appunti di geometria delle masse - univpm.it · teorema di huyghens 8. trasformazione del momenta...
TRANSCRIPT

Lando Mentrasti
DACS - Dipartimento di Architettura, Costruzioni e Strutture Facolta di Ingegneria - Universita Politecnica delle Marche
APPUNTI DI
GEOMETRIA DELLE MASSE
Versione web della Terza Edizione 1987 www.univpm.it Ancona 2008

Prima editio web. 2008 Proprietas scriptoris © Lando Mentrasti Omnia proprietatis iura reservantur et vindicantur. Imitatio prohibita sine auctoris permissione. Non licet pecuniam expetere pro aliquo, quod partem horum verborum continet; liber pro omnibus semper gratuitus erat et manet. Gratis accepistis, gratis date (Mt 10:8) First Web edition 2008 Copyright © Lando Mentrasti, All rights reserved. Commercial reproduction, commercial distribution and commercial use, in whole or in part, is not allowed without the written consent of the copyright owner. You are not allowed to charge money for anything containing any part of this text; it was and remains free for everybody to read, to print for personal use, and to store and distribute electronically in unmodified form.
Dati della pubblicazione originale Lando Mentrasti Istituto di Scienza e Tecnica delle Costruzioni Facoltà di Ingegneria - Università di Ancona APPUNTI DI GEOMETRIA DELLE MASSE GRUPPO EDITORIALE CUSL Cooperativa Universitaria Studio e Lavoro Ancona - Terza Edizione 1987

INDICE
CONCETTI INTRODUTTIVI
1. Sistemi di masse
2. Momenta statico
3. Centro di massa
4. Momenta d'inerzia assiale
5. Momenta d'inerzia polare
6. Momenta centrifugo
7. Teorema di Huyghens
8. Trasformazione del momenta centrifugo
9. Trasformazione del momenta polare
TENSORE D'INERZIA
10. Trasformazione di coordinate per rotazione
11. Trasformazione dei momenti statici
12. La matrice dei momenti d'inerzia
13. Trasformazione dei momenti d'inerzia
14. Espressione tensoriale del momenta d'inerzia
DIREZIONI E MOMENTI PRINCIPALI D'INERZIA
15. Problema di massimo e minima
16. Problema di autovalori
17. CirGolo di Mohr
18. 11 circolo di Mohr in un SR non-principale
19. Rappresentazione grafica delle direzioni principali
SISTEMA ANTIPOLARE
20. Centro relativo
21. Teorema fondamentale - Polarita
22. Involuzione delle rette e dei punti coniugati
23. Ellisse centrale d'inerzia
24. Costruzioni notevoli
25. Nocciolo centrale d'inerzia
APPENDICE
BIBLIOGRAFIA
1
2
3
8
10
10
13
14
15
17
23
27
29
32
36
42
44
49
54
56
60
64
66
72
74


-1-CONCETTI INTRODUTTIVI
1 • SISTEMI DI MASSE
Si parla di sistema di massa (SM) quando si fa riferimento ad
una assegnata distribuzione (piana), geometricamente determinata,di
una grandezza scalare chiamata massa (campo scalare) (Fig.1).
Esempi di "masse" sono l'area (L2) ,densi ta x area (M), momenta
statico ecc •
••••
Fig.1
Le masse possono essere distribuite in modo continuo 0 concen-
trato.
Di solito il SM viene descritto per mezzo di un sistema di ri
ferimento (SR) ad assi rettilinei, ortogonali 0 no.
In questo ultimo caso le distanze di un punto dagli assi pos-
sono essere prese sia parallelamente agli assi,e verranno indicate
con x e y, oppure possono essere misurate ortogonalmente agli assi;
in tal caso verranno indicate con la notazione x~e ~
Dalla fig.1 si ricavano le relazioni che legano le due coppie
di coordinate :
x.t=x sen cL (1)

(2)
-2-
Y.1= Y sen ol,
ove oL e l'angolo «]'C) tra gli assi.
Si osservi che le (1) e le (2) non sono le leggi di trasforma-
zione dal SR ad assi non ortogonali a quello ad assi ortogonali;ven-
gono soltanto messi in relazione i due modi di misurare le coordi-
nate nel SR non ortogonale.
2 . MOMENTa STATICO
Si definisce momenta statico S~ del SM rispetto ad una retta
r la somma dei prodotti delle masse per le rispettive distanze da
r, distanze misurate secondo la direzione t(*~.
Se scegliamo r=x e t~y si PUQ scrivere
Sx : f y d.fff\r
')y(,
5y ;;:f X do f\'V\,
rrt.
(3)
(4)
ove l'integrale esteso a tutta la distribuzione di masse ~ deve es
sere sostituito dalla sommatoria nel caso di masse concentrate.
Se si misurano le distanze ortogonalmente agli assi la legge
di trasformazione dei momenti statici si PUQ ottenere sostituendo
nella definizione di SXlla (2):
Sx /:: i Y.l ct IV\\. c SI ~Im Ii dvM\,::: $" &\M. Ql. •
10C (l)t
Analogamente per Sy~ cosicche si PUQ concludere
SX.l= Sx sencL
S>,1 = Sy senoe. (5)
Si osservi che i momenti statici S~ sono minori (0 uguali) ri
spetto ad S.

-3-
3 . CENTRO DI MASSA
11 centro di massa(CM) di un SM e il punto notevole del piano
definito dalle seguenti proprieta:
assegnata una retta qualsiasi r, il momento statico del SM ,S~,
pUG essere valutato come prodotto della massa totale M=JJ~ per ladistanza del CM da r. ~
In altre parole per il calcolo di SR e possibile considerare
il SM equivalente ad una sola massa M concentrata nel Centro di
Massa.
Dalla definizione , indicate con t le distanze da r,
(5)
segue il calcolo delle coordinate del CM rispetto ad SR assegnato:
XCI'! =51 ~
-~ J >< J M0-MM(((C
(eM. =
Sx
-' J jd,rrn.,M
-
Mrrrcottenibili dalla (5)
per'0=-7t=x(6)
(7)
e z=)( t=-7 ' rispettivamente.
-..... "'\
\\
\
\
I'\
II
/./
/
.--1.//
//
/
I
\. 'Ytt1\\'- . -
..•... --.•.•••..•...... ---
Fig. 2 Fig. a

-4-
La Fig.2 mostra che la posizione del CM e indipendente dal mo-
do di misurare le coordinate.
Si puo anche mostrare che la posizione di CM e indipendente dal
SR.
Se le masse sono aree il CM viene usualmente chiamato baricen-
tro ed indicato con la lettera G.
Osservazioni:
a) il momenta statico del SM rispetto ad una retta baricentrica ro
e nullo:
(M~ 7;0 :> 5'00 = J t J(YM., = tCM. f1 = 01'1 =. O.('()(;
b) il momenta statico di un SM puo essere valutato come somma dei
momenti statici delle masse componenti:
Sit; = J -t olMol- : tcM, M10f tCM Mz't ... -r t01 11""
rrtG OJ (It- fI'I.,
ove It '"J JM1.-, e rnt~tJ 1Ytz U ...\FDr."", == rryc.!/iC,
c) dividiamo in due parti 11C~ e 'OYez. i1 SM'6R(fig.a)i momenti statici
rispetto ad una retta baricentrica~"delle due porzioni sono
nella seguente relazione
d) presenza simmetria
Si dice che un SM ammette un asse di simmetria (in generale non
ortogonale) Y,quando esiste una retta y e una direzione x tali
che per ogni massa elementare dm distante x dall'asse y, se ne
puo trovare un'altra distante -x dall'asse y e giacente sulla
retta parallela a x passante per la prima massa (fig.b).
In questo caso si ottiene (*)
S'j = J)( d.t'fU =J{n( -x) J~ '" 0({}t triG/l
che per la (6) conduce ad ottenere -x(/>{= 0, ossia
il CM di un SM che ammette un asse di simmetria (non ortogonale)
appartiene a tale asse.
(*) Per ogni contributo positivo ne esiste uno negativo.
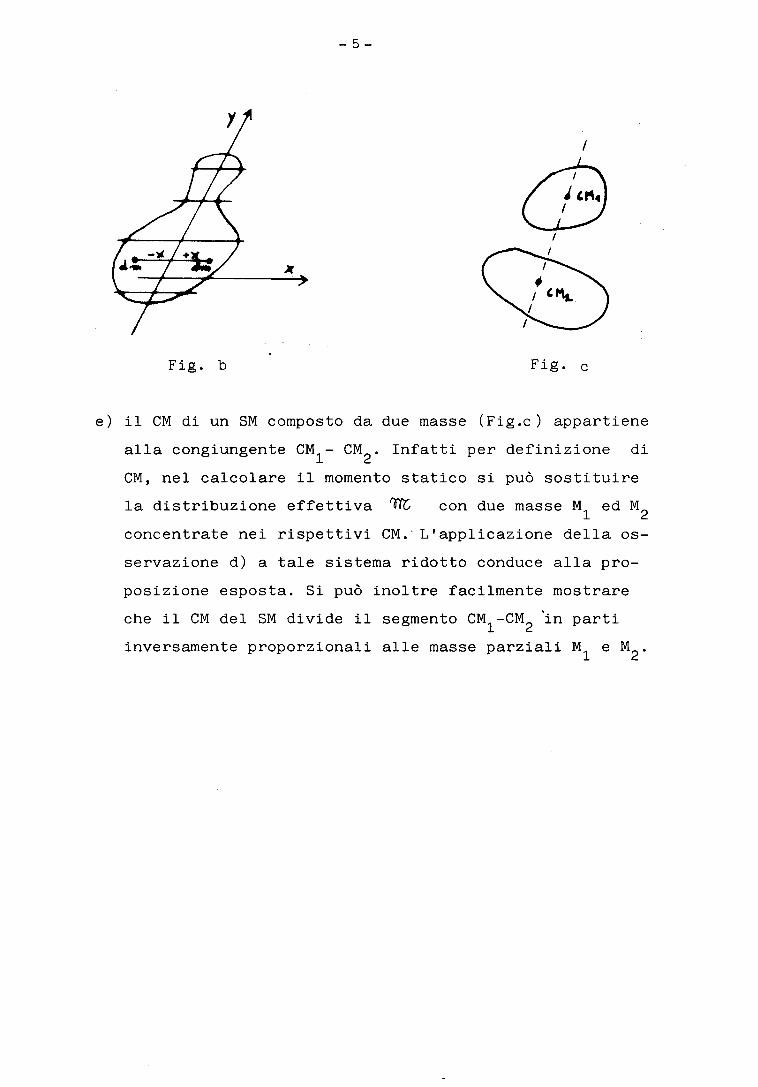
Fig. b
-5-
Fig. c
e) il CM di un SM composto da due masse (Fig.c) appartiene
alia congiungente CM1- CM2. Infatti per definizione di
CM, nel calcolare il momento statico si PUQ sostituire
la distribuzione effettiva ~ con due masse M1 ed M2
concentrate nei rispettivi CM.' L'applicazione delia os
servazione d) a tale sistema ridotto conduce alia pro
posizione esposta. Si puo inoltre facilmente mostrare
che il CM del SM divide il segmento CM1-CM2 )n parti
inversamente proporzionali aile masse parziali M1 e M2.

-6-
Costruzioni grafiche
E' utile,nelle applicazioni, ricorrere a metodi grafi
ci per la determinazione del Centro di Massa di un SM. Si
consideri, ad esempio, la massa concentrata di Fig. 3a.
Tracciando per m una retta r parallela all'asse x sul
la Quale stacchiamo un segmento proporzionale ad m (se
condo una scala scelta a piacere), possiamo interpretare
il momenta statico delIa massa elementare come momento del
vettore fY'I\. (*).
M
a)
x
Fig. 3
b)
(*) Nel caso generale interpretiamo la distribuzione mt
come campo di vettori proporzionali aIle masse element~
ri dei quali determiniamo graficamente la posizione del
la risultante tramite il poligono funicolare.

-7-
A tal fine scegliamo un punta qualunque P del piano che chiamia
mo Polo del Poligono delle Forze e riportiamo a distanza H da
esso il vettore ~ proiettiamo ~ da P a mezzo delle rette
a e b (Fig. 3b). Costruiamo il poligono funicolare per M (punto
arbitrario della retta r) tracciando le rette a' e b' parallele
alle proiettanti di ~ , a e b. Per la similitudine dei trian
goli OlP e MBA segue, a meno della scala delle masse, BAit'" rm- /H
ovvero
H· BA = fM. '( =- S)< .
Tale risultato e interpretabile come segue: il momento statico
della massa m rispetto alla retta x (generica di un fascio diret
te parallele) e misurato dal segmento intercettato su x tra il
primo e l'ultimo lato del poligono funicolare. Per quanta ri
guarda il segno basta osservare la convenzione di considerare il
segmento AB posi tivo se la retta x si trova al di sotto della
massa m (ossia a distanza y positiva).
La costruzione precedente e generalizzabile al caso di un
numero qualunque (finito) di masse elementari; il momenta stati
££ e sempre proporzionale al segmento della retta r intersezione
tra il primo e l'ultimo lato del poligono funicolare (Fig.4).
Una conseguenza della costruzione grafica esposta e che il CM
appartiene alla retta passante per il punta intersezione della
prima e ultima retta del poligono funicolare, perche rispetto a
tale retta ro' parallela a r, il momento statico del 8M e nullo.
Fig. 4
o tYI'l..j -1
x p
2... 3

-8-
4 . MOMENTO DI INERZIA ASSIALE
Si definisce momento di inerzia Jr del SM rispetto alIa retta
r (0 semplicemente momenta di inerzia) la somma dei prodotti delle
masse elementari per il quadrato delle rispettive distanze da r, mi
s'..lratelungo la direzione t (¥= 't ):
(8)
In particolare si possono valutare i momenti di inerzia rispet
to agli assi coordinati:
Jx = J y2 J.,""r"fYc
Jy = S x~ LIYVV.rrIC
(9)
(10)
Se si misurano Ie distanze perpendicolarmente agli assi si ot
tiene un momenta di inerzia Jx~ legato a Jx dalla relazione
JX.l =: Jx ;;'-e.rvv2. oL
e analogamente
(11)
ricavate dalle definizioni e con Ie (1) e (2).
Per analogia con quanta fatto con il momento statico e il eM, si
puo pensare di concentrare tutta la massa M ad una distanza f da r
tale che il momento di inerzia si puo calcolare semplicemente come:
(13)

-9-
La distanza e~definita da
l
J/C.
ft. : 1'1
(14)
e detta raggio d'inerzia del SM rispetto alla retta r.
Sono ovvie le relazioni
\ x.1. ---(15)
Osservazioni:
a) se le masse sono considerate positive allora dalla (8) risul
ta cheilmomento di inerzia e uno scalare essenzialmente posi-
tivo.
b) dalla definizione segue che a parita di M il momento di iner
zia e maggiore per quelle distribuzioni le cui masse sono pi~lon
tane dalla retta r.
c) il momenta di inerzia J~puo anche essere interpretato come mo
mento statico di particolari masse. Per fissare le idee ed evi
tare confusioni supponiamo che il SM sia una distribuzione di
superfici ~ ;allora per definizione
Ju::: S tt J.fN~
ove d~ e l'elemento di area.
Tale relazione puo anche scriversi
J. · J I: t.L •.. < J t .1"", (16)d ~ove d m= t d a = d Sr che e interpretabile come momento statico elemen-
tare dell' area d.,(L rispetto alla retta r.
La (16) afferma che il momento di inerzia di un SM puo essere
anche definito come momenta statico rispetto ad r e dei momenti sta-

-10-
tici elementari (rispetto ad r).
5 . MOMENTO D'INERZIA POLARE
11 momento d'inerzia polare di un SM e definito come somma dei
prodotti delle masse elementari per il quadrate delle distanze da un
punta P detto polo . •In simboli:
(17)
Se il SR e ortogonale e P coincide con l'origine degli assi,
essendo )(~t -t 'I~t = t..l dalla (17) si ottiene
(18)
6 . MOMENTO CENTRIFUGO
Si definisce momento centrifugo Jxy di cui SM rispetto ad una
coppia di assi x e y (Fig.6) la somma dei prodotti delle masse elemen
tari per le distanze dai due assi:
(19)
Fig.6

-11-
La fig.6 e la(i) e la (2) indicano le relazioni per calcolare
il momento centrifugo misurando le distanze ortogonalmente agli assi
(20)
Osservazioni:
a) a differenza del momenta di inerzia assiale, quello centrifugo
PUQ essere anche negativo 0 nullo.
b) se nel calcolo del momento centrifugo si prendono le distanze
da un'unica retta x (misurata lunge y) formalmente si ha:
.Iy X ~ r '/ y d~ = J)(1tL
Le notazioni Jx e Jxx saranno, in seguito, usate indifferen
temente.
c) simmetria
Nel caso in cui il 8M ammette un asse di simmetria (in genera
le non ortogonale) y (cfr. § 3,oss. d) (sia x la retta gene
rica parallelamente alla Quale si misurano le distanze da y)si ottiene
Fig. 7
poiche nell'integrale, per ogni contributo +x (y dm) (Fig.7)
ne esiste certamente uno -x (y dm).

- 12-
d) Con l'osservazione c) del §4 anche J e interpretabilexy
come momento statico di masse elementari che, a loro
volta, sono momenti statici. Per fissare le idee si con
sideri il 8M come una distribuzione di superfici.
Dalla definizione di momento centrifugo
J,y ~ Jxyl", ~)"(/.1,0.,) ~ J x ciS,lA 1h J>
(21)
= J y (x J. ~) ~ J '/ J:Sf' .
ifiv 1A
Le (21) conducono ad interpretare il momento centrifu
go di un 8M rispetto agli assi x ed y come momento
statico rispetto all'asse y dei momenti statici delle
masse elementari rispetto a x; oppure come momento sta
tico rispetto a x dei momenti statici elementari fatti
rispetto a y.

- 13-
TEOREMI DI TRASPOSIZIONE
Si vuol ora rispondere alla questione seguente(*):
come variano i momenti d'inerzia quando si opera una traslazione del
le rette rispetto alle quali vengono calcolati?
7 . TEOREMA DI HUYGHENS
Si consideri dapprima la legge di trasformazione per il momen
to di inerzia assiale ; dalla Fig. 8 segue immediatamente:
,~:= X -+ X..n.'
,Y:= 'I -I- 'IfL'
per cui
(22)
x'
(*) le leggi di trasformazione per traslazione dei momenti stati
ci verranno dati nella forma vettoriale nel § 11.

- 14-
Se accade che X':: X e" baricentrica ( $X =- 0 ), si ottiene:o 0
(23)
essendo '/.1l.':: '/6r' 'Ossia il momenta di inerzia di un SM rispetto ad un asse x e
pari /:f:.quell.a,calc:olatorfspe:tt:'GIad un asse ~6passante per G, paral
lelo a quello assegnato, al Quale va sommato il prodotto della massa
totale per il quadrato della distanza tra le due rette.
Si deve notare esplicitamente che nel caso di massa positiva,
il momenta di inerzia di un SM rispetto ad una retta baricentrica e
il minima tra tutti quelli calcolati rispetto alla generica retta di
un fascio di rette parallele.
8 . TRASFORMAZIONE DEL MOMENTO CENTRIFUGO
La fig.8 e le relazioni (22) conducono a:
,Se si sceglie n;Gr
leggecercata:
si ottiene
(24)
la
che si enuncia dicendo che il momenta di inerzia centrifugo di un SM
rispetto a due rette x eye pari a quello calcolato rispetto a due
rette Xo e Yo parallele a quelle assegnate e passanti per G, al qua
le va sommato il prodotto delle coordinate di G e della massa totale
del SM.

- 15-
9 . TRASFORMAZIONE DEL MOMENTO POLARE
Nel caso di SR ortogonale valendo la (18) e la (23) si PUQ
scrivere (Fig.8)
ossia
Osservazioni:
(25)
a) del teorema di Hyughens si PUQ dare la versione con i raggi di
inerzia. A tal fine basta dividere la (23) per M e ricordare
la definizione (14) ottenendo
(25')
b) se e noto il valore del momento di inerzia rispetto ad una ret
ta xl e si chiede il momento di inerzia rispetto ad una retta
x2,~x1 (entrambe non baricentriche) (Fig.9) non si PUQ appli
care la (24).
Tuttavia si PUQ scrivere il teorema di Hyughens sia per la pr~
ma che per la seconda retta:
S,..~"" Jxo -t- y~;MJ -J 1.11.
xL - Xo T YU;;r
da cui sottraendo
(26)
o anche
(27)

- 16-
Fig.9
FiG. 10

-17 -
IL TENSORE DI INERZIA
In questb capitolo si vogliono generalizzare le leggi di tra
sformazione dei momenti di inerzia includendo il caso di rotazione
del SR.
La trattazione verra condotta nell'ipotesi di sistemi di ri
ferimento cartesiani ORTOGONALI.
Verranno usate sistematicamente le notazioni vettoriali e ma-
triciali di cui si richiamano alcuni risultati in appendice.
10 • TRASFORMAZIONE DI COORDINATE PER ROTAZIONE (*) [~]Ci 81 chiede come variano le c~ordinate del generico punta x= ::allorche ci si riferisce ad un SR l x.j) )(~) X~! ruotato rispet~ 3
to a quello iniziale t >(4) Xl) )(~1 (Fig.10).
Si indicano con xi (scalare) e e. (vettore) rispettivamente
la generica coordinata e il generico versore dell'asse del SR ini
ziale, e c.on. x~ ee'. le corrispondenti gran""
dezze nel SR ruotato.
La relazione fondamentale da cui si parte e
0, in forma compatta,
3
3
ZX· e' Z I ,
:::r
X· e.A, ~ ~= ..• A, ~4'" !
(28)
che esprime la seguente ovvia condizione:
- il vettore posizione del punto P, P -11 , deve essere 10 stesso
sia che si esprimano i suoi componenti (componente • versore ) nel
SR lx~) x.t,.) X~! ' sia che 10 si faccia nel SR lXA~ )(i I x~} •
(*) La trattazione e condotta per un SR nella spazio tridimensio
nale; come caso particolare si ottiene la legge di trasforma
zione per SR piani.

-18-
Per comprendere meglio tale affermazione si aeve ricordare aha
l'''ente''vettore non dipende dal particolare SR che si sceglie per
decriver 1'0.'
Viceversa le componenti (scalari) del vettore dipendono dal SR
scelto.
Il problema e ora estrarre dalla (28) le Xi in funz:ionedelle xi
(ole xi in ,:t-unzlOrie:dj.'cKi).
A tale scopo moltiplichiamo scalarmente per il generico versoI
re E!j del nuovo SR entrambi i membri delle (28)3 ~
'. " I Z I ,e..• L-. X, e. = e· • .>< ' e ·II "AI J ...••~·l ~e,f
portando il prodotto scalare sotto segno di sommatoria si PUQ
scrivere3
L.3
-z ,X.
A
I ,e·ee·j ••Al secondo membro si PUQ semplificare il prodotto e;.e~
osservando che si tratta del prodotto scalare di due versori di un
SR ortonormale, ossia
eJ • el~bkj = f o )(29)
La matrice 6ij(simbolo di Kronecker) ha. le seguenti componenti
(30)
cioe coincide con la matrice unitaria %.
Anche al primo membro i prodotti scalari possono essere inter
pretati come elementi di una matrice Q
. ( e- e~· j (31)

- 19-
ossia la componente Q~j e il prodotto scalare del "nuovo" versore di
indice icon il"vecchio" versore di indice j:,,Ie .•• e.- e.,·e.te..·e,
[ Q;'j] " I e~.e1,,ez' e.t
e.t·@.s I .(32),
,e~·e5e3·e... e3·e.t
Con tali osservazioni la (28) puo anche scriversi
3 3
? QJ'.i X ~ = '? S~J'xl ...( =4 .A ~--I
In termini di prodotto matriciale (riga per colonna), utiliz
zando anche la definizione di matrice unita, la precedente relazione
diventa
Q X ::= I x'
ovvero
l)ll = Q X I (33)
versore del"vecchio" SR, si ottiene:
In maniera analoga moltiplicando scalarmente la (28) per il
generico aj3
eJ. - 2: )(. e· =-. ~ "".•.=~
Z 3 I (*)x~ e· -e,;, ""2. 'Xl e' .8;,
Ad J ; =A j3
3
L X' ~,. = L x~ Q~'. ~ J A
A=-~ I" 4 J.3
J
~ ~j~ X~=!T I
Q j~ X ~-t =1
1=4
(*) Si ricordi che la (31) definisceq ij: e';,. ej ::ej'ei·

ove si e utilizzata la relazione
-2)-
per ottenere al
secondo membro un prodotto matriciale riga per colonna.
Finalmente si ha
ossia
(34)
Osservazioni
a) Ie componenti delIa matrice q defin1ta dalla (32) sono suscet-
tibili d1 una'interpretazione riotevole:
se si esamina la prima riga di Q s1 vede che 1 prodotti scalari ivi,indicati esprimono Ie tre componenti del versore E!t nel SR iniziale:
e: · e .• = (e-1' ){
Analogo fatto risulta per Ie altre righe.
Ossia Ie righe di Q sono i trasposti(*) dei versori del nuovo
SR:
err•••
Q~l e'Tl.e';
Lo anche
qT = [ e~
e'e~ Jz. (35)
(36)
(*) La trasposta di un vettore colonna e un vettore riga.

- 21 -
Da questa espressioni segue immediatamente che il·prodotto ma
triciale
(37)
, , 'T \'(basta ricordare che e~. ej = e" eJ = o"j).
Ma la (37) e anche la definizione di matrice ORTOGONALE,per la
quale cioe vale
(38)
Al medesimo risultato si arrivava invertendo la (33) e confron
tandola con la (34).
b) non appena e assegnato il nuovo SR (cioe sono note le compo-
nenti dei versori dei nuovi assi)e immediatamente possibile
scrivere QPer esempio nel caso piano si ha (Fig.ll)
,e... e..:::0-0$ ~ e'. e :: c,cs (-rc - 0/.) = se:m. rL.• L L
,e1. • e.z = (Os oL
(39)
Fig.ll
cosicche le (33) diventano:
- 22 -
(»~ rX- -+ X1. ~ r:i.-]:::'GcA. tI- + x l (t) ~ ol.
(40)
e le inverse (34):
(,o oS ~ - Xl .s Be.\- oIv]5~ IlL + Xl. LA!) ri (41)

- 23 -
11 . TRASFORMAZIONE DEI MOMENTI STATICI
Verranno ora applicate Ie relazioni di trasformazione delle
coordinate per rotazione del SR al calcolo dei momenti statici,
anzi data la lora semplicita.
anche nel caso di traslazione.
si ricavano Ie relazioni val ide
L'idea fondamentale e quella di sostituire nelle definizioni
delle grandezze inerzial i (funzioni di X) la ~ CUD QT-x' trami te la
(34), ottenendo cosi Ie richieste leggi di trasformazione.
Per far questo occorre esprimere Ie grandezze che interessano
in funzione del vettore X (e non solo delle sue componenti), ossia
scrivere delle relazioni tra vettori.
Nel caso deimomenti statici questo si ottiene facilmente os
servando che
e
denominiamo 8~ vettore momento statico,la grandezza cosi defini-
ta
(5")1 ;: SX,t '" J x-i cl,taI.1ft
. (42)
ossia
(43)
ove l'integrale vettoriale che compare nella (43) significa sempli-
cemente l'integrale delle componenti del vettore che compare come
integrando, come specificato dalle (42); l'apice * indica che non
c'e corrispondenza tra l'indice delle componenti di S* e gli indici
del simboli 5)t, e$ . :(l)1 non e S,X .•1 .X2 . iCon la notazione compatta espressa dalle (43) si e ottenuto il
risultato notevole di scrivere il vettore momenta statico S* (da non
confondere con i momenti statici Sx ed 5y rispetto agli assi, che
sono delle quantita. scalari) in funzione esplicita del vettore XScrivendo in forma vettoriale la trasformazionedi coordinate
per traslazion¢ tradotta dalla (22) (Fig.12)

uX = XA -t x
•XJ.
A
- 24 -
•X~
(44)
Fig.12
ed applicando le relazioni di trasformazione per rotazione del sist~
ma di assi t x;, x; }x; J ' "vecchio", al SR l '><4" x;) x~ J, "nuo
vo", con una relazione analoga alla (34)
II QT,)( =- X ,
la (44) diventa
X ::: X J).' -t Q;-X ' , (45)
che e la relazione di trasformazione delle coordinate di un SR cartesia-
no ortogonale per roto-traslazione.
Se si introduce la (45) nella definizione del vettore momento
statico (43) si ottiene, osservando che X ,..0..:
costanti
e. sono
s" ~JX .1"", ~ jex.-! + QT x') L ••. =rm TfCossia
s" ::.(46)
che in componenti si scrive
s* ==
S'J( =x1.Q' M -+QT *' QT ~,12- H S1. i 12. So 2-
s* ~ 5 ==
XJ..tl..' M .,..QT ~, T *12. >I.~ .2~ 51 .•.Q22:':>2.
(47)

(48)
- 25 -
ovvero, indicato con x l'asse xl e con y l'asse x2 ' secondo le usua
li notazioni
Sy = X..Q' M -/- QI/' S'jr T Q ~ S x'
SX:: Y./1-' -M + Q ~ Sy' -t Q~ 5 x' .
Come si vede dal confronto tra la (47) 0 (48) e la (46), e evi
dente la potenza della notazione matriciale che esprime in modo sem
plice ed esauriente la relazione tra i~ vettori momento statico (43)
in due SR qualsiasi legati dalla (45).
Osservazioni:
a)traslazione del SR
nel caso in cui il SR ~~:Ix;le soltanto traslato rispetto a
quello iniziale (Fig.13) la relazione (46) si semplifica nella
* M~'oS :=. XA! J"J. T S
poiche,nel caso di traslazione,
come e facile verificare.
(49)
La (49) si pu6 enunciare come segue:
il momento statico 5* rispetto ad un sistema di assi~~J~!e ugua-1e al momento statico S*' ca1co1ato rispetto a1 sistema di
b)
.assi ~ )(4' I ')(/1 ,al Quale va aggiunto un contributo X..tl! 11)interp'r-etabilecome momento statico, rispetto al SR ~ '><4J 'Xl ~ ,della
massa totale M pensataconcentrata nella nuova origine.
nel caso particolare in cui JL'E Cf1 allora S*' e nullo
perche le sue componenti sono i momenti statici rispetto ad
assi passanti per i1 CM, cosicche la (46) si riduce a .
o anche(
= 1'1che e la re1azione vettoriale equivalente alle (6) e (7).

- 26 -
Fig.13
c) rotazione del SR
nel caso in cui c I e solo rotazione (Fig .14) del "nuovo" SR (Jl.'~n~la (46) si scrive
s* = QT5*'.Si noti la analogia formale tra questa relazione e la legge
di trasformazione delle coordinate (34) facilmente giustifica
bile se si considera che S~ non e altro che il vettore )( "pes§:
to" dalle masse 'OiL (vedere la definizione (43)).
Fig. 14

- 27 -
12 . LA MATRICE D'INERZIA
Per poter applicare la trasfdrmazione di coordinate
in forma matriciale (34) ancheaimomenti d'inerzia, occorre
(vettore) •in termini di •
generico 8M nella configurazione di fi
gura 15 e una coppia di assi fxi, x21 di versori tift , b} ci pro
poniamo di calcolare il momento d'inerzia J, della distrix
buzione rispetto alla retta xi di versore -n •. <fome da defini2
zione, esprimendo t come modulo del prodotto vettoriale 'Y\ A X,
esprimere J e Jr rsAssegnato il
si puo scrivere
JX-1::. J 1:.' d,M'.. = j(IW\A x}e(lnAx) cL iVVv,
rrtt f'('iL
L'integrando pUG essere trasformato
(50)
ricordando che
G..A(bAc)= a,eC b - a.-h c,
cosicche abbiamo
8e esplicitiamo l'ultimo fattore delle (51) vediamo che e a
gevole porlo sotto forma matriciale come segue:
In questa modo la (51) pUG essere scritta
avendo evidenziato la matrice uni taria nel prodotto X-X~' :)C.xlfWl .
- 28 -
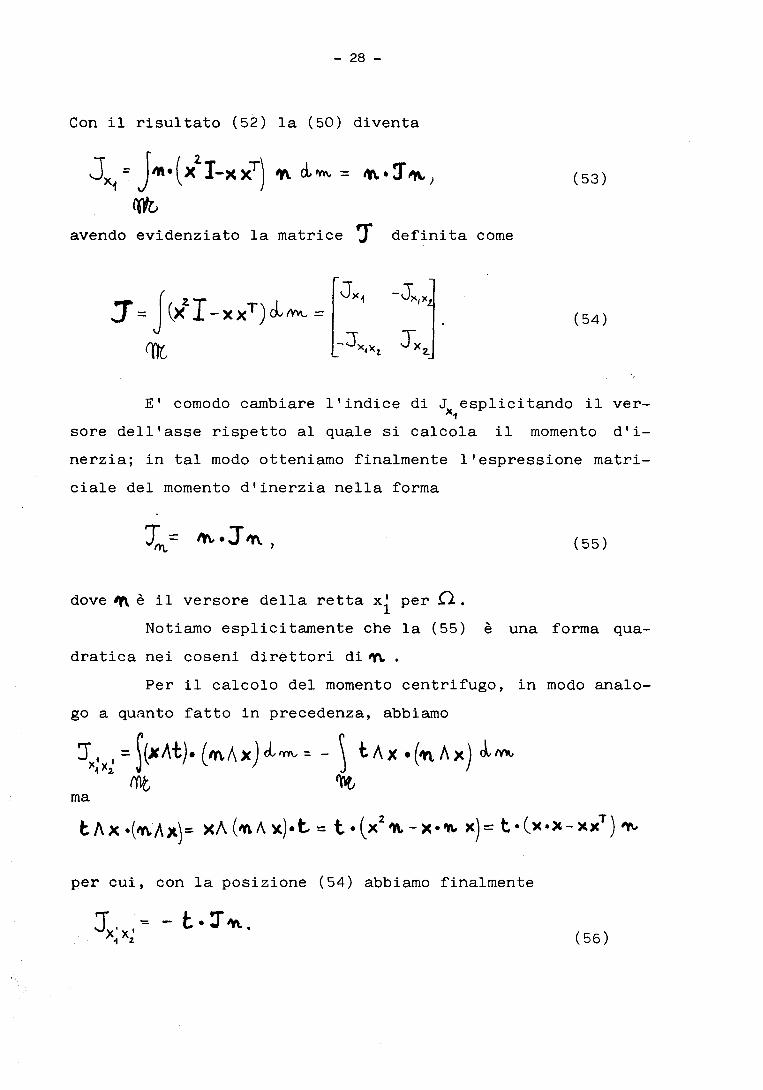
Con il risultato (52) la (50) diventa
(53)
avendo evidenziato la matrice ~ definita come
(54)
E' comodo cambiare l'indice di J esplicitando il ver-~
sore dell'asse rispetto al quale si calcola il momento d'i-
nerzia; in tal modo otteniamo finalmente l'espressione matri
ciale del momento d'inerzia nella forma
(55)
dove", e il versore della retta xi per D.Notiamo esplici tamente che la (55) e una forma qua-
dratica nei coseni direttori di 'Y\.•
Per il calcolo del momento centrifugo, in modo analo
go a quanta fatto in precedenza, abbiamo
ma
per cui, con la posizione (54) abbiamo finalmente
(56)

- 29--
13. TRASFORMAZIONE DELLA MATRICE D'INERZIA PER ROTAZIONE DEL SR
Ci si chiede ora come cambiano Ie componenti delIa matrice :rquando si ruoti il SR.
A tal fine basta sostituire X con la sua espressione funzione
di W' a mezzo delIa (34) nella definizione (54):
J~J(tx n - X XT)~•••~ j[ IG/T"'jLr - ({X' (QT"') TJ J"",. (57)C01G rye
Si esaminino separatamente i due addendi dell'integrando (51):
a.
Ma essendo q ortogonale, (37),si ottiene
ovvero'
(5 B')
J VQ (S8" )
che esprime la nota proprieta di invarianza qel modulo (scalare)
del vettore posizione in ogni SR' cartesiano.
Dalla Q~T= I si ottiene QT I ~::I ,poiche il prodotto
per la matrice unitaria I lascia inalterata la matrice per la
quale e moltiplicata; si puo scrivere la (5St) nella. seguente
forma
(58)

- 30 -
utile nel seguito.
b.
(59)
. Con i risul tati (58) e (59), la (5'7) divent a :
J0(~T/x'}~IQ- qTx'x,TQ) J~~
da cui,raccogliendo a fattor comune Ie matrici QT e Q ,costanti
rispetto all'integrazione, si ottiene:
J== C?f (I X' 1'-1- X r ><,T) .( ..••.
me,
Q. (60)
Ma, per definizione, l'integrale che compare nella (60) e la ma-
trice momento d'inerzia rispetto al nuovo SR ruotato:
I' e JC Ix'It.I - )(,><,T) J"",me
cosicche la (61) si riduce alIa seguente relazione notevole:
o alIa sua inversa
( 61 )
(62.)
J' = Q J Q"': (63)
Se in un SR sona note Ie componenti delIa matrice 1(momenti
d'inerzia rispetto agli assi) la (63) consente di conoscere la matri
ce d'inerzia j' in ogni SR ruotato rispetto al primo (e percio i mo
menti d'inerzia rispetto ad assi ruotati rispetto a quelli iniziali).
- 31 -
Cia significa che non c'e un SR "privilegiato" nel quale espri-
mere i momenti d'inerzia: tutti i SR sono equivalenti.
Anzi da questa osservazione nasce un nuovo concetto: esiste un
oggetto matematico che e in grade di descrivere Ie caratteristiche
inerziali indipendentemente dal SR scelto; tale nuovo ente, Ie cui
componenti nei diversi SR sono espresse attraverso Ie matrici J,J',
J" ... tutte legate dalla (62) e (63), si chiama TENSORE D'INERZIA
e si indica con 7.Si tratta di una generalizzazione del concetto di vettore: nel-
10 stesso modo in cui il vettore puo essere pensato come l'insieme
di tutte Ie sue possibili rappresentazioni in componenti nei diversi
SR, COS1 il tensore e quell'oggetto che e espresso nei differenti SR
attraverso delle matrici ottenibili' l'una dall'altra a mezzo delIa
(62) 0 (63).
Come non si deve confondere il vettore con Ie sue componenti,
COS1 altro e il tensore:J' e alt1"ae la matrice ;r , espressione del ten
sore in un particolare SR.
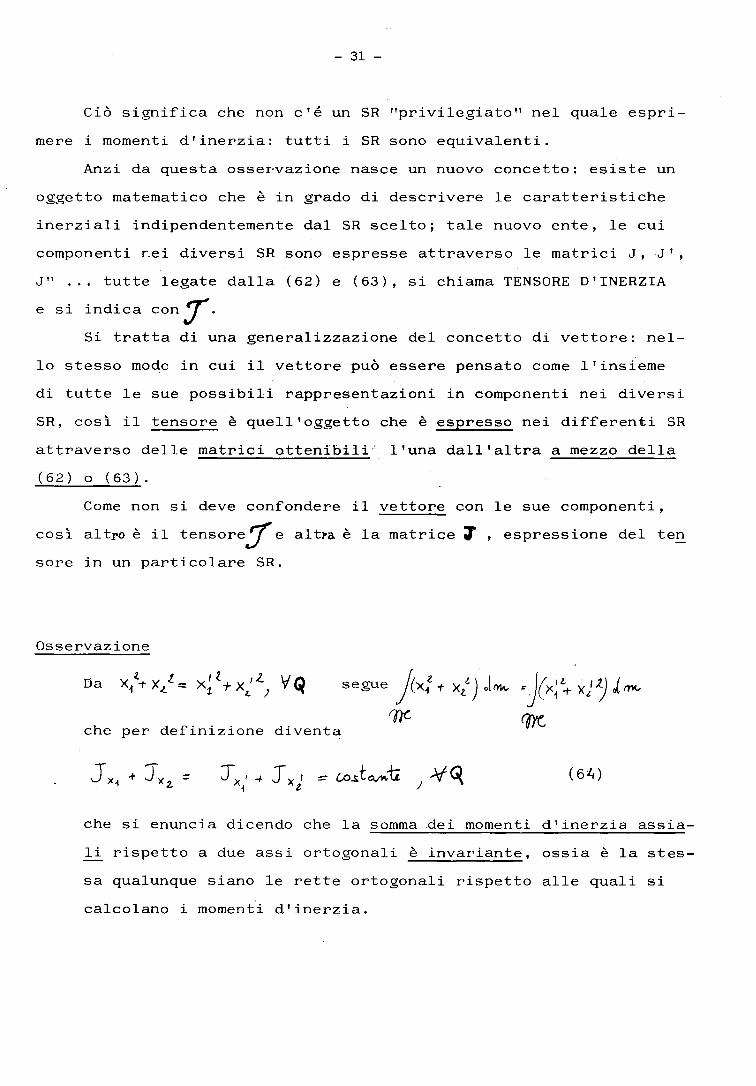
Osservazione
Da X.•<-t X,!l =: x~t+ X; l..; V Q segue }x ..z of Xtl.) ot~1}C
che per definizione diventa
~J(><~~x}~ J~0/1(
(64)
che si enuncia dicendo che la somma clei momenti d'inerzia assia-
Ii rispetto a due assi ortogonali e invariante, ossia e la stes-
sa qualunque siano Ie rette ortogonali rispetto aIle quali si
calcolano i momenti d'inerzia.

- 32 -
14. ESPRESSIONE TENSORIALE DEI MOMENTI D'INERZIA
Le (~?) e (56) possono essere sintetizzate nella se
guente formula generale
'J/ft,t ="".Tt , (65)
con le convenzioni(* )
(66)
(67)
dove la seconda espressione della (67) si giustifica osser
vando che la matrice r e simmetrica ('j:::: j i) e 10 scalare Jrn.l;
per definizione vale anche:
La (65) costituisce effettivamente un'espressione
tensoriale poich~ al variare del SR" ~t resta invariante.
Indicando con~' e t, i versori ~ e t in SR diverse da~A}Xt}con le (33) e (63) si ottiene
(*) Si faccia attenzione al segno nell'espressione del momento centrifugo fornito dalla (67).

- 33 -
ossia
Cia significa che la notazione Jab non e sufficiente finche non
si precisano i versori delle rette a e bj la differenza tra i momen
ti centrifughi ottenuti e solo nel segno.
La giustificazione geometrica e immediataj con riferimento aIle
t.~ .L'WI- _e\
\~\ l-
I\
Fig. 18 a) e b) si vede che,nella seconda scelta dei
versori, il prodotto delle
distanze delle masse
degli assi e di segno di-
verso da quello del primo
Jhi.•t" = J I'll t" J Ih1
1)t
J"',t1: J", t, J"" = J t, (- ",.)J"" "\(DC m
FIG. 18

- 34 -
La (66) si enuncia come segue:
II momento d'inerzia assiale J~ di un SM rispetto all'asse pas-
sante per l'origine del SR di versore 1L si ottiene applicando la ma
trice ~ a~e moltiplicando scalarmente il vettore cosl ottenuto an-
cora per 1'\.
La (61) si enuncia come segue:
II momento d'inerzia centrifuge J~IK'del SM rispetto agli assi~ ~
passanti per l'origine del SR, di versori~ e t , cambiato di segno,
si ottiene applicando la matrice j al vettore ~ e moltiplicando sc~
larmente il vettore cosl ottenuto per t ; oppure applicando. la ma
trice I al vettore t e moltiplicando scalarmente il vettore cOSl ot
tenuto per 11 .
Esempio: dato il SM in figura si chiede di ricavare J'I1 e Jl>1t rispe!.
to agli assi mostrati.
Facilmente si ricava ( Jx"'x ..•
2-
= -a 'l'rI)
"'=[;Z]YVI
Cont:[- YvtJ.Yrz
la (66) si ottiene:
coincidente con il valore che si ricava
direttamente dalla definizione.
Con la (61) si ottiene:

- 35 -
ossia Jx'X' = -4tl,.tM1 , che pure coincide con il valore calcolabile di-1- Z ~
rettamente del momento centrifugo delle masse rispetto agli assi di
versori 1\ e t .
OSSERVAZIONI
a. Per calcolare il momento d'inerzia di un SM rispetto ad una ret-
ta passante per l'origine delle coordinate occorre precisare il
versore che indichi la direzione delIa retta. E' ovvio che esi-
stono due scelte possibili (Fi~.16) in modo che
"'•• II; - 412, -.Tuttavia l'espressione
tensoriale del momento
d'inerzia ~•.•non dipen-
de dall'orientamento
delIa retta: FIG. 16
delle rette. In effetti/
centrifugo di un SM ri
spetto aIle rette.a;6 di
pende dall'orientamento
b. Viceversa il momento x.
osservando dalla fig.17
che FIG. 17
e
dalla (59) si ottiene:

- 36 -
DIREZIONI E MOMENTI PRINCIPALI DI INERZIA
15 . PROBLEMA DI MASSIMO E MINIMO
Dalla osservazione del §13 che afferma J'h-+ J t = costante,
V/ft , t" tali che IY\. 1;:: 0 , e dal fatto che In e uno
scalare limi tato ( (3m I ~ J2. 11 , ove d e la massima distanza
dall'origine) ;segu~ che esiste certamente una direzione della
retta di versore n* per la Quale il momenta di inerzia assiale del
SM rispetto ad essa e massimo.(*)
Al fine di precisare la direzione n* basta calcolare J rispetnto alla generica retta inclinata di e su.ll'asse xl (fig.19 ) e
annullare la sua derivata rispetto a e
(69)
ove ~ e un vettore le cui componenti sono le derivate delle
componenti di ~ ;
'n=[GOS9jSe.-Yl e
l::: [- S frt\ &J/.oS e
Fig. 19
(*) Da Jill'" + J/;.-l! = costante segue che se Jm*" e massimo allora
Jl:~ = minimo ove t* e ortogonale a ",*.

- 37 -
Si ottiene facilmente:
(70)
cosicche la (69) si PUQ scrivere
ovvero 1m. Jt =lJ~t =- o. (71)
11 momento di inerzia ha un estremo se ~l momenta centrifugo
e nullo.
o in simboli,
(72)
Se si sviluppa la (71)
(73)

- 38 -
e si annulla, Jrit=O, si ottiene
td1 e*== .2 J",.2.JlI - J2..t.
o anche ( J..,z c: - J....y)
(,74'f)
(74)
ove si e indica to,con notazione tradizionale, l'asse x1 con x e 10
asse x2 con y.
La direzione ;nit' (quella delIa retta inclinata di e)to rispetto
all'asse ~1) e quella ortogonale t* si chiamano DIREZIONI PRIN
~IPALI DI INERZIA.
Le rette di versori~We t·si chiamano ASSI PRINCIPALI DI INER-
ZIA.
Rispetto agli assi principali di inerzia si ottengono il mas-
simo e il minimo momento di inerzia assiale, tra tutte Ie
che passano per l'origine degli assi.
Osservazioni
rette
a) Ie (73) e Ie (74) indicano in valore e verso,l'angolo di ro
tazione delIa retta di versore 1') rispetto alIa Quale il mo
mento di inerzia assiale e massimo (0 minimo);
~ e-lt 7[;/b) se e* soddisfa alIa (73), 0 alIa (74), allora anche e == + /2.
soddisfa alIa (73); infatti la direzione ~*, orto
gonale a 'n"", e pure direzione principale (per esempio J H" enminimo,Jt~e massimo).
c) se }~y =- 0 ~ :rx - J>, F 0 ~ fa 2 e*.::: 0ossia ~1~2 sono direzioni principali.

- 39 -
d) se 'J)C'/ =1= 0 &. Jx -Jj = 0 ~ ~ .2 e~= :t 00 (-+ 00 5e JX{~O)ossia 2- e * = ± '][/2. ) (J * ::::f '!C/4 ;
le direzioni prineipali sono a 45° sugli assi del SR
e) se J;xy == 0 &. 0x - J7 ::: 0 9 ~2{)~:::indeterminato:qualunque eoppia (*) di assi ortogonali e prineipale
f) noto 8 * e possibile ottenere il valore estremo In*
a tal fine si esplieiti In con la (66):
J;t] [(,oS e]J,n JM1 e
(75)
(*) La giustifieazione e ehe qualunque sia e ~ J"",t (e); 0
(efr. ( 71' )), ovvero J non varia con 8'.n .

Tenuto conto che
.t /) ,,+ GaS 2 ()c.o S 0'= -----) Z
la (75) diventa
- 40 -
-s~~r9= 1-~sle2
Jm =(76)
'*Ponendo ()= B" si ottiene
::: 1
LQs. 28* (77)
_./
Osservando che posto fj ot::" a., si ottiene Cos tV == :t., (It ct.~ ~ (78)ancora con la (74')l'ultimo addenda della (77) si scrive (supponen-
do J"il - ~2 > 0 e
con la Quale finalmente si ottiene
Tenendo presente che J"",* -+ Jt -lI- = J" + ~ Z
(79)
si ha
(80)

- 41 -
La (78) e (79) sono le richieste espressioni dei momenti
principali d'inerzia.
g) Se Iimitiamo il dominie di 8* aII'intervallo [-~ J ~/.4J Ie
(79) e (80) sono valide quando J > J (ossia J si ha nel-11 22 max
Ia direzione 1n~); viceversa se J < J il segno davanti al11 22radicale deveessere cambiato.
h)se Ie masse sono tutte positive allora In e una quantita defi
nita positiva, ossia
che e la definizione di matrice defini ta posi tiva per J.Poiche condizione necessaria e sufficiente affinche una matri-
ce simmetrica
sia defini ta posi tiva e che ~1 > 0
e (*)
(81)
segue
cosicche
la (80) fornisce sempre un valore positive per il momento mi-
nimo.
(*)Cfr. Teoremidi algebra delle matrici.

- 42 -
16 . PROBLEMA AGLI AUTOVALORI
La (66) indica che per valutare il momento di inerzia J~ oc
corre calcolare il prodotto scalare tra il versore ~ ed il vetto
re j", (prodotto del ._,-tensore. d I inerzia per ~ ).
In generale i vettori '" e!'h 'non sono paralleli (collineari ):
la proiezione di r~ sul versore t ortogonale a1t e diversa da
zero (fig.20), ossia J/')'Il; = t.Jm ::/=0.
------1.
Fig.20
Con questa osservazione si PUQ affermare che ricercare le di
rezioni ~* e t* per le quali il momento centrifugo e nullo equiva
le a ricercare la direzione ~4 per la qualeJm4e parallelo a~~
in simboli (*)
(82)
(ove A e uno scalare) che e un classico problema di autovalori.
La (82) PUQ essere anche scritta, utilizzando la matrice
uni taria 1 , come JItIJtt- 'AI I)J.=.0, ossia
(83)
(*) Due vettori Ai. e "b sono paralleli se 0,... = A b J ~ € /fl.

- 43 -
La (83) traduce formalmente un sistema lineare di due
equazioni in due incogni te (1Yl ~ e. ttJr, le componenti di ,,""),re~to
dalla matrice (J - A I ).11 sistema e omogeneo; cia significa che esiste certamente*
la soluzione banale ~ = D (come e facilmente verificabile ).
Tuttavia tale soluzi6ne non e significativa per cui ci si
chiede se esistono altre soluzioni.
Cia accade solo se almeno una delle equazioni che compaiono
nel sistema (83) e combinazione lineare delle altre, ossia il de-
terminante della matrice deve essere nullo (Rouche - Capelli )
J.u.-).
(J-Alj=o
ossia J JAA - AI,l.=0
che sviluppato fornisce la cosidetta equazione secolare
. (84)
Le soluzioni della (84), Ai e ~2 ,(*) sono detti autovalori
della matrice :r :
(85)
e coincidono con i momenti principali'd'inerzi?-.
Se si sostituisce A-1 (0 A-l,) nel sistema (82),eliminando
una equazione -combinazione. lineare dell' altra- si possono otte
nere i valori delle incogni te 11/,,~e 'Yl: componenti dell' autovetto
re 'Yl"l. corrispondente al14 autovalore .A1. (0 )..,t).
(*) Si pua dimostrare che se Je'simmetrica e defini ta posi tiva.,
gli autovalori sono reali e positivi. 1noltre gli autovettori
corrispondenti sono ortogonali.

- 44 -
C1RCOLO D1 MOHR
17. CIRCOLO D1 MOHR PER I MOMENT1 D1 1NERZ1A.
Si vuol mostrare che il punta P le cui coordinatendefini te dalla coppia (J,., (9) , J/l1t (e)) descri ve un circolo
sono
al
variare dell'angolo d'inclinazione e del versore ~ sull'asse xl.
Utilizzando la
Jtyl - .Ju+ J:.2 =2.
(76) e la (73) si puo scrivere:
JI1- Jl.t 005 1..e -t JI2.. .s~ 2. f72.
.III -JIZ, ~fM 2 e of J1t ,tos 2 ti2.
(86)
dalle quali, elevando al quadrate e sommando, si ha
(87)
(88)
La (87) e l'equazione di un circolo (Fig. 21) con centro
C sull'asse delle ascisse di coordinata
J = J" + T'l-C 2..
e raggio
(89)
denominato Circolo di Mohr.
OSSERVAZ10N1
a. Poiche a ciascun punta del Circolo di Mohr sono associati i
momentl d'inerzla del SM rispetto a due assi (inclinati di e
sul SR assegnato) e possibile individuare immediatamente

- 45 -
i valori estremi di J ossia i.momenti principali d'inerzia chenSi, otterranno in corrispondenza del dei punti di intersezione
del Circolo con l'asse delle ascisse. I valori principali so
no ottenibili, stante la (8.7)come
JM'I~)tn11'~ == Je ± tche coincide con Ie (79) e (80); con notazione tradizionale si
scrive anche
(90)
Dalla osservazione h) del paragrafo'precedente si deduce
che il Circolo di Mohr giace nella regione J ~ o.nb. Sia P = (J , J t) il punto rappresentati vo dei momenti d'iner-n n n
zia quando il versore" e inclinato di e sull' asse xl (Fig.22);
il punto Pt, rappresentativo dei momenti d'inerzia quando il
versore " e inclinato di e T 1f:/2.. (Fig.23), e allora
trale rispetto a P (Fig.24).n
J...•
diame-
Fig. 21
J",
Fig. 22

- 46 -
J.t
Fig. 23 Fig. 24
Infatti ponendo e -+7{;/2 nella (86) si ha (*)
J: ( "C) '= JI1 -+ J22 _ (JII - Ju (,o~.t.etJ ~.2e)Met;: l., z It
mentre Jnt cambia di segno.
c. Si supponga che il SRassegnato sia principale, ossia
-J = J12 = O. In tal caso le (86) diventano (**)x1x2
= -(91)
Le (91) sono suscettibili di una interpretazione notevole se
si assumono le seguenti convenzioni:
(*) LOS(,l&tn;)::. - c.os2.() i .)e~(.le+'C)::: - :'lt111f).
(**) Si supponga, per semplicita.,J! >J1

- 47 -
- in ordinate si riporta -J t= J. I I' ossia il momento cen-n x1x2
trifugo come definito al §6
si misura 28 , nel piano del Circolo di Mohr, nella stesso
verso di rotazione del versore ~ nel piano del SM.
Per laprima convenzione Ie (91) diventano
J~ _ Jl +<7"l =- J~-J~ Co~.2eZ
2- (92)
- JIi1t-
= -t Jj - ~"1 .s~ 1. eL
Ie quali indicano che quando "'" ruota di e il punta Pn
suI Circolo di Mohr, rappresentativo dei momenti dlinerzia
rispetto agli assi ruotati, ruota di 2 e attorno al centro
del Circolo (Fig. 25).
Fig. 25
Ovviamente per e = 0 -==9 PNl:= Px .,
e per e:: 'Tt/Z ~ £111:: Px .t.
II punta P (6) puo essere anchente costruzione(Fig.26):
& JM = JsJc! JM = J'1'determinato con la seggen""'l

delle
(Fig. 26) si interseca il Circolo di Mohr in un punta
- 48 -
1. sia p* il simmetrico di P rispetto all'asse delle dellexl
ascisse, denominato polo del Circolo di Mohr (*); si trac
ci una retta verticale per p* parallela all'asse
ordinate (verticale);
2. ruotando la verticale per p* delle stesso angola di cui
ruota il versore t ,ortogonale a ~ sul piano del SM
P~nche con le sue coordinate esprime i momenti d'inerzia del
SM rispetto all'asse di versore ~ (ascissa) e agli assi
Ir\ e t (ordinata).
e t , rispetti vamente.
alla circonferenza--------
centro P Cp* e 2 e .ncostruzione le rette
In effetti l'angolo
per cui l'angolo al
Si osservi che per
lele ai versori ~
Fig. 26
in p* vale e
net sono paral-
all'asse xl per cui P*= Pxl
(*) Nel caso particolare di SR principale P appartienexl

- 49 -
18. IL CIRCOLO DI MOHR IN UN SR NON-PRINCIPALE
Nel SR generico assegnato il Tensore d'inerzia abbia le
seguenti componenti
(93)
Con la convenzione di considerare come parametro -Jnt
(= J , ,) anziche J t le (86) si possono scrivere:x1x2 n
JII T J.U _0\1 - J1. 2. {.Os1. e - (- Ju ) ,S-tM 1. e
2...
(94' )
( 94'.',)
Queste relazioni, che esprimono i momenti d'inerzia ri
spetto agli assi passanti per l'origine del SR e di versori m
e t , possono ricondursi alla seguente forma
vr=
z=
Ov UJ::, 2.e - b ~ 1.e = A lo~ 1-{B+eo)
~ ~ 2. e ;. b (oj le = _A ~~ if e+ eo)(95)
(98)
(99)
(96)
(97)
ove si e posta
~ = :1" - J2L.l
,6 = - :I,%..
A =.y:;: b'- ~ V(J.,~Jut+:r,/ = 'Z
~ .2 e()= 1- ~- .l Jtt. ~ _ tJ.2e~IJ..., J"1I-JZ.t
Le (94), per le (96) ~ (99),diventano, con la posizione
(88),del tipo

- 50 -
(100)
le quali sono le equazioni parametriche di un circolo (Fig.27)
percorso nel senso positive degli angoli (antiorario)a partire
dall'angolo iniziale -2 e*.
-I.t
Fig. 27
Le (100) per 8= a forniscono P che e il punta associatoxai momenti d'inerzia del 8M rispetto agli assi del 8R assegnato.
Infatti tenendo presente che
CDs rL =
si ottiene:
)
a.
1
~A-t(1.JI2. )'311 ·Ju

- 51 -
ossia
b.
-Jlllt ': - ~ ~2e*-:::. -t, (.Oj2e'*~11:7*= - JI/-Ju. ,2Jlt = - Ji.t.2. JI/ • 1.2.2..
Da quanto esposto si puO affermare:
1. Si prenda un sistema di assi cartesiano ortogonale ove in
ascisse si riportano i momenti d'inerzia assiali J e in or----- ----------------ndinate i momenti centrifughi, ossia le componenti Jfut cam-
biate di segno;
2. Si riportino i punti PeP (0 PeP ) relativi ai momentix Y xi xL
d'inerzia rispetto agli assi x e Y-(o x~ e x2)
del SRasse-
gnato per descrivere il SM;
3. Per conoscere i momenti d'inerzia rispetto ad assi ruotati
dell' angolo e rispetto x e y (0 xl e x2) basta ruotare di 2 enello stesso verso, il raggio che unisce Peon C; il punto p~---------- xcosl individuato descrive con le proprie coordinate i momenti
d'inerzia cercati (anche in segno).
Esempio
x
- J...t - J""yl
'..,s·

- 52 -
2 2Pn(45°)= ( ma , +ma ) valori che coincidono con quellilabili direttamente •
calco-
Fig. 29
insiste
seguesu un arco il cui angolo al centro e 29
IIRuotando di e (nello stesso verso di rotazione del versore ~)
la retta verticale per P*, si intercetta un punta del Circolo
che coincide con P .n _
In effetti poiche l'angolo alla circonferenza P p*pn xl
-----P p*p = e .xl n
In questa modo si PUQ interpretare la rotazione della
retta verticale per p* come parallela all'asse di versore t del-

- 53 -
la coppia di assi rispetto ai quali si chiedono i momenti d'ine£
zia. Per. l'esempio precedente la costruzione e quella di Fig.30.
-J.t:: Joe''!'
Fig. 30

- 54 -
19. Rappresentazione grafica delle direzioni.principali.
Da quanta affermato in conclusione del paragrafo precedente se-
gue naturalmente una via per determinare graficamente Ie direzioni
principali. In effetti basta individuare quelle rette che dal polo
p* passano per i punti estremi del Circolo di Mohr sull'asse delle
ascisse, come mostrato in figura:
FIG. 31
I
Infatti i momenti centrifughi rispetto agli assi paralleli a
~ e 1 sono nulli perche P3 e P, hanno ordinate nulle.
Per concludere s~ osservi che esistono diverse possibilita di
denominazione degli assi principali in relazione ai multipli di
%/2 che si aggiungono alIa minima_rotazione necessaria per porta-*
re la retta verticale per P in corrispondenza degli estremi del
Circolo (Fig.32). (Si noti che gli assi {3J1J formano sempre una
coppia levogira).

- 55.-

(101)
- 56 -
SISTEMA ANTIPOLARE
Torniamo ora a considerare il SM come distribuzione di su
perfici A (DS) ,descri tta in un SR cartesiano non-ortogonale
(efr. Fig.l), supponendo per ora che-la retta x non sia baricen
trica. Learee saranno sempre positive, salvo avviso contrario.
20. CENTRO RELATIVO
Definendo la massa elementare dm come momento statico dSxdell'area della superficie elementare dA rispetto alla retta x
(cfr. 4.c e 6.d)
cl fW\, ~ J, S>,
M c jclM\, = S)< ,
rA
possiamo,chiedere di determinare il CM di questa nuova distribu
zione di massa. Come da definizione
- J)( .~('M. ]
)( :::..!.. "fYr.-
ct'j t1J yL~
'YItt
per cui, stante le (101),
(102)
le coordinate del CM diventano
[ fy t~A ]
J"y
X ::: J-. vf,
S)t
c." .5,. J y y d.-A =
J)<
I .(103)
~
Sx
11 CM dei momenti statici rispetto all'asse
x prende il nome di
Centro Relativo (CR) alla retta x della DS e si indica con CxDalla (103) scaturisce immediatamente il significato geome
trico di CR: se pensiamo il momento statico della DS "concen
trato" in C possiamo ottenere i momenti d'inerzia come segue:x
(104)

- 57 -
Calcoliamo esplicitamente l'ordinata del CR utilizzando la (5)
ed il teorema di trasposizione (25')
'" :' (105)
Questa relazione indica che il Centro Relativo dista da x
Relativopiu del baricentro G; in altre parole retta e Centro
sono da bande opposte rispetto a G.
Dalla (105) segue pure che se si fa tendere la retta x a G
se
im-
rettala
(YG ~ 0) Cx si sposta all'infinito (YCx~OO). Viceversa
YG -+ CO allora YC - YG -+ 0, ossia se x tende alla rettax
propria allora C tende a G.xAssegnata una:"retta x*, possiamo scegliere
passante per G con un'inclinazione tale che risulti J * = 0x Yo
(Fig.33, cfr. anche oss. 21.a).
Dal teorema di trasposizione
per il momento centrifugo (24)
J)()to = Jx% ==- Jx Yo :: 0 J
qualunque sia la retta x del
fasCio di rette parallele a
x*. Per la (104") (cfr. an
che la successiva oss.b) tut
te le rette x hanno il Centro
Relativo C su Yo; in partixcolare se la retta x tende a
G, C tende al punto impro-x
prio di Yo. Notiamo infine
la corrispondenza biunivoca
tra la retta x ed il suo CR
( ~ Yo) la cui distanza da
Fig. 33

- 58 -
x e facilmente determinabile con la (105).
Osservazioni:
a) Poiche il CR e un CM (di una distribuzione di momenti statici)
la sua posizione non dipende dal SR utilizzato per posiziona£
lo.In generale una volta assegnata la retta x e valutato il
campo scalare dS dei momenti statici dellexIe retta, potremmo determinare C in un SRx
non necessariamente coincidente con lX,y] .
dA rispetto a ta
qUalSiasi!Xt,X2}
!J.~~x '" M\, 1. /IV I{[
62. SX r:: ~ ~ VI
~ [/WI..2 0., ifi .2.\1.. Vi3M1ll-V'i.
o::
o
Come si verifica facilmente questa punta coincide con quello
trovato in precedenza.

- 59 -
c) Come si e visto,
agevole se J =xyretta x possiamo
trifugo della DS
Tuttavia nel caso in cui i due SR coincidono risulta la rela
zione notevole (103). Nel segui to sceglieremo sempre tX1J X.l.)~~)(;'11.
b) Se J = 0 dalla (104") risulta Xc = 0, ossia se il momentoxycentrifu~o della DS lit rispetto X alle rette x e y e nullo
(*) il CR alla retta x appartiene a y.
la ricerca della posizione del CR e resa piu
O. Poiche di solitoe assegnata solamente la
fissare y in modo tale che il momento cen
if{ sia nullo. Tale procedimento e immedia-
to nel caso di simmetria (anche non ortogonale~ cfr.5.c) per
il Quale la y e anche baricentrica. Si voglia, ad esempio,
valutare il momento centrifugo del triangolo di fig. rispetto
agli assi xl e x2• Scegliendo l'asse y coincidente con la me
diana della base risulta J = O. C giace quindi su y, adxy x
b
una distanza
.,... -;- b C' j10IC.. i Iy _ <J)c Z /..vrel<- -05 = -r-/-I-' --J =?)\ - 0 '" J-u..l. ~ <-
Z. :?
Dall'indipendenza della
posizione del CR (oss.a)
risulta facilmente
(*) Occorre sottolineare che da J = 0 non si puache x e y sono direzioni principafi d'inerzia; cia e10 nel caso in cui le due rette sono ortogonali. Se
accade le rette si dicono, come vedremo, coniugate.
dedurrevero socia non

- 60 -
21 TEOREMA FONDAMENTALE • POLARITA'
Come abbiamo fatto per la retta x nel §20 possiamo ora
considerare i momenti statici della DS ~ rispetto alla retta
y e ricercare il CM del camposcalare dS • Definiamo pertantoyCentro Relativo alla retta y, C , della DS ~ il punto di coyordinate
[ Jx xLA
JyX '"
_I d.sy I (106)'" Cy
57 f Y )( lAl)(y-
tASy
in perfetta analogia con la (103).
y. Abbiamo pertanto provato il
Nel caso in cui J = 0 risulta yc = 0 cosicche il CR Cxy Yyappartiene alla retta x; ma.per l'oss.20.b da J = 0 segue. xy
seguenteanche C ExTeorema Fondamentale:(TF):
Se la retta r contiene il CR alla retta s
allora la retta s contiene il CR alla retta r.
In simboli:
Definizione 1: due rette si dicono coniugate se una contiene
il Centro Relativo all'altra.
Con questa definizione possiamo riassumere quanto detto nella
seguente proposizione:
Condizione necessaria e sufficiente perche due rette r e
s siano coniugate e che il momento centrifugo della DS
J , sia nullo.rsIn simboli: Lsit <-> C" ~ s ~ ~s =0.E' evidente che esistono infinite rette coniugate ad una retta
r assegnata: sonotutte quelle del fascio di centro C (Fig.34).rDal TF segue che i Centri Relativi alle rette s.1 giacciono
su r; inoltre poiche la corrispondenza tra una retta ed il
suo Centro Relativo e continua, possiamo riguardare ogni ret
ta r come la punteggiata dei Centri Relativi alle rette del

- 61 -
Fig. 34
fascio per il proprio Centro Relativo C .-------- r
Abbiamo finora stabili to che, assegnata la DS rJt • c'e
corrispondenza tra rette e punti: per ogni retta r del piano
(propria 0 no) esiste un CR C Centro di Massa dei momentirstatici rispetto a r; viceversa ogni punta del piano puo es-
sere riguardato come Centro Relativo ad un'unica retta (cfr.
oss.a seguente). Questa corrispondenza, biunivoca e continua,
si chiama POLARITA' e si dice che Ceil Polo di r mentrer ---------r e la Polare di C •--------- rDefinizione 2: due punti si dicono coniugati se uno giace sul-
la polare dell'altro.
Per esempio G e il polo della retta impropria e, per il TF,
la polare di un punta improprio e una retta baricentrica.
Con quest' ultima definizione si puo anche affermare che
ogni retta e il luogo dei punti coniugati al proprio Centro
Relativo.

- 62 -
Poiche r e C sono da bande opposte rispetto al baricen-rtro G non esistono rette Autoconiugate (nessuna retta contie-
ne il proprio Polo), ne esistono punti autoconiugati (nessun
punto giace sulla propria polare) (*).
Osservazioni:
a) Poiche il CR e un Centro di Massa (ed e unico) si intuisce
che, assegnato un punto C, deve esistere una retta x (ed
una sola) tale che~il suo centro relativo C coincida conxC. In effetti la determinazione delIa retta incognita puc
avvenire con il seguente procedimento:
1. Facciamo passare la retta Yo (? G) per C (poiche non e
sistono rette autoconiugate x f Yo) •
2. Poiche C deve coincidere con C ,per il TF C deve ap-x Y
partenere alIa retta x; inoltre poiche Yo e baricentri-
ca il suo Polo e improprio; segue che x non puc essere
paralla a Yo perche altrimenti C sarebbe il punta im-Yo
proprio di x che e il medesimo punta all' infini to di Yo
e Yo sarebbe pertanto autoconiugata.
3. La pOlare di C interseca :9.unqueYo in un punta 0 nel
Quale poniamo l'origine del SR ~x,y1 .
Assumendo come parametri incogniti yC e l'angolo d che
la generica retta del fascio per 0 forma con Yo (Fig.35)
Fig.35
(*) Se cic accadesse dovrebbe risultare, dalla (105),
t
YCK - Y(;" eiY c,. = - yrx ->
la cui soluzione e immaginaria.

- 63 -
la retta r sara determinata dalle seguenti condizioni:
(a)
(b)
11 sistema e sempre solubile: supposto YC costante
esiste certamente una soluzione ~ della (b) essendo
J (oL; Yc) una funzione continua di ot che cambia dixy
segno almeno una vol ta per ~ € (OJ lJV) • Trovata la direzio
ne x coniugata alla Yo ' ogni retta x parallela a x
e pure coniugata a Yo (cfr; oss;b) per cui la (b)
diventa indipendente da yc e pertanto sempre soddisfat
ta. Basta risolvere la (a) scrivendo
ovvero, ponendo CG = w,
-> Yc ;: W -t e'O.(.v:; 7
b) Se due rette xoe Yo sono coniugate (J = 0), ossia ilxoYo
punto all'infinito dell'una e il polo dell'altra, tutte le
rette y parallele a Yo sono coniugate a Xo e tutte le ret
te x parallele a Xo sono coniugate ~ Yo' 1nfatti il teore-
ma di trasposizione (24) mostra che0 A ~Jxo'l ~ ~i )(trj{ :::0 )o 0Jx Yo :::
J~o + A;; y~ ~ 0 ,
La proprieta enunciata si poteva dedurre anche come appli
cazione del TF osservando che tutte le rette x parallele a.
Xo passano per il polo di Yo che e il punta all'infinito
del fascio.

- 64 -
22.INVOLUZIONE DELLE RETTE E DEI PUNTI CONIUGATI
Assegnamo un punta qualsiasi Q del piano e tracciamo per
esso la retta rQ (Fig. 36). Tra tutte Ie rette del fascio di
centro Cr ' che sono coniugate a rQ(*), scegliamo la retta rche passa per Q (**);
ad ogni retta rQ del fascio
per Q possiamo associare
un'altra retta del fascio,
rQ, coniugata alIa prima(ossia tale che C E F).rIn simboli
Fig. 36
Determinata r possiamo chiederci di nuovo quale e la retta rQassociata ad essa, ovvero quella retta per Q che contiene il
polo C_. rQnon puo che coincidere con r poiche tra tutter Q
Ie rette del fascio di centro Cr ' che per il TF ~ rQ, l'uni-
ca che passa per Q e proprio rQ.In simboli
Ricordando che una relazione f che gode delIa proprieta
-> I
(*) 5e G E r C e un punto all' infini to ed ilfascio e costirtuito da rette parallele.
(**) Poiche Cr I r (non esistono rette autoconiugate) r f r.'

- 65 -
qualunque sia l'elemento a del dominio di definizione E, si
dice Involutoria , denominiamo la corrispondenza
C'l.
--t 1':)"' ••••Ie""\ c- 'tIt>
Involuzione delle rette coniugate attorno a Q.
Di notevole importanza e l'involuzione delle rette co
niugate attorno a G, per le quali, come abbiamo visto, il po
lo dell'una e il punta all'infinito dell'altra.
Sfruttando la definizione di punti coniugati possiamo,
in modo duale, parlare di corrispondenza tra punti di una
stessa retta. In effetti
assegnata una retta r
qualsiasi ed un punta Qrad essa appartenente,
tracciamo la polare q di
Q (la Quale per il TFrpassa per C· ) che interrseca r in un punto qr(Fig.37). Ad ogni pun-
to Q ere associatorcosi un altro punta
I
IFig. 37
passare
dobbiamo
la retta da-
passa per C ,ranche
ta. Poiche Q E rrma ~ appartiene anche a q per cui q (*) deve
per Q cosicche otteniamor
Q corrispondente a Qr rricercare l'intersezione della polare q di Q conr
il TF consente di affermare che q
Q E r:rSe ora vogliamo determinare
Q. 'U -> Q'U : Q 'V c q
Abbiamo dunque stabilito l'involuzione dei punti coniugati su
(*) q e q si corrispondono percio nell'involuzione delle ret
te coniugate attorno a C .r

- 66 -
una retta:~
QlO" - ... Q-tJ,Particolarmente importante e l'involuzione dei punti co-
niugati di una retta baricentrica.
23. L'ELLISSE CENTRALE D'INERZIA (Culmann)
Abbiamo visto nel §21 che la polarita tra rette e centri
relativi non ammette elementi uniti (rette e punti autoconiu
gati). Questo fattoeparticolarmente sgradito perche non con
sente di individuare, nel piano della DS ~ , quei punti no-
tevoli che possono dare immediate indicazioni
assai utili nelle applicazioni.
Si ricordera che non esistono elementi
qualitative
auto-coniugati
perche polare r e polo C sono da bande opposte rispetto a G.rPer ovviare a cia operiamo una simmetria di C rispetto a G--------r'--.....o-------ottenendo un punta P • Se ridefiniamo polarita la corrisponrdenza tra r e p(~allora la relazione tra r e C diventa unar rANTIPOLARITA' tra la pOlare r e l'Antipolo C . Mentre l'anti-rpolarita e ancora priva di elementi uniti la polarita tra r e
Prammette elementi autoconiugati: esiste una retta che contiene il
proprio polo; per ottenerla basta imporre che la distan-
za di P dalla retta siar
d'inerzia della DS ri-
spetto alla retta bari-
Fig. 38
(107)
il raggio
nulla
'Y -('( -v)::o6r e'l; 1(;
Yr.r - ( Co~/'j&) ~ 0
essendo fto
centrica parallela a
quella considerata.
(*) Dall'unicita del CR segue l'unicita del polo P .r

- 67 -
La (107) mostra che tutte le rette che distano ~ dal bari
centro contengono il proprio polo e pertanto sono autoco
niugate.
Con l'introduzione della definizione di Antipolarita pos
siamo modificare il TF come segue:
se una retta r contiene l'antipolo Cdellarettassallora
s contiene l'antipolo Cdi r.r
Possiamo a questo punta chiedere di determinare
illuogodei
Per sempli-
ficare le cose scegliamo il SR coincidente con quello princi
pale d'inerzia della DS. L'idea e la seguente: al variare del
la retta generica r, in
dividuata dalla direzio-
Fig. 39
ne 'n ad essa ortogonale
e dalla distanza d da G
(Fig.39), cerchiamo le
coordinate di C ed im-rponiamo che il punta P~,
simmetrico di C rispetrto a G, appartenga a r.
Per quanto detto l'equa-
zione di r si scrive
()( - )(~). ~ := 0con )(*: -d "" , oppure

- 68 -
Le coordinate di Cr ne SR fn,r} sono
.J.- /- Jl; J",- _, [Jto-+ Mdl] ::::[d}-t _, [Jtojt-1J L -J~t 1'1<1 - J/)\~ 0 MJ .J'At
che nel SR !n,t~ baricentrico diventano
(108)
w':I
Md
(109)
avendo indicato con ~'il vettore C - G.rPer la (107) la distanza d per la Quale la retta e auto-
coniugata vale f t ' mentre operando la simmetria Ie coordi-o
nate di P sono quelle di -WI; infine se vogliamo riferir-
ci agli assi Jx1,x2) basta utilizzare la trasformazione di
coordinate (34) _W=_QTw' ottenendo COS1
(110)
. 2 2 1. ~. l/l fJ 1. If)Da Jt = J11 sln Q +J22COS Q segue (''to = f, .hk. f7"t,L(P?o
che la (110) puo essere riscritta come segue
cosic-
\.1 _ to) e
- XP'lJ = I
V (Jc. )' .,~'e+ rrn'f)
fvFffr" ~\M. 9-
I(111)
f,
-V (1-'-)" .;~'e+"",'6t" '

- 69 -
Ponendo
11/ r L
~(;)
11~ ~J';" L~ -r (0./ eIt.. h~ 9
Y ~t.. ••.•.~ e -t (nt ()
(112)
(113)
~f=;~"$ele (112) si semplificano fornendo finalmente le coordinate del
ovvero
punta P~autoconiugato sulla retta r
(114')
Le (114') sono le equazioni parametriche del luogo cercato:
l'ELLlSSE CENTRALE D'INERZlA (ECl).
Elevendo al quadrate e sommando otteniamo la forma cano-
nica (Fig.
40)t
1.
X",Xl.= 1- (114)-+
Xl.
fl,tf/
Fig.40

- 70 -
Notiamo che gli assi dell' ECl sono que IIi principali d'iner
zia delIa DS rJf.
Se vogliamo conoscere la relazione tra la retta r e la
sua coniugata ~ (passante per C , G e P ) basta calcolare l'r rangolo 9 a mezzo delle (114')r
~ {};;;= ' ><~p~ ~ A t r'><-11\" i~ (j
che per la (113') diventa
(115)
Poich~ l'inclinazione delIa retta r sull'asse xl ~ 9 - ~/2 '
(cfr. Fig.39) abbiamo che tg 9 = - ctg 9 cosicch~ la (115)rfornisce il risultato cercato
Questa relazione traduce analiticamente
delle rette coniugate attorno a G; infatti
(116)
l'involuzione
.2.
/tJ1>i::
~ &/i -= - A. C-~ ~'l,
--=
~ t1~ = _ ••.' '-~ £I. = - ••.• 4 < ~ eO, -l>ItJ 'r
> 'V :
_ tl..Jl.e~&'Z,.
Riassumiamo brevemente cia che abbiamo fatto: dalla corrispon
denza.tra retta (polare) e Centro Relativo(Antipolo)priva di
elementi uniti ellisse immaginaria, a mezzo di una simmetria
di C rispetto a G abbiamo ottenuto un'altra corrispondenzartra retta (polare) e polo ~ per la Quale il luogo dei pun-
ti autoconiugati ~ reale: l'ECl. Quest'ultima corrispondenza
~ anch'essa una polarita tra Polare e simmetrico di C rispet-. rto a G.

- 71 -
Conica rettaCP(simm.C )Corrispondenzarr
tra r e Crlmmaginaria
PolarePolo--Polarita
Reale
(ECl)PolareAntipoloPolo Antipolarita
Dalla costruzione e con la (107) deduciamo che l'ECl e
anche il luogo del generico raggio d'inerzia ~o(rispetto al-
l'asse r 0 baricentrico) riportato lungo la retta coniugata rG.
Naturalmente il momenta d'inerzia, e per conseguenza il rag
gio d'inerzia, e calcolato del SR delle rette coniugate che
si corrispondono nell'involuzione attorno a G. Se si vuol co-
noscere il raggio d'inerzia valutato con distanze
prese ortogonalmente all'asse basta proiettare f~osulla per
pendicolare a ~per G(Fig.41) come indicato dalla (15).
Da questo punta di vista
si ha conferma diretta che
le direzioni degli assi mag
giore e miminore dell'el-
~ lisse coincidono con gli as-o
si principali centrali d'i-
nerzia della DS ~.
Fig.41

- 72 -
24.COSTRUZlONl NOTEVOLl CON L'ECl
Come accennavamo all I inizio del §23 la conoscenza del-
l'ECl semplifica grandemente la riceTca delIa corrispondenza
retla-Centro Relativo (Polare-Antipolo); anzi, in generale,
basta la conoscenza di due diametri coniugati per determinare
tutte Ie caratteristiche inerziali delIa DS .
a. lnvoluzione delle rette coniugate attorno a G.
Abbiamo gia visto che la coniugata alIa retta rG si ottie
ne unendo il baricentro con il punto di tangenza delIa pa
rallela a rG all'ECl (cfr. Fig.40).
b. Determinazione delIa polare dato l'antipolo (nota IlECl).
b.l. P esterno all'ECl (Fig.42)
Tracciam6 da P Ie due tan-
genti alliellisse a e b
(punti di tangenza in A e B
rispettivamente).
Ricerchiamo dapprima la po
lare di P; vale natural men-
te un teorema analogo al TF
per cui la polare p* di P
f e la retta AB. L'antipolare
p di P e percH> la retta
simmetrica di AB rispet-
to a G.
Fig. 42
interne all'ECl (Fig.43)
Tracciate due rette a e b
qualsiasi e determinati con
il procedimento b.l. i poli
A e B, l'antipolare richie
sta e la retta simmetrica
di AB rispetto a G.
Fig. 43

- 73 -
c. Determinazione della polare dato l'antipolo (noti due dia
metri coniugati qualsiasi)
Tracciamo per P due rette a
b .e b parallele ai diametri
la quale pUG essere riscrit-
punti coniugati. Analitica
mente vale ancora la (105)
coniugati noti. Ricerchiamo
poi gli antipoli di a e b
deil'involuzionetramite
Fig. 44
ta
ovvero
graficamente ricordando che
avendo posta w')(, la distanza
Px G, dove X. indica, a se-
ipotenusa.
a 0 b.
rettangolo
(117)
interpretabile
casi,
w-:. =';t.
in un triangolo
sulla stessa
l'altezza relativa all' ipo
tenusa e media proporzionale
tra le proiezioni dei cateti
conda dei
La (117)
La costruzione e riportata
in Fig. 45. L'antipolare di
P e pertanto la retta per
c' e"
L % , IfA
Fig. 45

- 74
25. NOCCIOLO CENTRALE D'INERZIA
E' utile conoscere, in alcune applicazioni (pressofles-
sione), il CR (Antipolo) di una retta tangente al contorno di
una superficie. Si pone percio il problema generale di determi
nare il luogo degli Antipoli delle rette tangenti e non seeanti
di una DS vt assegnata: il Nocciolo Centrale d'Inerzia (NCI).
Come si desume dalla definizione non sono soltanto le caratte
ristiche inerziali della distribuzione c4 che influenza il
luogo, ma anche la configurazione geometrica; piu precisamente
e determinante la geometria dell' inviluppo di rette Inv( ~) (*)
della distribuzione di superfici. Con riferimento alla Fig.44
il NCI e il luogo degli Antipoli delle rette tangenti alla cur
va ABCDE = Inv (t/6 ).
E
A
Dalla definizione seguono alcu~
ne proprieta notevoli:a.
L'antipolo di una retta (non)
intersecante la DS
Cl'be(interno)
esternoalNCI.
Infatti il CR
·diunaretta
baricentrica (che certamen
te interseca ~) e un pun
to improprio. Poiche esiste
Fig. 44
una retta propria tangente
all' Inv(~) il cui antipo
10 giace sul NCI, dalla con
tinuita della corrispondenza
~~~
segue la proposizione a. Indicando il dominio racchiuso dal
NCI con ~(NCI) e cono
~ (NCI) l'insieme dei punti interni
possiamo scrivere in simboli
(*) Ovviamente Inv( ~ ) delimita un dominio convesso.

- 75 -
Nt!
Fig. 45(NC1) contro l'ipote-C Cs
segnate in figura, hanno il
CR Ct sul segmento (Ca,Cb)
i punti del quale, per ipo
tesi, non appartengono a
~ (NC1). D'altra parte tali
rette sono esterne a 1nv(v()
per costruzione (*) e dalla
proposizione a. segue che
si che pertanto e falsa.
c. Ad ogni cuspide dell'1nv(vt) corrisponde sul NC1 un segmen-
b. 11 NC1 delimita un dominio convesso. Dimostriamo la proposi
zione per assurdo. Supponiamo che il NC1 non sia convesso;
esiste duhque una retta s per i punti C e Cb-, appartenentia ~
al NC1, il cui segmento (aperto) (Ca,Cb) 1- Ol) (NC1) (Fig.45).Per il TF e dalla definizione di NC1 deduciamo che C e l'in-stersezione delle rette a e b tangenti all' 1nv(er{) e polari
di Ca e C b,rispettivamente.
Le rette t, della famiglia
del fascio di rette per Cs
to. Basta richiamare che, detto P il punta di cuspide, il
luogo degli antipoli delle rette del fascio per P e la pola
re di P (cfr. §21).
d. Ad ogni variazione discontinua del punta di tangenza all'
1nv( vi ) corrisponde una cuspide del NC1 (che e l'
antipolo della retta che si appoggia con piu di un punta al
l'1nv( v1 )(Fig. 46).
e. 11 nocciolo centrale d'inerzia
e sempre interno a Inv(v1).
(*) C e un punta esternosdi un dominio convesso.
Fig. 46

- 76 -
Esempio: determinare il NCI di un triangolo.
5e le masse sana negative le proposizioni a. e b. non sono
pilivere, ma resta valida la definizione di NCI (efr. Fig.47).
Fig. 47

- A.I -
APPEND ICE
1. Vettore colonna
Indicato con il simbolo 4il vettore generico di componenti aI'
de d 1· . d' t'(*)e , eg 1 assl coor lna 1 ortogon~
Ie seguenti convenzioni per i vettori:
a e a sui versori ei ' et,2 3_
Ii [Xl' x2 ed x31si assumono
= [:3:]
2. Prodotto scalare: u.. II'" = t(1 t;;, -t U.l. VZ + I.V~ \/'3 •
3. Matrici (indicate con ,lettere maiuscole): )l
di componenti A , A , A , A , ..... e si indica:11 12 13 21
,
essendo A .. la generica componente.lJ
C=A+8 e .. = A .. + B ..lJ lJ lJ
(somma di matrici)
c A = S c A = Bij ij (prodotto di una matriceper uno scalare)

- A.2 -
4. Trasposta
Data una matrice A, di componenti A .., si definisce trasposta dilJ
A, e si indica can ~T, la matrice ottenuta scambiando Ie righe can
Ie colonne:
Can una notazione usualesiscriveanche
T
(A .. )= A ..
lJJl
II
traspostodiun vettore
colonna [::]e un vettore
riga
a.,T = [~"
Q.,,t~!'J.
5. Trasposta di un prodotto
-1 -1B A. Inversa di un prodotto
6. Una matrice e simmetrica se
A, .lJ
Aji < :>
ossia se gli elementi simmetricamente disposti rispetto alIa
diagonale principale sana uguali.
7. Prodotto di matrici
c = A8 c ..lJ
riga x colonna:3
Z A ~ h- BlLJ' = Q[1 .
It:o ~ •
.

- A.3 -
11 prodotto scalare ••••V' puo essere interpretato come un parti
colare prodotto matriciale tra il vettore tc.T (riga) e V' (colonna) :
8. Inversa di una matrice A (se esiste) e la matrice A-l tale che
I
9. Generazione di matrice (dal prodotto matriciale)
~ ~T= [::] [r,I"~
IA.,VtU •• 111
IlL
~] = Ullf.1 lit" VilA.t ~ I = A
I u~ V;f
(.{ oS Vi-/).. ~ 113
10. Sistemi di riferimento ortonormale
Se e~e il generico versore di un SR cartesiano, si dice che esso
e ortonormale se accade
8.•• e.::: -f ,
e.t - 8,1.::: ~ ,
In simboli
e.,- e~ :::0
e.~• e,.::: 0 ,
ossia il modulo dei versori e unitario (normalizzati) e i versori so
no ortogonali (SR ortogonale).

- A.4 -
Una matrice [. di componenti:
si chiama simbolo diKronaekere coincide con la matrice unitaria
BIBLIOGRAFIA
AA. VV. "Lezioni di Scienza dele Costruzioni" a cura dell'Istituto di Scienza
e Tecnica delle Costruzioni del Politecnico di Milano, Appendice,
Cleup, 1977.
O. Belluzzi
"Scienza delle Costruzioni", Vol.l, Cap.IV, Zanichelli, 1941.
A. Carpinteri
"La geometria delle Masse", Pitagora, 1981
L. Boscotrecase, A. Di Tommaso
"Statica applicata aIle Costruzioni", Appendice, Patron, 1976.
V. Feodossiev
"Resistenza dei Materiali", Cap. III, Editori Riuniti-Mir, 1977V. Franciosi
"Scienza delle Costruzioni", Vo1.2, Cap.I, Liguori, 1978.