apostila adcp ana.pdf
TRANSCRIPT

CCuurrssoo ddee MMeeddiiddoorreess ddee VVaazzããoo AAccúússtt iiccaa DDoopppplleerr
MMóódduulloo AAvvaannççaaddoo
AAuuttoorr:: EEnngg °° PPaauulloo EEvveerraarrddoo GGaammaarroo

IIII CCuurrssoo AAvvaannççaaddoo ddee MMeeddiiddoorreess ddee VVaazzããoo AAccúússtt iiccaa DDoopppplleerr
1111 aa 1155 ddee jjuullhhoo ddee 22001111
FFoozz ddoo IIgguuaaççuu -- PPRR
Realização:
Agência Nacional de Águas
Apoio: ITAIPU Binacional
Parque Tecnológico Itaipu

Coordenação Geral:
Antônio Otélo Cardoso – ITAIPU BINACIONAL Rodrigo Flecha Ferreira Alves – SAG / ANA Valdemar Santos Guimarães – SAR / ANA
Coordenação Técnica:
Paulo Everardo Muniz Gamaro – Itaipu Binacional Mauro Sílvio Rodrigues
Matheus Marinho de Faria – SAG / ANA
Corpo Docente:
Paulo Everardo Muniz Gamaro – Itaipu Binacional
Instrutores :
Karine Azeredo Lima – Itaipu Binacional Luiz Henrique Maldonado – Itaipu Binacional
Sérgio Túlio – Itaipu Binacional
Edição do material técnico:
Paulo Everardo Muniz Gamaro – Itaipu Binacional
Equipe de apoio logístico:
Francisco A. Martins Isaias J. dos Santos
Mário Luiz Dotto Pedro Paulo da Silva

APRESENTAÇÃO DO AUTOR
Esta apostila é uma compilação de notas de campo, diversos estudos, análises e trocas de informações informais entre operadores e estudiosos, e provem destas minhas experiências de pelo menos uma década, na maioria de campo, tudo que foi aqui escrito.
Pois foi assim que começamos, aqui no Brasil e fora também, pois são estas trocas possibilitaram o conhecimento que temos hoje, e mais, é se organizando para que estas trocas aumentem que expandiremos nossos horizontes em medições acústicas.
Espera-se que com o conhecimento dos erros já cometidos, possamos evitar repeti-los, ou que outros o repitam.
“Para se preservar é preciso conhecer, para conhecer é preciso saber quanto temos para saber quanto temos é preciso MEDIR”.
A busca pelo dado básico em nosso país nos dias de hoje é quase que um ato de heroísmo, poucas empresas estão realmente empenhadas nisso, e pouco valor se da a esta ferramenta imprescindível a todo o resto da hidrologia, menos valor ainda àqueles que labutam de sol a chuva, buscando manter estes dados com a qualidade mínima necessária. Não fosse a obstinada busca da qualidade deste serviço, os dados básicos deste país estariam em estado mais lastimável do que se encontram.
Quero aqui expressar meus sentimentos mais profundos àqueles que fazem desta busca quase que um sacerdócio, muitas vezes dependendo apenas do esforço próprio e a noção de dever.
PAULO EVERARDO MUNIZ GAMARO
Engenheiro da Divisão de Estudos Hidrológicos e Energéticos da Itaipu Binacional

PREFACIO
Devido ao imenso campo que é a área de medições com equipamentos acústicos Doppler, achamos por bem dividir em módulos os cursos para uma melhor compreensão, e também para que o nível de conhecimento necessário para certas tarefas e ou projetos seja equilibrado, evitando com isto encher os técnicos de campo com partes teóricas que não irá ajudá-los em suas tarefas, por outro lado insistimos que cada equipe tenha pelo menos um individuo que esteja treinado e acompanhando o desenvolvimento da tecnologia, bem como saiba como funciona e suas teorias desde conhecimentos de estatística aqui aplicada, até pequenas noções da acústica e acústica aplicada aos aparelhos.
Isto que a principio parece ser um exagero, com a solução de muitos problemas no campo utilizando este conhecimento se verificará que esta bem dimensionada.
SUMÁRIO
SUMÁRIO .......................................................................................................................6
ÍNDICE DE FIGURAS .....................................................................................................8
ÍNDICE DE TABELAS .................................. ..................................................................9
1. INTRODUÇÃO......................................................................................................10
1.1 A IMPORTÂNCIA DO SINAL E DE SEU PROCESSAMENTO ..........................................10
2. MEDIÇÕES NÃO TRIVIAIS.............................. ....................................................11
2.1 MEDIÇÕES COM DGPS......................................................................................11
2.2 TIPOS DE GPS E DGPS ....................................................................................11
2.2.1 GPS sem correção...................................................................................11
2.2.2 Wide Area Argumentation System WAAS ...............................................12
2.2.3 Coast Guard (Marinha BR) ......................................................................12
2.2.4 Real Time Kinematic RTK........................................................................12
2.2.5 Doppler Velocity.......................................................................................12
2.3 INCERTEZAS......................................................................................................12
2.4 NÍVEIS DE PRECISÃO HORIZONTAL ......................................................................14
2.5 ERROS CORRIGÍVEIS .........................................................................................14
2.6 CUIDADOS ANTES DA MEDIÇÃO............................................................................15
2.7 ERROS DE ORIENTAÇÃO .....................................................................................16
2.8 DISCREPÂNCIAS EXPERIMENTADAS EM MEDIÇÕES COM DGPS ..............................21
3. MEDIÇÕES EM SEÇÃO COM FUNDO MÓVEL.................. ................................23
3.1 INTRODUÇÃO.....................................................................................................23
3.2 TESTE DO FUNDO MÓVEL...................................................................................23
3.3 MÉTODO DA SUB-SEÇÃO MÉDIA .........................................................................25
3.4 MÉTODO DAS SUB-SEÇÕES................................................................................26
3.5 MÉTODO DE SEÇÃO POR SEÇÃO .........................................................................27
3.6 UTILIZAÇÃO DO ECOBATÍMETRO ACOPLADO .........................................................27
3.7 MÉTODO DO AZIMUTH ........................................................................................28
3.8 MÉTODO DO LOOP .............................................................................................29
4. UTILIZAÇÃO DE MEDIDORES ACÚSTICOS DOPPLER EM MEDIÇÕ ES DE SEDIMENTOS...............................................................................................................31
4.1 INTRODUÇÃO.....................................................................................................31

4.2 COMO O ADCP “VÊ” SEDIMENTO ........................................................................31
4.3 PERDAS DE TRANSMISSÃO .................................................................................32
4.4 RUÍDOS ............................................................................................................33
4.5 TIPOS DE RUÍDOS ..............................................................................................33
4.6 LIMITAÇÕES DO INSTRUMENTO............................................................................34
4.7 FATORES AFETANDO A PRECISÃO .......................................................................34

ÍNDICE DE FIGURAS
Figura 2.1: Tipos de correção de sinal. .....................................................................11
Figura 2.2: Vetores de orientação instrumental.........................................................13
Figura 2.3: Ativação dos botões GPS no Software WinRiver. ...................................16
Figura 2.4: Ativação dos botões GPS no Software RiverSurveyor............................16
Figura 2.5: Erro causado devido à bússola estar mal calibrada. ...............................17
Figura 2.6: Calibração da bússola usando DGPS. ....................................................18
Figura 2.7: Inserção dos valores de correção da orientação magnética no WinRiver.
............................................................................................................................18
Figura 2.8: Travessia – velocidade x tempo tendo como referencia o DGPS. ..........19
Figura 2.9: Travessia – velocidade x tempo tendo como referencia o Bottom
Tracking...............................................................................................................19
Figura 2.10: Medição tendo como referencia o Bottom Tracking. .............................20
Figura 2.11: Medição tendo como referencia o DGPS. .............................................20
Figura 2.12: Seção com fundo móvel. .......................................................................21
Figura 2.13: Velocidades do Barco com DGPS.........................................................22
Figura 2.14: Velocidades do Barco com BT. .............................................................22
Figura 3.1: Comparação das velocidades no teste de fundo móvel. .........................24
Figura 3.2: Erros de magnitude próximos à margem rasa. .......................................28
Figura 3.3 – Método Azimuth. ...................................................................................29
Figura 3.4: Método Loop: a) seção sem fundo móvel e b) seção com fundo móvel..29

ÍNDICE DE TABELAS
Tabela 2.1: Referência DGPS...................................................................................21
Tabela 2.2: Referência Bottom Tracking. ..................................................................21
Tabela 2.3: Dados DGPS GGA. ................................................................................22
Tabela 3.1: Exemplo de testes realizados com fundo móvel. ...................................26
Tabela 3.2: Comparativo Medição com Ecobatímetro x Medição com BTrack em
seções sem fundo móvel.....................................................................................28

1. INTRODUÇÃO
Som sob a água, um ramo especializado da ciência e tecnologia, tem sido estudado e utilizado desde a Primeira Guerra Mundial, mas teve um grande desenvolvimento durante a Segunda Guerra Mundial. Os sonares então desenvolvidos possibilitaram a América vencer a batalha contra os submarinos alemães conhecidos como U boats.
No entanto uma das primeiras referencias ao fato de existir som sob a água se encontrou em anotações do grande gênio arquiteto e engenheiro Leonardo Da Vinci em 1490. Ele escreveu “... se você faz sua embarcação parar, coloca um tubo com a uma extremidade na água, e a outra extremidade em seu ouvido, você ouvirá navios a grande distancia de você”.
1.1 A importância do sinal e de seu processamento
Todo segredo da boa medição inicia no processamento do sinal, o conhecimento de suas limitações e a busca de realizar medições sem exceder estes limites constitui o esforço de todo operador dos equipamentos Doppler.

2. MEDIÇÕES NÃO TRIVIAIS
2.1 Medições com DGPS
Como a função Bottom Tracking fornece velocidade da embarcação, profundidade, e direção da embarcação, não há vantagem em se utilizar um DGPS acoplado ao ADCP/ADP, a menos das seguintes situações:
• Fundo Móvel;
• Locais com forte interferência magnética;
• Locais cujo alcance do Bottom Tracking é excedido;
• Posicionamento Absoluto da embarcação é importante (georeferenciamento).
Devemos ter em conta aqui que a utilização do Bottom Tracking é quase sempre melhor que a utilização de um DGPS.
A precisão, ou erro de uma medição com GPS começa na escolha do GPS, e se utilizado, a correção do sinal.
Figura 0.1: Tipos de correção de sinal.
Fonte: Rainville, 2007.
2.2 Tipos de GPS e DGPS
2.2.1 GPS sem correção
Depende da geometria da constelação e disponibilidade na hora da medição. A falta de correção pode ocasionar medições com picos de velocidade e vazões com erros grandes.
A utilização de GPS tem sua precisão tão baixa que necessitaria tirar a média de aproximadamente 2,5 horas para atingir uma precisão de 1 cm/s, e por isso não vou considerar esta uma opção.
2.2.2 Wide Area Argumentation System WAAS
O sistema é direcionado para necessidades da aviação, e se baseia em satélites baixos no horizonte, confiabilidade no solo é baixa especialmente em regiões montanhosas e vales.
2.2.3 Coast Guard (Marinha BR)
Sistema disponível apenas na costa brasileira
2.2.4 Real Time Kinematic RTK
Necessitam dois receivers para produzir a correção, um na margem e outro na embarcação, capaz de até corrigir erros gerados pelas margens e pontes. Parece ser o sistema que melhor se adapta as condições de medição com ADCPs.
2.2.5 Doppler Velocity
Alguns sinais provem para alguns aparelhos receptores entre as linhas $GPVTG, esta velocidade é calculada acessando o efeito Doppler nas fases da freqüência de transmissão. O método exige pelo menos 4 satélites, devido ao tempo curto das amostras este método sofre pouco impacto dos problemas que aos outros métodos diminuem a precisão, e não tem diferença se possuem correção ou não.
2.3 Incertezas
O DGPS, ou Differential GPS, mesmo os mais avançados, determinam a posição do barco com uma incerteza ( σv) que introduz um erro (σR) no cálculo da velocidade.
t
Rv ∆
= σσ 2 (01)
Onde,
∆t = tempo de amostragem de um ponto
Incertezas de ± 2m com um tempo de amostragem de 60 s causam uma incerteza na velocidade do barco de aproximadamente ± 4,7 cm/s que acaba

limitando a precisão nas medidas de velocidade. Se buscarmos uma precisão maior, por exemplo 1 cm/s o intervalo de amostragem tem que ser maior, isto para cada ponto, logo a resolução temporal dos perfis fica prejudicada (menos verticais).
Precisão de centímetros pode ser alcançada com o DGPS desde que trabalhem próximo da estação transmissora do sinal de correção (~ 100 Km), aqui no Brasil não temos quase estações deste tipo.
Hoje temos disponível os sistemas RTK é o sistema de maior precisão, no entanto seu preço quase que o inviabiliza, nos Estados Unidos é o sistema que mais tem se buscado utilizar.
A utilização do DGPS para cálculo do vetor velocidade do barco, requer uma série de cuidados, pois erros nos vetores velocidade do barco irão ocasionar erros no valor da vazão medida.
Em uma medição com o ADCP, como visto anteriormente, a velocidade da água é o resultado da diferença vetorial entre a velocidade relativa e a velocidade da embarcação normalmente a última medida com o Bottom Tracking, que é a utilização do efeito Doppler no fundo para medir a velocidade do barco. Porém em casos de fundo móvel ou outra das necessidades descritas1, a velocidade da embarcação é medida através do GPS, ou seja triangulação via satélite.
É aqui que os erros podem ser inseridos uma vez que a velocidade da água é medida em relação ao norte magnético, pois é utilizada a bússola do ADCP, e a velocidade da embarcação é em relação ao norte verdadeiro utilizado pelos satélites.
Como os dois têm uma diferença entre si, esta diferença ficará sendo o erro na velocidade da água, logo na vazão.
Figura 0.2: Vetores de orientação instrumental.
Fonte: Muller, 2002.
1 Fato que desestimulo por trazer para medição mais fatores de erro

Como exemplo de erro: Um desalinhamento de 50 (cinco graus) entre o DGPS (norte verdadeiro) e a bússola do ADCP (norte magnético) resulta em 8% de erro na velocidade da água.
Vamos ver que uma série de erros potenciais passa a existir quando da utilização de DGPS.
A precisão da posição absoluta de um ponto é função da faixa de precisão da medição, da geometria dos satélites, e do número de satélites usado na solução (Muller -2004).
O conhecimento de certos parâmetros se faz necessário para uma avaliação da medição que estamos realizando.
• HDOP - Horizontal Dilution of Precision: É uma medida de possível erro devido à geometria dos satélites (horizontal ou Latitude e Longitude) valor recomendado menor que 1.
• PDOP – Position Dilution of Precision: É uma medida de possível erro devido à geometria dos satélites que inclui horizontal e vertical (altitude), valor recomendado menor que 4.
2.4 Níveis de Precisão Horizontal
• GPS com SA ligado: 50 a 100 m 95% do tempo
• GPS com SA desligado: 12 a 15 m 95% do tempo
• DGPS codificado com fases: 0,5 a 3 m 95% do tempo
• RTK DGPS carrier phased: 1 a 5 cm 95% do tempo
• Carrier phased DGPS em modo estático: sub cm
2.5 Erros Corrigíveis
• AS (Selective Availability): fonte de erro introduzida pelos militares dos EUA;
• Erros da Troposfera - um metro do solo até aproximadamente 13 km de altura: Mudanças climáticas, umidade, temperatura e pressão, normalmente satélites mais baixos no horizonte são mais sujeitos que os satélites sobre o alvo. Normalmente modelados no software do fabricante;
• Erros da Ionosfera – camada da atmosfera entre 50 e 500 km: Manchas solares e outros fenômenos eletromagnéticos. Os erros não são previsíveis, mas podem ser estimados, nem todo o erro pode ser removido (erros no relógio) (Muller -2006).
2.6 Cuidados antes da medição
O primeiro cuidado é a realização da calibração da bússola no local a ser realizada a medição (Maximo 30 km de distância).
Uma vez com o GPS acoplado, deve ser utilizado o método 3 descrito no WinRiver Users Guide, isto porque este método permite sua realização em seções com fundo móvel, normalmente o local que se usa DGPS2.
A lente 3 deve ser usada para frente evitando com isso outra fonte de erro que seria medir com exatidão o ângulo da lente 3 com a frente do barco.
Uma vez concluída a calibração, deve ser feita à inserção da declinação magnética. Como aqui a precisão afeta a vazão, é recomendado que se calcule a mesma no local seguindo as instruções do Item 7.4.1 do mesmo manual.
Como exemplo de um erro toma-se um barco se movendo a 5 nós e com um erro de 2º ocasiona um erro de velocidade de 8 cm/s
Para os equipamentos da Sontek a calibração a ser realizada deve ser feita no seu software River Surveyor -> User Set up -> calibrate compass e seguir instruções, ao final da calibração o programa da à nota e grava a calibração em arquivo.
Para medir com o DGPS em equipamento da RDI, fazer a conexão do DGPS na saída serial do notebook (que deve possuir duas, uma para DGPS e a outra para o próprio ADCP), entrar no WinRiver e settings -> reference marcar GPS (GGA [mais usada] ou VTG), abrir View ->Tabular Views-> GPS Tabular para acompanhar o desempenho.
Similar aos equipamentos da RDI, os da Sontek fazem a mesma conexão no notebook. Os botões de GPS para leitura de fundo e cálculo da velocidade da água devem ser clicados. Abaixo, dados da Estação de Trabalho para medir com DGPS – rio Monday Posto Silva (02/12/2004).
2 Este método só é possível em equipamentos WH Rio Grande cujos firmware foram modificados para tal, Monitors e BroadBand (Laranjas) não tem essa capacidade.
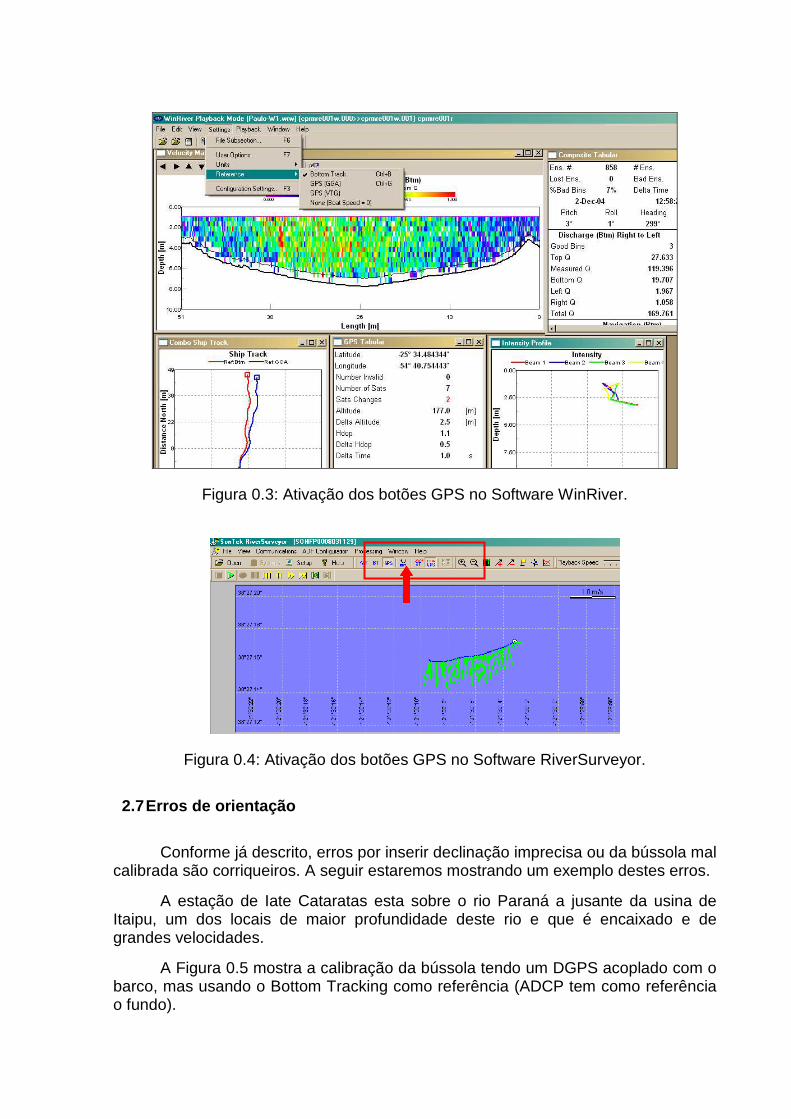
Figura 0.3: Ativação dos botões GPS no Software WinRiver.
Figura 0.4: Ativação dos botões GPS no Software RiverSurveyor.
2.7 Erros de orientação
Conforme já descrito, erros por inserir declinação imprecisa ou da bússola mal calibrada são corriqueiros. A seguir estaremos mostrando um exemplo destes erros.
A estação de Iate Cataratas esta sobre o rio Paraná a jusante da usina de Itaipu, um dos locais de maior profundidade deste rio e que é encaixado e de grandes velocidades.
A Figura 0.5 mostra a calibração da bússola tendo um DGPS acoplado com o barco, mas usando o Bottom Tracking como referência (ADCP tem como referência o fundo).
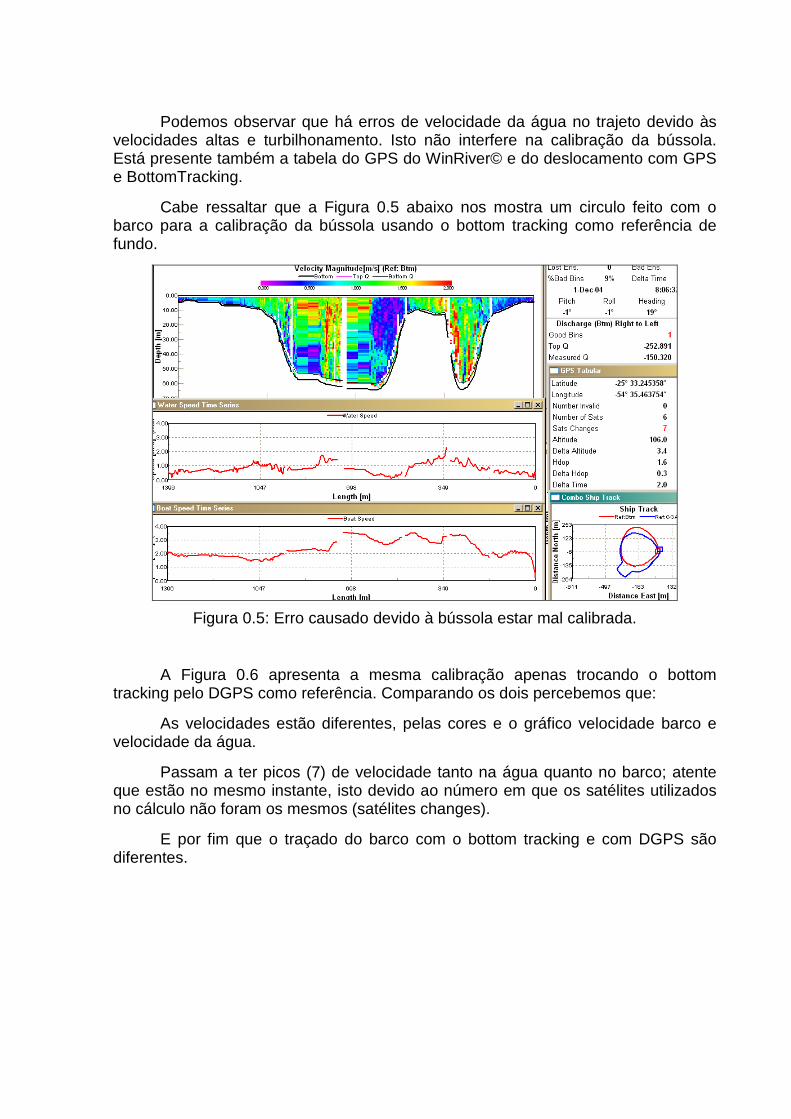
Podemos observar que há erros de velocidade da água no trajeto devido às velocidades altas e turbilhonamento. Isto não interfere na calibração da bússola. Está presente também a tabela do GPS do WinRiver© e do deslocamento com GPS e BottomTracking.
Cabe ressaltar que a Figura 0.5 abaixo nos mostra um circulo feito com o barco para a calibração da bússola usando o bottom tracking como referência de fundo.
Figura 0.5: Erro causado devido à bússola estar mal calibrada.
A Figura 0.6 apresenta a mesma calibração apenas trocando o bottom tracking pelo DGPS como referência. Comparando os dois percebemos que:
As velocidades estão diferentes, pelas cores e o gráfico velocidade barco e velocidade da água.
Passam a ter picos (7) de velocidade tanto na água quanto no barco; atente que estão no mesmo instante, isto devido ao número em que os satélites utilizados no cálculo não foram os mesmos (satélites changes).
E por fim que o traçado do barco com o bottom tracking e com DGPS são diferentes.
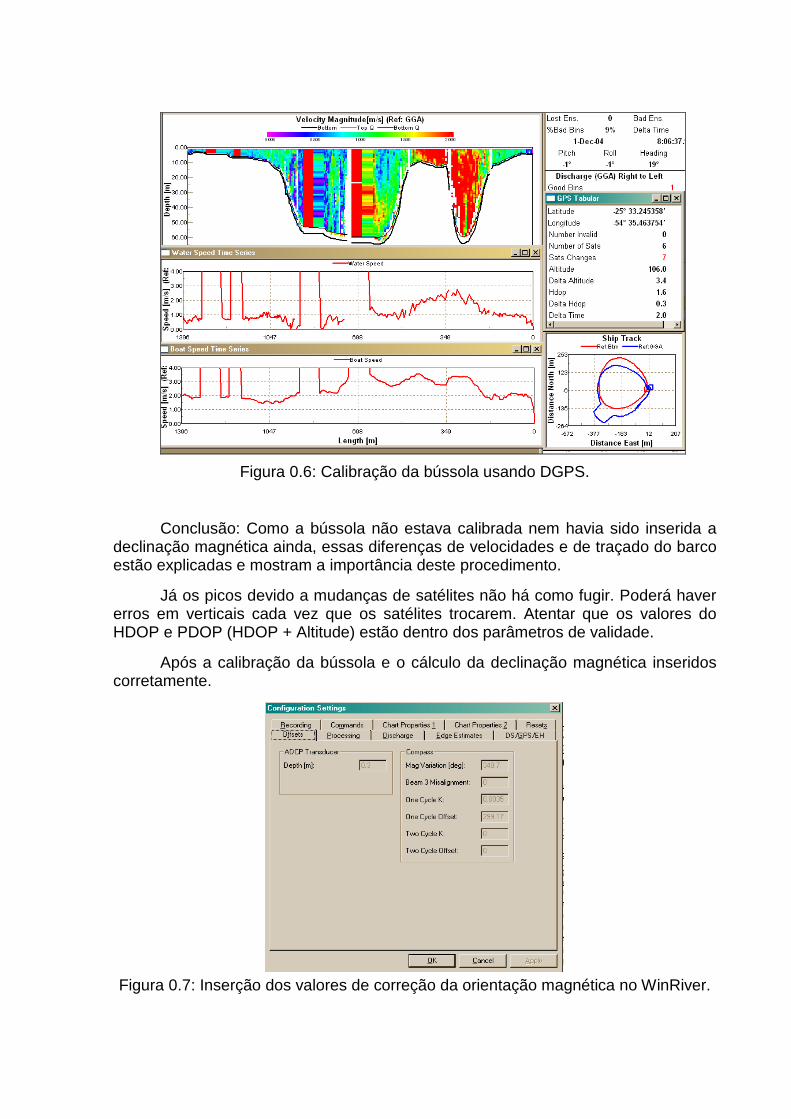
Figura 0.6: Calibração da bússola usando DGPS.
Conclusão: Como a bússola não estava calibrada nem havia sido inserida a declinação magnética ainda, essas diferenças de velocidades e de traçado do barco estão explicadas e mostram a importância deste procedimento.
Já os picos devido a mudanças de satélites não há como fugir. Poderá haver erros em verticais cada vez que os satélites trocarem. Atentar que os valores do HDOP e PDOP (HDOP + Altitude) estão dentro dos parâmetros de validade.
Após a calibração da bússola e o cálculo da declinação magnética inseridos corretamente.
Figura 0.7: Inserção dos valores de correção da orientação magnética no WinRiver.
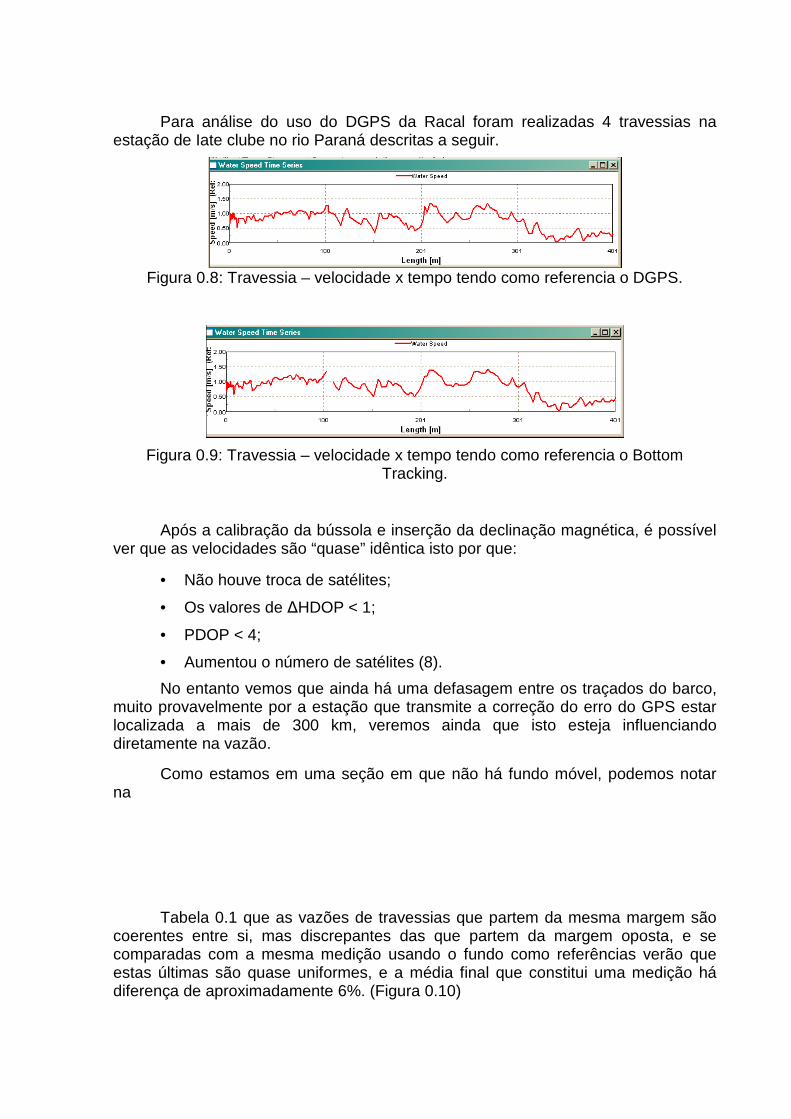
Para análise do uso do DGPS da Racal foram realizadas 4 travessias na estação de Iate clube no rio Paraná descritas a seguir.
Figura 0.8: Travessia – velocidade x tempo tendo como referencia o DGPS.
Figura 0.9: Travessia – velocidade x tempo tendo como referencia o Bottom
Tracking.
Após a calibração da bússola e inserção da declinação magnética, é possível ver que as velocidades são “quase” idêntica isto por que:
• Não houve troca de satélites;
• Os valores de ∆HDOP < 1;
• PDOP < 4;
• Aumentou o número de satélites (8).
No entanto vemos que ainda há uma defasagem entre os traçados do barco, muito provavelmente por a estação que transmite a correção do erro do GPS estar localizada a mais de 300 km, veremos ainda que isto esteja influenciando diretamente na vazão.
Como estamos em uma seção em que não há fundo móvel, podemos notar na
Tabela 0.1 que as vazões de travessias que partem da mesma margem são coerentes entre si, mas discrepantes das que partem da margem oposta, e se comparadas com a mesma medição usando o fundo como referências verão que estas últimas são quase uniformes, e a média final que constitui uma medição há diferença de aproximadamente 6%. (Figura 0.10)

Figura 0.10: Medição tendo como referencia o Bottom Tracking.
Figura 0.11: Medição tendo como referencia o DGPS.

Tabela 0.1: Referência DGPS.
Tabela 0.2: Referência Bottom Tracking.
Para um local em que não se necessita utilizar o DGPS para o processamento da medição, estamos inserindo um erro sem necessidade na vazão final, mas em locais com fundo móvel este erro seria aceitável em face de correção que o DGPS estaria fazendo ao longo de toda a travessia.
Esta apostila não tem como fim substituir a experiência no campo onde cada um poderá com certeza verificar outros erros e aumentar sua capacidade de reconhecê-los.
Existem relatórios de uma bateria de testes com vários tipos de GPS e suas comparações com bottom tracking feito pela USGS, bem como alguns trabalhos comparativos, verificar nas referencias, aconselho a sua leitura e analise.
2.8 Discrepâncias experimentadas em medições com DG PS
Figura 0.12: Seção com fundo móvel.
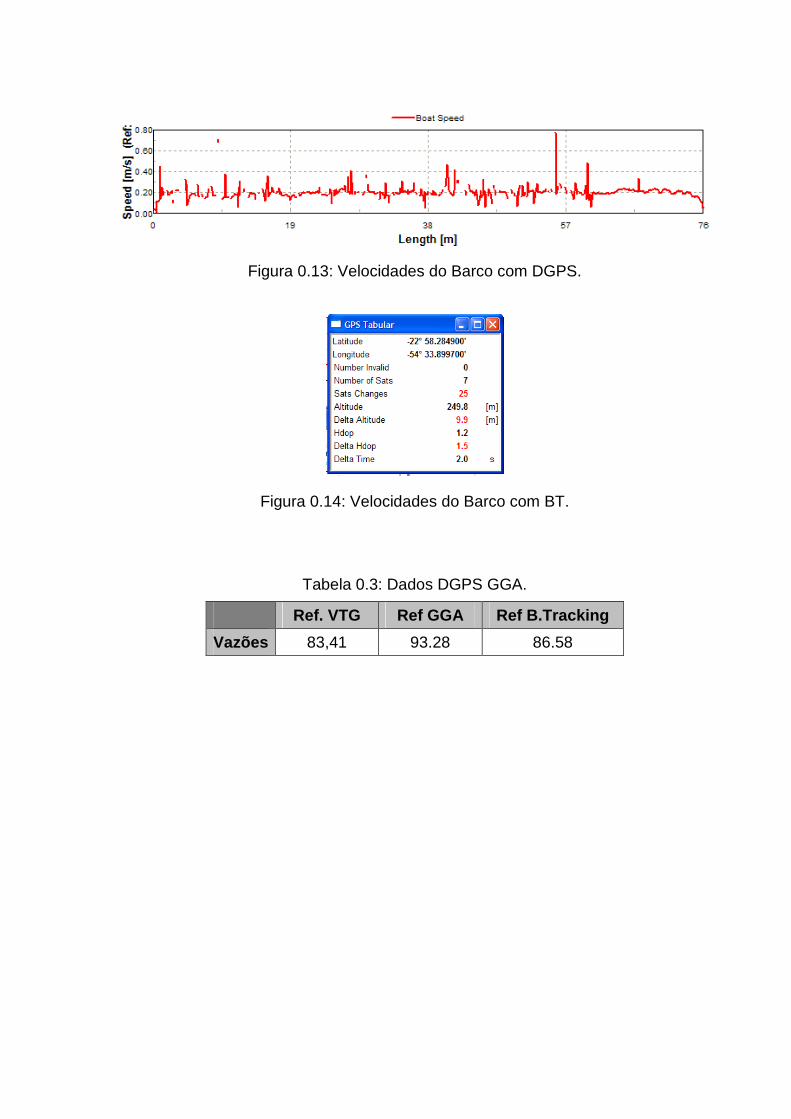
Figura 0.13: Velocidades do Barco com DGPS.
Figura 0.14: Velocidades do Barco com BT.
Tabela 0.3: Dados DGPS GGA.
Ref. VTG Ref GGA Ref B.Tracking
Vazões 83,41 93.28 86.58
3. MEDIÇÕES EM SEÇÃO COM FUNDO MÓVEL
3.1 Introdução
Um dos erros mais comuns em nosso território nas medições Doppler é o que ocorre quando se realiza medições em locais com fundo móvel sem se dar conta disso, e tomamos o valor medido como o verdadeiro, isto ocasiona uma medição sempre a menor, que se utilizada repetidamente fornecerá uma Curva-chave subdimensionada. A isto se deve devido a grande maioria de nossas equipes de campo não realizarem o teste para verificação de fundo móvel.
Este tipo de erro ocorre quando os sedimentos carreados junto ao fundo são lidos pelo equipamento como se fosse o leito (GAMARO, 2003), introduzindo assim um erro na velocidade do barco que é calculada com esta leitura, como a velocidade medida pelo ADCP é uma velocidade relativa, ou seja, velocidades da água mais do barco, para se conhecer a velocidade da água é preciso extrair a velocidade do barco, que neste caso estará maior que o real, ocasionando uma velocidade da água a menor, logo o mesmo acontecendo à vazão.
Este fenômeno não foi muito levado em conta até meados de 2002 quando se passou a incluir nos procedimentos de uma medição Doppler o teste do fundo móvel, com isto se descobriu que havia mais seções com este problema que supúnhamos, e havia locais com um já longo histórico de medições e até curvas chave com este erro inserido.
Foi desenvolvido um método para correção parcial destas medições (GAMARO, 2003), e vários métodos propostos para realizar a medição se descobrimos ter fundo móvel ao realizarmos o teste, este capitulo ira falar sobre estes métodos e suas vantagens e desvantagens.
3.2 Teste do Fundo Móvel
Para se verificar se há fundo móvel em uma seção é necessário que se mantenha o barco parado3 por um período maior que 5 minutos medindo-se a velocidade.
Após este período que quanto maior melhor a detecção, comparar o DMG (Distance Made Good) com o Lenght, se forem muito diferentes é sinal de que pode haver fundo móvel, para sabermos se este valor é considerável temos que calcular a velocidade do fundo móvel e compara-la com a velocidade média da seção durante o teste.
Exemplo: Rio Iguatemi 2005 com um ADCP 600 kHz e um ADP 1500 kHz
3 Ancorado, no motor com ponto de referencia, no cabo etc.

1441,030,367
92,52 ===Time
DMGV fm
1879,0
360
63,67 =
A primeira observação é que as velocidades são percebidas diferentemente pelas diferentes freqüências. Freqüências maiores percebem maiores velocidades do fundo.
A segunda observação é de que não temos a menor idéia do peso destas velocidades para a medição.
a) b)
Figura 0.15: Comparação das velocidades no teste de fundo móvel.
Para avaliar esta velocidade do fundo é preciso estabelecer a razão da velocidade do fundo móvel pela velocidade média da água durante o teste (Percentual de Relevância), se for maior que 1 % (Rainville 2002 )deve ser feita uma correção na medição ou utilizar algum método para evitar o erro (Gamaro, 2005).
125,0151,1
1441,0 ==m
fm
V
V
3239,0
58,0
1879,0 =
Uma vez verificada que o Fundo móvel é hora então de definir como medir, entre os métodos abaixo:
• DGPS acoplado
• Método da Sub-seção
ou 12,5 % ou 19,4 %
• Seção por Seção
• Ecobatimetro Acoplado
• Método do Azimute
• Método do Loop
A utilização do DGPS já foi discutida no capítulo anterior.
3.3 Método da Sub-Seção Média
Neste método é feita uma correção da vazão através do calculo da vazão perdida calculada com a velocidade do fundo móvel.
É um método que apenas atenua o erro inserido pelo fundo móvel, e é usado em locais com dificuldade para utilizar outros métodos, quer pela dificuldade da seção, quer pelo tempo despendido nos outros métodos.
Consiste em se calcular a velocidade do “fundo” usando os dados do teste de fundo móvel, que teoricamente deve ser feito antes de iniciar a medição, logo ganha tempo. Parte do pressuposto que o teste deve ser realizado buscando-se o local de maior velocidade da água, ou local potencialmente propicio para maior velocidade do fundo.
Tomemos o exemplo acima (ADCP 600 kHz):
Vfm=0,1441
A fórmula para correção é a seguinte:
( )[ ]mediafmmediamedidacorrigida VVVQQ /+= (02)
Vmédia= Q/A � 188,77/ 196,64 = 0,960 m/s
Q = vazão tirada da medição de vazão:
A = Área da medição de vazão
Qcorrigida=188,77 ((0,96 + 0,14)/0,96) = 217,10 m3/s
Este método tem muitas assunções que o levam a uma incerteza de precisão, mas reduz o erro e em certos locais e devido ao tempo é o mais pratico e rápido.
As incertezas provem de:
• Um único local para medir a velocidade de fundo, e nem sempre o local de maior velocidade é o de maior arrastro de fundo, ou representa a distribuição do fundo móvel ao longo da seção.

• O balançar do barco pode afetar a medida da velocidade de fundo.
3.4 Método das Sub-Seções
Este método é uma tentativa de melhorar a qualidade do método anterior. Nele são feitos mais testes de fundo móvel, de preferência espaçados regularmente. Este método também é usado para seções conhecidas onde se queira medir em locais de melhor qualidade dos dados de fundo. Calculam-se as velocidades de fundo em cada um dos testes e utiliza-se a media destas velocidades para calcular a vazão perdida.
Exemplo: rio Solimões em Manacapuru, ADCP WH Monitor 300 kHz.
Seção rochosa na margem esquerda e arenosa na margem direita. Foram realizados 20 testes de fundo móvel em uma seção de 3080 m de largura. Destes testes calculamos as velocidades do fundo das quais tiraremos a média que multiplicada pela área teremos a vazão de correção que deve ser acrescentada a vazão medida.
Qmedido = 100.334 m3/s com ADCP.
Tabela 0.4: Exemplo de testes realizados com fundo móvel.
Teste Vfm Percentual de Relevância 1 0,005 1,25 2 0,006 0,92 3 0,020 2,34 4 0,012 1,27 5 0,023 2,09 6 0,018 1,66 7 0,017 1,78 8 0,010 0,91 9 0,035 3,62
10 0,030 2,66 11 0,012 0,98 12 0,1 9,73 13 0,036 4,39 14 0,044 5,12 15 0,047 6,29 16 0,059 8,49 17 0,007 0,94 18 0,016 2,23 19 0,009 1,33 20 0,006 1,31
Media 0,026
Verificamos que conforme o teste é realizado mais próximo da margem direita maior é o coeficiente de relevância, e que apenas em 4 testes não houve relevância. Logo deve ser feita a correção.
Qcorrigida = Qmedida + AV fm *
Qcorrigida = 100 334 + (0,026 x 82 628) = 102 482 m3/s
A vazão esperada seria próxima de 104200 m3/s, valor encontrado na medição com molinete de barco não ancorado, apesar desta não ser padrão para conferir uma medição com Doppler, isto nos mostra que o método busca diminuir o erro ocasionado pelo fundo móvel e não corrigi-lo. Podemos contar ainda como desvantagem que:
• Demanda tempo
• Não há como corrigir o balanço do barco no teste.
• Seção transversal deve ser perpendicular a corrente
3.5 Método de Seção por Seção
Constitui em realizar uma medição de vazão como se fora uma medição convencional, porem utilizando o ADCP/ADP para fazer a leitura de velocidades de cada vertical (Utilizar a referencia como “none”), as distancias entre as verticais é medida no momento da tomada de velocidades, normalmente a cabo, e a profundidade utilizada é a media entre o começo e o fim do tempo em cada vertical. (JOHNSON, 2004).
Utilizando o exemplo acima (Manacapuru -2005), o valor total medido pelo método foi de 104.640 m3/s mais uma vez comparando com a vazão do molinete encontramos apenas uma diferença de 440 m3/s, ou seja, menos de 1%.
Uma variação deste método para melhor. No passado o calculo era feito em uma planilha eletrônica tipo Excell, mas hoje as empresas disponibilizam para compra softwares que realizam o cálculo. A empresa Sontek o software Stationary, a TRDI o Section by section, e a Nortek já é esta a forma de fazer a medição4.
3.6 Utilização do Ecobatímetro acoplado
Neste caso as profundidades são tiradas do Ecobatímetro, e desta leitura ira sair à velocidade do barco a ser deduzida da velocidade relativa.
4 Ver no capitulo de softwares

A tabela 3 mostra as pequenas diferenças de vazão por travessia e a diferença da média que é a medição propriamente dita.
Há grandes erros de magnitude próximos a margens muito rasas no caso estudado, pois a freqüência do Eco estava preparada para 30 metros, e mesmo sendo um eco que muda a freqüência em locais rasos sua rapidez em fazê-lo não foi suficiente para evitar algumas leituras erradas (Figura 0.16).
Figura 0.16: Erros de magnitude próximos à margem rasa.
Tabela 0.5: Comparativo Medição com Ecobatímetro x Medição com BTrack em seções sem fundo móvel.
Travessias Vazão c/ Eco Vazão
c/Btrack Diferenç
a Percentual
1 12772,5 13006,39 233,889 1,80
2 12553,64 12761,66 208,024 1,63
3 12406,88 12665,06 258,175 2,04
4 12604,2 12825,39 221,191 1,72
Media 12584,31 12814,62 230,319 1,80
Desvio padrão 150,811 143,834 -6,977
Coeficiente Variação 0,01 0,01
Conclusão: Método eficiente para locais de fundo móvel, tem como negativo a utilização de outro equipamento e outro operador na equipe, que implica em maior custo operativo e a compra de um Ecobatímetro. Espere problemas em locais com variações grandes de profundidade, bem como seções muito profundas.
3.7 Método do Azimuth
O método consiste em estabelecer locais para inicio e fim da travessia, medir o azimute desta direção, após calibrar a bússola realizar medição normal, Ver o ângulo da travessia e corrigir conforme as fórmulas descritas na Figura 0.17 abaixo.

Figura 0.17 – Método Azimuth.
3.8 Método do Loop
Este método consiste em realizar uma travessia medindo com o equipamento Doppler e descrever um oito, tendo o cuidado de chegar ao mesmo ponto de saída a menos de 50 cm (p ex.uma bóia ).
Toma-se o DMG que é a distancia aparente entre o inicio e o fim do loop e dividi-se pelo tempo total do loop para obter a velocidade do fundo móvel. (Eq. 03)
A seguir realiza-se uma medição com o ADCP/ADP que é a medição com o ruído do fundo móvel e se corrige somando a ela a vazão não computada do fundo móvel que é tirada da Eq. 04.
a) b)
Figura 0.18: Método Loop: a) seção sem fundo móvel e b) seção com fundo móvel.
A velocidade do fundo móvel é a distancia entre o ponto inicial e o apresentado (DMG) dividido pelo tempo total do loop.
DMG

Para corrigir a vazão, toma-se a vazão medida com o fundo móvel de uma medição de quatro travessias, acrescenta-se o produto da velocidade do fundo móvel calculada com o loop pela Área retirada da medição.
Vfm = D / T (03)
Qcorrigida = Qmedida + Vfm * A (04)
Onde:
Vfm = Velocidade do fundo móvel
D = distancia aparente entre o fim do loop e a bóia (DMG)
T = tempo total do loop
Qcorrigida = Vazão corrigida
Qmedida = Vazão medida
A = área retirada das medições (Área perpendicular ao fluxo)
Pontos de Alta Relevância no método:
• Imprescindível calibrar a bússola antes de iniciar o processo
• Tentar manter velocidade do barco constante durante todo trajeto
• Erros potenciais devido ao formato da seção transversal
• Evitar demora no translado junto das margens

4. UTILIZAÇÃO DE MEDIDORES ACÚSTICOS DOPPLER EM MEDIÇÕES DE SEDIMENTOS
4.1 Introdução
As medições de quantitativas de sólidos em suspensão utilizando ADCPs ainda é uma ciência incipiente e extremamente melindrosa, pois exige conhecimentos sobre o equipamento e o processo para que seja analisada corretamente as correlações com o método tradicional antes da obtenção final.
4.2 Como o ADCP “vê” sedimento
As maior parte das micro partículas que nos referimos acima nada mais são que sedimentos, é de fácil entendimento que se pudermos medir a quantidade de retorno do eco e a sua força poderemos ter uma idéia do que há na água, esta é a maneira que o aparelho usa, na verdade é até um dos seus controles de qualidade.
No entanto retirar de uma leitura de força do sinal um valor para sedimento em suspensão requer um conhecimento mais profundo do aparelho e de hidro acústica.
Os ADCPs basicamente utilizam à equação modificada do sonar (Urick, 1975).
EL = SL-2TL + SV +10 log 10 (Ve )5 (05)
Sendo:
EL: nível do eco em dB
SL: nível da fonte no transdutor em dB
2TL: duas vezes as perdas de transmissão (ida e volta)
Sv: força volume de eco das partículas em dB
Ve: Volume ensonificado (célula)
Que para sedimentos pode ser escrita como:
Log [CSSmedido] = A+B *RB (06)
Onde:
5 A equação é ligeiramente diferente para ADPs devido a seu processamento ser diferente dos
ADCPs

RB = Acústico “backscatter” relativo
CSS = Concentração de sedimento em suspensão
A e B constantes retiradas da correlação entre o ABS - Acoustic Backscatter, retorno do pulso sonoro lido pelo ADCP/ADP e a concentração de e sedimentos medida com aparelhos “convencionais” em folha semi-log.
Colocando a equação (2) na forma exponencial fica:
CSSestimado = 10 (A+B*RB) (07)
A fórmula na sua concepção parece simples, no entanto temos que atentar para o fato de que para podermos usar o item RB na fórmula que é o ABS relativo. e não é o ABS puro, é necessário antes retirar o ABS puro do ABS relativo para chegarmos aos termos A e B.
Backscatter relativo é o eco no qual estão à soma do eco mais os ruídos térmicos e acústicos. Para uma análise real é necessário conhecer o nível de referencia, a partir do qual teremos apenas eco propriamente dito.
Teremos que lidar ainda com a diferença que há no sinal acústico ao ir se afastando da sua fonte.
4.3 Perdas de Transmissão
O item perdas de transmissão (TL) tem suas dificuldades, e não é simples de se calcular, algumas simplificações tem de ser feitas para possibilitar a operacionabilidade da formula.
O sinal emitido tem perdas por espraiamento (espalhamento, dispersão), atenuação (absorção) e cavitação (GAMARO, 2007).
Espraiamento ou dispersão é o efeito geométrico que representa o enfraquecimento regular do sinal acústico conforme ele se espalha para longe da fonte (URICK, 1967).
Absorção ou atenuação (α) é a forma real de perda, e envolve um processo de conversão de energia acústica em calor, e por isso representa realmente uma perda verdadeira de energia acústica para o meio onde a propagação ocorre. (GAMARO, 2007).
O termo da perda é calculada pela fórmula 4:
2TL = 20 log10 R + [ 2* α * R] (4)
R: distancia do volume ensonificado (célula) em metros
termo α : coeficiente de absorção em dB/m

20 log10 R: perda por espraiamento
2 α R: perda por absorção (da água)
O coeficiente alfa (α) é função da freqüência do ADCP, da temperatura, salinidade e pressão.
E é calculado pela formula 5 (Schulkin e March 1962)
α = [AS ft f2 / (ft2 + f2 ) + Bf2 / ft ] 1- (6,54 * 10 -4 P) (5)
S: salinidade em PSU
A: 2,34 x 10-6 (constante pra processo de relaxamento iônico )
ft: 21,9 x 10[6- 1520/(T+ 273)] (relaxamento da freqüência em kHz: dependente da temperatura)
T: temperatura em graus Celsius
f: freqüência acústica em kHz
B: 3,38 x 10-6 (mecanismo de viscosidade, água pura).
P: pressão em atmosferas ou kg/cm3
A unidade é nepers/metro.
dB/m = 8,86 x nepers/metro
É importante notarmos que α w é um número grande na computação de concentração de sólidos, e que mesmo pequenos erros ao medir a temperatura em particular e a derivação do valor de α w aumentara muito o erro na estimativa da concentração de sedimentos.
Por exemplo, um erro de 10% na determinação de alfa para um ADCP de 1200 kHz em águas a 20 0 C e salinidade 32 ppt dará um erro de 0.8 dB a 10 metros de profundidade e 1,6 dB a 20 mts, isso em termos de estimativa de concentração fornecerá um erro de 20% a 10 mts e 45% a 20 mts.
4.4 Ruídos
Ruídos é qualquer causa física que cause efeitos na intensidade do sinal não sendo micro - partículas em suspensão na água. Quando a intensidade do sinal acústico se aproxima da intensidade do ruído, fica difícil de ler, mesmo as velocidades da água, mais ainda sedimentos.
4.5 Tipos de Ruídos
O ADCP precisa amplificar o retorno dos ecos para poder medir corretamente as mudanças de fase (Phase shift, capitulo Z), ao fazer isto cria um ruído térmico.

O motor principal do barco, geradores no barco, bombas de água etc. criam ruídos chamados por motores.
A água passando na face dos transdutores, bolhas de ar criado pela fricção do casco com a água, ruídos do convés tais como mover objetos. Trepidação do eixo do motor todos estes exemplos são ruídos que podem afetar a leitura de ABS e lido como sedimento.
4.6 Limitações do Instrumento
Os limites superior e inferior da Intensidade do sinal, dos ADCPs asseguram que a relação das medidas utilizadas count e dB é verdadeira, ou seja, 1 count = 0,43 dB.
Em situações de concentração com partículas grandes estas partículas aumentam consideravelmente chegando às vezes a superar os valores de 200-250 counts, invalidando a relação acima.
Quando se propõe a fazer a medição da concentração de sedimentos com ADCPs/ADPs temos que levar em conta todos estes fatores, e precisamos conhecer bem aqueles que afetam a precisão desta medida.
4.7 Fatores Afetando a Precisão
• Precisão ao medir a intensidade do eco (Backscatter)
• Precisão da calibração
• Precisão do processamento para converter Intensidade do backscatter para concentração de sedimento, e nos parâmetros que assumimos neste processamento. P ex. atenuação causada pela água e sedimento
• Precisão em quão verdadeiro é a nossa medida de sedimento, ou seja, o que há na água que não é sedimento que estamos medindo como sedimento. P ex. bolhas de ar, algas.
Não é parte deste curso a medição de sedimento em suspensão com ADCPs, é necessário pelo menos 40 horas aula, portanto não temos a pretensão de termos entrado no tema, mas apenas á nossa intenção enumerar as inúmeras variáveis e cuidados neste tipo de medição.

5. REFERÊNCIAS BIBLIOGRÁFICAS
FILIZOLA, N.P.; GUIMARÃES, V.S.; GUYOT, J.L.”Medição de vazão em grandes rios: Uso do perfilador Doppler acústico de corrente”. In: O Estado das águas no Brasil – 1999: Perspectivas de gestão e informação de recursos hídricos. SIH/ANEEL; SRH/MMA; MME, Brasília: 1999, pg. 197-212.
GAMARO, P.E.M. “ADCP: Problemas ou Solução”. In: Hydrological and Geochemical Processes Larg Scale River Basin. Manaus, 1999.
GAMARO, P.E.M. “Avaliação do teste do uso de um medidor de vazão acústica Doppler para verificar a vazão turbinada da Usina de Itaipu”. In: XVI Simpósio da ABRH. João Pessoa: 2005.
GAMARO, P.E.M. “Avaliação do uso do GPS em medições acústicas Doppler na Itaipu Binacional”. In: XV Simpósio da ABRH. Curitiba: 2003.
GAMARO, P.E.M. “Compensações das vazões medidas com ADCP em seções com fundo móvel”. In: XV Simpósio da ABRH. Curitiba: 2003.
GAMARO, P.E.M. “Operação do ADCP 300kHz com configuração não padronizadas”. In: XIV Simpósio da ABRH. Aracajú: 2001.
GAMARO, P.E.M. “Primeira análise dos métodos para correção ou medição de vazão em seções com fundo móvel”. In: XV Simpósio da ABRH. Curitiba: 2003.
GAMARO, P.E.M. ”Utilização de medidores Dopplers em batimetrias de grandes reservatórios”. In: I APRH. Ciudad del Este: 2005.
GAMARO, P.E.M. “Validação do método de seção por seção com medidores de vazão acustica Doppler, Utilizado para medir seções com fundo móvel”. In XII Simpósio da ABRH. São Paulo 2007.
GAMARO, P.E.M. “Potenciais problemas das medições acústicas de vazão na Amazônia” . In XII Simpósio da ABRH. São Paulo 2007
GARTNER, J. W. “Estimating Suspended Solids Concentrations From Backscatter Intensity Measured by Acoustic Doppler Current Profiler in San Francisco Bay, California”. USGS, 2003.
GORDON, R.L. “Acoustic measurement of a river discharge”. In: Journal of Hydraulic Engineering. American Society of Civil Engineers: 1989, V.115, n° 7, pg. 925-936.
LIPSCOMB, S.W. “Quality assurance plan for discharge measurments using BroadBand acoustic Doppler current profilers”. USGS Open File: 1995, Report 95-701, 12 pg.

MORLOCK, S.E. “Evaluation of Acoustic Doppler Current Profiler Measurements of River Discharge”. USGS, WRI: 1996, Report 95-4218, 37 pg.
MUELLER, D. “Apresentação de Modos de Operação”. USGS Training Courses, 2003.
MUELLER, D. “Introductions to GPS”. USGS Technical Presentations, 2005.
MUELLER, D. “Use of acoustic Doppler instrument for measuring discharge in streams with appreciable sediment transport”. ASCE: 2002.
NORRIS, J.M. “Configuration of Acoustic Profilers for Measurement of Streamflow”. Office of Surface Water: 2001.
OBERG, K.; MUELLER, D. “Processing ADCP Discharge Measurements”. USGS Training Notes: 2003.
RAINVILLE, F., et al. “Case study os precision os GPS differential orrection strategies: influence on ADCP velocity na discharge estimates”. In: Journal os Hydraulic engineering, 2006.
RDInstruments. “Acoustic Doppler current profilers. Principles of operation: a pratical primer”. San Diego: 1989, 36 pg.
RDInstruments. “Winriver User Guide”. San Diego, 2001. Available in: http://www.rdinstruments.com
RDInstruments. “Principles of Operation: A Pratical Primer”. San Diego: 1996.
SPAIN, P. “Understanding ADCP Performance”. RDInstruments Technical Note: 2003.
SIMPSON, M. “Discharge Measurement Using a Broad-Band Acoustic Doppler Current Profiler”. USGS Open File: 2001, Report 01-1.
SIMPSON, M.R.; OLTMANN, R.N. “Discharge – Measurement System Using an Acoustic Doppler Current Profiler with Applications to Large Rivers and Estuaries”. USGS Supply Paper 2395: 1993, 33 pg.
SONTEK. “Acoustic Doppler Profiler (ADPTM) Principles of Operation”. Technical Notes: 2000. Available in: http://www.Sontek.com
SONTEK. “Acoustic Doppler Profiler”. Technical Documentation: 2000.
SONTEK. “ADPs and Maximum Profiling range”. Application Notes: 2000.
SONTEK. “The Sontek ADP – Three vs four beams”. Technical Notes: 2000.
Urick R “Principles of under water sound” 3rd edition Mc Graw Hill

WMO. “Manual on Sediment Management and Measurement”. Operational Hydrology Report no 47,WMO no 948, 2003.
TOPPING, D. J. et al. ”High-Resolution Measurements of Suspended-Sediment Concetration and Grain Size in The Colorado River in Grad Canyon Using a Multi-Frequency Acoustic System”. USGS, 2004.
6. SOBRE O AUTOR
Paulo Everardo Muniz Gamaro é engenheiro civil, formado na Faculdade de Engenharia de Volta Redonda, em 1981. Trabalha na Divisão de Estudos Hidrológicos e Energéticos da Operação de Itaipu desde 1989 quando veio transferido para a implantação e implementação da Rede de Controle Hidrometeorologica de Itaipu. Participou nas medições de teste dos primeiros ADCPs realizadas no Brasil em 1993.
É coordenador e criador do Grupo de estudos Doppler da ABRH, e coordenador da Comissão de Hidrometria da ABRH. Faz parte do Grupo de Estudos dos medidores Acústicos Doppler da USGS - United States Geological Survey. que dita as normas e procedimentos para Medidores Acústicos Doppler. É coordenador e criador da lista de discussão para medidores Doppler no Brasil.
Participou de diversos cursos internacionais como:
• Curso de Operação de Medidores Acústicos Doppler-US Bureau of Reclamation Denver CO – USA;
• Curso Complex Index Velocity Rating da USGS, San Diego CA – USA;
• Estimation os Suspended Solids Concretation Using Acoustics – USGS, Sant Louis, 2007.
Já realizou mais de 5 mil medições de vazão com medidores acústico-doppler tanto em rios nacionais quanto internacionais tais como: medições de vazão com ADPs com GPS acoplados para avaliação dos resultados. Rio Sacramento CA- USA; avaliação de Medidores Horizontais Doppler para uso do cálculo de vazão através da técnica de Velocidade Indexada. Rio Sacramento CA; medição de vazão em pequenos rios utilizando pequenos catamarãs e transmissão dos dados via radio .- Fort Collins CO –USA; medição de vazão com ADPs no estudo de avaliação para instalação de um Argonaut-SL (Medidor Horizontal de velocidades) na saída das turbinas da Hoover Dam rio Colorado AZ –USA; medições de teste com medidores Doppler em Barcos com Controle Remoto no rio Colorado NV –USA. Medição do rio Mississipi com ADP em St Louis-MO
Já apresentou diversos trabalhos em encontros, congressos e simpósios, tanto nacionais como internacionais, tais como:
• “ADCPs Problemas e Soluções” no Congresso Internacional “Hydrological & Geochemical Processes in Large Scale River Basins” -Manaus AM
• “Behavior of ADCPs in Tropical Rivers” no II Hydroacoustics Workshop da USGS – Tampa FL
• “Application of a Argonaut Side Looking Doppler flow meter for measuring discharge on the southern leg of the Paraná river at the entrance of Itaipu’s reservoir” no Hydraulic Measurements Experimental Methods; Estes Park CO -USA

• “Paraná’s River Argonaut SL results” apresentado no “The 8th Conference on Science & Technology”- HoChiMinh Vietnam, trabalho também apresentado a engenheiros na usina de Três Gargantas na China.
• “Using SLs and SWs – New Projects in Itaipu” apresentado no “ II Sontek Doppler Users Conference”; em Orlando-FL USA.
• “A Brazilian experience with Doppler measurements” no Sontek Doppler Users Conference- Las Vegas -NV-USA.
• “Compensação de Vazões medidas com ADCP em seções com Fundo Móvel” e “Avaliação do uso do GPS em medições Acústicas na Itaipu” no XV Simpósio da ABRH Curitiba PR
• “Utilização de um Medidor Doppler Horizontal para medir vazão continuamente na estação de Caiua no rio Paraná”;
• ”Primeira análise dos métodos para correção ou medição de Vazão em seções com Fundo Móvel” .
• “Avaliação do teste do uso de um medidor de vazão Doppler para verificar a vazão turbinada da usina de Itaipu” .
• “Aquisição de dados hidrológicos para os sistemas de informações de Recursos Hídricos Quando começar ? “ no XVI Simpósio Brasileiro de Recursos Hídricos.Novembro 2005.
• “Procedimentos para Avaliar uma Medição Doppler” e “Procedimento Padrão para Garantia de Qualidade das Medições de Descarga Liquida com Equipamentos Acústicos Doppler ADCP e ADP”, apresentado no congresso da Associação Brasileira de Recursos Hídricos – ABRH em 2005, João Pessoa – PB como documento de padronização de procedimentos da Comissão de Hidrometria da ABRH.
É instrutor de diversos cursos, como as edições do Curso Internacional de Medição de descarga líquida em Grandes Rios, o I II e III Curso de medidores de vazão Acústico-Doppler . Foi instrutor no curso de Primeiras Noções de medição de Vazão com medidores Doppler, realizado no I Congresso Paraguaio de Recursos Hídricos.
Atualmente é responsável pelas medições em todos os rios da bacia Incremental de Itaipu, e realiza estudos de operação com os equipamentos de medição de vazão Doppler no Brasil especialmente na Amazônia.
7. AGRADECIMENTOS
Meus profundos e sinceros agradecimentos a equipe de Hidrologia de Campo, da Divisão de Estudos Hidrológicos e Energéticos da Itaipu Binacional, companheiros do dia-a-dia, de incansáveis repetições de medições na busca de erros e acertos em cada atividade.
Aos Companheiros da USGS pela disponibilização de dados e trocas de informações que, sem eles, tornaria muito mais difícil a realização desta apostila.
Ao grande amigo Mauro Silvio Rodrigues pelo incentivo constante em escrever minhas e nossas experiências de campo, para partilhar com todos.
Paulo Everardo Muniz Gamaro