analisa respon dinamik sprung mass · pdf filetabel 1.2 batasan penelitian suspensi kendaraan...
TRANSCRIPT

Jurnal Ilmiah Research Sains VOL. 3. NO. 1 Februari 2017
139
ANALISA RESPON DINAMIK SPRUNG MASS TERHADAP SUDUT
KEMIRINGAN SUSPENSI PADA KENDARAAN RODA EMPAT
Oleh : Ir. Resep Sembiring. MT
Sekolah Tinggi Teknologi Immanuel Medan
ABSTRAK
Kenyamanan berkendaraan sudah menjadi tuntutan bagi para pengendara, sejalan
dengan itu penelitian tentang kenyamanan berkendaraan serta gangguannya
banyak dilakukan kondisi yang ingin dicapai dalam kenyamanan adalah
kemampuan pengendara untuk menahan getaran selama mungkin. Hal ini sulit
dicapai sehingga ditempuh dengan meminimumkan efek gangguan ketidak rataan
jalan dengan memasang system suspensi diantara roda dan badan kendaraan.
Hasilnya masih belum sesuai dengan yang diharapkan sehingga berbagai macam
penelitian dilakukan, salah satu pada kesempatan ini adalah dengan memiringkan
pemasangan suspensi. Pengaruh sudut pemasangan suspensi terhadap
kenyamanan dan stabilitas kendaraan diharapkan signifikan. Pemodelan
matematika setengah kendaraan dengan empat derajat kebebasan disimulasikan
untuk menganalisa effek sudut kemiringan suspensi terhadap sprung mass.
Respon dinamik yang dianalisa adalah perpindahan,kecepatan dan percepatan
sprung massa kendaraan. Untuk simulasi digunakan software MATLAB
Ra2008 versi 7.6 dengan input ketidakrataan jalan atau sinusoidal. Sudut
pemasangan suspensi diambil 85, 75, 70, 65, 60, 55 dan 50 derajat pada
kecepatan kendaraan 50,40 dan 30 km/h. Hasil analisa menunjukkan bahwa
pada kecepatan 50 km/jam dinyatakan pada kondisi sedikit tidak nyaman untuk
semua sudut yang diuji, pada kecepatan 40 km/jam nyaman pada sudut 60 sampai
75 drajat sedangkan pada kecepatan 30 km/jam nyaman pada sudut 50 sampai 85
drajat dan sudut kemiringan yang nyaman pada kecepatan 50, 40, dan 30 km/jam
adalah 70 drajat dengan gangguan jalan yang sinusoidal amplitudo 0,05 m ,
panjang gelombang 5 m.
Kata kunci : Sprung mass, Unsprung mass Getaran , Kemiringan suspensi
Jurnal Ilmiah Research Sains VOL. 3. NO. 1 Februari 2017
140
I. PENDAHULUAN
1.1. Latar Belakang
Kendaraan merupakan alat
transportasi yang dewasa ini
semakin dibutuhkan untuk menjawab
tantangan kesibukan dalam
memanfaatkan waktu seefisien
mungkin. Oleh karena itu
dibutuhkan kendaraan yang
nyaman untuk dikendarai. Salah satu
komponen yang berpengaruh
terhadap kenyamanan berkendaraan
adalah sistim suspensi kendaraan.
Kendaraan yang memiliki tingkat
kenyamanan dan kesetabilan yang
tinggi akan menjadi nilai yang
tersendiri pada kendaraan dan bagi
pengendaranya.
Getaran akibat jalan yang tidak
rata menyebabakan guncangan pada
kendaraan sehingga menyebabkan
ketidak nyamanan.
I.2. Identifikasi Masalah
Dari uraian diatas dapat
disimpulkan bahwa getaran pada
kendaraan merupakan penyebab
utama ketidak stabilan kendaraan
pada saat melintas diajalan yang
tidak rata (sinusoidal). Getaran
merupakan perpindahan energy dari
roda ke sprung mass yang
menyebabkan sprung mass begetar
dan tidak nyaman. Oleh sebab itu
energi tersebut direduksi dengan
pemasangan suspensi antara
unsprung mass dengan sprung mass.
I.3 Rumusan Masalah
Dari uraian diatas penulis
merumuskan masalah sebagai
berikut:
1. Berapakah sudut kemiringan
suspensi yang nyaman untuk
kecepatan kendaraan 50, 40 dan
30 km/h dengan amplitudo 0,05
m, panjang gelombanga 5 m.
2 Berapakah besar sudut kemiringan
suspensi yang paling efektif untuk
meredam getaran yang
ditimbulkan oleh jalan yang tidak
rata
I.4 Tujuan Penelitian
Analisa ini dilakukan dengan
tujuan untuk mengetahui:
Untuk mengetahui sudut kemiringan
suspensi yang nyaman pada sprung
mass pada kecepatan kendaraan 50,
40 dan 30 km/h dengan amplitudo
jalan 0,05 m dan panjang gelombang
jalan 5 m.
I.5 Manfaat Penelitian faat
Dari hasil penelitian tesis ini
diharapkan akan mempunyai manfaat
yaitu
1. Sebagai informasi ke masyarakat
dan dunia teknologi tentang
pengaruh sudut kemiringan
pemasangan suspensi pada
kendaraan roda empat.
2. Sebagai pertimbangan dan
pembanding bagi perkembangan
suspensi otomotif Indonesia
dimasa mendatang.
Jurnal Ilmiah Research Sains VOL. 3. NO. 1 Februari 2017
141
3. Sebagai bahan masukan untuk
pengembangan materi praktek dan
teori pembelajaran.
I.6 Parameter Penelitian dan
Variabel Bebas
Sebagai parameter dalam
penelitian ini adalah :
Tabel 1.1 Parameter penelitian dan
Variabel penelitian
Varibel bebas
Parameter
yang di ukur
Sudut
pemasangan
suspensi
terhadap
lateral
Kecepatan
kendaraan
85o, 80o,
75o, 70o,
65o
60o, 55o dan
50o
30
km/jam,
40
km/jam,
50
km/jam
Amplitudo
respon
displacement,
kecepatan
dan
perpecatan
badan
kenderaan
(sprung
mass)
I.7 Batasan dan Lingkup
Penelitian
1. Penelitian ini dibatasi hanya
membahas respon dinamik
percepatan gerak vertical dan
lateral sprung mass.
2. Dalam penelitian ini tidak
ditentukan jenis kendaraan
sebagai objek tetapi hanya
berdasarkan spesifikasi suspensi
yang ditabelkan berikut.
Batasan spesifikasi suspensi
kendaraan ditabelkan seperti
Tabel 1.2 berikut ini.
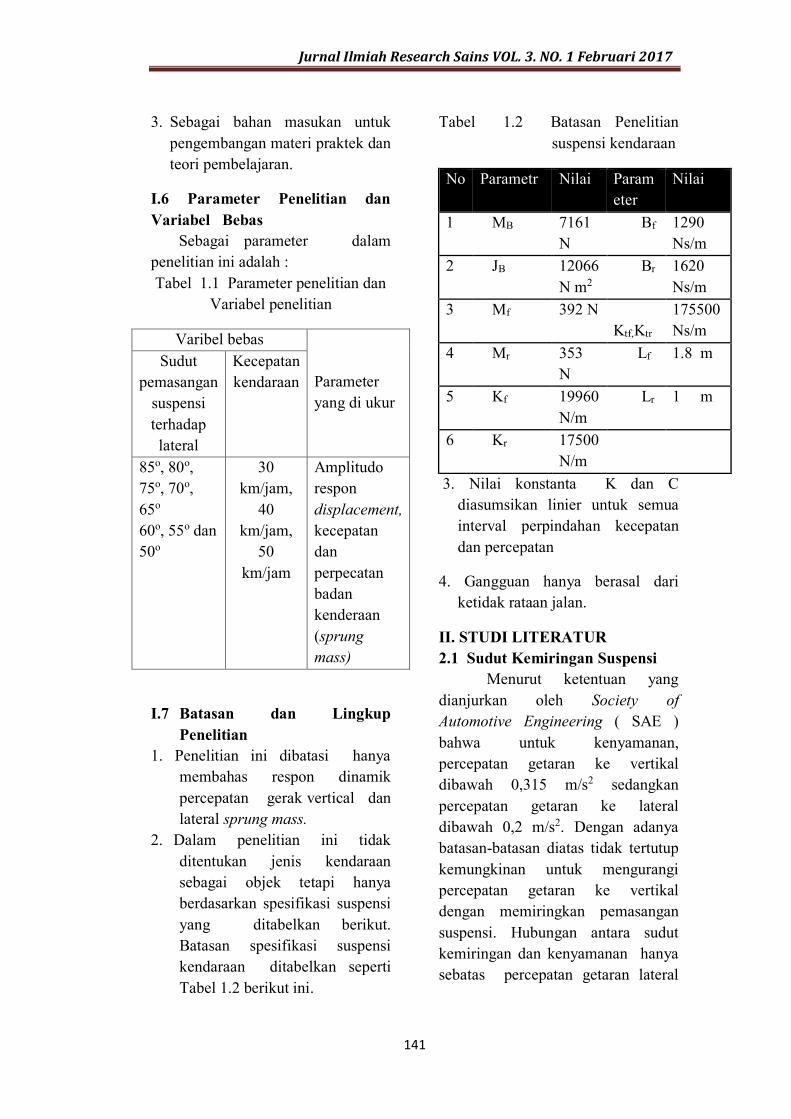
Tabel 1.2 Batasan Penelitian
suspensi kendaraan
No Parametr Nilai Param
eter
Nilai
1 MB 7161
N
Bf 1290
Ns/m
2 JB 12066
N m2
Br 1620
Ns/m
3 Mf 392 N
Ktf,Ktr
175500
Ns/m
4 Mr 353
N
Lf 1.8 m
5 Kf 19960
N/m
Lr 1 m
6 Kr 17500
N/m
3. Nilai konstanta K dan C
diasumsikan linier untuk semua
interval perpindahan kecepatan
dan percepatan
4. Gangguan hanya berasal dari
ketidak rataan jalan.
II. STUDI LITERATUR
2.1 Sudut Kemiringan Suspensi
Menurut ketentuan yang
dianjurkan oleh Society of
Automotive Engineering ( SAE )
bahwa untuk kenyamanan,
percepatan getaran ke vertikal
dibawah 0,315 m/s2 sedangkan
percepatan getaran ke lateral
dibawah 0,2 m/s2. Dengan adanya
batasan-batasan diatas tidak tertutup
kemungkinan untuk mengurangi
percepatan getaran ke vertikal
dengan memiringkan pemasangan
suspensi. Hubungan antara sudut
kemiringan dan kenyamanan hanya
sebatas percepatan getaran lateral
Jurnal Ilmiah Research Sains VOL. 3. NO. 1 Februari 2017
142
yang dianjurkan yaitu dibawah 0,2
m/s2.
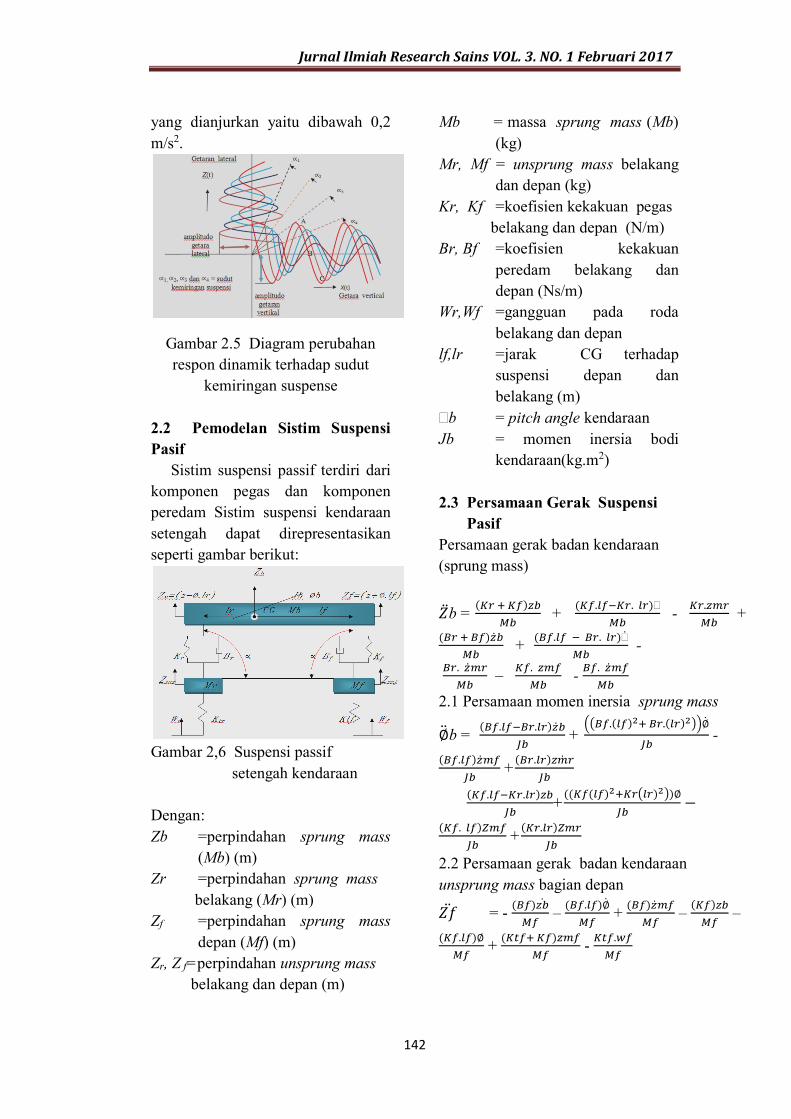
Gambar 2.5 Diagram perubahan
respon dinamik terhadap sudut
kemiringan suspense
2.2 Pemodelan Sistim Suspensi
Pasif
Sistim suspensi passif terdiri dari
komponen pegas dan komponen
peredam Sistim suspensi kendaraan
setengah dapat direpresentasikan
seperti gambar berikut:
Gambar 2,6 Suspensi passif
setengah kendaraan
Dengan:
Zb =perpindahan sprung mass
(Mb) (m)
Zr =perpindahan sprung mass
belakang (Mr) (m)
Zf =perpindahan sprung mass
depan (Mf) (m)
Zr, Z f=perpindahan unsprung mass
belakang dan depan (m)
Mb = massa sprung mass (Mb)
(kg)
Mr, Mf = unsprung mass belakang
dan depan (kg)
Kr, Kf =koefisien kekakuan pegas
belakang dan depan (N/m)
Br, Bf =koefisien kekakuan
peredam belakang dan
depan (Ns/m)
Wr,Wf =gangguan pada roda
belakang dan depan
lf,lr =jarak CG terhadap
suspensi depan dan
belakang (m)
∅b = pitch angle kendaraan
Jb = momen inersia bodi
kendaraan(kg.m2)
2.3 Persamaan Gerak Suspensi
Pasif
Persamaan gerak badan kendaraan
(sprung mass)
�̈�b = (𝐾𝑟 + 𝐾𝑓)𝑧𝑏
𝑀𝑏 +
(𝐾𝑓.𝑙𝑓−𝐾𝑟. 𝑙𝑟)∅
𝑀𝑏 -
𝐾𝑟.𝑧𝑚𝑟
𝑀𝑏 +
(𝐵𝑟 + 𝐵𝑓)�̇�𝑏
𝑀𝑏 +
(𝐵𝑓.𝑙𝑓 − 𝐵𝑟. 𝑙𝑟)∅̇
𝑀𝑏 -
𝐵𝑟. �̇�𝑚𝑟
𝑀𝑏 –
𝐾𝑓. 𝑧𝑚𝑓
𝑀𝑏 -
𝐵𝑓. �̇�𝑚𝑓
𝑀𝑏
2.1 Persamaan momen inersia sprung mass
∅̈b = (𝐵𝑓.𝑙𝑓−𝐵𝑟.𝑙𝑟)�̇�𝑏
𝐽𝑏 +
((𝐵𝑓.(𝑙𝑓)2+ 𝐵𝑟.(𝑙𝑟)2))∅̇
𝐽𝑏 -
(𝐵𝑓.𝑙𝑓)�̇�𝑚𝑓
𝐽𝑏 +
(𝐵𝑟.𝑙𝑟)𝑧𝑚𝑟̇
𝐽𝑏
(𝐾𝑓.𝑙𝑓−𝐾𝑟.𝑙𝑟)𝑧𝑏
𝐽𝑏+
((𝐾𝑓(𝑙𝑓)2+𝐾𝑟(𝑙𝑟)2))∅
𝐽𝑏−
(𝐾𝑓. 𝑙𝑓)𝑍𝑚𝑓
𝐽𝑏 +
(𝐾𝑟.𝑙𝑟)𝑍𝑚𝑟
𝐽𝑏
2.2 Persamaan gerak badan kendaraan
unsprung mass bagian depan
𝑍�̈� = - (𝐵𝑓)𝑧�̇�
𝑀𝑓 –
(𝐵𝑓.𝑙𝑓)∅̇
𝑀𝑓 +
(𝐵𝑓)�̇�𝑚𝑓
𝑀𝑓 –
(𝐾𝑓)𝑧𝑏
𝑀𝑓 –
(𝐾𝑓.𝑙𝑓)∅
𝑀𝑓 +
(𝐾𝑡𝑓+ 𝐾𝑓)𝑧𝑚𝑓
𝑀𝑓 -
𝐾𝑡𝑓.𝑤𝑓
𝑀𝑓
Jurnal Ilmiah Research Sains VOL. 3. NO. 1 Februari 2017
143
2.3 Persamaan gerak badan kendaraan
unsprung mass bagian belakang
�̈�r = - (𝐵𝑟)𝑧�̇�
𝑀𝑟 +
(𝐵𝑟.𝑙𝑟)∅̇
𝑀𝑟 +
(𝐵𝑟)�̇�𝑚𝑟
𝑀𝑟-
(𝐾𝑟)𝑧𝑏
𝑀𝑟 +
(𝐾𝑟.𝑙𝑟)∅
𝑀𝑟 +
(𝐾𝑟+𝐾𝑡𝑟)𝑧𝑚𝑟
𝑀𝑟 –
𝐾𝑡𝑟 𝑤𝑟
𝑀𝑟
2.4Dengan memilih variable keadaan sebagai
berikut;
x1= �̇�b , Kecepatan sprung mass
𝑥2= ∅̇ ,Kec. Sudut
𝑥3= �̇�f ,Kec.unsprung mass (depan)
𝑥4= �̇�r , Kec. Unsprung mass (belakang)
𝑥5= zb , Perpindahan sprung mass
𝑥6= ∅̇ ,Sudut momen
𝑥7= zf ,Perpindahan unsprung mass
(depan)
x8= zr Perpindahan unsprung mass
(belakang)
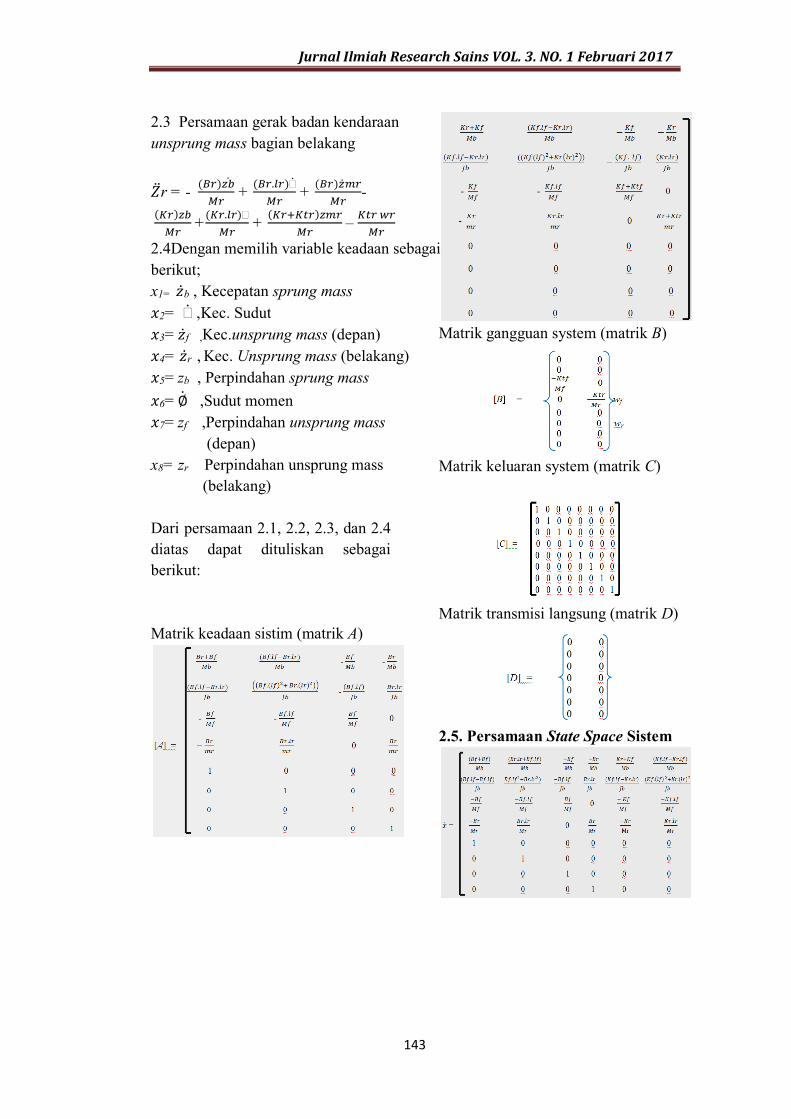
Dari persamaan 2.1, 2.2, 2.3, dan 2.4
diatas dapat dituliskan sebagai
berikut:
Matrik keadaan sistim (matrik A)
Matrik gangguan system (matrik B)
Matrik keluaran system (matrik C)
Matrik transmisi langsung (matrik D)
2.5. Persamaan State Space Sistem
Jurnal Ilmiah Research Sains VOL. 3. NO. 1 Februari 2017
144
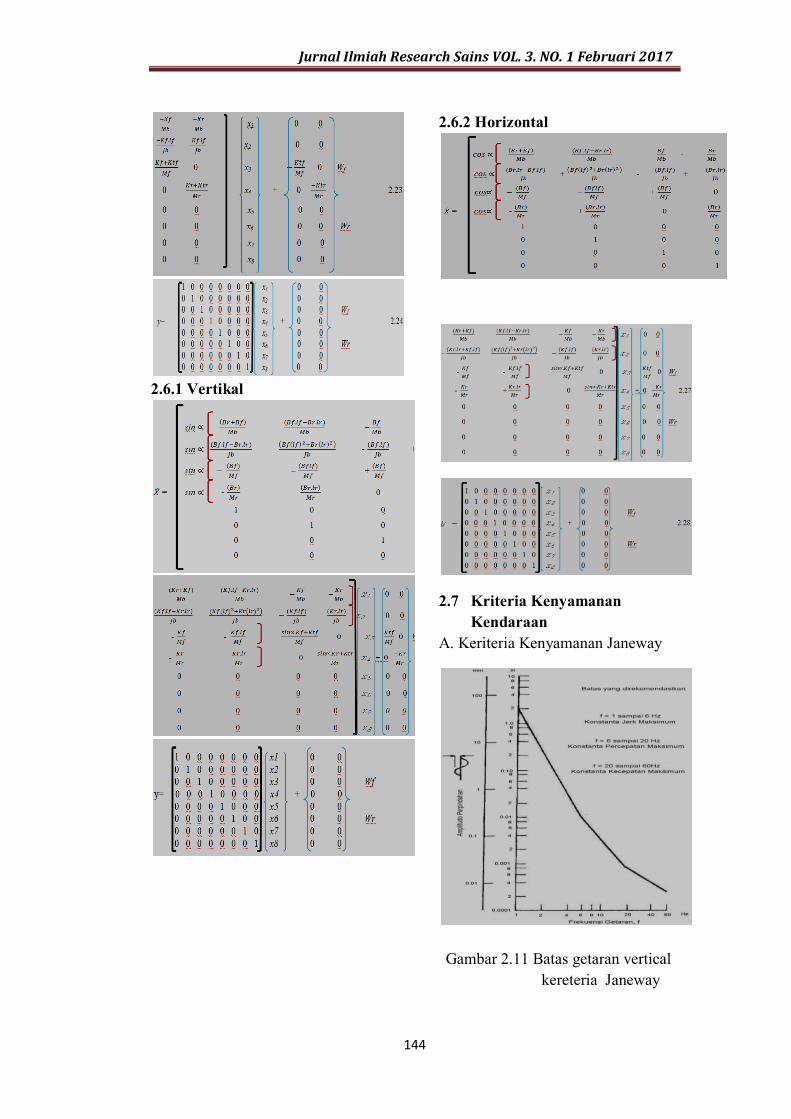
2.6.1 Vertikal
2.6.2 Horizontal
2.7 Kriteria Kenyamanan
Kendaraan
A. Keriteria Kenyamanan Janeway
Gambar 2.11 Batas getaran vertical
kereteria Janeway
Jurnal Ilmiah Research Sains VOL. 3. NO. 1 Februari 2017
145
Kenyamanan penumpang pada
kendaraan darat telah dirumuskan
oleh Jane way yang berdasarkan
kenyamanan penumpang ini pada
hubungan laju kecepatan, percepatan
terhadap amplitudo dan frekuensi
getar yang terjadi. Pada umumnya
tingkat kenyamanan tersebut
didasarkan pada tiga level frekuensi
yaitu masing-masing pada frekuensi
level pertama pada 1–6 Hz, kedua
pada frekuensi 6–20 Hz dan level
ketiga pada frekuensi 20–60 Hz.
Untuk level frekuensi 1–6 Hz harga
maksimum dari atau besarnya
percepatan getaran persatuan waktu
tidak boleh melebihi 12,6 m/dt3 atau
sebesar 496 inci/dt3 besarnya
amplitudo maksimum adalah:
A1 = 12,6
𝑚
𝑑𝑡3
𝜔3 𝑟𝑎𝑑
𝑑𝑡3
= 12,6
𝑚
𝑑𝑡3
(2.3,14)3 𝑟𝑎𝑑
𝑑𝑡3
= 0,0508
m
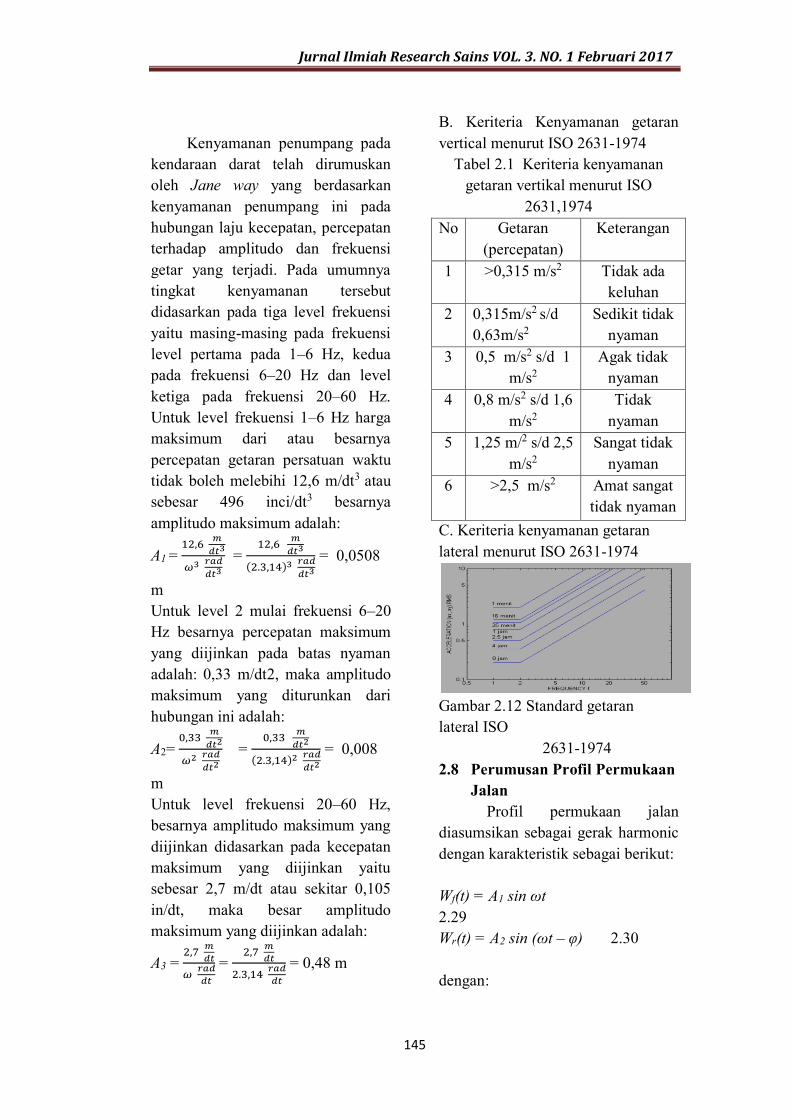
Untuk level 2 mulai frekuensi 6–20
Hz besarnya percepatan maksimum
yang diijinkan pada batas nyaman
adalah: 0,33 m/dt2, maka amplitudo
maksimum yang diturunkan dari
hubungan ini adalah:
A2= 0,33
𝑚
𝑑𝑡2
𝜔2 𝑟𝑎𝑑
𝑑𝑡2
= 0,33
𝑚
𝑑𝑡2
(2.3,14)2 𝑟𝑎𝑑
𝑑𝑡2
= 0,008
m
Untuk level frekuensi 20–60 Hz,
besarnya amplitudo maksimum yang
diijinkan didasarkan pada kecepatan
maksimum yang diijinkan yaitu
sebesar 2,7 m/dt atau sekitar 0,105
in/dt, maka besar amplitudo
maksimum yang diijinkan adalah:
A3 = 2,7
𝑚
𝑑𝑡
𝜔 𝑟𝑎𝑑
𝑑𝑡
= 2,7
𝑚
𝑑𝑡
2.3,14 𝑟𝑎𝑑
𝑑𝑡
= 0,48 m
B. Keriteria Kenyamanan getaran
vertical menurut ISO 2631-1974
Tabel 2.1 Keriteria kenyamanan
getaran vertikal menurut ISO
2631,1974
No Getaran
(percepatan)
Keterangan
1 >0,315 m/s2 Tidak ada
keluhan
2 0,315m/s2 s/d
0,63m/s2
Sedikit tidak
nyaman
3 0,5 m/s2 s/d 1
m/s2
Agak tidak
nyaman
4 0,8 m/s2 s/d 1,6
m/s2
Tidak
nyaman
5 1,25 m/2 s/d 2,5
m/s2
Sangat tidak
nyaman
6 >2,5 m/s2 Amat sangat
tidak nyaman
C. Keriteria kenyamanan getaran
lateral menurut ISO 2631-1974
Gambar 2.12 Standard getaran
lateral ISO
2631-1974
2.8 Perumusan Profil Permukaan
Jalan
Profil permukaan jalan
diasumsikan sebagai gerak harmonic
dengan karakteristik sebagai berikut:
Wf(t) = A1 sin ωt
2.29
Wr(t) = A2 sin (ωt – φ) 2.30
dengan:

Jurnal Ilmiah Research Sains VOL. 3. NO. 1 Februari 2017
146
wf(t) = profil permukaan jalan pada
roda depan
wr(t) = profil permukaan jalan pada
roda belakang
ω = frekuensi profil jalan = 2л𝑣
𝜆
A = amplitudo profil permukaan
jalan
φ = beda fase antara roda depan
dengan roda belakang = 2л𝐿
𝜆
λ = panjang gelombang profil jalan
V = kecepatan kendaraan
Perbedaan waktu yang diberikan
untuk ban depan dan belakang
sebesar td, dengan td = 𝑙𝑓−𝑙𝑟
𝑉
Dalam penelitian ini diasumsikan :
l = 2,8 m lf = 1,8 m, lr = 1
m (dari titik CG)
A= 0,05 m
λ= 5 m
Karena kondisi jalan
merupakan fungi sinusoidal dengan
panjang gelombang L m per siklus
dan kecepatan kendaraan adalah v
km/h maka frekwensi eksitasinya
adalah :
f = 𝑣
3600.𝐿 Hz 2.31
atau
ω = 2л 𝑣
3600. 1
𝐿 rad/s 2.32
III.METODOLOGI
PENELITIAN
3.1 Metode Penelitian
Metode yang dipilih dalam penelitian
ini agar memperoleh hasil yang
maksimum adalah metode simulasi
computer dengan menggunakan
prangkat lunak MATLAB Ra2008
versi 7.6.
3.1.1 Sistematika Penelit
IV. Analisis Data Hasil Penelitian
4.1 Analisa Data
Analisa data dilakukan pada sistem
suspensi pasif, dengan
memvariasikan posisi atau sudut
pemasangan suspensi..
4.2 Grafik Hasil Simulasi
Pengujian Getaran Vertikal

Jurnal Ilmiah Research Sains VOL. 3. NO. 1 Februari 2017
147
Pengujian getaran Lateral

Jurnal Ilmiah Research Sains VOL. 3. NO. 1 Februari 2017
148
Grafik 4.1 adalah grafik amplitudo
sprung mass vs sudut kemiringan
suspensi dimana pada grafik tersebut
dapat diketahui bahwa amplitudo
getaran secara vertikal mengalami
peningkatan dengan meningkatnya
sudut kemiringan suspensi,
sedangkan amplitudo getaran secara
horizontal mengalami penurunan,
seperti yang ditunjukkan pada grafik
4.4.
Demikian juga grafik 4.2,
grafik kecepatan sprung mass vs
sudut krmiringan suspensi yang
menunjukkan bahwa kecepatan
sprung mass secara vertical juga
mengalami peningkatan seiring
dengan meningkatnya sudut
kemiringan suspensi dan sebaliknya
mengalami penurunan seiring dengan
menurunnya sudut kemringan
suspensi dan hal tersebut ditunjukkan
pada grafik 4.5. Demikian juga
dengan grafik 4.3 adalah grafik
respon dinamik percepatan sprung
mass vs sudut kemiringan suspensi,
dimana percepatan sprung mass
kearah vertikal juga mengalami
prningkatan seiring dengan
meningkatnya sudut kemiringan
suspensi dan sebaliknya mengalami
penurunan seiring dengan
menurunnya sudut kemiringan
suspensi dan ditunjukkan pada grafik
4.6. Dari uraian diatas amplitudo,
kecepatan dan percepatan sprung
mass mengalami penurunan dengan
menurunnya sudut pemasangan
suspensi dan sebaliknya meningkat
dengan meningkatnya sudut
pemasangan suspensi. Dari grafik
4.1, 4.2, 4.3, 4.4, 4,5 dan 4.6 respon
dinamik sprung mass berubah secara
non linier dan antara respon dinamik
vertikal dengan respon dinamik
horizontal terjadi kontradiksi atau
berbanding terbalik.
Dari grafik 4.4, 4.5 dan 4.6
adalah grafik respon dinamik sprung
mass kearah horizontal dimana
amplitudo, kecepatan dan percepatan
sprung mass mengalami penurunan
dengan meningkatnya sudut
pemasangan suspensi dan sebaliknya
Jurnal Ilmiah Research Sains VOL. 3. NO. 1 Februari 2017
149
akan meningkat dengan menurunnya
sudut pemasangan suspensi.
Meningkatnya respon
dinamik kearah horizontal berarti
menurunnya respon dinamik kearah
vertical dan sebaliknya
meningkatnya respon dinamik kearah
vertical berarti menurunnya respon
dinamik kearah horizontal.
Meningkatnya respon dinamik
khususnya amplitudo kearah
horizontal yang berarti defleksi
suspensi kearah vartikal menurun
dan jika hal ini sampai pada titik
tertentu dimana defleksi suspensi
vertikal lebih kecil dari defleksi
suspensi horizontal berakibat
terjadinya benturan pada sprung
mass (tidak nyaman).
4.3 Analisa Kenyamanan
4.3.1Analisa respon dinamik
sprung massa mengacu keriteria
Janeway
Dengan mengasumsikan
permukaan jalan merupakan fungsi
sinusoidal seperti diuraikan pada bab
2, maka dengan persamaan 2.31
dapat dihitung bahwa untuk
kecepatan 30 km/jam panjang
gelombanga 5 m maka frekwensinya
adalah:
f =𝑉
𝜆.3,6 hz =
30
5(3,6)hz = 1,666 hz
Maka amplitudo ijin dari kriteria
Janeway dengan persamaan 2.32
adalah:
A= 12,6
𝜔3 (meter)=12,6
(2л.1,666)3 meter =
0,011 m
Sedangkan untuk kecpatan 40
km/jam frekwensi (f) adalah;
f = 𝑉
𝜆(3,6) ℎ𝑧 =
40
5(3,6) hz=2,222 hz
dan amplitudo ijin dari criteria
Janeway adalah:
A = 12,6
𝜔3 m = 12,6
(2л.2,222)3=0,00437 m
Demikian juga untuk kecepatan 50
km/jam frekwensi(f) adalah:
f = 2,777 haz
dan amplitudo ijin dari kriteria
Janeway adalah;
A=0,002584 m
Dari hitungan diatas dapat
dipastikan bahwa kecepatan
kendaraan 30, 40 dan 50 km/jam
berada pada level frekwensi 1 – 6 hz
menurut keriteria Janeway (batasan
waktu bagi tubuh manusia
tahan,aman terhadap kesehatan
akibat getaran). amplitudo
maksimum pada setiap sudut
kemiringan suspensi masih dibawah
ijin kriteria Janeway. Berarti
knyamanan dan stabilitas kendaraan
baik pada kecepatan 30, 40 dan 50
km/jam berbasis amplitudo.
4.3.2 Analisa respon dinamik
sprung mass dengan ketentuan
ISO 2631
Mengacu kepada ketentuan
ISO (International Standard
Organization ) 2631-1974 bahwa
kenyamanan getaran vertical sprung
mass berada pada percepatan

Jurnal Ilmiah Research Sains VOL. 3. NO. 1 Februari 2017
150
maksimum < 0,315 𝑚
𝑑𝑡2 (tabel 2.1)
dan kenyamanan getaran lateral
sprung mass berada pada percepatan
maksimum < 0,2 𝑚
𝑑𝑡2 (grafik 2.2).
Dengan demikian dari grafik
perepatan vertical dan lateral sprung
mass (grafik 4.3 dan 4.6) diketahui
bahwa pada kecepatan 50 km/jam
tidak pada kondisi nyaman (sedikit
tidak nyaman) untuk setiap sudut,
sedangkan untuk kecepatan 40
km/jam nyaman pada sudut
kemiringan suspensi ( 60 sampai 75
) deg. Pada kecepatan kendaraan 30
km/jam nyaman pada sudut
kemiringan suspensi 50 sampai 85 )
deg. Dari analisa diatas diproleh
sudut-sudut kemiringan suspensi
efektif menurut standart ISO .Sudut-
sudut tersebut adalah:
Pada kecepatan 50 km/jam
kondisi sedikit tidak nyaman
Pada kecepatan 40 km/jam
nyaman pada sudut 60 sampai 75 deg
Pada kecepatan 30 km/jam
nyaman pada sudut 50 sampai 85 deg
4.3.3 Penentuan sudut yang paling
efektif
Sudut paling efektif yang
dimaksutkan adalah sudut
kemiringan suspensi yang nyaman
pada kecepatan 50, 40 dan 30
km/jam. Pada kecepatan 50 km/jam
dengan sudut kemiringan 70 deg
sampai 85 deg masih pada kondisi
sedikit tidak nyaman. Dengan
demikian maka sudut kemiringan
suspensi yang paling efektif adalah
70 deg.
V. Kesimpulan dan Saran
1. Kesimpulan
Dari uraian demi uraian dan
pembahasan diatas maka dapat
disimpulkan bahwa:
1. Dari analisa yang telah dilakukan
diatas pada kondidsi jalan sinusoidal
dengan amplitudo 0,05 m, panjang
gelombang 5 m dan veriasi sudut
kemiringan suspensi dari 50 deg
sampai 85 deg dengan interval 5
deg pada kecepatan 30, 40 dan
50 km/jam diproleh sudut
kemiringan suspensi sebagai beikut:
Mengacu kepada ketentuan
Janeway kecepatan 50, 40 dan 30
km/jam berada pada level
frekwensi 1 – 6 Hz dan pada
kecepatan 30 dan 40 km/jam
dinyatakan nyaman sedangkan pada
kecepatan 50 km/jam dinyatakan
sedikit tidak nyaman.
Menurut ISO 2631 – 1974 sudut
kemirimgan suspensi yang nyaman
adalah:
Pada kecepatan 50 km/jam
dinyatakan pada kondisi sedikit
tidak nyaman untuk semua sudut
kemiringan suspensi yang di uji.
Pada kecepatan 40 km/jam
dinyatakan pada kodisi nyaman pada
sudut kemiringan suspensi 60
sampai 75 deg

Jurnal Ilmiah Research Sains VOL. 3. NO. 1 Februari 2017
151
Pada kecepatan kendaraan 30
km/jam dinyatakan pada kondisi
nyaman untuk sudut kemiringan
suspensi 50 sampai 85 deg
2. Sudut kemiringan suspensi yang
efektif untuk kecepatan 50, 40 dan
30 km/jam berada pada sudut 70 deg
3. Perubahan respon dinamik
sprung mass akibat perubahan
sudut pemasangan terjadi
secara non linier. 4. Respon
dinamik vertical dangam respon
dinamik horizontal berbanding
terbalik.
2. Saran
1. Agar mendapatkan hasil
yang lebih mendekati
sebenarnya hendaknya dilakukan
dengan menggunakan model
kendaraan penuh sehingga
pengaruh gerakan horisontal dan
lateral dapat dianalisa dengan lebih
komplit.
2. Sebaiknya ditentukan jenis
kendaraan yang dianalisa agar dapat
diaplikasikan dengan nyata.
DAFTAR PUSTAKA
[1] Darus,Rosheila. 2008. Modelling
and Control of
Active Suspensions for a Full
Car Model. Malaysia
Universitas Teknologi
Malaysia
[2] Stone, Richard dan Ball, J .K.
2004. Automotive Engineering
Fundamentals.Warrendale SAE.
[3] Thomas D. Gillespie, “
Fundamentals of Vehicle
Dynamics”, Society of
Automotive Engineers, Inc.
1994
[4] Sutantra, Nyoman I,
Teknologi Otomotif Teori
dan Aplikasinya, Edisi
Pertama, Penerbit Guna
Widya, Surabaya. 2010
[5] Ramses Y. Hutahaean,
Getaran Mekanik, dilengkapi
pemrograman dan simulasi
dengan Matlab, Penerbit ANDI
Yogyakarta 2011.
[6] Hutahaean, Ramses,
Mekanisme dan Dinamika
Mesin, Edisi
revisi,Penerbit Andi,Yogyakarta,
2001
[7]. http: / /paparisa. unpatti. ac. id.
Analisa Respon Dinamik Sepeda
Motor Terhadap Posisi Sudut
Suspensi. Diaskes pada tanggal
3 November 2014.
[8]. Jazar, Reza N.. (2008). Vehicle
Dynamic Theory and
Application. New
York:Springer
[9] SS.2011. Mechanical Vibration
Fifth Edition. Miami :
pearson Education
Jurnal Ilmiah Research Sains VOL. 3. NO. 1 Februari 2017
152
[10]. Hasri.2014. Sistem Suspensi.
(Online) , (http: //
hasri2jujur rotomotif.
blogspot.com/2014/03/
/siste suspensi .html),
diakses 4 Februari 2014
[11]. Arhami Muhammad, Desiani
Anita. (2005 )
Pemrograman MATLAB.
Yogyakarta: Andi.
[12]. Modeling Simulation of
Dinamic System, Robert
L. Wood & Kent L.
Lawrence, University of
Texas at Arlington,
Prentice Hall, Upper
Saddle River,NJ 07508
[13]. Corriga, G., Sanna, S. & Usai,
G., An Optimal Tandem
Active-Passive Suspension
Systems for Road Vehicles
with Minimum Power
Consumption, IEEE
Transactions on Industrial
Electronics, Vol. 38, No. 3
(June 1991).
[14]. Campos, J, David, F,
Lewis, S, Ikenaga, S,
Scully, Enans, M., Active
Suspension Control of
Ground Vehicle Heave and
Pitch Motion. Automation
And Robotics Research
Institute, The University
of Texas at Arlington.
2004