anÆlisis de observabilidad y controlabilidad para...
TRANSCRIPT

Análisis de observabilidad y controlabilidadpara sistemas diferencialmente planos.
Aplicación a un sistema de oscilaciones decalcio
Oscar Alejandro Esquivel FloresAsesor: Dr. Ricardo Aguilar López
Universidad Autónoma MetropolitanaMaestría en ciencias de la computación
Julio de 2007

Contenido
1 Preliminares matemáticos y conceptos básicos 31.1 Sistemas de ecuaciones diferenciales . . . . . . . . . . . . . . . . 3
1.1.1 Notación matricial . . . . . . . . . . . . . . . . . . . . . . 41.1.2 Existencia y unicidad de soluciones . . . . . . . . . . . . . 61.1.3 Sistemas lineales . . . . . . . . . . . . . . . . . . . . . . . 71.1.4 Solución de sistemas de ecuaciones diferenciales . . . . . . 8
1.2 Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111.2.1 Modelos de sistemas a controlar . . . . . . . . . . . . . . . 121.2.2 Objetivos de control . . . . . . . . . . . . . . . . . . . . . 131.2.3 Técnicas básicas de control . . . . . . . . . . . . . . . . . 15
1.3 Controlabilidad y observabilidad . . . . . . . . . . . . . . . . . . 211.3.1 Controlabilidad . . . . . . . . . . . . . . . . . . . . . . . . 211.3.2 Observabilidad . . . . . . . . . . . . . . . . . . . . . . . . 24
2 Espacio de estados y sistemas dinámicos 282.1 Sistema dinámico . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.1.1 Concepto general de sistema dinámico . . . . . . . . . . . 282.2 Sistemas dinámicos diferenciables . . . . . . . . . . . . . . . . . . 34
2.2.1 Estados de equilibrio . . . . . . . . . . . . . . . . . . . . . 382.3 Propiedades de los sistemas . . . . . . . . . . . . . . . . . . . . . 39
2.3.1 Linealización . . . . . . . . . . . . . . . . . . . . . . . . . 412.4 Sistemas lineales . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
2.4.1 Sistemas lineales generales . . . . . . . . . . . . . . . . . . 422.5 Estabilidad y eigenmovimientos . . . . . . . . . . . . . . . . . . . 45
2.5.1 De�niciones básicas de estabilidad . . . . . . . . . . . . . 462.5.2 Análisis espectral de sistemas diferenciables lineales . . . 49
3 Álgebra diferencial y planitud 573.1 Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 573.2 Notación y de�niciones básicas del álgebra diferencial . . . . . . 59
4 Oscilaciones de calcio 664.1 Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 664.2 Modelo de oscilaciones de Ca2+ . . . . . . . . . . . . . . . . . . . 68
1

4.2.1 Mecanismos involucrados en el sistema . . . . . . . . . . . 684.2.2 Modelo matemático . . . . . . . . . . . . . . . . . . . . . 69
4.3 Bursting, caos y cuasiperiodicidad . . . . . . . . . . . . . . . . . 714.4 Análisis de la dinámica libre del sistema de Ca2+ . . . . . . . . . 724.5 Análisis de bifurcación . . . . . . . . . . . . . . . . . . . . . . . . 74
4.5.1 Variaciones paramétricas . . . . . . . . . . . . . . . . . . 744.5.2 Sistema parametrizado . . . . . . . . . . . . . . . . . . . . 76
4.6 Pruebas de controlabilidad y observabilidad . . . . . . . . . . . . 80
5 Control del sistema de oscilaciones de Ca2+ 825.1 Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 825.2 Diseño de una ley de control retroalimentado no lineal . . . . . . 835.3 Aplicación de la ley de control . . . . . . . . . . . . . . . . . . . . 85
5.3.1 Regulación de Ca2+ intracelular . . . . . . . . . . . . . . 865.3.2 Seguimiento de Ca2+ intracelular . . . . . . . . . . . . . . 865.3.3 Sincronización de calcio Ca2+ . . . . . . . . . . . . . . . . 875.3.4 Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . 88
6 Observación del sistema de oscilaciones de Ca2+ 896.1 Enfoque algebráico diferencial del sistema . . . . . . . . . . . . . 896.2 Sincronización usando observadores . . . . . . . . . . . . . . . . . 91
6.2.1 Sincronización usando un esquema de modo deslizante . . 916.2.2 Sincronización usando un esquema Luenberger . . . . . . 93
A Códigos en Matlab 98A.1 Sistema de ecuaciones diferenciales . . . . . . . . . . . . . . . . . 98A.2 Sistema de ecuaciones algebraicas . . . . . . . . . . . . . . . . . . 99A.3 Análisis de bifurcación . . . . . . . . . . . . . . . . . . . . . . . . 99
A.3.1 Variación de parámetros �; k; kf . . . . . . . . . . . . . . 99A.3.2 Sistema parametrizado . . . . . . . . . . . . . . . . . . . . 100
A.4 Objetivos de control . . . . . . . . . . . . . . . . . . . . . . . . . 100A.4.1 Regulación . . . . . . . . . . . . . . . . . . . . . . . . . . 100A.4.2 Seguimiento . . . . . . . . . . . . . . . . . . . . . . . . . . 101A.4.3 Sincronización . . . . . . . . . . . . . . . . . . . . . . . . 102
A.5 Observación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104A.5.1 Sincronización usando modo deslizante . . . . . . . . . . . 104A.5.2 Sincronización usando modo Luenberger . . . . . . . . . . 105
2

Capítulo 1
Preliminares matemáticos yconceptos básicos
1.1 Sistemas de ecuaciones diferenciales
En general, un sistema de ecuaciones diferenciales de primer orden puede ex-presarse de la forma
x0
1 = f1 (t; x1; x2; :::; xn)
x0
2 = f2 (t; x1; x2; :::; xn)...
x0
n = fn (t; x1; x2; :::; xn)
(1.1)
donde f1; f2; :::; fn son n funciones dadas de�nidas en alguna región D de unespacio Euclidiano de dimensión (n+ 1) y x1; x2; :::; xn son n funciones descono-cidas.Resolver el sistema 1.1 signi�ca encontrar un intervalo I sobre el eje t y n
funciones '1; :::; 'n de�nida sobre I tales que:
� '0
1 (t) ; '0
2 (t) ; :::; '0
n (t) existen para cada t en I;
� El punto (t; '1 (t) ; :::; 'n (t)) permanece en D para cada t en I;
� '0
j (t) = fj (t; '1 (t) ; '2 (t) ; :::; 'n (t)) para cada t en I donde j = 1; :::; n:
Naturalmente las funciones fj pueden ser reales o complejas. Para nuestroestudio consideraremos el caso real. Una interpretación geométrica de las solu-ciones es inmediata para el caso en el que n = 1, una solución de 1.1(esto es,un conjunto de funciones '1; :::; 'n sobre el intervalo I) puede ser vista comouna curva en la región D de dimensión n + 1, con cada punto p sobre la curvacon coordenadas (t; '1 (t) ; '2 (t) ; :::; 'n (t)) y con '
0
i (t) la componente del vec-tor tangente a la curva en la dirección xi. Esta interpretación es familiar paran = 1 y la curva en D, solución de 1.1, se le conoce como curva solución.
3

El problema de valor inicial asociado con un sistema como 1.1 es el problemade encontrar una solución(en el sentido que mencionamos antes) que pase através del punto p0 =
�t0; x
01; x
02; :::; x
0n
�en D.
En general, no es posible resolver 1.1 excepto en casos especiales. Sin em-bargo es deseable obtener tanta información como sea posible acerca del com-portamiento de las soluciones de los sistemas analizados.
1.1.1 Notación matricial
Sea la ecuación diferencial de orden n
x(n) = g�t; x; x
0; :::; x(n�1)
�(1.2)
puede ser reducida a un sistema de n ecuaciones de primer orden por medio delcambio de variable x1 = x; x2 = x
0; :::; xn = x(n�1). Así, 1.2 es equivalente al
sistemax0
1 = x2x0
2 = x3...x0
n�1 = xnx0
n = g (t; x1; x2; :::; xn)
el cual es un caso especial de 1.1.Como ejemplo tomemos el sistema de ecuaciones de segundo orden
m1x00= �k1x+ k2 (y � x)
m2y00= �k2 (y � x)
que describe el desplazamiento de dos masas en el tiempo t que están suspendi-das verticalmente por un resorte desde un soporte rígido y conectadas entre sípor otro resorte con condiciones iniciales x1 (0) ; x
0
1 (0) ; y2 (0) ; y0
2 (0). Este sis-tema puede ser reescrito como un sistema de ecuaciones diferenciales de primerorden haciendo la sustitución x1 = x; x2 = x
0; y1 = y; y2 = y
0; expresando1 el
sistema en términos de xi obtendremos el sistema equivalente
x0
1 = x2
x0
2 = ��k1m1
+k2m1
�x1 +
k2m1
x3
x0
3 = x4
x0
4 = �k2m2
(x3 � x1)
(1.3)
Observemos que el sistema anterior puede ser descrito totalmente por la
1Considérese y1 = x3; y2 = x4:
4

matriz de coe�cientes
A =
26666640 1 0 0
��k1m1
+k2m1
�0
k2m1
0
0 0 0 1k2m2
0 � k2m2
0
3777775además se de�nen los vectores columna
x =
2664x1x2x3x4
3775 x0=
2664x0
1
x0
2
x0
3
x0
4
3775con lo que el sistema 1.3 puede ser escrito de forma compacta
x0= Ax
donde la parte derecha es el producto usual matriz-vector. Notemos que siemprees posible representar un sistema de ecuaciones diferenciales de primer ordencomo una ecuación diferencial vectorial de primer orden.De�namos a x como un punto de dimensión n sobre R con coordenadas
(x1; x2; :::; xn), y las funcionesbfj (t;x) = fj (t; x1; x2; :::; xn) (j = 1; :::; n)
así, el sistema 1.1 puede ser escrito de la forma
x0
1 =bf1 (t;x)
x0
2 =bf2 (t;x)...
x0
n =bfn (t;x)
(1.4)
Observemos que las funciones bf1; :::; bfn pueden ser tomadas como n componentesdel vector de funciones f de�nidas por
f (t;x) =� bf1 (t;x) ; :::; bfn (t;x)�
y de manera similar
x0=�x0
1; :::; x0
n
�Así, el sistema de n ecuaciones diferenciales de primer orden 1.1 puede serexpresado de forma compacta como
x0= f (t;x) (1.5)
Encontrar una solución para el sistema anterior signi�ca hallar un intervaloI 2 R y una función vectorial ' de�nida sobre I tal que:
5

� '0(t) exista para cada t en I;
� el punto (t;' (t)) permanezca en D para cada t en I;
� '0(t) = f (t;' (t)) para cada t en I:
1.1.2 Existencia y unicidad de soluciones
Desafortunadamente no siempre es posible encontrar una solución en términosde funciones elementales, por ello es importante probar que ciertas clases deecuaciones diferenciales efectivamente tienen solución, este problema se conocecomo problema de existencia. Ligado al problema de existencia se encuentrael problema de unicidad, el cual signi�ca que bajo un conjunto particular decondiciones iniciales debe resultar exactamente en una solución.
Teorema 1 Sea f una función vectorial con n componentes de�nidas en una
región D de dimensión n+1 y sean los vectores f ;@f
@xkcon k = 1; :::; n continuos
en D: Entonces, dado cualquier punto�t0;x
0�en D; existe una única solución
' del sistema 1.5 que satisface la condición ' (t0) = x0: La solución existe encualquier intervalo I que contenga a t0 para el cual los puntos (t;' (t)) ; con ten I, permanecen en D. Además, la solución ' es una función continua para�t; t0;x
0�:
En particular, nos interesan las soluciones de ecuaciones diferenciales deorden n de la forma
x(n) = g�t; x; x
0; :::; x(n�1)
�donde g es una función de�nida en alguna región D en el espacio (t; x1; :::; xn)dimensión (n+ 1) :Un resultado importante sobre existencia y unicidad para este tipo de ecua-
ciones diferenciales es el siguiente
Teorema 2 Sean g;@g
@x1; :::;
@g
@xnfunciones continuas en una region D y sea
p0 =�t0; x
01; x
02; :::; x
0n
�un punto dado dentro de D. Entonces existe un inter-
valo que contiene a t0 y exactamente una solución ', de�nida en este intervalo,
de la ecuación diferencial x(n) = g�t; x; x
0; :::; x(n�1)
�que pasa a través de�
t0; x01; x
02; :::; x
0n
�, esto es que la solución ' satisface las condiciones iniciales
' (t0) = x01; '0(t0) = x02; '
(n�1) (t0) = x0n. La solución existe para aquel-
los valores de t para los cuales los puntos�t; ' (t) ; '
0(t) ; :::; '(n�1) (t)
�están
en D. Además, la solución ' es una función continua de (n+ 2) variablest; t0; x
01; :::; x
0n.
6

1.1.3 Sistemas lineales
Un sistema lineal de ecuaciones diferenciales es aquel sistema x0= f (t;x) en
el cual f (t;x) es lineal en los componentes de x. Consideremos por ejemplo elsistema
x0
1 = x1 � tx2 + etx0
2 = t2x1 + x3x0
3 = x1 + x2 � x3 + 2e�t(1.6)
el cual es lineal en x1; x2; x3 y tiene la forma x0= f (t;x) con x = (x1; x2; x3) ;
f (t;x) =�x1 � tx2; t2x1 + x3; x1 + x2 � x3
�+ (et; 0; 2e�t). Observemos que
el vector�x1 � tx2; t2x1 + x3; x1 + x2 � x3
�puede ser representado como el
producto A (t)x de una matriz por un vector con
A (t) =
24 1 �t 0t2 0 �11 1 �1
35y x es el vector columna (x1; x2; x3)
|. Así, el sistema 1.6 puede ser escrito comox0= A (t)x+ g (t) ; donde g (t) es el vector columna(et; 0; 2e�t)|.Más generalmente un sistema x
0= f (t;x) con f (t;x) lineal en los compo-
nentes de x, tiene la forma
x0
1 = a11 (t)x1 + a12 (t)x2 + :::+ a1n (t)xn + g1 (t)
x0
2 = a21 (t)x1 + a22 (t)x2 + :::+ a2n (t)xn + g2 (t)...
...x0
n = an1 (t)x1 + an2 (t)x2 + :::+ ann (t)xn + gn (t)
y puede ser representado como
x0= A (t)x+ g (t) (1.7)
donde
A (t) =
26664a11 (t) a12 (t) : : : a1n (t)a21 (t) a22 (t) : : : a2n (t)...
...an1 (t) an2 (t) : : : ann (t)
37775 g (t) =
26664g1 (t)g2 (t)...
gn (t)
37775x es el vector columna con componentes x1; x2; :::; xn.
Existencia y unicidad de sistemas lineales
Asumamos que en el sistema 1.7 la matriz A (t) y el vector g (t) son continuossobre un intervalo I. Entonces la función vectorial f (t;x) = A (t)x + g (t)es continua para (t;x) en D, donde D es la banda f(t;x) jt 2 I; jyj <1g ; y@f
@xk= (a1k (t) ; a2k (t) ; :::; ank (t))
| con k = 1; :::; n. Por tanto@f
@xktambién es
continua en D para k = 1; :::; n:
7

Por el teorema (1) la ecuación diferencial 1.7 tiene una única solución ' (t)que pasa a través de algún punto dado
�t;x0
�con t0 en I y esta solución existe
en un intervalo que contiene al punto t0 en su interior. La solución ' existe enalgún intervalo J que contiene al punto t0 y está dentro del intervalo I para elcual los puntos (t;' (t)) con t en J permanecen en D. La solución existe entodo el intervalo I (�nito o in�nito) y puede probarse que j' (t)j ; la norma dela solución ', está acotada por una constante que no depende de t(acotamientoa priori). Esto será posible siempre si I es un intervalo cerrado y acotado.
Teorema 3 Si A (t)x;g (t) son continuas sobre algún intervalo a � t � b; sia � t0 � b; y si
��x0�� <1; entonces el sistema 1.7 tiene una única solución ' (t)que satisface la condición inicial ' (t0) = x0 y existe en el intervalo a � t � b.
Una interpretación geométrica del teorema anterior es el establecer que lasolución permanece en una "caja" de dimensión (n+ 1) de base a � t � b yaltura 2 jxj, donde jxj � k1 exp [k2 (b� a)].Notemos que si A (t)x; g (t) en 1.7 son continuas para �1 < t < 1 ,
entonces las propiedades mencionadas anteriormente se mantienen para cadasubintervalo �nito, en este caso la solución ' (t) no necesita permanecer acotadacuando t! �1. Lo mismo sucede si A (t)x y g (t) son continuas en a < t < b,pero no necesariamente en a � t � b:El teorema anterior nos conduce al siguiente
Corolario 1 Si A (t)x y g (t) son continuas en un intervalo I abierto o cerrado,�nito o in�nito, y si t0 2 I,
��x0�� < 1, entonces 1.7 tiene una única solución' (t) que satisface la condición inicial ' (t0) = x0 y existe en I:
1.1.4 Solución de sistemas de ecuaciones diferenciales
Sistemas lineales homogéneos
Para discutir la estructura de las soluciones del sistema 1.7 comenzaremos conel sistema lineal homogéneo
x0= A (t)x (1.8)
Asúmase que la matriz A (t) de dimensión n� n es continua en el intervalo I ypor el teorema (3) se sigue inmediatamente que dado cualquier punto
�t0;x
0�;
t0 2 I, existe una y sólo una solución ' de la ecuación anterior tal que ' (t0) =x0: En particular, dado el punto2 (t0; �) y t0 2 I, 1.8 tiene un única solución' = � en I, que satisface la condición inicial ' (t0) = �. Por inspección notamosque � siempre es una solución de la ecuación diferencial planteada y por teoremaanterior es la única solución que pasa a través de (t0; �).Para obtener la forma de las soluciones del sistema lineal homogéneo 1.8
observamos que si '1 y '2 son dos soluciones cualesquiera de 1.8 en un intervalo
2Denotaremos a � 2 Rn como el vector columna cuyas componentes son todos cero.
8

I, y c1 y c2 son dos constantes cualesquiera, entonces la linealidad de 1.8 nosconducea a
(c1'1 + c2'2)0= c1'
0
1 + c2'0
2 = c1A'1 + c2A'2 = A (c1'1 + c2'2)
esto es, c1'1 + c2'2 es también un solución de 1.8 en I. Las soluciones de 1.8forman un espacio vectorial V sobre C.El resultado anterior se expresa de forma general por medio del siguiente
Teorema 4 Si A (t) es un matriz compleja de dimensión n�n y continua sobreun intervalo I, entonces la solución del sistema
x0= A (t)x
sobre I forman un espacio vectorial de dimensión n sobre C.
De lo anterior puede decirse que las soluciones '1;'2; ::;'n de 1.8 generanel espacio vectorial V; son linealmente independientes y forman una base delespacio solución V con dimensión n. Las soluciones '1;'2; ::;'n linealmenteindependientes forman un conjunto fundamental de soluciones3 .Una interpretación del teorema anterior es la siguiente: Una matriz de n
renglones cuyas columnas son soluciones de 1.8 es llamada matriz solución. Sise forma una matriz de dimensión n�n usando las n soluciones linealmente in-dependientes como columnas, obtendremos una matriz solución sobre I, cuyascolumnas serán soluciones linealmente independientes de 1.8 sobre I. Una ma-triz solución cuyas columnas son linelamente independientes sobre I es llamadamatriz fundamental de 1.8 sobre I. Denotaremos la matriz fundamental, for-mada por las soluciones '1;'2; ::;'n como columnas, por � . Así, cualquiercombinación lineal de la forma
(t) = c1'1 (t) + c2'2 (t) + :::+ cn'n (t)
para cada t 2 I puede expresarse como
(t) = � (t) c
donde c es el vector columna con componentes c1; c2; :::; cn.Algunos resultados importantes sobre la matriz fundamental son los sigu-
ientes
Teorema 5 (Fórmula de Abel) Si � es una solución de 1.8 sobre I y si t0es cualquier punto de I , entonces
det� (t) = det� (t0) exp
24Z t
t0
nXj=1
ajj (s) ds
35 (1.9)
para cada t en I:3Es claro que existe una in�nidad de conjuntos fundamentales de soluciones debido a las
distintas combinaciones lineales de '1;'2; ::;'n:
9

Teorema 6 Una matriz solución � de 1.8 sobre un intervalo I es una matrizfundamental de 1.8 sobre I si y sólo si det� (t) 6= 0 para cada t en I.
Teorema 7 Si � es una matriz fundamental de x0= A (t)x sobre I y C es
una matriz no singular con elementos constantes, entonces �C es también unamatriz fundamental para x
0= A (t)x sobre I. Cada matriz fundamental de 1.8
es de esta forma para alguna matriz no singular C.
Sistemas lineales no homogéneos
Ahora discutiremos la forma de las soluciones de los sistemas lineales no ho-mogéneos
x0= A (t)x+ g (t) (1.10)
donde A (t) es una matriz continua sobre t y g (t) es un vector continuo sobreun intervalo I. Todo el desarrollo en la obtención de las soluciones de estesistema lineal no homogéneo se basa en asumir que es posible encontrar unamatriz fundamental que corresponde al sistema homogeneo x
0= A (t)x. El
vector g (t) usualmente representa un término forzado ya que si 1.10 representaun sistema físico, g (t) representa una fuerza externa. Por el teorema (3) y elcorolario resultante sabemos que dado cualquier punto
�t0;x
0�; t0 2 I, hay una
única solución � de 1.10 que existe en todo I tal que � (t0) = x0.Para construir las soluciones de 1.10 tomemos la matriz fundamental � (t)
del sistema homogéneo x0= A (t)x sobre I; � existe como una consecuencia
del teorema 5. Supongamos que '1 y '2 son dos soluciones cualesquiera de 1.10sobre I . Entonces '1 � '2 es una solución del sistema homogéneo sobre I.Existe por lo tanto un vector constante c tal que
'1 � '2 = �c (1.11)
La fórmula anterior nos dice que para encontrar cualquier solución de 1.10sólo necesitamos conocer una de sus soluciones. Un método sencillo, conocidocomo variación de constantes, para determinar una solución de 1.10 requiere deconocer la matriz fundamental del sistema homogéneo x
0= A (t)x. Dada � la
matriz funamental sobre I, intentemos encontrar una solución de 1.10 de laforma
(t) = � (t)v (t) (1.12)
donde v es un vector por determinar. Notemos que si v es un vector constante,entonces satisface el sistema homogéneo y así, para nuestro propósito v (t) � cestá descartado. Supongamos que la solución existe, entonces sustituyendo 1.12en 1.10 encontramos que para toda t en I
0(t) = �
0(t)v (t) + � (t)v
0(t) = A (t) � (t)v (t) + g (t)
Debido a que � es una matriz fundamental del sistema homogéneo �0(t) =
A (t)� (t) y los términosA (t) � (t)v (t) se cancelan. Entonces si (t) = � (t)v (t)es una solución de 1.10, debemos determinar v (t) de la relación
� (t)v0(t) = g (t)
10

Dado que � (t) es no singular sobre I podemos premultiplicar por ��1 (t) eintegrando tenemos
v (t) =
Z t
t0
��1 (s)g (s) ds
para t0; t 2 I y por lo tanto 1.12 queda
(t) = � (t)
Z t
t0
��1 (s)g (s) ds (1.13)
para t0; t 2 I: Así, si 1.10 tiene una solución de la forma 1.12 entonces estádada por 1.13.De manera inversa, de�namos como en 1.13 donde � es una matriz funda-
mental del sistema homogéneo sobre I . Entonces diferenciando 1.13 y usandoel teorema fundamental del cálculo tenemos
0(t) = �
0(t)
Z t
t0
��1 (s)g (s) ds+�(t)��1 (t)g (t)
= A (t) � (t)
Z t
t0
��1 (s)g (s) ds+ g (t)
y usando nuevamente 1.13
0(t) = A (t) (t) + g (t)
para cada t 2 I. Obviamente (t0) = �.La fórmula de variación de constantes se formaliza por medio del siguiente
Teorema 8 Si � es una matriz fundamental de x0= A (t)x en I, entonces la
función
(t) = � (t)
Z t
t0
��1 (s)g (s) ds
es la única solución de 1.10 que satisface la condición inicial (t0) = � y esválida sobre I.
Por lo tanto vemos que cada solución ' de 1.10 sobre I tiene la forma
' (t) = 'h (t) + (t)
donde es la solución de la ecuación 1.10 que satisface la condición inicial (t0) = � y 'h es la solución del sistema homogéneo que satisface la mismacondición inicial t0 para ', por ejemplo 'h (t0) = x
0.
1.2 Control
La idea de control nos puede ser familiar si se piensa en el movimiento delvolante del automóvil o bien al momento de girar la llave de la regadera. Elresultado puede ser bueno o malo no obstante en cualquier caso el concepto decontrol debe reunir los siguientes cuatro elementos.
11

1. El sistema a controlar, también conocido como planta. Se re�ere al sistemaque se desea controlar.
2. El objetivo de control o comportamiento que se desea lograr en el sistema.Se trata de la meta a alcanzar.
3. El conjunto de variables medibles o salidas. Son las propiedades del sis-tema que pueden ser medibles.
4. El conjunto de variables de control o entradas. Son aquellas propiedadesque pueden modi�carse con la intensión de actuar sobre el sistema a con-trolar.
Otro elemento importante es el controlador o regulador que genera las en-tradas de control especí�cas para lograr la meta deseada. No obstante estequinto elemento no está presente en la etapa de formulación del problema decontrol, sino hasta que el problema ha sido resuelto. Al hablar de una soluciónde control nos referiremos a encontrar una ley de control o algoritmo de control.Una vez que la ley de control ha sido hallada puede ser usada por el controladorpara evaluar las entradas de control basándose en las salidas medibles de laplanta. El sistema compuesto por la planta y el controlador, es conocido comosistema de control o sistema a lazo cerrado.
1.2.1 Modelos de sistemas a controlar
El modelo de una planta utilizado para �nes de control es usualmente lo mássencillo posible. Consideremos que se desea construir un modelo de un sistemadonde la entrada es la posición angular de la llave del agua caliente y la salidaes la temperatura del agua que sale. El sistema depende particularmente delgiro de la llave del agua4 . Sea u (t) el ángulo de la llave en el tiempo t y y (t) latemperatura del agua. Cuando el desplazamiento del ángulo u (t) desde el valorinicial u es pequeño, se puede asumir que el correspondiente desplazamiento dey (t) desde el valor inicial y es proporcional a u (t)� u
y (t)� y = � (u (t)� u) (1.14)
donde � es una constante. Lo que se obtiene es un modelo sencillo del sistemaa controlar, el cual puede ser reescrito como
y (t) = �+ � (u (t)� u) (1.15)
Los modelos 1.14 y 1.15 pertenecen a la clase de modelos lineales estáti-cos(sin memoria): el valor de las salidas y (t) dependen del valor de la entradau (t) medida en el mismo tiempo t: De cualquier forma, los sistemas del mundoreal siempre tienen algún tipo de inercia o memoria, es decir, no es posiblecambiar instantáneamente los estados del sistema. Un modelo más apropiado
4De ahí que a este sistema se le nombre tap system (sistema de grifo o de llave de agua).Vease [13] pp. 6.
12

deble incluir valores predeterminados de entrada y la salida y/o sus derivadas.Modelos más complicados son llamados modelos dinámicos.Consideremos la temperatura de la mezcla de un �uido la cual no puede ser
cambiada instantáneamente después del cambio en la tasa de �ujo del compo-nente; se tiene entonces la ecuación diferencial de primer orden
Tdy (t)
dt+ y (t) = �+ �u (t) (1.16)
donde T > 0 es la constante de tiempo. Más aún, si hay un segmento de tuberíalargo entre la salida del �ujo y el lugar en que se realiza la mezcla, se deberátomar encuenta un retardo en el tiempo:
Tdy (t)
dt+ y (t) = �+ �u (t� �)
donde � > 0 es el retardo.Finalmente, cuando se requiere un modelo válido no sólo en una región con
pequeñas variaciones se tendrá que tomar en cuenta la nolinealidad del sistema.Un modelo estático no lineal del primer sistema descrito arriba considerando laley de transferencia de calor queda
y (t) = �+ �f (u (t)) ;
f (u) =k1uy1 + k2u2y2k1u+ k2u2
donde y1; y2 son las temperaturas del agua caliente y fría, k1u; k2u2 son lastasas de �ujo del agua caliente y fría respectivamente y k1; k2 son los coe�cientesescalares.En varios casos en necesario diseñar un algoritmo de control discreto en el
tiempo para el controlar de forma computarizada un sistema real continuo enel tiempo. Esto se puede realizar transformando ambos modelos, el de la plantay el del controlador, en dos modelos continuos en el tiempo o en dos modelosdiscretos en el tiempo.
1.2.2 Objetivos de control
Otro componente en el problema de controlar un sistema es el objetivo de controla alcanzar, tradicionalmente se consideran dos metas: regulación y seguimiento.
Regulación
Regulación(estabilización o posicionamiento) se entiende como el manejo delvector de las variables de estado5 x (t) del sistema de control para colocarlo enalgún punto de equilibrio o punto �jo bx:En algunos casos es de mayor signi�cado
5En lo que sigue denotaremos el vector de estados x (t) únicamente como x (t) ; con-siderando que representa al conjunto de variables x1; :::; xn:
13

sólo la regulación de la variable de salida y (t) : Formalmente se puede escribireste primer objetivo de control como
limt!1
x (t) = bxo también
limt!1
y (t) = byAlgunas consideraciones más realistas consisten en establecer las relaciones
siguienteslimt!1
jx (t)� bxj � �o bien
limt!1
jy (t)� byj � �donde � es el parámetro de exactitud.
Seguimiento
El seguimiento consiste en manejar la variable x (t) de tal forma que se ajustea una trayectoria deseada x (t) ; es decir
limt!1
[x (t)� bx (t)] = 0 (1.17)
o conducir la salida y (t) hacia una función deseada by (t) ; es decirlimt!1
[y (t)� by (t)] = 0 (1.18)
La salida deseada by (t) es interpretada frecuentemente como señal de referenciao señal que gobierna. Algunas veces esta señal de referencia es de�nida explíci-tamente como una función del tiempo. En otros casos puede ser de�nida comouna solución de otro sistema auxiliar llamado modelo de referencia o modeloobjetivo. El problema de encontrar el controlador que asegure el logro de lasmetas 1.17 y 1.18 es llamado problema de control con modelo de referencia.Si tomamos en cuenta el control de sistemas que presentan un compor-
tamiento oscilatorio, podemos estudiar almenos otros dos objetivos de control.
Sincronización
Entiéndase la sincronización como una coincidencia de las variables de dos ovarios sistemas, o bien, como la coincidencia en los cambios de varias caracterís-ticas cualitativas de los sistemas. El problema de sincronización es diferente alos modelos de control de referencia en el sentido que éste permite la coinciden-cia de diferentes variables, tomadas en distintos instantes de tiempo, es decir,con cambios en el tiempo, los cuales puede ser constantes o que tiendan a unaconstante(fases asintóticas). Además, en el problema clásico de sincronizaciónse permite la conexión bidireccional entre los sistemas. Esto signi�ca que el
14

límite de la solución deseada no puede ser determinada. Por otro lado, la sin-cronización con conexiones unidireccionales (maestro-esclavo o respuesta sin-cronizada) puede ser también interesante.El fenómeno de sincronización que ocurre en sistemas sin control(autosincronización)
es bien conococido y extensamente estudiado. No obstante, controlar la formaen que se sincroniza ha comenzado a investigarse recientemente.
Modi�cación del comportamiento asintótico de un sistema
Esta clase de objetivos de control incluye varios casos:
� Cambio del tipo de equilibrio, es decir, modi�car un punto �jo inestablea uno estable y viceversa,
� Cambio del tipo de ciclo límite, modi�car un ciclo límite a un atractorcaótico y viceversa,
� Cambio del punto de bifurcación, y/o el tipo de punto de bifurcación enel parámetro de espacio,
� Creación de oscilaciones con propiedades deseadas.
Un ejemplo importante de los casos anteriores lo representa el problemaconocido como balanceo contraviento6 el cual implica la excitación de las os-cilaciones por encima de la energía deseada(frecuencia, o algún otro parámetrode intensidad). Otro problema relacionado es la modi�cicación de la dimensiónfractal del conjunto compacto invariante(atractor).Una caracteríastica importante al controlar las oscilaciones y el caos es el
bajo nivel de control utilizado. La razón se basa en que el tiempo de vida de unsistema oscilatorio cubre un número de ciclos largo y el nivel de las acciones decontrol por ciclo deben ser pequeñas como efecto de mantener la energía totaldel control dentro de cierto valor especí�co.
1.2.3 Técnicas básicas de control
Asúmase que el problema de control ya ha sido identi�cado, ahora lo que senecesita es resolverlo adecuadamente. A primera vista pareciera que un modelosencillo de la planta o sistema a controlar debería conducir a una solución decontrol sencilla7 . No obstante, esto no es cierto en ocasiones, para lo cualproblemas adicionales pueden aparecer.Como ejemplo consideremos la planta descrita por la ecuación diferencial de
primer orden 1.16. Es conveniente reescribir la ecuación de la planta en formatal que la derivada esté despejada(también conocida como forma de Cauchy)
�y = ay + bu+ a0 (1.19)
6El término swinging/upwinding es manejado en [13], pp. 10.7El concepto manejado en [13] se re�ere a este apartado como naive control en el sentido
que se exponen las técnicas y conceptos de control básicos sin el enfoque de las técnicas decontrol modernas.
15

donde los coe�cientes constantes a; b; a0 dependen de los parámetros de 1.16a = �1=T; b = �=T; a0 = �=T . Notemos que en 1.19 no necesitamaos suponerque T > 0, es decir 1.19 puede describir también sistemas inestables(a > 0) oneutralmente estables(a = 0) en su dinámica interna.Tomemos como objetivo de control la regulación de la salida y (t) a un valor
deseado by: Una solución aparente sería calcular el punto de equilibrioy = �a0
a� bu
a
del sistema 1.16 con una entrada constante u (t) � u y elegir entonces a u detal forma que conduzca a y = by, es decir, elegir u (t) = bu donde
bu = � (aby + a0)b
(1.20)
Así, el objetivo y (t) � by será alcanzado para toda t � 0 si se mantiene parael instante de tiempo inicial t = 0, es decir, si y (0) = by. Agregemos que elobjetivo de control será alcanzado asintóticamente(cuando t! 0) para cualquiercondición inicial y (0) cuando la planta 1.19 sea asintóticamente estable(a < 0).La solución del problema de seguimiento con la función de salida deseada by (t)puede ser construida de forma similar, es decir, sustituyendo by (t) en 1.19 yresolviendo para bu (t)
bu (t) =�dby (t)dt
� aby (t)� a0�b
Por ejemplo, lograr el comportamiento oscilatorio deseado by (t) = A +B sin!t, la siguiente ley de control
bu (t) = (B! cos!t� aA� aB sin!t� a0)b
puede ser aplicado al sistema 1.19.De cualquier forma, esta solución sencilla tiene sus inconvenientes:
1. Si la planta es inestable, entonces la entrada constante 1.20 dejará deser inestable, es decir, pequeños desajustes arbitrarios en las condicionesiniciales conducirán a salidas que crecen ilimitadamente.
2. Supóngase que la planta 1.16 es estable, pero sus parámetros son im-precisos(es decir, los valores disponibles de a; b usados en el controladordi�eren de los verdaderos). Entonces el error de evaluación de bu puede sersigni�cativo y la meta deseada no podrá ser alcanzada.
3. Cambios repentinos en las variables de la planta implicarán el fracaso enla consecución del objetivo de control.
16

Retroalimentación
La experiencia obtendia por la ingeniería ha mostrado que pueden obtenersesoluciones mucho más e�cientes por medio del principio de retroalimentación, esdecir, por medio de algoritmos de control los cuales usan las medidas disponiblesde y (s) ; 0 � s � t para calcular u (t). Las leyes de retroalimentación son distin-tas y variadas. Una de las leyes de retroalimentación más sencilla y frecuente-mente utilizada es la ley de retroalimentación proporcional :
u (t) = K (y (t)� by) (1.21)
La retroalimentación de relevo o deslizante(o signo) es también comunmenteutilizada:
u (t) = Ksign (y (t)� by) (1.22)
Se puede ver fácilmene que la retroalimentación negativa en 1.21 y 1.22(con K < 0 para b > 0) puede cambiar la planta inestable 1.19(con a > 0)a una estable. De cualquier modo, un error de estado estacionario8 e1 =limt!1 [y (t)� by] = y1� by puede aparecer. Nótese que el equlibrio del sistemaa lazo cerrado 1.19, 1.21 es estable si a + bK < 0 y este proporciona unasolución estacionaria y1 = by� (aby + a0) = (a+ bK) con error estacionario e1 =(aby + a0) = (a+ bK) el cual se va haciendo más pequeño cuando K toma valoresgrandes. Para eliminar completamente el error estacionario es posible agregarla tendencia
u (t) = � (aby + a0) =b+K (y (t)� by) (1.23)
e introducir la integral de retralimentación:
u (t) = k1 (y (t)� by) + k2 Z t
0
(y (s)� by) dsLos controladores con integral proporcional(IP) son ámpliamente utilizados
debido a que requieren un conocimiento menor de los parámetros de la planta.Note que cuando a = a0 = 0, el sistema tiene un error estacionario cero para
toda by y toda K, tal que bK < 0. Por lo tanto en este caso, cualquier salidadeseada by puede ser alcanzada por la retralimentación 1.21 con una K arbitrari-amente pequeña, es decir, por medio de una fuerza de control arbitrariamentepequeña.Este sencillo ejemplo demuestra que la retroalimentación permite mejorar la
estabilidad y la precisión del sistema a lazo cerrado mientras que la incertidum-bre de los parámetros de la planta evita cualquier mejora en el desempeño delsistema. Entre otros obstáculos, los más importantes son:
� No linealidad,
� Mediciones incompletas,
� Control incompleto.8Steady-state error lo referiremos aquí como error estacionario.
17

Por mediciones incompletas debe entenderse que no todas las variables deestado del sistema son variables medibles o que el ruido en la medición es muygrande. Control incompleto signi�ca que es imposible cambiar el modelo de laplanta a alguna forma deseada por medio de cambios admisibles de las variablesde control. La teoría moderna del control, que incluye el control no lineal y elcontrol adaptable, permite sobrepasar estas di�cultades.
Incertidumbre
Es importante ilustrar las ideas principales del control no lineal y del controladaptable puesto que son dos herramientas que ayudan a enfrentar los problemasde incertidumbre en los parámetros de la planta. Iniciaremos por el controladaptable.La presencia de incertidumbre en los parámetros es frecuente, por tanto el
uso de un modelo de planta impreciso para propósitos de control podría resultaren un pobre desempeño del sistema de control. Si este no fuera el caso, el sistemade control se denominaría, contol robusto. De cualquier forma, es difícil diseñarun controlador robusto si los parámetros de la planta cambian en un rangoamplio, en este caso es posible intentar desarrollar un controlador adaptable.Supóngamos que la planta está descrita por la ecuación diferencial ordinaria
de primer orden 1.19 y el objetivo de control es la regulación
limt!1
y (t) = by (1.24)
Como se mencionó antes, la ley de control 1.23 permite asegurar el logro delobjetivo 1.24 cuando los valores de los parámetros a; b; a0 son conocidos. Paraobtener un controlador que trabaje bien para valores arbitrarios de los parámet-ros de la planta es posible intentar ajustar los parámetros del controlador 1.23basados en las mediciones en línea.Para este propósito tomemos la ley de control 1.23 y escribámosla de la
formau (t) = �1by + �2 + �3 (y � by)
donde �1 = �a=b; �2 = �a0=b; �3 = K. Ahora reemplacemos los coe�cientesconstantes �i; para i = 1; 2; 3 por los coe�cientes ajustados
u (t) = �1 (t) by + �2 (t) + �3 (t) (y (t)� by) (1.25)
donde �i; para i = 1; 2; 3 son los parámetros de ajuste. La pregunta es ¿cómoactualizar �i (t) de tal forma que se asegure la meta 1.24 para valores arbitrariosde a; b? Para resolver el problema el método de velocidad de gradiente(SG)9
proporciona una valiosa ayuda. La forma de diseñar el algoritmo SG es pormedio de la reformulación del objetivo 1.24 de la siguiente forma:
limt!1
Q (y (t)) = 0 (1.26)
9Speed Gradient method
18

donde Q (y) = (y � by)2 =2 es conocida como función objetivo. Entonces se cal-cula la derivada
�Q respecto al tiempo la cual es la rapidez de cambio de Q (y (t))
de las soluciones del sistema 1.18, 1.25 con �i �jos; i = 1; 2; 3.Evidentemente,
�Q = (y � by) �y = (y � by) (ay + b�1by + b�2 + b�3 (y � by) + a0)
Finalmente se calculan las derivadas parciales@�Q
@�iy formamos el vector
gradiente r��Q = col
@�Q
@�idonde � = col (�1; �2; �3) y escribimos el algoritmo SG
de la siguiente forma��1 = � (y � by) by;��2 = � (y � by) ; (1.27)��3 = � (y � by)2 ;
donde > 0 es el factor de ganancia. El algoritmo 1.27 sugiere un cambio
del vector � (t) en el sentido de un decremento en�Q el cual implica eventual-
mente(después de lograr la desiguladad�Q < 0 para todo y 6= 0 ) un decremento
en la función inicial Q (y (t)).Se sigue que el objetivo 1.26 se alcanza para todas las condiciones iniciales
en el sistema a lazo cerrado si b > 0. Lo mismo es válido para b < 0 cuandoel factor de ganancia es seleccionado negativo. Así, para resolver el problemapor medio del controlador 1.25, 1.26 es su�ciente conocer el signo del coe�cienteb. La idea de reemplazar los coe�cientes desconocidos por sus estimaciones esllamado principio de certeza10 el cual es ámpliamente utilizado en la teoría decontrol adaptable.
Nolinealidad
En algunos casos los algoritmos de control para sistemas no lineales pueden serdiseñados de forma muy similar a aquellos usados por los sistemas lineales. Porejemplo al modelo de la planta 1.18 se le aumenta el término no lineal sin y comosigue
�y = ay + a0 + d sin y + bu;
donde a; a0; d; b son parámetros constantes desconocidos. Es sencillo notarque el sistema cerrado por retroalimentación puede poseer múltiples puntos deequilibrio, algunos de los cuales pueden ser estables y pueden alejarse de lodeseado. Para evitar el incremento en la complejidad de la planta es posibleintroducir un correspondiente término senoidal en la ley de control:
u (t) = �1 (t) by + �2 (t) + �3 sin y + �4 (t) (y (t)� by)10Certainty equivalence principle.
19

El algoritmo con parámetros actualizados puede ser deseñado similarmente a1.27 como sigue
��1 = � (y � by) by;��2 = � (y � by) ;��3 = � (y � by) sin y;��3 = � (y � by)2 ;
En muchos casos la nolinealidad incrementa la complejidad en el compor-tamiento de la planta pero no incrementa la complejidad en el diseño del contro-lador. Por otro lado la nolinealidad puede provocar severos problemas cuandose toman en cuenta restricciones adicionales, es decir, se necesita de un "controlpequeño".Como ejemplo consideremos la ecuación diferencial de segundo orden que
describe al movimiento oscilatorio de un péndulo:
ml2
2
��'+mgl sin' = u (1.28)
donde ' (t) es el ángulo del péndulo medido desde la vertical, el control u (t) esel torque(giro) aplicado en el eje de rotación, m es la masa, l es la longitud yg es la gravedad. El objetivo de control serán las oscilaciones que presente elpéndulo arriba de un nivel de energía dado bE:
E (t)! bE; cuando t!1 (1.29)
donde
E =m�l�'�2
2+mgl (1� cos')
es la energía total del péndulo. El objetivo 1.29 di�ere un poco de los objetivostradicionales de regulación y seguimiento.La solución convencional basada en la linealización de un modelo de la planta
no funciona en este caso. Así, considere el modelo de la planta linealizado cercadel punto de equilibrio y = 0
��'+ !20' = bu
donde !0 =p2g=l; b = 2=
�ml2
�. Utilizando como señal de entrada una reso-
nancia armónica,u (t) = sin!0t; (1.30)
es posible lograr que la energía del péndulo aumente arbitrariamente aún paraamplitudes arbitrariamente pequeñas. No obstante, esto no es cierto cuando elcontrol a lazo abierto 1.30 actúa sobre el sistema 1.28, debido a que la frecuenciade sus oscilaciones libres dependen de la amplitud.
20

Ahora probemos otra vez con las leyes de retroalimentación y apliquemos el
método SG para la función objetivo Q =�E � bE�2 =2 y tomemos en cuenta la
naturaleza Hamiltoniana del sistema a controlar, podemos encontrar entoncessoluciones sencillas de la forma
u (t) = � �E (t)� bE� �
' (1.31)
ou (t) = � sign
��E (t)� bE� �
'�
(1.32)
Es posible mostrar que el objetivo 1.29 se alcanza para cualquier nivel de energíabE > 0 y cualquier > 0 y para casi todas la condiciones iniciales ' (0) ;�' (0) :
Las leyes de control 1.31, 1.32 también son aplicables a los sistemas disi-pativos. De cualquier modo, en este caso la ganancia no puede ser elegidaarbitrariamente pequeña.Otras di�cultades pueden surgir debido a la carencia de mediciones11(la ve-
locidad�' (t) no es una medición disponible) y/o la falta de un control adecuado,
es decir, casos en los que la inercia del motor del péndulo no puede ser evitaday el modelo de la planta es descrito por la ecuaciones
ml2
2
��'+mgl sin' = u; T
�u+ u = v;
donde v (t) es el nuevo control. Notemos que el cambio de control v (t), impidecambiar el lado derecho de la ecuación anterior de forma arbitraria.
1.3 Controlabilidad y observabilidad
A continuación se introducen los conceptos de controlabilidad y observabili-dad. Estos conceptos describen la interacción entre el mundo externo(entraday salidas) y las variables internas del sistema(estados). La controlabilidad es lapropiedad que indica si el comportamiento de un sistema puede ser controladopor medio de sus entradas, mientras que la observabilidad es la propiedad queindica si el comportamiento interno del sistema puede detectarse en sus salidas.
1.3.1 Controlabilidad
Consideremos el sistema de n estados y p entradas
�x = Ax+Bu (1.33)
con las matrices constantes A 2 Rn�n y B 2 Rn�p. Como la controlabili-dad relaciona las entradas y los estados del sistema, la ecuación de salida esirrelevante.11La falta de mediciones o carencia de medios para obtenerlas constituye el problema referido
como incompleteness of measurements.
21

De�nición 1 La ecuación de estados 1.33, o el par (A;B), se dice controlablesi para cualquier estado inicial x (0) = x0 2 Rn y cualquier estado �nal x1 2 Rn,existe una entrada que trans�ere el estado x de x0 a x1 en tiempo �nito. Encaso contrario, la ecuación 1.33, o el par (A;B), se dice no controlable.
La controlabilidad tiene que ver con la posibilidad de llevar al sistema decualquier estado inicial a cualquier estado �nal en tiempo �nito, no importandoqué trayectoria se siga, o qué entrada se use.
Teorema 9 (Test de controlabilidad) Las siguientes a�rmaciones son equiv-alentes:
1. El para (A;B) ; A 2 Rn�n; B 2 Rn�p; es controlable.
2. La matriz de controlabilidad,
C =�B AB A2B : : : An�1B
�; C 2 Rn�np; (1.34)
es de rango n (rango �la pleno).
3. La matriz n� n
Wc (t) =
Z t
0
eA�BBT eAT �d� =
Z t
0
eA(t��)BBT eAT (t��)d� (1.35)
no es singular para todo t > 0:
Proof.
(1) 2) Consideremos dos vectores cualesquiera x0 y x1 2 Rn y un intervalo�nito de tiempo t1 cualquiera. Como el sistema es controlable, sabemosque existe alguna entrada u (t) que trans�ere el estado de x(0) = x0 alestado �nal x(t1) = x1 en el tiempo t1: Usando la fórmula de variación delos parámetros, tenemos entonces que se satisface la ecuación
x1 = x (t1) = eAt1x0+
Z t1
0
eA(t1��)Bu (�) d� ; (1.36)
()Z t1
0
eAT (t1��)Bu (�) d� = x1 � eAt1x0
Llamaremos z al vector z , x1 � eAt1x0:Recordemos la propiedad que menciona que toda función matricial de unamatriz n � n se puede expresar como un polinomio matricial de ordenn � 1; entonces podemos escribir eA(t1��) como un polinomio en A (concoe�cientes dependientes de � ),
eA(t1��) = eAt1e�A�
=n�1Xk=0
�k (�)Ak
= �0 (�) I + �1 (�)A+ : : :+ �n�1 (�)An�1 (1.37)
22

Reemplazando 1.37 en 1.38 obtenemos
z =
Z t1
0
eA(t1��)Bu (�) d�
=
Z t1
0
��0 (�) I + �1 (�)A+ : : :+ �n�1 (�)A
n�1�Bu (�) d�=
Z t1
0
�B�0 (�)u (�) +ABu (�) �1 (�) + : : :+A
n�1B�n�1 (�)u (�)�d�
=
Z t1
0
�B AB A2B : : : An�1B
� 2664�0 (�)u (�)�1 (�)u (�)
: : :�n�1 (�)u (�)
3775 d�
=�B AB A2B : : : An�1B
� 2664R t10�0 (�)u (�)R t1
0�1 (�)u (�): : :R t1
0�n�1 (�)u (�)
3775 = Cr (1.38)donde hemos de�nido como r el vector de la derecha en la línea anteriora 1.38, y C es la matriz de controlabilidad de 1.34. Así, en otras palabras,la controlabilidad del par (A;B) implica que la ecuación lineal algebraicaz = Cr siempre tiene solución, para z y r en Rn arbitrarios. Se sigueentonces que esto sucede si y sólo si la matriz C es de rango �la pleno, esdecir, n:
(2) 3) Mostramos esta implicación por contradicción. Supongamos que lamatriz C tiene rango �la pleno pero que existe algún t > 0 tal que Wc (t)es singular. Por la forma del integrando en 1.35, la matrizWc (t) es siempresemide�nida positiva, y que sea singular es equivalente a decir que existealgún vector no nulo v 2 Rn tal que vTWc (t) v = 0, es decir,
0 = vTWc (t) v
=
Z t
0
vT eA�BBT eAT �vd� =
Z t
0
vT eA�B 2 d�que es equivalente a decir que vT eA�B = 0 para todo � 2 [0; t] : Escribi-endo la exponencial eAt en forma polinomial, similar a 1.37, tenemos
0 = vT eA�B = vT�B AB : : : An�1B
� 2664�0 (�) Ip�1 (�) Ip: : :
�n�1 (�) Ip
3775 (1.39)
Como eA�B 6= 0 si B 6= 0; la única posibilidad de que se dé 1.39 para todo� es que vTC = 0, que implicaría que el rango �la de C es menor que n; locual es una contradicción, y prueba que 2) 3:
23

(3) 1) Sean x0 y x1 dos vectores cualesquiera de Rn, y t1 > 0 arbitrario. SiWc (t) es no singular para cualquier t > 0; entonces podemos construirnosla entrada
u (t) = �BT eAT (t1�t)W�1
c (t1)�eAt1x0 � x1
�(1.40)
Veamos que esta entrada trans�ere el estado del sistema de x0 a x1 enel tiempo t1. Efectivamente, reemplazando u (t) de 1.40 en la fórmula devariación de los parámetros para x (t1) tenemos
x (t1) = eAt1x0 ��Z t1
0
eA(t1��)BBT eAT (t��)d�
�W�1c (t1)
�eAt1x0 � x1
�= eAt1x0 �Wc (t1)W
�1c (t1)
�eAt1x0 � x1
�= x1
Como x0; x1; y t1 > 0 son arbitrarios, hemos mostrado que el sistema escontrolable.
1.3.2 Observabilidad
El concepto de observabilidad es dual al de controlabilidad, e investiga la posi-bilidad de estimar el estado del sistema a partir del conocimiento de la salida.Consideramos el sistema lineal estacionario
�x = Ax+Bu (1.41)
y = Cx+Du
donde A 2 Rn�n; B 2 Rn�p; C 2 Rq�n; D 2 Rq�p:
De�nición 2 La ecuación de estado 1.41 es observable si para cualquier estadoinicial x (0) (desconocido), existe un tiempo �nito t1 tal que el conocimiento dela entrada u y la salida y sobre el intervalo [0; t1] es su�ciente para determinar enforma única el estado inicial x (0). En caso contrario el sistema no observable.
Dado un estado inicial x (0) y una entrada u (t), la salida del sistema estádada por la fórmula
y (t) = CeAtx (0) + C
Z t
0
eA(t��)Bu (�) d� +Du (t) (1.42)
Para estudiar observabilidad, la salida del sistema y (t) y la entrada u (t) sesuponen conocidas, siendo el estado inicial x (0) la única incógnita. Así, de 1.42podemos escribir
CeAtx (0) = y (t)
, y (t)� CZ t
0
eA(t��)Bu (�) d� +Du (t) (1.43)
24

donde y (t) es una función conocida.De lo anterior surge la pregunta, ¿cómo resolver 1.43 para obtener x (0) de
y (t)? Para un tiempo t �jo, CeAt es una matriz q � n real y constante, e y (t)un vector q � 1 constante. Por su de�nición, y (t) está siempre en la imagen deCeAt, por lo que siempre existe una solución x (0) : La cuestión es si existe unasolución única.En general, dado que hay menos variables medibles que el número de estados
del sistema, tenemos que q < n. En este caso la matriz CeAt tiene rango a losumo q, y por lo tanto tiene un espacio nulo no trivial. En consecuencia, siq < n la solución no es única, y no podemos hallar un único valor x (0) de 1.43para un t �jo dado.Para poder determinar x(0) en forma única de 1.43 es necesario utilizar el
conocimiento de y(t) y u(t) sobre un intervalo de tiempo de longitud no nula,como se muestra en el siguiente teorema.
Teorema 10 (Test W0 de observabilidad) La ecuación de estados 1.41 esobservable si y sólo si la matriz W0 (t) 2 Rn�n
W0 (t) =
Z t
0
eAT �CTCeA�d� (1.44)
es no singular para todo t > 0:
Proof. Multiplicamos por izquierda ambos lados de 1.43 por eAT tCT y luego
integramos sobre [0; t1], lo que da�Z t1
0
eAT tCTCeAtdt
�x (0) =
Z t1
0
eAT tCT y (t) dt
Si W0 (t1) es no singular, entonces
x (0) =W�10 (t1)
Z t1
0
eAT tCT y (t) dt (1.45)
que da una única solución x (0) : Así hemos mostrado que siW0 (t) es no singularentonces el sistema es observable.Para mostrar la reversa supongamos que W0 (t1) es singular. Por su de�nición,W0 (t1) es semi-de�nida positiva, o sea que existe un vector constante v 2 Rn�1tal que
vTW0 (t1) v =
Z t1
0
vT eAT tCTCeAtvdt
=
Z t1
0
CeAtv 2 dt = 0Pero, por la propiedad de la norma, esto implica que
CeAtv � 0 (1.46)
25

para todo t 2 [0; t1] :Si u(t) � 0 entonces, en particular, las condiciones iniciales x (0) = v 6= 0 yx (0) = 0 dan ambas la misma salida y (t) = CeAtx (0) � 0 y por lo tantono pueden diferenciarse. Esto muestra que si W0 (t) es singular el sistema esinobservable, completando la prueba del teorema.De la de�nición de la matrizW0 (t) vemos que la observabilidad sólo depende
de las matrices A y C. Así, la observabilidad es una propiedad del par (A;C),e independiente de las matrices B y D.
Teorema 11 (Dualidad entre controlabilidad y observabilidad) El par (A;C)es observable si y sólo si el par
�AT ; CT
�es controlable12 .
El teorema de dualidad hace inmediata la demostración de los tests de ob-servabilidad análogos a los tests de contrabilidad.
Teorema 12 (Test de observabilidad) Las siguientes a�rmaciones son equiv-alentes:
1. El para (A;C) ; A 2 Rn�n; C 2 Rq�n; es observable.
2. La matriz de observabilidad,
O =
266664CCACA2
: : :CAn�1
377775 ; O 2 Rnq�n; (1.47)
es de rango n (rango columna pleno).
3. La matriz n� n
W0 (t) =
Z t
0
eAT �CTCeA�d� =
Z t
0
eAT (t��)CTCeA(t��)d� (1.48)
es no singular para todo t > 0:
Observación a través de diferenciación
Una forma alternativa de resolver 1.43 es a través de la diferenciación repetida dey (t) en t = 0 (que equivale a la diferenciación repetida de la entrada y salida). Es
fácil veri�car que y (0) = Cx (0) ;�y (0) = CAx (0) ; :::; y(n�1) (0) = CAn�1x (0),
por lo que podemos escribir:2664CCA: : :
CAn�1
3775x (0) =2664
y (0)�y (0): : :
y(n�1) (0)
3775 (1.49)
12La demostración de ese teorema es inmediata al considerar las de�niciones de Wc (t) yW0 (t) :
26

es decir, Ox (0) = ey (0) :Por contrucción, ey (0) está en la imagen de O; y si el sistema es observable,
el rango columna de O es pleno, rango O = n: Entonces, existe una soluciónúnica del sistema de ecuaciones 1.49 dada por
x (0) =�OTO
��1OT ey (0) (1.50)
Notar que aún seguimos necesitando conocimiento de y (t) en un entorno
de t = 0 para poder determinar�y (0) ; :::; y(n�1) (0) :Si bien es factible imple-
mentar observación mediante este método de diferenciación, en la práctica noes recomendable, ya que la medición de y (t) va a incluir casi siempre ruido dealta frecuencia. La diferenciación de y (t) �ampli�ca�el ruido, aumentando loserrores en el cálculo de x (0). Por otro lado, como la integración tiene el efectode ��ltrar�ruido de alta frecuencia, es mucho mejor implementar el cálculo dex (0) a través de la fórmula 1.45.
Gramiano de observabilidad
Si la matriz A es Hurwitz, la integralW0 (t) de 1.44 converge para t =1. En esecaso notamos simplemente W0 (t) =W0, y se llama gramiano de observabilidad.Si el par (A;C) es observable, entonces la matriz de observabilidad
O =
2664CCA: : :
CAn�1
3775es de rango n: Dada esta condición, si la matriz A es de Hurwitz, grantiza queW0 es la única solución, y positiva de�nida, de la ecuación
W0A+ATW0 = �CTC (1.51)
27

Capítulo 2
Espacio de estados ysistemas dinámicos
La teoría del espacio de estados involucra los modelos dinámicos que describenla dinámica interna de un proceso físico y la interación de los procesos con elexterior. Por lo tanto dar una visión general de un sistema dinámico es nuestropunto de partida.
2.1 Sistema dinámico
Es importante enfatizar que un sistema dinámico es un modelo matemáticoy por lo lanto debe ser diferenciado de un proceso físico para el cual éste esuna descripción general, no siempre exacta. Sistemas dinámicos de diferentetipo pueden ser usados como modelos del mismo proceso físico, no obstante, esconveniente usar la palabra "sistema" para el proceso físico real descrito por elmodelo dinámico y en este caso agregar "real" o "físico" ayudará para establecertal distinción.En lo que sigue se dará un concepto matemático general de un sistema
dinámico en el espacio de estados. Este concepto se ha desarrollado de distintasteorías como la teoría clásica de distemas dinamicos diferenciables, teoría decircuitos y teoría de autómatas.
2.1.1 Concepto general de sistema dinámico
Antes de dar una de�nción formal es necesario considerar los términos básicosy las relaciones existentes entre ellos para obtener la de�ción de un sistemadinámico.El dominio del tiempo. Un sistema dinámco evoluciona en el tiempo con
lo que las variables que describen el comportamiento del sistema son funcionesdel tiempo. Con cada sistema dinámico hay un domino del tiempo T � R elcual contiene todos los tiempos t en los que las variables del sistema pueden ser
28

evaluados. El domino del tiempo puede ser continuo es decir un intervalo dondeT = (0;1] o discreto, es decir, T consisten de punto aislados en R como T = Zo T = N. El intermalo (t0; t1]lo usaremos para denotar el conjunto de valoresft 2 T ; t0 � t < t1g en T:Variables externas. Estas son variables que describen las interacciones del
sistema con el mundo exterior. Dado que una descripción completa de todas lasinteracciones nunca es posible, el modelo debe incluir un conjunto de variablesque representen de la mejor manera al problema bajo análisis. Es usual dividirla variables externas en la familia u = (ui) de las entradas y la familia y = (yi)de las salidas Por entradas debe entenderse a las variables que modelan lain�uencia del munto exterior sobre el sistema físico.Estas entradas pueden sercontroladas o bien sin contol(disturbios). Por salida se hace referencia a lasvariables con las cuales el sistema actúa sobre el mundo exterior. Algunas veceslas salidas se dividen en dos conjuntos(no necesariamente disjuntos) de variables.Aquellas salidas que pueden ser medibles las llamaremos medibles y aquellasque deben ser manipuladas para mantener ciertos requerimientos especí�cos lasnombraremos reguladas.En un sistema dinámico se debe especi�car el conjunto U de los valores de
entrada(alfabeto de entrada)1 y el conjunto Y de valores de salida(alfabeto desalida), por ejemplo U = R; Y = R2 o bien U = [0;1) ; Y = [0;1).El conjunto UT denota el conjunto de todas las funciones u (�) : T ! U
en general no es posible admitir cualquier funcion arbitraria u (�) 2 UT comoseñales de entrada. Además del conjunto de valores de entrada se debe especi-�car el conjunto U � UT de funciones de entradas admisibles. Una apropiadaelección de U permite imponer las propiedades de medibilidad y suavidad a lasfunciones de control, así como las restricciones de variación respecto al tiempoen los valores de control.Estado interno. La noción de estado desempeña un papel fundamental en
la de�nición de un sistema dinámico. A diferencia de las variables externas, lasvariables internas o variables de estado describen los procesos en el interior delsistema. No cualquier conjunto de variables internas de un sistema puede seraceptado como un vector de estados. Existen tres condiciones que se requieren:
I) El estado presente y la función de control elegida determinan los esta-dos futuros del sistema. Especí�camente, dado el estado x (t0) = x0 delsistema para algún tiempo t0 2 T y el control u (�) 2 U , la evolucióndel estado del sistema x (t) está unicamente determinado para todos lost en un intervalo de tiempo apropiado Tt0;x0;u(�) de T comenzando en t0.Tt0;x0;u(�) puede ser considerado como la "expansión o tiempo de vida" dela trayectoria2 x (�) comenzando en x0 para el tiempo t0 bajo el controlu (�).
II) Dado x (t0) = x0 para algún tiempo t0 2 T , el estado x (t) en cualquiertiempo posterior t 2 T; t � t0, depende únicamente de las valores de
1Es importante destacar que el conjunto U de valores de entradas admisibles no cambiacon el tiempo y no depende de los valores de otro sistema de variables.
2"Live span", véase [15]
29

entrada u (s) para s 2 [t0; t) : Así, para un tiempo t, el estado presentex (t) no estaá in�uenciado por los valores presente y futuro u (s) ; s � tde la entrada de control. Más aún, el conocimiento del estado x (t0) paraalgún tiempo t0 < t sustituye la información acerca de todos los valoresde las entradas y estados previos.
III) El valor de la salida en el tiempo t está completamente determinado por losvalores de la entrada y del estado u (t) y x (t) simultáneamente. En otraspalabras, las entradas pasadas actuan sobre la salida presente únicamentevía los efectos acumulados sobre el estado presente del sistema.
Estos requerimientos aseguran que el principio de causalidad está construidobajo el concepto de estado. Si se observa la salida y (t) como los "efectos" delpasado y el presente como las "causas"(=entradas), entonces u (t) representalas causas instantáneas y el estado x (t) incorpora la totalidad de las causaspasadas.La elección de un adecuado vector de estado es usualmente un problema
mucho más difícil que el de especi�car las variables externas, para lo cual nohay nada preestablecido. De cualquier modo, en sistemas físicos las vaiables deestado son frecuentemente asociadas con el almacenamiento de energía3 .Las variables de estado no necesitan representar cantidades físicas del sis-
tema. Desde el punto de vista del procesamiento de información el estado delsistema puede ser visto como un tipo de actualización de memoria o almacén deinformación. El conjunto X de posibles estados aceptables de el sistema puedeser sustituido por cualquier otro conjunto eX el cual es una correspondencia unoa uno con X y por tanto puede llevar la misma cantidad de información; así,hay una mayor libertad para la de�nición de variable de estado que para lade�nición de las variables externas que se re�eren a la medición de cantidadesfísicas. Las arbitrariedades pueden reducirse solicitanto que el estado del sis-tema represente la mínima cantidad de información necesaria para describir elefecto de la historia pasada sobre el desarrollo futuro del sistema.Las condiciones (I), (II) y (III) conducen la introducción de dos mapeos los
cuales deben se especi�cados en la de�nición de cada sistema dinámico.Mapeo de transición de estados. De acuerdo con (I) y (II), la evolución
del estado de un sistema(trayectoria) puede ser descrita por un mapeo ' llamadomapeo de transición de estado como sigue:
x (t) = '�t; t0; x
0; u (�)�; t 2 Tt0;x0;u(�): (2.1)
'�t; t0; x
0; u (�)�únicamente dependen de la restricción u (�)j [t0; t) debido a
(II). En la mayoría de las aplicaciones este mapeo está implícitamente de�nidopor las ecuaciones de movimiento del sistema. Si estas ecuaciones son diferen-ciales o en diferencias para x (�), un problema de valor inicial con x (t0) = x0
3Por ejemplo, en los sistemas mecánicos la posición y la velocidad de cada masa o cuerporígido son posibles variables internas las cuales, conjuntamente, representan el estado delsistema en un tiempo dado.
30

debe ser resuelto para una función de control dada u (�) para obtener x (t) ='�t; t0; x
0; u (�)�; t 2 Tt0;x0;u(�).
Mapeo de transición de salida. Por el requerimiento (III) la salida delsistema para el tiempo t está totalmente determinada por el valor del estado yla salida en el tiempo t,
y (t) = � (t; x (t) ; u (t)) (2.2)
� es llamado el mapeo de salida.Ecuaciones diferenciales pueden ser resueltas hacia adelante y hacia atrás en
el tiempo. Por tanto, si el mapeo de transición de estados está de�nido por unaecuación diferencial, el estado presente x (t0) = x0 tiene una expansión de vidaTt0;x0;u(�) que abarca momentos pasados y futuros, y el estado de la trayectoriax (t) = '
�t; t0; x
0; u (�)�está de�nido por t < t0 también. La siguiente de�nición
permite esta posibilidad.
De�nición 3 Sistema dinámico. La estructuraP= (T;U;U ; X; Y; '; �) se
dice que es un sistema dinámico o sistema de espacio de estados con dominio enel tiempo T , espacio de valores de entrada U , espacio de funciones de entradaU , espacio de estados X, espacio de valores de salida Y , mapeo de transiciónestados ' y mapeo de salida �, si T;U;U ; X; Y son conjuntos no vacíos, T � R;U � UT ; y � : T � X � U ! Y; ' : D' ! X (donde D' � T 2 � X � U) sonfunciones tales que los siguientes axiomas se cumplenAxioma del intervalo: Para cada t0 2 T; x0 2 X; u (�) 2 U la expansión
de vida de '��; t0; x0; u (�)
�Tt0;x0;u(�) =
�t 2 T ;
�t; t0; x
0; u (�)�2 D'
(2.3)
es un intervalo en T que contiene a t0:Axioma de consistencia: Para cada t0 2 T; x0 2 X; u (�) 2 U
'�t0; t0; x
0; u (�)�= x0 (2.4)
Axioma de causalidad: Para todo t0 2 T; x0 2 X; u (�) ; v (�) 2 U ;t1 2 Tt0;x0;u(�) \ Tt0;x0;v(�)
(8t 2 [t0; t1) : u (t) = v (t)) =) '�t1; t0; x
0; u (�)�= '
�t1; t0; x
0; v (�)�
(2.5)
Propiedad de cociclo: Si t1 2 Tt0;x0;u(�) y x1 = '
�t1; t0; x
0; u (�)�para
algún t0 2 T; x0 2 X; u (�) 2 U entonces Tt1;x1;u(�) � Tt0;x0;u(�) y
'�t; t0; x
0; u (�)�= '
�t; t1; x
1; u (�)�; t 2 Tt1;x1;u(�): (2.6)
El espacio T � X es algunas veces llamado espacio de eventos deP: Dí-
gase que el control u (�) 2 U trans�ere un evento�t0; x
0�a�t1; x
1�4si x1 =
'�t1; t0; x
0; u (�)�. Aunque esta expresión intuitivamente sólo tiene sentido si
t1 � t0 es conveniente usarla también si t1 < t0. La propiedad del cociclo
4notación:�t0; x0
� u(�) �t1; x1
�31

menciona que un control u (�) transifere el evento�t0; x
0�al evento
�t1; x
1�y�
t1; x1�a�t2; x
2�para tener entonces que
�t0; x
0�se trans�ere a
�t2; x
2�. Si no
se asume lo anterior sería imposible interpretar '�t; t0; x
0; u (�)�como el estado
dePpara el tiempo t cuando
Pes inicializado en
�t0; x
0�y controlado por
u (�). El axioma de consistencia implica entonces el argumento x0 de ' es enefecto el estado inicial x (t0) de el sistema.El axioma del intervalo, el axioma de consistencia y el axioma de causalidad
garantizan que el estado del sistema satisface los requerimientos (I) y (II). El re-querimiento (III) es automáticamente satisfecho si se interpreta y (t) = � (t; x; u)como la salida de
Pen el tiempo t cuando x es su estado y u es el valor de la
entrada instantánea en el tiempo t.Para cualquier t0 2 T , x0 2 X, u (�) 2 U la función
t 7! x (t) = '�t; t0; x
0; u (�)�; t 2 Tt0;x0;u(�):
describe la evolución del estado del sistema y es llamada la trayectoria deP
determinada por la condición inicial x (t0) = x0 y la función de control u (�).Su dominio de de�nición Tt0;x0;u(�) es la expansión de vida de la trayectoria. Suimagen
�'�t; t0; x
0; u (�)�; t 2 Tt0;x0;u(�)
se dice que es una órbita de
P. La
correspondiente trayectoria de salida o señal de salida es
y (�) = y��; t0; x0; u (�)
�: t 7! y (t) = � (t; x (t) ; u (t)) ; t 2 Tt0;x0;u(�):
(2.7)La de�nición anterior hace posible de que la trayectoria de estados de un sistemaque comienza en x (t0) = x0 bajo el control u (�) 2 U no exista para todos losinstantes futuros t � t0. Esto puede re�ejar una situación donde el sistema "es-talle" o la trayectoria "abandone el espacio de estados" X bajo la in�uencia delcontrol u (�). Como caso extremo, la de�nición (3) permite que '
�t; t0; x
0; u (�)�
no esté de�nido para cualquier t > t0 y esto será expresado diciendo que elcontrol u (�) no es aplicable a
Pinicializada en
�t0; x
0�.
De�nición 4 Sistema dinámico completo. Se dice que un sistema dinámicoPes completo si para todo
�t0; x
0; u (�)�2 T �X � U ,
Tt0;x0;u(�) � Tt0 := ft 2 T ; t � t0g :Pes completo si y sólo si D' � T 2��X�U , donde T 2� =
�(t; t0) 2 T 2; t � t0
:
Suponiendo que es completoPy que el sistema es inicializado en
�t0; x
0�,
esto es el estado inicial x (t0) = x0 está �jado. Entonces la señal de salida estáde�nida sobre t0 y la restricción y (�)jTt0 de y (�) = y
��; t0; x0; u (�)
�depende
únicamente de la restricción
v (�) = u (�)jTt0 2 U0 := fu (�)jTt0 ;u (�) 2 Ug
por el axioma de cuasalidad. Abusando de la notación, en lo que sigue se es-cribirá y
��; t0; x0; u (�)jTt0
�en lugar de y
��; t0; x0; u (�)
���Tt0 . El comportamientoentrada salida de
Pse describe entonces como sigue:
32

De�nición 5 Comportamiento entrada-salida. Dado un sistema completoPy�t0; x
0�2 T � X el operador entrada salida inicializado en
�t0; x
0�está
de�nido por
Gt0;x0:Ut0 ! Y Tt0 ; v (�)! y��; t0; x0; v (�)
�Un sistema dinámico completo es llamado reversible si es también un sistema
dinámico para el tiempo corriendo hacia atrás.
De�nición 6 Sistema reversible. Un sistema dinámico completoPes re-
versible siD' = T 2 �X � U
esto es Tt0;x0;u(�) = T para todo�t0; x
0; u (�)�2 T �X � U :
En consecuencia todas las trayectorias de un sistema reversible están de�nidassobre el dominio completo del tiempo T . Dado cualquier evento
�t1; x
1�y
cualquier t0 2 T; t0 < t1; u (�) 2 U ; existe un único x0 2 X tal que u (�) trans�era�t0; x
0�a�t0; x
1�. En efecto, este estado está dado por x0 = '
�t0; t1; x
1; u (�)�:
Este es el único estado con esta propiedad, dado que para otro bx 2 X que satis-
face�t0; bx0� u(�) �
t1; x1�por la propiedad de cociclo.y
�t1; bx1� u(�) �
t0; x0�con lo
que�t0; bx0� u(�) �
t0; x0�, en consecuencia bx0 = x0 por el axioma de consistencia.
La de�nición de sistema dinámico está lejos de ser una de�nición generalsobre la cual construir una sustancial teoría matemática, no osbtante es útilpara:
� Mostrar la unidad de desarollas similares en diferentes campos,
� Establecer puentes de transferencia de ideas de un área de aplicaciones aotra,
� Para reconocer más claramente las estructuras adicionales de los objetosen un campo particular.
Tradicionalmente el concepto de sistema dinámico fue más o menos sinón-imo de sistemas descritos por ecuaciones diferenciales. La teoría clásica de lossistemas dinámicos fue motivada por problemas en mecánica, particularmentecorrespondientes a la mecánica de los cuerpos celestes. Debido a esto fue naturalsuponer que las fuerzas externas estaban dadas y que no eran sometidas a lamanipulación humana. Esto explica por qué los aspectos relativos a entradasy salidas no están presentes en la visión clásica de los sistemas dinámicos. Elsiguiente concepto puede ser visto como un equivalente mecánico de uns sistemadinámico reversible.
De�nición 7 Flujo diferenciable. Una tripleta (T;X; ) es llamada un �ujodiferenciable o un sistema dinámico en el sentido clásico si T � R es un in-tervalo abierto, X un conjunto abierto de |n, | = R o C(más generalmente un
33

�ujo diferenciable) y es un mapeo continuamente diferenciable de T 2 �X enX, tal que
(t; t; x) = x; t 2 T; x 2 X (t; t1; ' (t1; t0; x)) = ' (t; t0; x) ; t0; t1 2 T; x 2 X
Flujos diferenciales locales evitan la suposición de completez introduciendola consideración que del tiempo y estado inicilaes dependen los tiempos de vidaTt0;x0 de las trayectorias
��; t0; x0
�: Los �ujos diferenciales locales son genera-
dos comunmente por medio de la solución de ecuaciones diferenciales. Considere
�x (t) = g (t; x (t)) (2.8)
donde g : T�T 7! |n es continua, con T un intervalo abierto yX un subconjuntoabierto de |n. Se dice que x (�) es una solución de la ecuación diferencial 2.8sobre un intervalo abierto I � T si x (�) es continuamente diferenciable sobreI; (t; x (t)) 2 T �X para todo t 2 I y x (�) satisface la ecuación diferencial 2.8sobre I:
Teorema 13 Sea T 2 R un intervalo abierto, X un subconjunto abierto de |ny suponga que g : T � X ! |n es continua y continuamente diferenciable conrespecto a x sobre T � X. Entonces para cualquier (t0; x0) 2 T � X, existeuna solución única x (�) = ' (�; t0; x0) de la ecuación 2.8 sobre algún intervaloabierto máximo Tt0;x0 � T conteniendo a t0 tal que x (t0) = x0. Además elconjunto
D' =�(t; t0; x0) ; t 2 Tt0;x0 ; (t0; x0) 2 T �X
es un conjunto abierto en T 2�X y ' : D' ! |n es continuamente diferenciable('se dice que es la solución general de la ecuación diferencial 2.8).
Se observa que bajo las condiciones del teorema precedente, la ecuacióndiferencial 2.8 general un �ujo diferencial local, (T;X; ') :Comparando la de�nición de sistema dinámico con la correspondiente al �ujo
diferenciable se pueden observar las siguientes diferencias:
� Sólo se describe la evolución del estado,
� La condición de suavidad es impuesta sobre el mapeo de transición deestado,
� La reversibilidad está construida sobre la de�nición de �ujo diferencial.
2.2 Sistemas dinámicos diferenciables
En lo que sigue supondremos que cada espacio |l; l 2 N es un espacio normado,con una norma arbitraria denotada por k�kUn sistema dinámico
P= (T;U;U ; X; Y; '; �) es llamado diferenciable si
satisface las siguientes condiciones:
34

1. T � R es un intervalo abierto.
2. U; Y son subconjuntos de |m y |p respectivamente, X es un subconjuntoabierto de |n:
3. Existe una función f : T �X �U ! |n tal que para todo t0 2 T: x0 2 X;u (�) 2 U el problema de valor inicial
�x (t) = f (t; x (t) ; u (t)) ; t � t0; t 2 T
x (t0) = x0(2.9)
tiene una solución única�x (t) sobre un intervalo de tiempo abierto máximo
I que satisface I = Tt0;x0;u(�) y x (t) = '�t; t0; x
0; u (t)�; t 2 I
4. � = T �X � U ! Y es continua
Nota 1 Un sistema en tiempo continuoP= (T;U;U ; X; Y; '; �) cuyo intervalo
de tiempo T � R no es abierto será llamado diferenciable si es obtenido porrestricción del dominio del tiempo desde un sistema diferenciable en el sentidode la de�nición anterior.
Algunos comentarios sobre la elección de U y el concepto de solución parala ecuación 2.9 se dan a continuaciónFrecuentemente es necesario considerar saltos en las entradas de control, por
ejemplo la función u (�) la cual u (t) = u1; t � t1 y otra u (t) = u2; t > t1.Lo anterior conduce a la elección de U como el espacio de las funciones con-stantes por pedazos de T a U o el espacio de las funciones continuas por pedazosPC (T ;U). Algunas veces será necesario extender el conjunto de las señales deentrada a funciones medibles en el sentido de Lebesgue u que son localmenteintegrables sobre T es decir
R baku (t)k dt < 1 para todo a; b 2 T a < b. En
general f (t; x; u (t)) no será dependiente de manera continua de t para cada x�jo, en consecuencia el concepto de solución utilizado en el teorema anterior noes aplicable. En lugar de esto se denominará x (�) : I ! X una solución de 2.9sobre un intervalo I � T si es absolutamente continua y satisface el problemade valor inicial precedente"casi donde sea" sobre I (es decir, "excepto sobre unconjunto de Lebsegue de medida cero"). Por absolutamente continua se quieredecir que la señal x (�) es continua, diferenciable casi donde sea con derivadalocalmente integrable y puede ser reconstruida desde su derivada por medio dela integración R t
t0
�x (s) ds = x (t)� x (t0) ; t0; t 2 T; t � t0
Dos resultados básicos sobre la existencia y unicidad de soluciones de ecua-ciones diferenciales con lado derecho medible se dan a continuación.Sea
�x (t) = g (t; x (t)) (2.10)
donde g : T �X ! |n; T � R y X un subconjunto abierto de |n. Se dice queg : T �X ! |n satisface las condiciones de Carathéodory si
35

� (Car 1) g (�; x) : T ! |n es medible para cada x 2 X �ja;
� (Car 2) g (�; x) : T ! |n es continua para cualquier x 2 X �ja;
� (Car 3) kg (�; ex)k es localmente integrable sobre T para algún ex 2 X;� (Car 4) Para cada conjunto compacto C = I � | � T � X existe unafunción integrable LC (�) : I ! R+ tal que
kg (t; x)� g (t; y)k � LC (t) kx� yk ; (t; x) ; (t; y) 2 C (2.11)
Recuérdese que en un espacio métrico la distancia entre un punto y unsubconjunto está de�nida como
dist (x; S) = inf fd (x; y) ; y 2 Sg (2.12)
Teorema 14 Carathéodory. Si T es un intervalo abierto, X es un subcon-junto abierto de |n y g : T �X ! |n satisface las condiciones de Carathéodorysobre T �X, entonces para cualquier
�t0; x
0�2 T �X existe una solución única
x (�) = '��; t0; x0
�de
�x (t) = g (t;x (t)) sobre algún intervalo abierto Tt0;x0 � T
conteniendo a t0, tal que x (t0) = x0. Además:
i) Si t+�t0; x
0�= supTt0;x0 < supT entonces x (t) no está acotado conforme
t% t+�t0; x
0�o el acotamiento @X de X es no vacía y dist (x (t) ; @X)!
0 conforme t % t+�t0; x
0�. De manera análoga, para t & t�
�t0; x
0�=
inf Tt0;x0 si t��t0; x
0�> inf T .
ii) Si D' es el dominio de de�nición de la solución general ';
D' =�(t; t0; x0) ; t 2 Tt0;x0 ; (t0; x0) 2 T �X
;
entonces D' es un conjunto abierto en T 2 � |n y D' ! |n es continua.
Si t+ = t+�t0; x
0�< supT como en (i), entonces t+ es llamado un tiempo
de escape �nito de la solución.' (�; t0; x0) Si adicionalmente ' (�; t0; x0) es noacotada sobre [t0; t+) se dice entonces que la solución "explota" en tiempo �nito.Para establecer que una ecuación diferencial de la forma 2.9 de�ne un sistema
dinámico diferenciable se debe veri�car que g (t; x) = f (t; x; u (t)) satisface lascondiciones de Carathéodory para toda u (�) 2 U .
Corolario 2 Sean T;U;U ; X; Y conjuntos que satisfacien lo correspondiente ala de�nición de sistemas dinámicos, y además � : T �X � U ! Y es continuay f : T �X �U ! |n es medible en (t; u) 2 T �U para toda x 2 X y continuaen x 2 X para cada (t; u) 2 T � U �jo. Si U � UT consiste de funcionesLp localmente integrables (1 � p � 1) sobre T y para cada conjunto compactoC = I �K � T �X existen constantes mC ; lC tales que
kf (t; x; u)k � mC (kukp + 1) ; t 2 I; u 2 U para algún x 2 X;
36

kf (t; x; u)� f (t; y; u)k � lC (kukp + 1) kx� yk ; (t; x) ; (t; y) 2 C; u 2 U
Entonces el problemea de valor inicial
�x (t) = f (t; x (t) ; u (t)) ; t 2 Tx (t0) = x0
tiene una solución única x (�) = x��; t0; x0; u (�)
�sobre un intervalo de existencia
máximo Tt0;x0;u(�) para todo�t0; x
0; u (�)�2 T � S� U . Además, si se de�ne al
mapeo de transición de estado ' : D' ! X por medio de
'�t; t0; x
0; u (�)�= x
�t; t0; x
0; u (�)�;
D'��t; t0; x
0; u (�)�2 T 2 �X � U ; t 2 Tt0;x0;u(�)
;
entoncesPes un sistema dinámico diferenciable.
En general los sistemas diferenciables no son completos. Consideremos elsiguiente ejemplo en que se muestra que el intervalo de existencia maximalTt0;x0;u(�) en general dependerá de x
0 y u (�) 2 U .
Ejemplo 1 Considere el problema de valor inicial
�x (t) = x (t)
2+ u (t) ; x (0) = x0 (2.13)
donde t 2 T = R; x0 2 X = R. Para el control constante u (t) � 1; t � 0 setiene la solución:
x (t) = tan�t+ c
�x0��; t � 0; c
�x0�= arctanx0 2 (��=2; �=2)
que "explota" en los tiempos t��x0�= ��=2 � c
�x0�. En este caso el inter-
valo de existencia es���=2� c
�x0�;+�=2� c
�x0��: Para el control constante
u (t) � 0 es sencillo ver que x (t) = x0=�1� x0t
�es una solución de 2.13 sobre�
1=x0;1�si x0 < 0: Para x0 = 0 la solución es cero para todo t 2 R y para
x0 > 0 el intervalo de existencia es��1; 1=x0
�:
En lo que sigue se determinarán las condiciones bajo las cuales un sistemadinámico diferenciable con espacio de estado X = |n es completo.La existencia de soluciones en el intervalo inf T < t < supT puede ser
derivada del inciso (i) del teorema 15 (Carathéodory). De hecho, si X = |nentonces supTt0;x0 < supT (respectivamente inf T < supTt0;x0) puede ocurrirsólo cuando x (t) no esté acotada conforme t ! supTt0;x0 < supT (respectiva-mente t ! inf Tt0;x0). De esta manera se necesitan criterios para asegurar queuna solución dada no escape en tiempo �nito en algún tiempo T < t1 < supT .El lema de Gronwall es fundamental para estimar el crecimiento de soluciones
de ecuaciones diferenciales.
37

Lema 1 Desigualdad generalizada de Gronwall. Suponga que T es unintevalo, a 2 T; � (�) es una función no negativa localmente integrable sobre Ty � (�) ; � (�) son funciones no negativas continuas sobre T tales que
� (�) � � (t) +
����Z t
a
� (r) � (r) dr
���� ; t 2 TEntonces:
� (t) � � (t) +
����Z t
a
� (r)� (r) exp
�����Z t
r
� (s) ds
����� dr���� ; t 2 TProposición 1 Suponga T � R es un intervalo abierto, X � |n es abierto yg : T �X ! |n es acotada de manera a fín, esto es:
kg (t; x)k �M (t) kxk+m (t) ; (t; x) 2 T �X;
donde M (�) ; m (�) son funciones no negativas localmente integrables sobre T .Entonces toda solución de
�x (t) = g (t; x (t)) está acotada sobre todo intervalo
�nito (t1; t2) ; t1; t2 2 T; t1 < t2 sobre el cual está de�nida. Si además X = |n
entonces toda solución de�x (t) = g (t; x (t)) puede ser continuada sobre T .
Corolario 3 Bajo las condiciones del corolario 9 con X = |n, si para todosubintervalo compacto I � T existen constantes CI y cI tales que:
kf (t; x; u)k � CI (kukp + 1) kxk+ cI (kukp + 1) ; (t; x; u) 2 I �X � U
entonces el sistema diferenciableP
= (T;U;U ; X; Y; '; �) es completo y re-versible.
2.2.1 Estados de equilibrio
SeaPun sistema diferenciable y sea u (�) 2 U . La fución de entrada u (�) de�ne
para cada tiempo t 2 T un campo vectorial x 7�! f (t; x; u (t)) sobre X. Son departicular importancia aquellos estados x para los cuales los campos vectorialesx 7�! f (t; x; u (t)) desaparecen para todos los tiempos t 2 T :
f (t; x; u (t)) = 0 t 2 T:
Estos estados son puntos singulares para todos los campos vectoriales x 7�!(t; x; u (t)) ; t 2 T . Dichos puntos representan el equilibrio del sistema en elsentido que si el estado en un tiempo inicial arbitrario t0 2 T es x y
Pes
controlado por u (�) entonces permanecerá en este estado para todo t 2 Tt0 . Lasiguiente de�nción es válida para sistemas dinámicos arbitrarios.
De�nición 8 Estados de equilibrio SeaPun sistema dinámico y u (�) 2 U ,
entonces x 2 X es un estado de equilibrio dePbajo el control u (�) si
' (t; t0; x; u (�)) = x; t0; t 2 T; t � t0
38

2.3 Propiedades de los sistemas
Con respecto al dominio del tiempo, se distingue entre sistemas continuos en eltiempo donde T es un intervalo acotado o no y sistemas discretos en el tiempodonde T es un subconjunto discreto de R. Dominios en tiempo discreto sueleser T = Z; T = N o una correspondiente secuencia de tiempo equidistanteZ� = fk�; k 2 Zg ; N� = fk� ; k 2 Ng donde � > 0: Sistemas diferenciales condominio de tiempo discreto son sistemas descritos por ecuaciones en diferencias
Ejemplo 2 Sistemas recursivos. Sea U;X; Y conjuntos no vacíos, T = No Z y
f : T �X � U ! X � : T �X � U ! Y
son dos mapeos arbitrairos. Para cualquier u (�) 2 U = UT ; t0 2 T; x0 2 X ysea '
�t; t0; x
0; u (�)�; t 2 T; t � t0 la única solución de la ecuación recursiva (o
en diferencias)x (t+ 1) = f (t; x (t) ; u (t))
con valor inicial x (t0) = x0:EntoncesP= (T;U;U ; X; Y; '; �) es un sistema
dinámico discreto en el tiempo. Todo sistema discreto en el tiempo con dominiocomo los de�nidos anteriormente puede ser descrito de esta forma(con posiblesrestricciones para U) y en particualr, los autómatas pueden ser vistos como unparticular tipo de sistemas recusivos
Aunque el estado de un sistema dinámico evoluciona en el tiempo, el sis-tema por sí mismo puede ser invariante en el tiempo en el sentido que el mapeode transición de estados es invariante respecto a las variaciones de tiempo yel mapeo de salida no depende explícitamente del tiempo. Estos sistemas sonanalizados más fácilmente que los sistemas variantes en el tiempo y tal invariazaen el tiempo se asume con frecuencia aunque en realidad los sistemas dinámi-cos pueden cambiar lentamente por los efectos de crecimiento, envejecimiento,desgaste, etc. Si T 2 R; U es un conjunto no vacio y � 2 R, se denota por S� eloperador de cambio sobre UT de�nida por
(S�u) (t) =
�u (t� �) si t� � 2 T
0 en otro caso
�S� es llamada el cambio derecho o hacia adelante si � > 0 e izquierdo o haciaatrás si � < 0:
De�nición 9 Sistema invariante en el tiempo. Un sistema dinámicoP
se dice que es invariante en el tiempo si satisface los siguientes axiomas
i) T � R contiene al 0 y es cerrado bajo la suma, es decir T + T � T:
ii) U es invariante bajo la variación derecha, es decir S�U � U para todo� 2 T; � � 0:
39

iii) Para cada t0; t; � 2 T; t � t0; � � 0 y cada x0 2 X; u (�) 2 U
'�t+ � ; t0 + � ; x
0; S�u (�)�= '
�t; t0; x
0; u (�)�:
iv) El mapeo de salida � no depende del tiempo, es decir, � (t; x; u) = � (x; u) ;t 2 T:
De iii) se ve que si x (�) es la respuesta del estado para u (�) comenzando en�t0; x
0�, la respuesta del estado ex (�) para el control eu = S�u comenzando en�
t0 + � ; x0�está dada por ex (t) = (S�x) (t) ; t � t0 + � :
El mapeo de transición de estados de un sistema invariante en el tiempo estácompletamente determinado por su mapeo de transición para el tiempo inicial�jo t0 = 0
'�t;x0; u (�)
�= '
�t; 0; x0; u (�)
�;�t; x0; u (�)
�2 T �X � U .
Un sistema diferenciable o recursivo�x (t) = f (t; x (t) ; u (t) ; t 2 R+) x (t+ 1) = f (t; x (t) ; u (t)) ; t 2 N
y (t) = � (t; x (t) ; u (t)) y (t) = � (t; x (t) ; u (t))
es invariante en el tiempo si f y � no dependen explícitamente del tiempo.Algunas veces es matemáticamente conveniente convertir un sistema difer-
encial o en diferencias variante en el tiempo en uno invariante en el tiempointroduciendo el tiempo como una nueva variable de estado xn+1 (t) = t: Elsistema de ecuaciones se convierte en:
�x (t) = f (xn+1 (t) ; x (t) ; u (t)) x (t+ 1) = f (xn+1 (t) ; x (t) ; u (t))
�xn+1 (t) = 1 xn+1 (t) + 1
y (t) = � (xn+1 (t) ; x (t) ; u (t)) ; y (t) = � (xn+1 (t) ; x (t) ; u (t))
Este método incrementa la dimensión del espacio de estados en uno.Un sistema es llamado �nito, �nito dimensional o in�nito dimensional de-
pendiendo si su espaciode estados X es un conjunto o un vector de estados dedimensión �nita o in�nita
De�nición 10 Sistema lineal. Sea | un campo arbitrario . Un sistemadinámico
Pse dice ser |� lineal si
i) U;U ; X; Y son espacios vectoriales sobre |.
ii) los mapeos' (t; t0; �; �) : X � U !X� (t; �; �) : X � U!Y
son |� lineales para todo t; t0 2 T; t � t0:
La condición (ii) implica que
' (t; t0; 0X ; 0U ) = 0X ; t; t0 2 T; t � t0
donde 0X es el origen en X y 0U el origen en U(la función cero). Esto signi�caque 0X es un estado de equilibrio de
Pbajo el control 0U siempre que
Psea
lineal
40

2.3.1 Linealización
A continuación se mostrará la forma en que un sistema lineal puede ser usadopara aproximar el comportamiento de un sistema diferenciable no lineal cercade una trayectoria o punto de equilibrio dados.Sea
Pun sistema dinámico diferenciable con ecuación de estado
�x (t) = f (t; x (t) ; u (t)) ; t 2 T (2.14)
y la ecuación de saliday (t) = � (t; x (t) ; u (t)) (2.15)
donde t 2 R es un intervalo abierto, U 2 Rm y X � Rn son abiertos, Y = Rp;U = C (T;U). Sea ex (�) la trayectoria correspondiente a un control dado u (�) 2 Uy las condiciones iniciales
�t0; ex0� 2 T �X, entonces
�ex (t) = f (t; ex (t) ; eu (t)) ; t � t0; t 2 Tex (t0) = ex0Se asume que las funciones f : T � X � U ! Rn y � : T � X � U ! Y soncontinuas y contínuamente diferenciables respecto a (x; u) sobre T � X � U:Considerando las derivadas de Fréchet, mejor conocidas como Jacobianas
A (t) = Dxf (t; ex (t) ; eu (t)) = � @fi@xj
(t; ex (t) ; eu (t))�n�n
B (t) = Duf (t; ex (t) ; eu (t)) = � @fi@uk
(t; ex (t) ; eu (t))�n�m
C (t) = Dx� (t; ex (t) ; eu (t)) = � @�i@xj
(t; ex (t) ; eu (t))�p�n
D (t) = Du� (t; ex (t) ; eu (t)) = � @�i@uk
(t; ex (t) ; eu (t))�p�m
(2.16)
El sistema lineal diferenciable descrito por
�x (t) = A (t)x (t) +B (t)u (t)y (t) = C (t)x (t) +D (t)u (t)
(2.17)
se dice que es la linealización de las ecuaciones 2.14 y 2.15 a través de (ex (�) ; eu (�)) :Sea �0 2 Rn; u (�) 2 U y para todo � > 0 pequeño denotado por x (t; �) la
solución de la ecuación2.14 correspondiente al control u (t; �) = eu (t) + �u (t) yla condición inicial x (t0; �) = ex0 + ��0: Se sigue por los resultados básicos sobrela dependencia de soluciones con parámetros y condiciones iniciales que x (t; �)
es diferenciable respecto a � en � = 0 y la derivada � (t) =@x
@�(t; 0) satisface
�� (t) = A (t) � (t) +B (t)u (t) ; t 2 T; t � t0
Si � (�) es una solución de 2.17 correspondiente al control u (�) y estado inicial �0entonces, para pequeños � > 0; ex (t)+�� (t) es una aproximación de primer orden
41

de la solución de 2.14 correspondiente al control eu (t) + �u (t) y es estado incialex0 + ��0: Nótese que como �! 0 esta aproximación es, en general, únicamenteuniforme en t sobre un intervalo compacto.El comportamiento de el sistema lineal 2.17 cerca del origen proporciona
una aproximación del comportamiento del sistema no lineal 2.14, 2.15 en unavecindad su�cientemente pequeña de la trayectoria ex (t) :Como lo muestra la expresión 2.16 el modelo linealizado es, en general, vari-
ante en el tiempo "aún si el sistema no lineal es invariante en el tiempo" y estaes una de las principales razones de la importancia de los sistemas lineales vari-antes en el tiempo en la teorìa del control. No obstante, si se linealiza un sistemaque es invariante en el tiempo, para un punto de equilibrio correspondiente aciertas constantes de control el modelo linealizado será otra vez invariante en eltiempo.
2.4 Sistemas lineales
Asumir la linealidad de un sistema permite que cada estado y trayectoria desalida sean representados como una combinación lineal("superposición") de unconjunto �jo de trayectorias simples. El uso del principio de superposición parael análisis de sistemas lineales es el punto de partida. Se comienza considerandoun sistema lineal general y se muestra que cada trayectoria puede ser descom-puesta en un movimiento libre el cual depende únicamente del estado inical yun movimiento forzado que comienza en cero y depende sólo de la función decontrol. Se enfocará la atención en los sistemas lineales de dimensión �nitainvariantes en el tiempo descritos por ecuaciones diferenciales.
2.4.1 Sistemas lineales generales
Sea | un campo arbitrario yP= (T;U;U ; X; Y; '; �) un sistema | � lineal,
entonces para cada t0; t 2 T; t � t0 y �i 2 |; xi 2 X; ui 2 U; ui (�) 2 U ;i = 1; :::; k se tiene
'
�t; t0;
kPi=1
�ixi;kPi=1
�iui (�)�=
kPi=1
�i' (t; t0; xi; ui (�)) (2.18)
�
�t;
kPi=1
�ixi;kPi=1
�iui
�=
kPi=1
�i� (t; xi; ui) (2.19)
Estas ecuaciones expresan el principio de superposición para el estado y lasalida. Como un caso especial se obtiene el llamado principio de descomposición
'�t; t0; x
0; u (�)�= '
�t; t0; x
0; 0U�+ ' (t; t0; 0X ; u (�)) (2.20)
Esto muestra que cada trayectoria de un sistema lineal puede ser descompuestoen la suma de un movimiento libre t 7�! '
�t; t0; x
0; 0U�el cual depende sólo
del estado inicial x0 y un movimiento forzado t 7�! '�t; t0; x
0; 0X ; u (�)�el cual
42

depende únicamente del control u (�) : Otra vez, como caso especial de 2.18,tomando ui (�) = 0U , se obtiene por la ley de superposición del movimiento libre
'
�t; t0;
kPi=1
�ixi; 0U
�=
kPi=1
�i' (t; t0; xi; 0U ) (2.21)
y tomando xi = 0X , la ley de superposición de movimientos forzados
'
�t; t0; 0X ;
kPi=1
�iui (�)�=
kPi=1
�i' (t; t0; 0X ; ui (�)) (2.22)
Es sencillo ver que el principio general de superposición de las trayectorias deestados 2.18 es equivalente al principio de descomposición 2.20 junto con lasleyes de superposición 2.21 y 2.22.Las leyes de descomposición permiten introducir las siguientes dos familias
de mapeos lineales. Para cualquier par de tiempos (t; t0) 2 T 2� se de�ne eloperador de evolución � (t; t0) : X ! X como
� (t; t0)x = ' (t; t0; x; 0U ) ; x 2 X (2.23)
y el mapeo entrada-estado �(t; t0)u (�) : U ! X como
�(t; t0)u (�) = ' (t; t0; 0X ; u (�)) ; u (�) 2 U (2.24)
Los dos mapeos son lineales debido a 2.21 y 2.22. � (t; t0) asocia cualquierestado x con el estado x (t) en el tiempo t resultado del movimiento libre dePcomenzando en x (t0) = x: �(t; t0) mapea cualquier función de control u (�)
a un estado x (t) para el cualPes conducido en el tiempo t por u (�) desde el
estado inicial x (t0) = 0: Por 2.17 todas las trayectorias t 7�! '�t; t0; x
0; u (�)�
dePestán completamente determinadas por estas dos familias de operadores
lineales
'�t; t0; x
0; u (�)�= �(t; t0)x
0 +�(t; t0)u (�) ; (t; t0) 2 T 2�:
Para todos los sistemas lineales el mapeo lineal �(t; t0) puede ser expresado conla ayuda de los operadores � (t; s)(t;s)2T 2� : Por lo tanto, es de particular impor-
tancia estudiar la familia � (t; s)(t;s)2T 2� . Los axiomas del mapeo de transición
de estados implican las siguientes ecuaciones básicas
� (t; t) = IX ; t 2 T (2.25)
� (t2; t1) � � (t1; t0) = � (t2; t0) ; t0; t1;t2 2 T t0 � t1 � t2 (2.26)
Una familia (� (t; s))(t;s)2T 2� de operadores lineales sobreX con estas propiedades
es llamada una familia de operadores de evolución sobre X. SiPes invariante
en el tiempo es posible �jar t0 = 0 y obtener una familia de uno-paramétrica(� (t; s))t2T0 de operadores lineales � (t) : X ! X de�nidas por
� (t)x = �(t; 0)x = ' (t; 0; x; 0U ) ; t 2 T0 = ft 2 T ; t � 0g (2.27)
43

Las ecuaciones 2.25 y 2.26 implican entonces
� (0) = IX (2.28)
� (t) � � (s) = � (t+ s) ; s; t 2 T; t:x � 0: (2.29)
Una familia (� (t; s))t2T0de operadores lineales sobre X con esas propiedadesse llama semigrupo de operadores lineales sobre X. La teoría de semigrupos deoperadores sobre un espacios normados proveen las bases matemáticas para elestudio de sistemas lineales invariantes en el tiempo de dimensión in�nita.El siguiente ejemplo de dimensión �nita asocia las nociones abstractas ante-
riores con conceptos familiares de la teoría de ecuaciones diferenciales.
Ejemplo 3 Sistemas diferenciables lineales. Sea T � R un intervalo,X = |n; U = |m; Y = |p; U cualquier subespacio lineal de L1loc (T;|m) ; esdecir, U = PC (T;|m) y A (�) 2 PC (T;|n�n) ; B (�) 2 PC (T;|n�m) ; C (�) 2PC (T;|p�n) ; D (�) 2 PC (T;|p�m) : Por el corolario (1), existe una únicasolución al problema de valor inicial
�x (t) = A (t)x (t) +B (t)u (t) ; t 2 T
x (t0) = x0(2.30)
para cada u (�) 2 U ; t0 2 T; x0 2 X: Recordemos que la matriz fundamentalX (t; t0) asociada a 2.30 es, por de�nición, la solución de la ecuación diferencialmatricial
�X (t) = A (t)X (t) ; t 2 T
x (t0) = In(2.31)
Esto signi�ca que las columnas xj (t; t0) de X (t; t0) resuelven los problemas devalor inicial
�x (t) = A (t)x (t) ; t 2 T
x (t0) = ej
donde ej es la j-ésima columna de In; j 2 n: La fórmula de variación de con-stantes da la siguiente representación explícita de la solución x (t) = '
�t; t0; x
0; u (�)�
de 2.30
'�t; t0; x
0; u (�)�= X (t; t0)x
0 +R tt0X (t; s)B (s)u (s) ds; t 2 T (2.32)
Si se hace� (t; x; u) = C (t)x+D (t)u
entoncesP= (T;U;U ; X; Y; '; �) es un sistema lineal diferenciable(de�nido por
las funciones matriciales A (�) ; B (�) ; C (�) ; D (�)). Dado que ' está de�nidasobre T 2 � X � U ;
Pes completo y reversibles. Ahora se determinarán los
operadores lineales � (t; t0) ; �(t; t0) asociados conP: Como una consecuencia
inmediata de 2.23 y 2.32 se obtiene para todo t0; t 2 T
� (t; t0)x = X (t; t0x)
44

La matriz fundamental de 2.30 es precisamente la representación matricial dela evolución del operador � (t; t0) respecto a la base estándar de |n: En lo quesigue se usará la misma notación � (t; t0) para ambos operadores lineales y susrepresentaciones matriciales. Dado que � (t; t0) � (t0; t) = In; los operadores� (t; t0) ; t; t0 2 T son todos invertibles. De 2.24 y 2.32 se obtiene para todot0; t 2 T
�(t; t0)u (�) =R tt0� (t; s)B (s)u (s) ds; u (�) 2 U (2.33)
Esto especi�ca la relación entre el operador entrada-estado �(t; t0) y el operadorde evolución � (t; s) para el sistema
P: Un caso especial sucede cuando T = R
y A (t) � A; B (t) � B; C (t) � C; D (t) � D son independientes del tiempo.En este caso el sistema de ecuaciones es
�x (t) = Ax (t) +Bu (t) ; t 2 Ry (t) = Cx (t) +Du (t) :
(2.34)
Sea eAt la matriz exponencial de�nida por la serie absolutamente convergente
eAt =P1
k=0tk
k!Ak; t 2 R (2.35)
Entonces la matriz fundamental tiene la forma X (t; t0) = eA(t�t0) y el mapeode transición de estados está dado por
'�t; t0; x
0; u (�)�= eA(t�t0)x0 +
R tt0eA(t�s)Bu (s) ds; t 2 R (2.36)
Esta fórmula muestra que el sistemaP
es invariante en el tiempo, asociadocon un semigrupo de operadores lineales � (t) = eAt: Dado que
Pes reversobñe
este semigrupo puede ser extendido a un grupo uno-paramétrico � =�eAt�t2R
de operadores lineales sobre |n:
2.5 Estabilidad y eigenmovimientos
Idealmente se desearía calcular explícitamente todas las soluciones de cadaecuación diferencial o sistema de ecuaciones, sin embargo como se sabe ac-tualmente, sólo algunas ecuaciones muy especí�cas lo permiten. De ahí la im-portancia del estudio de las propiedades cualitativas de las soluciones de lasecuaciones diferenciales que resuelva explícitamente dicha ecuación. Esto marcael comienzo de la teoría moderna de las ecuaciones difereciales cuyos inicadoresfueron A. M. Lyapuno y H. Poincaré, matemáticos, cuyos trabajos al inicio delsiglo pasado han motivado investigaciones recientemente.Se podría pensar en calcular numéricamente una ecuación diferencial y tomar
toda la información apartir de los resultados obtenidos, sin embargo en variosproblemas como los sistemas complejos, o los que involucran controles automáti-cos se requiere cierta información cualitativa acera de sus soluciones.Más aún, deseamos saber si cierta propiedad de las soluciones de un sistema
permance sin cambio alguno si el sistema sufre algún tipo de cambio(usualmente
45

llamado perturbación). En concreto, una solución númérica, y/o el cálculo dealgunas soluciones especí�cas no proveen de una respuesta satisfactoria.Este análisis cualitativo es importante dado que en la medición de las condi-
ciones iniciales o la propia ecuación diferencial involucra una aproximación; enefecto, en casi cualquier modelo matemático de un sistema físico se tienen lig-eras, en el mejor de los casos, incertidumbres. Por esto es importante el estudiode sensibilidad de un modelo particular a las pequeñas perturbaciones o cambiosen las condiciones iniciales y/o en sus parámetros. Otro inconveniente en el usode aproximaciones numéricas es que frecuentemente nos interesa mostrar quela solución de la ecuación diferencial tiende a cero cuando t ! 1, una aproxi-mación numérica sugerirá que esto es cierto, sin embargo no puede probarlo.Un fenómeno cualitativo de gran interés práctico es la noción de estabilidad
de un estado particular del sistema o de sus soluciones. Actualmente, el análisisde estabilidad se basa principalmente en estudiar las propiedades y condicionesbajo la cuales una solución es estable. La estabilidad de los sistemas lineales(elcaso más sencillo) se ha desarrollado ámpliamente y permite investigar los sis-temas casi lineales usando métodos analíticos. Tales sistemas no lineales sonimportantes ya que ningún sistema físico es lineal totalmente, la linealización deun sistema es una idealización de la realidad. El objetivo de estas investigacioneses encontrar bajo qué condiciones el añadir términos no lineales al modelo no sealtera drásticamente el comportamiento del sistema lineal, o expresado de otraforma, ¿qué condiciones permiten que el sistema perturbado se comporte más omenos como el sistema linealizado?Finalmente, algunos problemas no lineales no pueden ser linealizados ade-
cuadamente bajo ciertas aplicaciones de control, por lo tanto es necesario mane-jar dicha no linealidad en el sistema de tal forma que se alcance el objetivodeseado.
2.5.1 De�niciones básicas de estabilidad
Visto desde una perspectiva geométrica, consideremos un sistema físico cuyasecuaciones de movimiento están dadas por el sistema autónomo
x0= f (x) (2.37)
donde la función f con n componentes está de�nida en alguna región D de Rn:Asumimos que f 2 C1; lo cual garantiza la existencia y unicidad de solucionesdel problema de valor inicial. Entonces, las soluciones del sistema anteriorpueden ser representadas como curvas en el espacio fase y su comportamientopuede ser descrito por tales curvas. Sea x = x un punto de equilibrio del sistema,entonces la solución constante ' (t) � x es una solución del sistema 2.37. En elespacio fase la solución ' (t) � x se representa como un punto aislado.Ahora supongamos que el sistema se desplaza ligeramente del estado de
equilibrio, es decir, consideremos una solución (t) de 2.37 que pase a travésde x0 en el tiempo t0 donde la distancia euclidiana
x0 � x es pequeña. Sedesea conocer qué sucede al sistema cuando comenzamos el movimiento desde
46

x0 diferente de x pero cerca de él. ¿El movimiento resultante (t) permanecerácerca del estado de equilibrio x para t � t0? Si esto sucede, se puede decir,de manera muy general, que el sistema es estable para la solución ' (t) � x:Si el movimiento se mantiene cerca de la posición de equilibrio x0 y ademásla solución (t) tiende a regresar a la posición de equilibrio cuando el tiempot se incrementa in�nitamente, entonces se dice que el sistema tiene estabilidadasintótica respecto a las soluciones constantes ' (t) � x.En cambio, si la solución (t) abandona cualquier pequeña vecindad alrede-
dor de x se dice, a grandes rasgos, que el sistema presenta inestabilidad respectoa su solución constante ' (t) � x:
De�nición 11 La solución constante ' (t) � x de 2.37 se dice que es estable sipara cada número � > 0 podemos encontrar un númro � > 0(que depende de �)tal que si (t) es cualquier solución de 2.37 se tiene5 k (t0)� xk < �, entoncesla solución (t) existe para todo t � t0 y k (t)� xk < � para t � t0:
5Por conveniencia la norma es la distancia euclidiana que hace que la vecindad sea unaesfera con cento en x:
47

De�nición 12 La solución constante ' (t) � x se dice que es asintóticamenteestable si es estable y si existe un número �0 > 0 tal que si (t) es una soluciónde 2.37 se tiene k (t0)� xk < �0, entonces lim
t!+1 (t) = x:
La solución constante ' (t) � x se dice inestable si no es estable.Notemos que debido a que el sistema 2.37 es autónomo, y por lo tanto invari-
ante en el tiempo, los números �; �0; mencionados en las de�niciones anteriores,son independientes de t0: En este caso la estabilidad y estabilidad asintótica sedicen que son uniformes.Generalicemos el concepto de estabilidad para cualquier solución arbitraria
del sistema no autónomoy0= f (t; x) (2.38)
donde el vector f con n componentes está de�nido y es continuo en una regiónD = f(t; y) j0 � t � 1; jxj < ag de dimensión n+ 1; donde a es una constante.Asumimos también que en todo punto de f ,
@f
@xjcon j = 1; :::; n son continuas
en D y sea ' (t) alguna solución de 2.38 para 0 � t � 1. Sea �t; t0; x
0�donde
t0 � 0 una solución de 2.38 para la cual �t0; t0; x
0�= x0:
De�nición 13 Una solución ' (t) de 2.38 se dice que es estable si para cada� > 0 y cada t0 � 0 existe un � > 0 (� ahora depende de � y posiblemente de t0)tal que si j' (t)� x0j < �, la solución
�t; t0; x
0�existe para t > t0 y satisface��' (t)� �t; t0; x0��� < � para t � t0:
Podemos ejempli�car este concepto de manera geométrica para el caso n = 1
48

con la siguiente �gura
Se puede mostrar que si una solución es estable en el sentido arriba men-cionado para una t0 dada, entonces lo es también para cualquier otra condicióninicial t1 � t0: Por esta razón, al analizar la estabilidad de una solución esposible hacerlo con un t0 �jo, posiblemente t0 = 0:
De�nición 14 La solución ' (t) de 2.38 se dice que es asintóticamente establesi es estable y si existe6 un �0 > 0 tal que si
��' (t0)� x0�� < �0 la solución �t; t0; x
0�se aproxima a la solución ' (t) cuando t!1, esto es
limt!+1
�� �t; t0; x0�� ' (t)�� = 0Podemos decir que ciertas ecuaciones diferenciales cuya propiedad particular
es que para cada t0; x0, no únicamente para valores cercanos a x0; la solucióncorrespondiente
�t; t0; x
0�se aproxima a cero cuando t!1. En este caso la
solución cero es asintóticamente estable de manera global7 .Si una solución ' (t) es asintóticamente estable, pero no lo es globalmente,
es decir, no todas las soluciones se aproximan a ' cuando t ! 1; ¿cuál serála región de estabilidad asintótica? En otras palabras, dado un t0 describirun conjunto de valores iniciales x0 tales que el lim
t!+1
�� �t; t0; x0�� ' (t)�� = 0:Esto en en general un problema complicado de resolver pero muy común en lapráctica.
2.5.2 Análisis espectral de sistemas diferenciables lineales
Sea A 2 |n�n una matriz dada. Las trayectorias de estado del sistema libre sinsalidas están dadas por
�x = Ax (t) ; t 2 R (2.39)
6Notemos que �0 puede también depender de t0:7Las ecuaciones diferenciales lineales, como veremos adelante, cumplen la propiedad de
estabilidad global asintótica en general, no obstante para sistemas no lineales no sucede así.
49

Notemos primero que el origen x = 0 es siempre un punto singular del campovectorial x 7! Ax sobre |n y es por lo tanto un punto de equilibrio de 2.39. Másgeneralmente x 2 |n es un punto de equilibrio si y sólo si Ax = 0 es decir, el kerA es el conjunto de equilibrio de 2.39. Las trayectorias de 2.39 están descritaspor el grupo de operadores lineales
� (t) = eAt =P1
k=0tk
k!Ak; t 2 R
el cual tiene las siguientes propiedades.
Lema 2 Si A 2 |n�n; entonces para cada s; t 2 R se tiene
i)d
dteAt = AeAt = eAtA
ii) eA(t+s) = eAteAs
iii)�eAt��1
= e�At
iv) eS�1ASt = S�1eAtS; S 2 GIn (|)
Nuestro objetivo es mostrar que cada trayectoria de 2.39 puede ser represen-tada como una superposición de un número �nito de trayectorias relativamentesimples, los eigenmovimientos. Estos eigenmovimientos son determinados fá-cilmente una vez que la base de los eigenvectores generalizados de A ha sidoencontrada. Antes de enunciar con mayor detalle este concepto, recordemosalgunos resultados del álgebra lineal sobre el análisis espectral.Supóngase que | = C entonces Cn es el espacio de estados y A 2 Cn�n: Sea
� (A) es espectro de A, es decir el conjunto de eigenvalores
� (A) = f� 2 C; det (�In �A) = 0g
� (A) es el conjunto de raíces del polinomio característico de A
�A (s) = det (sIn �A) = sn + an�1sn�1 + :::+ a1s+ a0
Factorizando �A (s) 2 C [s] de acuerdo con el Terorema fundamenteal del álge-bra obtenemos
�A (s)] =lY
j=1
(s� �j)m(�j) ; �i 6= �j para i = j
m (�j) se dice que es la multiplicidad algebraica del eigenvalor �j mientrasdimker (�jIn �A) � m (�j) es su multiplicidad geométrica. La siguiente de-scomposición es básica para nuestro análisis
Lema 3 (Descomposición espectral) Si �1; :::; �l son los distintos eigenval-ores de A 2 Cn�n con multiplicidades algebraicas m (�1) ; :::;m (�l) entonces
Cn = ker (�1In �A)m(�1) � :::� ker (�lIn �A)m(�l) (2.40)
50

es decir Cn es la suma directa de los eigenespacios generalizados ker (�jIn �A)m(�j) ;j 2 l: Más aún dimker (�jIn �A)m(�j) = m (�j) para cada j 2 l: z 2 Cn sedice que es un vector generalizado de orden m � 1 de A si
(�In �A)m z = 0 y (�In �A)m�1 z 6= 0
Por tanto los elementos no cero del ker (�jIn �A)m(�1) son los eigenvec-tores generalizados de orden � m (�j) : Las proyecciones correspondientes a ladescomposición 2.40
Pj : Cn �! ker (�jIn �A)m(�j) ; j 2 lx = x1 � :::� xl 7! xj
son llamadas eigenproyecciones de A: Las siguientes propiedades de Pj ; j 2 lson inmediatas de la de�nición anterior
P 2j = Pj ; PjPk = 0 si j 6= k;lX
j=1
Pj = In (2.41)
Además,APj = PjA = �jPj +Nj ; j 2 l
donde Nj = (A� �jIn)Pj es nilpotente. Nj es llamado eigennilpotente cor-respondiente al eigenvalor �j de A. Añadiendo estas igualdades y usando 2.41obtenemos la representación espectral de A
A = A
lXj=1
Pj =
lXj=1
(�jPj +Nj)
Si Nj = 0; �j se dice que es semi-simple. A es diagonalizable si y sólo si cadaeigenvalor es semi-simple y en este caso
A = AlX
j=1
Pj =lX
j=1
�jPj
Ahora regresemos al movimientro libre del sistema 2.39. Un estado inicial z 2ker (�In �A)m surge del siguiente eigenmovimiento generalizado de 2.39
eAtz = e�te(A��I)t
z = e�tm�1Xj=0
tj
j!(A� �I)j z; t 2 R: (2.42)
La trayectoria permanece en el subespacio lineal generado por z;Az; :::; Am�1zpara todo t � 0: En particular, si z es un eigenvector, Az = �z; entonces
eAtz = e�tz; t 2 R (2.43)
permance siempre en el subespacio complejo de dimensión uno a través de z:Estas trayectorias son llamadas eigenmovimientos del sistema 2.39.
51

Como funciones del tiempo, cualquier eigenmovimiento generalizado de or-den m es el producto de la exponencial e�t y un vector polinomial
m�1Xj=0
tj
j!(A� �In)j z 2 Cn [t]
de grado m� 1. Si Re� 6= 0 la parte exponencial determina el comportamientoextremo de la trayectoria.
eAtz tiende a cero o a in�nito dependiendo de siRe� < 0 o Re� > 0:
Nota 2 Si �0 = 0 2 � (a) los eigenvectores asociados son puntos de equilibirode 2.39. Si z es un eigenvector generalizado asociado de orden m entoncesel correspondiente eigenmovimiento generalizado depende polinomialmente deltiempo, z (t) = eAtz =
Pm�1j=0 (1=j!)A
jztj :
Ya que por el Lema anterior cada estado incial puede ser representado comouna suma de eigenvectores generalizados, se obtiene el siguiente corolario.
Corolario 4 Cada trayectoria del sistema libre 2.39 es una superposición de loseigenmovimientos generalizados. Más precisamente, si P1; :::; Pl son las eigen-proyecciones de A 2 Cn�n correspondientes a los eigenvalores distintos �1; :::; �lcon multiplicidad algebráica m (�1) ; :::;m (�l) entonces
eAtx0 =lP
j=1
e�jtm(�j)�1Pk=0
tk
k! (A� �jIn)kPjx
0; t � 0; x0 2 Cn
En particular, si A es diagonalizable entonces
eAtx0 =lP
j=1
e�jtPjx0; t � 0; x0 2 Cn
La fórmula siguiente proporciona un método para calcular eAt en el caso deser diagonizable. Si
�z1; :::; zn
�es una base de eigenvectores de A; Azi = �iz
i
entonces S =�z1; :::; zn
�2 GIn (C) satisface
eAt = S diag�e�1t; :::; e�nt
�S�1
Para el caso general, recordemos que si J (�;m) es un bloque de Jordan de ordenm 2 N, es decir
J (�;m) =
266664� 1 0
. . .. . .. . . 1
0 �
377775 2 Cm�m; � 2 C; m 2 N
52

Entonces
eJ(�;m)t = e�t
266666664
1 t=1! t2=2! � � � tm�1= (m� 1)!. . .
. . .. . .
.... . .
. . . t2=2!
0. . . t=1!
1
377777775;
t 2 R; � 2 C; m 2 N
Ahora supongase que S�1AS está en la forma canónica de Jordan
S�1AS = �lj=1 �kjk=1 J (�j ;mjk)
donde m (�j) =Pkj
k=1mjk es la multiplicidad algebraica de el eigenvalor �j 2� (A) y � denota la suma directa de matrices. Entonces
eAt = Sh�lj=1 �
kjk=1 e
J(�j ;mjk)tiS�1; t 2 R
A partir de ahora, se supondrá que A 2 Rn�n. Los eigenmovimientos reales omodos del sistema 2.39 se obtienen tomando en cuenta las partes real e imagi-naria de los eigenmovimientos complejos. Si � 2 � (A) es real y z un eigenvectorreal para �, entonces el eigenmovimiento asociado a 2.43 es real. Considerandoque si � = + i! 2 � (A) no es real (! 6= 0) y z = (zi) 2 Cn es un eigen-vector asociado entonces � = � ! 2 � (A) y el vector conjugado complejoz = (zi) 2 Cn es un eigenvector de A para �:Tomando Re z = (1=2) (z + z) 2 Rn y Im z = (1=2i) (z + z) 2 Rn como
estados iniciales obtenemos los siguientes eigenmovimientos reales de 2.39
eAt (Re z) = Re�eAtz
�= Re
�e�tz
�= e t [(cos!t)Re z � (sin!t) Im z]
eAt (Im z) = Im�eAtz
�= Im
�e�tz
�= e t [(sin!t)Re z + (cos!t) Im z]
Existe una diferencia cualitativa entre los modos correspondientes a los val-ores reales e imaginarios de los eigenvalores. En el caso real tenemos una trayec-toria de dimensión uno a lo largo del eje real Rz que decrece(se contrae) si � < 0,constante si � = 0 y creciente(se expande) si � > 0: En el caso complejo se tieneun movimiento oscilatorio de dimensión dos en el plano generado por Re z;Im z 2 Rn. Este movimiento es decreciente si Re� < 0 y creciente si Re� > 0
53

Algunos eigenmovimientos típicos son
Eigenmovimientos reales generalizados se obtienen tomando las partes real eimanginaria de los eigenmovimientos complejos generalizados 2.42. Si � 2 � (A)es real y z es un eigenvector real generalizado de orden m para �; entonces 2.42es un eigenmovimiento real generalizado que permanece para todo t � 0 en elsubespacio lineal de dimensión m
spanR�z;Az; :::; Am�1z
� Rn
Si � = + i! 2 � (A) ; ! 6= 0 y z 2 Cn es un eigenvector generalizado asociadode orden m entonces obtendremos dos eigenmovimientos reales generalizadoscon el par �; � 2 � (A) y el eigenvector generalizado z
eAtRe z = Re�eAtz
�= Re e�t
m�1Xj=0
tj
j!(A� �In)j z
= e tm�1Xj=0
tj
j!
h(cos!t)Re (A� �In)j z � (sin!t) Im (A� �In)j z
i; t � 0
54

eAt Im z = Im�eAtz
�= Im e�t
m�1Xj=0
tj
j!(A� �In)j z
= e tm�1Xj=0
tj
j!
h(cos!t) Im (A� �In)j z + (sin!t)Re (A� �In)j z
i; t � 0
Ambas trayectorias son válidas para todo t � 0 en el subespacio de dimensión2m
spanR
nRe (A� �In)j z; Im (A� �In)j ; j = 0; :::;m� 1
oDado que A es real, su espectro puede se escrito de la forma
� (A) =��1; :::; �r; �1; :::; �c; �1; :::; �c
donde �i 2 R; i 2 r y �i 2 CnR; i 2 c: La multiplicidad algebráica de �i y�i son la misma. Además, si z1; :::; zm(�i) es una base del ker (�iIn �A)m(�i)
entonces z1; :::; zm(�i) es una base del ker��iIn �A
�m(�i) y Re z1; :::;Re zm(�i);Im z1; :::; Im zm(�i) 2 Rn es una base(sobre R) del subespacio lineal real dedimensión 2m (�i)
Rn\�ker (�iIn �A)m(�i) � ker
��iIn �A
�m(�i)�= kerR
�j�ij2 In � 2 (Re�i)A+A2
�m(�i)La versión real de la descomposición espectral 2.40 es
Rn = �ri=1 kerR (�iIn �A)m(�i) ��ci=1 kerR
�j�ij2 In � 2 (Re�i)A+A2
�m(�i)Como consecuencia se obtiene el siguiente corolario que es la versión real delcorolario arriba descrito
Corolario 5 Sea A 2 Rn�n, entonces cada trayectoria real eAtx0; x0 2 Rn de2.39 es una superposición de los eigenmovimientos generalizados reales(modos).
Por superposición de los eigenmovimientos del sistema 2.39, diferentes pa-trones de movimientos libres alrededor del origen pueden ser generados depen-diendo del número de eigenmovimientos crecientes, decrecientes, periódicos oestacionarios del sistema. Para un sistema lineal de dimensión dos es posibledar una clasi�cación completa del patrón de �ujo alrededor del estado de equi-librio x = 0: Sea
�z1; z2
�una base de R2 tal que la representación matricial de
A : R2 ! R2 respecto a esta base está en la forma canónica de Jordan. Portanto, hay tres tipos de matrices de 2� 2 con forma de Jordan para los reales
i)
��1 00 �2
�ii)
�� 00 �
�iii)
�� ��� �
�donde �1; �2; �; �; � 2 R. Los correspondientes movimientos libres a través decualquier punto inicial a 2 R2 son
i)
�a1e
�1t
a2e�2t
�ii)
�a1e
�t + a2te�t
a2e�t
�iii)
�a1e
�t cos�t� a2e�t sin�ta1e
�t sin�t+ a2e�t cos�t
�
55

Como resultado tenemos que para cualquier A 2 R2 el retrato fase de �x =
Ax alrededor del origen coincide cualitativamente exactamente con uno de lospatrones mostrados anteriormente. Las primeras seis �guras corresponden alcaso (i), las siguientes tres �guras al caso (ii) y las úlitmas seis al caso (iii) :Más precisamente, el retrato fase particular dependerá de los vectores z1; z2 yde la magnitud de �1 y �2; �; � y �:Para obtener una representación del �ujo de un sistema diferenciable no
lineal invariante en el tiempo con espacio de estados en R2, el primer paso esdeterminar el retrato fase de su linealización alrededor de cada uno de sus es-tados de quilibrio. El segundo paso es obtener las características globales talescomo ciclos límite, conexiones entre puntos silla(separatrices), conexiones al in-�nito(órbitas no acotadas), órbitas periódicas, etc. Existe una teoría cualitativamuy rica de los sistemas diferenciales en el plano.
56

Capítulo 3
Álgebra diferencial yplanitud
3.1 Introducción
En varias aplicaciones en ingeniería no se dispone de las mediciones del vec-tor de estado completo del sistema debido a que la instrumentación puede serexcesivamente costosa o incluso que no existan sensores adecuados para su deter-minación, lo que limitaría en primer momento las tareas de monitoreo y control.Ello motiva al empleo de estimadores o reconstructores de estados a partir delas mediciones disponibles, para lo cual ya se han desarrollado diversos enfoquesy soluciones [33], [14]. El diseño de criterios que permitan de�nir si un sistemaes controlable parcial o totalmente es vital para proceder a la implementaciónde controladores de sistemas.Para resolver lo anterior se han desarrollado diferentes metodologías que
han permitido inferir u observar estados a partir de mediciones disponibles en elsistema y determinar las condiciones de controlabilidad del mismo, tales son losesquemas clásicos como el �ltro de Wiener, el �ltro de Kalman u observadoresde tipo Luenberger.Un sistema no forzado se dice que es observable si y sólo si es posible de-
terminar cualquier estado(inicial arbitrario) x (t) = xt usando únicamente unregistro �nito y (�) para t � � � T de las salidas.Sea el sistema
�x = Ax+Bu
y = Cx
donde x 2 Rn , y 2 Rm y m < n.Se desea expresar los estados del sistema
�x en función de las salidas y, esto
57

es x = C�1y, para lo cual hacemos
y = Cx�y = C
�x = CAx
��y = CA
�x = CAAx = CA2x
y000
= CA3x
:::
yn = CAnx
de donde se sigue que
y =
2666664y�y��y:::yn
3777775 =266664
CCACA2
:::CAn
377775 = OO es la matriz de observabilidad.No obstante, la matriz C no siempre corresponde con el número total de
estados, por lo que y no representará todas las salidas del sistema, por lo tantose requerirá inferir otras salidas bx, tales que u = f (y) = f (Cbx) : Una ecuaciónpara estimar estados es:
�bx = bAbx+ bBu+ ky (3.1)
Existe un error de estimación e = x� bx para el cual es posible encontrar sudinámica
�e =
�x�
�bx. Dado que �x = Ax+Bu y
�bx = bAbx+ bBu+ ky se escribe:�e = Ax+Bu� bAbx+ bBu+ ky
como bx = x� e y y = Cx nos queda:
�e = Ax+Bu� bA (x� e) + bBu+ kCx
la cual puede expresarse como:
�e = bAe+ hA� kC � bAix+ hB � bBiu
Si bB = B y bA = A� kC entonces�e = bAe = (A� kC) e, y para que el error sea
estable hacemos bA < 0.Tomemos la ecuación 3.1 y reescribámosla de la forma:
�bx = (A� kC) bx+Bu+ kyla cual puede ser expresada como:
�bx = Abx+Bu+ k (y � Cbx)58

Esta última ecuación se le conoce como observador tipo Luenberger.Sin embargo, antes de proceder a diseñar una metodología de observación
y/o control, se debe veri�car si efectivamente las variables de estado del sistemabajo estudio son observables dado el conjunto de mediciones disponibles. Lasmetodologías para veri�car esto, como ya vimos, son los criterios o pruebas deobservabilidad y controlabilidad [21]. Varios planteamientos han sido diseñadosy propuestos para la síntesis de observadores, en el caso de sistemas no lineales setienen pruebas basadas en aplicar criterios algebráicos de observabilidad y con-trolabilidad lineal a los sistemas linealizados por series de Taylor, no obstanteestos criterios sólo presentan validez local. También se han presentado criteriosde observabilidad para sistemas no lineales utilizando herramientas de geometríadiferencial, pero esto no garantiza que las transformaciones(difeomor�smos) em-pleadas sean suprayectivas e invertibles.A principios de los 90 una variedad de planteamientos han sido propuestos
para la síntesis de observadores en sistemas lineales y no lineales utilizandoel enfoque del álgebra diferencial [7], [22], [23], [24]. M. Fliess es el primeroen introducir el enfoque del álgebra diferencial en la teoría del control parasistemas lineales y no lineales [11]. Una de las características de importancia deeste enfoque es que evitan ecuaciones implícitas y esto representa una ventaja altratar ciertos problemas, además que los resultados obtenidos son más generalesy por lo tanto son válidos en el dominio de los campos diferenciales que describena los sistemas dinámicos [18]. Con el álgebra diferencial surgen nuevos conceptostales como el de sistemas diferencialmente planos, sistemas diferencialmente noplanos y sistemas Luivilianos [10], [19].En lo que sigue plantearemos la teoría básica del álgebra diferencial [19] y la
utilizaremos para analizar la observabilidad de un sistema biológico modeladoa través de ecuaciones diferenciales ordinarias.
3.2 Notación y de�niciones básicas del álgebradiferencial
A continuación se presentan las de�niciones y conceptos básicos del álgebradiferencial aplicados a la teoría del control1 .
De�nición 15 La pareja (K; �) donde � es la derivada sobre el campo K recibeel nombre de campo diferencial. Si además el operador derivada � es únicoentonces se dice que el campo diferencial es ordinario.
Ejemplo 4 El operador � : R (x) ! R (x) de�nido de forma usual, es unaderivada sobre R (x), por lo tanto (R (x) ; �) determina un campo diferencial.
De�nición 16 Sea (K; �) un campo diferencial, al subconjunto CK = fc 2 K : � (c) = 0gde K se le da el nombre de campo de constantes de K:
1Esta teoría es desarrollada con detalle en [25].
59

Ejemplo 5 Sea (R (x) ; �) un campo diferencial con � : R (x) ! R (x) de�nidode la forma usual, si tomamos al subconjunto R � R (x), es claro que � (R) = 0:
Ejemplo 6 Q;R y C son campos triviales de constantes.
De�nición 17 Una extensión de campos diferenciales H=k está dada por doscampos diferenciales H y k; tal que:
� k es un subcampo de H
� el operador derivada de�nido en k es una restricción de H en k del oper-ador derivada de�nido en H.
Ejemplo 7 R heti =R es una extensión de campos diferenciales.
De�nición 18 Un campo de Hardy H es un conjunto de gérmenes de funcionesde valor real sobre vecindades borrosas de +1 en R (o lo que es lo mismo, sobresemilíneas positivas en R), el cual es cerrado bajo la derivación, y además formaun campo bajo las operaciones usuales de adición y multiplicación.
Ejemplo 8 Los ejemplos más simples de campos de Hardy son: Q;R y R (x)(campo de funciones racionales), donde cada número real es identi�cado comoun germen constante y x es el germen determinado por la función identidadsobre R: Otro ejemplo está dado por el campo L-Hardy, el cual consiste defunciones logarítmico-exponenciales sobre variables en un campo de Hardy.
Nota 3 El campo de constantes CH está contenido en todo campo de Hardy H:
Nota 4 Sean H un campo de Hardy y f 2 H; f 6= 0: Entonces H contieneun elemento 1=f , lo cual implica que f (t) 6= 0 para un t 2 R su�cientementegrande. Dado que f
0 2 H; f es diferenciable para todo t 2 R su�cientementegrande, por lo tanto f (t) es continua, y además es siempre positiva o siemprenegativa o nula para todo t su�cientemente grande, lo misma será cierto paraf0(t) puesto que H es cerrado bajo la derivación lo cual implica que cada f 2
H es monótono para todo t su�cientemente grande. En particular, para cadaf 2 H, el lim
t!+1f (t) existe como un elemento del conjunto R [ f+1;�1g :
De�nición 19 Se de�ne un sistema H=k como una extensión de campos difer-enciales �nitamente generada.
Ejemplo 9 Sea H=k una extensión de campos diferenciales generada por lascuatro variables x1; x2; x3; x4 relacionadas por las dos ecuaciones diferencialessiguientes
�x1 +
��x3
�x4 = 0 (3.2)
�x2 +
�x1 +
��x3
�x4
�x4 = 0
donde k = R y H = R hx1; x2; x3; x4i : Entonces la extensión diferencial H=k esin�nitamente generada, ya que el número de variables es �nito, y además estánrelacionadas por un número �nito de ecuaciones diferenciales, por lo tanto laextensión H=k así de�nida es un sistema.
60

De�nición 20 Una dinámica es de�nida como una extensión diferencial alge-braica y �nitamente generada H=k hui del campo diferencial k hui ; donde k huidenota al campo diferencial generado por k y elementos de un conjunto �nitou = hu1; u2; :::; umi de cantidades diferenciales.
Ejemplo 10 Considerando el ejemplo anterior y haciendo u1 = x3 y u2 =�x4. La extensión H=k hui es diferencialmente algebraica y tiene la siguienterepresentación
�x1 = ���u1u2�x2 = �
�x1 +
��u1x4
�x4 (3.3)
�x4 = u2
De donde se deduce que la dimensión de la dinámica es 3 y (x1; x2; x4) es unestado generalizado.
De�nición 21 Sea fu; yg un subconjunto del campo diferencial H de la dinámicadada por H=k hui : Decimos que un elemento x 2 H es observable respecto defu; yg si este es diferencialmente algebraico sobre k hu; yi, de lo cual se desprendeque un estado x se dice que es observable si y solamente si es observable conrespecto a fu; yg : Una dinámica H=k hui con salida y en H se dice que es alge-braicamente observable si y solamente si cualquier estado tiene esta propiedad.
Ejemplo 11 Sea la dinámica diferencial H=k hui una entrada-una salida dadapor:
�x1 = 0�x2 = u+ x2 (3.4)
y = x1 + x2
donde k hui = R hui ; H = R hx1; x2; ui : Es claro que los estados x1; x2 sonobservables ya que ambos satisfacen un polinomio diferencial sobre k hu; yi deforma respectiva, esto es
� Para x2 se tiene que y = x1 + x2 =)�y =
�x1 +
�x2 =)
�y =
�x2 = u + x2;
entonces�y � u� x2 = 0:
� Para x1 se tiene que y = x1 + x2 =) y � x1 � x2 = 0; entonces y � x1 ��y � u = 0:
De�nición 22 Sea un sistema de ecuaciones diferenciales ordinarias dado por
G�t; x; y;
�y; :::; y(m); Q
�= 0 (3.5)
donde x = [x1; x2; :::; xn] 2 Rn es el vector de estados y Q = [q1; q2; :::; qn] 2 Rles el vector de parámetros constantes. Si es posible encontrar un mapeo suaveW : Rj ! Rl tal que
Q =W�y;
�y;��y; :::; y(j)
�61

Entonces el vector de parámetros Q se dice ser algebráicamente identi�cable conrespecto a la salida disponible y:
Nota 5 De manera general se puede decir que si es posible expresar el vector deparámetros Q como función de la salida y de sus derivadas, �nitas en el tiempo,entonces se dice que el sistema es algebráicamente identi�cable con respecto ala salida y:
Ejemplo 12 Sea el sistema dado por�x1 = ax2�x2 = x2 + x1 (3.6)
y = x2
De la salida y así de�nida es claro que el parámetro a satisface que
a =
��y � �
y
y; y 6= 0 (3.7)
Por lo tanto el parámetro a es algebráicamente identi�cable.
De�nición 23 Sea el sistema dado por�x (t) = A (x; u) (3.8)
y = h (x; u)
donde x (t) = (x1; x2; :::; xn)| 2 Rn es el vector de estados, u (t) = (u; f (t)) 2
Rm���R� donde u es el vector de entrada y f (t) es el vector de fallas, y (t) 2 Rpes el vector de salida, A y h son funciones vectoriales analíticas. Un sistemacomo 3.8 se dice ser diagnosticable si f es algebráicamente observable conrespecto a u y y:
Ejemplo 13 Sea el sistema dado por�x1 = (x1 + x2) (u+ f)�x2 = u
y = x1 + x2
es claro que el sistema es diagnosticable, ya que
f =
�y � uy
� u; y 6= 0
Nota 6 La propiedad de diagnosticabilidad sobre un sistemaPno implica que
el sistemaPsea observable y viceversa, como se muestra a continuación.
Sea el sistema dado por�x1 = �x1 + x2�x2 = x2 + u+ f
y = x2
62

El sistema con salida y así de�nida es diagnosticable, ya que f =�y�y�u; pero
el sistema no es observable con respecto a u e y; ya que x1 no es observable.Por otra parte sea el sistema dado por
�x1 = x2 + u�x2 = x2 + f (x1 + fx2)
y = x1
En este caso el sistema no es diagnosticable con respectoa u e y, sin embargo,es observable ya que x1 = y y x2 =
�y � u:
De�nición 24 El número entero de variables, las cuales no pueden ser expre-sadas en términos de las salidas y un número �nito de sus derivadas en eltiempo, es conocido como el defecto del sistema no plano, es decir, sea el sis-tema dado por H=k y además sea y = (y1; :::; ym) un subconjunto de H, tal quey es una base de trascendencia diferencial de H=k, entonces al entero, que hacemínimo el grado de trascendencia diferencial de H=k hyi se le da el nombre dedefecto algebraico.
Ejemplo 14 Sea H=k la extensión de campos difernciales generada por las vari-ables x1; x2 relacionadas por la ecuación diferencial
�x1 = x1 +
� �x2
�3(3.9)
donde k = R; H = R hx1; x2i : Entonces H=k determina un sistema con undefecto algebraico igual a uno puesto que la solución no puede ser expresada sinla integración de al menos una de las variables.
De�nición 25 Si existe una base de trascendencia diferencial y = (y1; :::; ym)de H=k tal que H = k hyi ; entonces a esta base de trascendencia diferencial yse le de�ne como salida linealizable o salida plana del sistema H=k:
Ejemplo 15 Sea H=k el campo diferencial generado por las variables x1; x2; x3; ulas cuales están relacionadas por las siguientes ecuaciones diferenciales
�x1 = x2 + x
21
�x2 = x3 (3.10)�x3 = u
donde k = R y H = R hx1; x2; x3; ui ; entonces y = x1 es una salida plana osalida linealizante, ya que es fácil veri�car que x1 = y; x2 =
�y�y2; x3 =
��y�2y �y;
u = y(3) � 2 �y2� 2y��y:
De�nición 26 Un sistema H=k se denomina diferencialmente plano si y sola-mente si su defecto algebraico diferencial es igual a cero.
63

Ejemplo 16 Sea H=k el campo diferencial generado por las variables x1; x2; x3; urelacionadas por las ecuaciones diferenciales
�x1 = x2 + x
21
�x2 = x3 (3.11)�x3 = u
donde k = R y H = R hx1; x2; x3; ui : Entonces H=k determina un sistema segúnla de�nición 5. Por otra parte, sea la salida de�nida por
y = h (x) = x1
Entonces
y = x1�y = x1 = x2 + x
21
=) x2 =�y � y2
x3 =�x2 =
��y � 2y �y
=) x3 =��y � 2y �y
u =�x3 = y(3) � 2 �y
2� 2y��y
=) u = y(3) � 2 �y2� 2y��y
Por lo tanto la salida y = x1 así de�nida, resulta ser una salida plana o basede trascendencia de H=k, ya que H = k hyi : Lo cual implica que el defecto delsistema anterior es igual a cero, y por lo tanto el sistema es diferencialmenteplano. Las componentes de y se denominan salidas planas del sistema o salidaslinealizantes.
De�nición 27 Un sistema H=k es diferencialmente no plano si y solamente sisu defecto algebraico es diferente de cero.
Ejemplo 17 Sea H=k el campo diferencial generado por las variables x1; x2; x3; urelacionadas por las ecuaciones diferenciales siguientes
�x1 = x2 + x
23
�x2 = x3 (3.12)�x3 = u
y = x2
donde k = R y H = R hx1; x2; x3; ui ; entonces H=k determina un sistema.
64

Considerando el sistema anterior y la salida de�nida por y = x2 se tiene que
�y =
�x2
x3 =�y
u =��y
�x1 = x2 + x
23
�x1 = y +
�y2
Entonces el sistema anterior tiene un defecto algebraico igual a uno, puesto quex1 es la única variable del sistema que no puede ser representada como unafunción algebraica diferencial de la salida y. Así, el sistema anterior es noplano.
De�nición 28 Seal el sistema H=k y supongamos que M es un campo inter-medio de H=k; (es decir, k � M � H) tal que M=k es un subsistema plano deH=k, entonces diremos que H=k es Liouvilliano si los elementos que pertenecena H �M pueden ser obtenidos por una adjunción de una integral o exponencialde integrales de elementos del subcampo plano M de H:
Ejemplo 18 Sea el sistema H=k no lineal de�nido por 3.12. Del ejemplo an-terior se tiene que el subsistema plano M=k del sistema 3.12 está dado por
�x2 = x3 (3.13)�x3 = u
donde M = R hx2; x3; ui con salida plana y = x2 y x1 es la única variable queno pertenece al subsistema plano, sin embargo puede ser obtenida por la relaciónintegral
x1 =
Z �x2 (t) + x
23 (t)
�dt =
Z �y (t) +
�y2(t)
�dt (3.14)
Esto es, x1 obtenida por una integral de elementos del campo plano M; o deforma equivalente, por una integral elemental de una función diferencial de y:Por lo tanto el sistema no lineal es Liouvilliano.
65

Capítulo 4
Oscilaciones de calcio
4.1 Introducción
En [26] se menciona una amplia variedad de fenómenos biológicos que propor-cionan claros ejemplos de control, incluyendo regulación de genes, transducciónde señales, mecanismos de retroalimentación hormonal, inmunológica y car-diovascular; control muscular, locomoción, atención y conciencia, dinámica depoblaciones y epidemias. La biología molecular, la biología integrativa, y elprocesamiento de imagenes médicas son áreas del conocimiento que represen-tan sistemas biológicos clásicos y han demostrado que los principios de controlpueden ser utilizados para entender su naturaleza y construir un sistema deingeniería sobre ellos.Una forma de ver la vida a nivel celular es el considerarla como una red
inalámbrica de interacciones entre proteínas, DNA, pequeñas moléculas rela-cionadas en la transferencia de señales y la transferencia de energía. El estudiode estas redes celulares conduce a la formulación de varias preguntas, talescomo: ¿Es posible caracterizar estos comportamientos en términos de la teoríade control?, ¿Las variables de estado del sistema como concentraciones de pro-teína, RNA, otras sustancias químicas, etc. de qué manera se pueden estimar?Generalmente esta clase de interrogantes pueden ser aclaradas por medio de laidenti�ciación y observación lo cual constituye una parte importante de la teoríadel control.Las propiedades dinámicas de estos sistemas: estabilidad, presencia de com-
portamientos oscilatorios, etc. son de importancia y las técnicas usadas por lateoría del control jugarán un papel importante en el análisis de dichos sistemasbiológicos. El medio ambiente celular contiene perturbaciones o ruido en variasformas, y al mismo tiempo se presentan variaciones en distintos componentesquímicos. El lazo retroalimentado está presente en la célula y ayuda a regularapropiadamente estas variaciones.Los organismos vivos usan ondas que se propagan a través de medios ex-
citables para transportar información. Las ondas de activación eléctrica en el
66

corazón, la propagación de potenciales de acción a través de axones de neuronas,la liberación de calcio durante la fertilización de ovocitos son algunos ejemplosde esto. La excitabilidad del medio es uno de los factores fundamentales quehacen posible la propagación en estos casos. Los sistemas químicos y físicostambién pueden ser excitables y presentar comportamientos espacio temporalesmuy similares a los de los sistemas biológicos antes mencionados.El ion calcio, Ca2+, es un mensajero secundario usado tanto a nivel intracelu-
lar como intercelular por una enorme variedad de células, constituye un ejemploparadigmático del uso de la interacción entre dinámica y geometría para generardistintos tipos de respuestas. El calcio está involucrado en el inicio de la vida yen la muerte celular, participa en la contracción muscular, en particular, en ladel músculo card¬aco, en la transmisión de señales neuronales y en los procesosasociados a la memoria [6]. La capacidad del calcio para transmitir informa-ción debe, por lo tanto, ser versátil y especí�ca a la vez. Para ello las célulasexplotan al máximo la variedad de comportamientos a los que la distribuciónno homogénea de los componentes involucrados en su transporte puede dar lu-gar. Por ejemplo, en los músculos, una elevación localizada de la concentraciónde calcio da lugar a la relajación muscular mediante la apertura de canales depotasio sensibles al calcio. La elevación global de esta concentración, por otrolado, da lugar a la contracción del tejido [6]. Por lo tanto, la información delas señales de calcio está contenida tanto en la dinámica temporal como en ladistribución espacial de su concentración.Las células en las que más se ha estudiado la dinámica espacio temporal del
calcio son los miocitos y ovocitos. La variedad de señales observadas en ovocitosinmaduros, las que van desde comportamientos espacialmente localizados hastaondas globales que se propagan por toda la célula, es consecuencia del hecho deque el calcio involucrado en las mismas es liberado desde reservorios internos através de canales que están distribuidos de forma espacialmente no homogénea.Uno de los rasgos más característicos de los canales involucrados en la liberaciónde calcio desde compartimientos intracelulares es el hecho de que su probabilidadde apertura es modulada por la concetración de calcio. Esto provee a la célulade un intrincado mecanismo no lineal de regulación que se mani�esta en unfenómeno conocido como �liberación de calcio inducida por calcio�. De estemodo el citosol1 funciona como un medio excitable en lo que se re�ere a lapropagación de las señales de calcio. Existe pues, una importante relación entrela dinámica y el medio físico en que se desenvuelve el sistema que puede tenerimplicaciones relevantes en los mecanismos de señalización por calcio.Oscilaciones periódicas en las concentraciones de calcio son observadas en
todos los niveles de organización biológica, con periodos que �uctuan desde ran-gos pequeños hasta años. Estudios experimentales y teóricos han descubierto losmecanismos que gobiernan la mayoría de estos fenómenos oscilatorios. Ritmoscelulares de varios periodos están asociados con la regulación de la actividadenzimática, recepción, transporte o ritmos genéticos de naturaleza no eléctrica y
1El citosol es el medio intracelular, está separado del medio extracelular por la membranaplasmática y contiene varios compartimientos internos encargados de diferentes funciones celu-lares.
67

con la regulación de conductancias iónicas en células eléctricamente excitables.Es evidente que para la señalización celular es importante no sólo los estadosestacionarios, también lo son los multiestables, periódicos, multirrímicos y pro-cesos oscilatorios no periódicos.Durante los últimos 15 años el fenómeno de las oscilaciones intracelulares de
calcio Ca2+ ha sido un buen ejemplo de un comportamiento oscilatorio a nivelcelular. Estas oscilaciones son observadas en distintos tipos de células con difer-entes periodos, lo cual ocurre espontáneamente o cuando la célula es estimuladapor una hormona o un neurotransmisor. Las oscilaciones de calcio juegan un rolimportante en la transducción de señales desde los receptores de la membranacelular hasta las encimas y genes, controlando la compleja red bioquímica de lacélula. En prácticamente cualquier tipo de célula la oscilación de Ca2+ juegaun rol importante en el control del comportamiento celular, funcionando comoun agente de señalización para una variedad de procesos celulares tales como lasecreción química, la división y movimiento celular. Distintos modelos de os-cilaciones de Ca2+ han sido propuestos y exhiben una diversidad de respuestas,tanto estados estacionarios, oscilaciones que brincan, multirrítmicas o aquellasque presentan caos.
4.2 Modelo de oscilaciones de Ca2+
4.2.1 Mecanismos involucrados en el sistema
En la mayoría de las células estímulos externos disparan la síntesis de inositol1,4,5-trifosfato IP3 un mensajero intracelular que ata a los receptores localizadosen la membrana del retículo endoplásmico con lo que inicia la liberación deCa2+ en citosol. Como la liberación de Ca2+ a través del canal receptor=Ca2+
de IP3 es activada por el mismo Ca2+, entonces la liberación de Ca2+ poseeuna naturaleza autocatalítica la cual es responsable de las oscilaciones de Ca2+
bajo condiciones adecuadas. Este fenómeno por el cual el Ca2+ citosólico activasu propia liberación desde el interior celular es conocido como inducción Ca2+
liberación Ca2+ y denominado CIRC 2 .Huart y colaboradores [9].proponen un modelo que es extensión del prop-
uesto por Dupont y Goldbeter(1993) [4] para contabilizar la existencia de os-cilaciones simples de Ca2+ en respuesta a la estimulación extracelular. El mod-elo original únicamente involucraba dos variables, la concentración de Ca2+ encitosol y la concentración intravesicular. La liberación de Ca2+ desde los de-pósitos internos dentro del citosol es activado por IP3 y calcio citosólico, talcomo un proceso autocatalítico de IP3 sensible al CIRC es el centro del mecan-ismo oscilatorio. Oscilaciones de Ca2+ en este modelo básico no requieren unavariación periódica de IP3, congruente con las observaciones que muestran laocurrencia de picos repetitivos de Ca2+ en presencia de un nivel constante deIP3: No osbtante que la CIRC es el mecanismo oscilatorio primario, la con-centración de IP3 probablemente evoluciona de forma no monótona durante el
2Ca2+-induced Ca2+-release.
68

tiempo. IP3 es sintetizado por la fosfolipasa C(PLC) en respuesta a la estimu-lación externa y metabolizado en IP2 por una 5-fosfatasa y en IP4 por 3-kinasa.Una variación oscilatoria de IP3 puede resultar de controlar cualquiera de esas3 enzimas por Ca2+:En apoyo a tal posibilidad, algunos experimentos reportan la actividad de
PLC estimulada por Ca2+, y la actividad de 3-kinasa por Ca2+: Estimulaciónde la actividad PLC por Ca2+ ha sido tomada en cuenta en algunos modelosteóricos, algunos de ellos pueden exhibir un comportamiento oscilatorio tiporáfaga o explosión3 también llamado mixed-mode, así como caos. El nivel deCa2+ citosólico regresa en ambos casos a su valor basal entre picos sucesivosde Ca2+: Tal patrón temporal no se asemeja al comportamiento visto en hepa-tocitos estimulados por distintos exitadores. Con estos exitadores, la dinámicade bursting en hepatocitos cambia de una fase silenciosa a una fase activa conpequeñas amplitudes en las oscilaciones de Ca2+ alrededor de un nivel elevadode Ca2+: Otro tipo de oscilaciones complejas puede obtenerse en simulacionesnuméricas al extender el modelo basado en CIRC tomando en cuenta la estim-ulación de la actividad de IP3 Kinasa debido al Ca2+:Un nuevo modelo es presentado y se investiga la ocurrencia de oscilaciones
complejas en este modelo extendido el cual incorpora el bombeo de Ca2+; suintercambio con el medio externo, así como la entrada estimulo-activación deCa2+:En el siguiente esquema muestra los elementos involucrados en el modelo
4.2.2 Modelo matemático
Houart, Dupont y Goldbeter [16] caracterizan la dinámica de las oscilacionesde Ca2+ por medio de un modelo que combina el mecanismo CIRC al nivel de
3Este comportamiento es descrito por medio del término bursting el cual utilizaremosevitando su traducción literal.
69

receptores de IP3 y la degradación de IP3 por Ca2+ estimulado. Con él se in-vestiga las condiciones en las cuales el fenómeno oscilatorio complejo ocurre y secaracterizan ámpliamente los distintos comportamientos dinámicos que puedenobtenerse, es decir, oscilaciones periódicas simples, los ciclos límites, oscilacionescuasiperiódicas, el fenómeno de bursting y el caos determinístico. Además seinvestiga la relación entre el nivel de estimulación y la frecuencia de las oscila-ciones de Ca2+ en el caso del comportamiento periódico para determinar si elmodelo puede aumentar el incremento de la frecuencia de oscilaciones de Ca2+
con el grado de estimulación.El modelo que se propone contiene tres variables que son las concentraciones
libres de Ca2+ en:
� Citosol (Z)
� Interna (Y )
� IP3 (A)
La evolución en el tiempo de estas tres variables está gobernada por elsiguiente sistema de ecuaciones diferenciales ordinarias
dZ
dt= Vin � V2 + V3 +KfY � kZ
dY
dt= V2 � V3 �KfY (4.1)
dA
dt= �V4 � V5 � "A
donde
Vin = V0 + V1�
V2 = VM2Z2
K22 + Z
2
V3 = VM3Zm
KmZ + Z
m
Y 2
K2Y + Y
2
A4
K4A +A
4
V5 = VM5Ap
Kp5 +A
p
Zn
Knd + Z
n
V0 es la constante de entrada de Ca2+ desde el medio extracelular y V1 es la tasamáxima estímulo-inducida de Ca2+ desde el medio extracelular. El parámetro� re�eja el grado de estimulación de la célula, el cual varía desde 0 hasta 1. Lastasas V2 y V3 son, respectivamente, la de bombeo de Ca2+ citosólico al interiory la de liberación de Ca2+ desde este depósito interno al cytosol en un procesoactivado por calcio citosólico (CIRC), VM2 y VM3 denotan los valores máximosde dichas tasas. Los parámetros K2; KY ; KZ ; KA son constantes que delimitanel bombeo, liberación y activación por Ca2+ y por IP3. kf es una tasa constanteque mide el �ltrado de Y en Z; k se re�ere al transporte de Ca2+citosólico hacia
70

el medio extracelular. V4 es la tasa máxima de la síntesis estímulo-inducida deIP3. V5 es la tasa de fosforilación de IP3 por la 3-kinasa y es caracterizada porun valor máximo VM5 y una constante de saturación media K5
4.3 Bursting, caos y cuasiperiodicidad
Oscilaciones complejas de Ca2+ son observadas usualmente en respuesta a la es-timulación externa, oscilaciones complejas hans ido reportadas en experimentosrealizados con hepatocitos como respuesta a una variedad de exitadores.Una inspección detallada del comportamiento dinámico se realiza en [16] y
se descubren las regiones de las oscilaciones complejas de Ca2+; que incluyen(a)bursting, (b)caos y (c)cuasiperiodicidad. Tres conjuntos de parámetros cor-responden a estos comportamientos oscilatorios complejos y se enlistan a con-tinuación
Para oscilaciones del tipo bursting, picos de amplitud grande de Ca2+ son segui-dos por pequeñas variaciones de Ca2+ alrededor de cierto nivel. Oscilacionesaperiódicas, caóticas son usualmente de amplitud reducida y nunca experimen-tan largos trayectos en el espacio fase comparado con el caso de bursting. Untípico atractor corresponde a la dinámica del caso caótico. Oscilaciones cuasiper-iódicas están caracterizadas por la existencia de múltiples frecuencias y han sidoreportadas escasamente en sistemas bioquímicos.El comportamiento dinámico de los distintos tipos de oscilaciones se muestra
71

en la siguiente �gura
De acuerdo a los experimentos realizados la variable medible es la concentraciónde Ca2+ en citosol, por tanto este estado será de importancia en nuestro análisis.
4.4 Análisis de la dinámica libre del sistema deCa2+
Para realizar el análisis de la dinámica libre del sistema, comportamiento alazo-abierto, nos hemos enfocado en el caso caótico, tomando el valor de losparámetros correspondientes a este comportamiento. Tomemos el sistema 4.1 y
72

reescribase de la forma�x = f(x)
dx1dt
= Vin � V2 + V3 +Kfx2 � kx1dx2dt
= V2 � V3 �Kfx2dx3dt
= �V4 � V5 � "x3
(4.2)
La solución del sistema lo realizaremos utilizando cálculo númerico, por mediodel método de Runge-Kutta de cuarto y quinto orden4 . La solución x (t) ='�t; t0; x
0�con condiciones iniciales x0 (0) = (0:5; 0:5; 0:5) durante un periodo
de tiempo t 2 [0; 20] fue las siguiente5
Los estados de equilibrio x del sistema son aquellos estados para los cualesf (t; x) = 0. Los puntos de equilibrio del sistema 4.2 se obtienen resolviendo elsistema de ecuaciones algebraicas siguiente
Vin � V2 + V3 +Kfx2 � kx1 = 0V2 � V3 �Kfx2 = 0�V4 � V5 � "x3 = 0
(4.3)
El estado de equilibrio6 resultante es x = (0:33; 0:7812; 0:1365).Por otro lado, consideremos la linealización alrededor del punto de equilibrio
Dxf (t; ex (t)) = � @fi@xj
(t; ex (t))�n�n
4ode45 es una de las funciones que MatLab proporciona para la solución numérica deecuaciones diferenciales ordinarias. ode45 usa métodos de integración Runge-Kutta-Fehlbergcon tamaño de paso automático.
5El código correspondiente al sistema 4.2 puede consultarse en el apéndice sistema deecuaciones diferenciales.
6MatLab utiliza fsolve para resolver sistemas de ecuaciones no lineales de varias variables.fsolve intenta resolver ecuaciones de la forma F (X) = 0 donde F y X son vectores o matrices.Adicionalmente fsolve devuelve el valor de la matriz Jacobiana de la función vectorial F
evaluada en ex:El código correspondiente al sistema 4.3 puede consultarse en el apéndice sistema de ecua-
ciones algebráico.
73

es decir
Dxf (t; x) =
8>>>>><>>>>>:
@f1@x1
(t; x)@f1@x2
(t; x)@f1@x3
(t; x)
@f2@x1
(t; x)@f2@x2
(t; x)@f2@x3
(t; x)
@f3@x1
(t; x)@f3@x2
(t; x)@f3@x3
(t; x)
9>>>>>=>>>>>;de donde se sigue
Dxf (t; x) =
8<: 9:1341 2:5510 30:8906�19:1341 �2:5510 �30:8906�2:1019 0 �13:9005
9=;Los eigenvalores correspondientes de Dxf (t; x) permiten determinar la estabil-idad local del sistema, estos son
�1 = 1:6333 + 5:5530i
�2 = 1:6333� 5:5530i�3 = �10:584
Debido a que Re (�1;2) > 0 el sistema es localmente inestable.
4.5 Análisis de bifurcación
Tres parámetros son de interés para el desarrollo del sistema, � que re�eja elgrado de estimulación de la célula, el cual varía desde 0 hasta 1, kf que esla tasa constante que mide el �ltrado de Ca2+ interno en citosol y k que sere�ere al transporte de Ca2+citosólico hacia el medio extracelular. El cambioen los valores de estos parámetros permite identi�car el grado de sensibilidaddel sistema. Nuestro objetivo es identi�car si tales variaciones generan nuevospuntos de equilibrio en el sistema lo cuales di�eran signi�cativamente del puntode equilibrio x = (0:33; 0:7812; 0:1365).
4.5.1 Variaciones paramétricas
Variación de �
El parámetro � toma valores dentro del intervalo [0; 1]. Utilizaremos un �i difer-ente cada vez y resolveremos el sistema algebraico 4.3 con condiciones iniciales
(0:5; 0:5; 0:5; ) ; así se obtendrán distintos xi =�x0
1; x0
2; x0
3
�: Cada �i puede ser
tomado según la expresión recursiva �i+1 = �i + ��, donde �� puede sertomado tan pequeño como se desee:El valor inicial del parámetro es � = 0:65; después de recorrer � por todo
el intervalo con �� = 0:01 obtenemos las siguientes variantes en los puntos de
74

equilibrio
Observemos que la variable x2 presenta cambios respecto al valor 0.7812 corre-spondiente al punto de equilibirio x = (0:33; 0:7812; 0:1365): Así, puede decirsede manera preliminar que x2 es sensible a las variaciones del parámetro �:
Variaciones de kf
El valor inicial del parámetro kf = 1:Consideraremos distintos valores dentrodel intervalo [0:5; 1:5], procediendo de manera similar obtenemos
Se puede observar que las variaciones no son signi�cativas respecto al punto deequilibrio original, por lo tanto el sistema 4.2 no es sensible al parámetro kf
Variaciones de k
Como último parámetro a analizar es k cuyo valor inicial es 10 y varía den-tro del intervalo [5; 10], resolviendo el sistema 4.2 con las condiciones iniciales
75

planteadas y para distintos ki tenemos
La variable x2 es ligeramente sensible respecto a las variaciones del parámetrok:Como conclusión podemos mencionar que el sistema es un tanto sensible a
las variaciones de los parámetros � y k pero sólo para la variable x2 que es laconcentración interna de Ca2+; no obstante el grado de sensibilidad no quedabien establecido.Procederemos a continuación a analizar el sistema de oscilaciones de Ca2+
incluyendo dos nuevas ecuaciones diferenciales de la forma
�x = � (x� xr)
una para cada parámetro que hemos considerado que determinan un grado desensibilidad en el sistema 4.2 y revisaremos los cambios cualitativos de las solu-ciones y espacio fase resultante.
4.5.2 Sistema parametrizado
Suponemos que el sistema 4.2 es sensible a las variaciones de los parámetros � yk; por lo tanto es importante conocer la dinámica del sistema aumentando dosnuevas ecuaciones diferenciales correspondientes a cada uno de los parámetros.Tenemos entonces las ecuaciones
d�
dt= �� (� � �r) (4.4)
dk
dt= � (k � kr) (4.5)
que representan la dinámica de � y k:Procederemos a resolver el nuevo sistema, agregando primero la ecuación
4.4 al sistema 4.2, con lo que tenemos el sistema de 4 ecuaciones diferenciales
76

ordinarias siguiente
dx1dt
= Vin � V2 + V3 +Kfx2 � kx1 (4.6)
dx2dt
= V2 � V3 �Kfx2
dx3dt
= �V4 � V5 � "x3d�
dt= �� (� � �r)
Resolvamos este sistema usando las condiciones inciales x0 = (0:5; 0:5; 0:5; 1) :La solución del sistema, el pláno fase x1�x2 y la dinámica de � son las siguientes
El punto de equilibrio del sistema 4.6 es x = (0:3200; 1:0352; 0:1271; 0:60) y sulinealización correspondiente es
Dxf (t; x)
8>><>>:8:5213 1:6632 38:6317 2:0�18:5213 1:6632 �38:6317 0�1:827 0 �13:8312 3:00 0 0 �0:5
9>>=>>;
77

Los eigenvalores de Dxf (t; x) son
�1 = �10:0247�2 = 1:5258 + 4:5409i
�3 = 1:5258� 4:5409i�4 = �0:50
como Re (�2;3) > 0 el sistema es localmente inestable.Ahora, agregemos la ecuación 4.5 al sistema 4.2
dx1dt
= Vin � V2 + V3 +Kfx2 � kx1 (4.7)
dx2dt
= V2 � V3 �Kfx2
dx3dt
= �V4 � V5 � "x3dk
dt= � (k � kr)
y al resolverlo con las condiciones inciales x0 = (0:5; 0:5; 0:5; 15) tenemos
El punto de equilibrio del sistema 4.7 es
x = (0:3300; 0:7812; 0:1365; 10:0)
78

con linealización
Dxf (t; x) =
8>><>>:9:1341 2:5510 30:8906 �0:33�19:1341 �2:5510 �30:8906 0�2:1019 0 �13:9005 0
0 0 0 �0:5
9>>=>>;y eigenvalores
�1 = 1:6333 + 5:5530i�2 = 1:6333� 5:5530i�3 = �10:5841�4 = �0:5
Dado Re (�1;2) > 0 el sistema es localmente inestableFinalmente agregaremos las ecuaciones 4.4 y 4.5 al sistema 4.2, resolviendo
con condiciones iniciales x0 = (0:5; 0:5; 0; 1; 15) nos da
El punto de equilibrio obtenido es
x = (0:3200; 1:0352; 0:1271; 0:60; 10:0)
Al linealizar el sistema alrededor de x tenemos
Dxf (t; x) =
8>>>><>>>>:8:5213 1:6632 38:6317 2:0 �0:32�18:5213 �1:6632 �38:6317 0 0�1:8270 0 �13:8312 3:0 0
0 0 0 �0:5 00 0 0 0 �0:5
9>>>>=>>>>;Los eigenvalores correspondientes son
�1 = �10:0247�2 = 1:5258 + 4:5409i�3 = 1:5258� 4:5409i�4 = �0:50�5 = �0:50
79

dado que Re (�2;4) > 0 el sistema es localmente inestable.Despues del análisis de bifurcación podemos concluir que el sistema aunque
es sensible de cierta forma a la variación de los parámetros � y k, éstos norepresentan un factor trascendente en la dinámica del sistema dado que antetales variaciones la dinámica no se ve considerablemente alterada.
4.6 Pruebas de controlabilidad y observabilidad
Como se mencionó en el capítulo 1, las pruebas de controlabilidad y observabil-idad permiten conocer si el sistema puede llevarse a cierta dinámica deseada yademás, si esto es posible, por medio de la entrada de control y su salidas.Para realizar lo anterior escribamos el sistema 4.2 de la forma
�x (t) = Ax (t) +Bu (t) ; t 2 Ry (t) = Cx (t) +Du (t) :
donde A 2 Rn�n; B 2 Rn�p; C 2 Rq�n; D 2 Rq�p:Considerando esta linealización al rededor del punto de equilibrio x = (0:33; 0:7812; 0:1365)
y la entrada de control entrada de control u = Vin; la salida medible será y = x1con lo que se obtiene
�x (t) =
24 9:1341 2:5510 30:8906�19:1341 �2:5510 �30:8906�2:1019 0 �13:9005
3524 x1x2x3
35+24 100
35uy (t) =
�1 0 0
� 24 x1x2x3
35La matriz de controlabilidad
C =�B AB A2B : : : An�1B
�; C 2 Rn�np;
tiene la forma
C =
24 1 9:1341 67:30 19:134 190:90 �2:101 10
35cuyo rango � (C) = 3 el cual es el mismo que la dimensión del sistema, por lotanto el sistema es controlable localmente.La matriz de observabilidad
O =
266664CCACA2
: : :CAn�1
377775 ; O 2 Rnq�n;
80

nos queda
O =
24 1 0 09:1341 2:5510 30:890667:3139 16:7935 �266:0389
35la cual es de rango � (O) = 3, con lo que el sistema es observable de maneralocal.Podemos decir por lo tanto que el sistema no obstante de ser localmente
inestable, puede ser controlable y estabilizable localmente alrededor del puntode equilibrio.
81

Capítulo 5
Control del sistema deoscilaciones de Ca2+
5.1 Introducción
Los objetivos del control en los procesos celulares pueden ser la exitación osupresión de oscilaciones, entrenamiento y sincronización o transiciones de unestado caótico a oscilaciones periódicas y viceversa. Una propiedad especial delion de Ca2+ es la �exibilidad de funciones que desempeña, tal es que para con-centraciones elevadas por un periodo largo tiempo podría resultar letal para lacélula[6] debido a la formación de sales insolubles de Ca2+. Este efecto dañinopuede evitarse por medio de un comportamiento oscilatorio que permita a lacélula usar al Ca2+ como un mensajero intracelular y evitar estas concentra-ciones altas que podrían aniquilarla. Varios procesos bioquímicos son reguladospor la concentración de calcio libre en la célula, por lo que los niveles de Ca2+
deben estar estrictamente regulados bajo circunstancias normales y ante circun-stancias impredecibles. Una interrupción en el ritmos de los procesos celularesque traspacen la frontera de un ritmo normal pueden traer consecuencias im-portantes. Por tanto es necesario desarrollar una ley e�ciente de control para ladinámica no lineal en la señalización del calcio intracelular.Controlar este tipo de sistemas que conllevan varios parámetros respresenta
un reto a pesar de que el sistema esté descrito por ecuaciones diferencialesordinarias no lineales. Puebla [28] desarrolla una ley de control retroalimentadopara modi�car el comportamiento de las oscilaciones intracelulares de calcio ypropone una estructura para la síntesis de controladores retroalimentados lacual toma en cuenta la naturaleza no lineal del fenómeno.Una di�cultad en los modelos de señalización de calcio es la incertidumbre
de los valores de las tasas constantes, parámetros cinéticos y el coe�ciente dedifusión. No obstante, la teoría del control tiene un fundamento matemáticosólido y varios puntos importantes como robustez en modelos imperfectos yla estimación de parámetros inciertos son manejados adecuadamente. Desde
82

el punto de vista del control, se requiere identi�car las variables medibles delsistema y las variables manipulables. Primeramente la concentración de calciocitosólico libre debe ser considerado como una variable dinámica medible, debidoa que es la variable más comunmente cuanti�cable, posteriormente se consideraque una entrada de control externa provoca un in�ujo de Ca2+ el cual al provenirdel exterior celular se sabe que afecta la frecuencia en las oscilaciones de Ca2+.La razón principal de contruir una ley de control es la de regular las oscila-
ciones caóticas de calcio por medio de la manipulación de Ca2+: Primeramentese diseñará un esquema de control de modo deslizante de alto orden[3] y sudesempeño será evaluado en los siguientes objetivos de control:
1. Regulación o supresión de las oscilaciones periódicas de Ca2+;
2. Trasladar un comportamiento periódico a una oscilación de Ca2+ difer-ente.,
3. Sincronización de dos osciladores caóticos de Ca2+:
Para poner en marcha el esquema de control se han hecho las siguientessuposiciones:
� Es posible medir la concentración de calcio en citosol x1:
� Las tasas constantes y los valores cinéticos presentan incertidumbres o sondesconocidos
La acción de control u es introducida en la variable x1 en lugar de Vin:El incremento/decremento de la suma V0 + V1� conduce a la modi�cación delcomportamiento oscilatorio. En particular un incremento en � debido a laestimulación por una seña externa o un incremento en V0 origina un incrementoen Ca2+ extracelular lo cual puede disparar oscilaciones. La importancia de laregulación de las oscilaciones de Ca2+ radica en el papel fundamental del ionde Ca2+ en el control de varias funciones celulares.Existen hasta el momento contribuciones importantes que han mejorado la
concepción de las funciones de regulación en el Ca2+ intracelular, investigacionesde tipo experimental se deben a Berride y Dupond, en cuanto al modelado aGoldbeter, Sneyd, Keizer y contribuciones de control a Marhl [20], Goldbeter yPuebla .
5.2 Diseño de una ley de control retroalimen-tado no lineal
Esquemas de control de modo deslizante han mostrado varias desventajas altratar incertidumbre y su velocidad de convergencia sobre otras técnicas comoaquellas que se basan en la teoría de Lyapunov, linealización retroalimentaday linealización extendida[3]. Por otra parte, controladores de modo deslizantetienen la principal desventaja en que la trayectoria a lazo cerrado de la solución
83

diseñada no es robusta respecto a los disturbios sobre un intervalo de tiempoprecedente al movimiento deslizante. Los controladores deslizantes clásicos sonrobustos en el caso de tener pequeños disturbios, con esto el controlador diseñadoasegura ser óptimo únicamente después de entrar al modo deslizante. Para evitarlas deventajas anteriores se han propuesto técnicas de modo deslizante de altoorden [31], [29], [17].El esquema de control que proponemos considera una potencia fraccional del
valor absoluto del error de segumiento, unido a la función signo, esta estruccturaprovee varias ventajas como la simpli�cación de la ley de control, alta precisióny prevención del chattering1 . A continuación desarrollaremos una estrategia decontrol no lineal por retroalimentación para controlar y sincronizar el modelode oscilaciones de Ca2+:Para diseñar el controlador seleccionamos la concentración de Ca2+ libre x1
como la variable dinámica medible, debido a que es un cantidad frecuentementeutilizada2 . Por otra parte, consideraremos un in�ujo externo de Ca2+ comoentrada de control. In�ujos de Ca2+ desde el exterior celular, se sabe, afecta lafrecuencia de las oscilaciones de Ca2+; así u = Vin:Entonces, la primera ecuación del sistema 4.2 se reescribe
dx1dt
= u� V2 + V3 +Kfx2 � kx1 (5.1)
La entrada de control Vin es una variable importante para la manipulaciónexperimental.Se sigue entonces que
y = h (x) = x1 (5.2)
es la variable medible del sistema.Dado que existen importantes incertidumbres en las tasas constantes y en
los valores cinéticos, las ecuaciónes anteriores pueden ser escritas como
dx1dt
= f (x) + g (x)u (5.3)
f (x) = V2 + V3 +Kfx2 � kx1La función f (x) contiene incertidumbres relativas a los parámetros cinéticos.Porotro lado, consideramos para este caso g (x) = 1: En una situación extrema seasumiría que la función f (x) se desconoce. La salida de los sistemas dinámicospuede ser obtenida de las ecuaciones 5.1 y 5.2:
dy
dt=@h
dx(f (x) + g (x)u) (5.4)
1El Chattering consiste en el error debido a las variaciones obtenidas por el ajuste. Veáse[31], pp. 282-283.
2La cual puede ser medida por medio de coloraciones �uorescentes.
84

Sea yref = x1;ref una trayectoria deseada y�yref la variable respecto al tiempo
de la trayectoria deseada. Una trayectoria deslizante propuesta es
�yref = �1 (y � yref ) + �2
tZ0
nsign (y � yref ) jy � yref j1=p
od� (5.5)
donde �1; �2 son parámetros del control.De�nimos e = y � yref como el error de la trayectoria, con lo que tenemos
que la dinámica del este error está gobernada por
�e =
@h
dx
0@f (x) + u� �1 (y � yref )� �2 tZ0
nsign (y � yref ) jy � yref j1=p
od�
1A(5.6)
entonces una ley de control ideal esta dada por
u = ��@h
dxg (x)
��1�@h
dxf (x) + !
��1(5.7)
! = ��1 (y � yref )� �2tZ0
nsign (y � yref ) jy � yref j1=p
od�
La ley de control anterior conduce a e ! 0, cuando t ! 1; es decir, quey ! yref .La síntesis de una ley de control ideal requiere de precisar el término f (x)
para llevarse a cabo, sin embargo es incierta. Utilizando las propiedades de lacontribución que proporciona la integral de alto orden en un modo deslizante,el conocimiento del término no lineal f (x) puede ser descartado, tal que uncontrolador libre puede ser propuesto como
u = ��@h
dxg (x)
��1(!) (5.8)
! = ��1 (y � yref )� �2tZ0
nsign (y � yref ) jy � yref j1=p
od�
En resumen, la ley de control está compuesta por un modelo deslizante dealto orden y sólo utiliza las medidas de Ca2+:
5.3 Aplicación de la ley de control
Por medio de simulaciones numéricas mostraremos el desempeño de la ley decontrol propuesta. Los parámetros del modelo �1; �2 dependerán de los objetivosde control, el valor para el parámetro p es 2 y la acción de control comienza enel tiempo t = 10 en todos los casos.
85

5.3.1 Regulación de Ca2+ intracelular
Se desea controlar el comportamiento del sistema a un valor de referenciaCa2+r = 0:35: En este caso se han tomado los valores de los parámetros �1 = 25y �2 = 25 con lo que se obtuvieron los siguientes resultados
Notemos que el controlador propuesto mantiene la concentraciaón de Ca2+
alrededor de una pequeña vecindad del valor de referencia por medio de lasoscilaciones complejas del in�ujo de Ca2+: Al incrementar los parámetros decontrol podemos suprimir por completo la dinámica no lineal de Ca2+ intracelu-lar con una amplitud grande en la oscilación del in�ujo de Ca2+: Es interesantehacer notar que las oscilaciones complejas de la señal de Ca2+ conducen a unasalida estacionaria de la concentración de Ca2+ intracelular.Podemos regular la variable x1 no obstante los otros dos estados podrían
no regularse bajo la ley de control, las simulaciones realizadas se muestran acontinuación
Los estados x2; x3 también se regularon, por lo tanto el sistema es estabilizable.
5.3.2 Seguimiento de Ca2+ intracelular
En este caso se desea controlar el comportamiento del sistema hacia una señalsinusoidal Ca2+r = 0:35+ sin(0:35t): Los parámetros de control están dados por
86

�1 = 25 y �2 = 25: Los resultados de la simulación son los siguientes
Los estados x2; x3 siguieron la trayectoria de referencia
De lo anterior podemos observar que las entradas de control constituyen unin�ujo periódico de Ca2+: Tales resultados indican que la señal de oscilacionesde Ca2+ motivada por un estímulo externo requiere la variación periódica delin�ujo de Ca2+: Esta a�rmación puede estar relacionada con las observacionesrealizadas en numerosos estudios experimentales y teóricos que conducen a unsistema oscilatorio por medio de una entrada periódica produciendo un compor-tamiento periódico simple o complejo.[20], [30].
5.3.3 Sincronización de calcio Ca2+
Consideremos ahora la sincronización de dos modelos de calcio intracelularCa2+.La sincronización de Ca2+ intracelular se sabe que ocurre en un número
grande de células, las cuales frecuentemente están asociados con la dispersión deondas dentro del medio intracelular [27], [20]. El primer oscilador es consideradoel subsistema maestro y el segundo será el subsistema esclavo. El objetivode sincronización es que el oscilador esclavo siga la dinámica descrita por el
87

oscilador maestro. Los parámetros de control están dados por �1 = 25 y �2 = 25:Los resultados de la simulación numérica son los siguientes
La sincronización se obtiene manipulando el in�ujo oscilatorio de Ca2+ que esmuy parecido a la oscilación básica de Ca2+: La señal utilizada puede consid-erarse como una señal adyacente, la cual estimula la oscilación sincronizada, esdecir, estimula la célula para oscilar con el mismo patrón temporal que su vecino[20], [30].
5.3.4 Conclusiones
Hemos mostrado que el desempeño del esquema de control propuesto es satis-factorio para las tres tareas propuestas y las venjas de utilizar este modelo decontrol deslizante de alto orden en un sistema biológico son:
� Es robusto contra las incertidumbres del modelo,
� Es sencillo en su diseño.
88

Capítulo 6
Observación del sistema deoscilaciones de Ca2+
6.1 Enfoque algebráico diferencial del sistema
Retomemos el sistema de oscilaciones de Ca2+
dZ
dt= Vin � V2 + V3 +KfY � kZ
dY
dt= V2 � V3 �KfY
dA
dt= �V4 � V5 � "A
donde
Vin = V0 + V1�
V2 = VM2Z2
K22 + Z2
V3 = VM3Zm
KmZ + Z
m
Y 2
K2Y + Y
2
A4
K4A +A
4
V5 = VM5Ap
Kp5 +A
p
Zn
Knd + Z
n
Considemos la entrada de control u = Vin y la salida medible y = Z, por tanto
�Z = u� V2 + V3 +KfY � kZ�Y = V2 � V3 �KfY�A = �V4 � V5 � "A�y =
�Z
89

Deseamos expresar�Z;
�Y ;
�A como funciones de y y/o un conjunto �nito de
sus derivadas. Entonces es claro ver que
�Z = u� V2 + V3 +KfY � kZ
equivale a escribir�y = u� V2 + V3 +KfY � ky (6.1)
de donde
�y = u�
�VM2
y2
K22 + y2
�+
�VM3
ym
KmZ + y
m
Y 2
K2Y + Y
2
A4
K4A +A
4
�+ kfY � ky
Además�Y y
�A pueden expresarse como
�Y = V2 � V3 �KfY
=
�VM2
y2
K22 + y2
���VM3
ym
KmZ + y
m
Y 2
K2Y + Y
2
A4
K4A +A
4
�� kfY
y
�A = �V4 � V5 � "A
= �V4 ��VM5
Ap
Kp5 +A
p
yn
Knd + y
n
�� "A
Entonces nos queda que
V2 = VM2y2
K22 + y2
= f (y)
V3 = VM3ym
KmZ + y
m
Y 2
K2Y + Y
2
A4
K4A +A
4
= f1 (y) g (Y )h (A)
V5 = VM5Ap
Kp5 +A
p
yn
Knd + y
n
= f2 (y)h1 (A)
Reescribiendo lo anterior llegamos a
�y = u� f (y) + f1 (y) g (Y )h (A) + kfY � ky (6.2)
�Y = f (y)� f1 (y) g (Y )h (A)� kfY (6.3)
�A = �V4 + f2 (y)h1 (A) (6.4)
Ahora, despejando f1 (y) g (Y )h (A) de 6.2 tenemos que
�y � u+ f (y)� kfY + ky = f1 (y) g (Y )h (A)
90

y al ser sustituido en 6.3
�Y = f (y)�
h �y � u+ f (y)� kfY + ky
i� kfY
= u� �y � ky
o bien
Y =
Zu� �
y � ky
Existen dos estados del sistema que pueden ser expresados en términos dey o un conjunto �nito de sus derivadas, los cuales son Z y Y; no así para elestado A. Entonces desde la perspectiva algebráico diferencial se dice que elsistema de oscilaciones de Ca2+ es un sistema Liouvilliano, y existe un defectoalgebráico uno correspondiente a la tercera variable. El sistema es observablepara los dos primeros estados, no obstante, el tercer estado del sistema no esalgebraicamente observable. Sin embargo, se mostró que hay observación local ypor las condiciones particulares de las trayectorias, el proceso de sincronizaciónpor medio de observadores puede llevarse acabo.
6.2 Sincronización usando observadores
Metodologías utilizadas para sincronizar usando esquemas de control deslizantede alto orden se muestran en [1], [2], [37]. En lo que sigue realizaremos la sin-cronización de dos sistemas de oscilaciones de Ca2+ con la misma estructurapero que se desarrollan bajo distintas condiciones iniciales. Usaremos para estodos distintas metodologías, una a través del modo deslizante de alto orden y laotra usando un observador del tipo Luenberger, y compararemos el desempeñode ambas sincronizaciones.
6.2.1 Sincronización usando un esquema de modo deslizante
Para el esquema de control desarrollado anterirormente y considerando que elsistema de oscilaciones de Ca2+ es un sistema Luivilliano de�nimos
u1 = kp1 jy � yref j1=p sign (y � yref )
u2 = kp2 jy � yref j1=p sign (y � yref )
u3 = kp3 jy � yref j1=p sign (y � yref )
con kp1 = 50; kp2 = �500; kp3 = �1; p = 3:Tomando las condiciones inciales x0 = (0:5; 0:5; 0:5; 0:5; 0; 0) e iniciando la
acción de control al tiempo t = 10 la simulación numérica tiene los siguientes
91

resultados
El sistema esclavo sigue la dinámica del sistema maestro una vez que inicia laacción de control, por lo tanto el desempeño del esquema de control propuestoes adecuado.
92

6.2.2 Sincronización usando un esquema Luenberger
Un esquema de control de tipo Luenberger con valores en las ganancias kp1 = 50;kp2 = �500; usando sólo el error e = y�yref en lugar de las acciones de controlu1; u2; u3; y resuelto para las condiciones iniciales x0 = (0:5; 0:5; 0:5; 0:5; 0; 0)genera
La sincronización usando este esquema de control no puede llevarse acabo.
93

Notemos que valores adecuados en las ganancias kpi conducirán a un mejordesempleño del esquema de control utilizado. Hasta el momento no existe unametodología que determine la forma de encontrar tales valores en las gananciasy con el cual se asegure el desempeño óptimo de algún cierto esquema de control.Así, la sincronización, por medio de observadores que se propone tiene un
mejor desempeño que el modelo de tipo Luenberger para los valores de lasganancias propuestos, sin que ello signi�que que no existan valores adecuadospara este esquema de control o que sean difíciles de encontrar.
94

Bibliografía
[1] Agiza H., Yassen M., �Synchronization of Rossler and Chen chaotic dynam-ical systems using active control�, Physics Letters A, 2001, pp. 191-197.
[2] Aguilar R., Martínez R., �Discrete algebraic estimator design for non-linearLiouvillian systems with sampled output: Application to a class of stirredbioreactor�, Chemical Engineering Journal, CEJ 4756, 2006, pp. 1-6.
[3] Aguilar R., Alvarez, J., "Sliding mode control scheme for a class of contin-uous chemical reactors", IEEE procedings of Control Theory Applied, vol.149, pp. 263-268
[4] Borghans, J., Dupont, G., Goldbeter, A., "Complex intracellular calciumoscillations. A theoretical explortation of possible mechanisms", BiophysicalChemistry, vol. 66 pp 25-41, 1997.
[5] Brauer F., Nohel J., "The qualitative theory of ordinary di¤erential equa-tions. An introduction", Dover Publications, New York, 1989.
[6] Berridge M.J., Bootman M.D., Lipp P., "Calcium -a life and death signal",Nature 395:645, 1998.
[7] Diop S. �The Algebraic theory of nonlinear observability revisited�, Pro-ceedings of the 40th IEEE, Conference on decision an control, 2001, pp.2550-2555.
[8] Goldbeter, A. "Biochemical Oscillations and Cellular Rhythms", Cam-bridge University Press, Cambridge, UK.
[9] Huart, G., Dupont, G., Goldbeter, A., "Bursting, Chaos and BirhythmicityOriginating from self-modulation of the Inositol 1,4,5-trisphosphate signalin a model for intracellular Ca2+ oscillations", Bulletin of MathematicalBiology, 1999, vol. 61, 509-530.
[10] Fliess, M. �Generalized controller canonical forms for linear an nonlineardynamics�, IEEE Transactions on automatic control, vol. 35, 1990, pp.994-1001.
95

[11] Fliess M., Levine J., Martin Ph., Rouchon P., �Flatness and defect onnonlinear systems: Introductory theory and examples�, CAS Internal J.,1994.
[12] Friedland B., "Control system design. An introduction to estate-space meth-ods", Mc.Graw-Hill, 1a. edición, U.S.A., 1987.
[13] Fradkov A. L., Pogromsky A. Yu., "Introduction to control of oscillationsand chaos", World Scienti�c Publishing Co., 1998.
[14] Isidori A., �Nonlinear control systems�, 3a. ed., Springer-Verlag, 1996.
[15] Hinrichsen, D., Pritchard, A�"Mathematical System Theory I. Modeling,State Space Analysis, Stability and Robustness", Springer-Verlag, 2005.
[16] Hourat G, Dupont G, Goldbeter A, "Bursting, chaos and birhythmicityoriginating from a self-modulation of the inositol 1,4,5-trisphosphate signalin a model for intracelular Ca2+ oscillations", Bull Math Biol 61:507, 1999.
[17] Levant, A., "Universal single-input-single-output sliding mode controllerswith �nite-time convergence", IEEE Automatic Control, vol. 46, pp. 1447-1451.
[18] Martin Ph., Rouchon P., �Systémes plats: plani�cation et suivi de trajecto-ries�, École des mines de Paris, Centre Automatique et Systémes, JournéesX-UPS, 1999.
[19] Martin Ph., Murray R., Rouchon P., �Flat systems, equivalence and trayec-tory generation�, École des mines de Paris, Centre Automatique et Sys-témes, Technical report, 2003.
[20] Marhl, M., Schuster S., "Under what conditions signal transduction path-ways are highly �exible in response to external forcing?, a case study oncalcium oscillations", Journal of Theory Biology, vol. 224, pp. 491.
[21] Martinez R., De León Morales J., �Observers for a multi-input multi-outputbilinear system class: A di¤erential algebraic approach�, Math. Comput.Modelling, vol. 20, no. 12, 1994, pp125-132.
[22] Martinez R., De León Morales J., �Nonlinear estimators: A di¤ernetialalgebraic approach�, Appl. Math. Lett., vol. 9, no. 4, 1996, pp. 21-25.
[23] Martinez R., Diop S., �Diagnosis of nonlinear systems using an unknown-input observer: an algebraic and di¤erential approach�, IEEE proceedingsControl Thoery Appl., vol. 151, no. 1, 2004, pp. 130-135.
[24] Martínez C., De León Morales J., Martínez R., �Estimation and nonlinearcontrol of a class of continuous stirred tank reactors. A di¤erential algebraicapproach�, Proceedings of the A.C.C., 1997, pp. 3390-3394.
96

[25] Mendoza J., "Observadores de orden reducido para sistemas diferencial-mente no planos y de Liuoville", Tesis de grado para doctor en ciencias,CINVESTAV, I.P.N., México, 2005.
[26] Murray, R., et. al., �Control in an information rich world. Report of thepanel on future directions in control, dynamis, and systems�, Universidadde Maryland, E.U.A., 2002.
[27] Per, M., Marhl, M., "Synchronization of regular and chaotic oscillations:the role of local divergence and the solw passage e¤ect", Int. J. Bif. Chaos,vol. 14, pp. 2735-2751.
[28] Puebla H., �Controlling intracellular calcium oscillations and waves�, Jour-nal of Biological Systems, vol. 13, no. 2, 2005, pp. 173-190.
[29] Scarry, J.C., Ziniber, A., Mills, R.E., Rios-Bolivar, M., Ferrara, A., Giaco-mini, L., "Dynamical adaptive �rst and second order sliding backsteppingcontrol of nonlinear non-triangular uncertain systems", Journal of Dynam-ical Systems Measurement ,.Control Trans. ASME, vol. 122, pp.746-752.
[30] Schuster, S., Marhl, M., Hofer, T., "Modeling of simple and complex cal-cium oscillations: fron single-cell responses to intracellular signaling", Eur.J. Biochem., vol 269, pp. 1333.
[31] Sira-Ramirez, H. "Dynamic second order sliding-mode contrl of the Hover-craft vessel", IEEE transactions on Control Systems Technology, vol. 10,pp. 860-865.
[32] Slotine, J.J., Li, W., "Applied Nonlinaer Control", Prentice Hall, 1991.
[33] Sontag E. D., �Mathematical control theory. Deterministic �nite dimes-tional systems�, Springer-Verlag, New York, 1998.
[34] Trentelman Harry, Stoorvogel Anton, "Control Theory for Linear Sys-tems", Springer Verlag, Londres 2001.
[35] Vincent U.E. , �Synchronization of Rikitake chaotic attractor using activecontrol�, Physics Letters A., 2005, pp. 133-138.
[36] Youming Lei, Wei Xu, Hongchan Zheng, �Synchronization of two chaoticnonlinear gyros using active control�, Physics Letters A, 2005, pp.153-158.
[37] Yan, J.J., Hung M.L., Chiang, T.Y., Yang, Y.S., "Robust synchronizationof chaotic systems via adaptive sliding mode control", Physics Letters A,
97
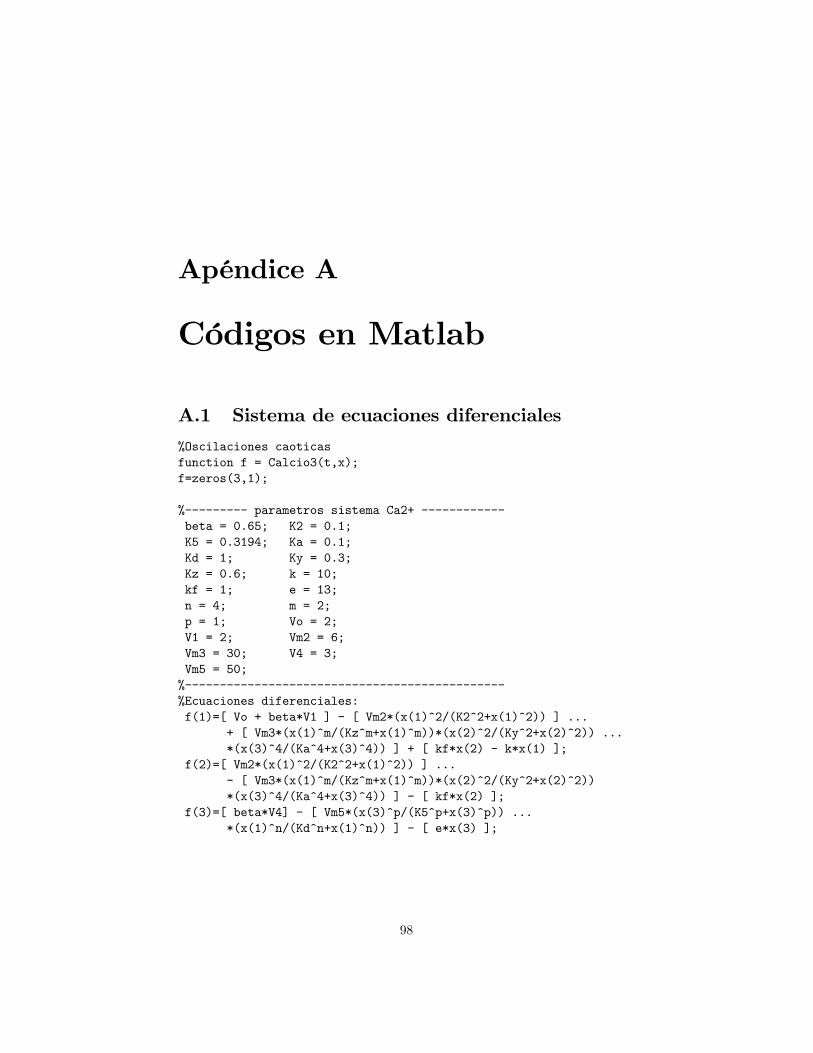
Apéndice A
Códigos en Matlab
A.1 Sistema de ecuaciones diferenciales
%Oscilaciones caoticasfunction f = Calcio3(t,x);f=zeros(3,1);
%--------- parametros sistema Ca2+ ------------beta = 0.65; K2 = 0.1;K5 = 0.3194; Ka = 0.1;Kd = 1; Ky = 0.3;Kz = 0.6; k = 10;kf = 1; e = 13;n = 4; m = 2;p = 1; Vo = 2;V1 = 2; Vm2 = 6;Vm3 = 30; V4 = 3;Vm5 = 50;%----------------------------------------------%Ecuaciones diferenciales:f(1)=[ Vo + beta*V1 ] - [ Vm2*(x(1)^2/(K2^2+x(1)^2)) ] ...
+ [ Vm3*(x(1)^m/(Kz^m+x(1)^m))*(x(2)^2/(Ky^2+x(2)^2)) ...*(x(3)^4/(Ka^4+x(3)^4)) ] + [ kf*x(2) - k*x(1) ];
f(2)=[ Vm2*(x(1)^2/(K2^2+x(1)^2)) ] ...- [ Vm3*(x(1)^m/(Kz^m+x(1)^m))*(x(2)^2/(Ky^2+x(2)^2))*(x(3)^4/(Ka^4+x(3)^4)) ] - [ kf*x(2) ];
f(3)=[ beta*V4] - [ Vm5*(x(3)^p/(K5^p+x(3)^p)) ...*(x(1)^n/(Kd^n+x(1)^n)) ] - [ e*x(3) ];
98

A.2 Sistema de ecuaciones algebraicas
%Oscilaciones caoticas%Ecuaciones algebraicasfunction f = Calcio3a(x);
%--------- parametros sistema Ca2+ ------------beta = 0.65; K2 = 0.1;K5 = 0.3194; Ka = 0.1;Kd = 1; Ky = 0.3;Kz = 0.6; k = 10;kf = 1; e = 13;n = 4; m = 2;p = 1; Vo = 2;V1 = 2; Vm2 = 6;Vm3 = 30; V4 = 3;Vm5 = 50;%---------------------------------------------% Ecuaciones algebraicasf=[...
[Vo + beta*V1 ] - [ Vm2*(x(1)^2/(K2^2+x(1)^2)) ] ...+ [ Vm3*(x(1)^m/(Kz^m+x(1)^m))*(x(2)^2/(Ky^2+x(2)^2)) ...*(x(3)^4/(Ka^4+x(3)^4)) ] + [ kf*x(2) - k*x(1) ];
[Vm2*(x(1)^2/(K2^2+x(1)^2)) ] ...- [ Vm3*(x(1)^m/(Kz^m+x(1)^m))*(x(2)^2/(Ky^2+x(2)^2))...*(x(3)^4/(Ka^4+x(3)^4)) ] - [ kf*x(2) ];
[beta*V4] - [ Vm5*(x(3)^p/(K5^p+x(3)^p))...*(x(1)^n/(Kd^n+x(1)^n)) ] - [ e*x(3) ] ...
]
A.3 Análisis de bifurcación
A.3.1 Variación de parámetros �; k; kffunction R=rescal(min,max,inc)param=min;i=1;while ~(param > max)
res(i,:)=[param fsolve(@(x) Calcio3ap(x,param),[0.5 0.5 0.5]);];param= param + inc;i=i+1;save(�anabif.txt�,�res�,�-ascii�);
endplot(res(:,1),res(:,2),�*�)hold on
99

plot(res(:,1),res(:,3),�.�)hold onplot(res(:,1),res(:,4),�-�)
A.3.2 Sistema parametrizado
%Oscilaciones caoticas%Sistema parametrizadofunction f = Calcio3_bk(t,x);f=zeros(5,1)%--------- parametros sistema Ca2+ ------------%beta = 0.65; K2 = 0.1;K5 = 0.3194; Ka = 0.1;Kd = 1; Ky = 0.3;Kz = 0.6; %k = 10;kf = 1; e = 13;n = 4; m = 2;p = 1; Vo = 2;V1 = 2; Vm2 = 6;Vm3 = 30; V4 = 3;Vm5 = 50;%----------------------------------------%Ecuaciones diferenciales:f(1)=[ Vo + x(4)*V1 ] - [ Vm2*(x(1)^2/(K2^2+x(1)^2)) ] ...+ [ Vm3*(x(1)^m/(Kz^m+x(1)^m))*(x(2)^2/(Ky^2+x(2)^2)) ...*(x(3)^4/(Ka^4+x(3)^4)) ] + [ kf*x(2) - x(5)*x(1) ];
f(2)=[ Vm2*(x(1)^2/(K2^2+x(1)^2)) ] ...- [ Vm3*(x(1)^m/(Kz^m+x(1)^m))*(x(2)^2/(Ky^2+x(2)^2)) ...*(x(3)^4/(Ka^4+x(3)^4)) ] - [ kf*x(2) ];
f(3)=[ x(4)*V4] - [ Vm5*(x(3)^p/(K5^p+x(3)^p)) ...*(x(1)^n/(Kd^n+x(1)^n)) ] - [ e*x(3) ];
f(4)=[ -0.5*(x(4)-0.6) ];f(5)=[ -0.5*(x(5)-10) ];
A.4 Objetivos de control
A.4.1 Regulación
function dx = regula(t,x);dx = zeros(4,1);%--------- parametros sistema Ca2+ ------------beta = 0.65; K2 = 0.1;K5 = 0.3194; Ka = 0.1;Kd = 1; Ky = 0.3;
100

Kz = 0.6; k = 10;kf = 1; e = 13;n = 4; m = 2;p = 1; Vo = 2;V1 = 2; Vm2 = 6;Vm3 = 30; V4 = 3;Vm5 = 50;%----------------------------------------------Vin = Vo + beta*V1;% variable medida (calcio en el cytosol)y1 = x(1);% regulaciony1ref = 0.35;% se\U{f1}al de errore1=y1 - y1ref;% accion de controlkp1 = 25;kp2 = 25;% Inicio del controladorif (t>=10)u1=-kp1*e1 - kp2*x(4);elseu1=Vin;end% ---------- sistema de oscilaciones Ca2+ ----------V2 = Vm2*(x(1)^2/(K2*K2+x(1)^2));V3 = Vm3*(x(1)^m/(Kz^m+x(1)^m)*x(2)^2/(Ky*Ky+x(2)^2) ...
*x(3)^4/(Ka^4+x(3)^4));V5 = Vm5*(x(3)^p/(K5^p+x(3))*x(1)^n/(Kd^n+x(1)^n));dx(1) = u1 - V2 + V3 + kf*x(2) -k*x(1);dx(2) = V2 - V3 - kf*x(2);dx(3) = beta*V4 - V5 - e*x(3);dx(4) = sign(e1)*((abs(e1))^(0.5));% --------------------------------------------------plot(t,y1ref,�.�);hold on
A.4.2 Seguimiento
function dx = seguim(t,x);dx = zeros(4,1);% ---------- parametros sistema Ca2+ ----------beta = 0.65; K2 = 0.1;K5 = 0.3194; Ka = 0.1;Kd = 1; Ky = 0.3;
101

Kz = 0.6; k = 10;kf = 1; e = 13;n = 4; m = 2;p = 1; Vo = 2;V1 = 2; Vm2 = 6;Vm3 = 30; V4 = 3;Vm5 = 50;% ---------------------------------------------Vin = Vo + beta*V1;% variable medida (calcio en el cytosol)y1 = x(1);% seguimientoy1ref = 0.35 + 0.1*sin(2.5*t);% senal de errore1=y1 - y1ref;% parametros de controlkp1 = 25.0;kp2 = 25.0;% Inicio del controladorif (t>=10)
u1=-kp1*e1 - kp2*x(4);else
u1=Vin;end% ---------- sistema de oscilaciones ca2+ ----------V2 = Vm2*(x(1)^2/(K2*K2+x(1)^2));V3 = Vm3*(x(1)^m/(Kz^m+x(1)^m)*x(2)^2/(Ky*Ky+x(2)^2)
*x(3)^4/(Ka^4+x(3)^4));V5 = Vm5*(x(3)^p/(K5^p+x(3))*x(1)^n/(Kd^n+x(1)^n));dx(1) = u1 - V2 + V3 + kf*x(2) -k*x(1);dx(2) = V2 - V3 - kf*x(2);dx(3) = beta*V4 - V5 - e*x(3);dx(4) = sign(e1)*((abs(e1))^(0.5));% --------------------------------------------------plot(t,y1ref,�.�);hold on
A.4.3 Sincronización
function dx = sincro(t,x);dx = zeros(7,1);% ---------- parametros sistema maestro Ca2+ ----------beta = 0.65; K2 = 0.1;K5 = 0.3194; Ka = 0.1;Kd = 1; Ky = 0.3;
102

Kz = 0.6; k = 10;kf = 1; e = 13;n = 4; m = 2;p = 1; Vo = 2;V1 = 2; Vm2 = 6;Vm3 = 30; V4 = 3;Vm5 = 50;% ----------------------------------------------------% ---------- parametros sistema esclavo Ca2+ ---------betae = 0.46; K2e = 0.1;K5e = 1.0; Kae = 0.1;Kde = 0.6; Kye = 0.2;Kze = 0.3; ke = 10;kfe = 1; ee = 1;ne = 2; me = 4;pe = 1; Voe = 2;V1e = 2; Vm2e = 6;Vm3e = 20; V4e = 2.5;Vm5e = 30;% -----------------------------------------------------Vin = Vo + beta*V1;Vine = Voe + betae*V1e;% variable medida (calcio en el cytosol)y1 = x(1);% sincronizaciony1ref = x(4);%senal de errore1=y1 - y1ref;% accion de controlkp1 = 25.0;kp2 = 25.0;% Inicio del controladorif (t>=10)
u1=-kp1*e1 - kp2*x(7);else
u1=Vin;end% ---------- sistema maestro de oscilaciones ca2+ ----------V2 = Vm2*(x(1)^2/(K2*K2+x(1)^2));V3 = Vm3*(x(1)^m/(Kz^m+x(1)^m)*x(2)^2/(Ky*Ky+x(2)^2) ...
*x(3)^4/(Ka^4+x(3)^4));V5 = Vm5*(x(3)^p/(K5^p+x(3))*x(1)^n/(Kd^n+x(1)^n));
dx(1) = u1 - V2 + V3 + kf*x(2) -k*x(1);dx(2) = V2 - V3 - kf*x(2);dx(3) = beta*V4 - V5 - e*x(3);
103

% ---------------------------------------------------------% ---------- sistema esclavo de oscilaciones ca2+ ----------V2e = Vm2e*(x(4)^2/(K2e*K2e+x(4)^2));V3e = Vm3e*(x(4)^me/(Kze^me+x(4)^me)*x(5)^2/(Kye*Kye+x(5)^2) ...
*x(6)^4/(Kae^4+x(6)^4));V5e = Vm5e*(x(6)^pe/(K5e^pe+x(6))*x(4)^ne/(Kde^ne+x(4)^ne));
dx(4) = Vine - V2e + V3e + kfe*x(5) - ke*x(4);dx(5) = V2e - V3e - kfe*x(5);dx(6) = betae*V4e - V5e - ee*x(6);dx(7) = sign(e1)*((abs(e1))^(0.5));% ---------------------------------------------------------plot(t,u1,�.�);hold on
A.5 Observación
A.5.1 Sincronización usando modo deslizante
function dy = Obsliding(t,y);dy = zeros(6,1)%-------------- parametros del sistema Ca2+ ---------------beta = 0.65; K2 = 0.1;K5 = 0.3194; Ka = 0.1;Kd = 1; Ky = 0.3;Kz = 0.6; k = 10;kf = 1; e = 13;n = 4; m = 2;p = 1; Vo = 2;V1 = 2; Vm2 = 6;Vm3 = 30; V4 = 3;Vm5 = 50;%---------------------------------------------------------% senal de errore1 = y(1) - y(4);
%funcion signosigne1=sign(e1);%-------------- parametros del sistema --------------------Vin = Vo + beta*V1;V2 = Vm2*(y(1)^2/(K2*K2+y(1)^2));V3 = Vm3*(y(1)^m/(Kz^m+y(1)^m)*y(2)^2/(Ky*Ky+y(2)^2) ...
*y(3)^4/(Ka^4+y(3)^4));V5 = Vm5*(y(3)^p/(K5^p+y(3))*y(1)^n/(Kd^n+y(1)^n));
104

V2e = Vm2*(y(4)^2/(K2*K2+y(4)^2));V3e = Vm3*(y(4)^m/(Kz^m+y(4)^m)*y(2)^2/(Ky*Ky+y(5)^2) ...
*y(6)^4/(Ka^4+y(6)^4));V5e = Vm5*(y(6)^p/(K5^p+y(6))*y(4)^n/(Kd^n+y(4)^n));%-----------------------------------------------------------
u1 = abs(e1)^0.333;u2 = abs(y(1)-y(4))^0.333;u3 = abs(y(1)-y(4))^0.333;
%--------- sistema de oscilaciones de Ca2+ ----------------dy(1) = Vin - V2 + V3 + kf*y(2) -k*y(1);dy(2) = V2 - V3 - kf*y(2);dy(3) = beta*V4 - V5 -e*y(3);%----------------------------------------------------------%----------- sistema usando observadores ------------------dy(4) = Vin - V2e + V3e + kf*y(5) -k*y(4);dy(5) = V2e - V3e - kf*y(5);dy(6) = beta*V4 - V5e -e*y(6);%----------------------------------------------------------%------------- activacion del controlador -----------------if t > 10dy(4) = Vin - V2e + V3e + kf*y(5) -k*y(4) + 50*u1*signe1;dy(5) = V2e - V3e - kf*y(5) - 500*u2*signe1;dy(6) = beta*V4 - V5e -e*y(6) - u3*signe1;end%----------------------------------------------------------%plot(t,u1,t,u2,t,u3)plot(t,e1)hold on
A.5.2 Sincronización usando modo Luenberger
function dy = Obslbgr(t,y);dy = zeros(6,1)%-------------- parametros del sistema Ca2+ ---------------beta = 0.65; K2 = 0.1;K5 = 0.3194; Ka = 0.1;Kd = 1; Ky = 0.3;Kz = 0.6; k = 10;kf = 1; e = 13;n = 4; m = 2;p = 1; Vo = 2;V1 = 2; Vm2 = 6;
105

Vm3 = 30; V4 = 3;Vm5 = 50;%----------------------------------------------------------% senal de errore1 = y(1) - y(4);%funcion signosigne1=sign(e1);%-------------- parametros del sistema --------------------Vin = Vo + beta*V1;V2 = Vm2*(y(1)^2/(K2*K2+y(1)^2));V3 = Vm3*(y(1)^m/(Kz^m+y(1)^m)*y(2)^2/(Ky*Ky+y(2)^2) ...
*y(3)^4/(Ka^4+y(3)^4));V5 = Vm5*(y(3)^p/(K5^p+y(3))*y(1)^n/(Kd^n+y(1)^n));V2e = Vm2*(y(4)^2/(K2*K2+y(4)^2));V3e = Vm3*(y(4)^m/(Kz^m+y(4)^m)*y(2)^2/(Ky*Ky+y(5)^2) ...
*y(6)^4/(Ka^4+y(6)^4));V5e = Vm5*(y(6)^p/(K5^p+y(6))*y(4)^n/(Kd^n+y(4)^n));%----------------------------------------------------------
u1 = abs(e1)^0.333;u2 = abs(y(1)-y(4))^0.333;u3 = abs(y(1)-y(4))^0.333;
%--------- sistema de oscilaciones de ca ------------------dy(1) = Vin - V2 + V3 + kf*y(2) -k*y(1);dy(2) = V2 - V3 - kf*y(2);dy(3) = beta*V4 - V5 -e*y(3);%----------------------------------------------------------%--------- sistema usando observadores --------------------dy(4) = Vin - V2e + V3e + kf*y(5) -k*y(4);dy(5) = V2e - V3e - kf*y(5);dy(6) = beta*V4 - V5e -e*y(6);%----------------------------------------------------------%------------- activacion del controlador -----------------if t > 10dy(4) = Vin - V2e + V3e + kf*y(5) -k*y(4) + 50*e1;dy(5) = V2e - V3e - kf*y(5) -500*e1;dy(6) = beta*V4 - V5e -e*y(6);end%----------------------------------------------------------%plot(t,u1,t,u2,t,u3)plot(t,e1)hold on
106