autonomous guidancesystem for weeding robot in wet autonomous guidancesystem for weeding robot in...
TRANSCRIPT

Autonomous Guidance System for Weeding Robot
in Wet Rice Paddy
Choi, Keun Ha (14R55508)Department of Mechanical Engineering
Korea Advanced Institute of Science and Technology
Advisor In TITECH : Associate Professor Edwardo F. FUKUSHIMA/
FUKUSHIMA Robotics Lab.
Closing Ceremony 2014
’14. 8. 22

I. Introduction
Need to the robot in agricultureAging in agriculture population
Decrease the productivity and shortage of manpower
<2>
Weeding RobotsNeed to the robot, Problem of the hand weeder, riding weeder
Mechanization rate for weeding control 6.6%
Environment-friendly organic agricultural
[Hand weeder] [Riding weeder] [Weeding robot]
Autonomous

II. About Research
<3>
Autonomous Guidance System based-on IR Vision Sensor for Weeding Robot in Wet Rice Paddy- Robust to illumination condition- Improve the accuracy of rice row and guidance line + Low cost and Simple system
Process
Crop-soil(water)Discrimination
Crop row detection
Guidance line
Motion Control
Research progress
Crop row detection
[ SDI ]
[Single image / Static thresholding ]
Research results in KAIST
Research results in TITECH

II. About Research
<4>
System Architecture
NIRImage acquisition
Sequential difference Image (SDI)
Clustering rice pixels(K-means clustering)
Extract guidance lines
Gray images
Image subtract
Median filter
Thresholdering(OTSU method)
Crop segmentation
Evaluate guidance lines
Robot motion control
Yes
No
Extract the segmented crop line
Make the extended virtual line
Intersection distribution from lines
Line fitting(Robust regression) Robot guidance information
Research results in TITECH
Improving the algorithm
III. Concept of Algorithm
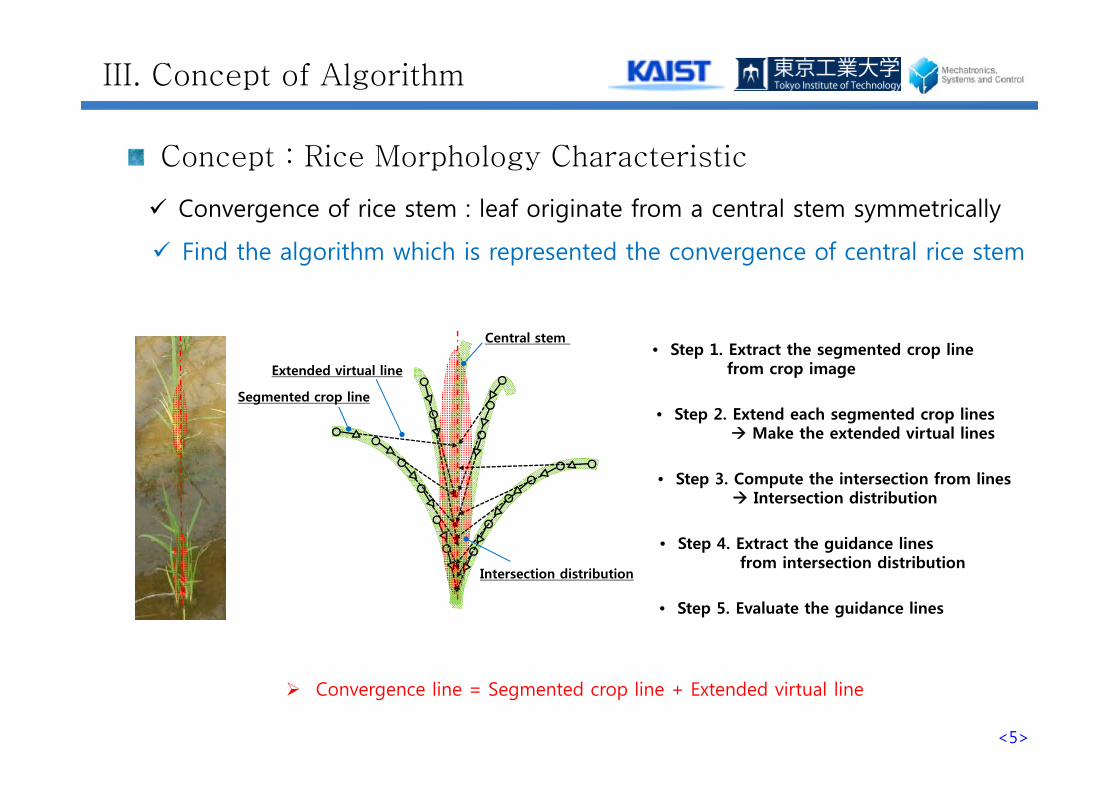
Concept : Rice Morphology Characteristic
<5>
Find the algorithm which is represented the convergence of central rice stem
• Step 1. Extract the segmented crop line from crop image
• Step 2. Extend each segmented crop lines Make the extended virtual lines
• Step 3. Compute the intersection from lines Intersection distribution
• Step 4. Extract the guidance lines from intersection distribution
• Step 5. Evaluate the guidance lines
Convergence line = Segmented crop line + Extended virtual line
Segmented crop line
Extended virtual line
Intersection distribution
Central stem
Convergence of rice stem : leaf originate from a central stem symmetrically
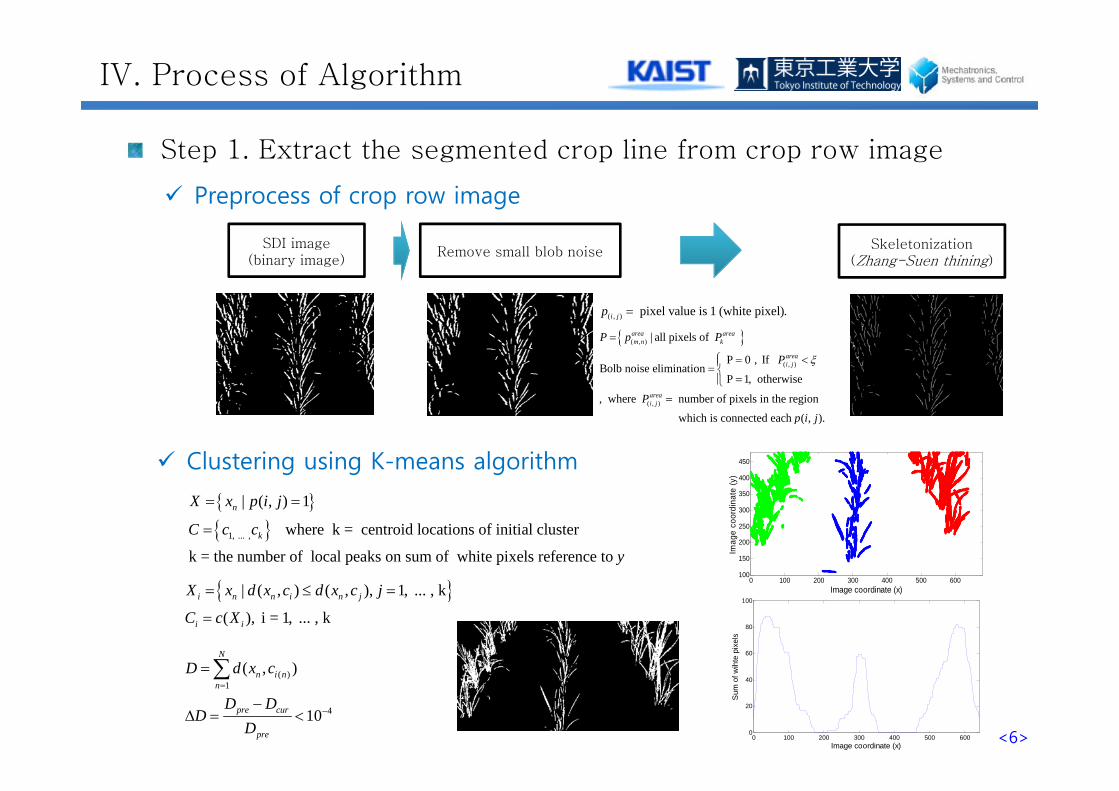
Step 1. Extract the segmented crop line from crop row image
<6>
Preprocess of crop row image
SDI image(binary image)
Remove small blob noiseSkeletonization
(Zhang-Suen thining)
Clustering using K-means algorithm
1, ... ,
| ( , ) 1
where k = centroid locations of initial cluster
k = the number of local peaks on sum of white pixels reference to
n
k
X x p i j
C c c
y
| ( , ) ( , ), 1, ... , k
( ), i = 1, ... , ki n n i n j
i i
X x d x c d x c j
C c X
( )1
4
( , )
10
N
n i nn
pre cur
pre
D d x c
D DD
D
( , )
( , )
( , )
| all pixels of
P 0 , If Bolb noise elimination
P 1, otherwise
, where number of pixels in the region
which is connec
area aream n k
areai j
areai j
P p P
P
P
ted each ( , ).p i j
( , ) pixel value is 1 (white pixel).i jp
IV. Process of Algorithm
0 100 200 300 400 500 600100
150
200
250
300
350
400
450
Image coordinate (x)
Imag
e co
ordi
nate
(y)
0 100 200 300 400 500 6000
20
40
60
80
100
Image coordinate (x)S
um o
f wih
te p
ixel
s

<7>
Segmented crop line
r
-80 -60 -40 -20 0 20 40 60 80
-500
-400
-300
-200
-100
0
100
200
300
400
500
a) Original image, (b) Skeletonized image, (c) Segmented lines (start point: circle, end point: cross, length: green line), (d) Extended virtual lines (start point: rectangle, end point: cross, length: blue line)
• Hough transform(Paul Hough, 1962)
- The classical Hough transform was concerned with the identification of lines in the image
IV. Process of Algorithm
<8>
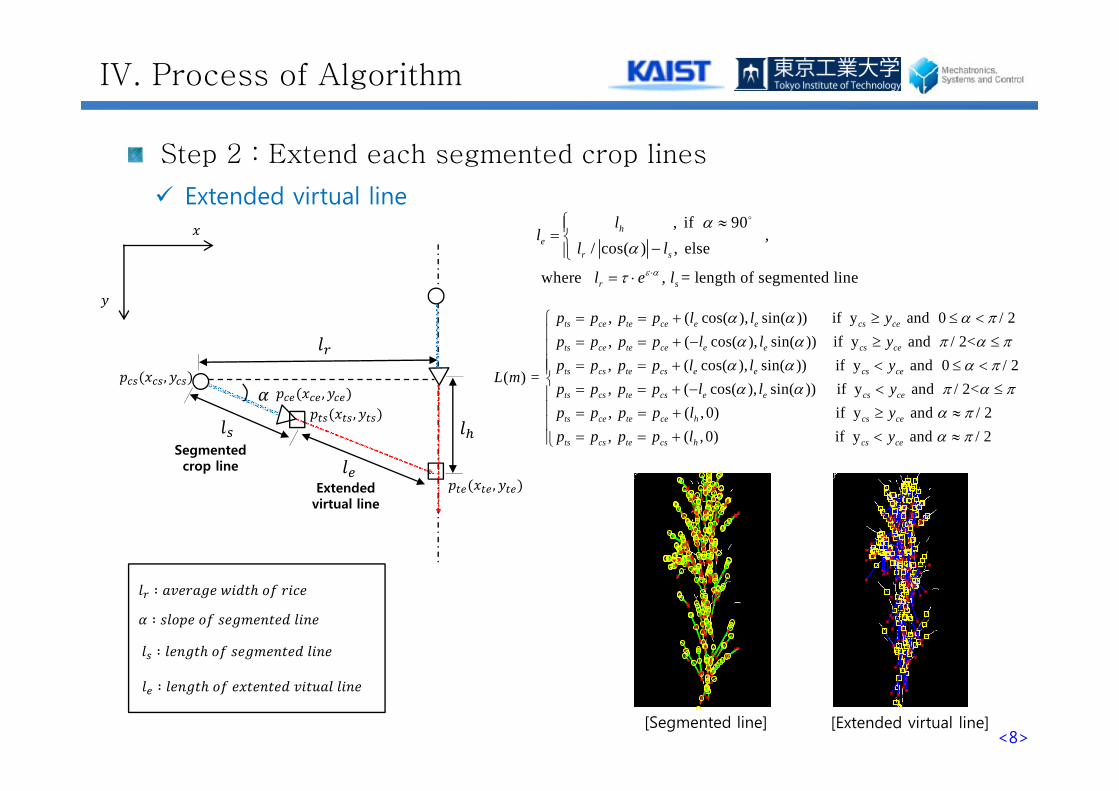
Step 2 : Extend each segmented crop lines
Extended virtual line
∶
∶
∶
∶
Segmentedcrop line
Extended virtual line
,
,,
,
, if 90 ,
/ cos( ) , else
where , = length of segmented line
he
r s
r s
ll
l l
l e l
, ( cos( ), sin( )) if y and 0 / 2 , ( cos( ), sin( )) if y and / 2<, ( cos( ), sin( )) if y and
( ) =
ts ce te ce e e cs ce
ts ce te ce e e cs ce
ts cs te cs e e cs ce
p p p p l l yp p p p l l yp p p p l l y
L m
0 / 2
, ( cos( ), sin( )) if y and / 2<, ( , 0) if y and / 2, ( , 0)
ts cs te cs e e cs ce
ts ce te ce h cs ce
ts cs te cs h
p p p p l l yp p p p l yp p p p l
if y and / 2cs cey
[Segmented line] [Extended virtual line]
IV. Process of Algorithm
<9>
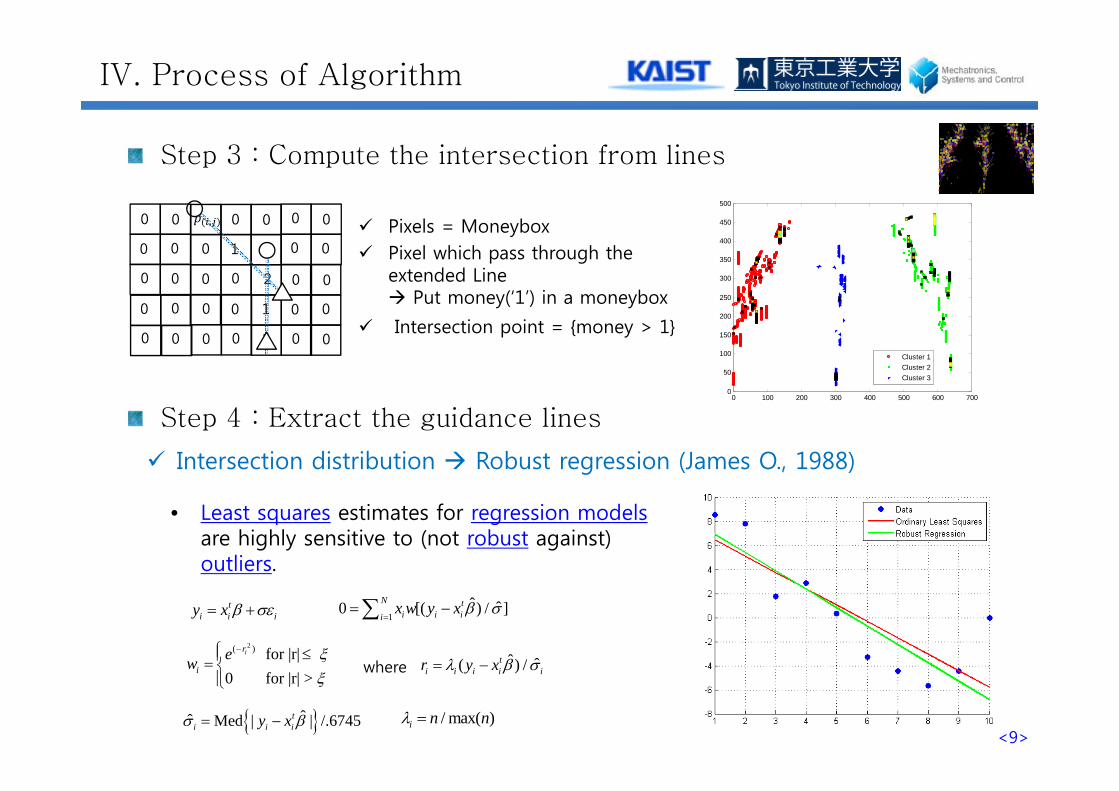
Step 3 : Compute the intersection from lines
Step 4 : Extract the guidance lines
1
20
0
0 0
0
0
01
1
0 0
0
0
,
0
0
0 0
0
0
0
0
0
0
0
0
0
0
0
0 0
0
Intersection distribution Robust regression (James O., 1988)
• Least squares estimates for regression modelsare highly sensitive to (not robust against) outliers.
Pixels = Moneybox Pixel which pass through the
extended Line Put money(‘1’) in a moneybox
Intersection point = {money > 1}
0 100 200 300 400 500 600 7000
50
100
150
200
250
300
350
400
450
500
Cluster 1Cluster 2Cluster 3
ti i iy x 1
ˆ ˆ0 [( ) / ]N ti i ii
x w y x
2( ) for |r|
0 for |r| >
ir
iew
ˆ ˆ( ) /ti i i i ir y x
ˆˆ Med | | /.6745ti i iy x / max( )i n n
where
IV. Process of Algorithm

V. Experiments
Results
<10>
0 100 200 300 400 500 600 7000
50
100
150
200
250
300
350
400
450
500
Cluster 1Cluster 2Cluster 3
(red: LSE, green: robust regression)
[Intersection point]
[Guidance line]

VI. Campus life in TITECH
<11>
Advisor
Travel
Friends
Healing!