articulo clca id 209
TRANSCRIPT
Diseño y Construcción de un Músculo Neumático y su
Aplicación en el Control de Posición de un Dedo Robótico
Fabio Abel Aguirre Cerrillo *, Ernesto Cancino Cruz*,
Marco Antonio Oliver Salazar**, Dariusz Szwedowicz Wasik***
*CENIDET, Centro Nacional de Investigación y Desarrollo Tecnológico
**Coordinación de Maestría en Ingeniería Mecatrónica
*** Departamento de Ingeniería Mecánica
Interior Internado Palmira s/n, Col. Palmira, C.P. 62490, Cuernavaca, Morelos, México
Tel. 01(777) 362-7770. Ext 212
Cuernavaca, Mor. 62490 México
E-mail: [email protected]
Resumen: En este trabajo se presenta el diseño y construcción de un músculo neumático de 3.5 mm de diámetro interior y los resultados de su caracterización. Se describen las pruebas de presión-desplazamiento y fuerza-desplazamiento realizadas al músculo. Se diseñó un dedo con tres falanges usando músculos neumáticos para controlar sus movimientos de flexión-extensión y aducción-abducción en lazo abierto y cerrado.
Palabras claves: Músculo neumático falange, dedo robótico, circuito neumático, modelo dinámico, flexión, extensión, aducción y abducción.
1. INTRODUCCION Se desarrollan robots para sustituir al ser humano en un gran número de actividades como las repetitivas, de precisión, tediosas y aquellas peligrosas o imposibles de realizar. Lo anterior motiva a buscar soluciones alternativas para la construcción de robots de tal manera que se asemejen, en lo mejor posible al ser humano tanto en movimientos como en la forma de generar movimientos. Una de las partes del cuerpo humano más versátil es la mano, siendo los músculos biológicos los responsables de movimientos para escribir, tomar objetos, etc. Los músculos biológicos sirven como referencia a emular debido a que presentan una excelente relación masa/rendimiento, son capaces de ejecutar movimientos ágiles y suaves, la conexión de los huesos con los tendones ocupa muy poco espacio y demuestran su eficiencia y duración cotidiana. Están compuestos de tejidos contráctiles que pueden contraerse y volver a recuperar su estado de relajación, por lo que sólo pueden ejercer fuerza de tracción. Para realizar un movimiento en ambas direcciones, se necesita de por lo menos un par de músculos puesto en contrapar (antagonismo), como por ejemplo se tienen el bíceps y el tríceps.
Una alternativa para emular al músculo biológico, es el músculo neumático que tiene su origen por el físico Joseph L. McKibben en década de los 50’s (Hesse, 2003). La emulación consiste en inyectar aire comprimido al músculo
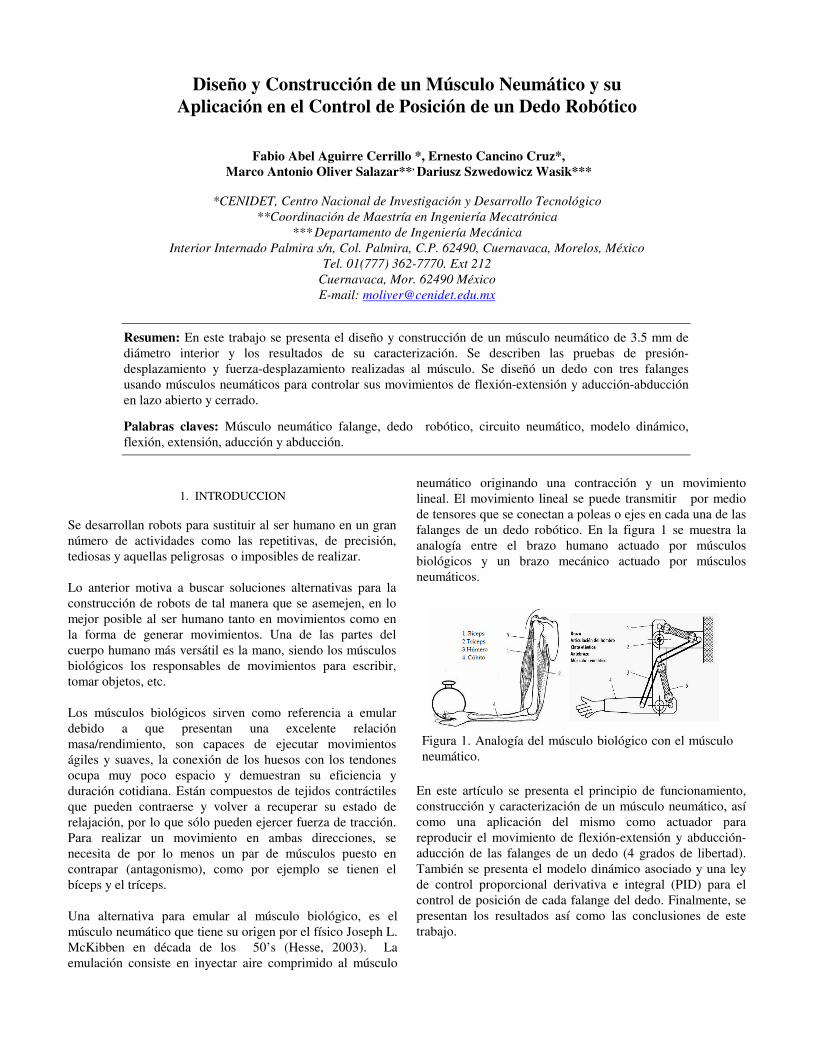
neumático originando una contracción y un movimiento lineal. El movimiento lineal se puede transmitir por medio de tensores que se conectan a poleas o ejes en cada una de las falanges de un dedo robótico. En la figura 1 se muestra la analogía entre el brazo humano actuado por músculos biológicos y un brazo mecánico actuado por músculos neumáticos.
En este artículo se presenta el principio de funcionamiento, construcción y caracterización de un músculo neumático, así como una aplicación del mismo como actuador para reproducir el movimiento de flexión-extensión y abducción-aducción de las falanges de un dedo (4 grados de libertad). También se presenta el modelo dinámico asociado y una ley de control proporcional derivativa e integral (PID) para el control de posición de cada falange del dedo. Finalmente, se presentan los resultados así como las conclusiones de este trabajo.
Figura 1. Analogía del músculo biológico con el músculo neumático.

2. FUNCIONAMIENTO DEL MÚSCULO NEUMÁTICO Y MÚSCULO CENIDET
El músculo neumático consiste de una membrana flexible y resistente a la tracción accionada por aire, otros gases o líquidos (figura 2). Su forma es cilíndrica y la relación entre la fuerza y la masa es de aproximadamente 400:1 (Hesse, 2003). Aplicando una presión interior, crece radialmente y decrece axialmente, con lo que se obtiene una fuerza de tracción y un movimiento de contracción a lo largo del músculo neumático. La fuerza de tracción es máxima al principio del movimiento de contracción y disminuye conforme aumenta la carrera. Comercialmente, el tamaño más pequeño de un músculo existente en el mercado es de 10 mm de diámetro interior (aunque la compañía FESTO® desarrolla actualmente un músculo con un diámetro interior de 5 mm. que no está disponible todavía en el mercado).
Figura 2. Forma reticular del músculo neumático. Dada la necesidad de contar con tamaños más pequeños a 10 mm en diámetro interior, se diseñó y construyó un músculo neumático (llamado músculo CENIDET) con un diámetro interior de 3.17 mm (figura 3). Este músculo está formado por un tubo flexible de latex, una malla metálica trenzada, pegamento, resina epóxica y conectores. Tiene 100 mm de longitud nominal, pesa 11 gramos y tiene una fuerza de tracción aproximada de 13 N con una presión de 5 bar para una contracción de 10 mm. La relación fuerza masa aproximada es de 1200 (Cancino, et al., 2007).
a) Músculo relajado sin presión
b) Músculo contraído por la presión.
Figura 3. Músculo neumático cenidet.
3. CARACTERIZACIÓN DEL MÚSCULO CENIDET Considérese el circuito neumático de la figura 4: Por medio de la válvula Y1 se controla el acceso de aire al músculo y
con la válvula Y2 se libera aire en el músculo. Las válvulas 0.01 y 0.02 son válvulas reguladoras de flujo. En la figura 5 se muestra el músculo cenidet unido a un resorte con una constante k = 500 N /m y una deformación inicial del resorte de 4 mm. La prueba en lazo abierto consiste en aplicar pulsos eléctricos a la bobina de la válvula Y1 para frecuencias y duración de pulsos controlados. Dichos pulsos eléctricos se traducen en incrementos de presión en el músculo para ser registrados. En la figura 6 se muestra la respuesta de presión en el tiempo para el sistema músculo-resorte al aplicar solo pulsos eléctricos con duración de 2 milisegundos a la bobina de la válvula Y1 a una frecuencia de 40 Hz. En un acercamiento de la figura 6, mostrado en la figura 7, se observan claramente los incrementos de presión en forma de escalones en el interior del músculo cenidet. En la figura 8 se muestra la respuesta para diferentes frecuencias y diferentes duraciones de pulsos. Se observa un compromiso entre frecuencia y duración de los pulsos para obtener una respuesta rápida con incrementos de presión moderados (continuos).
Figura 4. Esquema neumático de control músculo cenidet.
a). Esquema conceptual músculo-resorte.
b). Fotografía del sistema
Figura 5. Implementación del sistema músculo-resorte.

Figura 6. Grafica de respuesta de presión con 40 Hz y duración de pulso de 2 milisegundos.
Figura 7. Saltos de presión en forma de escalones en el interior del músculo.
Figura 8. Respuesta de presión en el músculo cenidet para diferentes casos. Se aplicó un control PID al sistema músculo-resorte con el apoyo del esquema neumático de la figura 4. En la figura 9 se muestra la respuesta en lazo cerrado para el sistema músculo-resorte utilizando la retroalimentación del sensor de presión para dos casos diferentes. En la figura 9a se observan las no linealidades debidas a la compresibilidad del aire en el músculo, mientras que en la figura 9b se presenta el perfil de descompresión del músculo. En ambos casos se cumple el objetivo de control de presión.
a) Control en lazo cerrado de 1 a 4 bar.
b) Control en lazo cerrado de 4 a 1 bar
Figura 9. Respuesta para el sistema músculo-resorte en lazo cerrado. Para una carga aproximada de 0.7 N y un desplazamiento del músculo de 1 cm., en la figura 10 se muestra el promedio de los resultados obtenidos para los músculos de 7, 8 y 10 cm de longitud. Figura 10. Diagrama presión-desplazamiento sin carga. Un diagrama fuerza-presión de músculos con longitudes de 7, 8, 9 y 10 cm. se presenta en la figura 11.
Diagrama Presión Vs Desplazamiento
0
100
200
300
400
500
600
700
800
900
1000
1100
0 50 100 150 200 250 300 350
Presión (Kpa)
Despla
zam
ien
to (
mm
)
7 cm
8 cm
10 cm

Figura 11. Diagrama fuerza-presión con carga.
4. MODELADO DEL SISTEMA. Una vez caracterizado el músculo neumático se procedió a aplicarlo como elemento de tracción en la conformación de un dedo con movimientos de flexión-extensión y aducción-abducción. El accionamiento de las falanges para el movimiento de flexión es por medio de músculos. El movimiento de extensión de las falanges se llevó acabo por medio de resortes, evitando la necesidad de músculos complementarios antagónicos. El movimiento de abducción y aducción se lleva acabo usando otro juego de músculo neumático y resorte. Para el modelo cinemático se usa el método de Denavit-Hartenberg para encontrar las relaciones de cada eslabón con su articulación a través de la siguiente matriz de transformación.
1
0
0 0 0 1
i i i i i i i
i i i i i i ii
i
i i i
Cos Cos Sin Sin Sin a Cos
Sin Cos Cos Sin Cos a SinA
Sin Cos d
θ α θ α θ θ
θ α θ α θ θ
α α−
− − =
(1)
La figura 12 muestra los sistemas de referencia para encontrar las matrices de transformación y en la Tabla 1 se presentan los parámetros del efector necesarios para utilizarlos en la matriz de transformación (1).
Figura 12. Asignación de ejes de referencia.
Tabla 1. Parámetros Denavit-Hartenberg
0L4
0θ4
4
0L3
0θ3
3
0L2
0θ2
2
90°L1
0θ1
1
αiaidiθi
i
0L4
0θ4
4
0L3
0θ3
3
0L2
0θ2
2
90°L1
0θ1
1
αiaidiθi
i
Para la cinemática directa la matriz de transformación general a lo largo de todo el sistema es:
0 0 0 1
0 0 0 1
x x x x
y y y y
z z z z
n o a p
n o a p n o a pT
n o a p
= =
(2)
donde los vectores n, o y a representan la orientación del sistema móvil 4 respecto al sistema fijo de referencia 0. El vector p representa la posición del sistema de referencia 4 (la posición de la punta de la falange distal) con respecto al sistema de referencia 0. Con esta transformación se pueden conocer todos los posibles puntos que conforman el espacio de trabajo del dedo.
Aplicando la inversa de la matriz de transformación (2) se obtienen las siguientes expresiones para los cuatro ángulos que conforman el dedo:
1 arctan y
x
p
pθ
=
, 2
22
arctanS
Cθ
=
33
3
arctanS
Cθ
=
, 4 234 2 3θ θ θ θ= − − (3)
donde 234θ puede tomar diversos valores pues la solución a
la dinámica inversa no es única. Se desarrolló un programa iterativo que calcula todas los posibles conjuntos de valores
que puede tomar 234θ para solucionar el problema
cinemático inverso a partir de todos los posibles valores de
3,2 θθ y 4θ . Los conjuntos de soluciones que no son
viables (ángulos negativos, ángulos fuera del espacio de trabajo, ángulos imaginarios, etc.) son eliminados. Para establecer el modelo dinámico se determinan los centros de masa de cada falange del dedo incluyendo la base que permite el movimiento de aducción-abducción según se observa en la figura 13.
Diagrama de Fuerza Vs Presión
300
350
400
450
5001.0
1.5
2.0
2.5
3.0
3.5
4.0
4.5
5.0
5.5
6.0
6.5
7.0
7.5
8.0
8.5
9.0
9.5
10.0
10.5
11.0
11.5
12.0
12.5
13.0
13.5
Fuerza (N)
Pre
sió
n (
KP
a)
7 cm
8 cm
9 cm
10 cm

x
y z
Origen del sistema de coordenadas
Falange distal
Falange medial
Falange proximal
Base para movimiento de aducción-abducción
Figura 13. Partes principales del dedo.
Con los centros de masa 4,3,2,1,,, =izyx iii , se
calcula la energía potencial total como la suma de la energía potencial de cada falange, es decir:
1 2 3 4TU U U U U= + + + (4)
donde 4,3,2,1,)( == ixgmqU iii , g = 9.81 m/s2.
Por su parte, la energía cinética total es la suma de la energía cinética de cada falange, es decir:
),(),(),(),(),( 4321
•••••
+++= qqKqqKqqKqqKqqKT
(5) donde
4,3,2,1,2
1
2
1),( 22 =+=
•
iwIvmqqK iiiii ,
Ii es el momento de inercia del i-esimo eslabón referido a su centro de masa y wi es la velocidad angular del i-esimo eslabón. Con la energías cinética y potencial se conforma el lagrangiano como
( ( ), ( ))T T
L q t q t U = Κ − � (6)
de forma que las ecuaciones de movimiento de Lagrange se calculan de
( , ) ( , )1,2,3,...
i
d L q q L q qi n
dt q qτ ι
∂ ∂ − = =
∂ ∂
� �
� �
(7)
donde iτ es el par ejercido externamente por el actuador de
la i-esima articulación. De esta forma las ecuaciones de movimiento de Lagrange para el dedo son
( ) ( , ) ( )M q q C q q q g q τ + + = �� � � (8)
donde M(q) es la matriz de inercia, ),(•
qqC es la matriz de
fuerzas centrípetas, centrífugas y de Coriolis y g(q) representa las fuerzas de gravedad.
En el modelo no se consideran los efectos de fricción ya que entre otras razones, el cálculo de los coeficientes de fricción no es trivial. Esto repercute en el error entre los resultados de simulación y experimentación.
5. CONTROL DEL SISTEMA.
Para controlar la posición de las falanges se utiliza un controlador proporcional derivativo integral (PID). Para el control de posición pura, se busca una ley de control τ para cada falange, que a partir de una posición deseada qd, permita que cada falange llegue a dicha posición. De esta forma τ es tal que (Kelly y Santibáñez, 2003): lim ( )
dt
q t q→∞
= (9)
La ley de control PID puede expresarse por medio de las
ecuaciones siguientes:
p v i
d
K q K q
q
q q q
τ ξ
ξ
= + + Κ
=
= −
�� �
� �
�
(10)
Donde Kp, Kv y Ki son las ganancias proporcional, derivativa e integral, respectivamente. La ecuación de malla cerrada para el control PID que se obtiene es:
1
p v i
I q k r q L mg sin q k r x
K q K q
q
ξ
ξ
2 + − + =
+ + Κ
=
��
�� �
� �
(11)
donde I es el momento de inercia de las falanges con respecto al eje de movimiento y τ es el par proporcionado por el músculo. Se considera que el resorte tiene una deformación inicial x1 y tomando en cuenta la relación existente entre el desplazamiento angular y lineal, la fuerza del resorte antagónico al músculo es:
1RF k x k r q = + (12)
En términos de las ecuaciones de movimiento de Lagrange el sistema resultante bajo la acción de un PID es
( ) ( , ) ( ) )R p d v iM q q C q q q g q T K q q K q ξ + + + = ( − − + Κ�� � � �
(13)
6. SENSADO DE POSICIÓN, ADQUISICIÓN Y PROCESAMIENTO DE SEÑALES.
La construcción del dedo con las tres falanges flexionadas y con movimiento de abducción-aducción se observan en las figuras 14a y 14b, respectivamente. Para medir los ángulos de giro, se montaron sensores de efecto Hall como se muestra en la figura 15. El sensor se monta en una tarjeta de circuito impreso mientras que un imán de samario-cobalto se incrusta

en el eje. Al girar el eje, gira el imán y el sensor detecta el cambio de posición dando un voltaje proporcional de salida.
a) b)
Figura 14. Fotografías de los movimientos de las falanges. a)Flexión-extensión. b) Abducción-aducción
Figura 15. Montaje del sensor de ángulo de giro. Para la adquisición de las señales eléctricas de posición se utilizó una tarjeta de Nacional Instruments (FPGA´s PCI-7831R). La programación se desarrolló por medio de Labview 7.1. Las señales de salida hacia las electroválvulas son del tipo PWM y se tiene una etapa de amplificación de potencia entre la tarjeta de FPGA y las electroválvulas. Las electroválvulas son de respuesta rápida con tiempos para la conexión y desconexión menor a 2 milisegundos.
7. RESULTADOS. Se realizaron pruebas de posición para movimientos de flexión-extensión de las falanges. Los resultados se muestran en las figuras 16 y 17. Como se observa en la figura 16, antes de llegar a la posición de 45°, se presenta un incremento abrupto de la posición de la falange proximal. Lo anterior es debido a la fricción existente en la falange proximal del dedo y a la compresibilidad del aire. El mismo fenómeno se presenta claramente dos veces en la figura 17, el primer caso alrededor de los 72° y el segundo alrededor de los 58°.
También, se procedió a realizar las pruebas de posición para el movimiento puro de abducción-aducción. Los resultados se observan en las figuras 18 y 19 donde se visualizan nuevamente las no linealidades debidas a la fricción y la compresibilidad del aire. En la figura 18 se muestra claramente esto, al inicio del movimiento y cerca de los -5°. De igual forma, en la figura 19 se muestra el movimiento de la falange acompañado de no linealidades.
Figura 16. Control de posición de la falange proximal con
movimiento de flexión de 0° a 45°.
Figura 17. Control de posición de la falange proximal con movimiento de extensión de 90° a 45°.
Figura 18. Control de posición de la falange con movimiento de abducción-aducción de -15° a 15°

Figura 19. Control de posición de la falange con movimiento de abducción-aducción de o° a -15° Otra prueba consistió en realizar movimientos simultáneos de las falanges. Particularmente, se realizó un movimiento de flexión y extensión en la falange proximal y se observó el efecto de dicho movimiento sobre el movimiento en el eje de aducción para detectar acoplamientos entre movimientos interfalángicos. El resultado se muestra en la figura 20, en donde la falange proximal va de 0° a 45° y se provoca un movimiento en el eje de aducción de aproximadamente 1.1° (acoplamiento). Se observa también que el movimiento de 1.1° es posteriormente corregido por el control encargado de aducción, llevándolo nuevamente a su posición de referencia.
Figura 20. Efecto del movimiento de flexión de la falange
proximal sobre el movimiento de aducción-abducción (acoplamiento).
Sin embrago, se detectaron rangos de operación en los cuales al moverse la falange proximal de 45° a 4°, la posición de aducción se mantiene invariable en -15° como se ve en la figura 21.
Figura 21. Efecto del movimiento de flexión de la falange proximal sobre el movimiento de aducción-abducción (sin acoplamiento). De manera experimental y bajo la acción de control de posición para cada falange mediante PID´s, se sometió al dedo a cambios externos bruscos de posición (disturbios) obteniendo que cada falange regresara a su posición de referencia. Los tiempos en que las falanges llegan a sus posiciones de referencia cambian según los valores del controlador PID, existiendo un compromiso entre rapidez y oscilación.
8. CONCLUSIONES
El músculo biológico es la referencia a emular ya que es un excelente actuador de simple efecto: Solo realiza trabajo de tracción, puede ejecutar movimientos ágiles y suaves y tiene una excelente relación masa/rendimiento. De igual forma a la anatomía humana, los actuadotes de las falanges del prototipo mecánico deben de ir en la parte del antebrazo. El prototipo del músculo neumático cenidet construido tiene similitudes de funcionamiento, de manera muy general, con el músculo biológico y es reproducible mediante la metodología desarrollada. Se obtuvieron movimientos de flexión-extensión y aducción-abducción mediante un juego de músculos neumáticos en antagonismo con un juego de resortes. Es posible la construcción de mecanismos robóticos basados en músculos neumáticos que se asemejen a elementos o partes del ser humano como dedos, manos o brazos. Con los valores del vector de ángulos θ, es posible conocer las posiciones cartesianas del extremo final del efector, y por tanto, el espacio de trabajo del efector, a través de la cinemática directa. Inversamente, dados los valores del vector de posición P, es posible, a través de la cinemática inversa, conocer los ángulos necesarios para alcanzar la posición P. El problema de la cinemática inversa tiene solución, sólo si, los puntos del vector P están dentro del espacio de trabajo y esta solución puede ser no única. La cantidad de soluciones que se pueden encontrar para la cinemática inversa depende de factores como la resolución del sensor utilizado y del error que se admita.

A partir de las ecuaciones de Euler-Lagrange se puede determinar el modelo dinámico del efector para movimientos de flexión y extensión. Una vez obtenido el modelo dinámico del efector es posible introducir una ley de control para posición pura. Para el modelo dinámico obtenido, el control de posición PID cumple con su objetivo de control de posición pura. Los movimientos de flexión/extensión y abducción/aducción se realizan por escalonamiento o tirones en algunos puntos de la trayectoria al pasar de una posición a otra. Lo anterior es debido a la fricción existente en las partes en movimiento del efector y la compresibilidad del aire. Además existe fricción entre el tubo flexible de látex y la malla metálica de cobre del músculo neumático.
La respuesta de presión y de posición del músculo es por pulsos y no continuo debido principalmente a la forma de control PWM en las válvulas, tanto en el sistema músculo-resorte como en las falanges del dedo construido.
9. AGRADECIMIENTOS
Agradecemos al Centro Nacional de Investigación y Desarrollo Tecnológico (CENIDET) por el apoyo otorgado y a la DGEST por el financiamiento dentro del proyecto 277.06-P, así como también al Centro Nacional de Actualización Docente (CNAD) por el apoyo recibido para la construcción del dedo robótico.
10. REFERENCIAS. Cancino, Ernesto, Aguirre, Fabio, Szwedowicsz, Dariusz,
Oliver, Marco Antonio y Bedolla, Jorge (2007). “Construcción y Caracterización un Músculo
Neumático para Aplicación en Robótica”. XIII Congreso Internacional Anual de la SOMIM y Congreso Internacional de Metal Mecánica 2007, ISBN 968-9763-02-2.
Festo (2007). www.festo.com. Kelly, Rafael y Santibáñez, Victor (2003) “Contro de
Movimientos de Robots Manipuladores”, Editorial Pearson Educación SA, Madrid.
Shadow (2006). http://www.shadowrobot.com. Zar (2007). http://www.zar-x.de. Hesse, Stefan, “El músculo neumático y sus aplicaciones”,
Blue Digest on Automation, Festo AG & Co. KG, Esslingen, Alemania, 2003.
Fuentes, Rogelio Santoyo y De Lara, Salvador Galindo “Corpus: Anatomía Humana General Volumen I”, Editorial trillas, México , 1997.
Anatomía funcional. FACCAFD.Granada.España 2006. http://www.ugr.es/~dlcruz/index.htm Barrientos, Antonio, Peñin, Luis Felipe, Balaguer, Carlos y
Aracil, Rafael, “Fundamentos de Robótica”, Editorial McGraw-Hill, Madrid, 1999.
Craig, John J. “Robotica”, Editorial Pearson Educación , México, 2006.
Sabed B. Niku. “Introduction to Robotics. Analysis, Systems,
Applications”, Editorial Pearson Education. United States of America, 2001.
Aguirre, Fabio Abel Cerrillo & Cancino, Ernesto Cruz, “Diseño de un efector que reproduzca algunos de la
mano humana usando recursos neumáticos”. Segundo reporte de avance. cenidet, Cuernavaca, México, 2007.
Beer, P. Ferdinand & Johnston, E. Russell, “Mecánica
vectorial para ingenieros: estática y dinámica” , Editorial McGraw Hill, México, 1998.
Martínez, Josué Román Mireles, “Controladores de Robots
Rígidos: Un Análisis Comparativo entre las
Metodologías de Control Clásico, Adaptable y
Robusto Basadas en el Método de Lyapunov”, cenidet, Cuernavaca, México, 2006.