bab 1 jenis dan struktur robot
TRANSCRIPT

BAB 1
JENIS DAN STRUKTUR ROBOT
1.1. Jenis dan Struktur Robot
Robot dapat dibedakan menjadi dua jenis yakni robot manipulator (lengan robot)
dan robot mobil. Penentuan posisi lengan robot dapat diperkirakan dan dihitung
dengan menggunakan Konversi Denavit-Hartenberg. Sedangkan posisi dari robot
mobil dapat ditentukan dengan menggunakan persamaan Ackerman Steering,
Differential Kinematics dan lainnya. Pada perkuliahan ini akan dibahas lebih detail
tentang perhitungan dalam menentukan posisi ujung lengan robot dan posisi robot
mobil terhadap titik referensi atau titik awal.
Sebuah sistem robot terdiri dari beberapa bagian seperti yang ditunjukkan pada
Gambar 1.1. Robot merupakan piranti pembantu kerja manusia yang beroperasi
berdasar masukan pada input device. Robot mempunyai bagian mekanik yang
dikendalikan oleh komputer atau controller. Unit pengendali robot atau controller
bekerja berdasar sinyal dari sensor dan masukan yang diinginkan oleh pengguna.
Penggunaan robot manipulator di industry bersifat fleksibel sesuai kebutuhan.
Beberapa peralatan penunjang seperti mesil las, mesin bor dan lain-lain diletakkan pada
ujung dari robot manipulator.
Gambar 1.1 Bagian Penyusun Sistem Robot

1.2. Robot Manipulator
Sebuah robot manipulator terdiri dari:
1. Joint, merupakan bagian robot yang mampu melakukan pergerakan. Bentuk
fisik dari joint biasanya berupa motor atau penggerak pneumatic.
2. Link, merupakan bagian robot yang menghubungkan antar joint. Bagian link
pada robot biasanya berupa plastic, besi atau bahan keras lainnya.
Berdasarkan pergerakannya, joint sebuah robot dapat dibedakan menjadi dua
jenis, yakni:
Revolute joint, merupakan penggerak robot yang melakukan gerakan memutar.
Motor listrik merupakan jenis revolute joint yang sering digunakan. Motor listrik atau
motor elektrik dapat dibedakan menjadi tiga jenis yakni dc motor, stepper motor dan
servo motor. DC motor sering kita jumpai pada mainan anak-anak. Stepper motor
sering kita temui pada mesin printer. Karakteristik dari stepper motor adalah gerakan
yang terpatah- patah per step. Semakin kecil sudut perputaran tiap step pada umumnya
semakin mahal motor tersebut. Motor servo mampu melakukan gerakan memutar
sebanyak sudut tertentu. Motor servo sering digunakan sebagai joint revolute pada
lengan robot berdimensi kecil. Sedangkan lengan robot yang lebih besar sering
menggunakan motor stepper.
Prismatic joint, merupakan penggerak robot yang mampu melakukan gerakan
memanjang dan memendek. Sistem pneumatic sering digunakan sebagai prismatic
joint karena kemampuannya memanjang dan memendek. Gambar 1.2 menunjukkan
representasi symbolic dari joint robot.
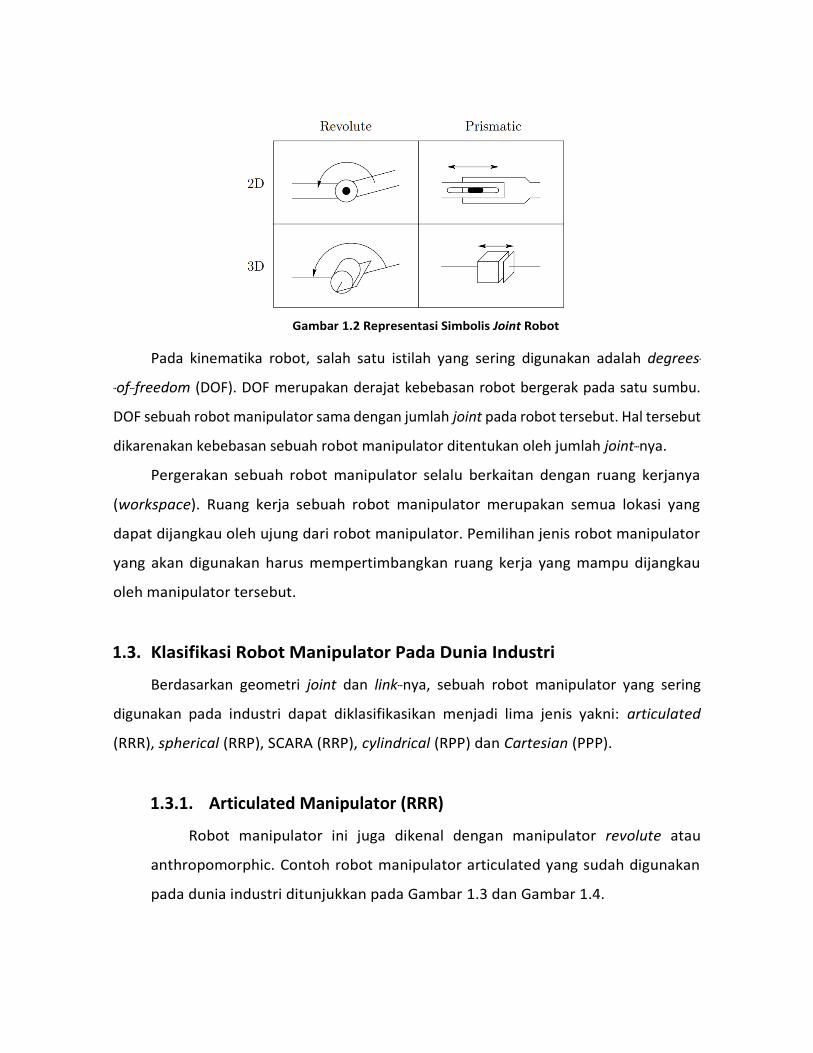
Gambar 1.2 Representasi Simbolis Joint Robot
Pada kinematika robot, salah satu istilah yang sering digunakan adalah degrees-
of-freedom (DOF). DOF merupakan derajat kebebasan robot bergerak pada satu sumbu.
DOF sebuah robot manipulator sama dengan jumlah joint pada robot tersebut. Hal tersebut
dikarenakan kebebasan sebuah robot manipulator ditentukan oleh jumlah joint-nya.
Pergerakan sebuah robot manipulator selalu berkaitan dengan ruang kerjanya
(workspace). Ruang kerja sebuah robot manipulator merupakan semua lokasi yang
dapat dijangkau oleh ujung dari robot manipulator. Pemilihan jenis robot manipulator
yang akan digunakan harus mempertimbangkan ruang kerja yang mampu dijangkau
oleh manipulator tersebut.
1.3. Klasifikasi Robot Manipulator Pada Dunia Industri
Berdasarkan geometri joint dan link-nya, sebuah robot manipulator yang sering
digunakan pada industri dapat diklasifikasikan menjadi lima jenis yakni: articulated
(RRR), spherical (RRP), SCARA (RRP), cylindrical (RPP) dan Cartesian (PPP).
1.3.1. Articulated Manipulator (RRR)
Robot manipulator ini juga dikenal dengan manipulator revolute atau
anthropomorphic. Contoh robot manipulator articulated yang sudah digunakan
pada dunia industri ditunjukkan pada Gambar 1.3 dan Gambar 1.4.
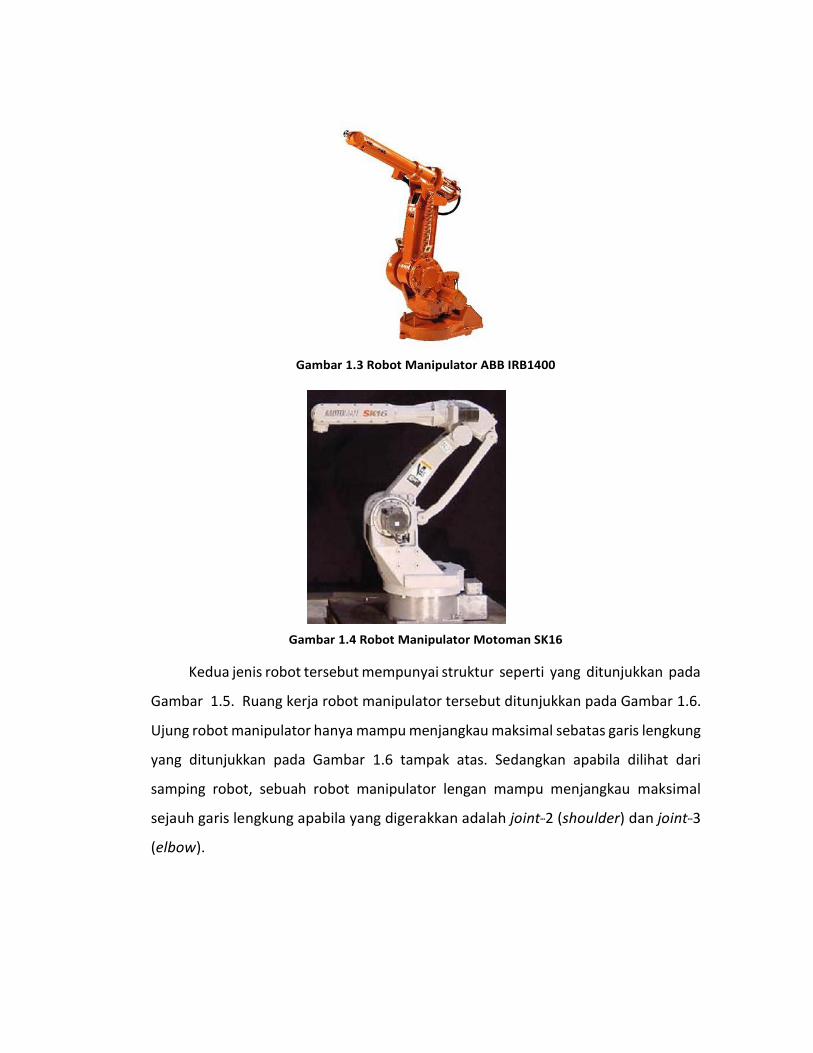
Gambar 1.3 Robot Manipulator ABB IRB1400
Gambar 1.4 Robot Manipulator Motoman SK16
Kedua jenis robot tersebut mempunyai struktur seperti yang ditunjukkan pada
Gambar 1.5. Ruang kerja robot manipulator tersebut ditunjukkan pada Gambar 1.6.
Ujung robot manipulator hanya mampu menjangkau maksimal sebatas garis lengkung
yang ditunjukkan pada Gambar 1.6 tampak atas. Sedangkan apabila dilihat dari
samping robot, sebuah robot manipulator lengan mampu menjangkau maksimal
sejauh garis lengkung apabila yang digerakkan adalah joint-2 (shoulder) dan joint-3
(elbow).

Gambar 1.5 Struktur Robot Manipulator Lengan
Gambar 1.6 Ruang Kerja Robot Manipulator Lengan
1.3.2. Spherical Manipulator (RRP)
Robot manipulator spherical merupakan jenis robot manipulator yang
menggunakan joint revolute pada body, joint revolute pada shoulder dan joint
prismatic pada elbow. Gambar 1.7 merupakan salah satu bentuk fisik dari robot
manipulator spherical. Struktur lengan robot jenis ini ditunjukkan pada Gambar
1.8. Pada struktur robot manipulator ini semua sumbu pada tiap-tiap joint saling
tegak lurus. Penentuan arah sumbu akan dibahas lebih lanjut pada bab
kinematika robot. Ruang kerja dari manipulator spherical ditunjukkan pada
Gambar 1.9.

Gambar 1.7 Lengan Robot Stanford
Gambar 1.8 Struktur Robot Manipulator Spherical
Gambar 1.9 Ruang Kerja Manipulator Spherical

1.3.3. Robot Manipulator SCARA (RRP)
SCARA merupakan kepanjangan dari Selective Complain Articulated Robot
for Assembly. Gambar 1.10 merupakan struktur dari robot manipulator SCARA.
Manipulator jenis ini tersusun dari joint revolute (R) pada body, joint revolute (R)
pada shoulder dan joint prismatic (P) pada elbow. Sehingga struktur robot jenis ini
dikenal dengan struktur RRP. Bentuk fisik manipulator SCARA ditunjukkan pada
Gambar 1.11. Manipulator SCARA bekerja pada titik-titik lokasi yang berada di
bawah manipulator. Ruang kerja yang dapat dijangkau oleh manipulator SCARA
ditunjukkan dalam Gambar 1.12.
Gambar 1.10 Struktur Robot Manipulator SCARA
Gambar 1.11 SCARA Manipulator EPSON

Gambar 1.12 Ruang Kerja Manipulator SCARA
1.3.4. Robot Manipulator Cylindrical (RPP)
Manipulator cylindrical merupakan jenis robot manipulator yang bekerja
sesuai dengan sistem koordinat silinder. Bentuk fisik manipulator cylindrical
ditunjukkan pada Gambar 1.13. Struktur robot jenis ini terdiri dari joint revolute
pada body, joint prismatic pada shoulder dan elbow. Konfigurasi manipulator ini
dikenal juga dengan jenis RPP. Struktur robot manipulator cylindrical ditunjukkan
pada Gambar 1.14. Ruang kerja yang dapat dijangkau oleh manipulator jenis ini
menyerupai silinder seperti yang ditunjukkan dalam Gambar 1.15.
Gambar 1.13 Robot Manipulator Seiko RT3300
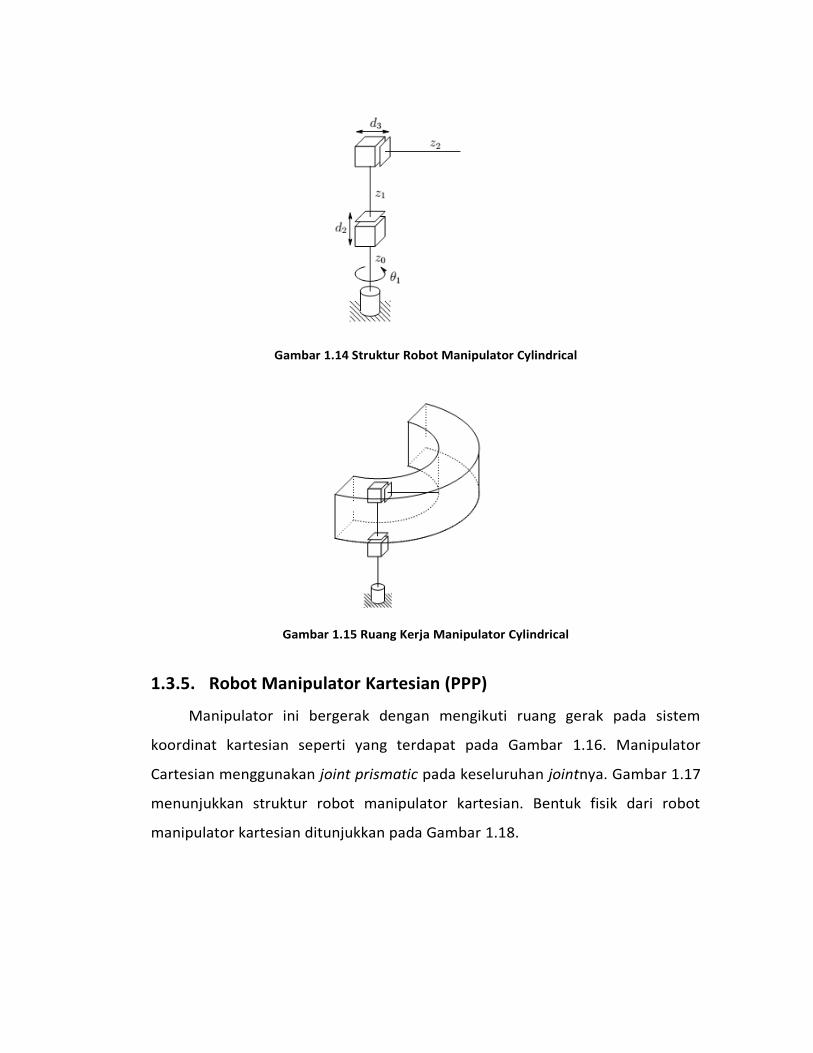
Gambar 1.14 Struktur Robot Manipulator Cylindrical
Gambar 1.15 Ruang Kerja Manipulator Cylindrical
1.3.5. Robot Manipulator Kartesian (PPP)
Manipulator ini bergerak dengan mengikuti ruang gerak pada sistem
koordinat kartesian seperti yang terdapat pada Gambar 1.16. Manipulator
Cartesian menggunakan joint prismatic pada keseluruhan jointnya. Gambar 1.17
menunjukkan struktur robot manipulator kartesian. Bentuk fisik dari robot
manipulator kartesian ditunjukkan pada Gambar 1.18.

Gambar 1.16 Ruang Kerja Manipulator Kartesian
Gambar 1.17 Struktur Robot Manipulator Kartesian
Gambar 1.15 Robot Manipulator Epson

BAB 2
SISTEM KOORDINAT
2.1. Sistem Koordinat
Dalam geometri, sistem koordinat sering digunakan sebagai ukuran untuk
menunjukkan lokasi dari suatu titik. Sistem koordinat dapat dibedakan menjadi tiga
yakni: sistem koordinat kartesian, sistem koordinat silinder dan sistem koordinat bola.
2.1.1. Sistem Koordinat Kartesian
Sistem koordinat kartesian terdiri dari sumbu-x, sumbu-y dan sumbu-z.
Setiap sumbu dalam sistem koordinat kartesian saling tegak lurus antara satu dengan
lainnya. Gambar 2.1 merupakan representasi dalam menentukan posisi pada sistem
korrdinat kartesian. Dalam menentukan sumbu pada sistem koordinat kartesian
menggunakan aturan tangan kanan dalam memutar sekrup. Gambar 2.2
menunjukkan arah tiap sumbu berdasar prinsip tangan kanan. Perputaran dari
sumbu-x positif ke sumbu-y positif akan menghasilkan gerakan sekrup (naik/turun)
searah sumbu-z positif.
Gambar 2.1 Sistem Koordinat Kartesian

Gambar 2.2 Penentuan Sumbu Sistem Kartesian
2.1.2. Sistem Koordinat Silinder
Sistem koordinat silinder merupakan bentuk representasi posisi
menggunakan bentuk silinder. Sistem koordinat ini terdiri dari jari-jari silinder (ρ
at au r ), sudut putar (φ) dan ketinggian silinder (z). Gambar 2.3 memberikan
penjelasan cara merepresentasikan posisi menggunakan sistem koordinat
silinder.
Gambar 2.3 Sistem Koordinat Silinder
2.1.3. Sistem Koordinat Bola
Sistem koordinat bola adalah jenis sistem koordinat yang menggunakan ruang
bola dalam merepresentasikan posisi. Sistem koordinat ini terdiri dari tiga informasi
yakni jari-jari (r), sudut putar kutub (θ) dan sudut putar azimuth (φ). Gambar 2.4

menggambarkan representasi posisi dalam sistem koordinat bola.
Gambar 2.4 Sistem Koordinat Bola
Representasi posisi antara satu sistem koordinat dengan sistem koordinat
lainnya dapat dikonversikan. Hal ini diperlukan karena antara satu referensi
dengan referensi lain terkadang hanya menggunakan satu sistem koordinat saja.
Konversi antara sistem koordinat kartesian dengan sistem koordinat silinder
dilejaskan dengan persamaan berikut.
Konversi sistem koordinat bola kedalam sistem koordinat kartesian
dijelaskan melalui persamaan berikut.


BAB 3
MATRIK HOMOGENOUS DAN MATRIK TRANSFORMASI
3.1 Representasi Posisi
Kinematika robot difokuskan pada cara merepresentasikan sistem koordinat
untuk menentukan posisi dan orientasi komponen penyusun robot manipulator (joint
dan link). Pada bab ini akan dibahas lebih lanjut tentang representasi posisi dan
orientasi dalam bentuk matrik homogenous. Matrik homogenous merupakan
gabungan operasi rotasi/perputaran dan translasi/pergeseran.
Gambar 3.1 Representasi Posisi menggunakan Dua Sistem Koordinat
Posisi sebuah titik dapat direpresentasikan ke dalam sebuah vektor.
Nilai vektor untuk titik yang sama tergantung dari penentuan sistem
koordinat. Sebagai gambaran awal perhatikan Gambar 3.1. Sebuah titik P
dapat direpresentasikan posisinya menjadi persamaan berikut.
Titik p dapat direpresentasikan dengan 5 vektor satuan sumbu-x dan 6 vektor
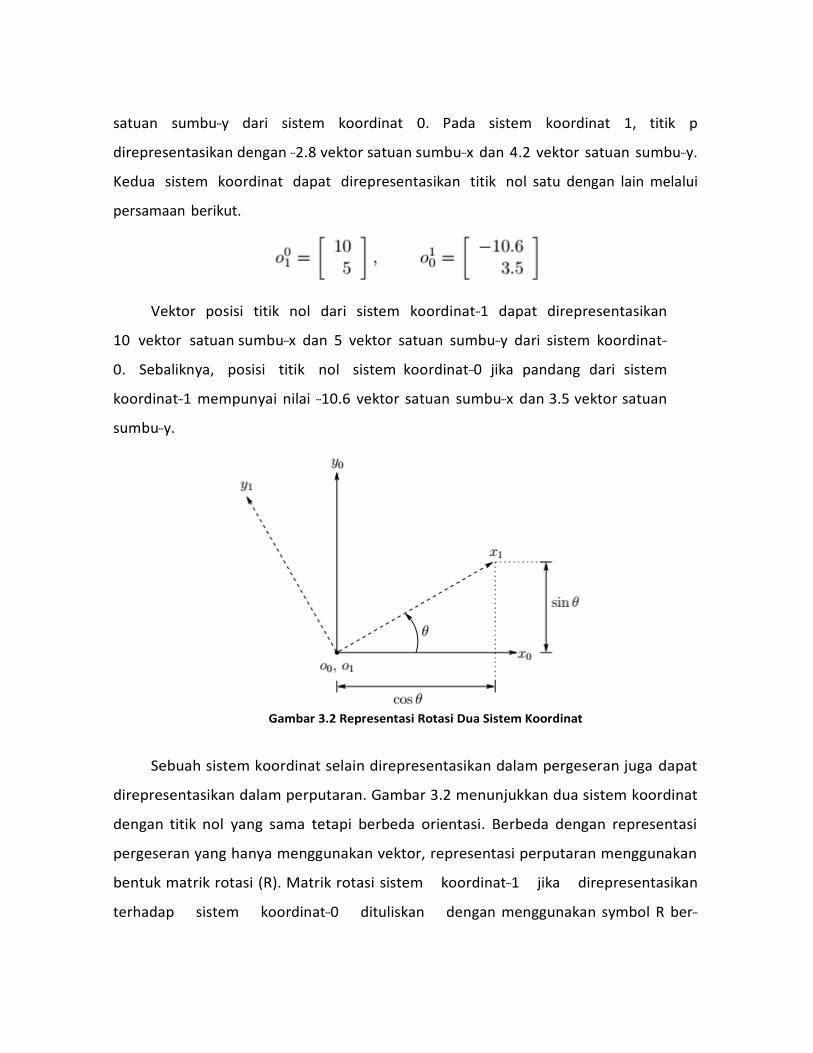
satuan sumbu-y dari sistem koordinat 0. Pada sistem koordinat 1, titik p
direpresentasikan dengan -2.8 vektor satuan sumbu-x dan 4.2 vektor satuan sumbu-y.
Kedua sistem koordinat dapat direpresentasikan titik nol satu dengan lain melalui
persamaan berikut.
Vektor posisi titik nol dari sistem koordinat-1 dapat direpresentasikan
10 vektor satuan sumbu-x dan 5 vektor satuan sumbu-y dari sistem koordinat-
0. Sebaliknya, posisi titik nol sistem koordinat-0 jika pandang dari sistem
koordinat-1 mempunyai nilai -10.6 vektor satuan sumbu-x dan 3.5 vektor satuan
sumbu-y.
Gambar 3.2 Representasi Rotasi Dua Sistem Koordinat
Sebuah sistem koordinat selain direpresentasikan dalam pergeseran juga dapat
direpresentasikan dalam perputaran. Gambar 3.2 menunjukkan dua sistem koordinat
dengan titik nol yang sama tetapi berbeda orientasi. Berbeda dengan representasi
pergeseran yang hanya menggunakan vektor, representasi perputaran menggunakan
bentuk matrik rotasi (R). Matrik rotasi sistem koordinat-1 jika direpresentasikan
terhadap sistem koordinat-0 dituliskan dengan menggunakan symbol R ber-

superscript 0 seperti pada persamaan berikut.
Matrik rotasi merupakan gabungan dari representasi satu vektor satuan x dan y dari
sistem koordinat-1 pada sistem koordinat-0. Berdasarkan Gambar 24, satu vektor
satuan-x sistem koordinat-1 setara dengan cosθvektor satuan-x dan sinθ vektor
satuan-y sistem koordinat-0. Informasi ini dinotasikan dengan x subscript 1 superscript
0. Sedangkan untuk satu vektor satuan-y sistem koordinat-1 setara dengan (-sinθ)
sumbu-x dan cosθsumbu-y sistem koordinat-0. Bentuk komplek dari matrik rotasi
dalam 2-dimensi dituliskan pada persamaan berikut.
Simbol x subscript-1 merupakan posisi pada sistem koordinat-1. Simbol x
subscript-0 merupakan ukuran setara dari satu vektor satuan-x sistem koordinat-1
pada sistem koordinat-0. Representasi matrik rotasi pada ruang 3-dimensi dijelaskan
menggunakan persamaan berikut.
Gambar 3.3 merupakan ilustrasi perputaran sistem koordinat kartesian-1 terhadap
kartesian-0. Kedua sistem koordinat diputar pada sumbu-z, sehingga nilai z pada

kedua sistem koordinat tidak ada perubahan. Kondisi ini dapat direpresentasikan dengan
nilai 1 pada matrik. Pada saat terjadi perputaran, satu satuan sumbu-x sistem koordinat-
1 saling tegak lurus dengan sumbu-z sistem koordinat-0. Akibat yang terjadi adalah
representasi sumbu-x bernilai 0 pada sumbu-z. Hal yang sama juga berlaku
sebaliknya. Keseluruhan representasi 3-dimensi dituliskan dalam persamaan matrik
rotasi berikut.
Gambar 3.3 Rotasi Kedua Sistem Koordinat
3.2 Matrik Homogenous
Matrik homogenous merupakan representasi matrik dari perubahan
translasi/pergeseran dan rotasi/perputaran dari sebuah sistem koordinat. Matrik
homogenous merupakan gabungan vektor posisi (d) yang digunakan dalam translasi
dan matrik rotasi (R). Bentuk dasar matrik homogenous dijabarkan pada persamaan

berikut.
Representasi sebuah sistem koordinat terhadap sistem koordinat lainnya dapat
dituliskan dalam matrik homogenous. Gerak dasar yang dapat dilakukan terhadap sebuah
sistem koordinat adalah pergeseran sepanjang sumbu-x,y,z dan perputaran dengan
sumbu-x,y,z. Keenam gerakan dasar tersebut dapat dituliskan ke dalam bentuk matrik
homogenous berikut.
Notasi Transx,a menjelaskan bahwa sistem koordinat digeser sepanjang sumbu-
x sejauh a. Notasi Rotx, α menjelaskan bahwa sistem koordinat diputar pada sumbu-
x dengan sudut α . Representasi umum dari sebuah matrik homogenous dijelaskan pada
persamaan berikut.

Vektor n merepresentasikan arah dari vektor satuan-x. Vektor s merepresentasikan
arah dari vektor satuan-y. Vektor a merepresentasikan arah dari vektor satuan-z. Vektor
d merepresentasikan pergerakan titik nol sebuah koordinat terhadap koordinat lain.
Bentuk yang paling umum dari matrik homogenous dijelaskan pada persamaan
berikut.

BAB 4
FORWARD KINEMATICS
4.1 Forward Kinematics (2 Axes)
Kinematika maju atau forward kinematics merupakan perhitungan dalam
menentukan posisi ujung robot manipulator terhadap sistem koordinat yang
disebabkan oleh perubahan tiap – tiap joint penyusunnya. Sebelum melakukan
perhitungan posisi perlu disepakati terlebih dahulu sistem koordinat yang digunakan,
kemudian penempatan masing – masing sumbu koordinat serta posisi titik nol
koordinat. Pada dunia nyata, sistem koordinat dan sumbu koordinat merupakan garis
bantu imajiner yang digunakan untuk memudahkan dalan menentukan posisi. Sistem
koordinat kartesian merupakan jenis koordinat yang sering digunakan.
Gambar 4.1 Robot Manipulator Dua Link
Berdasarkan dari Gambar 4.1 akan lebih membantu dalam memahami prinsip
dari kinematika maju. Pada Gambar 4.1 terlihat sebuah lengan robot atau robot
manipulator mempunyai dua joint dan dua link. Hal tersebut berarti untuk mengubah
posisi akhir dari ujung manipulator, robot dapat melakukan perubahan posisi dari salah

satu atau pun kedua joint-nya. Setiap joint memerlukan sistem koordinat lokal untuk
menjelaskan perubahan joint terhadap joint sebelumnya. Pergerakan joint-0 dapat
direpresentasikan dengan menggunakan sistem koordinat-0, sumbu x-0 dan y-0 tidak
berpindah dan menempel pada dasar robot. Sistem koordinat-0 dapat disebut juga
sebagai sistem koordiant global karena tidak mengalami perpindahan tempat. Sistem
koordinat-1 merupakan sistem koordinat lokal yang digunakan untuk
merepresentasikan pergerakan joint-1, sumbu x-1 dan y-1 melekat pada bahu
manipulator atau hanya berpindah jika joint-0 berputar. Sumbu x-2 dan y-2 bersatu
dengan link lengan dan hanya berpindah jika joint-1 berubah. Kemudian bagaimana
cara menentukan posisi ujung manipulator terhadap sistem koordinat dasar dapat
dihitung dengan menggunakan persamaan trigonometri sederhana sebagai berikut.
Notasi 1 merupakan panjang dari link-0 dan 2 merupakan panjang dari link-1.
Dengan menggunakan persamaan tersebut, maka dapat dihitung posisi dari ujung lengan
robot terhadap sistem koordinat global.
4.2 Konversi Denavit-Hartenberg (Forward Kinematics with 3 Axes)
Konversi Denavit-Hartenberg (DH) merupakan teknik untuk memudahkan dalam
menentukan persamaan kinematika maju dari lengan robot atau robot manipulator
pada ruang 3-dimensi. Konversi DH akan menghasilkan sebuah matriks homogenous
dengan notasi T yang melambangkan keseluruhan perubahan dari semua joint
penyusunnya. Posisi akhir dari ujung lengan robot dapat diketahui dengan melakukan
perkalian matriks homogenous dengan vektor posisi seperti yang dijelaskan pada
persamaan berikut.

Notasi v merupakan vektor posisi ujung lengan terhadap sistem koordinat global,
sedangkan notasi 𝑣𝑛𝑛−1 merupakan vektor posisi ujung manipulator terhadap sumbu
koordinat lokal terakhir. Matriks homogenous T menghasilkan nilai vektor lokasi global
melalui perkalian dengan vektor posisi lokal. Matriks homogenous keseluruhan T
diperoleh melalui hasil perkalian dari masing – masing matriks homogenous antar
sistem koordinat. Matriks T dapat dihitung melalui persamaan berikut.
𝑇 = 𝐴1. 𝐴2. 𝐴3…𝐴𝑛
Matriks homogenous antar sistem koordinat dihitung melalui hasil perkalian
matriks rotasi dan translasi terhadap sumbu-z dan sumbu-x. Persamaan berikut ini
menjelaskan operasi perkalian yang dihasilkan pada tiap – tiap sistem koordinat.
Pada matriks homogenous A terdapat 4 (empat) variabel yang digunakan, yakni
i, i, di, dan ai yang secara berurutan didefinisikan sebagai sudut joint, perputaran link,
offset link, dan panjang link. Nilai positif dari sudut putarnya ditentukan pada Gambar

4.2, sedangkan nilai negatifnya ditentukan pada arah kebalikannya.
Gambar 4.2 Sudut Putar Positif
Langkah – langkah konversi DH adalah sebagai berikut:
1. Tentukan sumbu-z pada tiap – tiap joint. Sumbu-z merupakan sumbu putar
joint revolute sedangkan pada joint prismatic, sumbu-z searah dengan sumbu
perpanjangan atau perpendekannya.
2. Gambarkan sistem koordinat dasar atau global sesuai dengan sumbu-z0.
Gunakan aturan tangan kanan dalam menentukan sumbu-x0 dan sumbu-y0.
Untuk setiap joint pada robot manipulator ulangi langkah 3 hingga 5:
3. Tentukan titik nol oi pada tiap – tiap joint. Jika zi dan zi-1 saling tegak lurus,
maka titik oi terletak pada perpotongannya. Jika zi dan zi-1 sejajar, maka titik oi
dapat diletakkan dimana saja sepanjang sumbu-zi.
4. Gambar sumbu-xi sepanjang garis normal antara sumbu zi dan zi-1 melewati
oi, apabila zi dan zi-1 saling tegak lurus. Sedangkan jika zi dan zi-1 sejajar, maka
gambarkan sumbu-xi searah link.
5. Gambar sumbu-yi dengan mengikuti aturan tangan kanan.
6. Gambar titik on pada ujung manipulator dan gambarkan semua sumbu
koordinatnya mengikuti sistem koordinat sebelumnya.
7. Buat tabel parameter ai, di, i, dan i untuk setiap link.

Keterangan: ai = jarak sepanjang sumbu xi dari oi ke perpotongan xi dan zi-1 di = jarak sepanjang sumbu zi-1 dari oi-1 ke perpotongan xi dan zi-1. Parameter
di merupakan variabel dari joint prismatik
i = sudut antara zi-1 dengan zi diukur dari sumbu xi
i = sudut antara xi-1 dengan xi diukur dari sumbu zi-1. Parameter i merupakan variabel pada joint revolute
Parameter a dan menggunakan sumbu-x indeks sekarang. Sedangkan
parameter d dan menggunakan sumbu-z indeks sebelumnya.
8. Hitung matriks homogenous A tiap – tiap joint dengan mengalikan semua
matriks homogenous translasi dan rotasi melalui persamaan matriks A.
9. Tentukan matriks transformasi akhir T dengan mengalikan semua matriks
homogenous A dari tiap – tiap joint. 𝑇𝑛0 = 𝐴1. 𝐴2. 𝐴3…𝐴𝑛
Contoh penerapan konversi DH pada robot manipulator dijelaskan pada Gambar
4.3. Mula – mula struktur dari robot manipulator ditentukan terlebih dahulu gambar
sumbu koordinat lokalnya pada tiap – tiap joint. Setelah semua sumbu koordinat
tergambar, maka langkah selanjutnya adalah melengkapi tabel parameter DH seperti
pada Tabel 4.1.
Gambar 4.3 Sistem Koordinat Pada Manipulator

Tabel 4.1 Parameter DH
Setiap joint dihitung matriks homogenous A dengan mengalikan semua matriks
transformasi dari keempat variabel masing – masing joint. Keseluruhan kinematika
maju T dari lengan robot tersebut dihitung dengan mengalikan semua matriks
homogenous setiap joint.

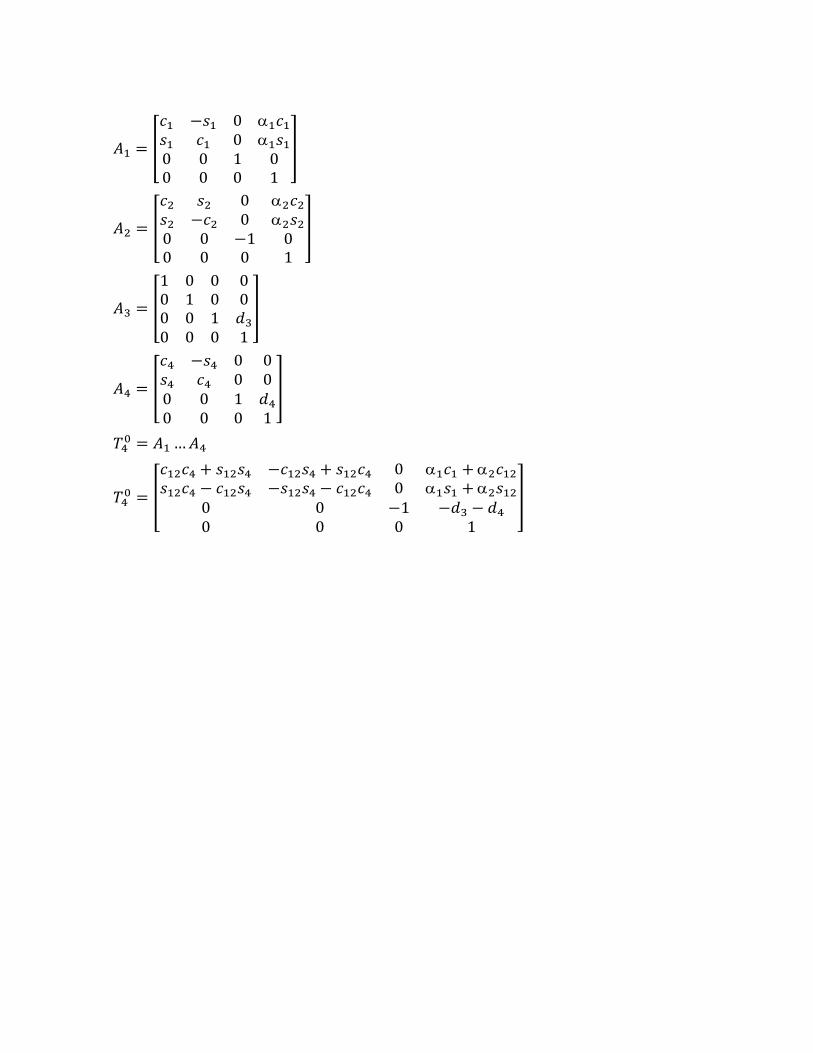
Penerapan konversi DH pada manipulator SCARA ditunjukkan pada Gambar 4.4.
Proses konversi dilakukan dengan menggambarkan sumbu koordinat lokalnya terlebih
dahulu pada tiap – tiap joint. Parameter DH masing – masing joint dituliskan pada Tabel
4.2.
Gambar 4.4 Sistem Koordinat Pada SCARA
Tabel 4.2 Parameter DH
Setiap joint dihitung matriks homogenous A dengan mengalikan semua matriks
transformasi dari keempat variabel masing – masing joint. Keseluruhan kinematika
maju T dari lengan robot tersebut dihitung dengan mengalikan semua matriks
homogenous setiap joint.
𝐴1 = [
𝑐1 −𝑠1 0 1𝑐1𝑠1 𝑐1 0 1𝑠10 0 1 00 0 0 1
]
𝐴2 = [
𝑐2 𝑠2 0 2𝑐2𝑠2 −𝑐2 0 2𝑠20 0 −1 00 0 0 1
]
𝐴3 = [
1 0 0 00 1 0 00 0 1 𝑑30 0 0 1
]
𝐴4 = [
𝑐4 −𝑠4 0 0𝑠4 𝑐4 0 00 0 1 𝑑40 0 0 1
]
𝑇40 = 𝐴1…𝐴4
𝑇40 = [
𝑐12𝑐4 + 𝑠12𝑠4 −𝑐12𝑠4 + 𝑠12𝑐4 0 1𝑐1 + 2𝑐12𝑠12𝑐4 − 𝑐12𝑠4 −𝑠12𝑠4 − 𝑐12𝑐4 0 1𝑠1 + 2𝑠12
0 0 −1 −𝑑3 − 𝑑40 0 0 1
]

BAB 5
MOBILE ROBOT KINEMATICS
5.1 Mobile Robot
Mobile robot merupakan jenis robot yang mampu berpindah tempat tanpa
dipengaruhi oleh link. Penentuan posisi pada mobile robot lebih sulit dikarenakan ruang
kerja (workspace) robot tidak ditentukan oleh struktur robot, akan tetapi ditentukan
oleh kondisi lingkungan yang akan dijelajah oleh robot tersebut. Berdasarkan jenis
penggeraknya, sebuah mobile robot dapat dibedakan menjadi 4 (empat) jenis, yaitu
Single Wheel Drive, Differential Drive, Synchro-Drive, dan Ackermann Steering.
5.1.1 Single Wheel Drive
Single Wheel Drive merupakan jenis robot yang menggunakan satu roda
sebagai pengendali arah dan penggeraknya. Jenis robot ini seperti penggerak pada
sepeda roda tiga. Pada Gambar 5.1 menjelaskan struktur robot Single Wheel Drive.
Gambar 5.1 Struktur Single Wheel Drive
5.1.2 Differential Drive
Differential Drive merupakan jenis robot yang paling sering digunakan. Robot
jenis ini memanfaatkan perbedaan arah putar dan kecepatan putar dari kedua roda
penggeraknya untuk mengubah arah orientasi robot. Bentuk sistem penggerak ini

dapat kita temui pada mesin eskavator atau tank. Pada Gambar 5.2 menunjukkan
contoh gerakan dari robot Differential Drive dalam mengubah arah.
Gambar 5.2 Pergerakan Robot Differential Drive
5.1.3 Ackermann Steering
Jenis mobile robot dengan penggerak yang paling umum digunakan pada
transportasi darat adalah Ackermann Steering. Robot jenis ini memisahkan roda
penggerak dengan roda pengarah. Dalam mengubah arah orientasi, robot ini
menggerakkan roda pengarah, sedangkan untuk mengubah arah maju dan mundur
robot jenis ini memanfaatkan putaran roda penggerak. Pada Gambar 5.3
menunjukkan struktur dasar robot Ackermann Steering.
Gambar 5.3 Struktur Robot Berjenis Ackermann Steering
5.1.4 Synchro-Drive
Synchro-Drive merupakan jenis robot yang baru – baru ini dikembangkan.
Jenis robot ini memiliki keunggulan dalam menentukan orientasi robot. Jenis robot

ini juga tidak memerlukan ruang tambahan untuk mengubah orientasinya. Pada
Gambar 5.4 merupakan struktur robot Synchro-Drive. Seluruh roda yang digunakan
robot jenis ini memiliki kemampuan untuk berputar dan merubah orientasi.
Gambar 5.4 Struktur Robot Synchro-Drive
5.2 Kinematika Pada Mobile Robot
Forward Kinematics pada mobile robot diperlukan untuk dapat memperkirakan
posisi akhir robot terhadap perubahan roda penggeraknya. Kinematika robot dapat
dihitung dengan mengasumsikan bahwa roda robot selalu menempel pada sumbu
koordinat.
5.2.1 Differential Drive
Perubahan posisi dari mobile robot dapat dihitung berdasarkan jarak tempuh
roda yang setara dengan keliling roda. Keliling roda kanan (SR) dan keliling roda kiri
(SL) dapat dihitung berdasarkan revolusi roda menggunakan persamaan berikut.
Pada Gambar 5.5 menjelaskan bagaimana pergerakan yang dihasilkan dari
perubahan kedua roda robot. Jarak tempuh robot tersebut dapat diketahui
dengan menggunakan perhitungan rata – rata dari keliling kedua roda robot
seperti pada persamaan berikut.

Gambar 5.5 Trajectory Pergerakan Differential Drive
Sudut perputaran dari mobile robot (ϕ) dapat dihitung berdasarkan jarak
robot terhadap titik putar c (center) dan lebar robot (d) dengan menggunakan
persamaan berikut.
Dengan melakukan operasi eliminasi pada kedua persamaan sebelumnya
akan menghasilkan persamaan sederhana untuk menentukan sudut putar
orientasi robot yang terdapat pada persamaan berikut.
Posisi dari yang dihasilkan oleh pergerakan robot dapat dihitung dengan
menggunakan persamaan trigonometri sederhana terhadap titik sebelumnya.

5.2.2 Ackermann Steering
Penentuan posisi dari robot Ackermann Steering dapat dihitung dengan
menggunakan persamaan trigonometri berikut.
Perubahan jarak maju dapat dihitung dengan menggunakan perubahan
jarak roda depan (s) seperti yang ditunjukkan pada Gambar 5.6.
Gambar 5.6 Ackermann Steering
Pada Gambar 5.7 menjelaskan bagaimana pergerakan yang dihasilkan dari
perubahan seluruh roda robotnya. Perpindahan posisi robot terhadap posisi
sebelumnya dapat dihitung dengan menggunakan persamaan berikut.

Gambar 5.7 Trajectory Pergerakan Ackermann Steering

BAB 6
INVERSE KINEMATICS
6.1 Inverse Kinematics Concept
Pada Forward Kinematics kita dapat menentukan pengaruh perubahan setiap
joint terhadap ujung manipulator. Kinematika balik merupakan invers dari kinematika
maju. Pembahasan pada Inverse Kinematics ialah bagaimana menentukan posisi tiap –
tiap joint agar menghasilkan posisi ujung lengan robot sesuai yang diinginkan. Inverse
Kinematics memiliki beberapa pilihan dalam menghasilkan solusi, kondisi tersebut
dapat dijelaskan pada Gambar 6.1 yakni, sudut pada tiap – tiap joint dapat diubah pada
pilihan nilai tertentu untuk menghasilkan posisi akhir ujung lengan yang sama.
Gambar 6.1 Solusi Inverse Kinematics
Inverse Kinematics Modern dapat disederhanakan dengan menggunakan teknik
Decoupling. Cara kerja dari teknik Decoupling ialah dengan memecah matriks
homogenous yang dihasilkan Forward Kinematics menjadi kinematika posisi (o) dan
kinematika orientasi (R). Notasi (q) merupakan variabel yang terdapat pada tiap – tiap
joint, dimana pada joint revolute memiliki variabel (θ) sedangkan pada joint prismatic
memiliki variabel (d).

Matriks homogenous yang memiliki dimensi 4𝑥4 apabila dijabarkan hanya akan
menghasilkan 4 (empat) persamaan matematis. Keempat persamaan matematis
tersebut hanya dapat digunakan untuk menyelesaikan 3 (tiga) variabel atau
pergerakan dari 3 joint, sehingga apabila robot manipulator yang ingin ditentukan
solusinya memiliki lebih dari 3 joint, maka perlu dipecah terlebih dahulu menjadi 2
(dua) perhitungan. Teknik ini yang digunakan pada teknik Decoupling kinematika
robot.
Pada Gambar 6.2 menjelaskan mengenai salah satu penerapan dari teknik
Decoupling. Dari Gambar 6.2 terlihat bahwa lengan robot yang ingin diselesaikan
memiliki 6 (enam) joint (joint 0-5), atau dengan kata lain akan terdapat 6 (enam)
variabel yang harus dicari nilainya. Untuk dapat menyelesaikan persamaan kinematika
dari lengan robot tersebut, salah satunya dengan cara jika joint-3, 4, dan 5 dianggap
tidak bergerak, maka dapat diasumsikan pergerakan lengan robot hanya
mempengaruhi posisi dari titik (𝑜𝑐). Hubungan titik (𝑜𝑐) dengan titik (o) yang
merupakan ujung lengan dapat dijelaskan dengan menggunakan persamaan berikut
ini.
Pada Gambar 6.2 terlihat bahwa joint-4 dan 5 tidak berubah serta jarak titik (𝑜𝑐)
terhadap titik (o) adalah sejauh (𝑑6) sepanjang sumbu-z. Matriks rotasi (R) adalah
transformasi rotasi titik (𝑜6𝑥6𝑦6𝑧6) terhadap sumbu (𝑜0𝑥0𝑦0𝑧0). Jika sudah diketahui
nilai dari variabel untuk joint-0, 1, dan 2, maka akan dapat diketahui posisi ujung
manipulator dengan persamaan berikut.

Gambar 6.2 Kinematika dengan Teknik Decoupling
Langkah – langkah teknik Decoupling adalah sebagai berikut:
1. Hitung nilai dari (𝑞1, 𝑞2, 𝑞3) yang menghasilkan posisi center pergelangan (𝑜𝑐)
menggunakan persamaan. Posisi titik (o) sudah diketahui yang merupakan
titik tujuan dari kinematika.
2. Gunakan variabel joint yang diperoleh dari langkah-1 untuk memeriksa
kebenaran (𝑅30).
3. Hitung nilai dari matriks rotasi yang menghubungkan titik (𝑜𝑐) dengan titik (o)
menggunakan persamaan berikut.

Gambar 6.3 Analisa Geometri Tiga Lengan Pertama
Ketiga joint pertama dari Gambar 6.2 digambarkan lebih rinci pada Gambar 6.3.
Solusi keseluruhan dari robot manipulator dijelaskan pada persamaan berikut.
