an early-warning service for emerging communication problems in security and safety applications
TRANSCRIPT

IEEE Communications Magazine • May 2013186 0163-6804/13/$25.00 © 2013 IEEE
INTRODUCTION
First responders are severely dependent on reli-able wireless communications for emergencyoperations. Several real examples show how anoperation can be disturbed and get out of con-trol if the wireless voice communication is dis-rupted for some reason. A typical example is ifthe smoke-diver radio for fire fighters is disrupt-ed. As an example, this issue came to the fore-front in April 2008, when two firefighters inCincinnati died in a blaze on Squirrel’s NestLane. A review of the radio calls made duringthe fire showed that the firefighters repeatedlymade mayday calls, which were never transmit-ted [1]. The International Association of FireChiefs has released an interim report concerningpossible communications problems involving dig-ital two-way portable radios in close proximity tocommon fireground noise [2]. Another exampleof the importance of robust wireless communica-tions is from the terrorist attack in Norway onJuly 22, 2011. Public media reports that the newdigital radio system for first responders did not
have sufficient coverage at Utöya, which is whythe district police used the older non-encryptedanalog system. The elite Delta unit, dispatchedto tackle the gunman, and paramedics hadswitched to a new secure digital network [3]. Atthe same time, the mobile network was downdue to overload of too many people trying tocall from their mobile phones. As a consequence,the police commanders had to contact differentunits via email and even fax.
Another example is when intentional jam-ming is used against first responders. During theEU summit in Gothenburgh, Sweden, in 2001,the situation went chaotic and out of controlwhen the demonstrators took advantage of thevulnerability of the police radio system againstelectromagnetic interference [4]. By using a jam-mer located in a nearby apartment, the demon-strators managed to deliberately disturb theradio system during critical phases of the opera-tion. In [4] it is stated that during critical phasesof these riots, the communication problems wereso large that the chief commander could notreach any of the 700 police officers that wereengaged to handle the riots. Deliberate jammingis nowadays used frequently by criminals (seee.g. [5]) and equipment for jamming wireless sys-tems can easily be bought on the Internet foronly a few hundred dollars.
Disrupted communications or other perfor-mance degradations can have several reasonssuch as:• Unintentional interference from other wire-
less systems or electronic equipment.• Intentional interference from jammers. The
use of illegal jamming is continuouslyincreasing in criminal actions.
• Lack of radio coverage. This can typicallyoccur in indoor environments, tunnels, orrural areas.
• Congestion due to many users in a system.This is the common situation, e.g. when thepublic mobile networks get overloaded dur-ing disasters or other large scale events. First responders report to the authors that
ABSTRACT
Experience has shown that unpredictable dis-ruption of communications during emergencyoperations can have severe consequences bothfor personal safety and for the ability to conducta successful operation. An early-warning servicefor emerging communication disruption due toboth unintentional interference and jamming,would therefore be a significant contribution forincreased safety and security in such operations.We propose a solution for such an early-warningservice both on the terminal and on higher sys-tem level. The solution is based on historicalrecorded data of both local and global informa-tion such as signal-to-interference ratio, interfer-ence classification, and position. We show by anexample that with this service implemented, theoperator will have increased time to take actionsbefore a disruption occurs on a specific terminal.
ACCEPTED FROM OPEN CALL
Peter Stenumgaard, Swedish Defence Research Agency and Linköping University
Daniel Persson and Erik G Larsson, Linköping University
Kia Wiklundh, Swedish Defence Research Agency
An Early-Warning Service for Emerging Communication Problems inSecurity and Safety Applications
STENUMGAARD LAYOUT_Layout 1 4/29/13 1:12 PM Page 186

IEEE Communications Magazine • May 2013 187
the shift from analog to digital radio systems hasone major practical drawback with respect tounpredictable communication problems. In olderanalog systems it was possible, at an early stage,to perceive an emerging communication problemsince the analog device in general has a rathersmooth transition from a state with high commu-nication quality to a state with low communica-tion quality. The analog device gradually andnaturally indicates to the user if interference orother reception problems are approaching. If thedevice is used for voice communication, the indi-cation can typically appear as an increasing noiselevel. This gives the user the possibility to takeactions to prevent disruption such as moving toanother position.
In a digital system, the transition from highto low communication quality goes very rapidly,with no chance for the user to react with precau-tions because the used channel code does notgive any improvement beyond a specific noiselevel. Furthermore, in civilian wireless communi-cation systems, capacity has almost always thehighest priority since billing as many users for asmuch data as possible is the overall purpose ofthose systems. One drawback with this priority isthat optimization for capacity automatically giveslow robustness against interference. This isbecause robustness against interference alwaysrequires that some redundancy is added to thesystem. One common solution is to use errorcorrecting codes, where some amount of thedata bits is dedicated only for error correction ofinformation bits. Another solution is to use fre-quency hopping over a larger frequency regionthan is necessary if only the information bitswould be transferred without any robustnessagainst interference. Another type of system isthe TETRA (TErrestrial TRunked RAdio) stan-dard [6] that is frequently used for radio com-munication in first responder systems. TETRAsystems are not particularly resistant to interfer-ence but are well encrypted against eavesdrop-ping. In military systems, however, robustnessalways has the highest priority since it is of vitalimportance that all information reaches the enduser even if hostile jamming is present. This pri-ority gives lower capacity, e.g. in the form of alower number of possible users.
As the communication resources, such as fre-quencies, are limited, there will always be a riskfor communication disruptions. An early-warn-ing service with the ability to warn the user whenthe digital system is approaching its transitionpoint would be of significant help to identifyunpredictable communication problems beforethey lead to disruption. Furthermore, if this ser-vice is integrated in the overall command & con-trol system for the operation, significant decisionsupport can be given to identify hostile jammingor other local interference problems at the users(see Fig. 1). Figure 1 shows an example of a cell-based communication system with both uninten-tional and intentional (jamming) interferencepresent. If each terminal sends a status messageabout the interference situation to the highercommand & control level, the fusion of thesestatus messages gives an overview of the interfer-ence situation for all users in the area.
Today, different solutions exist for indicating
when the actual signal to noise and interferenceratio (SINR) is close to resulting in a transition.The SINR is here defined as the signal powerdivided by the sum of receiver noise and inter-ference power in the receiving unit. One exam-ple of counteraction when the SINR becomestoo low is handover of mobile terminals to a newbase station. Another example is terminal indica-tors that warn when the SINR goes below a cer-tain value. However, what is common for theseexisting solutions is that they are reactive in thesense that they do not give any warning abouthow fast an emerging communication problem isapproaching. Terminal indicators do exist, butcould be much improved, incorporating globalpropagation of information in the system, statis-tical modeling of the environment, interferenceclassification, as well as GPS (Global PositioningSystem) information by comparison with histori-cal recorded data for the location. When the“indicator” gives a warning, a handover takesplace or the terminal does already experienceproblems that affect the application. Further-more, handover is not always an available solu-tion in an emergency operation. Examples areoperations in underground facilities, tunnels,buildings, and large ships. In such scenarios,handover is not always an option. If no otherbase station is available for handover, disruptionwill occur if the SINR goes below the criticalvalue. Moreover, a handover to another basestation may not always solve interference prob-lems if the interference source is located in thevicinity of the terminal. The signal to noise ratio(SNR) always varies with the position of a cer-tain terminal (due to small-scale fading). Fur-thermore, the interference from nearby cells alsovaries with the position of the terminal. Thismeans that even without hostile jamming andother unintentional interference sources, com-munication problems can occur.
By extending solutions of a more reactiveindicating nature to a proactive service for earlywarning, unpredictable communication problems
Figure 1. The early warning service on terminal, group, and system level.
Unintentionalinterference
Terminal warning(locally generated)
Jamming
Area for the emergencyoperation
Systemwarning
Statusmessage (TSM)
Groupwarning
Command and control system
In a digital
wireless system,
the transmission
from high to low
communication
quality goes
very rapidly
STENUMGAARD LAYOUT_Layout 1 4/29/13 1:12 PM Page 187

IEEE Communications Magazine • May 2013188
can be identified and reduced. This is done bymerging information from many users and basestations (BSTNs), merging SINR and GPS infor-mation, interference localization and classifica-tion.
In this article we propose early warning ser-vices on both the terminal and higher systemlevel. The article is organized as follows. In thenext section, the early warning service is pro-posed. Then, an early warning service for thehigher system level is proposed, followed by aproposal of how such a service on the terminallevel can be designed. Examples of the enablingtechnology for this service are given and oneexample is shown of how MIMO (Multiple InputMultiple Output) technology can facilitate andimprove the capability for jamming identificationin systems providing multiple antennas. The arti-cle is finally concluded and it is found that ourproposed service gives results that improve thepossibilities to identify at an early stage emerg-ing communication problems due to unintention-al interference or jamming.
OVERVIEW OF THE SERVICE FOREARLY WARNING
A basic version of an early warning service givesthe user a proactive early warning when thetransition region in Fig. 2 is approached with acritical velocity. An early-warning service woulddetect not only when the critical threshold isexceeded, but also take into account, for exam-ple, how fast this threshold is approaching, hownearby users perceive the situation, and if thereare signs of interference or jamming that indi-
cate an emerging communication problem (seeFig. 1). Figure 1 shows an example of how thisservice could be available on a higher systemlevel in a command & control (C2) system asdecision support to highlight if an interferenceor jamming problem is emerging and threateningthe safety of the personnel. Each terminal trans-mits a status message that is used as decisionsupport on the C2 system level to take actionssuch as sending out a warning to a certain groupof terminals or all terminals as a system warning.The warning services can be implemented eitherat the terminal level, the C2 level, or at both lev-els. The C2 level can also take into account pre-vious received status messages. The historicalinformation of the status in the terminals canimprove the situation awareness regarding, forexample, the cause of the problem and whensuggesting a counteraction
STANDALONE SERVICE FOREARLY WARNING ON TERMINAL LEVEL
The early warning service is a function that gen-erates a warning and a status message at the ter-minal (see Fig. 1) by taking into account both thelocal and global communication and interferencesituations. To be more specific, an early warningservice may be implemented locally at the termi-nal as emulated analogue noise so that the userperceives an approaching communication disrup-tion in the same way as if the radio link was ana-logue. The service is designed by extendingexisting functions that monitor the SINR and byconsidering the GPS position, historical recordeddata, other users, and BSTN data.
Information from g and (where g◊(r–i(t) is thetime derivative of the SINR of terminal i), areused to produce an emulated noise sound at theterminal if an interference situation is approach-ing. This is done if the following two criteria arefulfilled at the same time:• The SINR is lower than a pre-defined
threshold.• The SINR is decreasing (corresponding to a
negative g◊).The threshold gc is the SINR value when therapid transition from “good” to “bad” communi-cation state occurs and can often be found in atechnical specification of the system. Further-more, Dg is the width of the chosen for howearly the warning is activated (see Fig. 2). Thesize of the SINR region Dg is decided by addinga predefined margin to the critical threshold gc.This margin is dependent on the technical prop-erties of the terminal and will typically be in theorder of 3–6 dB.
Furthermore, a status message may be pro-duced in each terminal. The status message indi-cates:• The received SINR value gi(r–i(t), where the
position vector r–i is the physical three-dimen-sional positioning vector for terminal i.
• Indication of whether the SINR is increas-ing or decreasing with time, by showing + or – , respectively.
• The type of interference: C for co-channelinterference, I for unintentional interfer-ence, and J for jammer.
• Position of the terminal.
Figure 2. The basic feature of an early warning service on the terminal level.The service is designed by extending existing functions of monitoring SINR, toconsider GPS position, historical recorded data, other users and BSTN data.
Communicationquality
Good
Bad
γcγi(r
-i(t))
∆γ
Early warning
STENUMGAARD LAYOUT_Layout 1 4/29/13 1:12 PM Page 188
IEEE Communications Magazine • May 2013 189
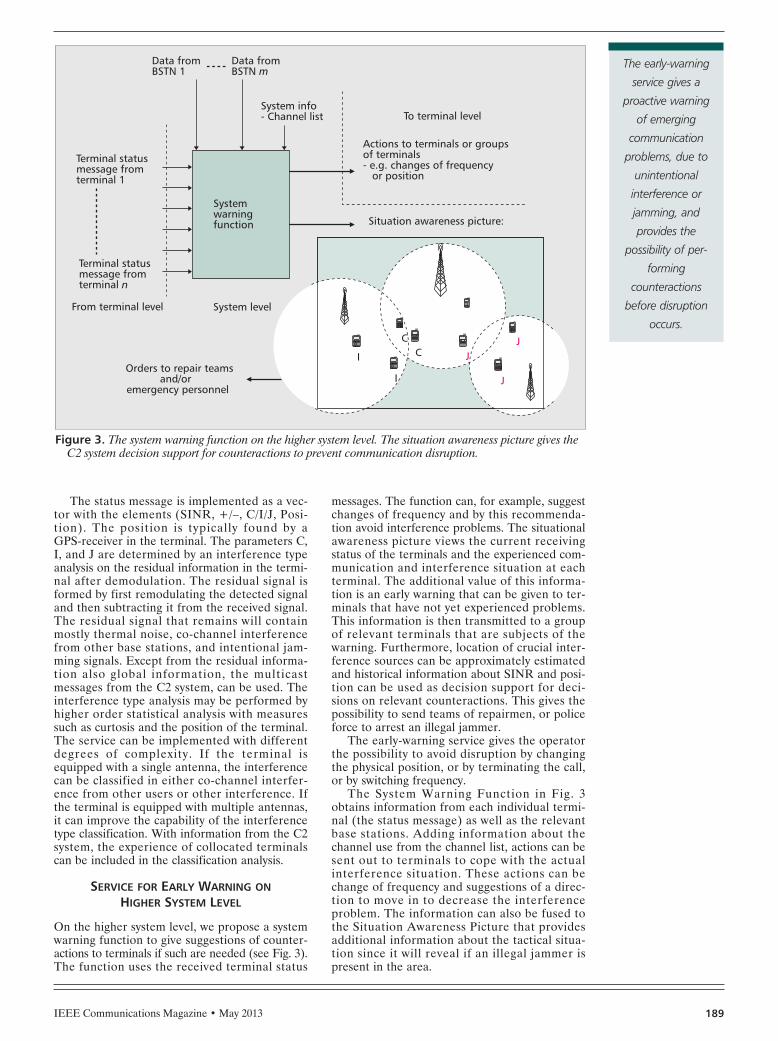
The status message is implemented as a vec-tor with the elements (SINR, +/–, C/I/J, Posi-tion). The position is typically found by aGPS-receiver in the terminal. The parameters C,I, and J are determined by an interference typeanalysis on the residual information in the termi-nal after demodulation. The residual signal isformed by first remodulating the detected signaland then subtracting it from the received signal.The residual signal that remains will containmostly thermal noise, co-channel interferencefrom other base stations, and intentional jam-ming signals. Except from the residual informa-tion also global information, the multicastmessages from the C2 system, can be used. Theinterference type analysis may be performed byhigher order statistical analysis with measuressuch as curtosis and the position of the terminal.The service can be implemented with differentdegrees of complexity. If the terminal isequipped with a single antenna, the interferencecan be classified in either co-channel interfer-ence from other users or other interference. Ifthe terminal is equipped with multiple antennas,it can improve the capability of the interferencetype classification. With information from the C2system, the experience of collocated terminalscan be included in the classification analysis.
SERVICE FOR EARLY WARNING ONHIGHER SYSTEM LEVEL
On the higher system level, we propose a systemwarning function to give suggestions of counter-actions to terminals if such are needed (see Fig. 3).The function uses the received terminal status
messages. The function can, for example, suggestchanges of frequency and by this recommenda-tion avoid interference problems. The situationalawareness picture views the current receivingstatus of the terminals and the experienced com-munication and interference situation at eachterminal. The additional value of this informa-tion is an early warning that can be given to ter-minals that have not yet experienced problems.This information is then transmitted to a groupof relevant terminals that are subjects of thewarning. Furthermore, location of crucial inter-ference sources can be approximately estimatedand historical information about SINR and posi-tion can be used as decision support for deci-sions on relevant counteractions. This gives thepossibility to send teams of repairmen, or policeforce to arrest an illegal jammer.
The early-warning service gives the operatorthe possibility to avoid disruption by changingthe physical position, or by terminating the call,or by switching frequency.
The System Warning Function in Fig. 3obtains information from each individual termi-nal (the status message) as well as the relevantbase stations. Adding information about thechannel use from the channel list, actions can besent out to terminals to cope with the actualinterference situation. These actions can bechange of frequency and suggestions of a direc-tion to move in to decrease the interferenceproblem. The information can also be fused tothe Situation Awareness Picture that providesadditional information about the tactical situa-tion since it will reveal if an illegal jammer ispresent in the area.
Figure 3. The system warning function on the higher system level. The situation awareness picture gives theC2 system decision support for counteractions to prevent communication disruption.
System info- Channel list
Data fromBSTN m
Data fromBSTN 1
Terminal statusmessage from terminal 1
Terminal statusmessage fromterminal n
System level
Situation awareness picture:
To terminal level
From terminal level
Actions to terminals or groupsof terminals- e.g. changes of frequency or position
CC
I
IJ
J
J
Systemwarningfunction
Orders to repair teamsand/or
emergency personnel
The early-warning
service gives a
proactive warning
of emerging
communication
problems, due to
unintentional
interference or
jamming, and
provides the
possibility of per-
forming
counteractions
before disruption
occurs.
STENUMGAARD LAYOUT_Layout 1 4/29/13 1:12 PM Page 189

PRACTICAL EXAMPLES OF THEEARLY WARNING SERVICE
EARLY WARNING ON TERMINAL LEVEL
An example of the usefulness of an early warn-ing function on the terminal level is shown inFig. 4 and Fig. 5. The scenario includes a modelof a TETRA terminal with standard communica-tion parameters. Typical distances for TETRAcommunications are in the order of 50 kmbetween base station and terminal. TETRA sys-tems can also use direct mode communicationbetween two terminals at distances up to approx-imately 2 km. In the vicinity of the TETRAreceiver, an interference source is located tosimulate a jammer or an unintentional interfer-ence source. The interference source is locatedin the centre of the red coloured area in Fig. 4.The interference source consists of radiatedemission from a personal computer (PC). Theinterference level has been determined by mea-surements. In this case, the interference level is
in the same order as the standard emission limitEN 55022 which specifies the maximum allowedlevel of radiated emission for equipment inoffice environments and is the commonly adopt-ed standard for ordinary PCs. The interferencesource is assumed to generate Additive WhiteGaussian Noise (AWGN). If the noise is non-Gaussian, the same method can be used. Forsuch situations the interference waveform needsto be compensated for. We assume a voice ser-vice with the requirement of the coded bit errorprobability Pb < 10–2, as the maximum limitbefore disruption if a good voice encoder isused. For Pb < 10–3, the quality of a voice ser-vice is often considered to be acceptable, i.e. alevel where some noise is present but the voiceis still possible to identify. The radio wave prop-agation path loss is modeled by a classical twobeam model (one direct and one reflected com-ponent) over ideal earth. The results have beengenerated by the software simulator GENESIS[7] that is developed for intersystem interferenceanalyses in wireless communication.
In Fig. 4, the areas are color coded accordingto the resulting bit error probability (BEP) inthe receiver. The red area represents a resultingBEP at the terminal of a BEP 10–2 or higher,whereas the yellow coloured region correspondsto the rapid transition when the BEP goes from10–3 to 10–2. That is, the yellow area indicatesthe region where you may begin to experiencecommunication problems. As seen in the figure,the yellow area is very small and the transitionfrom the green area to the red area will occurrapidly; in this example the transition betweenthe good to the bad state occurs within 2–3 m.In Fig. 5, the early warning service is activated.Here, we assume that a warning is generatedwhen the SINR is lower than gc + Dg (see Fig. 2).This is accomplished by analysing the BEP thatcorresponds to the SINR value. In this simula-tion, the warning is generated as the BEPexceeds 10–6. With this in mind, the yellow col-ored region is now representing BEP valuesbetween 10–6 and 10–2, and represents the areawhere the warning begins to be noticeable. Asseen, the early warning service widens the yellowarea to about 10 meters and enables the user totake counteractions before disruption occurs.One counteraction could be to change the physi-cal position of the terminal to avoid disruption.
JAMMING DETECTION BY MEANS OF ANANTENNA ARRAY
For vehicle mounted terminals or base sta-tions, multi-antenna solutions can be used tofurther improve an early warning service. Animportant issue is the detection and classifica-tion of an intentional or unintentional interfer-ence source. In this section, we illustrate how touse standard multi-antenna techniques to detectan interference source and to identify the num-ber of antenna elements of the interferencesource.
Consider a sequence of complex basebandsignal vectors yk received by an antenna arraywith M elements,
yk = Hsk + Gs¢k + wk (1)
IEEE Communications Magazine • May 2013190
Figure 4. The transition region illustrated as physical distance between aninterference source and a model of a TETRA receiver in the vicinity of aninterfering PC. The yellow area corresponds to the transition region.
2 metersInterferencesource
Disruptedcommunication
Figure 5. The same scenario as in Fig. 4, but with the early warning serviceimplemented on terminal level. As seen, the early warning, corresponding toDg in Fig. 3, is activated so that the yellow region is widened enabling the userto take counteractions before disruption occurs.
10 metersInterferencesource
Disruptedcommunication
Multiple-antenna
technology
adds the possibility
of jammer
identification
in an
early-warning
service
STENUMGAARD LAYOUT_Layout 1 4/29/13 1:12 PM Page 190

IEEE Communications Magazine • May 2013 191
where H is the channel to the transmitters, thevector sk contains the q transmitted symbols ofinterest, G is the channel to the interferer, s¢kcontains the q¢ components transmitted by theinterferer, and wk is a vector containing thermalnoise components. Our primary task is to deter-mine whether G π 0 (interferer present) or G = 0(no interferer present). The secondary task is tounderstand how many signal components theinterferers have, i.e. to estimate q¢. The parame-ter q¢ thus corresponds to the number of inter-ferer antennas in frequency-flat fading. Thepresented technique below is commonly denotedas blind in that it does not use explicit knowl-edge of the interferer channel, interferer tempo-rary signal vector, or q¢. Under quite generalcircumstances, the signal of interest can beretrieved from the received signal by standardmethods such as interference rejection combin-ing, even in the presence of strong jamming, aslong as the channel of the interferer is signifi-cantly different from that of the desired trans-mitter [8]. Alternatively, one can dedicate a fewsymbol transmission times to listening for theinterferer. To find out whether an interferer ispresent, we can then form the sample covariancematrix of the interference and noise, and designa statistical test based on the eigenvalues. Forexample, given that q¢ < M, a simple test is tolook at the ratio between the largest and thesmallest eigenvalue of the sample covariancematrix, and compare this against a threshold. Bycomparing the ratio of the second largest eigen-value to the smallest eigenvalue against a thresh-old, we can decide if the interferer has twoantennas, and so forth. This problem is similarto problems that arise in spectrum sensing forcognitive radio with multiple antennas, and tech-niques from there can be used more or lessdirectly [9]. There is a rich literature on blinddetection with unknown q¢ [10].
In Fig. 6, we illustrate the simple subspacemethod above. We choose to use 20 interferencemeasurements per TETRA time slot, M = 5,and q ¢ = 3. For each value of the detectionthreshold, we conduct 2000 experiments in orderto estimate the probability of interferer antennadetection, and the probability of interfererantenna false alarm. The blue and red curves aregenerated by using one time slot for detection,while the green curve is generated by using allfour TETRA time slots. The eigenvalue subjectto detection in Fig. 6 is the third largest one, i.e.we are trying to detect the last component of the3-component-interferer.
We note that in a scenario where the inter-ferer is weak, it is for many purposes not neces-sary to detect interference, since the interfererdoes no harm. However, the interferer may becloser to other communicating first responders,who are not equipped with an early warning sys-tem, or we may want to figure out how the jam-ming situation will be in the future when theinterferer has had time to move closer to us. Inthese scenarios, we are interested also in a faintjamming signal.
TETRA uses TDMA with 18000 symbols/sand around 18 frames/s, each consisting of fourslots. This means that we have 250 symbols perslot. The slot also spans 0.014 s, in which an
interferer driving with a velocity of 50 km/hmoves 20 cm. Since the TETRA wave lengthsare usually around 0.75 meter, we can considerthe channel as constant during a time slot formany applications. We here note that it is hard-er to detect a moving interferer than a stationaryone. The movement of the interferer can beunderstood by observing the changes in the sam-ple covariance matrix over several time slots.The early-warning system could as well switchbands between time slots.
It can be of interest to estimate the interferereigenvectors in order to perform interferencecancellation. Given that q¢ < M, we can estimatethe eigenvectors corresponding to the q¢ largesteigenvalues of the sample covariance matrix (see[11] for further information).
CONCLUSIONSExperience has shown that unpredictable com-munication problems during emergency opera-tions can have severe consequences both forpersonal safety and for the ability to conductsuccessful emergency operations. Furthermore,several real-world situations show that intention-al jamming is increasingly used by criminals andduring riots. We propose a concept for an early-warning service on both the terminal and systemlevels. The purpose of this service is to give theuser an early warning of emerging communica-tion problems, such as disruption, and therebyenable both single users and the command &control system to take counteractions in time.We have shown by an example that the width ofthe transition region for the shift from goodcommunication quality to disruption can bewidened from 2 meters to 10 meters when the
Figure 6. Detection performance of the subspace algorithm for interferer anten-na detection. In particular, we detect antenna 3 for an interferer with q¢ = 3components and we use M = 5 receive antennas. The probability of detectionis plotted against the probability of false alarm. The blue and red curves aregenerated by using one time slot for detection, while the green curve is generat-ed by using all four time slots for a stationary jammer.
Probability (false alarm)0.10
0.1
0
Prob
abili
ty (
dete
ctio
n)
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
SNR=1 dBSNR=4 dBSNR=1 dB, 4 time slots
STENUMGAARD LAYOUT_Layout 1 4/29/13 1:12 PM Page 191

IEEE Communications Magazine • May 2013192
early warning service is used. We have alsoshown how this service can be used to detecthostile jamming against critical wireless commu-nications.
ACKNOWLEDGEMENTSThis work was partly financed by Security Link,the Swedish Foundation for Strategic Research(SSF), and the Swedish Defence MaterielAdministration. E.G. Larsson is a Royal SwedishAcademy of Sciences (KVA) Research Fellowsupported by a grant from the Knut and AliceWallenberg Foundation.
REFERENCES[11] M. Viberg, B. Ottersten, and T. Kailath, “Detection and
Estimation in Sensor Arrays Using Weighted SubspaceFitting,” IEEE Trans. Sig. Proc., vol. 39, 1991, pp.2436–49.
[1] Radio Woes: Digital Radio Problems Surface in LastWeek’s Mayday in Cincinnati, Newspaper Looks at theIssue, Sharon Coolidge at statter911.com, Jan. 16,2010.
[2] International Association of Fire Chiefs, “Interim Reportand Recommendations: Fireground Noise and DigitalRadio Transmissions,” Accessed June 3, 2009.
[3] Police Operation to Rescue Norway Terror Attack Vic-tims Hampered by Communications Blunder, RyanParry, Daily Mirror 2/08/2011.
[4] Report issued by the Swedish Ministry of Justice:“Betänkande av Göteborgskommittén,” 2002, inSwedish.
[5] Gangs Using Jammers to Deactivate Alarms, JohnMooney, Sunday Times Apr. 25, 2010.
[6] ETSI EN 300 392-2 v3.2.1.[7] P. Stenumgaard, L. Junholm, and K Wiklundh, “GENESIS
— A Software-Based Research Platform for Intersystem-Interference Analyses on e.g. Camps,” Proc. MCC 2009,NATO Military Commun. and Info. Systems Conf.,Prague, Czech Republic — Sept., 29–30, 2009.
[8] J. Winters, “Optimum Combining in Digital MobileRadio with Cochannel Interference,” IEEE JSAC, vol. 2,no. 4, July 1984, pp. 528–39.
[9] Y. Zeng and Y-C. Liang, “Eigenvalue-based SpectrumSensing Algorithms for Cognitive Radio,” IEEE Trans.Commun., vol. 57, no. 6, June 2009, pp. 1784–93.
[10] M. Wax, and T. Kailath, “Detection of Signals by Infor-mation Theoretic Criteria,” IEEE Trans. Acoustics,Speech, and Sig. Proc., vol. 33, no. 2, Apr. 1985, pp.387–92.
BIOGRAPHIESPETER STENUMGAARD ([email protected]) is an adjunctProfessor at the Division for Communication Systems in theDepartment of Electrical Engineering (ISY) at Linkoping Uni-versity (LiU) in Linkoping. He joined LiU in March 2011. Hereceived the Ph.D. degree in radio communications from theRoyal Institute of Technology, Stockholm in 2001. Until 1995he was a systems development engineer at Saab Military Air-craft, Linköping, where he worked with electromagneticcompatibility issues in aircraft design. Prof. Stenumgaard iscurrently the Research Director in robust wireless communi-cations at the Swedish Defence Research Agency (FOI) inLinköping, Sweden. During 2006–2012 he was an adjunctprofessor at the Center for Radio Measurement Technologyat the University of Gävle, Sweden. He is also the Director ofthe graduate school Forum Securitatis within public safety &security at Linköping University.
DANIEL PERSSON received the Ph.D. degree in Electrical Engi-neering from Chalmers University, Göteborg, Sweden, in2009. For his Ph.D., he worked on problems in joint source-channel coding, with speech and video applications. From2009 until 2011 he was employed as a postdoctoralresearcher within the Communication Systems Division ofthe Department of Electrical Engineering, Linköping Universi-ty, Sweden. His research was focused on efficient demodula-tion algorithms for multiple-antenna systems. Since 2011, heis an assistant professor within the same department and hismain research is focused on robust wireless communicationsfor the governmental strategic research center Security Link.
KIA WIKLUNDH has an M.Sc. degree in Electrical Engineeringfrom Linköping University of Technology, Sweden. Since that,she has been employed by Swedish Defence Research Agency(FOI). She received her PhD from Chalmers University of Tech-nology, Sweden, in 2007, within the topic of intersysteminterference. She has worked as a project manager for severalprojects in the area of intersystem interference and tacticalcommunication systems for operations in urban environment,for both civilian and military customer. Between 2007 and2008, she was the Deputy Head of the Department of Radioand Communication Systems. Since 2007, she is a deputyresearch director at FOI. She is a member of IEEE and she hasreceived best paper award at three scientific conferences.
ERIK G LARSSON is a professor and head of the Division forCommunication Systems in the Department of ElectricalEngineering at Linköping University, Sweden. His main pro-fessional interests are wireless communications and signalprocessing. He has published approximately 70 journalpapers on these topics, is coauthor of the textbook Space-Time Block Coding for Wireless Communications (Cam-bridge University Press, 2003), and has ten patents onwireless technology. He is currently an associate editor ofIEEE Transactions on Communications.
We have shown by
an example that the
width of the transi-
tion region for the
shift from good
communication qual-
ity to disruption can
be widened from
2 meters to
10 meters when
the early warning
service is used.
STENUMGAARD LAYOUT_Layout 1 4/29/13 1:12 PM Page 192