an investigation of a flat plate oscillating heat pipe …
TRANSCRIPT

AN INVESTIGATION OF A FLAT PLATE OSCILLATING HEAT PIPE AS A THERMAL SPREADER WITH CENTERED HEATING
A Thesis Presented to the Graduate School
University of Missouri-Columbia
In Partial Fulfillment of the Requirements for the Degree:
Master of Science
Author:
AARON T. JOHNSON
Dr. Hongbin Ma, Thesis Supervisor
May 2015
The undersigned, appointed by the Dean of the Graduate School, have examined the thesis
entitled
AN INVESTIGATION OF A FLAT PLATE OSCILLATING HEAT PIPE AS A THERMAL SPREADER WITH CENTERED HEATING
Presented by Aaron T. Johnson
A candidate for the degree of Master of Science
And hereby certify that in their opinion it is worthy of acceptance.
_____________________________________ Hongbin Ma
_____________________________________ Yuwen Zhang
____________________________________Stephen Montgomery-Smith

ii
Acknowledgements
I must thank my mother and father for this achievement: Mom for showing me
that I must always pursue a goal and Dad for showing me that there is always a process
that will attain the goal. Without their combined guidance, I never would have made it as
far as I have.
I also thank Dr. Ma for putting up with me, as I know I was not always the easiest
student to deal with. I also thank him for giving me an understanding of heat pipes and
thermal engineering that I imagine few will be able to rival as I head into industry.
I must also acknowledge the contributions of others to this work. Scott
Thompson, Aaron Hathaway, Hanwen Lu, Fritz Laun, and Corey Wilson all were
instrumental in me being able start, set up, and finish this investigation. Without their
continued patience and advice, it would have been far more difficult to achieve.

iii
Table of Contents
Acknowledgements…….….……….…………………………………………………..….ii
List of Figures…….….……………….………………………………………………..…iv
List of Tables………….…….………………...…………………….……………………vi
Nomenclature…………………………………..………………………….…………….vii
Abstract………...……..…………………….………………………………………….…xi
Chapter 1: Introduction and Literature Review……………………...……………….…...1
Chapter 2: Mathematical Model..........................................................................................9
2.1 Approach………………………………………………………………………9
2.2 Continued Approach with Application………………………………...…….17
Chapter 3…………………………………………………………………………………23
3.1 Experimental Setup………………………………………………………….23
3.2 Procedure……………………………………………………………….…...30
3.3 Uncertainty Analysis………………………………………………………..31
Chapter 4: Results and Discussion……………………………………………………….34
Chapter 5: Conclusion………………………………………………….………………..45
References…………………………………………………………………………….….46
Appendix A: Presented Graphs of all steady state temperature distributions...…………47
Appendix B: Matlab Code used for Computation………………...…………………….60
Appendix C: Uncertainty Equations Presented in order of calculation………………....65
iv
List of Figures
Figure 1.1 Basic depiction of an oscillating heat pipe, axial configuration.
Figure 1.2 Basic depiction of an oscillating heat pipe, spreader configuration.
Figure 2.1 Basic depiction of the thermal resistance network.
Figure 2.2 Schematic of heat spreader embedded with flat plate oscillating heat pipe.
Figure 2.3 Thermal resistance varied against the thermal conductivity while h is held constant at 150 W/m^2 K
Figure 2.4 Convection Coefficient varied while holding k constant at 1000 W/m^2 K.
Figure 2.5 Initial computed results plotted. Predictions indicate reasonable values of surface temperature T.
Figure 3.1 Drawing of the actual heat pipe
Figure 3.2 Photo of the heat pipe, pre brazing.
Figure 3.3 Photo of experimental setup.
Figure 3.4 Topside view of setup showing flow pattern and thermocouple
Figure 3.6: Block diagram of experimental setup.
Figure 4.1: Graph taken from Thompson et al. [10] showing experimentally obtained values.
Figure 4.2: Graph of calculated or predicted surface temperatures of the heatpipe/heat sink for experiment 2
Figure 4.3: Graph of calculated or predicted surface temperatures of copper substrate/heat sink for experiment 2.
Figure 4.4 Graph of calculated and experimental surface temperatures 1 m/s for experiment 3.
Figure 4.5 Graph of calculated and experimental surface temperatures 2 m/s for experiment 3.
Figure 4.6 Graph of calculated and experimental surface temperatures 3 m/s for experiment 3.

v
Figure 4.7 Graph of 9 thermocouples at 225 W and 3 m/s showing S.S. temperature distribution
Figure 4.8 Graph of 9 thermocouples at 100 W and 2 m/s showing S.S. temperature distribution

vi
List of Tables
Table 3.1 List of Equipment shown in Photograph
Table 4.1 Calculated and Experimental Thermal Resistances for Experiment 1
Table 4.2 Calculated and Experimental Thermal Resistances for heat pipe Experiment 2
Table 4.3 Calculated and Experimental Thermal Resistances for copper substrate Experiment 2
Table 4.4 Calculated and Experimental Thermal Resistances for Experiment 3
vii
Nomenclature
A = Area (m2)
a = Length of base in x-direction (m)
B = Bias Uncertainty
b = Width of base in y-direction (m)
Biot∙ 𝜏 = Dimensionless product of Biot number and τ
Bo = Bond number
C = Constant used to calculate Reynold’s number
c = Specific heat capacity (J/kg K)
D = Diameter (m)
g = Acceleration of gravity (m/s2)
H = Height of fin (m)
h = Convection coefficient (Watts/m2 K)
I = Input Current (Watts)
J = Input Voltage (volts)
k = Conduction coefficient (Watts/m K)
= Mass flow rate (kg/s)
N = Number of fins

viii
𝑁𝑢 𝐷 = Nusselt number
P = Perimeter (m)
p = Substrate aspect ratio
Pr = Dimensionless Prandtl number
Q = Heat input (Watts)
R = Resistance (°C/Watt)
𝑅𝑒𝐷 = Reynold’s number
T = Temperature (°C)
t = Thickness of plate (m)
U = Total combined bias and precision uncertainty
u = Uncertainty
V = Velocity (m/s)
W = Precision uncertainty
z = standard deviation
Greek Symbols
α = Dimensionless source width
β = Dimensionless source length
δ = Dirac delta function
μ = Kinematic viscosity (m2/s)

ix
ρ = Density (kg/m3)
σ = Surface tension (N/m)
τ = Dimensionless plate thickness
φ = Fourier coefficients for heat source
Ψ = Thermal resistance (°C/Watt)
ψ = Fourier coefficients for temperature distribution
Subscripts
c = Condenser
e = Evaporator
eff = Effective
f = Fin
l = Summation index
liq = Liquid
m = Summation index
sp = Spreading
T = Temperature
t = total
u = Sum of conductive and convective

x
vap = Vapor
∞ = Ambient
xi
Abstract
As current electronics technology advances and becomes miniaturized, heat
production, and thus heat removal, becomes more complicated. One approach being
researched that shows much promise is a flat plate oscillating heat pipe. Flat Plate
Oscillating Heat Pipes (Pulsating heat pipes) have been researched since being patented
in 1990. Two types have been designated as either closed or open loop. Flat Plate
Oscillating heat pipes are a closed loop design. Simple knowledge such as the thermal
resistance and thermal conductivity of these devices are usually well documented.
Primarily, investigations have been done on an axial basis. The purpose of this
investigation was the use of a flat plate oscillating heat pipe as a thermal spreader in
horizontal orientation with centered bottom heating mode. Additionally, the existing
mathematical models for flat plate oscillating heat pipes are complex and seek to describe
how the heat pipe functions internally. A new approach from an external perspective is
used. The new approach is to calculate thermal and spreading resistance. From the
calculated resistance, the average temperature distribution on the heat removal surface is
predicted. Assumptions need to be made in order to use this approach, including a k value
and heat removal conditions. Existing and new experimental data have been compared to
and found to give relatively accurate results.
1
Chapter 1
Introduction and Literature Review
Current electronics cooling technologies are fast approaching a limit. With each
iteration of electronic devices, either the power density is increased or the package
becomes smaller. These can lead to increased thermal management issues. Currently
employed low-cost heating solutions such as heat sinks, with or without a traditional heat
pipe, will soon be unable to handle the heat load effectively. There are many new
technologies under investigation to become the next generation of thermal management
device. One such device was invented and patented in 1990 by Akachi [1]. He describes
a structure in which only a liquid and its vapor phase are present separated into a train of
liquid plugs and vapor bubbles. In this structure, the vapor bubble completely blocks the
liquid from flowing past it, provided the hydraulic diameter is small enough to provide
such a formation. The hydraulic diameter must be small enough that the liquid can form a
complete meniscus: without it, the device won’t function. It is governed by the critical
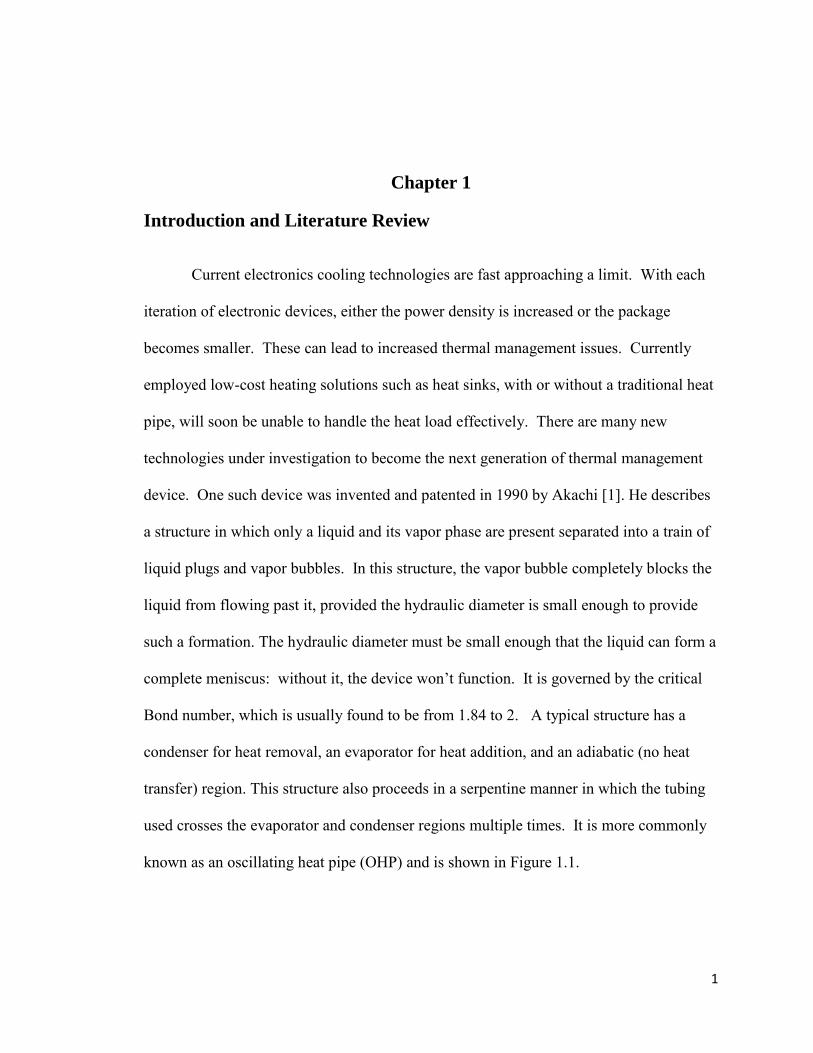
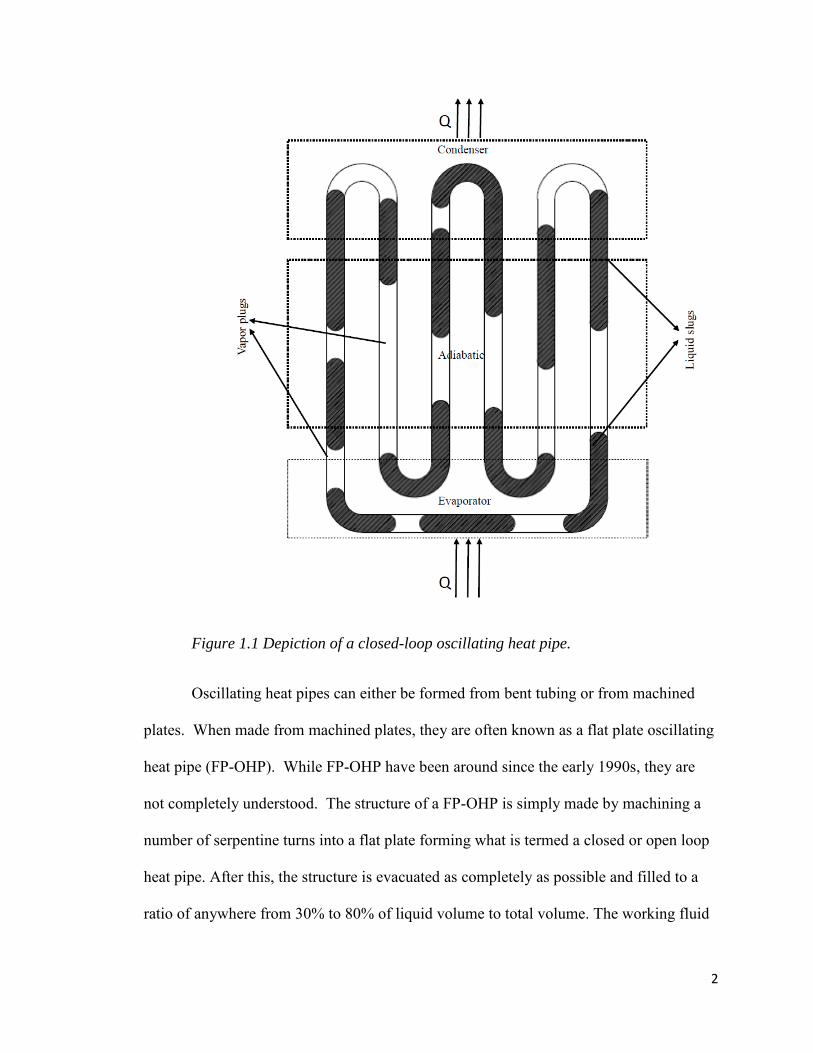
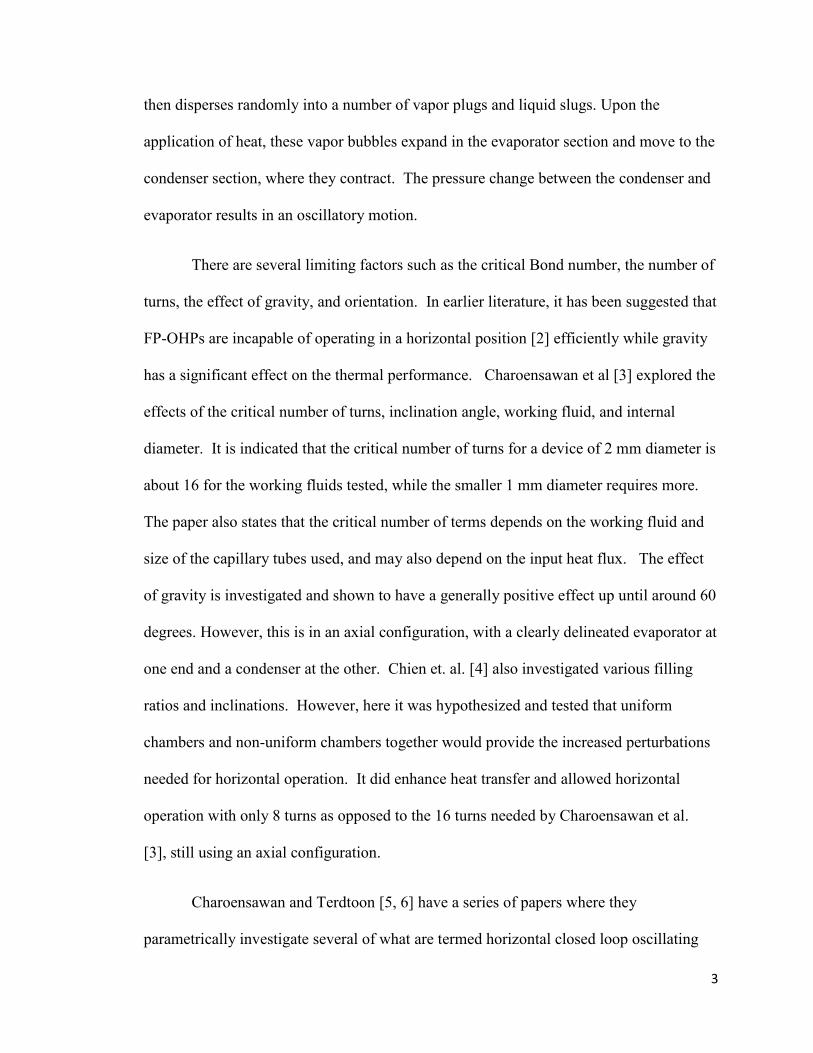
Bond number, which is usually found to be from 1.84 to 2. A typical structure has a
condenser for heat removal, an evaporator for heat addition, and an adiabatic (no heat
transfer) region. This structure also proceeds in a serpentine manner in which the tubing
used crosses the evaporator and condenser regions multiple times. It is more commonly
known as an oscillating heat pipe (OHP) and is shown in Figure 1.1.
2
Figure 1.1 Depiction of a closed-loop oscillating heat pipe.
Oscillating heat pipes can either be formed from bent tubing or from machined
plates. When made from machined plates, they are often known as a flat plate oscillating
heat pipe (FP-OHP). While FP-OHP have been around since the early 1990s, they are
not completely understood. The structure of a FP-OHP is simply made by machining a
number of serpentine turns into a flat plate forming what is termed a closed or open loop
heat pipe. After this, the structure is evacuated as completely as possible and filled to a
ratio of anywhere from 30% to 80% of liquid volume to total volume. The working fluid
3
then disperses randomly into a number of vapor plugs and liquid slugs. Upon the
application of heat, these vapor bubbles expand in the evaporator section and move to the
condenser section, where they contract. The pressure change between the condenser and
evaporator results in an oscillatory motion.
There are several limiting factors such as the critical Bond number, the number of
turns, the effect of gravity, and orientation. In earlier literature, it has been suggested that
FP-OHPs are incapable of operating in a horizontal position [2] efficiently while gravity
has a significant effect on the thermal performance. Charoensawan et al [3] explored the
effects of the critical number of turns, inclination angle, working fluid, and internal
diameter. It is indicated that the critical number of turns for a device of 2 mm diameter is
about 16 for the working fluids tested, while the smaller 1 mm diameter requires more.
The paper also states that the critical number of terms depends on the working fluid and
size of the capillary tubes used, and may also depend on the input heat flux. The effect
of gravity is investigated and shown to have a generally positive effect up until around 60
degrees. However, this is in an axial configuration, with a clearly delineated evaporator at
one end and a condenser at the other. Chien et. al. [4] also investigated various filling
ratios and inclinations. However, here it was hypothesized and tested that uniform
chambers and non-uniform chambers together would provide the increased perturbations
needed for horizontal operation. It did enhance heat transfer and allowed horizontal
operation with only 8 turns as opposed to the 16 turns needed by Charoensawan et al.
[3], still using an axial configuration.
Charoensawan and Terdtoon [5, 6] have a series of papers where they
parametrically investigate several of what are termed horizontal closed loop oscillating
4
heat pipes. An empirical model is presented based on the dimensionless Prandtl number
of the liquid, Karman number, and the modified Jacob number as well as the filling ratio,
Bond Number, Kutateladze number, and the ratio of thermal conductivities of the cooling
fluid and the ambient air. All are presented relative to axial configuration heat pipes. The
standard deviation is 30% and is found to agree well with their previous research data.
Ma et al. [7] develop a model for the prediction of the oscillating motions and the
temperature difference between the evaporator and condenser in an oscillating heat pipe.
Considered are the forced convection due to oscillations, confined evaporative heat
transfer in the evaporator and condenser, and the thin film condensation. They found
that the amplitude depends on the operating temperature. However, results show that
increasing temperature has no effect on the frequency. It is noticed from the experiments
that there must be an onset temperature difference for the development of the oscillatory
motions. There is good agreement with 20˚C, but not as good with 60˚C by under-
predicting the experimental results. The results are very good even though possible
circulation of fluid is not considered. The experimental data referenced is again of an
axial nature. It shows that oscillating motion is most easily achieved in the bottom heat
mode in a vertical orientation and that the oscillating motion is far less dependent upon
gravity with an increasing number of turns. The equations presented can only be solved
if the evaporator temperature is given and then they are iterated with Chen’s [8] model.
The model agrees with previous findings that 90% or more of the heat transfer is through
sensible heat. Correlations with an earlier paper’s experimental data are presented and
found to be more accurate at lower top temperature of 20 ˚C, but still good agreement
otherwise.
5
Khandekar et al. [9] explored the effect of a number of parameters such as
inclination angle, thermo-physical properties of the working fluid, the inner tube
diameter, the number of turns, and the evaporator length in an attempt to come up with an
empirical model. They added a Karman number, defined from non-dimensional numbers
of interest, which is considered to be a suitable velocity scale for closed loop pulsating
heat pipes (CLPHP). The effect of inclination and thermo-hydrodynamic boundary
conditions were considered. However, here it is again noted that it is only an axial flow.
Khandekar and Groll [10] conducted a review of what CLPHP are with conditions. It is
suggested that a large number of turns and a high input heat flux are necessary for
horizontal CLPHP performance. It is also shown that there is a minimum heat flux or
temperature needed for a successful startup which is lowered by a larger number of turns,
though it is shown that bottom heating mode requires less power than top heating mode.
Thermal resistance decreases with increasing heat input until it is limited by heat removal
on air side. CLPHPs do not operate outside of the range of 20% to 80% filling ratios:
Sensitivity decreases with more heat input. It is also suggested that CLPHP can be
studied with an effective thermal conductivity approach, at least to a certain extent. It is
notable that thermal spreading is still not considered.
Khandekar and Groll [10] gave a background of modeling attempts. Listed are
what is termed Type I, II, III, IV, V, and VI modeling approaches. Type I starts with a
single spring mass approach, type II is a system of spring mass approach, type III applies
conservation approaches to slug-plug flow, type IV analysis highlights the existence of
chaos in some approaches, type V uses artificial neural network modeling, and type VI is
semi-empirical modeling. All of these approaches have some success, but with the

6
exception of type VI, they are limited because of extreme simplification. That is to say,
they don’t represent true thermo-fluidic behavior. The last approach is still under
investigation. Khandekar et al. [10] analyzed other similar passive heat transfer systems
in an attempt to explain CLPHP behavior better. Conventional two phase flow modeling
is attempted with estimations of each necessary parameter. This allows effective thermal
resistance with appropriate correlations in the evaporator and condenser of the device.
However, it is further limited in that it only considers two phase flow conditions in axial
configuration and cannot handle a horizontal (non-gravity assisted) configuration. The
paper does admit there are limitations to the model presented and that this paper is only a
stepping-stone to discover the true operation of CLPHPs.
Thompson et al. [11] explored a three dimensional FPOHP in centered bottom
heating mode. This means that the heat pipe presented for performance evaluation is
positioned parallel to the ground with the heat source on the bottom center. The thermal
performance in regards to thermal spreading is presented. Thermal resistance is
calculated from experimental data. The three dimensional FPOHP is explored in
increments of 10 watts from 25 Watts at 1 m/s air velocity until its maximum input of
230 watts at an air flow velocity of 3 m/s. It is compared with a copper slab control to
verify any change in performance. While there isn’t much of a change, it is noted that as
air flow velocity increases, there is a 10 to 15 percent reduction in surface temperatures,
indicating the air flow affects the FPOHP performance.
These studies generally investigated how an oscillating heat pipe functions and
what the governing parameters are. While not all directly pertinent to the current
investigation, they do provide some useful guiding parameters. For a given working fluid,
7
a specific diameter is needed as defined by the Bond number. In order to operate in the
horizontal position, a large number of turns (as well as a large input heat flux) are needed
where more is generally better. While nearly any material can be used to make a FPOHP,
copper and aluminum are both easier to machine and give better performance than such
materials as glass or plastics. Generally, the thermal conductivity order of magnitude
should be fairly well known. However, most of these configurations are tested using
clearly defined condenser and evaporator regions but only in axial configurations.
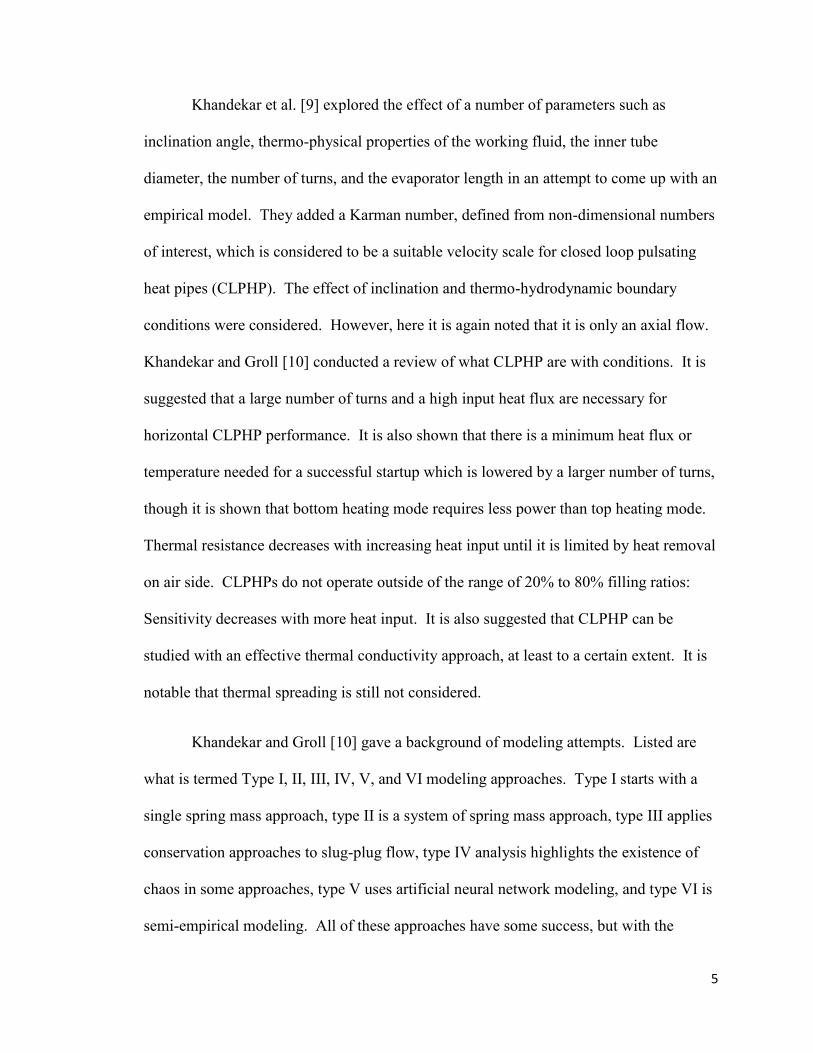
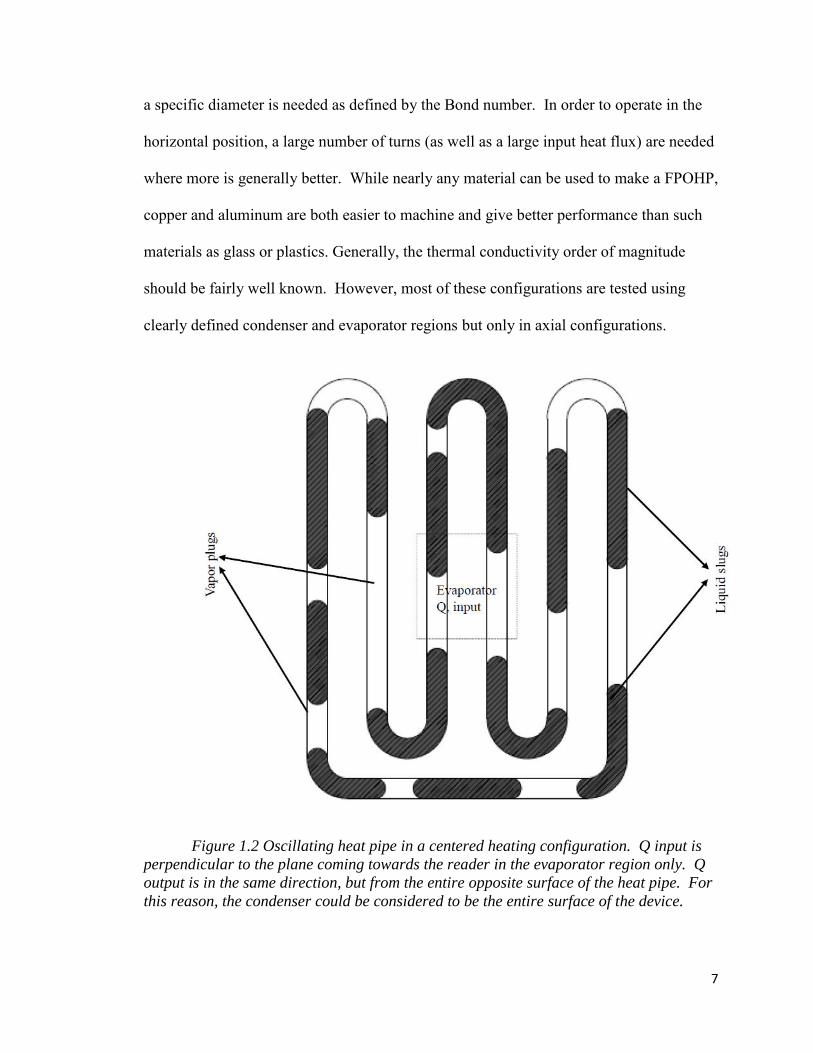
Figure 1.2 Oscillating heat pipe in a centered heating configuration. Q input is
perpendicular to the plane coming towards the reader in the evaporator region only. Q
output is in the same direction, but from the entire opposite surface of the heat pipe. For
this reason, the condenser could be considered to be the entire surface of the device.
8
Of primary interest to this investigation is a FPOHP in bottom centered heating
mode, generally known as a thermal spreading configuration. Many devices are often
more practically run with a thermal spreading configuration. Not the least of these is a
typical computer configuration with a heat sink. The chip generally is presented centered
below the heat sink generating a known heat flux, Q. In terms of FPOHP, this leads to a
very clearly defined evaporator region, but the condenser region and adiabatic regions
aren’t so well known and may very well be the same geometrically defined region.
Figure 1.2 shows such a configuration. Also of primary interest to this investigation is
whether the temperature difference can be accurately predicted through mathematical and
experimental means. This would be a welcome step towards actually being able to
design for specific needs. The models thus presented generally are concerned with the
interior physics, start up condition, time to start up, etc. They are very complex and often
of impractical value for those interested in designing a FPOHP for specific needs. The
heat pipe to be investigated here will be as a thermal spreading FPOHP in centered
bottom heating configuration. Specifically, whether or not it is possible to predict the
upper surface temperature and thus a possible maximum output.
9
Chapter 2
Mathematical Model
2.1 Approach
Many models have been attempted with varying degrees of success to predict how
an oscillating heat pipe (OHP) functions. Zhang and Fahgri [12] listed over 50 papers in
an attempt to update and outline the issues still concerning the knowledge of oscillating
heat pipes, many of which attempted mathematical models. These models generally have
two things in common: They try to predict the performance or physics inside of the heat
pipe and not many of them are practical from an industrial standpoint as they are very
complex. These models can be useful in understanding the governing parameters of an
OHP. The OHP must generally have a large number of turns in order to overcome
gravitational effect problems. Surface tension must dominate gravitational forces; to that
end the diameter must have a certain critical value met which is governed by the Bond
number. Generally speaking, the measured thermal resistance is between 0.03 K/W and
0.08 K/W. To this end, a simple resistance network is proposed as outlined in Fig. 2.1.

10
Figure 2.1 Basic depiction of the thermal resistance network.
Conductive and convective resistances are well known and there are many useful
models to calculate them based on geometry, flow patterns of cooling fluid, etc.
However, thermal spreading is a phenomenon which has generally been well
documented, but isn’t particularly easy to model. Ellison [13] obtained an exact solution
to this issue for rectangular plates with centered heat sources with non-unity aspect ratios.
A FPOHP with centered heating is similar to the one investigated by Ellison [13]. The
difference is that a constant thermal conductivity is assumed for the FPOHP. Following
the procedure described by Ellison [13], the physical model as shown in Fig. 2.2 is
established.
𝑇𝑠𝑜𝑢𝑟𝑐𝑒 𝑇∞
Conductive and
Convective Resistance 𝑅𝑈
Spreading Resistance 𝑅𝑠𝑝
11
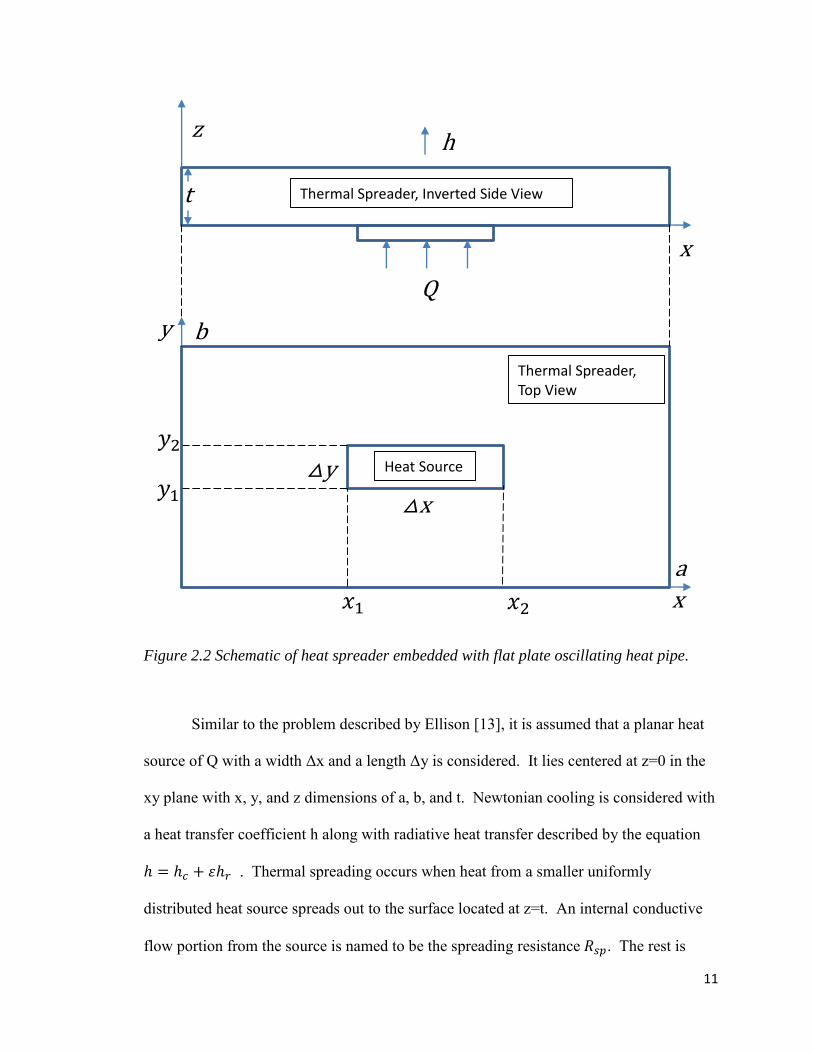
Figure 2.2 Schematic of heat spreader embedded with flat plate oscillating heat pipe.
Similar to the problem described by Ellison [13], it is assumed that a planar heat
source of Q with a width Δx and a length Δy is considered. It lies centered at z=0 in the
xy plane with x, y, and z dimensions of a, b, and t. Newtonian cooling is considered with
a heat transfer coefficient h along with radiative heat transfer described by the equation
ℎ = ℎ𝑐 + 휀ℎ𝑟 . Thermal spreading occurs when heat from a smaller uniformly
distributed heat source spreads out to the surface located at z=t. An internal conductive
flow portion from the source is named to be the spreading resistance 𝑅𝑠𝑝. The rest is
Q
h
t
z
x
x
a
y
x
𝑥1 𝑥2
𝑦1
𝑦2
y
Thermal Spreader, Inverted Side View
Heat Source
Thermal Spreader, Top View
b

12
quantified as 𝑅𝑢 and is shown to be the sum of internal 1 dimensional conductive
resistance and exterior Newtonian cooling. The energy equation governing the
temperature distribution of the FPOHP with a constant thermal conductivity can be found
as:
𝜕2𝑇
𝜕𝑥2+
𝜕2𝑇
𝜕𝑦2+𝜕2𝑇
𝜕𝑧2= −
𝑄𝑣𝑜𝑙
𝑘 (2.1)
It has boundary conditions of:
𝑘𝜕𝑇
𝜕𝑥= 0 𝑎𝑡 𝑥 = 0, 𝑎; 𝑘 𝜕𝑇
𝜕𝑦= 0 𝑎𝑡 𝑦 = 0, 𝑏 (2.2)
𝑘𝜕𝑇
𝜕𝑧= 0 𝑎𝑡 𝑧 = 0; 𝑘 𝜕𝑇
𝜕𝑧= −ℎ𝑇 𝑎𝑡 𝑧 = 𝑡
The first set of boundary conditions gives adiabatic surfaces at the plate edges, which is a
reasonable assumption for a FPOHP. The second set assumes a well-insulated constant
temperature (adiabatic) plane at z=0, with the exception of the heat source Qvol. Qvol is a
uniform volumetric heat source in three dimensions for which where is a known
analytical solution. All heat removal is through the heat sink at the top of the set up.
This is also a reasonable assumption for a FPOHP in a wind tunnel with well insulated
surfaces except for the heat removal surface. The ambient temperature is assumed to be
zero so all calculated temperatures are temperature rises. The volumetric heat source,
Qvol, is represented by a double Fourier series in the xy plane with z dependent Fourier
coefficients 𝜙𝑙𝑚(𝑧), i.e.
𝑄𝑣𝑜𝑙(𝑥, 𝑦, 𝑧) = ∑ ∑ 휀𝑙휀𝑚 𝜙𝑙𝑚(𝑧) cos (𝑙𝜋𝑥
𝑎) cos (
𝑚𝜋𝑦
𝑏)∞
𝑚=0∞𝑙=0 (2.3)
The temperature distribution is set up to be a similar format to the heat source, i.e.

13
𝑇(𝑥, 𝑦, 𝑧) = ∑ ∑ 휀𝑙휀𝑚 𝜓𝑙𝑚(𝑧) cos (𝑙𝜋𝑥
𝑎) cos (
𝑚𝜋𝑦
𝑏)∞
𝑚=0∞𝑙=0 (2.4)
Shown below are the source Fourier coefficients derived for adiabatic edge boundary
conditions. They are made easier to solve via the assumption of a uniform heat flux
q(x,y) at the z=0 plate surface using the Dirac delta function δ(z) such that
Q(x,y,z)=q(x,y) δ(z). This results in
𝜙00 =4
𝑎𝑏∫ ∫ 𝑄𝑣𝑜𝑙𝑑𝑥𝑑𝑦
𝑦=𝑏
𝑦=0
𝑥=𝑎
𝑥=0
=4
𝑎𝑏𝑞(𝑥, 𝑦)𝛿(𝑧)(𝑥2 − 𝑥1)(𝑦2 − 𝑦1) (2.5)
𝜙𝑙0 =4
𝑎𝑏∫ ∫ 𝑄𝑣𝑜𝑙𝑐𝑜𝑠 (
𝑙𝜋𝑥
𝑎) 𝑑𝑥𝑑𝑦
𝑦=𝑏
𝑦=0
𝑥=𝑎
𝑥=0
=4
𝑙𝜋𝑏𝑞(𝑥, 𝑦)𝛿(𝑧)(𝑦2 − 𝑦1) [sin (
𝑙𝜋𝑥2
𝑎) − sin (
𝑙𝜋𝑥1
𝑎)] (2.6)
𝜙0𝑚 =4
𝑎𝑏∫ ∫ 𝑄𝑣𝑜𝑙𝑐𝑜𝑠 (
𝑚𝜋𝑦
𝑏)𝑑𝑥𝑑𝑦
𝑦=𝑏
𝑦=0
𝑥=𝑎
𝑥=0
=4
𝜋𝑚𝑎𝑞(𝑥, 𝑦)𝛿(𝑧)(𝑥2 − 𝑥1) [sin (
𝑚𝜋𝑦2
𝑏) − sin (
𝑚𝜋𝑦1
𝑏)] (2.7)
𝜙𝑙𝑚 =4
𝑎𝑏∫ ∫ 𝑄𝑣𝑜𝑙𝑐𝑜𝑠 (
𝑙𝜋𝑥
𝑎) 𝑐𝑜𝑠 (
𝑚𝜋𝑦
𝑏)𝑑𝑥𝑑𝑦
𝑦=𝑏
𝑦=0
𝑥=𝑎
𝑥=0
=4
𝜋2𝑙𝑚𝑞(𝑥, 𝑦)𝛿(𝑧) [sin (
𝑙𝜋𝑥2
𝑎) − sin (
𝑙𝜋𝑥1
𝑎)] [sin (
𝑚𝜋𝑦2
𝑏) − sin (
𝑚𝜋𝑦1
𝑏)] (2.8)
14
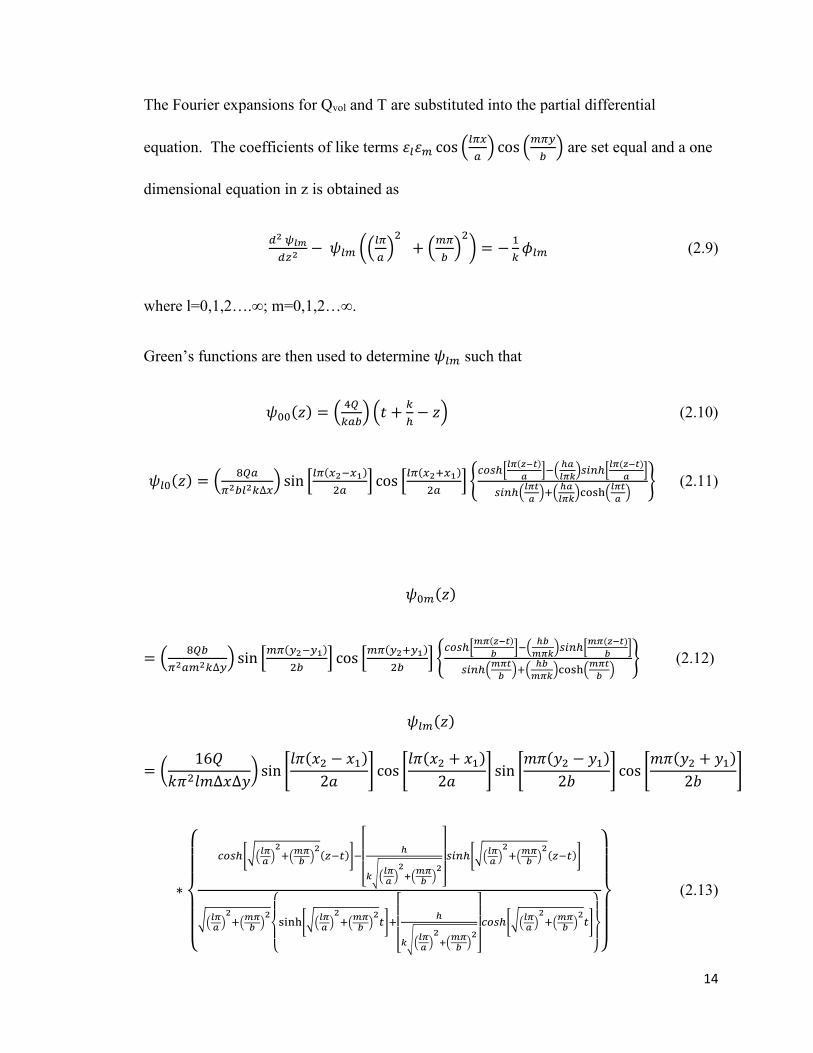
The Fourier expansions for Qvol and T are substituted into the partial differential
equation. The coefficients of like terms 휀𝑙휀𝑚 cos (𝑙𝜋𝑥
𝑎) cos (
𝑚𝜋𝑦
𝑏) are set equal and a one
dimensional equation in z is obtained as
𝑑2 𝜓𝑙𝑚
𝑑𝑧2− 𝜓𝑙𝑚 ((
𝑙𝜋
𝑎)2
+ (𝑚𝜋
𝑏)2
) = −1
𝑘𝜙𝑙𝑚 (2.9)
where l=0,1,2….∞; m=0,1,2…∞.
Green’s functions are then used to determine 𝜓𝑙𝑚 such that
𝜓00(𝑧) = (4𝑄
𝑘𝑎𝑏) (𝑡 +
𝑘
ℎ− 𝑧) (2.10)
𝜓𝑙0(𝑧) = (8𝑄𝑎
𝜋2𝑏𝑙2𝑘∆𝑥) sin [
𝑙𝜋(𝑥2−𝑥1)
2𝑎] cos [
𝑙𝜋(𝑥2+𝑥1)
2𝑎]
𝑐𝑜𝑠ℎ[𝑙𝜋(𝑧−𝑡)
𝑎]−(
ℎ𝑎
𝑙𝜋𝑘)𝑠𝑖𝑛ℎ[
𝑙𝜋(𝑧−𝑡)
𝑎]
𝑠𝑖𝑛ℎ(𝑙𝜋𝑡
𝑎)+(
ℎ𝑎
𝑙𝜋𝑘)cosh (
𝑙𝜋𝑡
𝑎)
(2.11)
𝜓0𝑚(𝑧)
= (8𝑄𝑏
𝜋2𝑎𝑚2𝑘∆𝑦) sin [
𝑚𝜋(𝑦2−𝑦1)
2𝑏] cos [
𝑚𝜋(𝑦2+𝑦1)
2𝑏]
𝑐𝑜𝑠ℎ[𝑚𝜋(𝑧−𝑡)
𝑏]−(
ℎ𝑏
𝑚𝜋𝑘)𝑠𝑖𝑛ℎ[
𝑚𝜋(𝑧−𝑡)
𝑏]
𝑠𝑖𝑛ℎ(𝑚𝜋𝑡
𝑏)+(
ℎ𝑏
𝑚𝜋𝑘)cosh (
𝑚𝜋𝑡
𝑏)
(2.12)
𝜓𝑙𝑚(𝑧)
= (16𝑄
𝑘𝜋2𝑙𝑚∆𝑥∆𝑦) sin [
𝑙𝜋(𝑥2 − 𝑥1)
2𝑎] cos [
𝑙𝜋(𝑥2 + 𝑥1)
2𝑎] sin [
𝑚𝜋(𝑦2 − 𝑦1)
2𝑏] cos [
𝑚𝜋(𝑦2 + 𝑦1)
2𝑏]
∗
𝑐𝑜𝑠ℎ[√(𝑙𝜋𝑎)2+(𝑚𝜋
𝑏)2(𝑧−𝑡)]−
[
ℎ
𝑘√(𝑙𝜋𝑎)2+(𝑚𝜋𝑏)2
]
𝑠𝑖𝑛ℎ[√(𝑙𝜋𝑎)2+(𝑚𝜋
𝑏)2(𝑧−𝑡)]
√(𝑙𝜋𝑎)2+(𝑚𝜋
𝑏)2
sinh[√(𝑙𝜋𝑎)2+(𝑚𝜋
𝑏)2𝑡]+
[
ℎ
𝑘√(𝑙𝜋𝑎)2+(𝑚𝜋𝑏)2
]
𝑐𝑜𝑠ℎ[√(𝑙𝜋𝑎)2+(𝑚𝜋
𝑏)2𝑡]
(2.13)

15
These values are then substituted into the assumed temperature distribution and expanded
to clearly show the l=m=0; l=0; m=0; l=m≠0 terms.
𝑇(𝑥, 𝑦, 𝑧) =
(1
4)𝜓00 + ∑ (
1
2)∞
𝑙=1 𝜓𝑙0 cos (𝑙𝜋𝑥
𝑎) + ∑ (
1
2)∞
𝑚=1 𝜓0𝑚 cos (𝑚𝜋𝑦
𝑏) +
∑ ∑ 𝜓𝑙𝑚 cos (𝑙𝜋𝑥
𝑎) cos (
𝑚𝜋𝑦
𝑏)∞
𝑚=1∞𝑙=1 (2.14)
T(x,y,z) is next defined as the sum of two terms such that
𝑇(𝑥, 𝑦, 𝑧) = 𝑇𝑢 + 𝑇𝑠𝑝 (2.15)
𝑇𝑢 = (1
4)𝜓00 (2.16)
𝑇𝑠𝑝 =
∑ (1
2)∞
𝑙=1 𝜓𝑙0 cos (𝑙𝜋𝑥
𝑎) + ∑ (
1
2)∞
𝑚=1 𝜓0𝑚 cos (𝑚𝜋𝑦
𝑏) +
∑ ∑ 𝜓𝑙𝑚 cos (𝑙𝜋𝑥
𝑎) cos (
𝑚𝜋𝑦
𝑏)∞
𝑚=1∞𝑙=1 (2.17)
𝑇𝑢 is the term associated with the sum of a 1-D internal conduction term and an external
Newtonian Cooling term. The three series summations are the spreading portion 𝑇𝑠𝑝.
Not shown, but calculated by Ellison [13] are the spreading resistance such that T(x,y,z)
is divided by Q to obtain T(x,y,z)/Q (thermal resistance) and the source coordinates are
inserted into the resulting equation at 𝑥 = 𝑎 2, 𝑦 = 𝑏 2, 𝑧 = 0⁄⁄ to obtain
𝑅 = 𝑇(𝑎 2⁄ , 𝑏 2⁄ , 0)/𝑄.

16
Using 𝑅 = 𝑅𝑢 + 𝑅𝑠𝑝, (2.18)
𝛹
𝑘√∆𝑥∆𝑦=
𝛹𝑈
𝑘√∆𝑥∆𝑦+
𝛹𝑆𝑃
𝑘√∆𝑥∆𝑦 (2.19)
where ΨU and ΨSP are the dimensionless 1D internal resistance (lumped convection and conduction terms) and the thermal spreading resistance, respectively
𝛹𝑈 = 𝑝𝜏√𝛼𝛽 (1 +1
𝐵𝑖𝑜𝑡∙𝜏) (2.20)
𝛹𝑆𝑃 =𝑝
𝜋2√𝛽
𝛼∑
1
𝑙2sin(𝑙𝜋𝛼) ∙ [
1 + (𝐵𝑖𝑜𝑡 ∙ 𝜏2𝑙𝜋𝜏
) tanh(2𝑙𝜋𝜏)
(𝐵𝑖𝑜𝑡 ∙ 𝜏2𝑙𝜋𝜏
) + tanh(2𝑙𝜋𝜏)] +
∞
𝑙=1
1
𝑝𝜋2√𝛼
𝛽∑
1
𝑚2sin(𝑚𝜋𝛽𝑝) ∙ [
1 + (𝐵𝑖𝑜𝑡 ∙ 𝜏2𝑚𝜋𝑝𝜏) tanh
(2𝑚𝜋𝜌𝜏)
(𝐵𝑖𝑜𝑡 ∙ 𝜏2𝑚𝜋𝑝𝜏) + tanh
(2𝑚𝜋𝜌𝜏)] +
∞
𝑚=1
4
𝜋2√𝛼𝛽∙∑∑
1
𝑙𝑚
∞
𝑚=1
∞
𝑙=1
sin(𝑙𝜋𝛼) sin(𝑚𝜋𝛽𝑝) ∙
1+(
𝐵𝑖𝑜𝑡∙𝜏
2𝜋𝜏√𝑙2+𝑚2𝑝2)tanh (2𝜋𝜏√𝑙2+𝑚2𝑝2)
2𝜋𝜏√𝑙2+𝑚2𝑝2[(𝐵𝑖𝑜𝑡∙𝜏
2𝜋𝜏√𝑙2+𝑚2𝑝2)+tanh (2𝜋𝜏√𝑙2+𝑚2𝑝2)]
(2.21)
where 𝛼 = ∆𝑥 𝑎⁄ , 𝛽 = ∆𝑦 𝑏⁄ , 𝑝 = 𝑎 𝑏⁄ , 𝜏 = 𝑡 𝑎⁄ , 𝐵𝑖𝑜𝑡 ∙ 𝜏 = ℎ𝑡 𝑘⁄
α is the dimensionless source width, β is the dimensionless source length, p is the
substrate aspect ratio, τ is the dimensionless rectangular plate thickness, and 𝐵𝑖𝑜𝑡 ∙ 𝜏 is
the dimensionless Biot number and τ product. These series will need to be summed to
around 300 terms to achieve acceptable accuracy for the thermal spreading resistance.
This model assumes that the heat is removed by Newtonian means from a flat plate.
However, this is often not the case and an effective h is needed for real issues, such as

17
heat sinks. With Newtonian cooling from a flat plate assumed from the model, and a
finned heat sink from the other side chosen, the equivalency equation would be:
ℎ𝑒𝑓𝑓𝑎𝑏 = ℎ𝐴𝑡 (1 − (𝑁𝐴𝑓
𝐴𝑡) (1 − 𝜂𝑓)) (2.22)
where heff is the value of h for the model W/m2 K, a and b are the corresponding length
and width in m, h is the actual calculated convection coefficient in W/m2 K, N is the
number of fins, At is the total surface area of the heat sink in m2, Af is the surface area of
a fin in m2, and ηf is the fin efficiency. The fin efficiency is calculated from
𝜂𝑓 =tanh𝑀𝐻
𝑀𝐻 (2.23)
𝑀 = √ℎ𝑃
𝑘𝐴𝑐= √
4ℎ
𝑘𝐷 (2.24)
where h is the heat transfer coefficient in W/m2 K, P is the perimeter in m, k is the base
conductivity in W/m K, Ac is the cross sectional area of the fin in m2, D is the hydraulic
diameter in m, and H is the height of the fin in m.
The respective areas are calculated as follows:
𝐴𝑓 = 𝜋𝐷𝐻 (2.25)
𝐴𝑡 = 𝑁𝐴𝑓 + 𝑎𝑏 − 𝑁𝜋𝐷2
4 (2.26)
18
where Af is the surface area of a single fin in m2, D is the hydraulic diameter in m, and H
is the height of the fin in m. At is the total surface area in m2, a is the length of the base
in m, b is the width of the base in m, and N is the number of fins.
2.2 Continued Approach with Application
The model presented by Ellison [13] deals very well with internal spreading and
resistance. However, it still fails to address properly a predicted heat removal. A
predicted heat removal from the Newtonian cooled side is still needed. It is generally
governed by a Nusselt correlation [14], which is the ratio of the convection to the
conduction of a particular boundary layer calculated as such:
𝑁𝑢 𝐷 ≡ℎ𝐷
𝑘= 𝐶𝑅𝑒 𝐷
𝑛𝑃𝑟1 3⁄ (2.27)
where ℎ is the average convection coefficient in W/m2 K, D is the hydraulic diameter in
m, ReD is the dimensionless Reynold’s number associated with the flow conditions, Pr is
the dimensionless Prandtl number, and C and n are constants based on the Reynold’s
number and chosen from an appropriate table. The Reynold’s number [14] is defined as
𝑅𝑒𝐷 =𝑉𝐷
𝜈𝑎𝑖𝑟 (2.28)
where V is the velocity in m/s, D is the hydraulic diameter in m, and 𝜈𝑎𝑖𝑟 is the kinematic
viscosity of the air in m2/s.
In this model, a pinned finned aligned heat sink is chosen. For this, the Reynold’s
number and Nusselt correlations for flow over a bank of tubes are used. It is inside a
19
closed duct, well insulated, with a known initial temperature and incoming velocity.
These equations are used in conjunction with the Ellison solution to generate predictions
of temperature for a known heat input, Q. Utilizing the resistance formula by Ellison
[13] looks complicated, but it is a very simple approach on the way to computing the heat
removed from the heat sink. Using MatLab, a series of Mfiles is developed to compute
the resistance and the associated values with it.
Initial Considerations
There are a number of initial things to note from the Ellison Solution. To
calculate a resistance, you need a conduction term k, a convective heat coefficient h, and
the associated geometry. The geometry is known. However, the influence of h and k is
still not as well understood intuitively. Varying the model with respect to k and h leads
to these graphs in Figures 2.3 and 2.4.
20
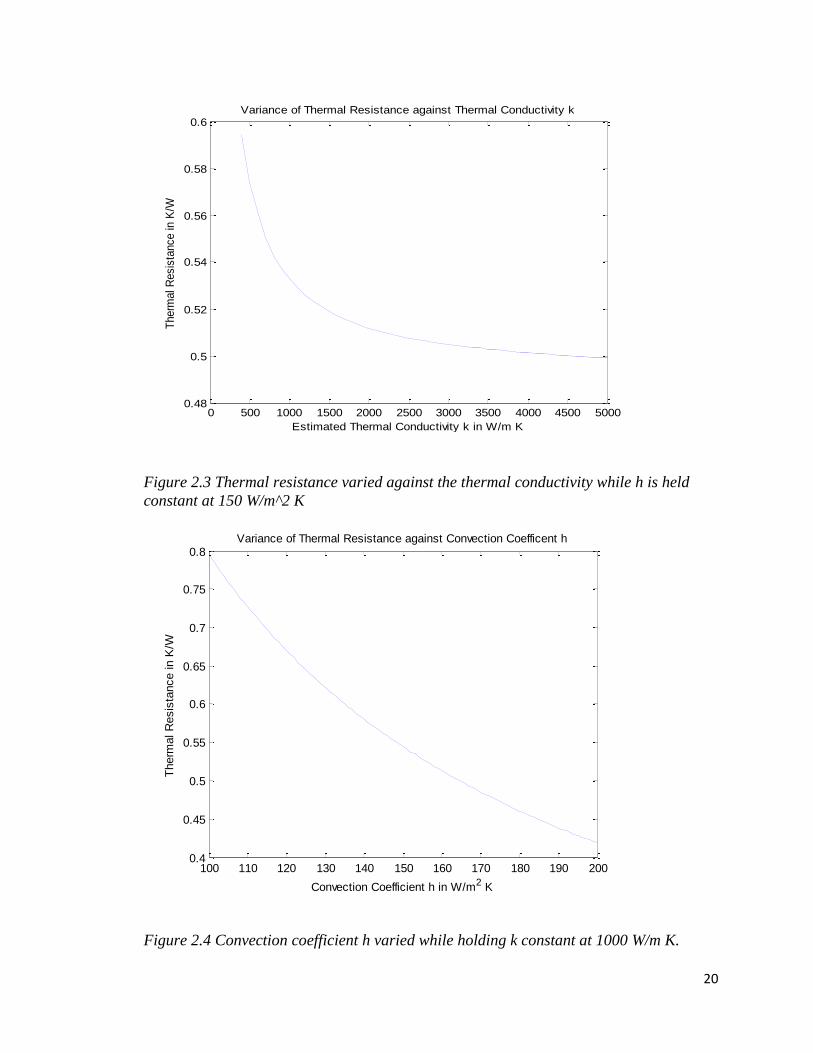
Figure 2.3 Thermal resistance varied against the thermal conductivity while h is held
constant at 150 W/m^2 K
Figure 2.4 Convection coefficient h varied while holding k constant at 1000 W/m K.
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000.48
0.5
0.52
0.54
0.56
0.58
0.6
Estimated Thermal Conductivity k in W/m K
Therm
al R
esis
tance in K
/W
Variance of Thermal Resistance against Thermal Conductivity k
100 110 120 130 140 150 160 170 180 190 2000.4
0.45
0.5
0.55
0.6
0.65
0.7
0.75
0.8
Convection Coefficient h in W/m2 K
Therm
al R
esis
tance in K
/W
Variance of Thermal Resistance against Convection Coefficent h
21
Figure 2.3 is varied for k values ranging from a value of 400 W/m K to 5,000
W/m K, which is on the lower end of reported effective k values for oscillating heat
pipes. After 2000 to 2500 W/m K, it is noticed that the thermal resistance rapidly
approaches 0.5 K/W. Similarly, in Figure 2.4, k is held constant, that h is varied only
over a value of 100 to 200 W/m2 K and dropping noticeably lower than 0.5 K/W while
over a shorter range. As expected, h is the value that needs to be addressed and all
attempts to remove heat are more dependent upon external flow conditions. The thermal
conductivity k is now assumed to be 2500 W/m K
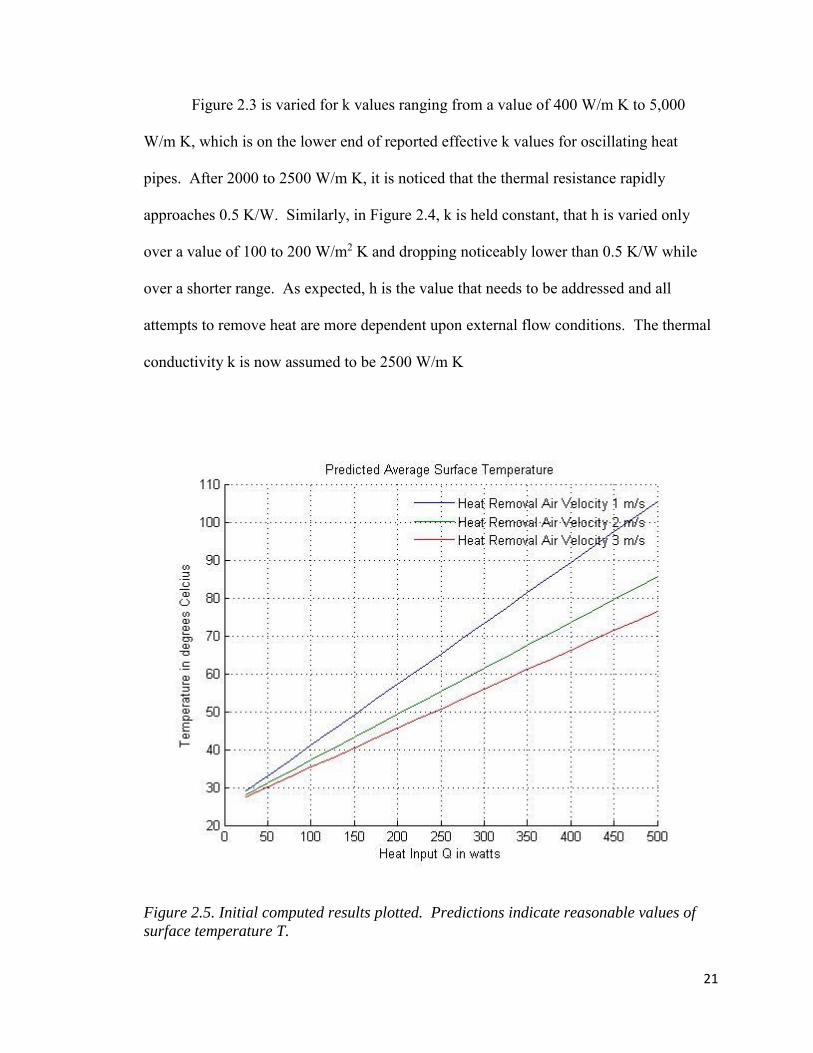
Figure 2.5. Initial computed results plotted. Predictions indicate reasonable values of
surface temperature T.

22
Figure 2.5 shows predicted temperature averages on the surface of the heat sink
vs. the required Q input, which are generally expected values. It is reasonable to expect
that with higher velocity come lower surface temperatures.
23
Chapter 3
Experimental Setup and Procedure
3.1 Experimental Setup
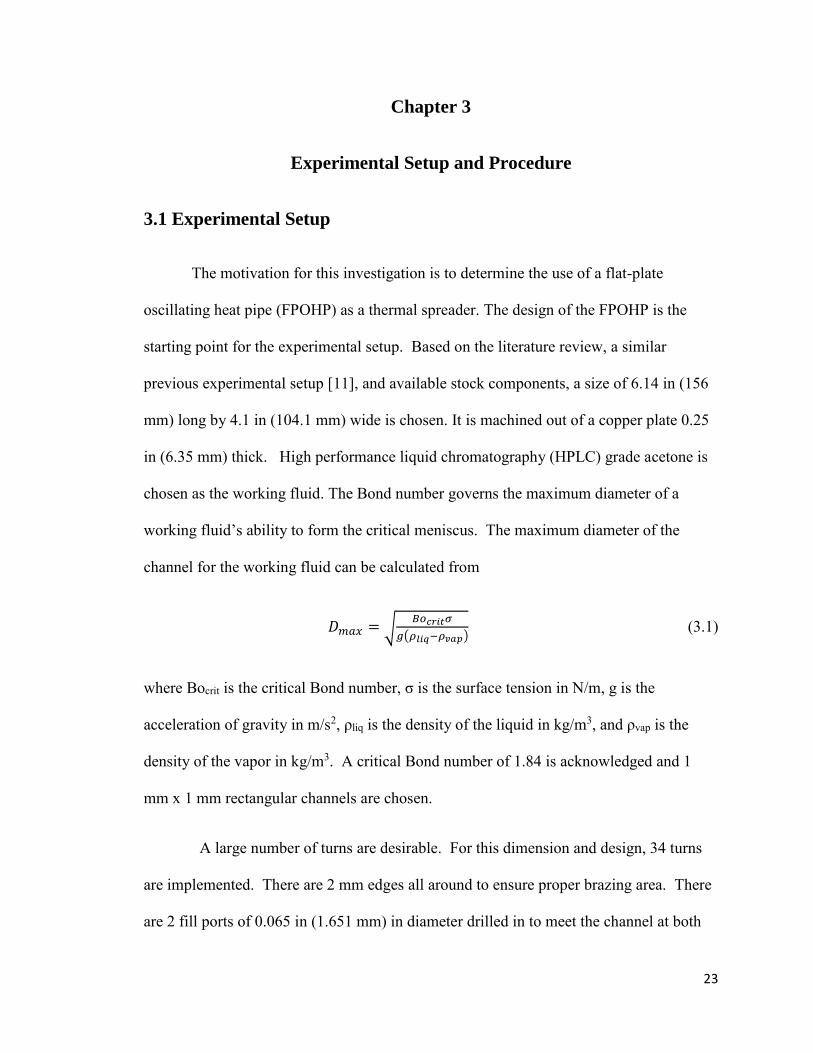
The motivation for this investigation is to determine the use of a flat-plate
oscillating heat pipe (FPOHP) as a thermal spreader. The design of the FPOHP is the
starting point for the experimental setup. Based on the literature review, a similar
previous experimental setup [11], and available stock components, a size of 6.14 in (156
mm) long by 4.1 in (104.1 mm) wide is chosen. It is machined out of a copper plate 0.25
in (6.35 mm) thick. High performance liquid chromatography (HPLC) grade acetone is
chosen as the working fluid. The Bond number governs the maximum diameter of a
working fluid’s ability to form the critical meniscus. The maximum diameter of the
channel for the working fluid can be calculated from
𝐷𝑚𝑎𝑥 = √𝐵𝑜𝑐𝑟𝑖𝑡𝜎
𝑔(𝜌𝑙𝑖𝑞−𝜌𝑣𝑎𝑝) (3.1)
where Bocrit is the critical Bond number, σ is the surface tension in N/m, g is the
acceleration of gravity in m/s2, ρliq is the density of the liquid in kg/m3, and ρvap is the
density of the vapor in kg/m3. A critical Bond number of 1.84 is acknowledged and 1
mm x 1 mm rectangular channels are chosen.
A large number of turns are desirable. For this dimension and design, 34 turns
are implemented. There are 2 mm edges all around to ensure proper brazing area. There
are 2 fill ports of 0.065 in (1.651 mm) in diameter drilled in to meet the channel at both
24
ends. It is covered by stock copper plate 0.03125 in (0.79375 mm) thick and brazed
closed. It is then charged with HPLC grade acetone to a filling ratio of 85 ± 0.5. Design
and photograph of the heat pipe in question follow in Fig. 3.1 and Fig 3.2.
Figure 3.1: Dimensioned drawing of the heat pipe. All dimensions are in mm. Not
shown are the fill ports sited dead center either end or the depth of the channels at 1 mm
each.
25
Figure 3.2: A photograph of the actual heat pipe, pre brazing.
The model indicates a uniform volumetric heat source is needed. A 1 in (0.0254
m) x 1 in (0.0254 m) x 0.25 in (0.00635 m) copper plate has been machined with a
0.0625 in (1.5875 mm) hole dead center. In this hole is affixed an Omega type T
thermocouple for uniform temperature measurement using Omegatherm 201 thermal
26
epoxy. Affixed to this are four 250 Watt/10 Ω chip resistors in series from Barry
Industries. These are attached via 2 clamps directly below and in the center of the
FPOHP.
A stock copper heat sink, model number 4-614111U from Cool Innovations is
chosen. It is 4.1 in (0.1041 m) in width by 6.14 in (0.156 m) in length by 1.1 in (0.0279
m) in height. It has 1350 copper pins and has a reported thermal resistance from between
0.14 to 0.07 °C/W depending on the air speed ranging from 1 to 3 m/s. It agrees well
with a calculated thermal resistance from [14] for a pin fin aligned array. It is affixed via
thermal paste (OmegaTherm 201) and held in place with high temp padded insulation and
gently but firmly clamped.
From Interstate Plastics, acrylic polycarbonate (Lexan) sheets are obtained and
joined for the specified dimensions of the wind pipe and heat sink assembly. The wind
tunnel is 4.1 in (0.1041 m) in width by 1.5 in (0.0381 m) in height by 6 ft (1.8 m) long. It
is joined to the inlet of a blower (KoolTronic, Inc Model K37HXFF rated for 3400 RPM)
and tested at velocities of 1 m/s, 2 m/s, and 3 m/s. The blower is powered by a VARIAC
Transformer (Model Number: JPGC-2KM. Input 110V AC 60 Hz) with manually
controlled input.
Fifteen type T Omega thermocouples (limit ±0.5 ⁰C) attached. Nine are directly
on the heat sink with a variance of ±1 mm on placement to measure temperature
distribution. Two are sited before the heat sink and two after: these are averaged on each
side, respectively, to verify and determine the temperature and that heat is being
removed. One is located at the center of the heat source on bottom to determine
27
maximum temperature for calculation. One is also placed directly on top of a chip resistor
(Barry Industries 250W/ 10Ω chip resistor) to maintain avoidance of unintentional
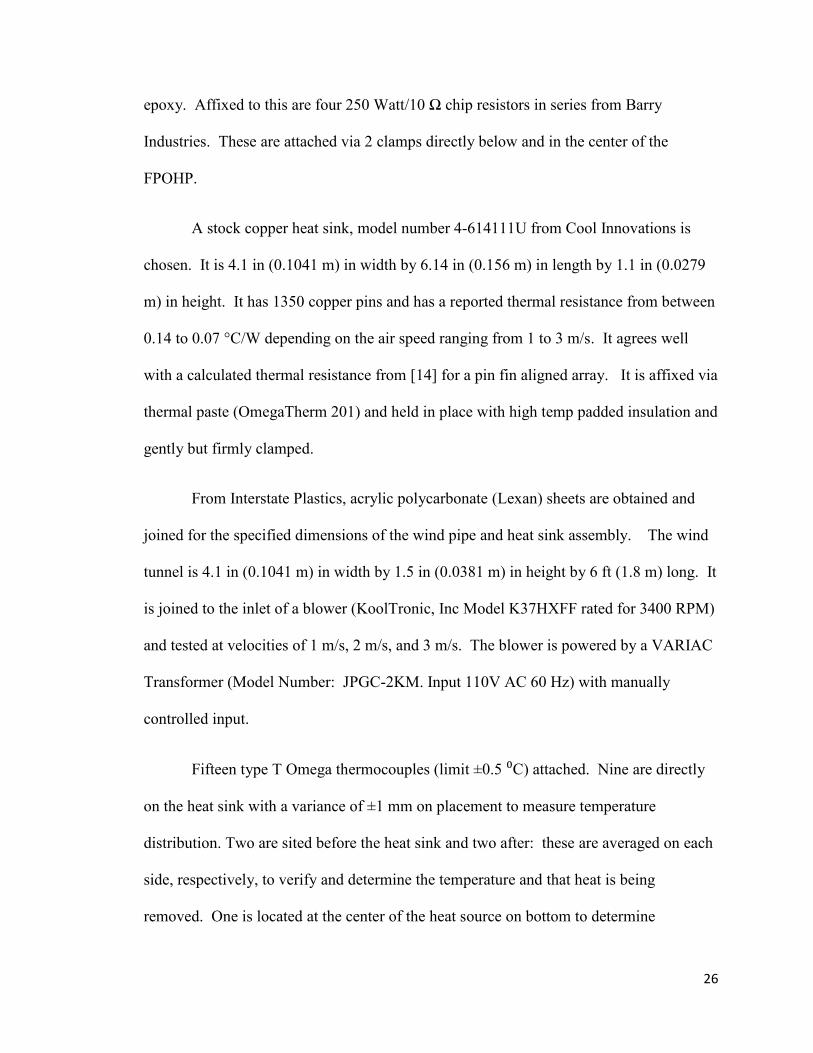
burnout, defined as 100⁰C. The layout for the Omega type T thermocouples on the
surface of the heat sink is shown in Fig. 3.3.
The heater is powered by a DC power supply (Agilent Technologies, Model
N5771A. 300V/5A or 1500 Watts). The resistance of the chip resistors and DC power
supply are verified to 39.8 Ω using a handheld digital multi-meter (Fluke 175 True RMS
DMM). The air duct is well sealed with aluminum heater tape (around all edges of the
heat pipe assembly) to prevent air leakage and the heat loss associated with it, only
allowing air movement through both the entrance and exit of the duct. All exterior
surfaces with thermocouples and heat source are well insulated using fiberglass
Topside view of thermocouple array and flow
pattern. Dashed line indicates heat source
and evaporator
Figure 3.3 Topside view of setup showing flow pattern and thermocouple
array
28
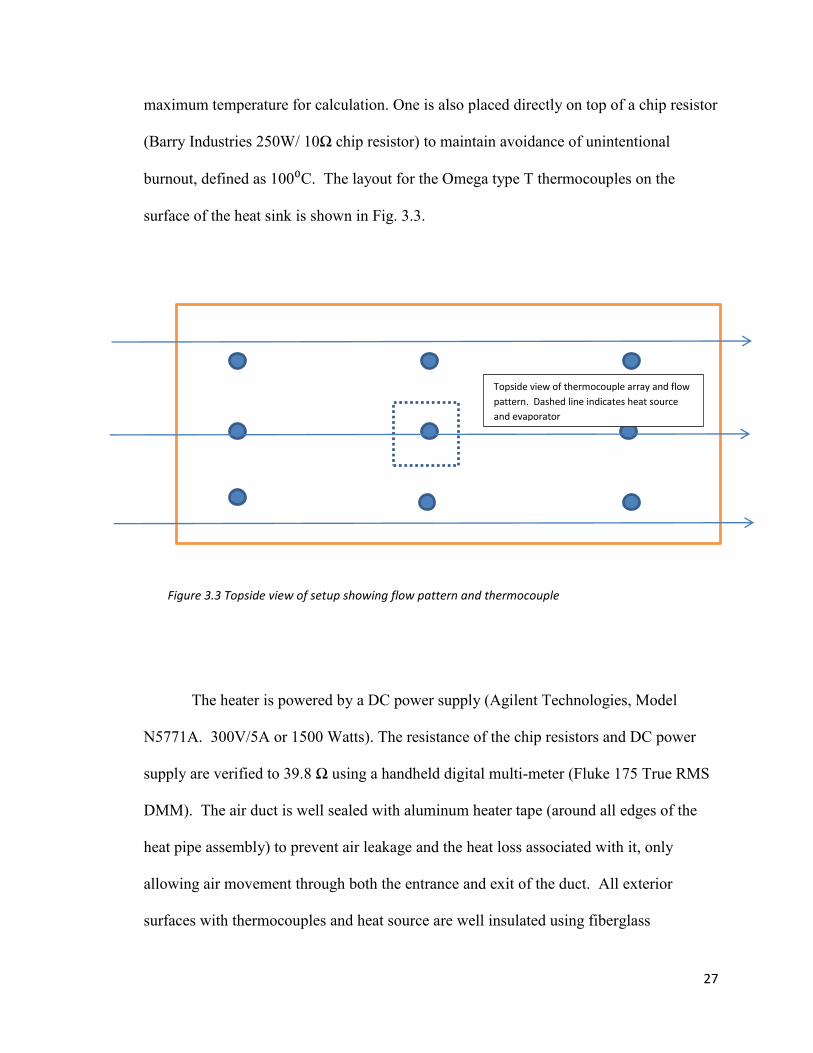
insulation. Design is as depicted in Figures 3.3 and 3.4. These are connected to a DAQ
(National Instruments NI-SCXI-1000) and PC setup (Dell Inspiron 1720 with Windows 7
and Labview Signal Express software package).
Figure 3.5 Block diagram of experimental setup.
29
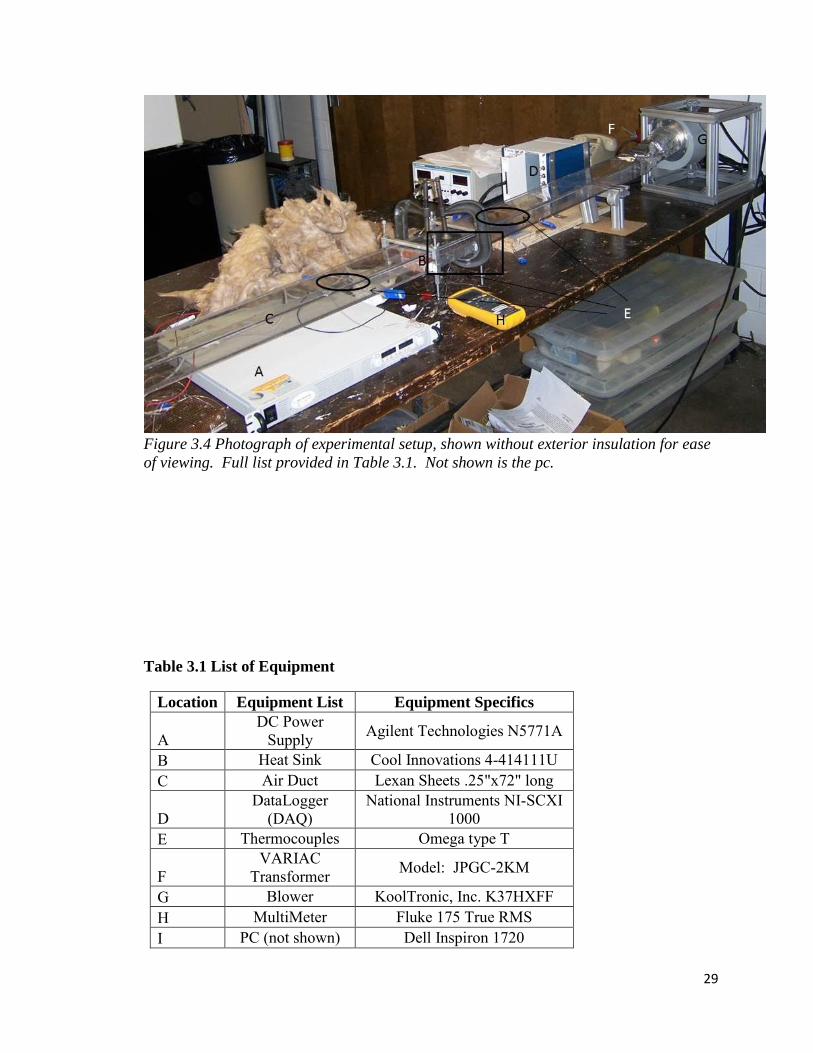
Figure 3.4 Photograph of experimental setup, shown without exterior insulation for ease
of viewing. Full list provided in Table 3.1. Not shown is the pc.
Table 3.1 List of Equipment
Location Equipment List Equipment Specifics
A DC Power
Supply Agilent Technologies N5771A
B Heat Sink Cool Innovations 4-414111U C Air Duct Lexan Sheets .25"x72" long
D DataLogger
(DAQ) National Instruments NI-SCXI
1000 E Thermocouples Omega type T
F VARIAC
Transformer Model: JPGC-2KM
G Blower KoolTronic, Inc. K37HXFF H MultiMeter Fluke 175 True RMS I PC (not shown) Dell Inspiron 1720

30
3.2 Procedure
The assembly is tested at velocities of intervals of 1 m/s from 1 m/s to 3 m/s as
calculated from
𝑄 = 𝑎𝑖𝑟𝑐𝑝,𝑎𝑖𝑟∆𝑇 (3.2)
𝑎𝑖𝑟 = 𝜌𝑎𝑖𝑟𝐴𝑐𝑟𝑜𝑠𝑠𝑉∞ (3.3)
𝑄 = 𝐽𝐼 (3.4)
where Q is the heat input in watts, 𝑎𝑖𝑟 is the mass flow rate of the air in kg/s, ∆𝑇 is the
change in temperature in °C, 𝜌𝑎𝑖𝑟is the density of the air in kg/m3 , 𝐴𝑐𝑟𝑜𝑠𝑠 is the cross
sectional area of the duct in m2 , 𝑉∞ is the average incoming air velocity in m/s, J is the
input voltage in volts, and I is the input current in amperes. For the first input, a minimal
heat input of 10 watts was used to provide a temperature difference to calculate the
velocity. The velocity was manually adjusted by adjusting the input power on the
VARIAC transformer power source for the blower until the needed temperature
difference was reached. The type T thermocouples before and after the heat sink and heat
pipe assembly were averaged for values to verify incoming and exit temperatures. At
these velocities, the heat input is varied in increments of 25 Watts from 25 Watts to a
maximum of 225 Watts. For each increase in heat input, a quasi-steady state was
reached. This took 10 to 15 minutes for each increase in heat input. Temperatures were
recorded for later analysis.
The type T thermocouples on top of the heat sink were used to verify the
temperature distribution and to verify thermal spreading. They were then averaged to
determine an average temperature for the model’s top surface. The thermocouples on the
31
bottom (with the chip resistor setup) are used to verify the temperature of the heat source
and to determine a maximum temperature for later calculation and plotting.
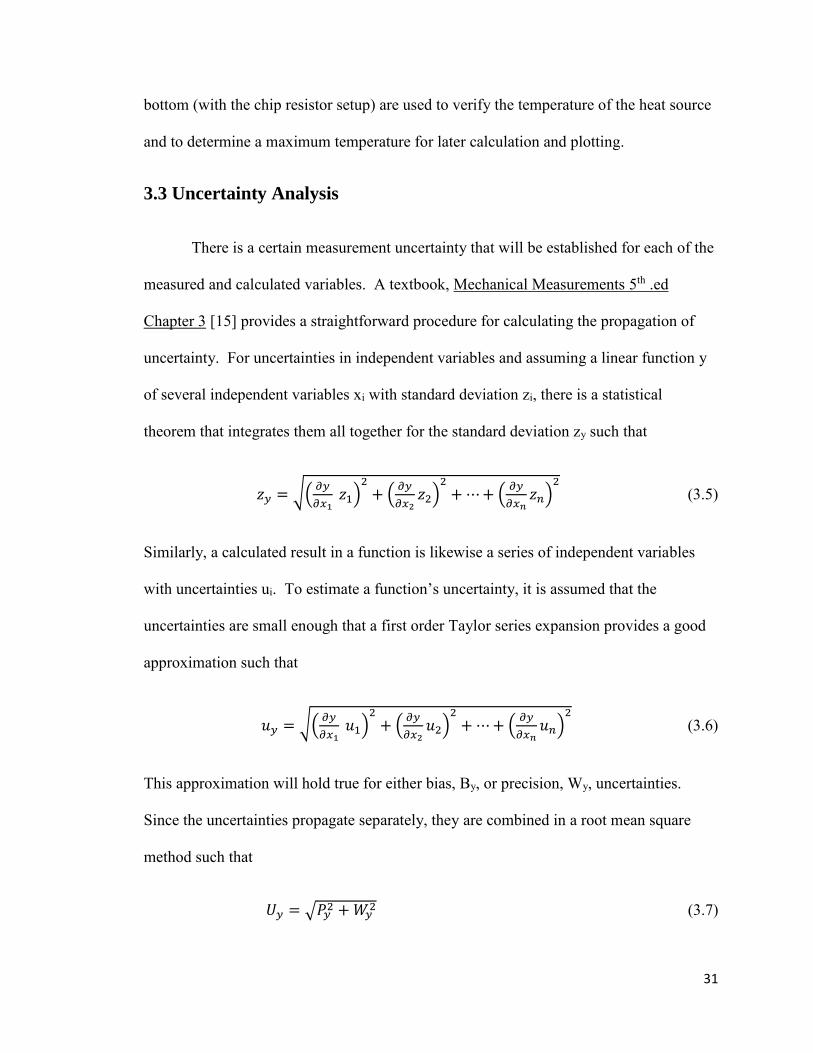
3.3 Uncertainty Analysis
There is a certain measurement uncertainty that will be established for each of the
measured and calculated variables. A textbook, Mechanical Measurements 5th .ed
Chapter 3 [15] provides a straightforward procedure for calculating the propagation of
uncertainty. For uncertainties in independent variables and assuming a linear function y
of several independent variables xi with standard deviation zi, there is a statistical
theorem that integrates them all together for the standard deviation zy such that
𝑧𝑦 = √(𝜕𝑦
𝜕𝑥1 𝑧1)
2
+ (𝜕𝑦
𝜕𝑥2𝑧2)
2
+⋯+ (𝜕𝑦
𝜕𝑥𝑛𝑧𝑛)
2
(3.5)
Similarly, a calculated result in a function is likewise a series of independent variables
with uncertainties ui. To estimate a function’s uncertainty, it is assumed that the
uncertainties are small enough that a first order Taylor series expansion provides a good
approximation such that
𝑢𝑦 = √(𝜕𝑦
𝜕𝑥1 𝑢1)
2
+ (𝜕𝑦
𝜕𝑥2𝑢2)
2
+⋯+ (𝜕𝑦
𝜕𝑥𝑛𝑢𝑛)
2
(3.6)
This approximation will hold true for either bias, By, or precision, Wy, uncertainties.
Since the uncertainties propagate separately, they are combined in a root mean square
method such that
𝑈𝑦 = √𝑃𝑦2 +𝑊𝑦2 (3.7)

32
Following the logic of [15], a procedure is established for calculating the uncertainties
inherent. The initial equations and results will be presented here. However, there are
many derivatives and some, if not most, are excessive for the purposes of this discussion.
All are presented in Appendix C for those who wish the full series of equations.
Combining equations 3.2, 3.3, and 3.4 and solving for V
𝑉 =𝐽𝐼
𝐴𝑐𝑟𝑜𝑠𝑠𝑐𝑝,𝑎𝑖𝑟𝜌𝑎𝑖𝑟∆𝑇 (3.8)
Calculating the derivatives for J, I, Across, and ΔT and using equations 3.6, it is found that
V has a precision uncertainty of 0.002 m/s and a bias uncertainty of 1.5 m/s. Combining
equations 2.27 and 2.28 and solving for h,
ℎ =𝑘
𝐷𝐶𝑃𝑟1/3 (
𝑉𝐷
𝜈𝑎𝑖𝑟)𝑛
(3.9)
Calculating the derivatives for D, V, and νair and using equations 3.6, it is found that h
has a precision uncertainty of 0.31, 0.42, and 0.50 Watts/m2 K and a bias uncertainty of
59.5, 41.1, and 33.1 Watts/m2 K for velocities V of 1, 2, and 3 m/s, respectively.
Combining equations 2.22, 2.23, 2.24, 2.25, and 2.26 and solving for heff
ℎ𝑒𝑓𝑓 =ℎ
4𝑎𝑏(4𝑎𝑏 − 𝐷2𝑁𝜋 −
2𝐷𝑁𝜋 𝑇𝑎𝑛ℎ(2𝐻√ℎ
𝐷𝑘)
√ℎ
𝐷𝑘
) (3.10)
Calculating derivatives for h, a, b, D, and H and using equations 3.6, it is found that heff
has a precision uncertainty of 39.2, 49.7, and 56.3 Watts/m2 K with a bias uncertainty of
638.7, 419.5, and 327.3 Watts/m2 K. Combining equations 2.18, 2.19, 2.20, and 2.21
and reintroducing all dimensioned variables, R is found such that

33
𝑅 =1
√𝑏3𝑎(𝑡
𝑘+
1
ℎ𝑒𝑓𝑓) +
√𝑎3
𝑏3
𝑘∆𝑥𝜋2∑
1
𝑙2𝑆𝑖𝑛 (
𝑙𝜋∆𝑥
𝑎) (
1+ℎ𝑒𝑓𝑓𝑎
2𝑙𝜋𝑘𝑇𝑎𝑛ℎ(
2𝑙𝜋𝑡
𝑎)
ℎ𝑒𝑓𝑓𝑎
2𝑙𝜋𝑘+𝑇𝑎𝑛ℎ(
2𝑙𝜋𝑡
𝑎))1000
𝑙=1 +
√𝑏3
𝑎3
𝑘∆𝑦𝜋2∑
1
𝑚21000𝑚=1 𝑆𝑖𝑛 (
𝑚𝜋𝑎∆𝑦
𝑏2) (
1+ℎ𝑒𝑓𝑓
2𝑘𝑚𝜋𝑇𝑎𝑛ℎ(
2𝑚𝜋𝑡
𝑏)
ℎ𝑒𝑓𝑓
2𝑘𝑚𝜋+𝑇𝑎𝑛ℎ(
2𝑚𝜋𝑡
𝑏)) +
4√𝑎𝑏
𝑘𝜋2∆𝑥∆𝑦∑ ∑
1
𝑙𝑚
1000𝑚=1 𝑆𝑖𝑛 (
𝑙𝜋∆𝑥
𝑎)1000
𝑙=1 𝑆𝑖𝑛 (𝑚𝜋𝑎∆𝑦
𝑏2)
(
1+
ℎ𝑒𝑓𝑓𝑎
2𝜋𝑘√𝑙2+𝑎2𝑚2
𝑏2
𝑇𝑎𝑛ℎ(2𝜋𝑡
𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
(2𝜋𝑡
𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
(
ℎ𝑒𝑓𝑓𝑎
2𝜋𝑘√𝑙2+𝑎2𝑚2
𝑏2
+𝑇𝑎𝑛ℎ(2𝜋𝑡
𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
)
)
(3.11)
Calculating derivatives for h, a, b, t, Δx, and Δy and using equations 3.6 and 3.7, it is
found that R has a total uncertainty of 0.1, 0.09, and 0.08 K/W for V of 1, 2, and 3 m/s
respectively.
34
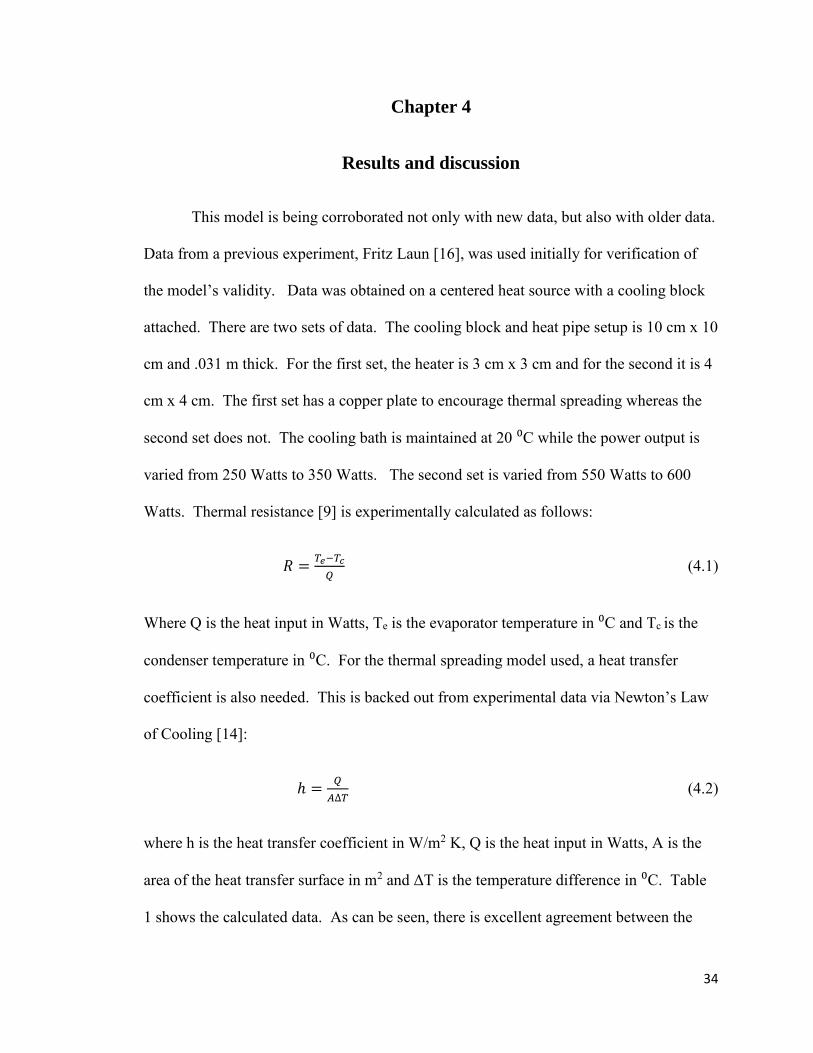
Chapter 4
Results and discussion
This model is being corroborated not only with new data, but also with older data.
Data from a previous experiment, Fritz Laun [16], was used initially for verification of
the model’s validity. Data was obtained on a centered heat source with a cooling block
attached. There are two sets of data. The cooling block and heat pipe setup is 10 cm x 10
cm and .031 m thick. For the first set, the heater is 3 cm x 3 cm and for the second it is 4
cm x 4 cm. The first set has a copper plate to encourage thermal spreading whereas the
second set does not. The cooling bath is maintained at 20 ⁰C while the power output is
varied from 250 Watts to 350 Watts. The second set is varied from 550 Watts to 600
Watts. Thermal resistance [9] is experimentally calculated as follows:
𝑅 = 𝑇𝑒−𝑇𝑐
𝑄 (4.1)
Where Q is the heat input in Watts, Te is the evaporator temperature in ⁰C and Tc is the
condenser temperature in ⁰C. For the thermal spreading model used, a heat transfer
coefficient is also needed. This is backed out from experimental data via Newton’s Law
of Cooling [14]:
ℎ =𝑄
𝐴∆𝑇 (4.2)
where h is the heat transfer coefficient in W/m2 K, Q is the heat input in Watts, A is the
area of the heat transfer surface in m2 and ΔT is the temperature difference in ⁰C. Table
1 shows the calculated data. As can be seen, there is excellent agreement between the
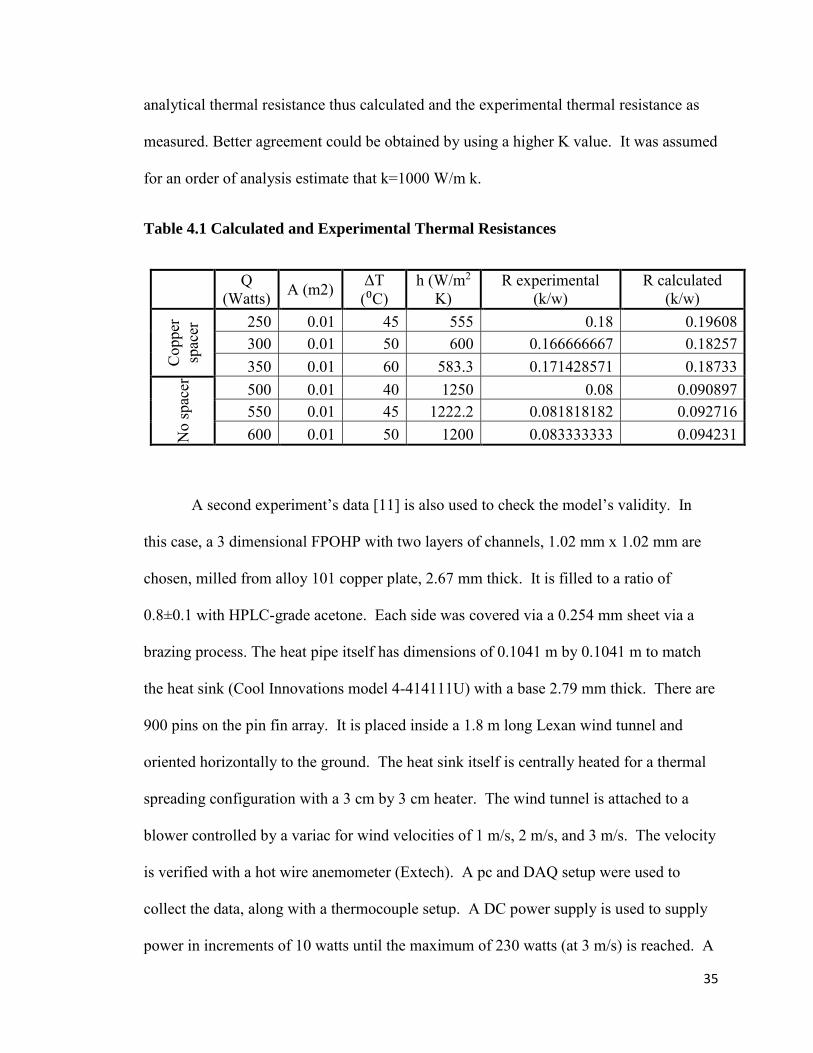
35
analytical thermal resistance thus calculated and the experimental thermal resistance as
measured. Better agreement could be obtained by using a higher K value. It was assumed
for an order of analysis estimate that k=1000 W/m k.
Table 4.1 Calculated and Experimental Thermal Resistances
Q (Watts) A (m2) ΔT
(⁰C) h (W/m2
K) R experimental
(k/w) R calculated
(k/w)
Cop
per
spac
er 250 0.01 45 555 0.18 0.19608
300 0.01 50 600 0.166666667 0.18257 350 0.01 60 583.3 0.171428571 0.18733
No
spac
er
500 0.01 40 1250 0.08 0.090897 550 0.01 45 1222.2 0.081818182 0.092716 600 0.01 50 1200 0.083333333 0.094231
A second experiment’s data [11] is also used to check the model’s validity. In
this case, a 3 dimensional FPOHP with two layers of channels, 1.02 mm x 1.02 mm are
chosen, milled from alloy 101 copper plate, 2.67 mm thick. It is filled to a ratio of
0.8±0.1 with HPLC-grade acetone. Each side was covered via a 0.254 mm sheet via a
brazing process. The heat pipe itself has dimensions of 0.1041 m by 0.1041 m to match
the heat sink (Cool Innovations model 4-414111U) with a base 2.79 mm thick. There are
900 pins on the pin fin array. It is placed inside a 1.8 m long Lexan wind tunnel and
oriented horizontally to the ground. The heat sink itself is centrally heated for a thermal
spreading configuration with a 3 cm by 3 cm heater. The wind tunnel is attached to a
blower controlled by a variac for wind velocities of 1 m/s, 2 m/s, and 3 m/s. The velocity
is verified with a hot wire anemometer (Extech). A pc and DAQ setup were used to
collect the data, along with a thermocouple setup. A DC power supply is used to supply
power in increments of 10 watts until the maximum of 230 watts (at 3 m/s) is reached. A
36
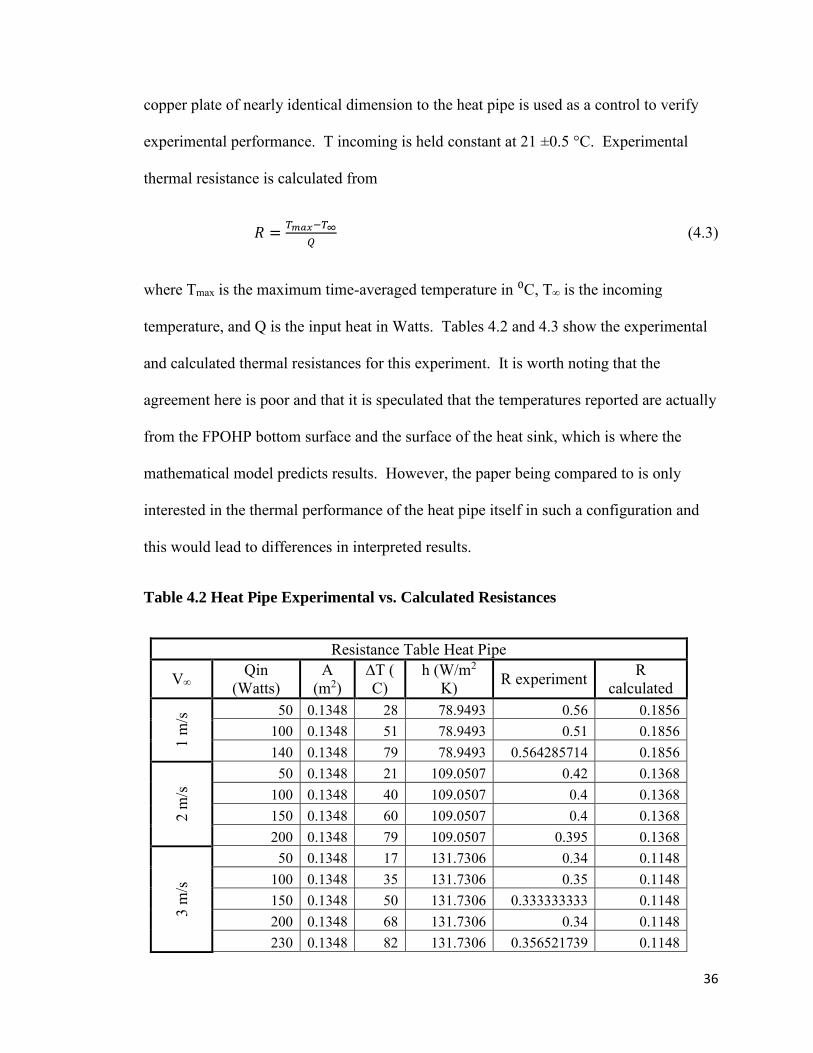
copper plate of nearly identical dimension to the heat pipe is used as a control to verify
experimental performance. T incoming is held constant at 21 ±0.5 °C. Experimental
thermal resistance is calculated from
𝑅 =𝑇𝑚𝑎𝑥−𝑇∞
𝑄 (4.3)
where Tmax is the maximum time-averaged temperature in ⁰C, T∞ is the incoming
temperature, and Q is the input heat in Watts. Tables 4.2 and 4.3 show the experimental
and calculated thermal resistances for this experiment. It is worth noting that the
agreement here is poor and that it is speculated that the temperatures reported are actually
from the FPOHP bottom surface and the surface of the heat sink, which is where the
mathematical model predicts results. However, the paper being compared to is only
interested in the thermal performance of the heat pipe itself in such a configuration and
this would lead to differences in interpreted results.
Table 4.2 Heat Pipe Experimental vs. Calculated Resistances
Resistance Table Heat Pipe
V∞ Qin (Watts)
A (m2)
∆T ( C)
h (W/m2 K) R experiment R
calculated
1 m
/s 50 0.1348 28 78.9493 0.56 0.1856
100 0.1348 51 78.9493 0.51 0.1856 140 0.1348 79 78.9493 0.564285714 0.1856
2 m
/s 50 0.1348 21 109.0507 0.42 0.1368 100 0.1348 40 109.0507 0.4 0.1368 150 0.1348 60 109.0507 0.4 0.1368 200 0.1348 79 109.0507 0.395 0.1368
3 m
/s
50 0.1348 17 131.7306 0.34 0.1148 100 0.1348 35 131.7306 0.35 0.1148 150 0.1348 50 131.7306 0.333333333 0.1148 200 0.1348 68 131.7306 0.34 0.1148 230 0.1348 82 131.7306 0.356521739 0.1148
37
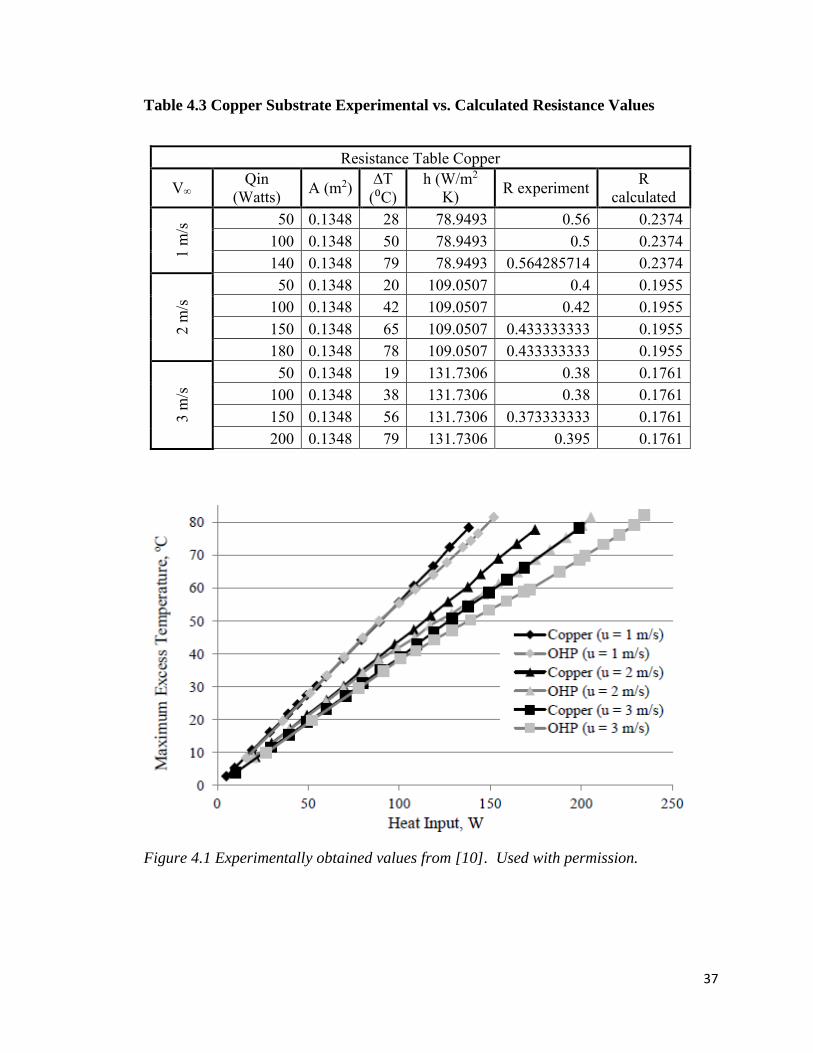
Table 4.3 Copper Substrate Experimental vs. Calculated Resistance Values
Resistance Table Copper
V∞ Qin (Watts) A (m2) ∆T
(⁰C) h (W/m2
K) R experiment R calculated
1 m
/s 50 0.1348 28 78.9493 0.56 0.2374
100 0.1348 50 78.9493 0.5 0.2374 140 0.1348 79 78.9493 0.564285714 0.2374
2 m
/s 50 0.1348 20 109.0507 0.4 0.1955
100 0.1348 42 109.0507 0.42 0.1955 150 0.1348 65 109.0507 0.433333333 0.1955 180 0.1348 78 109.0507 0.433333333 0.1955
3 m
/s 50 0.1348 19 131.7306 0.38 0.1761
100 0.1348 38 131.7306 0.38 0.1761 150 0.1348 56 131.7306 0.373333333 0.1761 200 0.1348 79 131.7306 0.395 0.1761
Figure 4.1 Experimentally obtained values from [10]. Used with permission.
38
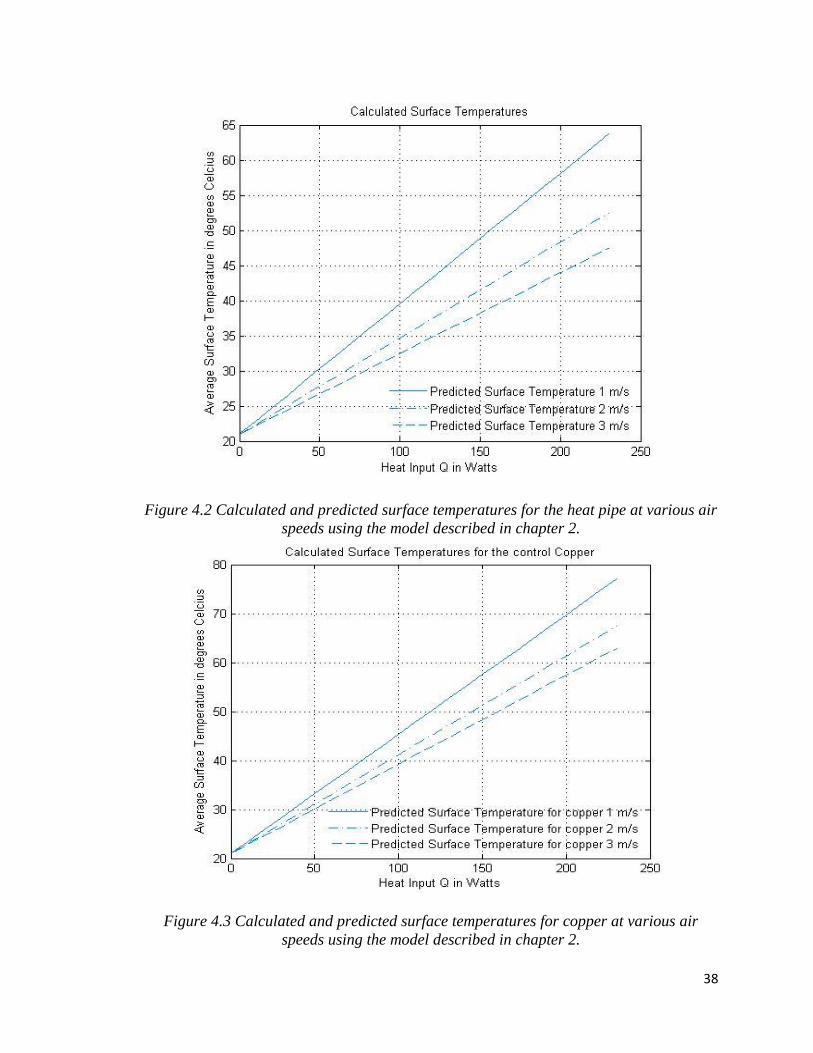
Figure 4.2 Calculated and predicted surface temperatures for the heat pipe at various air
speeds using the model described in chapter 2.
Figure 4.3 Calculated and predicted surface temperatures for copper at various air
speeds using the model described in chapter 2.
39
It is also worth noting that both Figure 4.2 and Figure 4.3 follow the trend very closely of
Figure 4.1. This shows validity of the model despite differences in approach to
interpreting data.
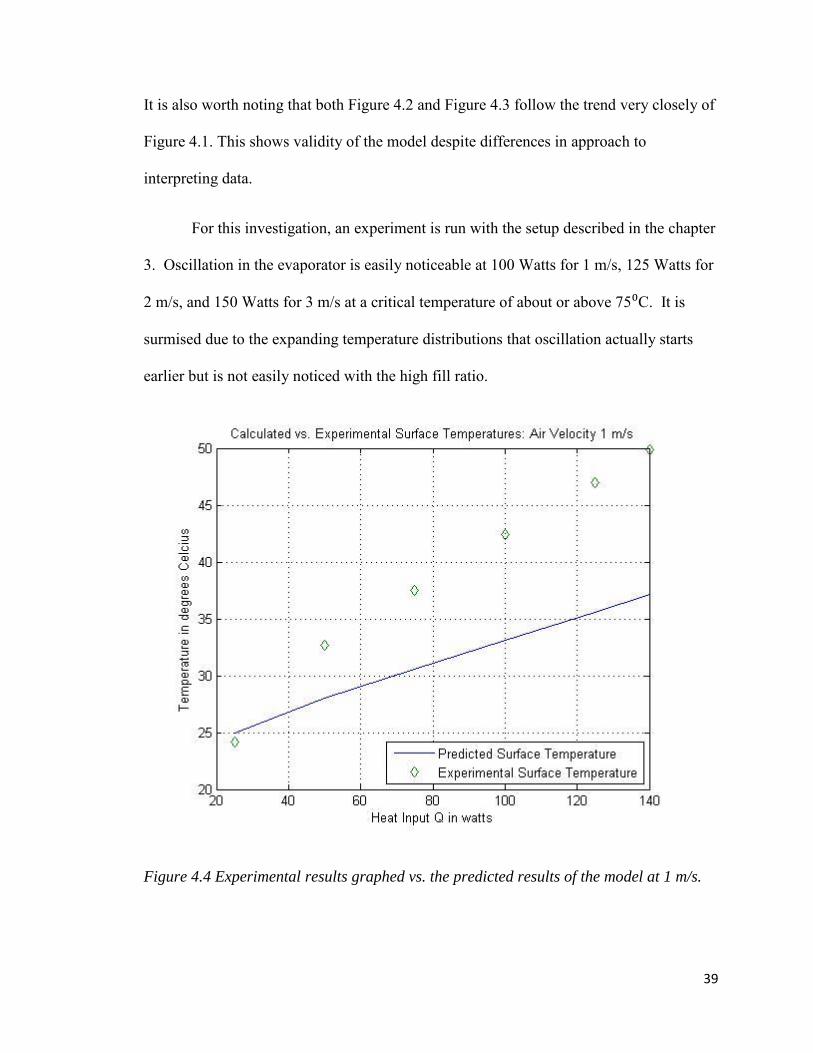
For this investigation, an experiment is run with the setup described in the chapter
3. Oscillation in the evaporator is easily noticeable at 100 Watts for 1 m/s, 125 Watts for
2 m/s, and 150 Watts for 3 m/s at a critical temperature of about or above 75⁰C. It is
surmised due to the expanding temperature distributions that oscillation actually starts
earlier but is not easily noticed with the high fill ratio.
Figure 4.4 Experimental results graphed vs. the predicted results of the model at 1 m/s.

40
Figure 4.5 Experimental results graphed vs. the predicted results of the model at 2 m/s.
Figure 4.6 Experimental results graphed vs. the predicted results of the model at 3 m/s.
41
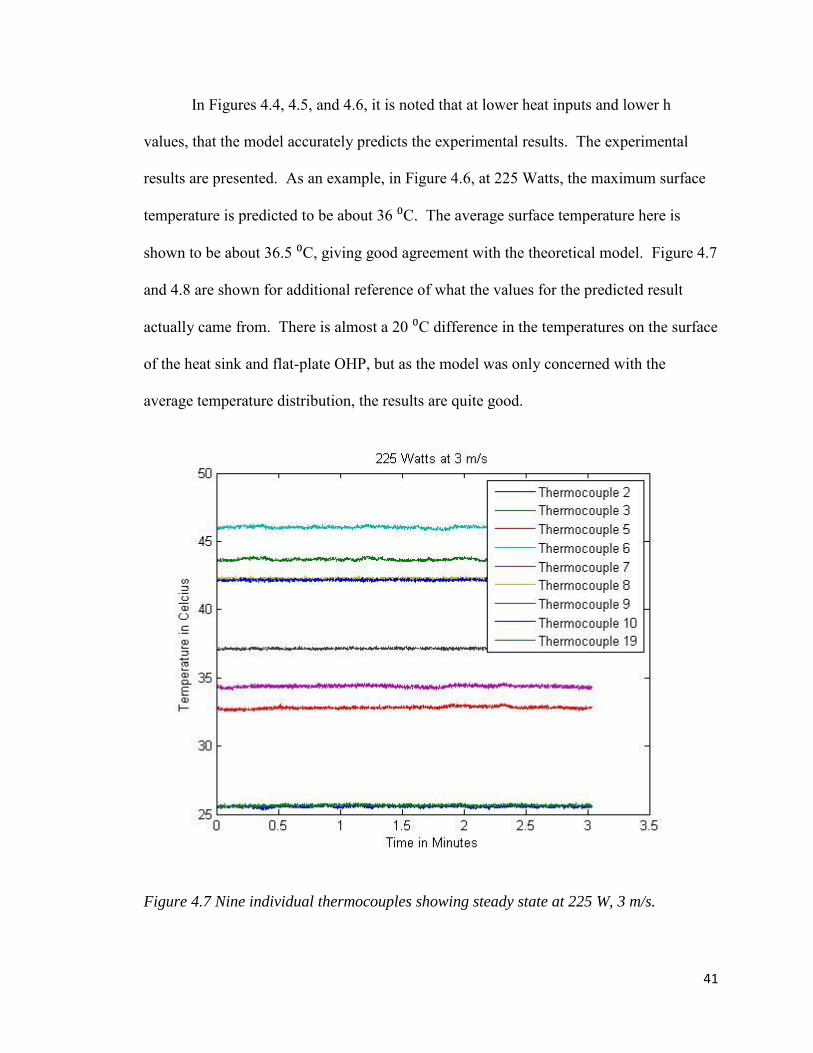
In Figures 4.4, 4.5, and 4.6, it is noted that at lower heat inputs and lower h
values, that the model accurately predicts the experimental results. The experimental
results are presented. As an example, in Figure 4.6, at 225 Watts, the maximum surface
temperature is predicted to be about 36 ⁰C. The average surface temperature here is
shown to be about 36.5 ⁰C, giving good agreement with the theoretical model. Figure 4.7
and 4.8 are shown for additional reference of what the values for the predicted result
actually came from. There is almost a 20 ⁰C difference in the temperatures on the surface
of the heat sink and flat-plate OHP, but as the model was only concerned with the
average temperature distribution, the results are quite good.
Figure 4.7 Nine individual thermocouples showing steady state at 225 W, 3 m/s.
42
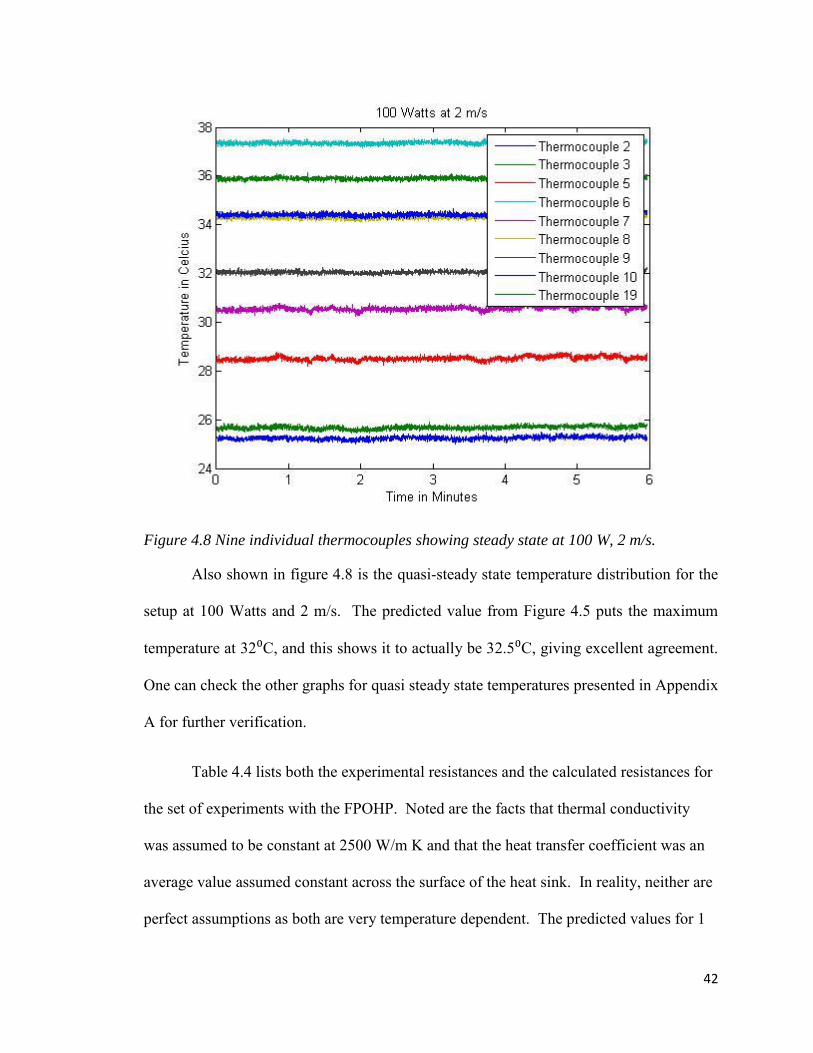
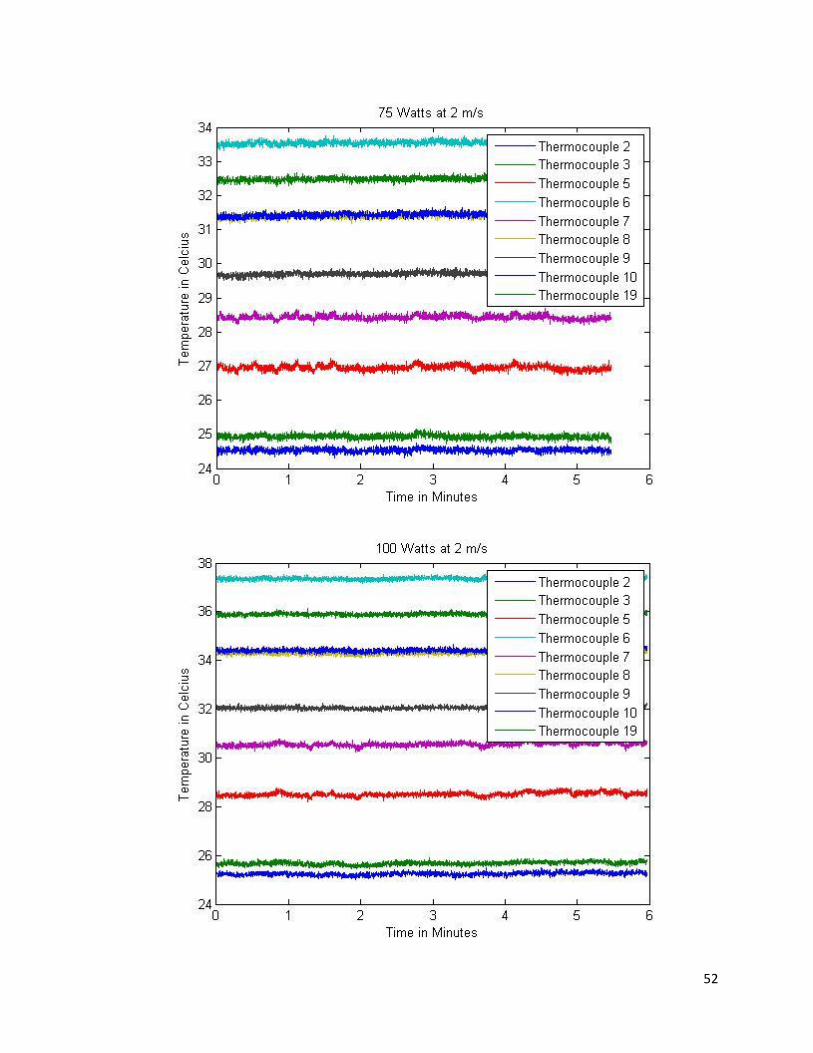
Figure 4.8 Nine individual thermocouples showing steady state at 100 W, 2 m/s.
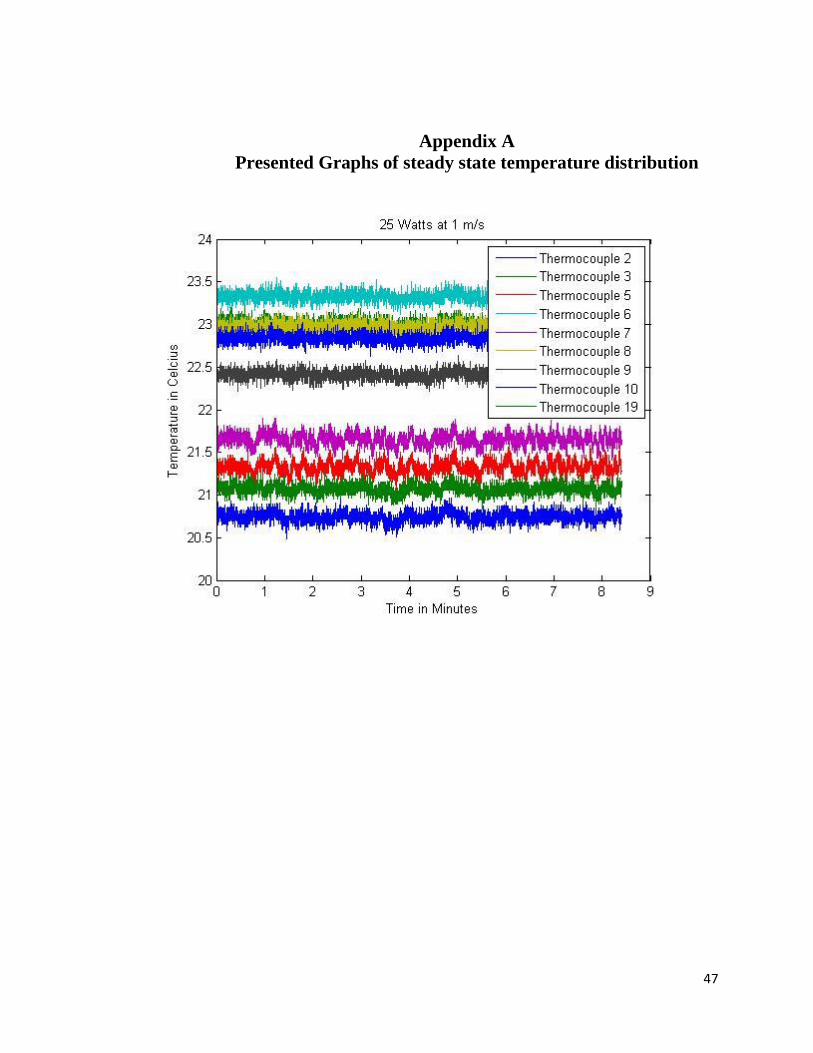
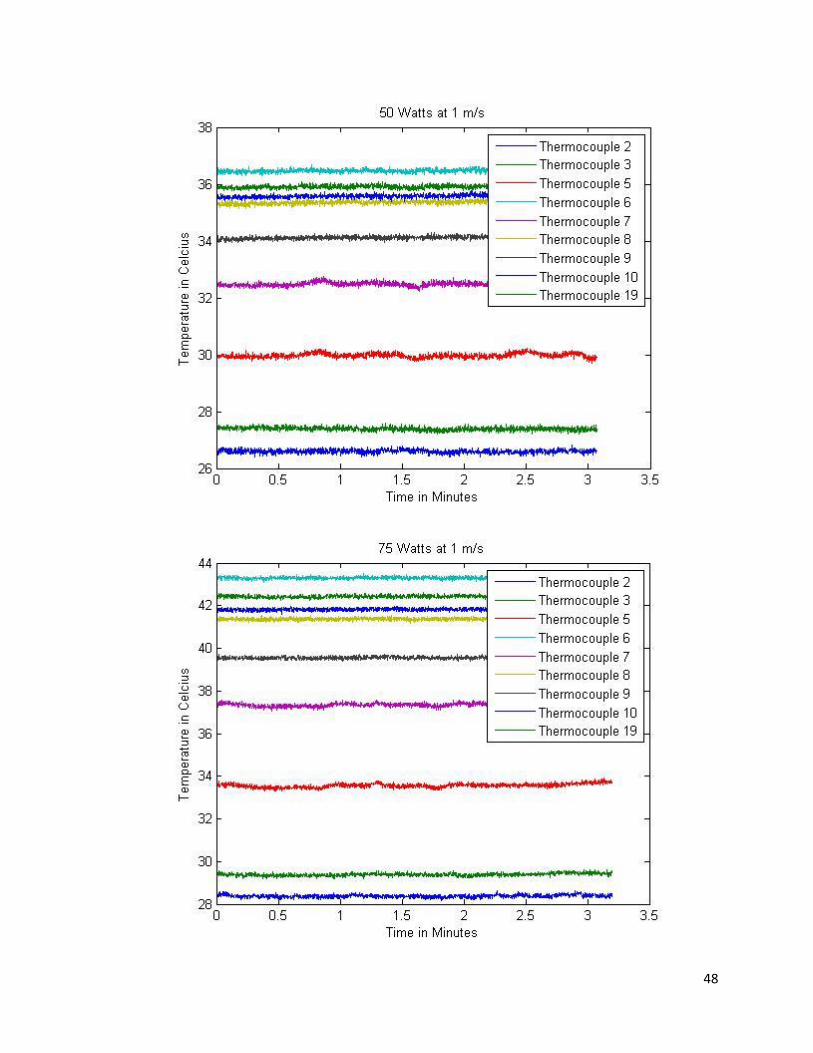
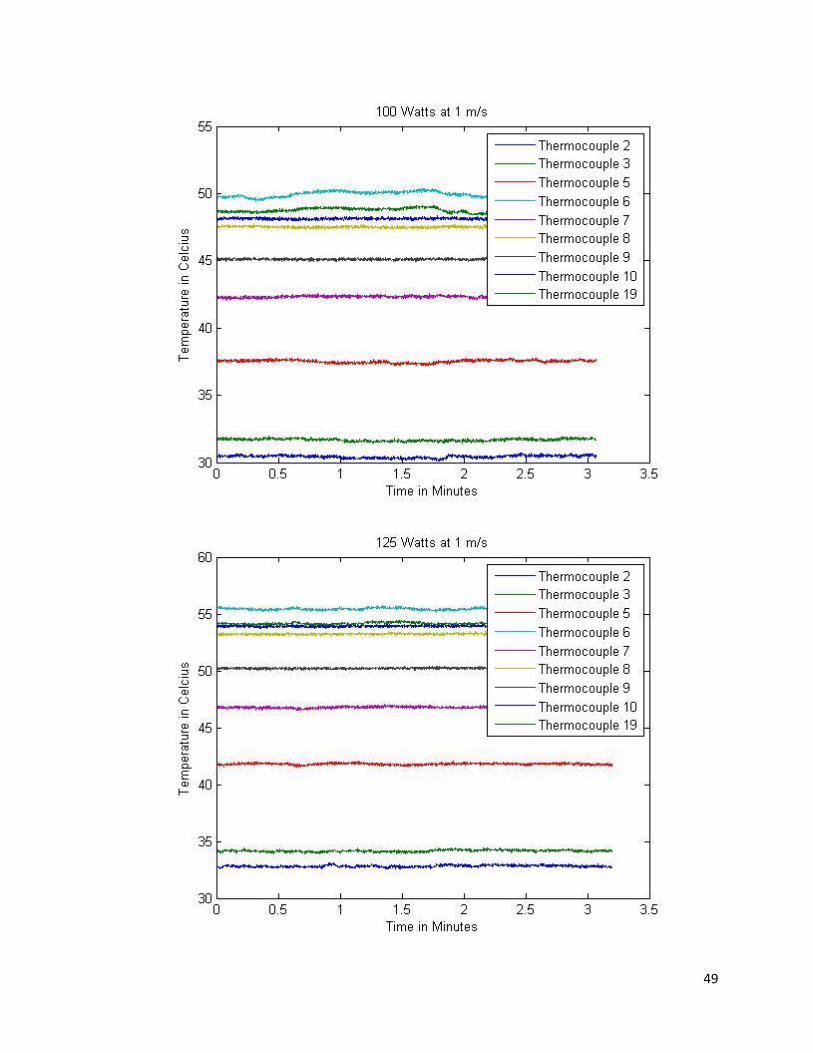
Also shown in figure 4.8 is the quasi-steady state temperature distribution for the
setup at 100 Watts and 2 m/s. The predicted value from Figure 4.5 puts the maximum
temperature at 32⁰C, and this shows it to actually be 32.5⁰C, giving excellent agreement.
One can check the other graphs for quasi steady state temperatures presented in Appendix
A for further verification.
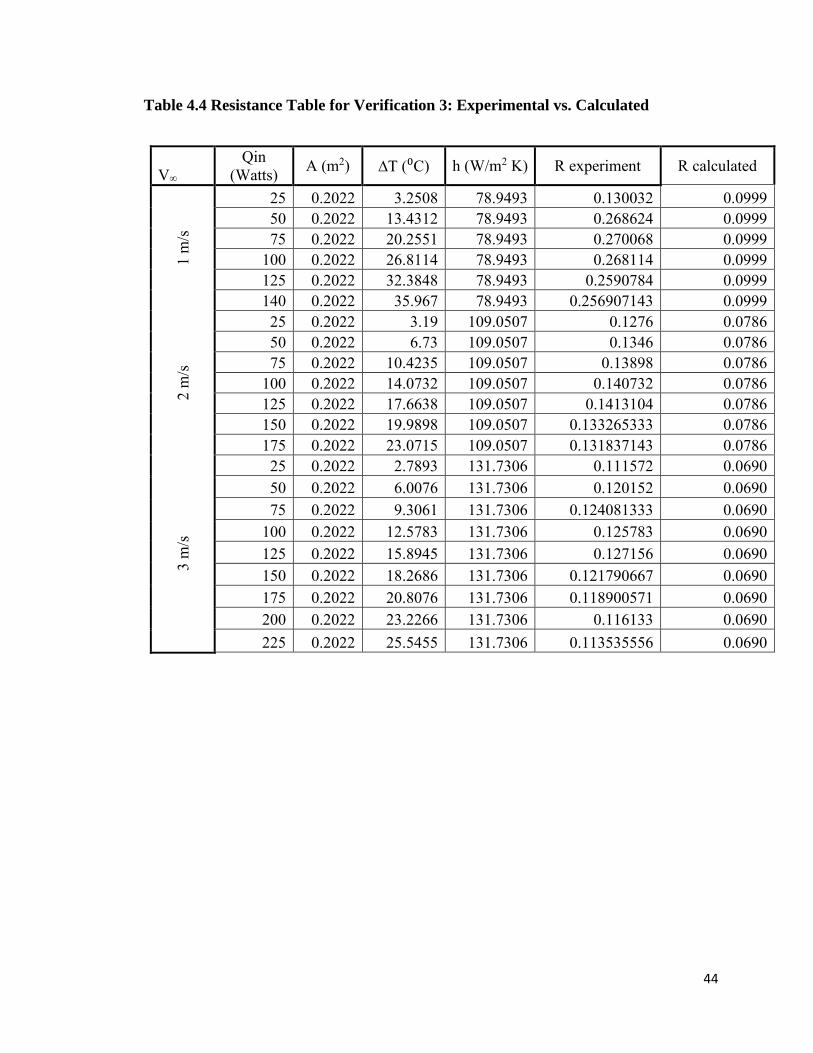
Table 4.4 lists both the experimental resistances and the calculated resistances for
the set of experiments with the FPOHP. Noted are the facts that thermal conductivity
was assumed to be constant at 2500 W/m K and that the heat transfer coefficient was an
average value assumed constant across the surface of the heat sink. In reality, neither are
perfect assumptions as both are very temperature dependent. The predicted values for 1
43
m/s were mostly off by a fair margin. However, when it starts oscillating at around 100
Watts, the resistances start decreasing, which would be consistent with an increasing
thermal conductivity associated with an oscillating heat pipe. The values predicted for 2
m/s and 3 m/s were actually quite accurate, particularly for such basic steady state
assumptions. It is noted that the h value associated with 1 m/s is high for a transitional
flow region and as such, under predicts the actual results considerably. The theoretical h-
value is definitely too high but still gives reasonably good results. The value of h
associated with 2 and 3 m/s flows is predicted quite well for turbulent flow regions and
gives good results. The calculated R values are calculated from equation 4.3, which is
only concerned with the maximum time averaged surface temperature.
44
Table 4.4 Resistance Table for Verification 3: Experimental vs. Calculated
V∞ Qin
(Watts) A (m2) ∆T (⁰C) h (W/m2 K) R experiment R calculated 1
m/s
25 0.2022 3.2508 78.9493 0.130032 0.0999 50 0.2022 13.4312 78.9493 0.268624 0.0999 75 0.2022 20.2551 78.9493 0.270068 0.0999
100 0.2022 26.8114 78.9493 0.268114 0.0999 125 0.2022 32.3848 78.9493 0.2590784 0.0999 140 0.2022 35.967 78.9493 0.256907143 0.0999
2 m
/s
25 0.2022 3.19 109.0507 0.1276 0.0786 50 0.2022 6.73 109.0507 0.1346 0.0786 75 0.2022 10.4235 109.0507 0.13898 0.0786
100 0.2022 14.0732 109.0507 0.140732 0.0786 125 0.2022 17.6638 109.0507 0.1413104 0.0786 150 0.2022 19.9898 109.0507 0.133265333 0.0786 175 0.2022 23.0715 109.0507 0.131837143 0.0786
3 m
/s
25 0.2022 2.7893 131.7306 0.111572 0.0690 50 0.2022 6.0076 131.7306 0.120152 0.0690 75 0.2022 9.3061 131.7306 0.124081333 0.0690
100 0.2022 12.5783 131.7306 0.125783 0.0690 125 0.2022 15.8945 131.7306 0.127156 0.0690 150 0.2022 18.2686 131.7306 0.121790667 0.0690 175 0.2022 20.8076 131.7306 0.118900571 0.0690 200 0.2022 23.2266 131.7306 0.116133 0.0690 225 0.2022 25.5455 131.7306 0.113535556 0.0690
45
Chapter 5
Conclusions
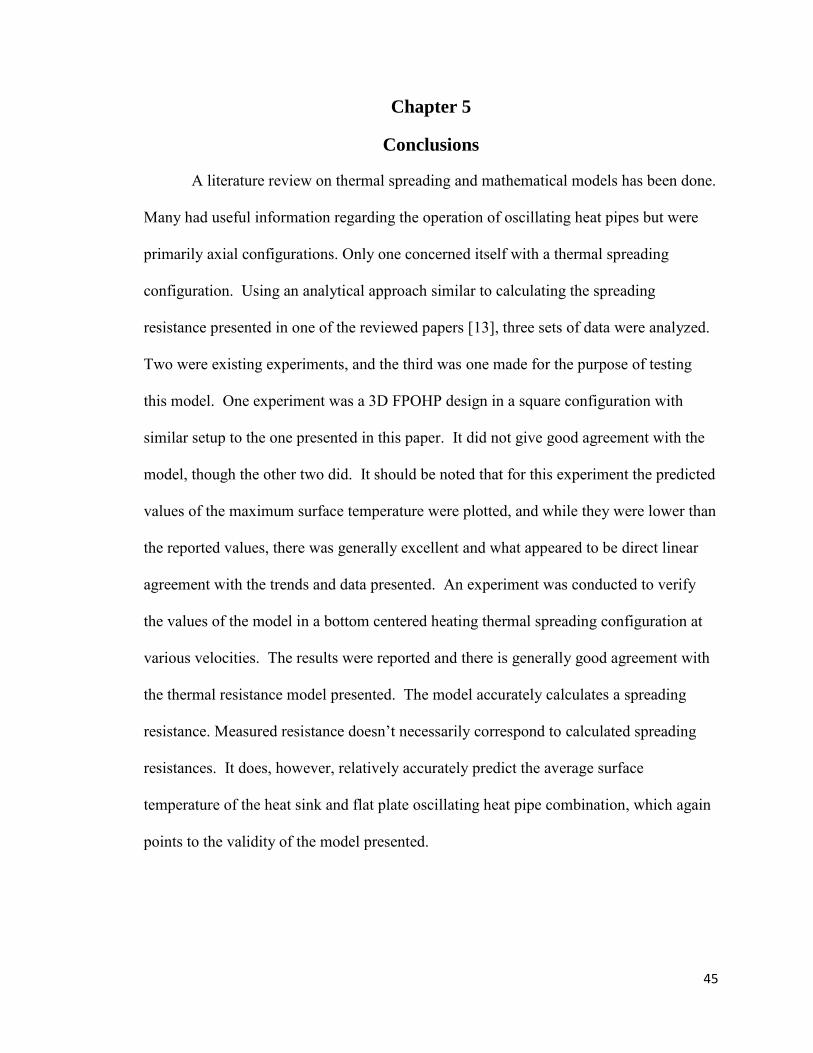
A literature review on thermal spreading and mathematical models has been done.
Many had useful information regarding the operation of oscillating heat pipes but were
primarily axial configurations. Only one concerned itself with a thermal spreading
configuration. Using an analytical approach similar to calculating the spreading
resistance presented in one of the reviewed papers [13], three sets of data were analyzed.
Two were existing experiments, and the third was one made for the purpose of testing
this model. One experiment was a 3D FPOHP design in a square configuration with
similar setup to the one presented in this paper. It did not give good agreement with the
model, though the other two did. It should be noted that for this experiment the predicted
values of the maximum surface temperature were plotted, and while they were lower than
the reported values, there was generally excellent and what appeared to be direct linear
agreement with the trends and data presented. An experiment was conducted to verify
the values of the model in a bottom centered heating thermal spreading configuration at
various velocities. The results were reported and there is generally good agreement with
the thermal resistance model presented. The model accurately calculates a spreading
resistance. Measured resistance doesn’t necessarily correspond to calculated spreading
resistances. It does, however, relatively accurately predict the average surface
temperature of the heat sink and flat plate oscillating heat pipe combination, which again
points to the validity of the model presented.

46
References
1. Akachi, H., 1990, “Structure of a Heat Pipe,” U.S. Patent 4,921,041. 2. Khandekar, S., Schneider M.,Schafer, R., Kulenovic R., Groll, M., 2002,
“Thermofluid Dynamic Study of Flat-Plate Closed-Loop Pulsating Heat Pipes,” Microscale Thermophysical Engineering. Vol.6, pp. 303-317.
3. Charoensawan, P., Khandekar. S., Groll, M., Terdtoon, P. 2003. “Closed loop pulsating heat pipes Part A: parametric experimental investigations”, Applied Thermal Engineering. Vol.23 . pp. 2009-2020.
4. Chien, K.H, Chen Y.R., Lin Y.T., Wang C.C., Yang K.S. “The Experimental Studies of Flat-Plate Closed-Loop Pulsating Heat Pipes,” International 10th Heat Pipe Symposium, p.p. 212-216.
5. Charoensawan, P., Terdtoon, P., 2007. “Thermal Performance Correlation of Horizontal Closed-Loop Oscillating Heat Pipes,” Electronics Packing Technology Conference, pp. 906-909.
6. Charoensawan, P., Terdtoon, P.,2008, “Thermal performance of horizontal closed-loop oscillating heat pipes,” Applied Thermal Engineering, Vol. 8, pp. 460-466.
7. Ma, H., Cheng, P., 2011,”A Mathematical Model of an Oscillating Heat Pipe,” Heat Transfer Engineering, Vol.32:11-12, pp. 1037-1046.
8. Chen, J.C., 1966, “Correlation for Boiling Heat Transfer to Saturated Fluids in Convective Flow,” Ind. Eng. Chem. Process Des. Dev., 5_3_,pp. 322-339.
9. Khandekar, S., Charoensawan, P.,Groll, M., Terdtoon,P., 2003, “Closed loop pulsating heat pipes Part B: visualization and semi-empirical modeling”, 18th National and 7th ISHMT-ASME Heat and Mass Transfer Conference, p.p. 1-12.
10. Khandekar, S., Groll, M. 2008, “Roadmap to Realistic Modeling of Closed Loop Pulsating Heat Pipes”, 9th International Heat Pipe Symposium, p.p. 1-12.
11. Thompson, S.M., Ma, Lu, H., Ma, H. B., 2013, “Experimental Investigation of Flat-Plate Oscillating Heat Pipe for Thermal Spreading Application,” 51st AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Paper No. AIAA 2013-0309, Grapevine, TX, USA|| DOI:10.2514/6.2013-309.
12. Zhang, Y.,Faghri, A., 2008,”Advances and Unsolved Issues in Pulsating Heat Pipes,” Heat Transfer Engineering, Vol. 29:1,pp.20-44.
13. Ellison, G. 2003,”Maximum Thermal Spreading Resistance for Rectangular Sources and Plates with Non-unity Aspect Ratios,” IEEE Transactions on Components and Packaging Technologies, Vol. 26:2, pp. 439-454.
14. Incropera, F. P., DeWitt, D. P., 2002, Introduction to Heat Transfer, 4th
ed., John Wiley & Sons, New York.
15. Beckwith, T. G., Marangoni, R.D, Lienhard, J.H., 1995, Mechanical Measurements, 5th ed., Addison Wesley Publishing Company, Massachussets
16. Laun, Fritz.,2013, “Experimental Investigation of Oscillating Heat Pipes,” Masters thesis, University of Missouri, Columbia Missouri
47
Appendix A
Presented Graphs of steady state temperature distribution
48
49

50

51
52

53

54
55

56

57
58

59

60
Appendix B
Matlab Code used for Calculation
Resist.m: Used to calculate resistance and spreading resist for all cases
function spread=resist(deltax,deltay,a,b,t,h,k) % deltax=length of heat source in meters % deltay=width of heat source in meters % a=length of heat sink in meters % b=width of heat sink in meters % t=thickness of thermal spreader in meters % h=heat transfer coefficient off of heat sink in Watts/meter squared % Kelvin alpha=deltax/a; beta=deltay/b; ro=a/b; tau=t/a; Biottau=h*t/k; psiu=ro*tau*sqrt(alpha*beta)*(1+1/Biottau); y=zeros(1,300); for i=1:300 y(i)=(ro/pi^2)*sqrt(beta/alpha)*(1/i^2)*sin(i*pi*alpha)*((1+((Biottau/(2*pi*tau*i))*tanh(2*i*pi*tau)))/((Biottau/(2*pi*tau*i))+tanh(2*i*pi*tau))); end x=zeros(1,300); for j=1:300 x(j)=(1/(ro*pi^2))*sqrt(alpha/beta)*(1/j^2)*sin(j*pi*beta*ro)*((1+((Biottau/(2*j*pi*ro*tau))*tanh(2*j*pi*ro*tau)))/((Biottau/(2*j*pi*ro*tau))+tanh(2*j*pi*ro*tau))); end xy=zeros(300,300); for L=1:300 for m=1:300 xy(L,m)=(4/(pi^2*sqrt(alpha*beta)))*1/(L*m)*sin(L*pi*alpha)*sin(m*pi*beta*ro)*(1+((Biottau/(2*pi*tau*sqrt(L^2+m^2*ro^2)))*tanh(2*pi*tau*sqrt(L^2+m^2*ro^2))))/((2*pi*sqrt(L^2+m^2*ro^2)*((Biottau/(2*pi*tau*sqrt(L^2+m^2*ro^2)))+tanh(2*pi*tau*sqrt(L^2+m^2*ro^2))))); end end psispread=sum(y)+sum(x)+sum(sum(xy)); spread=psispread/(k*sqrt(deltax*deltay))+psiu/(k*sqrt(deltax*deltay));
61
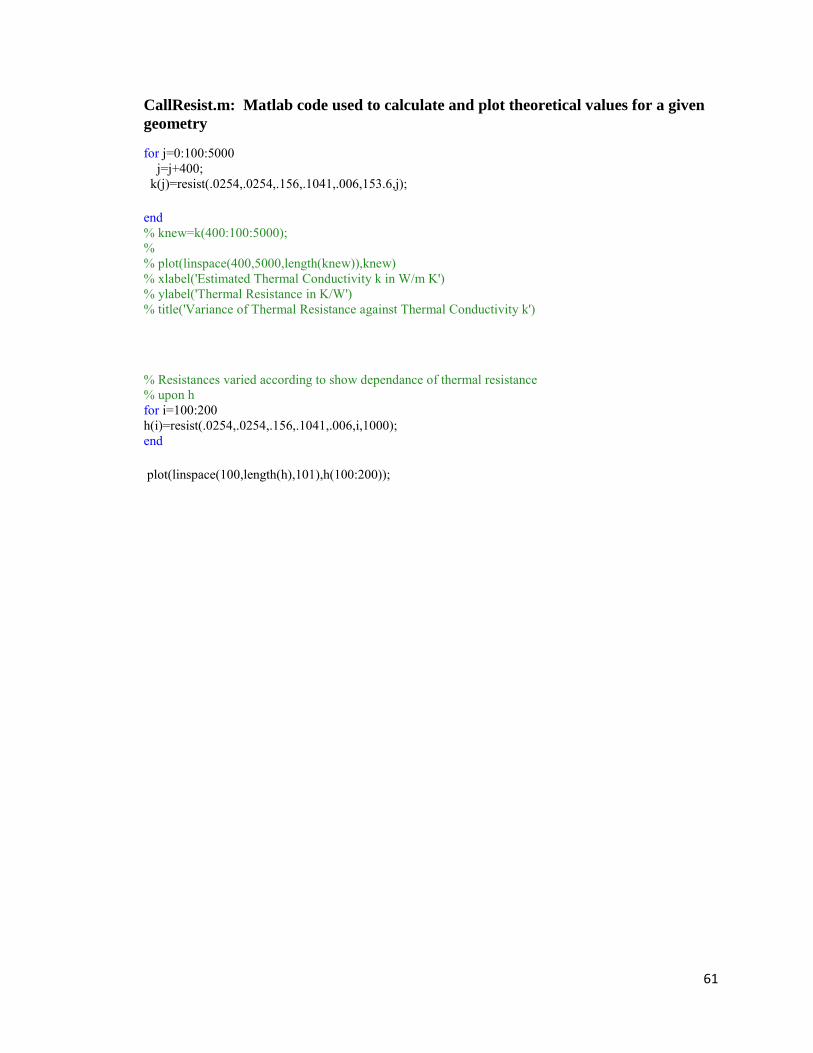
CallResist.m: Matlab code used to calculate and plot theoretical values for a given
geometry
for j=0:100:5000 j=j+400; k(j)=resist(.0254,.0254,.156,.1041,.006,153.6,j); end % knew=k(400:100:5000); % % plot(linspace(400,5000,length(knew)),knew) % xlabel('Estimated Thermal Conductivity k in W/m K') % ylabel('Thermal Resistance in K/W') % title('Variance of Thermal Resistance against Thermal Conductivity k') % Resistances varied according to show dependance of thermal resistance % upon h for i=100:200 h(i)=resist(.0254,.0254,.156,.1041,.006,i,1000); end plot(linspace(100,length(h),101),h(100:200));

62
CallResist2: Matlab code used to calculate and plot values for experimental data.
uinf1=1;uinf2=2;uinf3=3;%m/s Dh=.001778; %m mu=16.505*10^-6; %m^2/s Pr=0.712; k=0.026; %W/m^2 K Nf=1350;%number of fins in array L=0.156;%length of heat sink in meters W=0.1041;%width of heat sink in meters hfin=0.025146;%height of fin in meters kcu=401; %W/m K %calculate reynold's number approximating as a single isolated cylinder ReL1=uinf1*Dh/mu; ReL2=uinf2*Dh/mu; ReL3=uinf3*Dh/mu; %calculate nusselt number based on Reynold's number Nu1=.683*ReL1^(.466)*Pr^(1/3); Nu2=.683*ReL2^(.466)*Pr^(1/3); Nu3=.683*ReL3^(.466)*Pr^(1/3); %calculate average heat transfer coefficient h1=Nu1*k/Dh; h2=Nu2*k/Dh; h3=Nu3*k/Dh; % calculate m and from that, fin efficiency based on h value m1=((4*h1)/(kcu*Dh))^0.5; m2=((4*h2)/(kcu*Dh))^0.5; m3=((4*h3)/(kcu*Dh))^0.5; fineff1=tanh(m1*(hfin+Dh/4))/(m1*(hfin+Dh/4)); fineff2=tanh(m2*(hfin+Dh/4))/(m2*(hfin+Dh/4)); fineff3=tanh(m3*(hfin+Dh/4))/(m3*(hfin+Dh/4)); %Af and At, specifically the Area of the fin and the total surface area in %square meters Af=pi*Dh*hfin; At=Nf*Af+L*W-Nf*pi*(Dh/2)^2; %account for extra area of heat sink in a ratio and calculate heff. done by means of comparing heff to true h with fins. h1eff=h1*At*(1-(Nf*Af*(1-fineff1)/At))/(L*W); h2eff=h2*At*(1-(Nf*Af*(1-fineff2)/At))/(L*W); h3eff=h3*At*(1-(Nf*Af*(1-fineff3)/At))/(L*W); psi1=resist(.0254,.0254,.156,.1041,.006,h1eff,2500) psi2=resist(.0254,.0254,.156,.1041,.006,h2eff,2500) psi3=resist(.0254,.0254,.156,.1041,.006,h3eff,2500)
63
%average surface temperatures of the various speeds where 1,2,3 refer to %airflow velocity. T2=[24.1941 32.6607 37.4723 42.3767 46.9615 49.8911]; T3=[25.0538 27.1277 29.2697 31.5673 33.7109 35.8004 38.0060]; T4=[22.1506 23.9331 25.7937 27.6333 29.4945 31.2565 33.1006 34.8720 36.6375]; %incoming temperature T2in=[22.4179 23.0464 23.0586 23.0983 23.0833 23.1303]; T3in=[23.1211 23.1405 23.1203 23.3032 23.3260 23.3657 23.3631]; T4in=[20.5398 20.5113 20.5283 20.5247 20.5137 20.4914 20.5077 20.4751 20.4881]; %heat inputs Q2=[25 50 75 100 125 140]; Q3=[25 50 75 100 125 150 175]; Q4=[25 50 75 100 125 150 175 200 225]; % plot(Q2,TS2-T2,Q3,TS3-T3,Q4,TS4-T4) % plot(Q3,TS3-T3,'x') % plot(Q4,TS4-T4,'d') %calculate average surface temperatures from model. PT2=psi1*Q2;PT3=psi2*Q3;PT4=psi3*Q4; % % plot(Q2,PT2+T2in,Q2,T2,'d') % title('Calculated vs. Experimental Surface Temperatures: Air Velocity 1 m/s') % plot(Q3,PT3+T3in,Q3,T3,'d') % title('Calculated vs. Experimental Surface Temperatures: Air Velocity 2 m/s') plot(Q4,PT4+T4in,Q4,T4,'d') title('Calculated vs. Experimental Surface Temperatures: Air Velocity 3 m/s') grid on ylabel('Temperature in degrees Celcius') xlabel('Heat Input Q in watts') legend('Predicted Surface Temperature','Experimental Surface Temperature','Location','southeast') %maximum time averaged surface temperature Tmaxavg2=[25.6687 36.4776 43.3137 49.9097 55.4681 59.0973]; Tmaxavg3=[26.3111 29.8705 33.5438 37.3764 40.9898 43.3555 46.4346]; Tmaxavg4=[23.3291 26.5189 29.8344 33.1030 36.4082 38.7600 41.3153 43.7017 46.0336]; % calculate and plot heat input variable experimental thermal resistances T2resist=(Tmaxavg2-T2in)./Q2; T3resist=(Tmaxavg3-T3in)./Q3; T4resist=(Tmaxavg4-T4in)./Q4; (Tmaxavg2-T2in);
64
(Tmaxavg3-T3in); (Tmaxavg4-T4in); % %Preliminary results. Tinput is assumed to be 25 C % q=25:25:500; % dt1=psi1*q;dt2=psi2*q;dt3=psi3*q; % T=25*ones(1,length(q)); % plot(q,dt1+T,q,dt2+T,q,dt3+T) % % % title('Predicted Average Surface Temperature') % ylabel('Temperature in degrees Celcius') % xlabel('Heat Input Q in watts') % grid on % % legend('Heat Removal Air Velocity 1 m/s','Heat Removal Air Velocity 2 m/s','Heat Removal Air Velocity 3 m/s') % legend boxoff

65
Appendix C
Uncertainty Equations Presented in Order of Calculation
𝑉∞ =𝐽𝐼
𝐴𝑐𝑟𝑜𝑠𝑠𝑐𝑝,𝑎𝑖𝑟𝜌𝑎𝑖𝑟∆𝑇
𝜕𝑉∞
𝜕𝐽=
𝐼
𝐴𝑐𝑟𝑜𝑠𝑠𝑐𝑝,𝑎𝑖𝑟𝜌𝑎𝑖𝑟∆𝑇
𝜕𝑉∞
𝜕𝐼=
𝐽
𝐴𝑐𝑟𝑜𝑠𝑠𝑐𝑝,𝑎𝑖𝑟𝜌𝑎𝑖𝑟∆𝑇
𝜕𝑉∞
𝜕𝐴𝑐𝑟𝑜𝑠𝑠=
−𝐽𝐼
𝐴𝑐𝑟𝑜𝑠𝑠2 𝑐𝑝,𝑎𝑖𝑟𝜌𝑎𝑖𝑟∆𝑇
𝜕𝑉∞
𝜕∆𝑇=
−𝐽𝐼
𝐴𝑐𝑟𝑜𝑠𝑠𝑐𝑝,𝑎𝑖𝑟𝜌𝑎𝑖𝑟∆𝑇2
ℎ =𝑘
𝐷𝐶𝑃𝑟1/3 (
𝑉𝐷
𝜈)𝑛
𝜕ℎ
𝜕𝐷=
𝐶𝑘𝑛𝑃𝑟1/3𝑉
𝜈𝐷(𝑉𝐷
𝜈)𝑛−1
−𝑘𝐶𝑃𝑟1/3
𝐷2(𝑉𝐷
𝜈)𝑛
𝜕ℎ
𝜕𝑉∞=
𝐶𝑘𝑛𝑃𝑟1/3
𝜈(𝑉𝐷
𝜈)𝑛−1
ℎ𝑒𝑓𝑓 =ℎ
4𝑎𝑏(4𝑎𝑏 − 𝐷2𝑁𝜋 −
2𝐷𝑁𝜋 𝑇𝑎𝑛ℎ(2𝐻√ℎ
𝐷𝑘)
√ℎ
𝐷𝑘
)
𝜕ℎ𝑒𝑓𝑓
𝜕ℎ=
1
4𝑎𝑏(4𝑎𝑏 − 𝐷2𝑁𝜋𝑆𝑒𝑐ℎ2 (2𝐻√
ℎ
𝐷𝑘) +
𝐷𝑁𝜋𝑇𝑎𝑛ℎ(2𝐻√ℎ
𝐷𝑘)
√ℎ
𝐷𝑘
)
𝜕ℎ𝑒𝑓𝑓
𝜕𝑎=
𝐷ℎ𝑁𝜋(𝐷√ℎ
𝐷𝑘−2𝑇𝑎𝑛ℎ(2𝐻√
ℎ
𝐷𝑘))
4𝑎2𝑏√ℎ
𝐷𝑘
𝜕ℎ𝑒𝑓𝑓
𝜕𝑏=
𝐷ℎ𝑁𝜋(𝐷√ℎ
𝐷𝑘−2𝑇𝑎𝑛ℎ(2𝐻√
ℎ
𝐷𝑘))
4𝑎𝑏2√ℎ
𝐷𝑘
𝜕ℎ𝑒𝑓𝑓
𝜕𝐷=
−𝑁𝜋
4𝑎𝑏(2𝐷ℎ + 2ℎ𝐻𝑆𝑒𝑐ℎ2 (2𝐻√
ℎ
𝐷𝑘) − 3𝐷𝑘√
ℎ
𝐷𝑘𝑇𝑎𝑛ℎ (2𝐻√
ℎ
𝐷𝑘))
66
𝜕ℎ𝑒𝑓𝑓
𝜕𝐻=
𝐷ℎ𝑁𝜋𝑆𝑒𝑐ℎ2(2𝐻√ℎ
𝐷𝑘)
𝑎𝑏
𝑅𝑈 =1
√𝑏3𝑎(𝑡
𝑘+
1
ℎ𝑒𝑓𝑓)
𝜕𝑅𝑈
𝜕𝑎=
−𝑏3
2(𝑎𝑏3)3/2(𝑡
𝑘+
1
ℎ𝑒𝑓𝑓)
𝜕𝑅𝑈
𝜕𝑏=
−3𝑎𝑏2
2(𝑎𝑏3)3/2(𝑡
𝑘+
1
ℎ𝑒𝑓𝑓)
𝜕𝑅𝑈
𝜕𝑡=
1
𝑘√𝑎𝑏3
𝜕𝑅𝑈
𝜕ℎ𝑒𝑓𝑓=
−1
ℎ𝑒𝑓𝑓2 √𝑎𝑏3
𝜕𝑅𝑈
𝜕∆𝑥=
𝜕𝑅𝑈
𝜕∆𝑦= 0
𝑅𝑠𝑝 =√𝑎
3
𝑏3
𝑘∆𝑥𝜋2∑
1
𝑙2𝑆𝑖𝑛 (
𝑙𝜋∆𝑥
𝑎)(
1+ℎ𝑒𝑓𝑓𝑎
2𝑙𝜋𝑘𝑇𝑎𝑛ℎ(
2𝑙𝜋𝑡
𝑎)
ℎ𝑒𝑓𝑓𝑎
2𝑙𝜋𝑘+𝑇𝑎𝑛ℎ(
2𝑙𝜋𝑡
𝑎))1000
𝑙=1 +
√𝑏3
𝑎3
𝑘∆𝑦𝜋2∑
1
𝑚21000𝑚=1 𝑆𝑖𝑛 (
𝑚𝜋𝑎∆𝑦
𝑏2)(
1+ℎ𝑒𝑓𝑓
2𝑘𝑚𝜋𝑇𝑎𝑛ℎ(
2𝑚𝜋𝑡
𝑏)
ℎ𝑒𝑓𝑓
2𝑘𝑚𝜋+𝑇𝑎𝑛ℎ(
2𝑚𝜋𝑡
𝑏)) +
4√𝑎𝑏
𝑘𝜋2∆𝑥∆𝑦∑ ∑
1
𝑙𝑚1000𝑚=1 𝑆𝑖𝑛 (
𝑙𝜋∆𝑥
𝑎)1000
𝑙=1 𝑆𝑖𝑛 (𝑚𝜋𝑎∆𝑦
𝑏2) ∗
(
1+
ℎ𝑒𝑓𝑓𝑎
2𝜋𝑘√𝑙2+𝑎2𝑚2
𝑏2
𝑇𝑎𝑛ℎ(2𝜋𝑡
𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
(2𝜋𝑡
𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
(
ℎ𝑒𝑓𝑓𝑎
2𝜋𝑘√𝑙2+𝑎2𝑚2
𝑏2
+𝑇𝑎𝑛ℎ(2𝜋𝑡
𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
)
)
𝜕𝑅𝑠𝑝
𝜕𝑎=
1
𝑘𝜋2∆𝑥∑
3𝑎2
2𝑏3√𝑎3
𝑏3
1000𝑙=1
Sin(𝑙𝜋∆𝑥
𝑎)(1+
𝑎 ℎ𝑒𝑓𝑓 𝑇𝑎𝑛ℎ(2𝑙𝜋𝑡𝑎 )
2𝑘𝑙𝜋)
𝑙2(𝑎ℎ𝑒𝑓𝑓
2𝑘𝑙𝜋+𝑇𝑎𝑛ℎ(
2𝑙𝜋𝑡
𝑎))
+
√𝑎3
𝑏3[Sin (
𝑙𝜋∆𝑥
𝑎)(
ℎ𝑒𝑓𝑓 𝑇𝑎𝑛ℎ(2𝑙𝜋𝑡𝑎
)
2𝑘𝑙𝜋−ℎ𝑒𝑓𝑓 𝑡 𝑆𝑒𝑐ℎ
2(2𝑙𝜋𝑡𝑎
)
𝑎 𝑘
𝑙2(𝑎ℎ𝑒𝑓𝑓
2𝑘𝑙𝜋+𝑇𝑎𝑛ℎ(
2𝑙𝜋𝑡
𝑎))
) −

67
Sin (𝑙𝜋∆𝑥
𝑎)(ℎ𝑒𝑓𝑓
2𝑘𝑙𝜋−2𝑙𝜋𝑡 𝑆𝑒𝑐ℎ2(
2𝑙𝜋𝑡𝑎 )
𝑎2)(1+
𝑎ℎ𝑒𝑓𝑓𝑇𝑎𝑛ℎ(2𝑙𝜋𝑡𝑎 )
2𝑘𝑙𝜋)
𝑙2(𝑎 ℎ𝑒𝑓𝑓
2𝑘𝑙𝜋+𝑇𝑎𝑛ℎ(
2𝑙𝜋𝑡
𝑎))
2 − 𝜋∆𝑥𝐶𝑜𝑠 (𝑙𝜋∆𝑥
𝑎)
(1+𝑎 ℎ𝑒𝑓𝑓 𝑇𝑎𝑛ℎ(
2𝑙𝜋𝑡𝑎 )
2𝑘𝑙𝜋)
𝑎2𝑙(𝑎 ℎ𝑒𝑓𝑓
2𝑘𝑙𝜋+𝑇𝑎𝑛ℎ(
2𝑙𝜋𝑡
𝑎))
] +
1
𝑘𝜋2∆𝑦∑ [√
𝑏3
𝑎3𝜋∆𝑦𝐶𝑜𝑠 (
𝑎𝑚𝜋∆𝑦
𝑏2)
(1+𝑏ℎ𝑒𝑓𝑓𝑇𝑎𝑛ℎ(
2𝑚𝜋𝑡𝑏
)
2𝑘𝑚𝜋)
𝑏2𝑚(𝑏ℎ𝑒𝑓𝑓
2𝑘𝑚𝜋+𝑇𝑎𝑛ℎ(
2𝑚𝜋𝑡
𝑏))
−1000𝑚=1
3𝑏3
2𝑎4√𝑏3
𝑎3
𝑆𝑖𝑛 (𝑎𝑚𝜋∆𝑦
𝑏2)
(1+𝑏ℎ𝑒𝑓𝑓𝑇𝑎𝑛ℎ(
2𝑚𝜋𝑡𝑏
)
2𝑘𝑚𝜋)
𝑚2(𝑏ℎ𝑒𝑓𝑓
2𝑘𝑚𝜋+𝑇𝑎𝑛ℎ(
2𝑚𝜋𝑡
𝑏))
] +
1
𝑘𝜋2∆𝑥∆𝑦
∑ ∑
[ 2𝑏
√𝑎𝑏𝑎 Sin(
𝑙𝜋∆𝑥
𝑎)𝑆𝑖𝑛(
𝑎𝑚𝜋∆𝑦
𝑏2)
(
1+
𝑎 ℎ𝑒𝑓𝑓 𝑇𝑎𝑛ℎ(2𝜋𝑡𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
2𝑘𝜋√𝑙2+𝑎2𝑚2
𝑏2)
2𝑙𝑚𝜋𝑡√𝑙2+𝑎2𝑚2
𝑏2
(
𝑎ℎ𝑒𝑓𝑓
2𝑘𝜋√𝑙2+𝑎2𝑚2
𝑏2
+𝑇𝑎𝑛ℎ(2𝜋𝑡
𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
)
]
1000𝑚=1 +1000
𝑙=1
[
4√𝑎𝑏
2𝑙𝑚𝜋𝑡√𝑙2+𝑎2𝑚2
𝑏2
(
𝑎ℎ𝑒𝑓𝑓
2𝑘𝜋√𝑙2+𝑎2𝑚2
𝑏2
+𝑇𝑎𝑛ℎ(2𝜋𝑡
𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
)
(
𝑎 Sin (𝑙𝜋∆𝑥
𝑎) 𝑆𝑖𝑛 (
𝑎𝑚𝜋∆𝑦
𝑏2)
(
𝑎ℎ𝑒𝑓𝑓
(
2𝑚2𝜋𝑡
𝑏2√𝑙2+𝑎2𝑚2
𝑏2
−
2𝜋𝑡√𝑙2+𝑎2𝑚2
𝑏2
𝑎2
)
𝑆𝑒𝑐ℎ2(
2𝜋𝑡
𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
2𝑘𝜋√𝑙2+𝑎2𝑚2
𝑏2
−𝑎2ℎ𝑒𝑓𝑓𝑚
2𝑇𝑎𝑛ℎ(2𝜋𝑡
𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
2𝑏2𝑘𝜋(𝑙2+𝑎2𝑚2
𝑏2)
32
+
ℎ𝑒𝑓𝑓𝑇𝑎𝑛ℎ(2𝜋𝑡
𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
2𝑘𝜋√𝑙2+𝑎2𝑚2
𝑏2 )
)
]
−
[
𝑎
(
2𝑙𝑚𝜋𝑡√𝑙2+
𝑎2𝑚2
𝑏2
(
𝑎ℎ𝑒𝑓𝑓
2𝑘𝜋√𝑙2+𝑎2𝑚2
𝑏2
+𝑇𝑎𝑛ℎ(2𝜋𝑡
𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
)
)
2
(
−
𝑎2ℎ𝑒𝑓𝑓𝑚2
2𝑏2𝑘𝜋(𝑙2+𝑎2𝑚2
𝑏2)
32
+
68
ℎ𝑒𝑓𝑓
2𝑘𝜋√𝑙2+𝑎2𝑚2
𝑏2
((2𝑚2𝜋𝑡
𝑏2√𝑙2+𝑎2𝑚2
𝑏2
−
2𝜋𝑡√𝑙2+𝑎2𝑚2
𝑏2
𝑎2)𝑆𝑒𝑐ℎ2 (
2𝜋𝑡
𝑎√𝑙2 +
𝑎2𝑚2
𝑏2))
)
Sin (
𝑙𝜋∆𝑥
𝑎) 𝑆𝑖𝑛 (
𝑎𝑚𝜋∆𝑦
𝑏2)(1 +
𝑎 ℎ𝑒𝑓𝑓 𝑇𝑎𝑛ℎ(2𝜋𝑡
𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
2𝑘𝜋√𝑙2+𝑎2𝑚2
𝑏2
)
]
+
(
𝑎∆𝑦𝐶𝑜𝑠(𝑎𝑚𝜋∆𝑦
𝑏2)𝑆𝑖𝑛(
𝑙𝜋∆𝑥
𝑎)
(
1+
𝑎 ℎ𝑒𝑓𝑓 𝑇𝑎𝑛ℎ(2𝜋𝑡𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
2𝑘𝜋√𝑙2+𝑎2𝑚2
𝑏2)
2𝑏2𝑙𝑡√𝑙2+𝑎2𝑚2
𝑏2
(
𝑎ℎ𝑒𝑓𝑓
2𝑘𝜋√𝑙2+𝑎2𝑚2
𝑏2
+𝑇𝑎𝑛ℎ(2𝜋𝑡
𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
)
)
−
(
∆𝑥𝑆𝑖𝑛(𝑎𝑚𝜋∆𝑦
𝑏2)𝐶𝑜𝑠(
𝑙𝜋∆𝑥
𝑎)
(
1+
𝑎 ℎ𝑒𝑓𝑓 𝑇𝑎𝑛ℎ(2𝜋𝑡𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
2𝑘𝜋√𝑙2+𝑎2𝑚2
𝑏2)
2𝑎𝑚𝑡√𝑙2+𝑎2𝑚2
𝑏2
(
𝑎ℎ𝑒𝑓𝑓
2𝑘𝜋√𝑙2+𝑎2𝑚2
𝑏2
+𝑇𝑎𝑛ℎ(2𝜋𝑡
𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
)
)
−
(
𝑎2𝑚Sin(
𝑙𝜋∆𝑥
𝑎)𝑆𝑖𝑛(
𝑎𝑚𝜋∆𝑦
𝑏2)
(
1+
𝑎 ℎ𝑒𝑓𝑓 𝑇𝑎𝑛ℎ(2𝜋𝑡𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
2𝑘𝜋√𝑙2+𝑎2𝑚2
𝑏2)
2𝑏2𝑙𝜋𝑡(𝑙2+𝑎2𝑚2
𝑏2)
32
(
𝑎ℎ𝑒𝑓𝑓
2𝑘𝜋√𝑙2+𝑎2𝑚2
𝑏2
+𝑇𝑎𝑛ℎ(2𝜋𝑡
𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
)
)
+
(
Sin(
𝑙𝜋∆𝑥
𝑎)𝑆𝑖𝑛(
𝑎𝑚𝜋∆𝑦
𝑏2)
(
1+
𝑎 ℎ𝑒𝑓𝑓 𝑇𝑎𝑛ℎ(2𝜋𝑡𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
2𝑘𝜋√𝑙2+𝑎2𝑚2
𝑏2)
2𝑙𝑚𝜋𝑡(𝑙2+𝑎2𝑚2
𝑏2)3/2
(
𝑎ℎ𝑒𝑓𝑓
2𝑘𝜋√𝑙2+𝑎2𝑚2
𝑏2
+𝑇𝑎𝑛ℎ(2𝜋𝑡
𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
)
)

69
𝜕𝑅𝑠𝑝
𝜕𝑏=
3𝑎3
2𝑏4𝑘𝜋2∆𝑥√𝑎3
𝑏3
∑ 𝑆𝑖𝑛 (𝑙𝜋∆𝑥
𝑎)(1+
𝑎 ℎ𝑒𝑓𝑓 𝑇𝑎𝑛ℎ(2𝑙𝜋𝑡𝑎 )
2𝑘𝑙𝜋)
𝑙2(𝑎ℎ𝑒𝑓𝑓
2𝑘𝑙𝜋+𝑇𝑎𝑛ℎ(
2𝑙𝜋𝑡
𝑎))
+1000𝑙=1
1
𝑘𝜋2∆y
[
∑3𝑏2
2𝑎3√𝑏3
𝑎3
𝑆𝑖𝑛 (𝑎𝑚𝜋∆𝑦
𝑏2) ∗1000
𝑚=1
(1+𝑏ℎ𝑒𝑓𝑓𝑇𝑎𝑛ℎ(
2𝑚𝜋𝑡𝑏
)
2𝑘𝑚𝜋)
𝑚2(𝑏ℎ𝑒𝑓𝑓
2𝑘𝑚𝜋+𝑇𝑎𝑛ℎ(
2𝑚𝜋𝑡
𝑏))
+
√𝑏3
𝑎3[𝑆𝑖𝑛 (
𝑎𝑚𝜋∆𝑦
𝑏2)(−
ℎ𝑒𝑓𝑓𝑡𝑆𝑒𝑐ℎ2(2𝑚𝜋𝑡𝑏
)
𝑏𝑘+ℎ𝑒𝑓𝑓𝑇𝑎𝑛ℎ(
2𝑚𝜋𝑡𝑏
)
2𝑘𝑚𝜋)
𝑚2(𝑏ℎ𝑒𝑓𝑓
2𝑘𝑚𝜋+𝑇𝑎𝑛ℎ(
2𝑚𝜋𝑡
𝑏))
−
𝑆𝑖𝑛 (𝑎𝑚𝜋∆𝑦
𝑏2)(1+
𝑏ℎ𝑒𝑓𝑓𝑇𝑎𝑛ℎ(2𝑚𝜋𝑡𝑏
)
2𝑘𝑚𝜋)(
ℎ𝑒𝑓𝑓
2𝑘𝑚𝜋−2𝑚𝜋𝑡𝑆𝑒𝑐ℎ2(
2𝑚𝜋𝑡𝑏
)
𝑏2)
𝑚2(𝑏ℎ𝑒𝑓𝑓
2𝑘𝑚𝜋+𝑇𝑎𝑛ℎ(
2𝑚𝜋𝑡
𝑏))
2 −
2𝑎𝜋∆𝑦𝐶𝑜𝑠 (𝑎𝑚𝜋∆𝑦
𝑏2)(1+
𝑏ℎ𝑒𝑓𝑓𝑇𝑎𝑛ℎ(2𝑚𝜋𝑡𝑏
)
2𝑘𝑚𝜋)
𝑚(𝑏ℎ𝑒𝑓𝑓
2𝑘𝑚𝜋+𝑇𝑎𝑛ℎ(
2𝑚𝜋𝑡
𝑏))
]
]
+
1
𝑘𝜋2∆𝑥∆𝑦∑
∑2𝑎
√𝑎𝑏a Sin (
𝑙𝜋∆𝑥
𝑎)𝑆𝑖𝑛 (
𝑎𝑚𝜋∆𝑦
𝑏2) (
1+
𝑎 ℎ𝑒𝑓𝑓 𝑇𝑎𝑛ℎ(2𝜋𝑡𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
2𝑘𝜋√𝑙2+𝑎2𝑚2
𝑏2)
2𝑙𝑚𝜋𝑡√𝑙2+𝑎2𝑚2
𝑏2
(
𝑎ℎ𝑒𝑓𝑓
2𝑘𝜋√𝑙2+𝑎2𝑚2
𝑏2
+𝑇𝑎𝑛ℎ(2𝜋𝑡
𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
)
1000𝑚=1
1000𝑙=1 +
4√𝑎𝑏
[
a Sin (𝑙𝜋∆𝑥
𝑎)𝑆𝑖𝑛 (
𝑎𝑚𝜋∆𝑦
𝑏2)(
−
𝑎2ℎ𝑒𝑓𝑓𝑚2𝑡𝑆𝑒𝑐ℎ2(
2𝜋𝑡𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
𝑏3𝑘(𝑙2+𝑎2𝑚2
𝑏2)
+
𝑎2ℎ𝑒𝑓𝑓𝑚2𝑇𝑎𝑛ℎ(
2𝜋𝑡𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
2𝑏3𝑘𝜋(𝑙2+𝑎2𝑚2
𝑏2)
3/2
)
2𝑙𝑚𝜋𝑡√𝑙2+𝑎2𝑚2
𝑏2
(
𝑎ℎ𝑒𝑓𝑓
2𝑘𝜋√𝑙2+𝑎2𝑚2
𝑏2
+𝑇𝑎𝑛ℎ(2𝜋𝑡
𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
)
−
a Sin (𝑙𝜋∆𝑥
𝑎)𝑆𝑖𝑛 (
𝑎𝑚𝜋∆𝑦
𝑏2)(
1+
𝑎 ℎ𝑒𝑓𝑓 𝑇𝑎𝑛ℎ(2𝜋𝑡𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
2𝑘𝜋√𝑙2+𝑎2𝑚2
𝑏2)
(
𝑎3ℎ𝑒𝑓𝑓𝑚
2
2𝑏3𝑘𝜋(𝑙2+𝑎2𝑚2
𝑏2)
32
−
2𝑎𝑚2𝜋𝑡𝑆𝑒𝑐ℎ2(2𝜋𝑡𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
𝑏3(𝑙2+𝑎2𝑚2
𝑏2)
)
2𝑙𝑚𝜋𝑡√𝑙2+𝑎2𝑚2
𝑏2
(
𝑎ℎ𝑒𝑓𝑓
2𝑘𝜋√𝑙2+𝑎2𝑚2
𝑏2
+𝑇𝑎𝑛ℎ(2𝜋𝑡
𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
)
2 −

70
𝑎2∆𝑦 Sin (𝑙𝜋∆𝑥
𝑎)𝐶𝑜𝑠 (
𝑎𝑚𝜋∆𝑦
𝑏2) (
1+
𝑎 ℎ𝑒𝑓𝑓 𝑇𝑎𝑛ℎ(2𝜋𝑡𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
2𝑘𝜋√𝑙2+𝑎2𝑚2
𝑏2)
𝑏3𝑙𝑡√𝑙2+𝑎2𝑚2
𝑏2
(
𝑎ℎ𝑒𝑓𝑓
2𝑘𝜋√𝑙2+𝑎2𝑚2
𝑏2
+𝑇𝑎𝑛ℎ(2𝜋𝑡
𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
)
+
𝑎3𝑚Sin (𝑙𝜋∆𝑥
𝑎)𝑆𝑖𝑛 (
𝑎𝑚𝜋∆𝑦
𝑏2) (
1+
𝑎 ℎ𝑒𝑓𝑓 𝑇𝑎𝑛ℎ(2𝜋𝑡𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
2𝑘𝜋√𝑙2+𝑎2𝑚2
𝑏2)
2𝑏3𝑙𝜋𝑡(𝑙2+𝑎2𝑚2
𝑏2)3/2
(
𝑎ℎ𝑒𝑓𝑓
2𝑘𝜋√𝑙2+𝑎2𝑚2
𝑏2
+𝑇𝑎𝑛ℎ(2𝜋𝑡
𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
)
]
𝜕𝑅𝑠𝑝
𝜕𝑡=
√𝑎3
𝑏3
𝑘𝜋2∆𝑥∑ Sin (
𝑙𝜋∆𝑥
𝑎) ∗(
ℎ𝑒𝑓𝑓𝑆𝑒𝑐ℎ2(2𝑙𝜋𝑡
𝑎)
𝑘𝑙2(𝑎ℎ𝑒𝑓𝑓
2𝑘𝑙𝜋+𝑇𝑎𝑛ℎ(
2𝑙𝜋𝑡
𝑎))
−2𝜋𝑆𝑒𝑐ℎ2(
2𝑙𝜋𝑡
𝑎)(1+
𝑎 ℎ𝑒𝑓𝑓 𝑇𝑎𝑛ℎ(2𝑙𝜋𝑡𝑎 )
2𝑘𝑙𝜋)
𝑎𝑙(𝑎ℎ𝑒𝑓𝑓
2𝑘𝑙𝜋+𝑇𝑎𝑛ℎ(
2𝑙𝜋𝑡
𝑎))
2 )+1000𝑙=1
√𝑏3
𝑎3
𝑘𝜋2∆𝑦∑ 𝑆𝑖𝑛 (
𝑎𝑚𝜋∆𝑦
𝑏2) ∗ (
ℎ𝑒𝑓𝑓𝑆𝑒𝑐ℎ2(2𝑚𝜋𝑡
𝑏)
𝑘𝑚2(𝑏ℎ𝑒𝑓𝑓
2𝑘𝑚𝜋+𝑇𝑎𝑛ℎ(
2𝑚𝜋𝑡
𝑏))
−2𝜋𝑆𝑒𝑐ℎ2(
2𝑚𝜋𝑡
𝑏)(1+
𝑏ℎ𝑒𝑓𝑓𝑇𝑎𝑛ℎ(2𝑚𝜋𝑡𝑏
)
2𝑘𝑚𝜋)
𝑏𝑚(𝑏ℎ𝑒𝑓𝑓
2𝑘𝑚𝜋+𝑇𝑎𝑛ℎ(
2𝑚𝜋𝑡
𝑏))
2 )1000𝑚=1 +
4√𝑎𝑏
𝑘𝜋∆𝑥∆𝑦∑ ∑ Sin (
𝑙𝜋∆𝑥
𝑎)𝑆𝑖𝑛 (
𝑎𝑚𝜋∆𝑦
𝑏2) ∗1000
𝑚=11000𝑙=1
(
𝑎ℎ𝑒𝑓𝑓𝑆𝑒𝑐ℎ2(2𝜋𝑡
𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
2𝑘𝑙𝑚𝜋𝑡√𝑙2+𝑎2𝑚2
𝑏2
(
𝑎ℎ𝑒𝑓𝑓
2𝑘𝜋√𝑙2+𝑎2𝑚2
𝑏2
+𝑇𝑎𝑛ℎ(2𝜋𝑡
𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
)
−
𝑆𝑒𝑐ℎ2(2𝜋𝑡
𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
(
1+
𝑎 ℎ𝑒𝑓𝑓 𝑇𝑎𝑛ℎ(2𝜋𝑡𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
2𝑘𝜋√𝑙2+𝑎2𝑚2
𝑏2)
𝑙𝑚𝑡
(
𝑎ℎ𝑒𝑓𝑓
2𝑘𝜋√𝑙2+𝑎2𝑚2
𝑏2
+𝑇𝑎𝑛ℎ(2𝜋𝑡
𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
)
2 −
𝑎
(
1+
𝑎 ℎ𝑒𝑓𝑓 𝑇𝑎𝑛ℎ(2𝜋𝑡𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
2𝑘𝜋√𝑙2+𝑎2𝑚2
𝑏2)
2𝑙𝑚𝜋𝑡2
(
𝑎ℎ𝑒𝑓𝑓
2𝑘𝜋√𝑙2+𝑎2𝑚2
𝑏2
+𝑇𝑎𝑛ℎ(2𝜋𝑡
𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
)
)
71
𝜕𝑅𝑠𝑝
𝜕∆𝑥=
√𝑎3
𝑏3
𝑘𝜋2∆𝑥∑
(1+𝑎 ℎ𝑒𝑓𝑓 𝑇𝑎𝑛ℎ(
2𝑙𝜋𝑡𝑎 )
2𝑘𝑙𝜋)
𝑙(𝑎ℎ𝑒𝑓𝑓
2𝑘𝑙𝜋+𝑇𝑎𝑛ℎ(
2𝑙𝜋𝑡
𝑎))
1000𝑙=1 (
𝜋 𝐶𝑜𝑠(𝑙𝜋∆𝑥
𝑎)
𝑎−𝑆𝑖𝑛(
𝑙𝜋∆𝑥
𝑎)
𝑙∆𝑥) +
4√𝑎𝑏
𝑘𝜋2∆𝑥∆𝑦∑ ∑
(
(
1+
𝑎 ℎ𝑒𝑓𝑓 𝑇𝑎𝑛ℎ(2𝜋𝑡𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
2𝑘𝜋√𝑙2+𝑎2𝑚2
𝑏2)
√𝑙2+𝑎2𝑚2
𝑏2
(
𝑎ℎ𝑒𝑓𝑓
2𝑘𝜋√𝑙2+𝑎2𝑚2
𝑏2
+𝑇𝑎𝑛ℎ(2𝜋𝑡
𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
)
)
1000𝑚=1
1000𝑙=1 ∗ (
𝐶𝑜𝑠(𝑙𝜋∆𝑥
𝑎)𝑆𝑖𝑛(
𝑎𝑚𝜋∆𝑦
𝑏2)
2𝑚𝑡−
Sin(𝑙𝜋∆𝑥
𝑎)𝑆𝑖𝑛(
𝑎𝑚𝜋∆𝑦
𝑏2)
2𝑙𝑚𝜋𝑡∆𝑥)
𝜕𝑅𝑠𝑝
𝜕∆𝑦=
√𝑏3
𝑎3
𝑘𝜋2∆𝑥∆𝑦∑
(1+𝑏ℎ𝑒𝑓𝑓𝑇𝑎𝑛ℎ(
2𝑚𝜋𝑡𝑏
)
2𝑘𝑚𝜋)
(𝑏ℎ𝑒𝑓𝑓
2𝑘𝑚𝜋+𝑇𝑎𝑛ℎ(
2𝑚𝜋𝑡
𝑏))
(𝑎𝜋𝐶𝑜𝑠(
𝑎𝑚𝜋∆𝑦
𝑏2)
𝑏2𝑚−𝑆𝑖𝑛(
𝑎𝑚𝜋∆𝑦
𝑏2)
𝑚2∆𝑦) +1000
𝑚=1
4√𝑎𝑏
𝑘𝜋2∆𝑥∆𝑦∑ ∑
(
(
1+
𝑎 ℎ𝑒𝑓𝑓 𝑇𝑎𝑛ℎ(2𝜋𝑡𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
2𝑘𝜋√𝑙2+𝑎2𝑚2
𝑏2)
√𝑙2+𝑎2𝑚2
𝑏2
(
𝑎ℎ𝑒𝑓𝑓
2𝑘𝜋√𝑙2+𝑎2𝑚2
𝑏2
+𝑇𝑎𝑛ℎ(2𝜋𝑡
𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
)
)
1000𝑚=1
1000𝑙=1 (
𝑎2𝐶𝑜𝑠(𝑎𝑚𝜋∆𝑦
𝑏2)𝑆𝑖𝑛(
𝑙𝜋∆𝑥
𝑎)
2𝑏2𝑙𝑡−
𝑎 𝑆𝑖𝑛(𝑎𝑚𝜋∆𝑦
𝑏2) 𝑆𝑖𝑛(
𝑙𝜋∆𝑥
𝑎)
2𝑙𝑚𝜋𝑡∆𝑦)
𝜕𝑅𝑠𝑝
𝜕ℎ𝑒𝑓𝑓=
√𝑎3
𝑏3
𝑘𝜋2∆𝑥∑
𝑎𝑆𝑖𝑛(𝑙𝜋∆𝑥
𝑎)
2𝑘𝑙3𝜋 1000
𝑙=1 (𝑇𝑎𝑛ℎ(
2𝑙𝜋𝑡
𝑎)
(𝑎ℎ𝑒𝑓𝑓
2𝑘𝑙𝜋+𝑇𝑎𝑛ℎ(
2𝑙𝜋𝑡
𝑎))
−1+𝑇𝑎𝑛ℎ(
2𝑙𝜋𝑡
𝑎)
(𝑎ℎ𝑒𝑓𝑓
2𝑘𝑙𝜋+𝑇𝑎𝑛ℎ(
2𝑙𝜋𝑡
𝑎))
2)+
√𝑏3
𝑎3
𝑘𝜋2∆𝑦∑
𝑏𝑆𝑖𝑛(𝑎𝑚𝜋∆𝑦
𝑏2)
2𝑘𝑚3𝜋1000𝑚=1 (
𝑇𝑎𝑛ℎ(2𝑚𝜋𝑡
𝑏)
(𝑏ℎ𝑒𝑓𝑓
2𝑘𝑚𝜋+𝑇𝑎𝑛ℎ(
2𝑚𝜋𝑡
𝑏))
−1+𝑇𝑎𝑛ℎ(
2𝑚𝜋𝑡
𝑏)
(𝑏ℎ𝑒𝑓𝑓
2𝑘𝑚𝜋+𝑇𝑎𝑛ℎ(
2𝑚𝜋𝑡
𝑏))
2) +
72
4√𝑎𝑏
𝑘𝜋2∆𝑥∆𝑦∑ ∑
𝑎2𝑆𝑖𝑛(𝑙𝜋∆𝑥
𝑎)𝑆𝑖𝑛(
𝑎𝑚𝜋∆𝑦
𝑏2)
4𝑘𝑙𝑚(𝑙2+𝑎2𝑚2
𝑏2)
(
𝑇𝑎𝑛ℎ(2𝜋𝑡
𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
(
𝑎ℎ𝑒𝑓𝑓
2𝑘𝜋√𝑙2+𝑎2𝑚2
𝑏2
+𝑇𝑎𝑛ℎ(2𝜋𝑡
𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
)
−1000𝑚=1
1000𝑙=1
(
1+
𝑎 ℎ𝑒𝑓𝑓 𝑇𝑎𝑛ℎ(2𝜋𝑡𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
2𝑘𝜋√𝑙2+𝑎2𝑚2
𝑏2)
(
𝑎ℎ𝑒𝑓𝑓
2𝑘𝜋√𝑙2+𝑎2𝑚2
𝑏2
+𝑇𝑎𝑛ℎ(2𝜋𝑡
𝑎√𝑙2+
𝑎2𝑚2
𝑏2)
)
2
)