an extensible architecture for avionics sensor …...your systems. working as one. an extensible...
TRANSCRIPT
Your systems. Working as one.
An Extensible Architecture for Avionics Sensor Health Assessment Using DDS
Sumant Tambe, Ph.D.
Senior Software Research Engineer
Real-Time Innovations, Inc.
12/3/2013
Infotech@Aerospace 19 - 22 August 2013 Boston, Massachusetts
Acknowledgement: This research is funded by the Air Force Research Laboratory, WPAFB, Dayton, OH under Small Business Innovation Research (SBIR) contract # FA8650-11-C-1054. Manuscript approved for publication by WPAFB: PA Approval Number: 88ABW-2013-3209.

12/3/2013 © 2012 RTI • COMPANY CONFIDENTIAL 2
NASA K10 Rover: Surface Telerobotics
Uses RTI Connext DDS

Why NASA Uses RTI Connext DDS
• NASA was looking for a software architecture and communications infrastructure that enabled reliable, standards-based messaging between the International Space Station and Earth.
• NASA relied on the RTI Connext DDS solution because of its ability to tolerate time delay and loss of signal.
• A common, flexible, interoperable data communications interface that would readily integrate across each robot’s disparate applications and operating systems.
12/3/2013 © 2013 Real-time Innovations, Inc. 3

Data-Centric Architecture of DDS
12/3/2013 4
Airborne Sensor
DataWriter DataReader
DataReader
DataReader
DDS Global Data Space
Airborne Sensor
DataWriter
Airborne Sensor
DataWriter
Sensor Health Assessment
Sensor ID Velocity X Velocity Y
0x1 12.35 35.45
0x2 1.34 6.78
ID Pitch Roll Yaw
0x3 10 35.5 -45
0x4 10.1 35.5 -30
publish
publish
publish
subscribe
subscribe
subscribe
© 2013 Real-time Innovations, Inc.
Research: Cyber Situational Awareness
• Research is funded by the Air Force Research Laboratory, WPAFB, Dayton, OH
12/3/2013 5 © 2013 Real-time Innovations, Inc.

Context: Cyber Situational Awareness
12/3/2013 6
• Enterprise Security Situational Awareness
• Sensor Health Management
Security Situational
Awareness
Sensor Health Management
Goal Situation (Attack) recognition, comprehension,
projection
Fault Detection, Isolation, Mitigation
Sensors E.g., Host-based and network intrusion detection
systems (OSSEC, Snort, Ganglia), malware
detectors, firewalls, operating system, etc.
E.g., Accelerometer, fuel-flow sensors, altimeter,
speedometer, etc.
Input to
Analysis
Events and Alerts: log analysis, file integrity
checking, policy monitoring, rootkit detection, real-
time alerting and active response
Sensor readings, software status signals, software
quality signals, operating system information
Analysis
Techniques
Complex Event Processing, Classification (Naïve
Bayes, SVM, linear classifiers), clustering (K-
means), pattern matching etc.
Bayesian Networks, Hybrid Bayesian, Timed Fault
Propagation Graphs (TFPG),
Tools/Librari
es
R, Weka Smile and Genie
Visualization Histograms, heat maps, time series Time series
© 2013 Real-time Innovations, Inc.

Sensor Health Management
12/3/2013 7 © 2013 Real-time Innovations, Inc.

Cyber Health Analysis of Airborne Sensors
Engine
Mechanical
Propulsion Electrical Navigation
Payload
Comms
STANAG 4586 Message #1101: Subsystem Status Report 0 = No Status; 1 = Nominal; 2 = Caution; 3 = Warning; 4 = Emergency; 5 = Failed
(formerly Predator B)

12/3/2013 9
DDS
EngineOperatingStates
Sensor Health Analysis using
Bayesian Network
Simulated UAV Engine Data (STANAG 4586)
Orientation Sensor (IMU)
BeagleBone
Pitch/Roll/Yaw updates over TTL UART1
Bayesian Network
Visualization Sensor Health Estimates
Smile library
Simulated MQ-9 Reaper UAV
Hardware-in-the-loop Simulation
© 2013 Real-time Innovations, Inc.
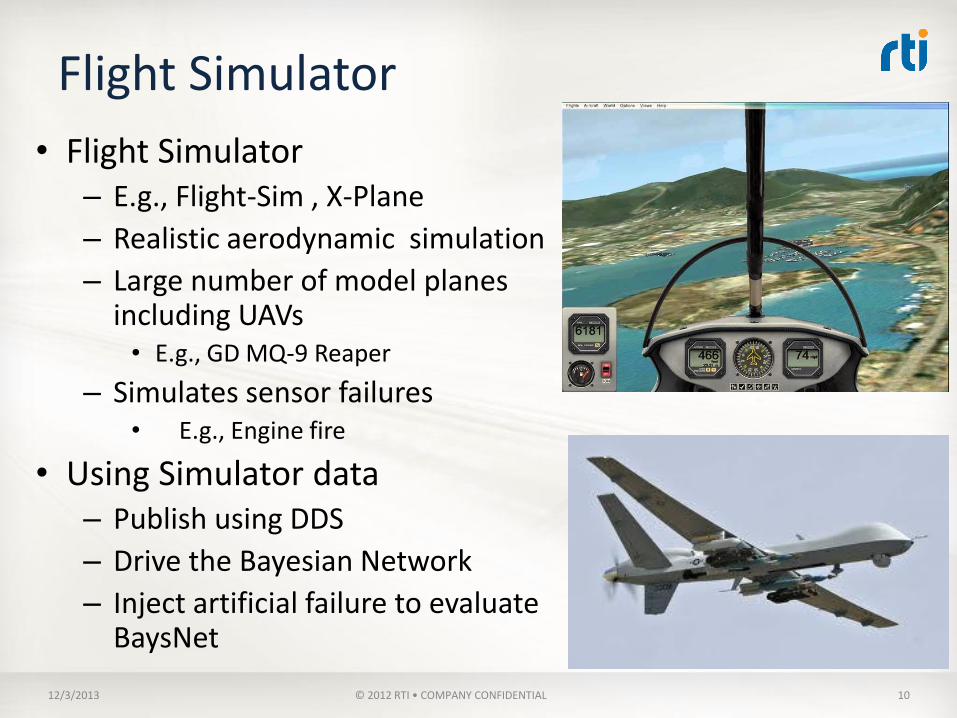
Flight Simulator
• Flight Simulator – E.g., Flight-Sim , X-Plane
– Realistic aerodynamic simulation
– Large number of model planes including UAVs • E.g., GD MQ-9 Reaper
– Simulates sensor failures • E.g., Engine fire
• Using Simulator data – Publish using DDS
– Drive the Bayesian Network
– Inject artificial failure to evaluate BaysNet
12/3/2013 © 2012 RTI • COMPANY CONFIDENTIAL 10

Hardware-in-the-loop Simulation using Orientation Sensors
• Hardware Description – Beaglebone Rev A5 (700 MHz,
256 MB RAM)
– CHR-6dm AHRS Orientation Sensor
– Communication over TTL (3.3V) UART at 115200 Baud
– Onboard Extended Kalman Filter (EKF) produces yaw, pitch, and roll angle estimates
12/3/2013 11
BeagleBone with CHR-6dm (above) CHR-6dm orientation Sensor (below)
© 2013 Real-time Innovations, Inc.

Sensor Health Analysis Using Bayesian Networks
• Bayesian Network based on STANAG 4586
• Sensor dependencies are modeled as an acyclic graphs
• Can learn the structure and parameters from raw data
• Each node has a probability distribution function with respect to its parents
• Raw values of sensor readings are discretized and plugged in
• Health nodes (H_*) give instantaneous probability of sensor being faulty – A real value between 0 to 1
– A value above or below a threshold trigger an alert
12/3/2013 12
Health Nodes Sensor Nodes
© 2013 Real-time Innovations, Inc.

IMU-in-the-loop Simulation (Failure Scenarios)
12/3/2013 13
Replay Starts [0:00]
Engine Catches Fire
[0:57]
Very Low Engine Thrust [1:30] Replay Ends [5:00]
Sub-Scenario #2 Very Low Engine Thrust @ [1:30]
Replay Starts [0:00]
Replay Ends
[5:00]
Sub-Scenario #1 High Engine Thrust
1
2
(Change Pitch and Roll Physically)
(Change Pitch and Roll Physically)
© 2013 Real-time Innovations, Inc.

Extensibility Facilitates System Evolution
12/3/2013 14
struct EngineOperatingStatesSensorsHealth {
double p_engineSpeedSensor_good;
double p_engineSpeedSensor_bad;
double p_exhaustGasTempSensor_good;
double p_exhaustGasTempSensor_bad;
double p_fireDetectionSensor_good;
double p_fireDetectionSensor_bad;
. . .
};// Extensibility(EXTENSIBLE)
struct EngineOperatingStates {
double timestamp;
string vehicleId; //@key
long engineStatus;
double engineSpeed;
double enginePower;
double exhaustGasTemperature;
double engineBodyTemperature;
double outputPower;
long fireDetectionSensor;
};// Extensibility(EXTENSIBLE)
• Evolution – Hardware evolves Software evolves Data-types evolve
– Evolved system components must continue to communicate with unevolved components
– E.g., 2d point (X, Y) evolves to 3d point (X, Y, Z)
– New radar that produces 3d points must work with old display that expects 2d
• Solution: OMG Extensible and Dynamic Topic Types Specification
© 2013 Real-time Innovations, Inc.

Take Home Points
• Bayesian Networks – A flexible and capable platform for fault
detection and diagnosis – Fine-grain fault detection within a
subsystem and across subsystems – Large number of COTS tools
• RTI Connext DDS – Has small footprint
• Runs on a ARM processors (700 MHz, 256MB RAM)
– Has low latency • Supports hardware-in-the-loop simulation
as well as Smart Systems
– Standards-based support for system evolution
12/3/2013 15 © 2013 Real-time Innovations, Inc.

Future Work
1. Expanded Cyber Situational Awareness – Using independent ground-based
sensors
2. Integrate portable and truly interoperable airborne software components – Use RTI Transport Services Segment
(TSS) implementation
3. Semantic Interoperability – Use UAS Control Segment (UCS)
– Protocol Interoperability using DDS (RTPS)
12/3/2013 16 © 2013 Real-time Innovations, Inc.

Thank You!
12/3/2013 17 © 2013 Real-time Innovations, Inc.