andrea y angie
TRANSCRIPT



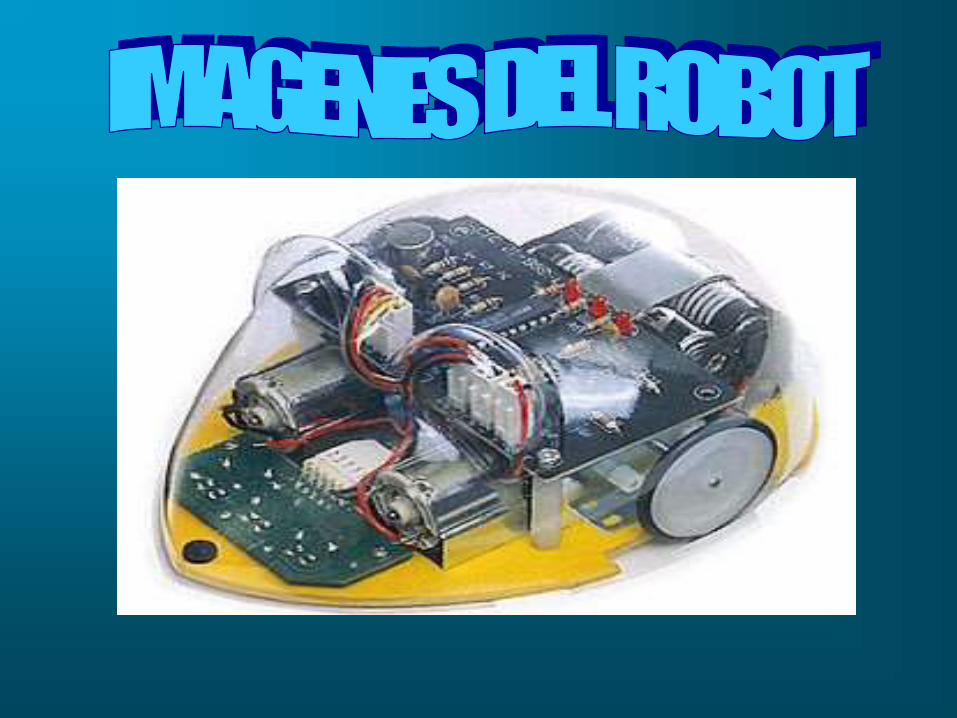
• DEFINICION• FUNCION• ESTRUCTURA BASICA• DESCRIPCION• MONTAJE• COMPONENTES ELECTRONICOS• PLANOS • IMAGES DEL ROBOT
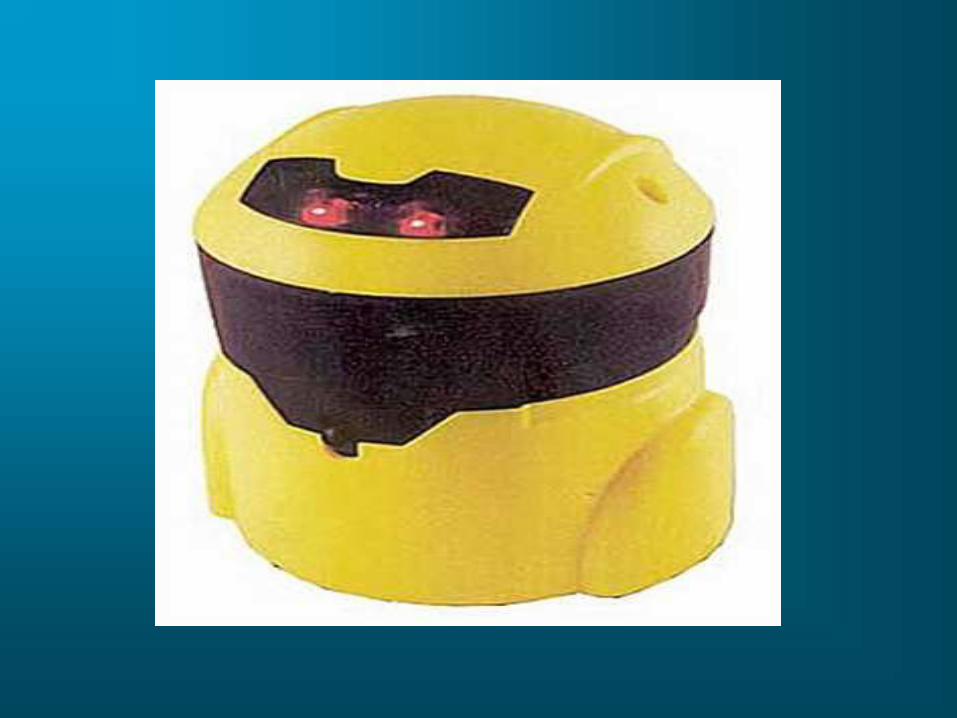
• Los robots seguidores de línea (o robots rastreadores) son robots muy sencillos, que cumplen una única misión: seguir una línea marcada en el suelo (normalmente una línea negra sobre un fondo blanco). Son considerados los "Hola mundo" de la robótica.

• Pondremos el robot en la superficie de fondo blanca y lo alimentaremos, como los dos censores están activos los motores permanecerán parados, ahora empujaremos el robot hasta la línea de trayectoria negra, al entrar uno de los censores con la línea negra este hará que el motor del lago contrario empiece a funcionar con lo que el robot entrara por si solo en la trayectoria, cuando tenga los dos censores viendo negro los 2 motores estarán en marcha con lo que el robot avanzara en línea recta, ahora bien si el llega a una curva y supongamos que el censor izquierdo sale de la línea negra entonces provocara que el motor del lado contrario (motor derecho) se desactiva con lo cual el robot girara a derecha (como un tanque) entrando de este modo en la línea negra otra vez... para el caso contrario pasa lo mismo pero con el otro motor y censor.
• Estos robots pueden variar desde los más básicos (van tras una línea única) hasta los robots que recorren laberintos. Todos ellos, sin embargo, poseen (por lo general) ciertas partes básicas comunes entre todos:
• Censores: Un rastreador detecta la línea a seguir por medio de censores. Hay muchos tipos de censores que se pueden usar para este fin; sin embargo, por razones de costos y practicidad los más comunes son los censores infrarrojos (IR), que normalmente constan de un LED infrarrojo y un fototransistor.
• Motores: El robot se mueve utilizando motores. Dependiendo del tamaño, el peso, la precisión del motor, entre otros factores, éstos pueden ser de varias clases: motores de corriente continua, motores paso a paso o servomotores.
• Ruedas: Las ruedas del robot son movidas por los motores. Normalmente se usan ruedas de materiales anti-deslizantes para evitar fallas de tracción. Su tamaño es otro factor a tener en cuenta a la hora de armar el robot.
• Fuente de energía: El robot obtiene la energía que necesita para su funcionamiento de baterías o de una fuente de corriente alterna, siendo esta última menos utilizada debido a que le resta independencia al robot.
• Tarjeta de control: La toma de decisiones y el control de los motores están generalmente a cargo de un microcontrolador.
• He aquí un diseño súper simple para montar un rastreador de líneas básico con 2 censores CNY70 y componentes discretos de fácil compra en cualquier comercio de electrónica.
• En el esquema mostrado se puede apreciar como funciona el circuito, el Led emisor del censor CNY70 se alimenta a través de una resistencia R1 de 680 Ω, cuando una superficie reflectante como el color blanco de la superficie por donde se moverá el rastreador, refleja la luz del Led emisor.

• El robot se compondrá de un circuito que podremos hacer fácilmente con una placa de topos o de prototipos o usando los fotolitos expuestos y este tendrá dos circuitos exactamente iguales uno para cada censor-motor e irán cruzados con lo que el censor izquierdo actuara sobre el motor derecho y el censor derecho sobre el motor izquierdo tal como se muestra en la ilustración.
• Los motores tienen que ser de corriente continua y habrá que fabricarles una reductora si no disponen de ella para mover las ruedas, contra mas grandes sean las ruedas, mas velocidad alcanzara el robot, aunque no hay que pasarse con el diámetro de estas porque si no en las curvas se saldrá de trayectoria, unos 6 cm. es lo ideal.

2 Opto acopladores CNY70 (censores) • 2 Transistores BC547 • 2 Transistores BC557 • 2 Transistores BD140 • 3 Clemas de conexión de Ci.. • 2 Resistencias de 680 OH • 2 Resistencias de 10 Koh • 2 Resistencias de 2k2 • 1 Porta pilas R6 • 1 Interruptor deslizante