an introduction to the kinematics of mechanismsscoros/cs15869-s15/lectures/10-kinematics.pdf–...
TRANSCRIPT
An Introduction to the Kinematics of Mechanisms
Stelian Coros

Timeline for the remainder of the course
April 9 14 16 21 23 28 30
No classes
Project one-on-”one” meetings
Last Lecture
Final Project Presentations

Beyond static objects…
• We need models of motion
– We’ve already seen the Finite Element Method
– In principle, can be applied to all types of solid objects -
everything deforms!
– But, computationally very demanding
• Reduced models
– Rigid Bodies
• model for the motion itself (Kinematics)
• model which includes the causes of the motion (Dynamics)

Mechanisms are ubiquitous
Kinematics of Mechanisms
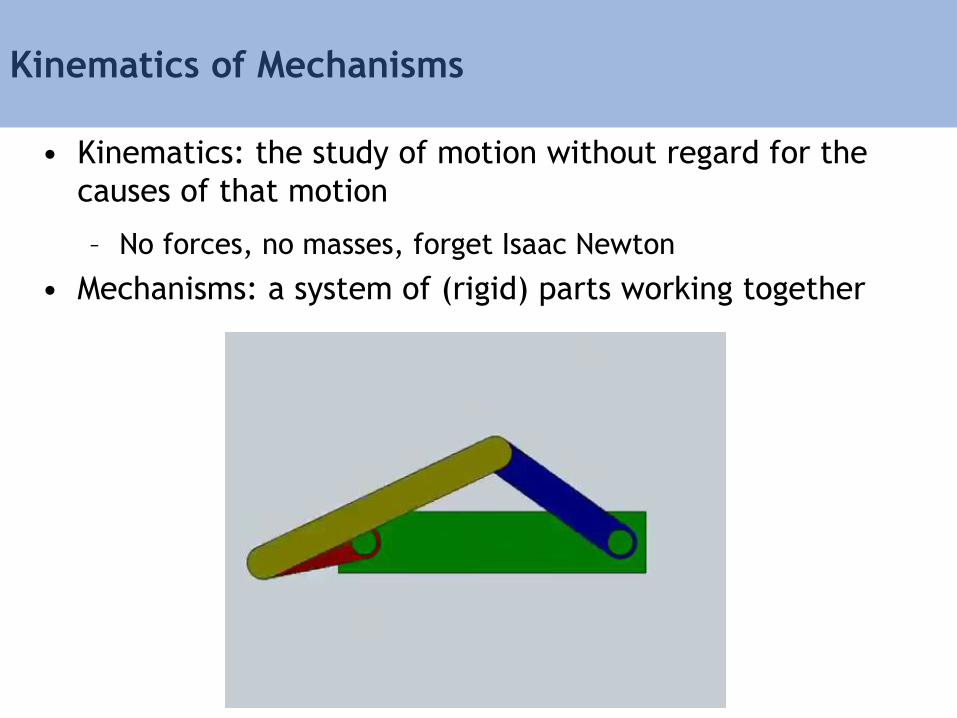
• Kinematics: the study of motion without regard for the
causes of that motion
– No forces, no masses, forget Isaac Newton
• Mechanisms: a system of (rigid) parts working together
The Structure of Mechanisms
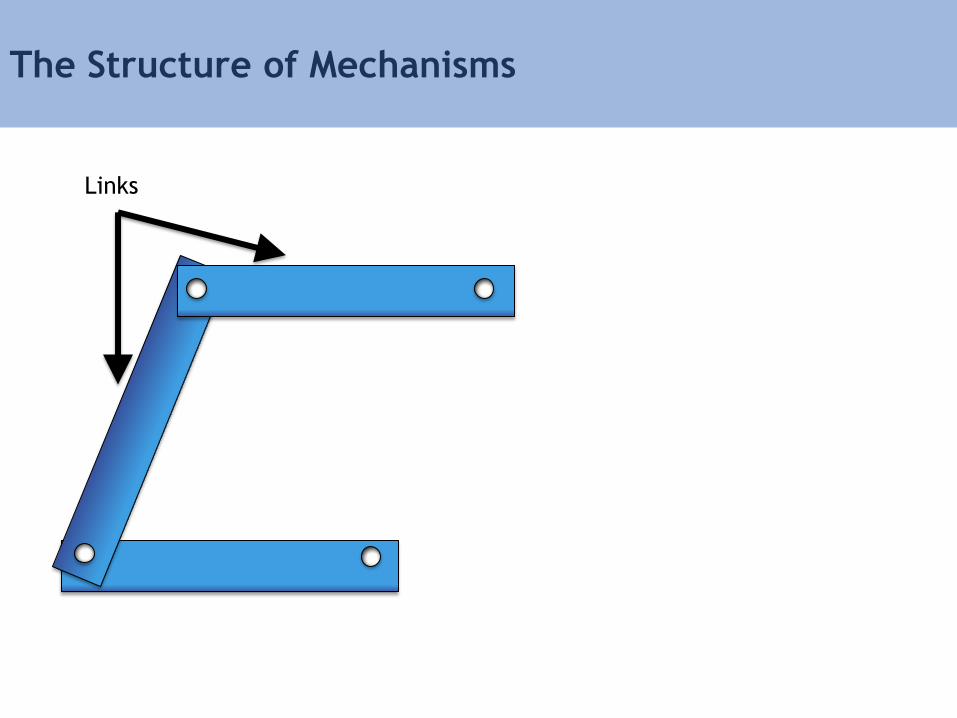
The Structure of Mechanisms
Links
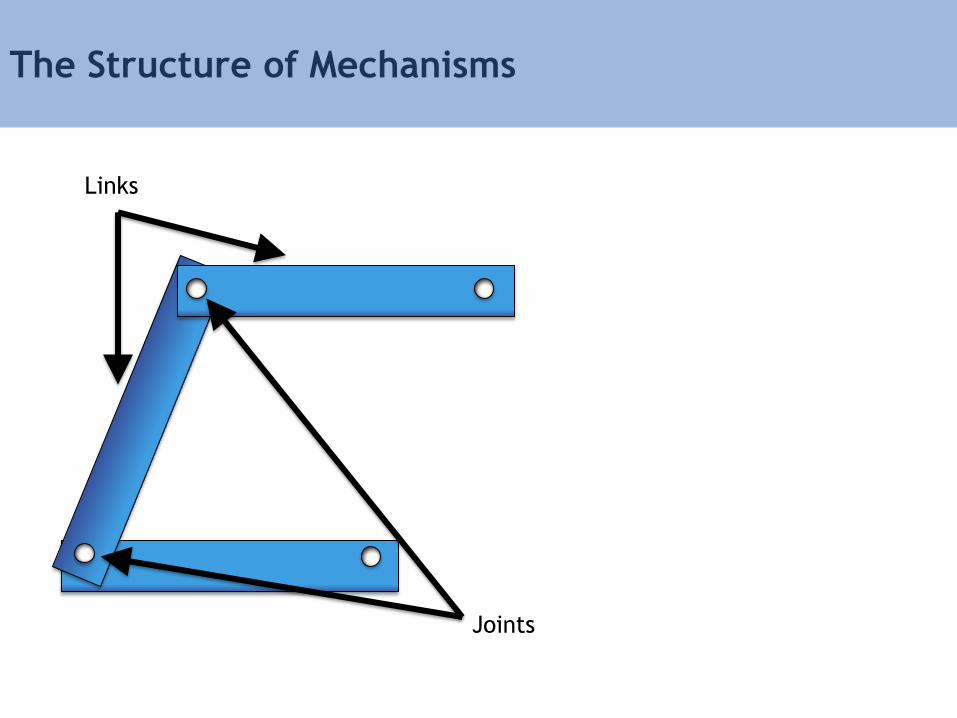
Links
The Structure of Mechanisms
Joints

Modeling a Mechanisms
• We describe the configuration of a mechanism using
configuration (or state) variables: s
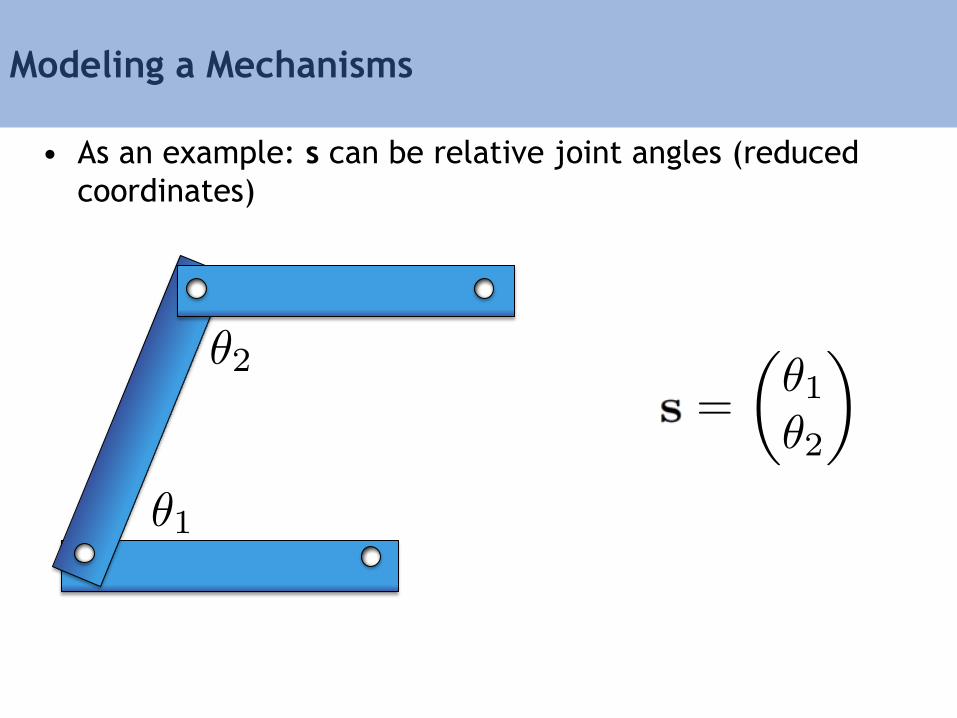
Modeling a Mechanisms
• As an example: s can be relative joint angles (reduced
coordinates)
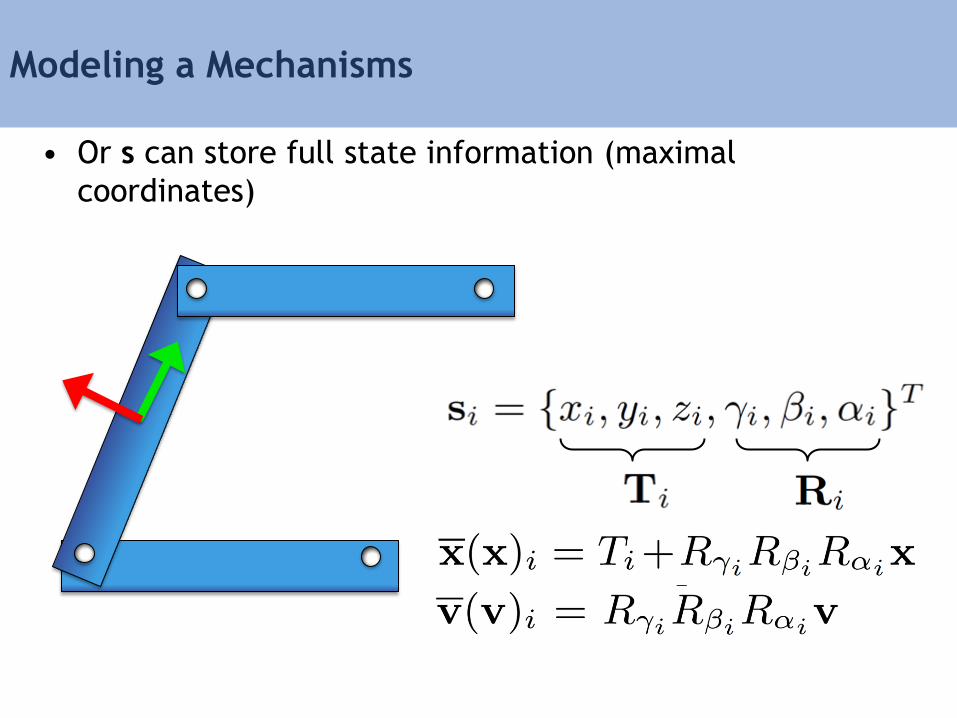
Modeling a Mechanisms
• Or s can store full state information (maximal
coordinates)
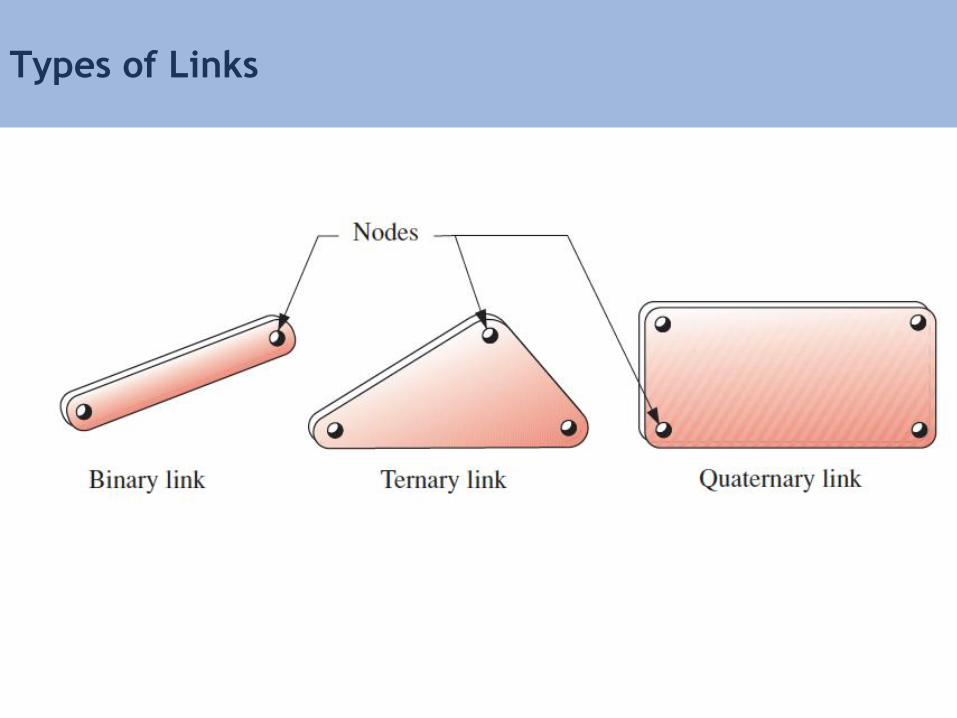
Types of Links
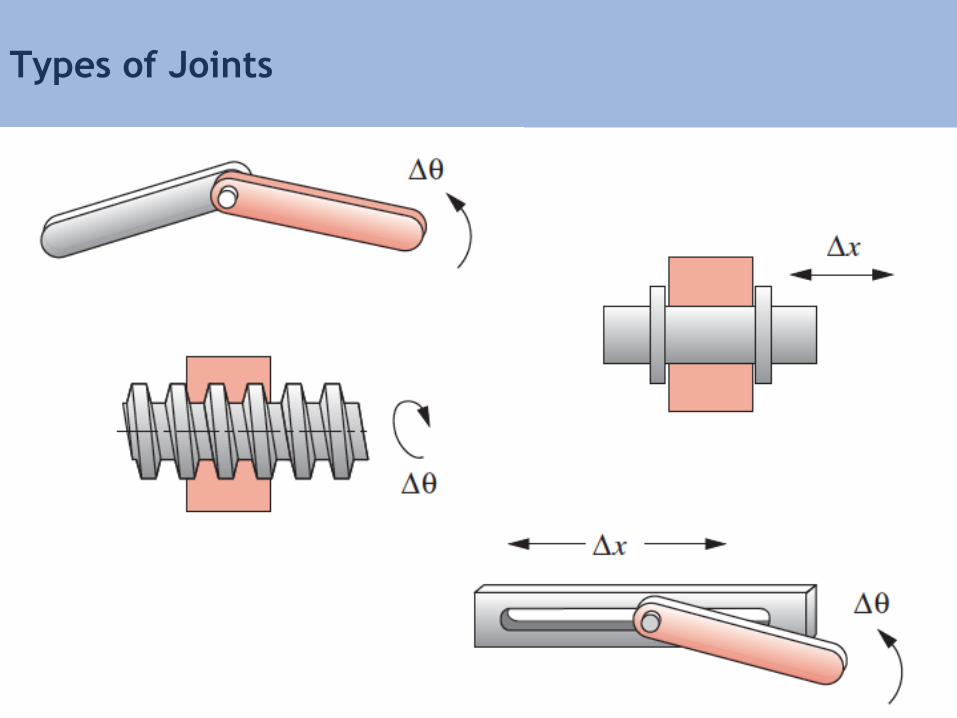
Types of Joints

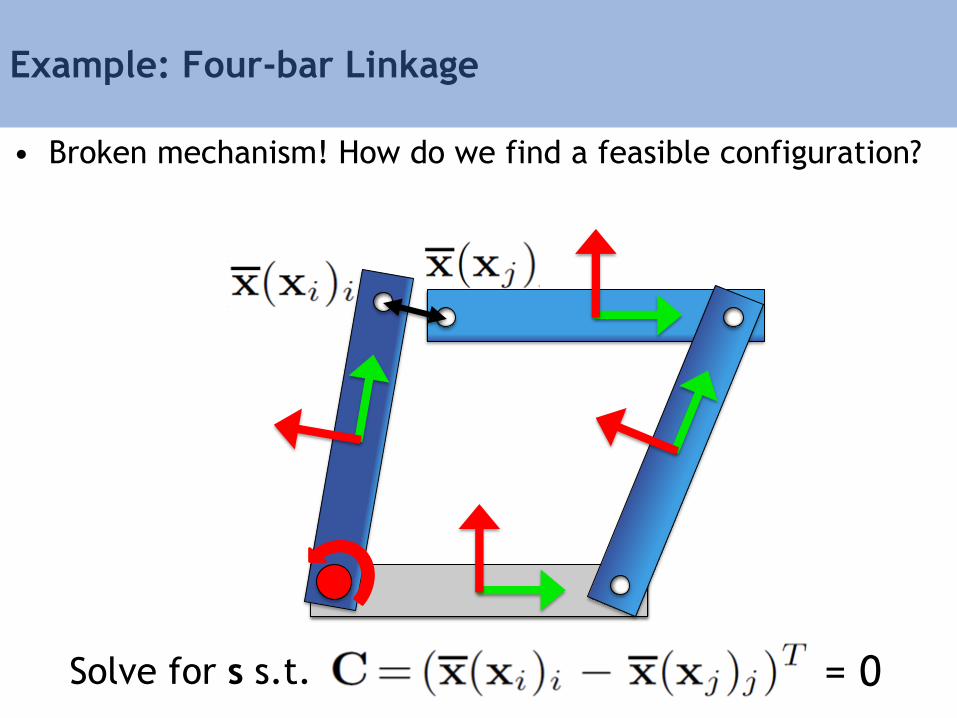
Example: Four-bar Linkage
• Constraints vs DOFs

Example: Four-bar Linkage
• Motor controls configuration of entire mechanism
Example: Four-bar Linkage
• Broken mechanism! How do we find a feasible configuration?
= 0 Solve for s s.t.
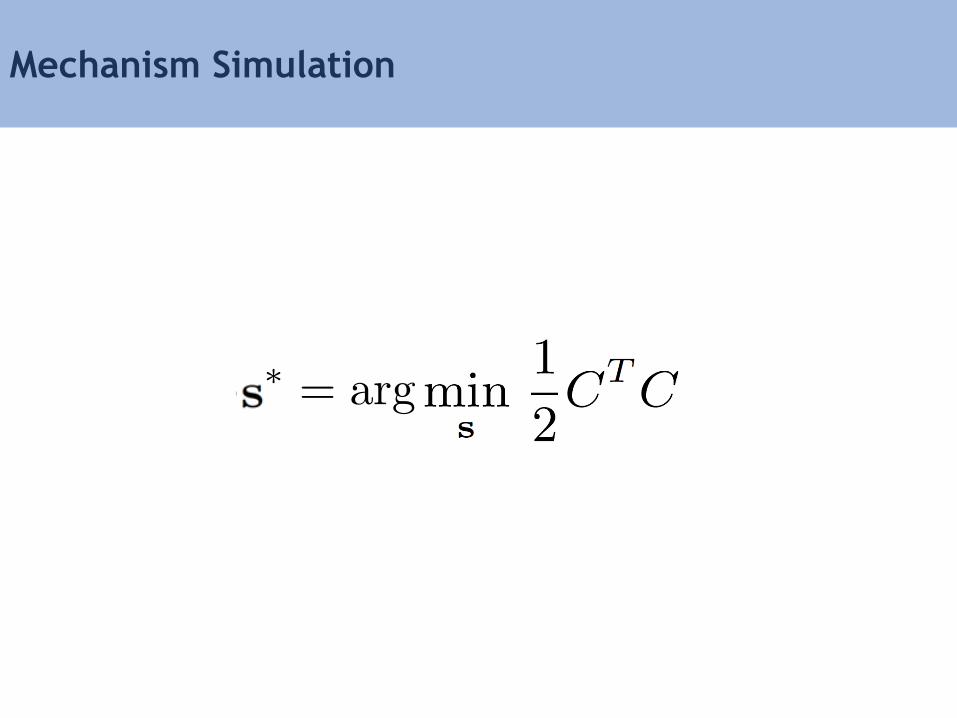
Mechanism Simulation
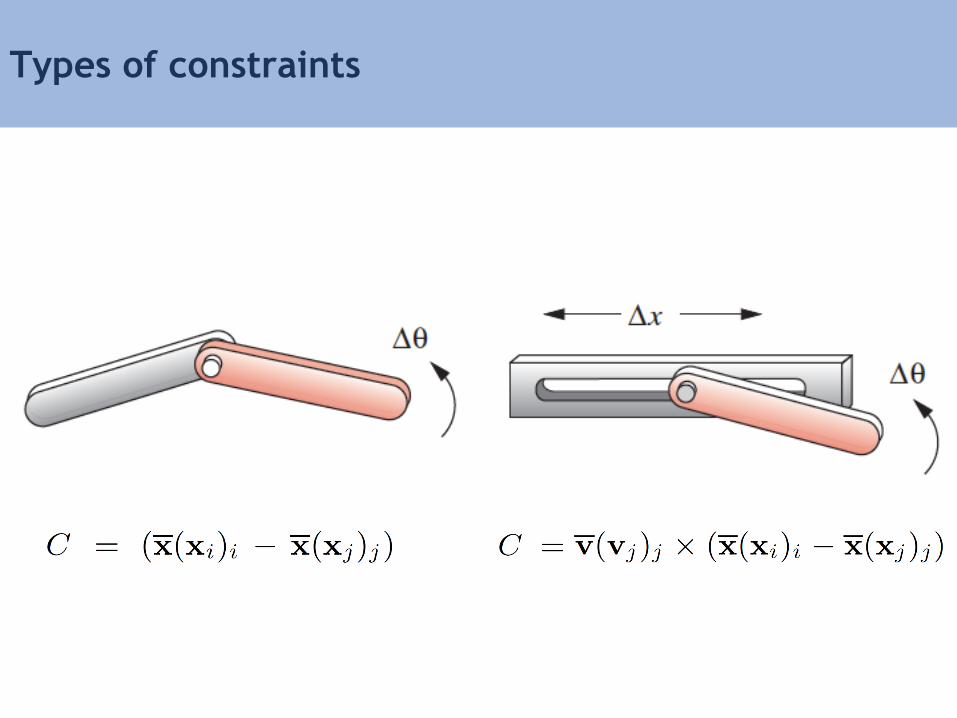
Types of constraints
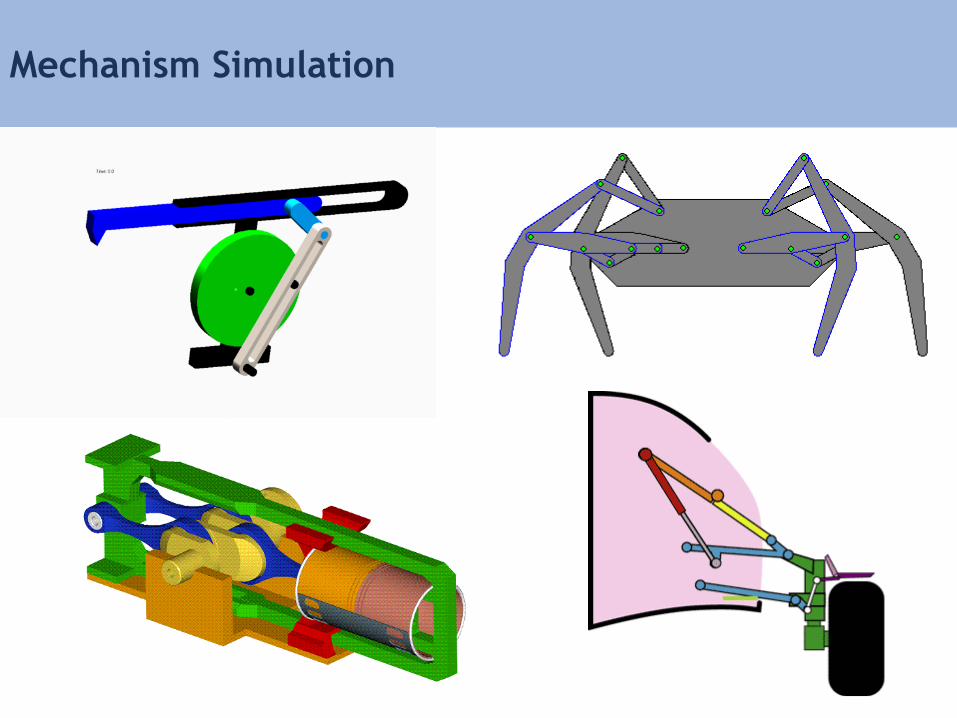
Mechanism Simulation
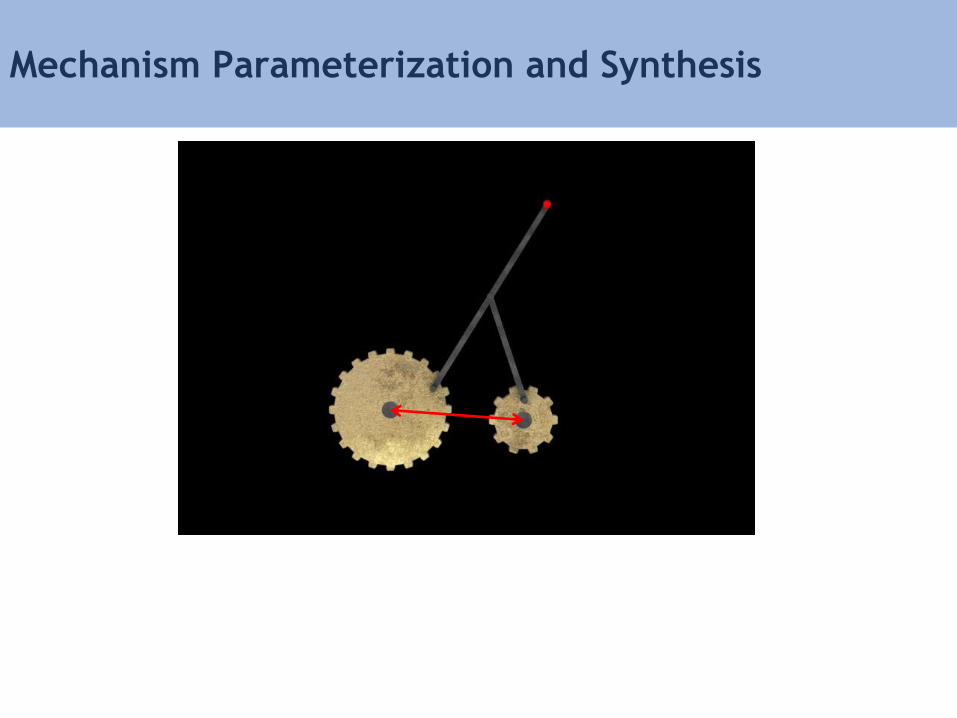
Mechanism Parameterization and Synthesis

Mechanism Parameterization and Synthesis
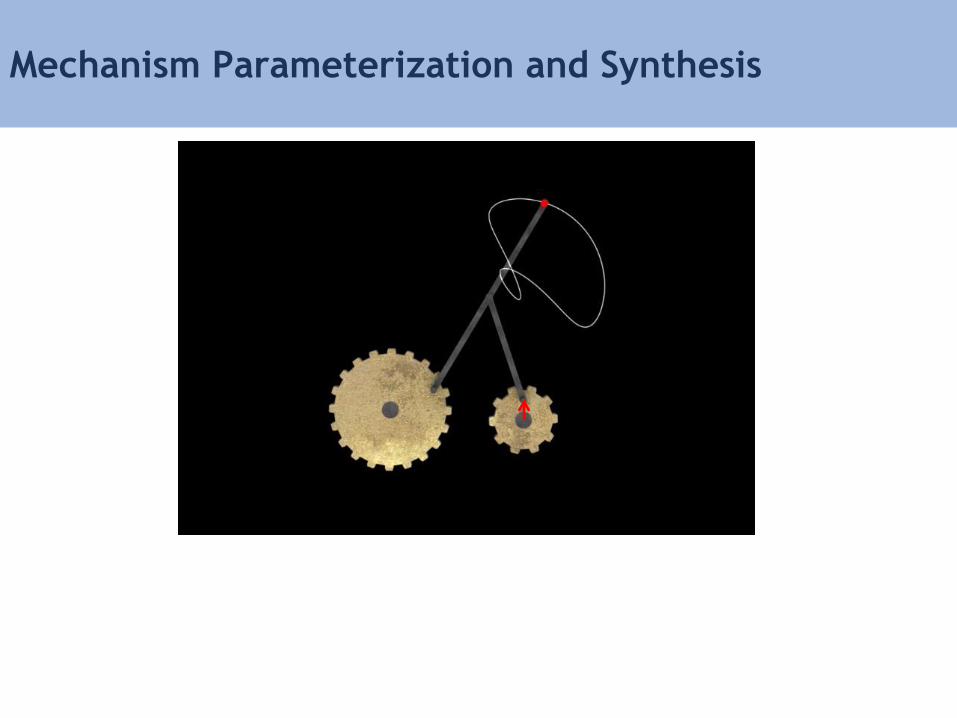
Mechanism Parameterization and Synthesis
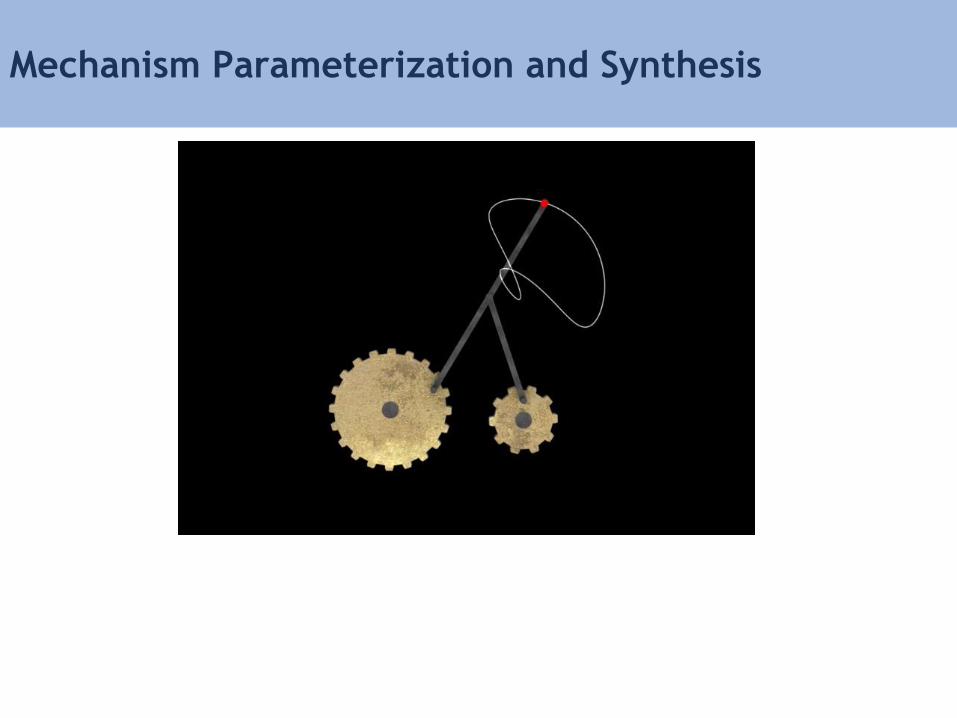
Mechanism Parameterization and Synthesis

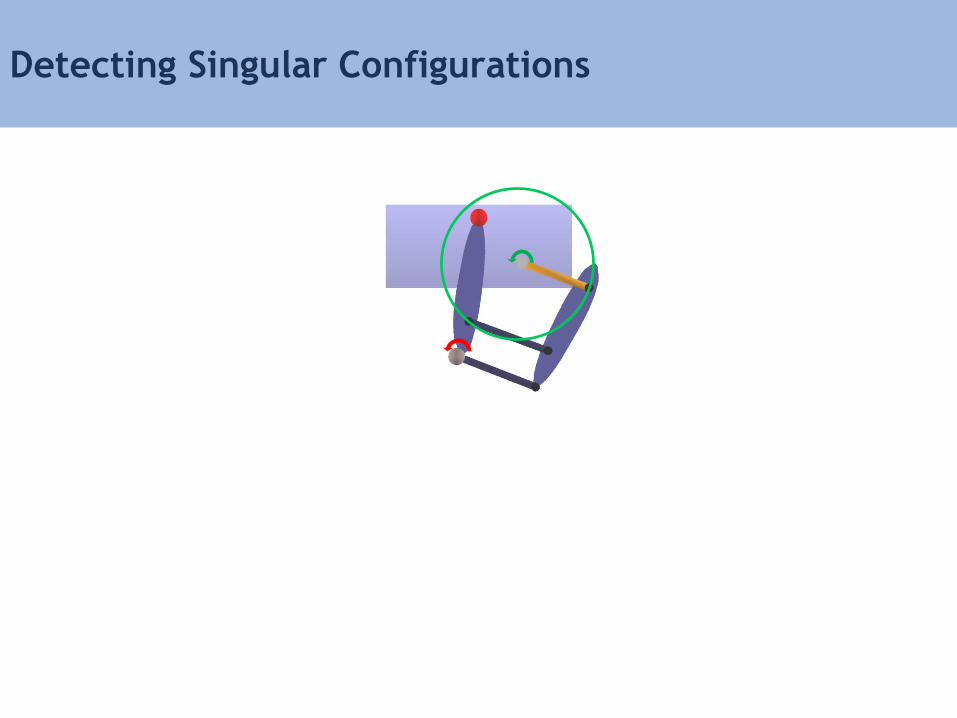
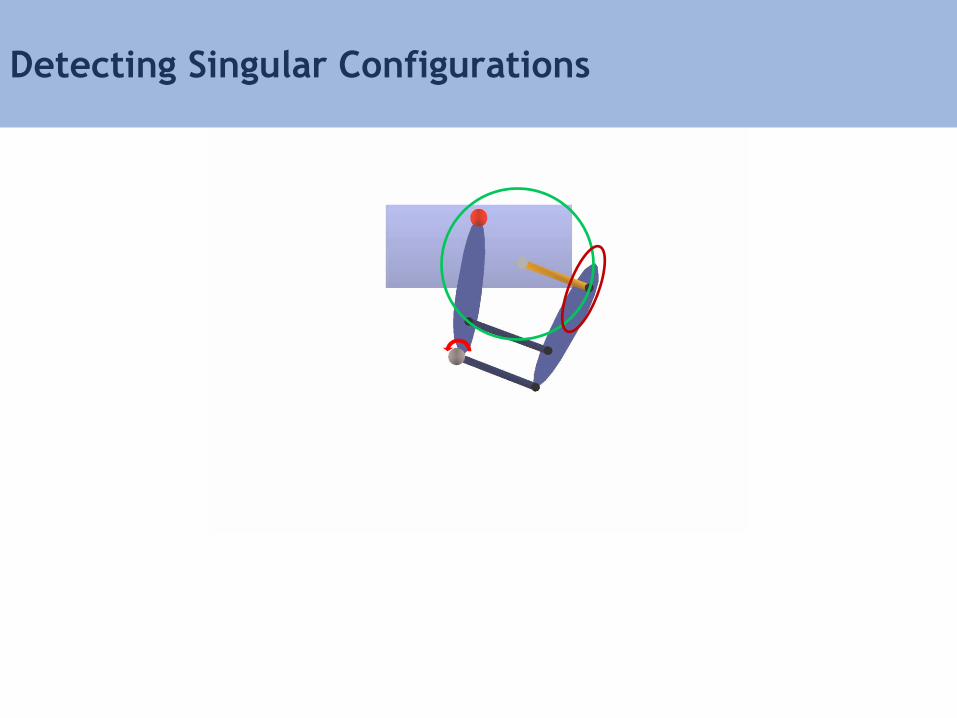
Detecting Singular Configurations

Detecting Singular Configurations

Detecting Singular Configurations

Detecting Singular Configurations
Detecting Singular Configurations
Detecting Singular Configurations
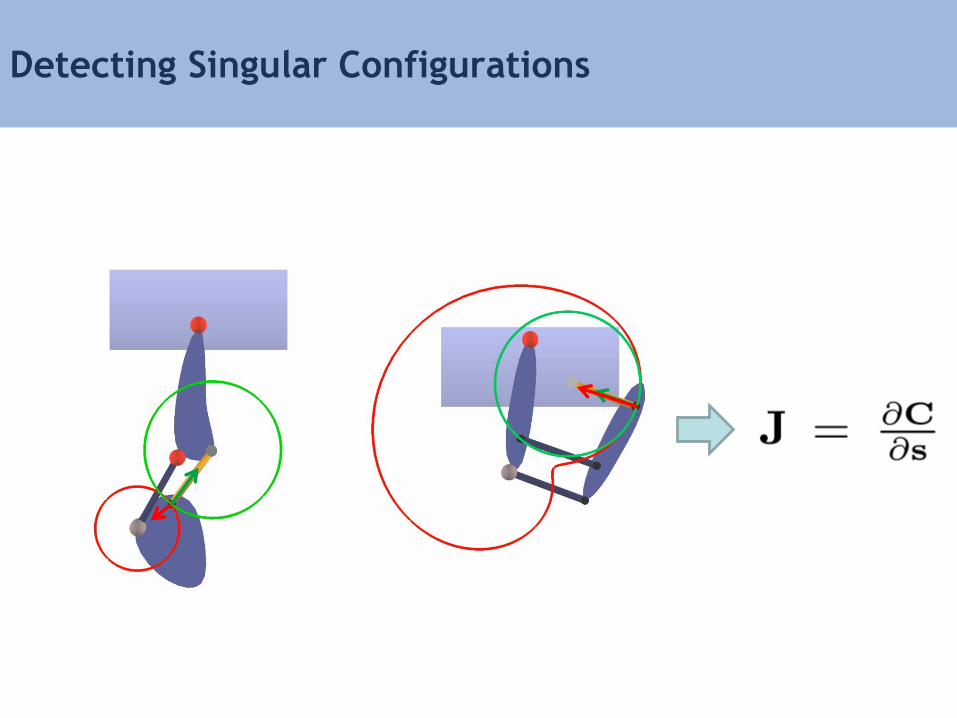
Detecting Singular Configurations
Mechanism Synthesis Example

Assignment 4
• Build a mechanism out of 2D rigid bodies
• Use Rigid Bodies + Constraints
• You’ll 3D print or laser cut your mechanism
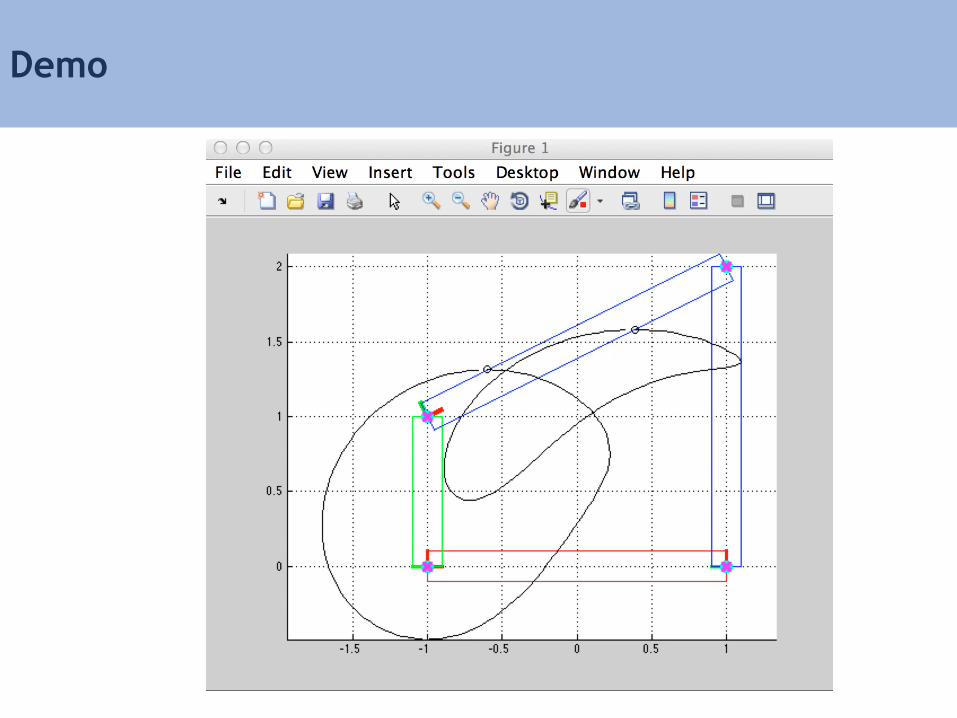
Demo
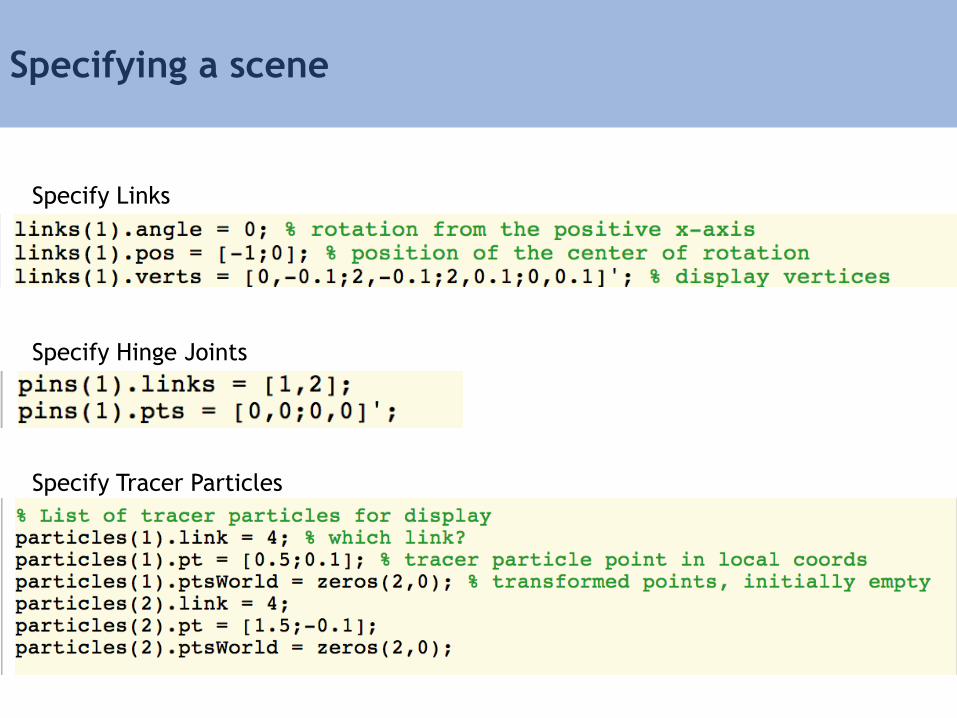
Specifying a scene
Specify Links
Specify Hinge Joints
Specify Tracer Particles

Solving the least squares problem
Distances between
constrained points
Set positions of mechanism

You can build things like this
http://www.youtube.com/watch?v=p__-QbQbntI
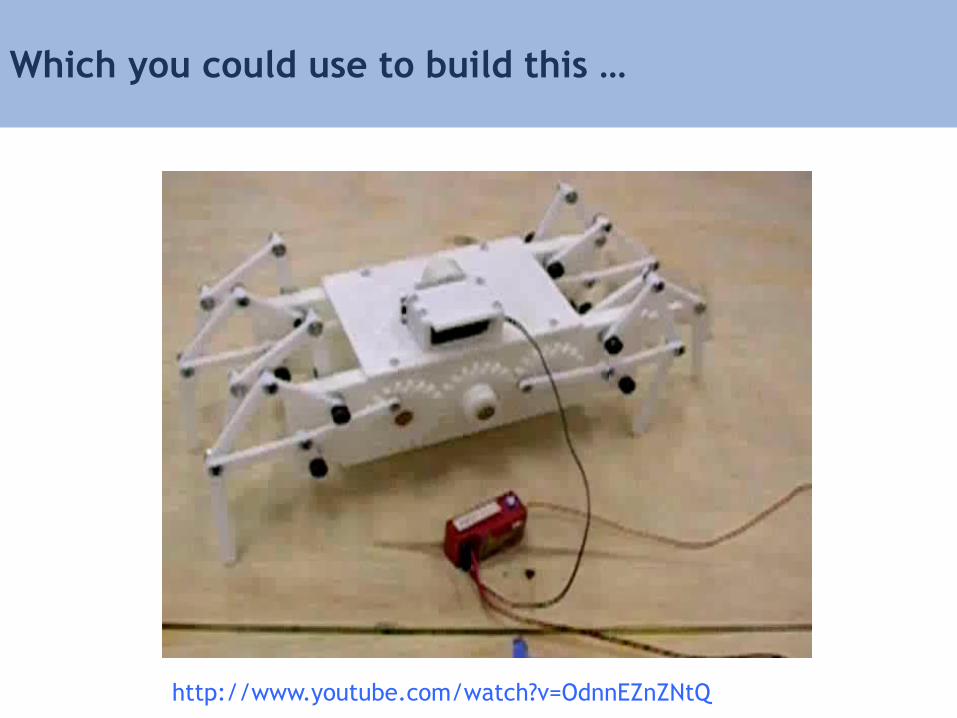
Which you could use to build this …
http://www.youtube.com/watch?v=OdnnEZnZNtQ

Timeline for the remainder of the course
April 9 14 16 21 23 28 30
No classes
Project one-on-”one” meetings
Last Lecture
Final Project Presentations