des Roboters; wurden das Ballführungs- oder Mantelrohr bzw. der Roboterkopf bis zum Anschlag mon-tiert? c) Anschlagstift zur Einstellung der Auswurf-länge "hängt" ⇒ leicht einölen
Roboter wirft plötzlich völlig unregelmäßig und mit verschiedenen Längen die Bälle aus;
a) Neustart (Roboter kurz aus- und dann wie-der einschalten) b) Fremdteil oder defekter Ball behindert den Balltransport ⇒ entfernen (siehe Seite 10) c) Das Handrad der Höhenverstellung ist nicht genau in eine Rille des Rohres positioniert (Feder rastet hörbar ein)
Ballstau; Steuereinheit schaltet sich ab a) Fremdteil oder defekter Ball behindert den Balltransport ⇒ entfernen (siehe Seite 10) b) Im Ballbehälter befinden sich zu viele bzw. neuwertige Bälle. Behälter mit max. 50-80 Bällen befüllen, neuwertige Bälle vom „Zellu-loid-Staub“ befreien
Zufallsfunktion an der Steuereinheit lässt sich nicht aktivieren, grüne Kontrollleuchte nicht einschaltbar
es müssen mindestens zwei Bälle aktiviert sein, mindestens zwei gelbe Kontrollleuchten müssen an sein (siehe Seite 8)
Ball bleibt zwischen den Auswurfrollen ste-cken, Steuereinheit schaltet sich ab
Hauptschalter ausschalten, Ball zwischen den Rollen entnehmen, Einstellung der Drehregler 1 und 2 ändern (siehe Seite 7), Roboter wieder einschalten
Achtung: Sollten Sie die Probleme anhand dieser Checkliste nicht lösen können, muss ein Fachmann hinzu gezogen werden! Bitte wenden Sie sich an Ihren Händler oder an die Butterfly Service Adresse (Seite 13). Ziehen Sie auch immer einen Fachmann hinzu, wenn das Netzkabel beschädigt ist oder die Si-cherungen trotz Tausch sofort wieder durchbrennen! Sie verlieren sonst während der zwei Jah-re Garantie jeden Anspruch auf Gewährleistung.

- 13 - 13
6. Ersatzteilliste
Ersatzteilliste 1000-100 Steuergerät 1000-102 Ballgeschwindigkeitsmotor 1000-104 Lademotor 1000-106 Schwenkkopfmotor 1000-108 Auswurfscheibe 1000-110 Achse für Auswurfscheibe 1000-112 Ballplatzierungs-Mechanismus 1000-114 Fernbedienung 1000-116 Sicherung (T 400 mA/250V) 1000-118 Transformator 1000-120 Gehäuse für Roboterfuß 1000-122 Mantelrohr 1000-124 Motorgehäuse (2 St.) 1000-126 Ballbehälter 1000-128 Auffangnetz 1000-130 Netzgerüst 1000-132 Verlängerungskabel für 1000-134 Halter für Steuergerät Fernbedienung 1000-136 Motor für Höhenverstellung Weitere Ersatzteile auf Anfrage !
7. Technische Daten Netzstrom: 230 V, 50 Hz Wechselspannung, ca. 50 W Berührungsschutzklasse: I. Die Maschine kann im Außentemperaturbereich von 0 - 40 °C in Betrieb genommen werden. Sicherungen: 2 St. T 400 mA Gewicht: 10 kg (ohne Netz) Abstellmaße (ohne Netz): Höhe 1,20 m; Breite 0,35 m; Tiefe 0,68 m Das elektrische Erzeugnis -Ballmaschine AMICUS 1000plus- wurde einer Baumusterprü-fung unterzogen und die Art und Ausführung der vorgestellten Baumuster wurden als in Über-einstimmung mit der angegebenen Norm befunden. EN 61010-1:1993+3000. 2 (1995) = IEC 1010-1:1990 - 3000.1,2 EN 50081-1:1992 ENV 50140:1993 EN 55014:1993 EN 61000-4-2:1995 EN 61000-3-2:1995 EN 61000-4-4:1995 EN 61000-3-3:1995 EN 61000-4-5:1995 EN 55104:1995 EN 61000-4-11:1994 wie aus dem Prüfbericht mit der Nr. E-00136 und E-00136/1 hervorgeht. Dieser Prüfbericht besagt, daß der Roboter AMICUS 1000plus das CE - Markenzeichen tragen darf. Tamasu Butterfly Europa GmbH * Am Schürmannshütt 30h * D - 47441 Moers
Telefon +49 (0)2841-9053223, Fax: +49 (0)2841-9053220 E-Mail: [email protected]
www.butterfly-world.com