application of graphic lasso in portfolio optimization_yixuan chen & mengxi jiang
TRANSCRIPT

Application of Graphic LASSO in Portfolio
Optimization
Yixuan Chen 158000258
Mengxi Jiang 160005688

Abstract
We used graphical lasso to estimate the precision matrix of stocks in the US stock
market and apply optimization to get portfolio. The graphical lasso is compared with
other estimation methods, sample covariance and shrinkage. And we find graphical
lasso has an excellent performance in the test data.
I. Introduction:
The Least Absolute Shrinkage and Selection Operator is also called LASSO. It is
a regression method that adds a constraint on the OLS in the regression. It makes the
sum of all absolute coefficients less than a tuning parameter t. When t is large, the
constraint may not have any influence on regression. However, by penalizing the
absolute size of the regression coefficients, you may push some of the parameter
estimates to zero when tuning parameter t is small. The smaller t is, the stronger
constraint is.
Graphic lasso is the expansion of lasso. However, it is not used on regression. It is
used to estimate the precision matrix. Shared the same penalized idea with lasso,
graphical lasso needs a constraint on the minimization. When tuning parameter t is
large, the constraint may not have any influence. However, when t is small, some
elements cij in precision matrix C = Σ−1 may be pushed to zero. The precision
matrix will become a sparse matrix. Graphical lasso is usually used to estimate a
sparse inverse covariance matrix. Besides, with the usage of coordinate descent
procedure, graphical lasso is significantly faster.
In past a few years, many scholars did research on the graphical lasso.
Meinshausen and Buhlmann (2006) suggested a simpler method for covariance
selection that can be used for very large Gaussian graphs. Using their method, we can
always estimate the non-zero elements in precision matrix. Besides them, other new
articles proposed different attractive algorithms to execute the Glasso estimation.
Yuan and Lin (2007), Banerjee and others (2007), and Dahl and others (2007) dealt
with maximization with penalized log-likelihood. Specifically, Yuan and Lin (2007)
used l1 penalty on cij, which is like what lasso did in a linear regression. l1 penalty
would push the concentration matrix to be sparse and then estimated this sparse
matrix. On the foundation of previous researches, Friedman, Hastie and Tibshirani
(2008) proposed another method to do the graphical lasso. the blockwise coordinate
descent approach is involved here in order to make calculation faster and at same time
explain the "conceptual gap". Besides, witten, Friedman and Simon (2011) presented
a condition for getting a related element in graphical lasso. The condition often was
neglected before.
In our project, the algorithm we use is the algorithm Yuan and Li proposed in
2007. The reason we use it over others is that it is sampler, faster and more efficient.
Their algorithm combines the positive definite constraint and the application of
likelihood. At present, most of the research on lasso is not on the field of finance.
Hence we try to apply graphical lasso to find the concentration matrix estimator Σ−1
and make the setting of portfolio optimization good. After we get the performance of
graphical lasso in portfolio, we try to find trading strategy and make money.
We want to estimate the concentration matrix C = Σ−1. Then use C to optimize
portfolio. The interesting part here is that we try to identify some part in C as zero.
II. Technical Description
We assume X = (X1, X2, … , Xn) is a n-dimensional random vector. X follows a
multivariate normal distribution Ν(μ, Σ) . μ is the mean, Σ is the a covariance
matrix. If we have a random sample x = (x1, x2, … , xn), and we want to do estimation
of the concentration matrix C = Σ−1. The elements in the concentration matrix is cij.
If some cij = 0, it means there is conditional independency between Xi and Xj
when other variables are given.
2.1 The reason why we estimate precision matrix
Graphical lasso is used to estimate the precision matrix instead of covariance
matrix. When we estimated the true covariance matrix of a stock market, the data is
every large. If we just estimate the covariance matrix directly, it is not easy and not
efficient. And we cannot push the elements in the covariance matrix to zero, which
means covariance matrix cannot be sparse in real stock market. This is because there
are no two independent stocks in real world.
However, if we estimate precision matrix instead of covariance matrix, we can
overcome these problems above. The elements in precision matrix can be pushed to
zero. When element 𝑐𝑖𝑗 = 0, the stocki and stockj are conditional independent.
That make sense. Besides, when data is large, we can decrease the number of
elements we need to estimate by pushing some to zero. It makes our estimation much
more sampler and faster. Therefore, it is a good move to estimate the precision matrix
instead of covariance matrix.
2.2 Computation of Graphical Lasso
the largest likelihood estimator of (μ, Σ) is (X, A), where
�� =1
𝑛∑(𝑋𝑖 − ��)(𝑋𝑖 − ��)′
𝑛
𝑖=1
Because our matrix should be sparse, in order to get a better estimation, we add a
constraint to the minimization:

min − log|C| +1
n∑(Xi − μ)C(Xi − μ)′
n
i=1
𝑠𝑢𝑏𝑗𝑒𝑐𝑡 𝑡𝑜 ∑|𝑐𝑖𝑗|
𝑖≠𝑗
≤ 𝑡
where t is a tuning parameter.
If sample observations are centered, µ=0. The minimization above becomes:
min − log|𝐶| +1
𝑛∑ 𝑋𝑖𝐶𝑋𝑖
′
𝑛
𝑖=1
𝑠𝑢𝑏𝑗𝑒𝑐𝑡 𝑡𝑜 ∑|𝑐𝑖𝑗|
𝑖≠𝑗
≤ 𝑡
Where 1
n∑ XiCXi
′ni=1 can be expressed as tr(CA). In order to solve the minimization,
we transform it as Lagrangian form:
− log|𝐶| + 𝑡𝑟(𝐶��) + 𝜆 ∑|𝑐𝑖𝑗|
𝑖≠𝑗
Here, λ is the tuning parameter.
2.3 Computation of Tuning Parameter
Tuning parameter is an important procedure in calculation of graphical lasso. It
decides the extent of sparsity of the concentration matrix. Therefore, we need to
choose an optimal tuning parameter λ∗. Here are two criterion of checking if λ is
good.
𝐵𝐼𝐶(𝑡) = − log|��(𝑡)| + 𝑡𝑟(��(𝑡)��) +log 𝑛
𝑛∑ ��𝑖𝑗(𝑡)
𝑖≤𝑗
where eij = 0 if cij = 0, and eij = 1 otherwise.
𝐾𝐿 == − log|��| + 𝑡𝑟(��Σ) − (− log|Σ−1| + 𝑝)
where p is the number of matrix dimension.
KL is called Kullback-Leibler loss. It measures the true distance between the true
precision matrix Σ−1 and the estimator C. The smaller the distance is, the better
tuning parameter λ is. BIC(t) is a approach to the true distance between the true
precision matrix Σ−1 and the estimator C.
We try λ from 0.01 to 0.99. Calculate every KL or BIC with every λ. And then
we take the one with minimum BIC or KL.

III. Simulation
We tried the eight different models in the paper of Yuan & Min in our simulation.
Among these models, there are both data with sparse and dense precision matrix.
Model 1. Heterogeneous model with ∑= diag(1,2,..., n).
Model 2. An AR(1) model with cii = 1 and ci,i−1 = ci−1,i = 0.5.
Model 3. An AR(2) model with cii = 1, ci,i−1 = ci−1,i = 0.5 and ci,i−2 = ci−2,i = 0.25.
Model 4. An AR(3)model with cii = 1, ci,i−1 = ci−1,i = 0.4 and ci,i−2 = ci−2,i = ci,i−3 =ci−3,i =
0.2.
Model 5. An AR(4) model with cii = 1, ci,i−1 = ci−1,i = 0.4, ci,i−2 = ci−2,i = ci,i−3 =ci−3,i = 0.2
and ci,i−4 = ci−4,i = 0.1.
Model 6. Full model with cij= 2 if i= j and cij= 1 otherwise.
Model 7. Star model with every node connected to the first node, with cii = 1,
c1,i= ci,1 = 0.2 and cij= 0 otherwise.
Model 8. Circle model with cii = 1, ci,i−1 = ci−1,i = 0.5 and c1n = cn1 = 0.4.
For each model, we generated sample data with the size n = 1000 and dimension
p = 15, then we use Glasso to estimate the precision matrix. We use the inverse of
estimated precision matrix, that is, the estimated covariance matrix in the portfolio
optimization to find the global minimum variance and the optimal portfolio
considering return. The “portfolio optimization” here in the simulation takes the 15
sets of data in each model as 15 component stocks. And there are 1000 daily returns
data for each of them. For the global minimum variance optimization, we try find a
portfolio weight to minimize the variance of the portfolio,
𝑎𝑟𝑔𝑚𝑖𝑛 𝜔𝑇Σ𝜔,
∑ 𝜔𝑖 = 1𝑖 .
For the optimization considering return, we add a target return ρto the portfolio,
𝑎𝑟𝑔𝑚𝑖𝑛 𝜔𝑇𝛴𝜔,
𝜔𝑇𝜇 = 𝜌,
∑ 𝜔𝑖 = 1𝑖 . We use the Lagrange multiplier and change the optimization objective,
𝑎𝑟𝑔𝑚𝑖𝑛 𝜔𝑇𝛴𝜔 − 𝜆(𝜔𝑇𝜇 − 𝜌) ,
∑ 𝜔𝑖 = 1𝑖 .
μ is the return of each portfolio component. There are two unknown parameter in
the optimization objective, the covariance matrix and mean of component stocks, Σ
and μ . To estimate the ω thatoptimizes the portfolio, we use the estimated
covariance matrix and sample mean in the optimization.
𝑎𝑟𝑔𝑚𝑖𝑛 𝜔𝑇��𝜔 − 𝜆(𝜔𝑇�� − 𝜌) ,

∑ 𝜔𝑖 = 1𝑖 .
Therefore, we get ω from this optimization. The solution of this optimization is,
𝜔 = 1
2��−1��𝜆 ,
𝜆 = −2𝜌��−1��(��𝑇)−1
As we can see, λ is determined by different return target we set to the portfolio.
Since we do not actually have a specific return target, we assume λ = 1 in the
optimization objective without the loss of generality to the convenience of
computation and comparison. Therefore, the optimization of portfolio considering
return turns out finally to be,
𝑎𝑟𝑔𝑚𝑖𝑛 𝜔𝑇��𝜔 − 𝜔𝑇��,
∑ 𝜔𝑖 = 1𝑖 .
The objective is intuitive in the way that it balances the goal of a small variance
and a large return.
We use the optimized component weights and a different test dataset generated by
the same model to simulate the prediction. We compare the results of both the train
dataset and the test dataset using Glasso estimator with two other estimators of
covariance matrix, the sample covariance and the shrinkage estimator. The Glasso
estimator and shrinkage estimator were obtained using the “glasso” and “corpcor”
package from R. The glasso method in R asks for the tuning parameter lambda when
it is used to do the estimation. As we mentioned above, there are two different
criterions to evaluate the estimator, BIC and KL-loss. In the simulation, we use the
KL-loss to select the appropriate tuning parameter λ for each model. Because BIC
depends on the information of sample data (sample covariance) and is actually an
approximate estimate of KL loss. Since we use generated data with known Σ in the
simulation, KL loss is applicable and thus a more accurate criterion. In other words,
KL is the measure of the true distance between estimator and true value, while BIC is
an approximant to the true distance.
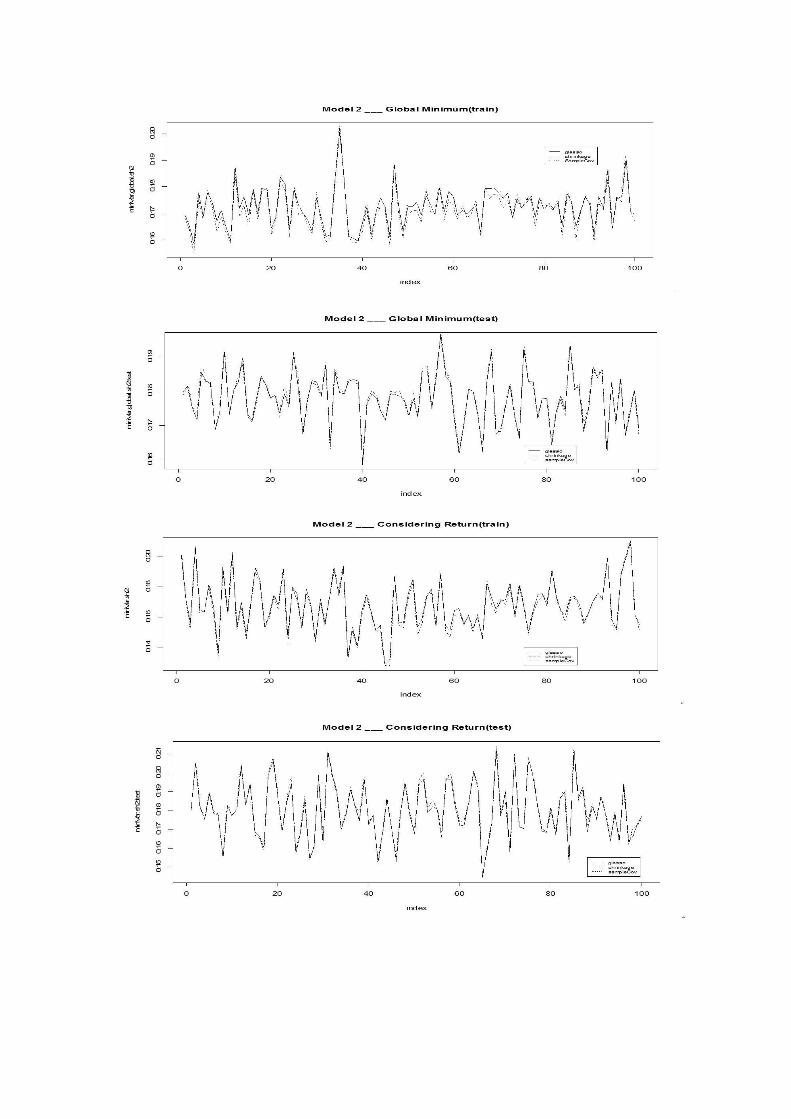
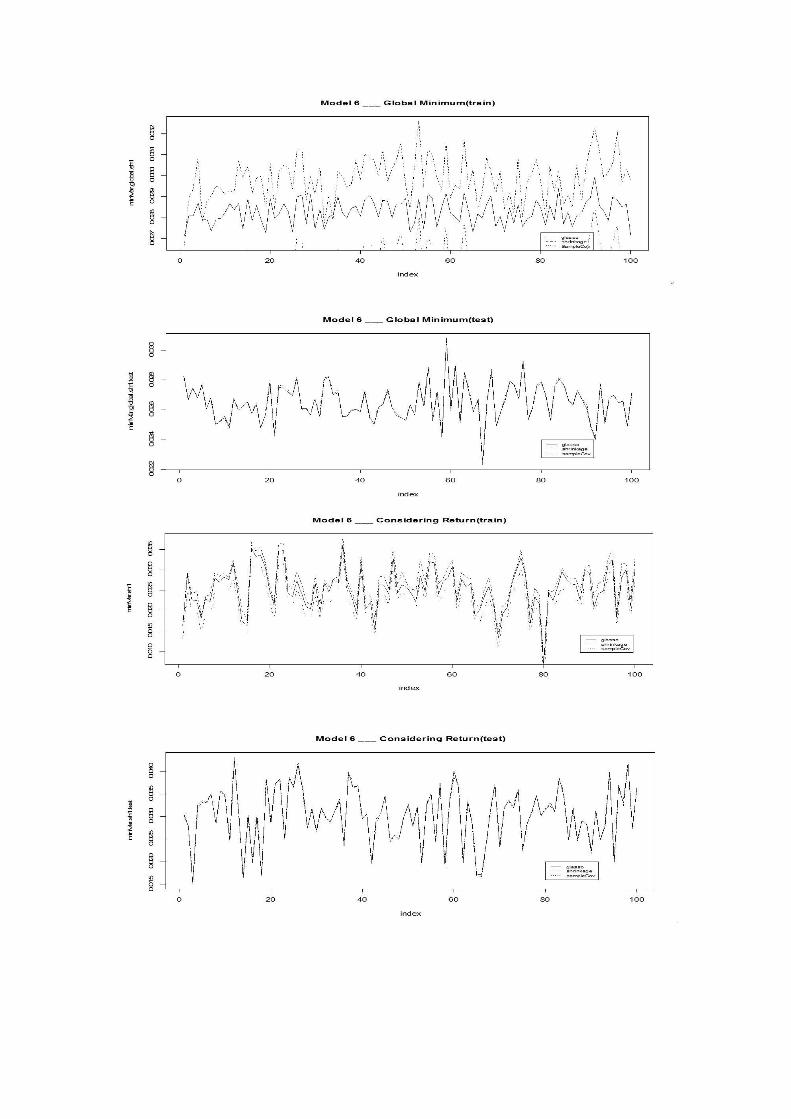
As shown in Figure 1-4, these are comparison of optimization result for Model 31.
The sample covariance gets the best performance in the train dataset of both the two
optimization while the Glasso estimator gets the best performance in the test dataset.
This is actually a desirable result since the goodness of the estimated covariance
matrix should be judged by how it performs to get a portfolio weight structure that
can gain more than others when applied to future data. What’s more, it is reasonable
to find that the sample covariance performs the best in the train data because the
sample covariance is the true covariance matrix for the train data.
1Figures for other models can be found in the appendixes

Figure 1
Figure 2
Figure 3
Figure 4
To see the significance that the Glasso performs better than the other estimators in
test data, we use t-test to exam the portfolio optimization result of Glasso estimator
compared with the other two estimator separately. The t-test’s null hypothesis is that

the optimized result of Glasso equals to that of sample covariance and shrinkage
estimator. And the alternative hypothesis is that the result of Glasso is smaller than the
others. As shown in Table 1, Glasso’s advantage over the other two estimators is most
significant in Model 3,4 and 8. Another important fact we should notice in the table is
that sample covariance is not significantly worse than Glasso only in model 7 which is
the full model where element variables is highly correlated with each other. This
corresponds with the theory that Glasso performs better in data with a sparse precision
matrix.
Global minimum variance Optimization considering return
Sample
covariance
Shrinkage
estimator
Sample
covariance
Shrinkage
estimator
Model 1 7.529993e-16 1 2.190922e-08 1
Model 2 2.101272e-25 0.3208471 9.987082e-22 0.2344433
Model 3 1.001844e-22 5.520879e-17 6.237072e-09 0.02483197
Model 4 7.915417e-19 7.118669e-08 1.788595e-12 0.01158764
Model 5 8.280318e-21 0.6967956 1.226117e-06 0.9867212
Model 6 6.868502e-16 0.05461308 1.04845e-05 0.9993311
Model 7 0.9766911 3.561808e-06 0.4037951 8.45485e-05
Model 8 1.891239e-24 5.771165e-24 2.622082e-10 2.007245e-05
Table 1. p-value of t-test
IV. Real World Examples
We consider two simple real world datasets. The component stocks return of DJI
and NASDAQ 100. The first datasets contains 30 component stocks and the second
datasets contains 85 component stocks2. We choose the daily data from 2010 to 2012
as the train data and that from 2013 as the test data. So there are 754 samples in the
train data and 252 samples in the test data. We use the holding period return because it
is assumed to approximately follow a normal distribution and is more stable than the
stock price. The HPR contains the dividend which also reduces the large jumping in
the data. To choose the tuning parameterλwhen using Glasso, we use BIC as the
criterion here in the real data due to the unavailability of true covariance matrix.
However, just apply Glasso to sample covariance of the return might not work
well. Because the precision matrix of the return is not necessarily sparse. We might
assume that the residual of the return using a factor model should have a sparse
precision matrix. So we apply the Fama-French model to the stock return and estimate
the covariance matrix separately. All component stocks are affected by the
Fama-French model. So the covariance between them can be partly explained by FF
model. The remaining part comes from the internal relationships between themselves.
In order to optimize the portfolio while the Fama-French factor keeps fluctuating, we
need to separate these two correlations.
2 The actual amount of components of NASDAQ 100 is 103. Here we filtered the some of the stocks due to the unavailability of data in the time periods we choose to study.

X𝑖 = 𝛽𝑖𝐹 + 𝜀𝑖,
cov(X) = 𝑐𝑜𝑣(𝑋1, 𝑋2, … , 𝑋𝑛),
𝑐𝑜𝑣(𝑋𝑖 , 𝑋𝑗) = 𝑐𝑜𝑣(𝛽𝑖𝐹 + 𝜀𝑖 , 𝛽𝑗𝐹 + 𝜀𝑗) = 𝑐𝑜𝑣(𝛽𝑖𝐹, 𝛽𝑗𝐹) + 𝑐𝑜𝑣(𝜀𝑖 , 𝜀𝑗)
Xi is the HPR of each component stocks, F is the four Fama-French model factors
and εi is the residual. We use the Fama-French model to separate the original data
into two parts, the Fama-French factor model data and the cleaned data. Then we use
the three methods to estimate the covariance matrix of the two parts separately and
add them up to get the estimated covariance matrix of the original data. This is
theoretical supported because the factor and residual is assumed to be independent in
the linear regression model.
Sample
Covariance
Glasso
Estimate
Shrinkage
Estimate
Global minimum variance (train) 3.89 x 10-05 1.37 x 10-05 4.2 x 10-05
Global minimum variance (test) 5.20 x 10-05 3.91 x10-05 5.08 x 10-05
Minimum objective considering return
(train)
-5.07 x 10-03 -1.89 x 10-03 -5 x 10-03
Minimum variance(train) 4.78 x 10-03 6.46 x 10-04 4.65 x 10-03
Minimum objective considering return
(test)
9.08 x 10-03 8.73 x 10-04 8.47 x 10-03
Minimum variance(test) 4.68 x 10-03 3.72 x 10-04 4.45 x 10-03
Return -4.39 x 10-03 1.25 x 10-03 -4.02 x 10-03
Table 2. DJI_independent model
Sample
Covariance
Glasso
Estimate
Shrinkage
Estimate
Global minimum variance (train) 3.89 x 10 -05 2.11 x 10 -05 3.99 x 10 -05
Global minimum variance (test) 5.20 x 10 -05 3.69 x 10 -05 5.05 x 10 -05
Minimum objective considering return
(train)
3.89 x 10 -05 2.11 x 10 -05 3.99 x 10 -05
Minimum variance(train) 3.89 x 10 -05 7.18 x 10 -05 3.92 x 10 -05
Minimum objective considering return
(test)
-4.96 x 10 -04 -9.56 x 10 -04 -5.02 x 10 -04
Minimum variance(test) 5.20 x 10 -05 3.69 x 10 -05 5.06 x 10 -05
Return(test) 5.48 x 10-04 9.94 x 10-04 5.53 x 10-04
Table 3. DIJ_Fama-French mode
Sample
Covariance
Glasso
Estimate
Shrinkage
Estimate
Global minimum variance (train) 8.20 x 10-05 2.19 x 10-05 9.2 x 10-05
Global minimum variance (test) 7.33 x 10-05 6.58 x10-05 7.34 x 10-05
Minimum objective considering return -8.59 x 10-03 -3.69 x 10-03 -8.61 x 10-03

(train)
Minimum variance(train) 8.23 x 10-03 1.74 x 10-03 8.31 x 10-03
Minimum objective considering return
(test)
1.68 x 10-02 2.46 x 10-03 1.67 x 10-02
Minimum variance(test) 6.85 x 10-03 1.24 x 10-03 6.83 x 10-03
Return -9.98 x 10-03 -1.22 x 10-03 -9.90 x 10-03
Table 4. NASDAQ_independent model
Sample
Covariance
Glasso
Estimate
Shrinkage
Estimate
Global minimum variance (train) 8.20 x 10 -05 24.99 x 10 -05 8.84 x 10 -05
Global minimum variance (test) 7.33 x 10 -05 5.98 x 10 -05 7.16 x 10 -05
Minimum objective considering return
(train)
8.20 x 10 -05 4.99 x 10 -05 8.84 x 10 -05
Minimum variance(train) 8.08 x 10 -03 1.72 x 10 -03 4.05 x 10 -03
Minimum objective considering return
(test)
-1.25 x 10 -05 -1.18 x 10 -05 -1.17 x 10 -05
Minimum variance(test) 7.33 x 10 -05 5.98 x 10 -05 7.16 x 10 -05
Return(test) 1.33 x 10-03 1.25 x 10-03 1.25 x 10-03
Table 5. NASDAQ_Fama-French model
As shown in the Table 2-5, using the Glasso estimator, we get the best
portfolio with the smallest variance and the largest return in the test data of both DJI
and NASDAQ component stock returns. What’s more, we get even smaller variance
in the Fama-French model compared with the independent model. For DJI, the
optimal portfolio with Fama-French model has a variance of 3.69 x 10 -05, which is
10 times smaller than that with the independent model 3.72 x 10-04. For NASDAQ,
the improvement is more significant, the variance is reduced from 1.24 x 10-03 to
5.98 x 10 -05 while the return is also increased.
V. Conclusion
Through the simulation and real data application above, we find that Graphical
LASSO performs well in the application to the portfolio optimization. And using a
factor model like Fama-French model can improve the result of portfolio optimization
significantly. Therefore, it is a useful and practical method to apply in practice to get
the estimate of stock return’s covariance matrix and do the optimization.
VI. Problems and Future plan
When applying Glasso to real data using Fama-French model in this paper, we
estimate 𝑋 − 𝛽𝐹 directly. This may cause a problem of getting a not positive definite
estimate. What’s more, just adding the two estimated covariance matrix up does not
utilize the significance of Glasso, that is estimating a sparse precision matrix.

Therefore, we plan to redo the Fama-French model using Woodbury Formula,
Following the formula, the precision matrix of return should be
Σ−1 = (Σ0 + 𝛽Ψ𝛽𝑇)−1 = Σ0−1 − Σ0
−1𝛽(Ψ−1 + 𝛽𝑇Σ0−1𝛽)𝛽𝑇Σ0
−1
Ψ−1 is the precision matrix of Fama-French factors, Σ0−1 is the precision
matrix of the residual. In this way, we might expect a better estimate and
guarantee the estimated covariance matrix to be positive definite.
Reference
Yuan, M., and Lin, Y. (2007), “Model Selection and Estimation in the Gaussian Graphical Model,”
Biometrika, 94, 19–35. [893,897]
Banerjee, O., El Ghaoui, L. E., and D’Aspremont, A. (2008), “Model Selection Through Sparse
Maximum Likelihood Estimation for Multivariate Gaussian or Binary Data,” Journal of Machine
Learning Research, 9,485–516. [893,895]
Friedman, J., Hastie, T., and Tibshirani, R. (2007), “Sparse Inverse Covariance Estimation With the
Graphical Lasso,” Biostatistics, 9, 432–441. [893,895,897]
Meinshausen, N., and Bühlmann, P. (2006), “High-Dimensional Graphs and Variable Selection With
the Lasso,” The Annals of Statistics, 34, 1436–1462. [897,898]
Tibshirani, R. (1996), “Regression Shrinkage and Selection via the Lasso,” Journal of the Royal
Statistical Society, Ser. B, 58, 267–288. [893]
Daniela M. Witten, Jerome H. Friedman, and Noah Simon(2011), "New Insight and Faster
computations for the Graphical Lasso", Journal of Computational and Graphical Statistics, 892-900
Max A. Woodbury, Inverting modified matrices, Memorandum Rept. 42, Statistical Research Group,
Princeton University, Princeton, NJ, 1950, 4pp MR 38136
Max A. Woodbury, The Stability of Out-Input Matrices. Chicago, Ill., 1949. 5 pp. MR 32564

Appendix