basic structure of coxeter groupsmath.lsa.umich.edu/~speyer/665/coursenotes.pdf · basic structure...
TRANSCRIPT
BASIC STRUCTURE OF COXETER GROUPS
These are class notes from the first month of Math 665, taught at the University ofMichigan, Fall 2017. Class taught by David E Speyer; class notes edited by David andwritten by the students: Elizabeth Collins-Wildman, Deshin Finlay, Haoyang Guo, AlanaHuszar, Gracie Ingermanson, Zhi Jiang and Robert Walker. Thanks also to the Fall 2019class, Anna Brosowsky, Shelby Cox, Will Dana, Will Newman, Ruilin Shi and Danny Stollfor their comments and suggestions. Further comments and corrections are welcome!
Contents
1. Introduction 22. Arrangements of hyperplanes 33. Classification of positive definite Cartan matrices 44. Non-orthogonal reflections 85. The geometry of two reflections 96. Coxeter Groups, Cartan matrices, roots and hyperplanes 127. The sign function and length 128. A key lemma 139. Consequences of the Key Lemma 1510. Reflections, transpositions and roots 1811. Finishing the classification of finite reflection groups 1812. Inversions, reflection sequences and length 2013. Root sequences 2114. Parabolic Subgroups 2215. Crystallographic groups 2416. Affine symmetries and affine reflection groups 2717. Overview of discrete Euclidean reflection groups 2818. Discrete Euclidean reflection groups are Coxeter groups 3019. Coxeter groups of affine Cartan matrices, basic structure 3120. Affine Coxeter groups as semidirect products 3221. Hyperbolic Coxeter groups 35
1

2 BASIC STRUCTURE OF COXETER GROUPS
1. Introduction
This course will study the combinatorics and geometry of Coxeter groups. We start bydiscussing the finite reflection groups. We are doing this for three reasons:
(1) The classification of finite reflection groups is the same as that of finite Coxetergroups, and the structure of finite reflection groups motivates the definition of aCoxeter group.
(2) One of my favorite things in math is when someone describes a natural sort of objectto study and turns out to be able to give a complete classification. Finite reflectiongroups is one of those success stories.
(3) This will allow us to preview many of the most important examples of Coxeter groups.I’ll also take the opportunity to tell you their standard names.
Today we will, without proof, describe all the finite reflection groups.Let V be a real vector space with a positive definite symmetric bilinear form · (dot prod-
uct). Let α be a nonzero vector in V . The orthogonal reflection across α⊥ is the linearmap
x 7→ x− 2α · xα · α
α.
This fixes the hyperplane α⊥ and negates the normal line Rα. An orthogonal reflectiongroup is a subgroup of GL(V ) generated by orthogonal reflections. We will be classifyingthe finite orthogonal reflection groups.
Let W1 ⊂ GL(V1) and W2 ⊂ GL(V2) be reflection groups. Then we can embed W1 ×W2
into GL(V1 ⊕ V2), sending (w1, w2) to[w1 00 w2
]. We call a reflection group irreducible if we
can not write it as a product in this way. We will now begin describing all of the irreducibleorthogonal reflection groups.
The trivial group: Take V = R and W = {1}.The group of order 2: Take V = R and W = {±1}. This group can be called A1 or B1.The dihedral group: Let m be a positive integer and consider the group of symmetries
of regular m-gon in R2. This is generated by reflections across two hyperplanes with angleπ/m between them. Calling these reflections σ and τ , we have σ2 = τ 2 = (στ)m = 1. Thisdihedral group has order 2m and can be called I2(m). We note a general rule of namingconventions – the subscript is always the dimension of V .
The symmetric group: Consider the group Sn acting on Rn by permutation matrices.The transposition (ij) is the reflection across (ei−ej)⊥. This breaks down as R(1, 1, . . . , 1)⊕(1, 1, . . . , 1)⊥ So the irreducible reflection group is Sn acting on (1, 1, . . . , 1)⊥. This is calledAn−1.
The group Sn n {±1}n: Consider the subgroup of GLn(R) consisting of matrices whichare like permutation matrices, but with a ±1 in the nonzero positions. This is a reflectiongroup, generated by the reflections over (ei − ej)
⊥, (ei + ej)⊥ and e⊥i . We give example
matrices for n = 3 below: 0 1 01 0 00 0 1
0 −1 0−1 0 00 0 1
−1 0 00 1 00 0 1
reflection across (e1 − e2)⊥ (e1 + e2)⊥ e⊥1
For reasons we will get to eventually, this is both called Bn and Cn.

BASIC STRUCTURE OF COXETER GROUPS 3
H1 H2
H3
ρ
D
β2 β1
β3
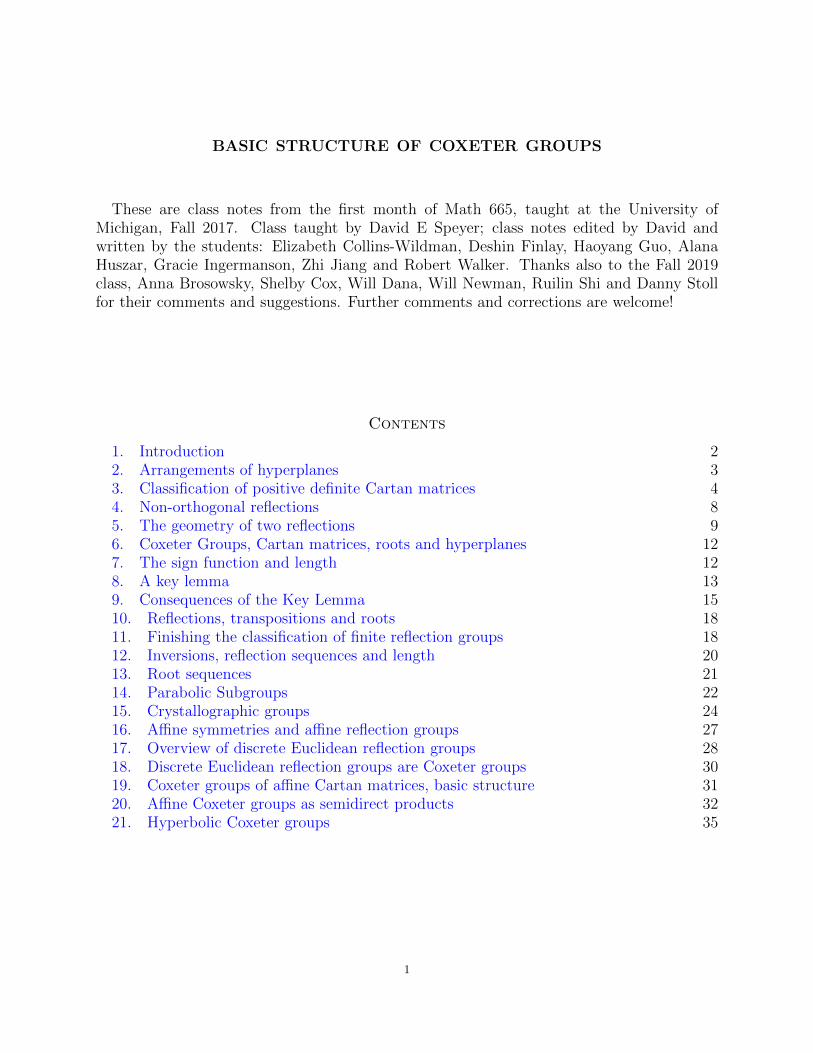
Figure 1. Our running example of a hyperplane arrangement
The group Snn{±1}n−1: Consider the subgroup of the previous group where the productof the nonzero entries in the matrix is 1. This is an index two subgroup of Bn, generated bythe reflections across (ei ± ej)⊥. It is called Dn.
Collisions of names: We have A1∼= B1, D1
∼= {1}, A1 ×D1∼= I2(1), A1 × A1
∼= D2∼=
I2(2), A2∼= I2(3), B2
∼= I2(4) and A3∼= D3. (The last is not obvious.) Some authors will
claim that some of these notations are not defined, but if you define them in the obviousways, this is what you have. Also, I2(6) has another name, G2.
We have now listed all but finitely many of the finite orthogonal reflection groups. Theremaining cases are probably best understood after we start proving the classification, butwe’ll try to say something about them. Their names are E6, E7, E8, F4, H3 and H4.
Sporadic regular solids: H3 is the symmetry group of the dodecahedron and its dualthe icosahedron. F4 is the symmetry group of a regular 4-dimensional polytope called the24-cell, H4 is the symmetry group of two regular 4-dimensional polytopes: the 120-cell andthe 600-cell. We’ll discuss this further in Section 14.
Symmetries of lattices: F4 is the group of symmetries of the lattice Z4∪[Z4 +
(12, 1
2, 1
2, 1
2
)]in R4. E8 is the group of symmetries of the eight dimensional lattice{
(a1, a2, . . . , a8) ∈ Z8 ∪[Z8 +
(12, 1
2, . . . , 1
2
)]:∑
ai ∈ 2Z}.
E7 is the subgroup of this stabilizing (1, 1, 1, 1, 1, 1, 1, 1); E6 is the subgroup of E7 stabilizing(0, 0, 0, 0, 0, 0, 1, 1). A reflection group which stabilizes a full rank lattice (it need not bethe full stabilizer of that lattice) is called crystallographic. The crystallographic finitereflection groups are types An, Bn = Cn, Dn, E6, E7, E8, F4 and G2.
2. Arrangements of hyperplanes
Let V be a finite dimensional R-vector space and let H1, H2, · · · , HN be finitely manyhyperplanes in V . Let Hi = β⊥i for some vectors βi ∈ V ∨. The Hi divide V up into finitelymany polyhedral cones.
Choose some ρ not in any Hi. Let D◦ be the open polyhedral cone it lies in and let Dbe the closure of D◦. We’ll choose our normal vectors βi such that 〈βi, ρ〉 > 0. Observe:There can be no linear relation between the β’s of the form
∑ciβi = 0 with ci ≥ 0 (except
c1 = c2 = · · · = cN = 0) since then∑ci〈βi, ρ〉 = 0.
We will call βi simple if βi is not of the form∑j 6=i
cjβj with cj ≥ 0. So
D = {σ : 〈βi, σ〉 ≥ 0, 1 ≤ i ≤ n} = {σ : 〈βi, σ〉 ≥ 0, βi simple }.

4 BASIC STRUCTURE OF COXETER GROUPS
In Figure 1, β1 and β2 are simple and β3 is not.Now let V have an inner product and let Hi be the reflecting hyperplanes of some finite
orthogonal reflection group. Let ρ, D0, D, Hi and βi be as before. Call the βi “positiveroots”. Let α1, · · · , αk be the simple roots.
Example. Consider An−1 (the symmetric group Sn) acting on Rn. The reflections are thetranspositions (ij); the hyperplanes are xi = xj with normal vectors ei − ej. If we takeρ = (1, 2, · · · , n), then the positive roots are ei − ej for (i > j).
The simple roots are ei+1−ei =: αi. All the other roots are positive combinations of these,since ej − ei = (ej − ej−1) + (ej−1− ej−2) + · · ·+ (ei+1− ei). So D = {(x1, x2, · · · , xn) : x1 ≤x2 ≤ · · · ≤ xn}.
Let’s review basic linear algebra by computing the angles between these simple roots.Since 〈α1, α3〉 = 0, the angle between α1 and α3 is 1
2π. What’s the angle between α1 and
α2? We have α1 · α1 = α2 · α2 = (1)2 + (−1)2 = 2, so |α1| = |α2| =√
2 and α1 · α2 =(e2− e1) · (e3− e2) = −1, so the angle is cos−1 −1√
2√
2= 2
3π. These are examples of the lemma
we will prove next.
Lemma. In any finite reflection group with α1, · · · , αk as before, the angle between αi andαj is of the form π(1 − 1
mij), mij ∈ {2, 3, 4, · · · }. Letting si be the reflection over α⊥i , the
integer mij is the order of sisj.
Proof. Let θ be the angle between αi and αj. Then sisj is rotation by 2θ around α⊥i ∩ α⊥j .
Letting m be order of sisj, we see θ must be of the form lmπ, where GCD(l,m) = 1. So si, sj
generate a copy of the dihedral group of order 2m. The m reflections in that subgroup arein mirrors π
mapart. So the corresponding positive roots look like this:
πm
The simple roots αi and αj must be the two at the ends, as the other roots aren’t simple.�
Corollary. For i 6= j, 〈αi, αj〉 ≤ 0.
Proof. We have cosπ(1− 1m
) ≤ 0 for m ≥ 2. �
Lemma. The simple roots α1, α2, · · · , αk are linearly independent.
Proof. Suppose∑ciαi = 0. We already know we can’t have all ci ≥ 0. We also can’t have
all ci ≤ 0.Let I = {i : ci > 0}, and define J = {j : cj < 0} analogously. Rewrite the proposed rela-
tion as∑
i∈I ciαi =∑
j∈J(−cj)αj, and call this sum γ. But then γ·γ =∑
i∈I,j∈J ci(−cj)〈αi, αj〉 ≤0. So γ = 0. But we already showed that there is no nontrivial relationship
∑ciαi = 0 with
all ci ≥ 0 or all cj ≤ 0. �
3. Classification of positive definite Cartan matrices
Let’s summarize what we achieved last time. Let V be a finite dimensional vector spacewith an inner product. Let W ⊆ GL(V ) be a finite orthogonal reflection group and H1, . . . ,Hn be the hyperplanes corresponding to the reflections in W . Choose ρ ∈ V −
⋃iHi. Let βi
be normal to Hi such that 〈βi, ρ〉 > 0 and we let α1, . . . , αk be the simple roots. Let si be

BASIC STRUCTURE OF COXETER GROUPS 5
the reflection in α⊥i . We showed that the αi are linearly independent and the angle between
αi and αj is π(
1− 1mij
), where mij is the order of sisj.
Main Idea: Today, we will forget about the reflection group and look at sets of vectorswith these properties. It turns out that this is a very limited set.
We begin by normalizing |αi| to√
2 so 〈αi, αj〉 = 2 cos[π(
1− 1mij
)]= −2 cos π
mij. We
call this Aij. We also have Aii = 〈αi, αi〉 = 2. The Aij form a symmetric matrix, which wecall A.
Example. Let W = Sn = An−1. So αi = ei − ei+1 for 1 ≤ i ≤ n− 1. We have
A =
2 −1 0 0 0 0−1 2 −1 · · · 0 0 00 −1 2 0 0 0
.... . .
...0 0 0 2 −1 00 0 0 · · · −1 2 −10 0 0 0 −1 2
.
Proposition. A is positive definite.
Proof. Let ~c ∈ Rk6=0. Then, ~c TA~c =
∑i,j cicj 〈αi, αj〉 =
⟨∑i ciαi,
∑j cjαj
⟩≥ 0. There is
equality here if and only if∑ciαi = 0, but as the αi are linearly independent and ~c 6= 0,
this doesn’t happen. Thus, ~c TA~c > 0 . �
We encode A in a graph Γ: The vertices are 1, . . . ,k and we include an edge (i, j) ifmi,j ≥ 3 (so Aij < 0) and we label those edges with mij if mij > 3. These are calledCoxeter diagrams . We’ll classify the connected Coxeter diagrams.
Before we begin, we remind the reader of a few key values:
mij Aij2 03 −1
4 −√
2 ≈ −1.41
5 −1+√
52≈ −1.62
6 −√
3 ≈ −1.73
Since positive definite matrices have all submatrices positive definite, Γ cannot contain aninduced subgraph corresponding to a non-positive definite matrix. We will thus begin to listnon-positive definite graphs. To do this, we use the following convention: If a matrix A isn’tpositive-definite, there is a nonzero vector c such that cTAc ≤ 0. We will label the vertex iwith ci in the below graphs to illustrate why each graph is not positive definite, and writethe value of cTAc to the right of these graphs.
Observe that, in each of our examples, the vector we have used has positive coordinates.This means that any submatrix whose entries are termwise dominated by those of thesegraphs is also not positive definite. In particular, these graphs are excluded not only asinduced subgraphs, but as subgraphs altogether.

6 BASIC STRUCTURE OF COXETER GROUPS
1
1 1 · · · 1 1
cTAc = 0
Since Γ cannot contain this subgraph, Γ is a tree.
1 1
2
1 1
1 1
2 2 · · · 2 2
1 1
cTAc = 0
Since Γ cannot contain these subgraphs or any graph whose edge labels dominate them, Γhas no vertices of degree ≥ 4, and at most one of degree 3.
√2
42 · · · 2
√2
4cTAc = 0
Since Γ cannot contain this subgraph or any graph whose edge labels dominate this, Γ hasat most one edge with mij ≥ 4.
1√
24
2 2 · · · 2 2
1
cTAc = 0
Since Γ cannot contain this subgraph or any graph whose edge labels dominate this, Γ doesnot have both an edge with mij ≥ 4 and a vertex of degree 3.
At this point, we know that Γ is either
(1) Three paths with a common endpoint, and all edges with mij = 3 or(2) A single path, with at most one edge having mij > 3.
The following excluded graphs rule out all but finitely many three path cases:
1
2
1 2 3 2 1
cTAc = 0
2
1 2 3 4 3 2 1
cTAc = 0
3
2 4 6 5 4 3 2 1
cTAc = 0
The following excluded graphs rule out all but finitely many single path cases.

BASIC STRUCTURE OF COXETER GROUPS 7
2 44
3√
2 2√
2√
2 cTAc = 0
1 25
2 1 cTAc = 8− 4√
5 < 0
35
4 3 2 1 cTAc = 26− 12√
5 < 0√
36
2 1 cTAc = 0
Remark. Almost all of the graphs above are positive semidefinite, meaning that we canachieve cTAc = 0 but not cTAc < 0. Moreover, their kernel is one dimensional. Thus, we are
forced to use the precise weights shown here. The exceptions are 1 25
2 1
and 35
4 3 2 1 . In these cases, the matrix has signature + + +− and+ + + + −, and the weights given were chosen by rounding the eigenvector of negativeeigenvalue to the nearest integer vector and checking that the resulting c worked.
Although I say that there is no choice as to what weights I use in the positive semidefinitecase, that is a little misleading. I chose to normalize |α| =
√2 which means, in the vocabulary
of the next section, that α = α∨. If I allow myself the more general setting where α and α∨
are proportional but not equal, I gain the freedom to choose their ratio, and I could use thatfreedom to remove the square roots from the figures above.
The surviving graphs are the (connected) Coxeter diagrams! We list them in Table 1.There are some collisions of names. Some books have fixed conventions about which one
of these names to use in each case, but I see no reason not to have two names for the sameobject.
Bn = Cn A2 = I2(3) B2 = I2(4) G2 = I2(6) A3 = D3.
Reversing the Process: We have now shown that every reflection group generates oneof these Coxeter diagrams, but in order to conclude that this is a classification, we need toshow that this process can be reversed and is a bijection. It is clear that we can go from thegraph Γ to the matrix A. Then, we have the following:
Theorem. For any positive definite symmetric matrix A, there exist vectors α1, α2, ..., αnthat are linearly independent such that 〈αi, αj〉 = Aij.
Proof. Write A = UTDU with U orthogonal, D diagonal. Then, D = diag(λ1, ..., λn).Let X = diag(
√λ1, ...,
√λn)U . Then, A = XTX and the columns of X have the desired
property. �
We can thus go from A to some α1, . . . , αk, with corresponding reflections si(x) = x −2 〈αi,x〉〈αi,αj〉αi. These then generate some group Woutput.
However: The following issues still remain
(1) Is Woutput necessarily finite?(2) If we start with a group Winput, run the first algorithm to get a graph Γ and then run
it backwards to get Woutput, does Woutput = Winput? As a special case, if Γ = Γ1 tΓ2,then Woutput(Γ) is clearly the product of Woutput(Γ1) and Woutput(Γ2), but it isn’tclear that the input group decomposes as a product. So addressing this issue willjustify our choice to focus on connected graphs.
(3) If we change ρ, do we always get the same Coxeter diagram Γ?(4) If we start with αi, . . . , αk, build Woutput and take a ρ with 〈ρ, αi〉 > 0, will αi, . . . ,
αk be the simples we get?

8 BASIC STRUCTURE OF COXETER GROUPS
• • • · · · • •An
• 4 • • · · · • •Bn
• • • · · · • •• Dn
• • • • •• E6
• • • • • •• E7
• • • • • • •• E8
• • 4 • •F4
• 5 • •H3
• 5 • • •H4
• m • I2(m)
Table 1. The finite Coxeter groups
We will show in Section 11 that the answer to all these questions is yes. However, before weanswer these questions, we will build up the vocabulary to study infinite Coxeter groups, sothat we can prove more general theorems which address these questions in the finite case.
4. Non-orthogonal reflections
Let V be a finite dimensional real vector space and let V ∨ be its dual. We call an elementσ ∈ GL(V ) is a reflection if σ2 = Id and V σ is of codimension one. Then reflections looklike σ(x) = x− 〈α∨, x〉α for some α ∈ V , α∨ ∈ V ∨ with 〈α∨, α〉 = 2. Note that this formulanegates Rα and fixes (α∨)⊥.
The vectors α and α∨ are determined by σ up to rescaling of the form
α 7→ cα, α∨ 7→ c−1α∨.
If V is equipped with a nondegenerate symmetric bilinear form, giving an identificationV ∼= V ∨, then σ is orthogonal if and only if α and α∨ are proportional. In that case, we willhave α∨ = 2α
〈α,α〉 .
A reflection group is defined as a subgroup of GL(V ) generated by reflections.
Lemma. If G is a finite subgroup of GL(V ), then G preserves a positive definite symmetricbilinear form.

BASIC STRUCTURE OF COXETER GROUPS 9
Proof. Take any positive-definite bilinear form ( , ). Set
〈~v, ~w〉 :=1
G
∑g∈G
(g~v, g ~w).
Then 〈 , 〉 is positive definite and G-invariant. �
So all finite reflection groups are orthogonal; we will only get interesting new examples inthe infinite case.
Remark. Allowing α and α∨ to be distinct can simplify formulas even in the positive definitecase. In the conventions of the last section, the roots of Bn are ±ei ± ej and ±
√2ek. If we
instead take the roots to be {±ei±ej,±ek} and the co-roots to be {±ei±ej,±2ek}, then wecan compute in Bn without any square roots of 2. Indeed, well chosen scalings can removethe square roots in all the crystallographic cases: A, B, C, D, E, F and G.
This explains why we have the double name Bn = Cn; we could have chosen the roots tobe {±ei± ej,±2ek} and the co-roots to be {±ei± ej,±ek} instead. The former choice is Bn
and the latter is Cn.Cartan originally chose these names when classifying simple Lie algebras, and in that
context we get specific roots and coroots, with Aij always integral. The Lie algebras Bn
and Cn are honestly different, but they have the same associated reflection group. Thisexplains why G2 gets a special name: It showed up in Cartan’s classification, whereas I2(m)for m 6∈ {2, 3, 4, 6} did not, because for those other values of m we cannot make Aij integral.This is also why H and I are at the end of the list; they were added later.
5. The geometry of two reflections
Let σ and τ be two reflections with
σ(x) = x− 〈α∨, x〉α, τ(x) = x− 〈β∨, x〉β,and 〈α∨, α〉 = 〈β∨, β〉 = 2. Let K be the cone {x ∈ V ∨ : 〈α, x〉, 〈β, x〉 > 0}.
The key fact that we will need is the following:
Theorem. Suppose that 〈β∨, α〉, 〈α∨, β〉 ≤ 0 and 〈α∨, β〉〈β∨, α〉 is either of the form4 cos2 π
m, or else is ≥ 4. If α and β are not proportional, then the images of K under
the subgroup generated by σ and τ are disjoint.
If α and β are proportional, then they must point in opposite directions, since 〈α∨, α〉 and〈α∨, β〉 have different signs. So, in this case, K is empty.
The case where 〈α∨, β〉〈β∨, α〉 = 4 is a bit annoying, so postpone that one until the end.
The vectors (α∨, β∨) and (α, β) pair by[
2 〈α∨,β〉〈β∨,α〉 2
], which is nonsingular since we assume
〈α∨, β〉〈β∨, α〉 6= 4. So V decomposes as Span(α, β) ⊕ Span(α∨, β∨)⊥. The action on thesecond summand is trivial, so we consider the action on Span(α, β). In the (α, β)-basis, wehave
σ =
[−1 −〈α∨, β〉0 1
]τ =
[1 0
−〈β∨, α〉 −1
]and
στ =
[−1 + 〈α∨, β〉〈β∨, α〉 〈α∨, β〉
−〈β∨, α〉 −1
]We thus see that στ has determinant 1 and trace 〈α∨, β〉〈β∨, α, 〉 − 2.

10 BASIC STRUCTURE OF COXETER GROUPS
Case 0: If 〈α∨, β〉 = 〈β∨, α〉 = 0, then σ and τ act on α and β by [ 1 00 −1 ] and [ −1 0
0 1 ]respectively, so σ and τ commutate and generate a copy of the I2(2) = A1 × A1 hyperplanearrangement.
Case I: Suppose that 0 < 〈α∨, β〉〈β∨, α〉 < 4; put 〈α∨, β〉〈β∨, α〉 = 4 cos2 θ for someθ ∈ (0, π/2). So Tr(στ) = 4 cos2 θ− 2 = 2 cos(2θ). We see that the characteristic polynomialof στ is (λ− ei2θ)(λ− e−i2θ). Since ei2θ 6= e−i2θ, we know that στ is conjugate to a rotationby 2θ.
If θ = `πm
with GCD(`,m) = 1, then σ and τ generate a dihedral group of order 2m; if θ/π isirrational, then σ and τ generate an infinite group. In particular, if 〈α∨, β〉〈β∨, α〉 = 4 cos2 π
m,
then στ is a rotation by 2π/m, the wedge K has central angle π/m and the group 〈σ, τ〉permutes 2m copies of this wedge.
For future reference note that, if m is even, then the orbits of α and β under 〈σ, τ〉 eachhave m elements, and the vectors in the α orbit are not proportional to those in the β orbit.If m is odd, the orbits of each of α and β have 2m vectors, and the vectors in the β orbit
are proportional to the vectors in the α orbit. The ratio of proportionality is√〈α∨,β〉〈β∨,α〉 .
Case II: Suppose that 4 < 〈α∨, β〉〈β∨, α〉. Put 〈α∨, β〉〈β∨, α〉 = 4 cosh2 φ. (Recall that
the hyperbolic cosine is coshφ = eφ+e−φ
2.) So Tr(στ) = 2 cosh(2φ). So the eigenvalues
of στ are e±2φ, and thus στ has infinite order. More specifically, the eigenspaces of στdivide Span(α, β) into 4-cones. The 〈σ, τ〉 orbit of K covers one of these cones, dividingit into infinitely many non-overlapping wedges. The reader who has studied relativity willrecognize [ cosh τ sinh τ
sinh τ cosh τ ] as the matrix of a Poincare transformation; the analogue of a rotationin one space and one time dimension.
Case III: We finally turn back to the case where 〈α∨, β〉〈β∨, α, 〉 = 4.If α and β are linearly independent, then στ acts on the α, β basis by a matrix of the
form[
3 2x−2x−1 −1
], hence of Jordan form [ 1 1
0 1 ]. The translates of K form adjacent cones, fillingup a half space. �
We close with some pictures. The actions of σ and τ are depicted by the red andblue arrows, and the reflecting hyperplanes are shown in black. In Figure 2, we have〈α∨, β〉〈β∨, α, 〉 = 2 = 4 cos2 π
4. In Figure 3, we have 〈α∨, β〉〈β∨, α, 〉 = 9.
Figure 2. The reflecting hyperplanes for the dihedral group I2(4)
We draw several figures in the affine case, when 〈α∨, β〉〈β∨, α, 〉 = 4. First, suppose thatα and β are not proportional, but α∨ and β∨ are. In this case, the action in V looks like theleft hand side of Figure 4 and the action in V ∨ looks like the right hand side.

BASIC STRUCTURE OF COXETER GROUPS 11
Figure 3. The reflecting hyperplanes for a hyperbolic infinite dihedral group
If neither α, β nor α∨, β∨ are proportional, then dimV must be at least 3. The action of〈σ, τ〉 preserves planes parallel to Span(α, β). Figure 5 depicts the action on such an affineplane.
Figure 4. An affine infinite dihedral group, acting on V and V ∨
Figure 5. An affine slice through a three dimensional representation of theinfinite dihedral group

12 BASIC STRUCTURE OF COXETER GROUPS
6. Coxeter Groups, Cartan matrices, roots and hyperplanes
The combinatorial data to give a Coxeter group is a collection of integers mij for 1 ≤ i, j ≤n, with mii = 1 and mij = mji ≥ 2. The Coxeter group W is the group with generators sifor 1 ≤ i ≤ n and relations (sisj)
mij = 1. In particular, each si has order 2.A Cartan matrix A, for our Coxeter group W , is an n× n matrix satisfying
Aii = 2,
Aij = 0 if mij = 2,
AijAji = 4 cos2 πmij
, Aij, Aji < 0 if 3 ≤mij <∞, and
AijAji ≥ 4, Aij, Aji < 0 if mij =∞.
If V and V ∨ are dual vector spaces with α1, α2, . . . , αk ∈ V and α∨1 , α∨2 , . . . , α
∨k ∈ V ∨, we
say that the pair by A if 〈α∨i , αj〉 = Aij. In this case, we get actions of W on both V andV ∨ with si(x) = x− 〈α∨i , x〉αi, and si(x
∨) = x∨ − 〈x∨, αi〉α∨i . The αi and α∨i are called thesimple roots and simple coroots.
Let D = {x∨ ∈ V ∨|〈x∨, αi〉 ≥ 0}, and D◦ = {x∨ ∈ V ∨|〈x∨, αi〉 > 0}. We will almostalways impose that D◦ is non-empty.
The set of roots is defined by Φ = W · {α1, α2, . . . , αk} ⊂ V .We write T for the set of elements of W of the form wsiw
−1. (Think T for “transposition”.)Each t in T acts on V by a reflection; if t = wsiw
−1 then t acts by x 7→ x− 〈β∨t , x〉βt whereβt = wαi and β∨t = wα∨i . Later, we will see that every element of W which acts by areflection on V is in T .
Remark. We have set up our vocabulary in such a general manner that β and cβ couldboth be roots, for some c > 1. Also, for this reason, the notations βt and β∨t shouldonly be considered up to scalar. In most practical cases, this issue doesn’t come up. Theprecise criterion is the following: Suppose that, whenever mij is a finite odd integer, we haveAij = Aji. Then, if β1 and β2 are proportional roots, we must have β1 = ±β2. We’ll beready to prove this in Section 13.
In the mean time, note that if our goal is to study Coxeter groups rather than root systems,we can just choose to take Aij = Aji and be safe. If we further assume that the αi are abasis of V , there is an easy proof: Define an inner product on V by αi · αj = Aij. Since weassumed Aij = Aji, this is a symmetric bilinear form. It is easy to check that W preserves ·.Since αi · αi = 2, we have β · β = 2 for any β ∈ Φ, and thus, if β1 and β2 are proportional,then β1 = ±β2.
7. The sign function and length
Let W be a Coxeter group, and continue to use the notations from the previous section.
Lemma. There is a homomorphism sgn : W −→ ±1 given by:
si 7−→ −1.
Proof. Recall W = 〈si|(si, sj)mij = 1〉. All relations are sent to 1 if we send si to −1. �
Proof (alternate). Choose a Cartan matrix, roots, and coroots. This gives us:

BASIC STRUCTURE OF COXETER GROUPS 13
W GL(V )
{±1} R∗ �
sgn det
For w ∈ W , define `(w) to be the minimal ` ∈ Z≥0 such that we can write w = si1si2 . . . si`for some sequence of simple reflections. Notice `(w) = 0 if and only if w = Id. Note alsothat sgn(w) = (−1)`(w).
We define a word (si1 , si2 , . . . , si`) to be reduced if ` = `(si1si2 · · · si`). A (consecutive)subword of a reduced word is reduced, i.e. if s1s2 · · · s` is reduced, sisi+1 · · · si+j is reduced.
Lemma. For w ∈ W and any simple generator si, `(siw) = `(w)± 1 and `(wsi) = `(w)± 1.
Proof. We have `(siw) ≤ `(w) + 1 and `(w) ≤ `(siw) + 1. So, `(siw) − `(w) ∈ {−1, 0, 1}.We also have
(−1)`(w) = sgn(w) = − sgn(siw) = −(−1)`(siw),
so `(w) ≡ `(siw) + 1 mod 2. �
We will say si is a left ascent/descent of w according to whether:
`(siw) = `(w) + 1 (left ascent), or
`(siw) = `(w)− 1 (left descent).
We also define
`(wsi) = `(w) + 1 (right ascent), and
`(wsi) = `(w)− 1 (right descent).
Any w other than the identity has some left descent and some right descent.As an exercise, in Sn we have
`(w) = #{(i, j)|1 ≤ i < j ≤ n,w(i) > w(j)}.The pairs (i, j) in this formula are called the inversions of w. So si is a left ascent ifw−1(i) < w−1(i+ 1), and is a right ascent if w(i) < w(i+ 1).
Example. Let 231 be 2 7→ 1, 3 7→ 2, 1 7→ 3. Then,
• s2 is a right descent of 231, because positions 2 and 3 are out of order, and• s2 is a left ascent of 231, because numbers 2 and 3 are in order.
If you find writing 231 to denote 2 7→ 1, 3 7→ 2, 1 7→ 3 confusing, you have my sympathies.It is, however, reasonably standard and has the advantage of working nicely with labelingthe hyperplane arrangement. Specifically, {x1 ≤ x2 ≤ x3}, {x1 ≤ x3 ≤ x2}, {x2 ≤ x3 ≤ x1}are consecutive regions of the hyperplane arrangement, given by D, s2D and s2s1D. Wewould like to abbreviate {x2 ≤ x3 ≤ x1} to 231, so we want s2s1 to be 231. But s2(s1(1)) =s2(2) = 3, s2(s1(2)) = s2(1) = 1 and s2(s1(3)) = s2(3) = 2, so s2s1 is 1 7→ 3, 2 7→ 1, 3 7→ 2.
8. A key lemma
Let W be a Coxeter group and A a Cartan matrix for W . Let αi in V and α∨i in V ∨ withα∨i , αj〉 = Aij. We set D = {x∨ ∈ V ∨|〈x∨, αi〉 ≥ 0} and D0 = {x∨ ∈ V ∨|〈x∨, αi〉 > 0}.
We assume D0 6= ∅.

14 BASIC STRUCTURE OF COXETER GROUPS
Remark. Many sources assume that the αi are linearly independent; we don’t need that.However, we note that αi and αj are not proportional: We can’t have αi ∈ R>0αj as〈α∨i , αi〉 = 2 and 〈α∨i , αj〉 ≤ 0, and we can’t have αi ∈ R<0αj as that would make D0 = ∅.
Today’s goal is the following key lemma:
Lemma. For w ∈ W and si a simple reflection:
• If si is a left ascent of w, then 〈 , αi〉 ≥ 0 on wD and• If si is a left descent of w, then 〈 , αi〉 ≤ 0 on wD .
We depict the Lemma in Figure 6: We have 〈 , α1〉 ≥ 0 on the right hand half of the figureand 〈 , α1〉 ≤ 0 on the left.
Example. Let’s see what this means for the symmetric group Sn. Recall that (σx)i = xσ−1(i)
where σ ∈ Sn and x ∈ Rn. So
x ∈ σD ⇐⇒ σ−1x ∈ D ⇐⇒ (σ−1x)i is increasing ⇐⇒ xσ(1) ≤ xσ(2) ≤ ... ≤ xσ(n).
The lemma says that (i i+ 1) is a left ascent of σ ⇐⇒ 〈ei+1 − ei, x〉 ≥ 0 for x ∈ σD. Bythe above equivalences, this will happen if and only if σ−1(i) ≤ σ−1(i+ 1).
Figure 6. We have 〈 , α1〉 ≥ 0 on the right side of the figure and ≤ 0 on the left.
Proof. We proceed by induction on `(w).Base case: `(w) = 0 so w = 1. We want to show 〈 , αi〉 ≥ 0 on D. This is true by the
definition of D.Case I: si is a left descent of w so `(siw) = `(w)−1. Inductively, 〈x, αi〉 ≥ 0 for x ∈ siwD,
so 〈siy, αi〉 ≥ 0 for y ∈ wD. But 〈siy, αi〉 = 〈y, siαi〉 = −〈y, αi〉 so 〈y, αi〉 ≤ 0 for y ∈ wD.Case II: si is a left ascent of w, but `(w) > 0. This is the key case. Since w 6= 1, there
is some left descent sj of w. Choose a reduced word for w of the form uv where u is in thesubgroup generated by si and sj and u is as long as possible. Then u and v are reduced and`(u) + `(v) = `(w).
Since we chose u maximal, v doesn’t have reduced words with first letter si or sj. So siand sj are both left ascents of v. And `(v) = `(w)−`(u) < `(w). So, inductively, 〈 , αi〉 ≥ 0and 〈 , αj〉 ≥ 0 on vD. Geometrically, vD is somewhere in the dark gray cone of Figure 7.

BASIC STRUCTURE OF COXETER GROUPS 15
We know u doesn’t start with si since si is a left ascent for w, so u = sjsisjsi...si or j Weclaim that 1 ≤ `(u) ≤ mij − 1. If `(u) = 0 then sj is not a descent of w, contradiction.No element of 〈si, sj〉 has length greater than mij. Finally, is if `(u) = mij then u could berewritten as sisj... with mij terms, which contradicts si being a left ascent of w. So the claimis proven. Geometrically, we have shown that uD is one of the blue triangles in Figure 7.
Figure 7. The proof of the Key Lemma
By our computations in Section 5, and the result of the previous paragraph regarding u, weknow that u maps the region {x : 〈αi, x〉, 〈αj, x〉 ≥ 0} into the half space {x : 〈αi, x〉 ≥ 0}.(This half space is shaded in Figure 7.) So uvD = wD lies in {x : 〈αi, x〉 ≥ 0}, as desired. �
Corollary. If w ∈ W is not 1 then wD0 ∩D0 = ∅.Proof. Let si be a left descent of w. We have 〈αi, 〉 < 0 on wD0 and 〈αi, 〉 > 0 on D0. �
Corollary. W → GL(V ∨) is injective. W → GL(V ) is also injective.
Remark. Remember that W is defined abstractly by generators and relations. Even in typeAn−1, it is not obvious that these relations are enough to quotient down to the group Sn,but we have shown this must be true, because Sn is clearly the image of W in GLn(R).
9. Consequences of the Key Lemma
We continue to impose that D◦ 6= ∅.Last time, we proved the Key Lemma:
Lemma. We have 〈 , αi〉 ≥ 0 on wD if si is a left ascent of w and we have 〈 , αi〉 ≤ 0 onwD if si is a left descent of w.
Corollary. For any w ∈ W other than the identity, we have wD◦ ∩D◦ = ∅.Proof. Let si be a descent of w. Then α⊥i separates D◦ and wD◦. �
Corollary. For u, v ∈ W , with u 6= v, we have uD◦ ∩ vD◦ = ∅.Proof. We have uD◦ ∩ vD◦ = u(D◦ ∩ u−1vD◦). �
So all wDo are disjoint.

16 BASIC STRUCTURE OF COXETER GROUPS
Corollary. The maps W → GL(V ) and W → GL(V ∨) are injective.
We define Φ to be Φ = W · {α1, α2, ..., αn} ⊂ V .
Corollary. For any β ∈ Φ and w ∈ W , the cone wD lies entirely to one side of β⊥.
Proof. Let β = uαi. We can reduce to αi and u−1wD and use the Key Lemma. �
Corollary. Each wD◦ is a connected component of V \ ∪β∈Φβ⊥.
Proof. Its enough to show the claim for D◦. We know D◦ lies entirely to one side of eachβ⊥, and it is connected, so D◦ lies in some connected component E of V \∪β∈Φβ
⊥. Supposefor contradiction, there is some x ∈ E \D◦. Since x ∈ E, for each αi, we have 〈x, αi〉 6= 0.Moreover, since x 6∈ D◦, for some αj, we have 〈x, αi〉 < 0. Then α⊥j separates x from D◦. �
We now know that, for any β ∈ Φ and w ∈ W , the cone wD is entirely to one side ofβ⊥. In particular, for any β ∈ Φ, we have either 〈 , β〉 ≥ 0 or 〈 , β〉 ≤ 0 on D. Sowe can write Φ = Φ+ ∪ Φ−, where Φ+ = {β ∈ Φ〈D◦, β〉 > 0} are the positive roots, andΦ− = {β ∈ Φ|〈D◦, β〉 < 0} are the negative roots. We earlier described positive and negativeroots using a particular ρ ∈ D◦; we now see that the choice of ρ is irrelevant.
We now describe how to see positive and negative roots in V rather than in terms of theirpairing with the dual space V ∨. See Figure 8 for a graphical depiction.
Figure 8. D lying on the positive side of β⊥ is dual to β being in the positivespan of the αi
Lemma. If β ∈ Φ+, then β can be written as∑ciαi with ci ≥ 0.
Proof. Suppose not. Let R = {∑ciαi, ci ≥ 0}, so R is a closed convex set in V and β 6∈ R.
By the Farkas lemma, there is some γ ∈ V ∨, with 〈γ, 〉 ≥ 0 on R, and 〈γ, 〉 < 0 on β.But then γ ∈ D, and 〈γ, β〉 < 0, so β is not in Φ+ after all. �
Lemma. Choose an index i. There exists an θ ∈ D, such that 〈θ, αi〉 = 0 and 〈θ, αj〉 > 0for i 6= j.
Proof. Consider the line segment joining ρ ∈ D◦ and −α∨i . At ρ, all 〈 , αj〉 > 0, and at−α∨i , we have 〈 , αi〉 = −2 and 〈 , αj〉 ≥ 0 for i 6= j. At the point of this segment where〈 , αi〉 = 0 we must have 〈 , αj〉 > 0 for all i 6= j. �
Corollary. αi /∈ SpanR+{αj : j 6= i}
Proof. Let αi =∑
j 6=i cjαj, pair with θ in the previous lemma. �
Corollary. There is a nonempty open set of α⊥i contained in D ∩ siD

BASIC STRUCTURE OF COXETER GROUPS 17
Proof. Let U be a small enough neighborhood of θ in α⊥i . Then all other 〈 , αj〉 > 0 on Uand 〈 , αi〉 = 0 on U , so U ⊂ D ∩ α⊥i . But siD ∩ α⊥i = si(D ∩ α⊥i ) = D ∩ α⊥i since si fixesα⊥i . �
Figure 9. D and siD border along a codimension 1 wall
This shows that D and siD border along a codimension 1 wall, as shown in Figure 9.Thus, for any v, the cones vD and vsiD border along a codimension 1 wall. This raises thefollowing application, which will return next class. Consider a word si1si2 · · · si` with productw. Set vk = si1si2 · · · sik . Then vk−1D and vkD = vk−1sikD border along a codimension onewall. So the sequence of cones D = v0D, v1D, v2D, . . . , v`D = wD each border alongcodimension one walls, as in Figure 10.
Figure 10. A word in W gives a walk through the chambers wD
The region⋃w∈W wD is called the Tits cone and denoted Tits(W ). The above argument
shows that it is connected in codimension one. We can reverse the description of the previousparagraph, using the following lemma:
Proposition. For any β ∈ Φ, β not a multiple of αi, the cones D and siD are on the sameside of β⊥.
Proof. If D and siD are on opposite sides of β⊥, then 〈β, 〉 = 0 on D∩ siD. Then Span(D∩siD) = α⊥i so 〈β, 〉 can be 0 on it only if β ∈ Rαi. �
So the chambers bordering D are precisely the chambers siD. So the chambers borderinguD are usiD. Thus, if we have a sequence of adjacent chambers D, v1D, v2D, . . . , v`D, wemust have vk = vk−1sik for some sequence si1 , . . . , si` .
We point out a useful corollary for later:
Proposition. For any β ∈ Φ+, β not a multiple of αi, the root siβ is in Φ+.
Proof. Since β is positive, we have 〈β, 〉 > 0 on D. So we also have 〈β, 〉 > 0 on siD, andthus 〈siβ, 〉 > 0 on D. �

18 BASIC STRUCTURE OF COXETER GROUPS
10. Reflections, transpositions and roots
We continue to assume D◦ 6= ∅.We can now clear up a few details. We defined T = {usiu−1 : u∈W, i= 1, · · · , n}, and
we defined an element t of GL(V ) to be a reflection if t2 = 1 and t fixes a linear space ofcodimension 1. It is clear that the elements of T are reflections, but it is not clear that everyreflection is in T . Indeed, until we knew that W → GL(V ) was injective, we had no hopeof proving this since, if g is in the kernel of this map and t ∈ T , then gt is also a reflection.Now we can address this issue.
Proposition. Let t ∈ W act on V ∨ by a reflection. Then t ∈ T .
Proof. Let H be the fixed plane of t. Choose a word si1si2 · · · si` for t, and define vk =si1si2 · · · sik as before. Then D, v1D, v2D, . . . , v`D = tD is a walk through the Tits cone.Since D and tD are on opposite sides of Fix(t), this walk must cross it somewhere. Thereare two cases:
Case 1: The hyperplaneH passes through the interior of some vkD. But then tvkD◦∩vkD◦
is nonempty, contradicting that the wD◦ are disjoint.Case 2: For some index k, the hyperplane H separates vk−1D and vkD. Then tvk−1D
◦ ∩vkD
◦ is nonempty, so tvk−1 = vk. We deduce that t = vk−1sikv−1k−1. �
We often describe a reflection by pointing to the hyperplane it fixes. The next Propositionjustifies this:
Proposition. If t1 and t2 ∈ T reflect over the same hyperplane, then t1 = t2.
Proof. Let t1 = u1s1u−11 and t2 = u2s2u
−12 . Consider t2 · u1D. Points of u1D
0 very near the(u1α1)⊥ wall would be mapped by t2 into t1u1D
0. Since the interiors of the chambers aredisjoint, t2u1 = t1u1 and hence t2 = t1. �
Remark. This need not be true when D = ∅, see the left hand side of Figure 4.
If t = usiu−1, then t(x) = x− 〈β∨, x〉β, where β = uαi and β∨ = uα∨i .
We have now shown that we have bijections between T , reflections and reflecting hyper-planes. Reflecting hyperplanes correspond to Φ modulo scaling, so these things all correspondto Φ modulo scaling. Unfortunately, we still don’t have quite enough tools to address thescaling issue that we discussed in Section 6.
11. Finishing the classification of finite reflection groups
In Section 3, we classified positive definite Cartan matrices. Prior to doing that, wediscussed one procedure which starts with a finite orthogonal reflection group and producesa positive definite Cartan matrix, and another which starts with a positive definite Cartanmatrix and produces an orthogonal reflection group. We did not show that these procedureswere inverse, so we don’t know that our classification of Cartan matrices corresponds to aclassification of finite reflection groups. (We did note that every finite reflection group isorthogonal, see Section 4.)
Algorithm 1: Start with W a finite orthogonal reflection group. Take
Φ = {normals to hyperplanes}.Choose ρ not in any β⊥; this splits Φ = Φ+ tΦ−. Let α1, . . . , αk be simple roots in Φ+ withreflections s1, . . . , sk. The αi will be linearly independent, and the angle between αi and αj

BASIC STRUCTURE OF COXETER GROUPS 19
is π(1 − 1/mij) where mij is the order of sisj. We get a positive-definite Cartan matrix Awith entries Aij = αi · αj.
Algorithm 2: Start with positive-definite Cartan matrix with entriesAij. Find α1, . . . , αk ∈V and α∨1 , . . . , α
∨k ∈ V ∨ such that 〈α∨i , αj〉 = Aij. Note that the αj’s will be linearly inde-
pendent: indeed, if∑
i ciαi = 0, then 〈∑
i ciα∨i ,∑
j cjαj〉 = 0. However, the latter value can
be expressed as 〈Σ,Σ〉 = cTAc and A is positive definite, yielding a contradiction.We can define an inner product on V (so V ∼= V ∨) and can think of V = V ∨. The si,
given by si(x) = x− 〈α∨i , x〉αi, generate some subgroup W ⊆ GL(V ).Claim 1: The output of Algorithm 2 is finite when A is positive definite.
Proof of Claim 1. Let Σ be the unit sphere in V and let ∆ = Σ ∩ D. We equip Σ with aRiemmannian metric by restricting the inner product from V , so we can talk about volumesof subsets of V . All of the w∆ have disjoint interiors in Σ. So
Vol(Σ) ≥∑w∈W
Vol(w∆) = |W |Vol(∆)
where the equality is because W preserves the inner product on V and hence preserves themetric on Σ. Thus
|W | ≤ Vol(Σ)
Vol(∆). �
Remark. In Section 12, we will show that, if W is finite, then V =⋃wD. So, in fact,
Σ =⋃w∆ and |W | = Vol(Σ)
Vol(∆)in this case.
We now know that it makes sense to compose the algorithms in either order. We firstconsider the composition
WinAlg 17−→ A
Alg 27−→ Wout.
That is, Win is sent to A by Algorithm 1, and A in turn is sent to Wout by Algorithm 2.Claim 2: Win is isomorphic to Wout.
Proof of Claim 2. By definition, Wout is generated by sout1 , . . . , soutk obeying (souti soutj )mij = 1.
Meanwhile, the elements sin1 , . . . , sink in Win obey (sini sinj )mij = 1. So we have a group
homomorphism Wout → Win ⊆ GL(V ).We showed Wout → GL(V ) is injective, so Wout ⊆ Win. The group Win is generated by
reflections, so it is enough to check every reflection t in Win is in the image of Wout. Supposethat H = Fix(t) and that H = β⊥ for some β ∈ Φin. If H = β⊥ for some β ∈ Φout, then tis the orthogonal reflection over β⊥ and t ∈ Wout. If not, H passes through wD◦ for somew ∈ Wout. Up to replacing t by w−1tw, we may assume H passes through D◦. Then
β 6∈ SpanR+(α1, . . . , αk) ∪ − SpanR+(α1, . . . , αk).
But that means we failed to take the correct simples in Algorithm 1, a contradiction. �
Now we compose in the opposite order. Suppose we start with a positive-definite Cartanmatrix Ain and we construct
AinAlg 27−→ W
Alg 17−→ Aout.
Under Algorithm 2 we consider the following data: αin1 , . . . , αink ∈ V and a positive-definite
inner product on V with 〈sini 〉 = W . Under Algorithm 1 we consider the following data:Φ = Φ+ ∪ Φ−, where αout1 , . . . , αoutk ∈ Φ+ are the simples of Φ+. We want to verify that:

20 BASIC STRUCTURE OF COXETER GROUPS
• 〈αouti , αoutj 〉 = 〈αini , αinj 〉.• If ρ is such that 〈ρ, αini 〉 > 0, then {αini } = {αoutj }.
First of all, what if we choose ρ such that 〈αini , ρ〉 > 0?Thus Φ+, as defined by 〈ρ, ·〉, will be positive combinations of the αinj ’s; the latter will be
the simple roots.What about some other ρ? That ρ must lie in wD◦ for some w ∈ W , so w−1ρ ∈ D◦. The
positive roots for ρ are w · {positive roots for D◦} = {w · αin1 , . . . , w · αink }.
12. Inversions, reflection sequences and length
Last time, we defined T = {usiu−1|i = 1, . . . , n, u ∈ W}, the set of conjugates of simplegenerators. We saw the bijection:
T ←→ {β⊥ : β ∈ Φ}t 7−→ Fix(t)wsiw
−1 ←− [ (wαi)⊥.
Given a word si1si2 · · · si` , we defined a sequence vk = si1si2 · · · sik and tk = si1si2 · · · sik · · · si2si1 .The chambers D = v0D, v1D, . . . , v`D form a walk through the Tits cone, and vk−1D andvkD are separated by the hyperplane Fix(tk). We call t1, t2, . . . , t` the reflection sequenceof the word si1si2 · · · si` .
Suppose we have two words for w. By the definition of W as generators and relations, wecan turn one word into the other by
• Inserting or deleting s2i and
• Replacing sisjsi · · · s(ior j) by sjsi · · · s(j or i), where these two blocks are of length mij.
This latter operation is called a braid move for mij ≥ 3, and a commutation move formij = 2. These two operations effect the reflection sequence as follows:
• Inserting s2i in positions k and k + 1 inserts two copies of the same reflection in
positions (k, k + 1).• Performing a braid or commutation move in positions (k + 1, k + 2, . . . , k + mij)
reverses the reflection sequence in those positions.
We thus see that, for any reflection t, the parity of the number of times t occurs in thereflection sequence is independent of the choice of reduced word. For w ∈ W , we define t tobe an inversion of w if t occurs an odd number of times in reflection sequences of wordsfor w, and write inv(w) for the set of inversions of w. Geometrically, we see that
inv(w) = {t ∈ T : Fix(t) separates D and wD}.It is clear that | inv(w)| ≡ `(w) mod 2 and | inv(w)| ≤ `(w). We will soon show somethingbetter:
Proposition. For any w ∈ W , we have | inv(w)| = `(w).
Corollary. A word for w is reduced if and only if no reflection occurs twice in the reflectionsequence.
Before we prove this, it is worth making a more general definition: for x ∈ V ∨−⋃β∈Φ β
⊥,set
I(x) = {t ∈ T : Fix(t) separates D and x}.So I(x) = inv(w) for x ∈ wD◦.

BASIC STRUCTURE OF COXETER GROUPS 21
Proposition. For x as above and si a simple reflection, we have I(six) = siI(x)4{si},where 4 is symmetric difference.
Proof. It is clear that x and six are on opposite sides of α⊥i , so si ∈ I(x) if and only ifsi 6∈ I(six). For any reflection t other than si, let β be a corresponding positive root. Thensiβ is also a positive root. We have 〈β, x〉 > 0 if and only if 〈siβ, six〉 > 0. �
We now show that | inv(w)| = `(w), as claimed above, and something more.
Proposition. Let x ∈ V ∨ −⋃β∈Φ β
⊥ and suppose that I(x) is finite. Then x ∈ wD for
some w with `(w) = |I(x)|.
Proof. Our proof is by induction on |I(x)|. If |I(x)| = ∅, then 〈αi, x〉 > 0 for every simpleroot αi, so x ∈ D and we take w = e.
Now, suppose that I(x)| 6= ∅ so x 6∈ D. Then some 〈αi, x〉 < 0 and si ∈ I(x). Then|I(six)| = |I(x)|−1 so, by induction, we have six ∈ w′D for some w′ with `(w′) = |I(x)|−1.Then x ∈ siw′D. Moreover, since 〈αi, x〉 > 0 on w′D, we know that si is a left-ascent of w′,so `(siw
′) = `(w′) + 1. Taking w = siw′, we are done. �
We have now established that the number of inversions of w is the length of w. There arealso some other useful corollaries of this result:
Corollary. Let x ∈ V ∨ −⋃β∈Φ β
⊥. Then x ∈ Tits if and only if I(x) is finite.
Corollary. Let x ∈ V ∨. Then x ∈ Tits if and only if {t ∈ T : 〈βt, x〉 < 0} is finite.
From this we can deduce:
Corollary. We have Tits = V ∨ if and only if W is finite, if and only if −D ⊆ Tits.
If W is finite, then there must be some w0 with w0D = −D. We have inv(w0) = T , so w0
is the longest element of W . The element w0 is called the long word or the longest wordof W .
13. Root sequences
Last time, given a word si1si2 · · · si` , we defined a sequence vk = si1si2 · · · sik and tk =si1si2 · · · sik · · · si2si1 . Put βk = si1si2 · · · sk−1αik . So β⊥k is the fixed space of tk. We call β1,. . . , β` the root sequence .
When we walk from tk−1D to tkD, we cross from the side where 〈βk, 〉 is positive to whereit is negative. This has the following easy consequences:
Proposition. Fix a reflecting hyperplane H. Then vectors normal to H occur in the reflec-tion sequence with alternately positive and negative sign, starting with positive.
Corollary. The word si1si2 · · · sik is reduced if and only if all the βk are positive.
This is a practical condition to use to test whether a word is reduced.Finally, we have the tools to address the annoying issue of proportional positive roots. As
we noted way back in Section 5, if mij is odd and Aij 6= Aji, then (sisj)(m−1)/2αi =
√AjiAijαj.
We therefore make the hypothesis that, if mij is odd, then Aij = Aji .
With this hypothesis in place, we analyze the effect of changing the word si1 · · · sik on thereflection sequence.

22 BASIC STRUCTURE OF COXETER GROUPS
Proposition. Inserting s2i in positions k and k+1 inserts a β and a −β in position (k, k+1).
Proof. Put u = si1 · · · sik−1. We are considering the roots uαi and usiαi. Clearly, usiαi =
u(−αi) = −uαi. �
Proposition. With the hypothesis that, if mij is odd, then Aij = Aji, performing a braidor commutation move on si and sj in positions (k + 1, k + 2, . . . , k + mij) reverses the rootsequence in those positions.
Proof. Put u = si1 · · · sik . We want to consider, on the one hand, (uαi, usiαj, usisjαi, · · · )and, on the other hand, (uαj, usjαi, usjsiαj, · · · ). We observed in Section 5 that the se-quences (αi, siαj, sisjαi, · · · ) and (αj, sjαi, sjsiαj, · · · ) are reversals of each other, and actingon everything by u doesn’t change that. �
Corollary. Consider any root β ∈ Φ. The elements in the reflection sequence of the form±β appear alternately, starting with the positive root. If β occurs an odd number of timesin the reflection sequence for one word, then it also occurs an odd number of times in thereflection sequence for any other word.
We are finally ready to address the nuisance issue. The importance of this result is muchsmaller than the amount of time it has taken up; it just keeps coming up when we want tostate things carefully:
Theorem. Suppose that if mij is odd, then Aij = Aji, and that D◦ 6= ∅. Let uαi and vαjbe proportional roots. Then uαi = ±vαj.
Proof. Since uαi and vαj are proportional, usiu−1 and vsjv
−1 are reflections over the samehyperplane and thus usiu
−1 = vsjv−1. We rearrange this equation as (v−1u)si = sj(v
−1u),and put w = v−1u.
We first make some preliminary clean up: The hypotheses and desired conclusion areunchanged by replacing u by usi and/or replacing v by vsj. These have the effect of replacingw by wsi, sjw or sjwsi. We may therefore assume that si is a right ascent, and sj a leftascent, of w. (This reduction is the place where the ± comes from. Once we have made thisreduction, we can show the sign is +.)
Choose a reduced word sk1 · · · skr for w. By our reduction in the previous paragraph,the words sk1 · · · skrsi and sjsk1 · · · skr are reduced as well. So there is only one root inthe reflection sequence of sjsk1 · · · skr which is proportional to αj, namely the αj in thefirst position. But then αj must occur in the reflection sequence of sk1 · · · skrsi and, sincethat word is reduced as well, it must occur in the last position. We deduce that αj =sk1 · · · skrαi = wαi. So αj = wαi = v−1uαi, and we have vαi = uαj as desired. �
14. Parabolic Subgroups
Let I be a subset of the vertices of the Dynkin diagram. The standard parabolicsubgroup WI is the subgroup of W generated by si for i ∈ I.
We choose a Cartan matrix A, roots and coroots αi and α∨i as usual, such that D◦ isnonempty. Let AI be the submatrix of A with rows and columns indexed by I. Then {αi}i∈Iand {α∨i }i∈I pair by AI . Setting D◦I = {x ∈ V ∨ : 〈x, αi〉 > 0 i ∈ I}, we have D◦I ⊇ D◦ andin particular is nonempty. Thus, all of our results apply to {αi}i∈I and {α∨i }i∈I , and we getto deduce that the group WI is the Coxeter group for the generators {si}i∈I , with relationscoming from mij with i, j ∈ I.

BASIC STRUCTURE OF COXETER GROUPS 23
Put L = {x ∈ V ∨ : 〈x, αi〉 = 0 i ∈ I}. So we have built a hyperplane arrangementfor WI in V ∨ where all the hyperplanes contain the linear space L. The Tits cone for WI
contains the Tits cone of W , so every cone wD◦ for w ∈ W is contained in wID◦I for a
unique wI ∈ WI . We can characterize wI alternately by saying that the inversions of wI areinv(w) ∩WI .
If we write w as wIIw, then we have with `(w) = `(wI) + `(Iw). We note that we have
wI = e, and equivalently w is of the form I ( ), if and only if si is a left ascent of w for i ∈ I.We have previously seen that W has trivial stabilizer on the points in D◦. We are now
ready to describe what happens on the boundary. Let x ∈ D and let I be the set of indicesi for which 〈x, αi〉 = 0.
Theorem. With the above notation, the stabilizer of x is WI . More strongly, wx ∈ D, ifand only if w ∈ WI .
Proof. Clearly, WI stabilizes x and also, clearly, if w stabilizes x, then wx ∈ D. Thus, thenontrivial fact is that, if wx ∈ D, then w ∈ WI .
So, let wx ∈ D or, equivalently, x ∈ w−1D. We abbreviate (w−1)I as u−1 and I(w−1) asv−1, so w = vu. Since u ∈ WI , we have wx = vx. We may thus replace w by v. Havingmade this replacement, our goal will be to show that v = e.
If v 6= e, then it has a right descent sj, and so sj is a left descent of v−1. Since v−1 is ofthe form I ( ), we know that si is a left ascent of v−1 for all i ∈ I, so we must have j 6∈ I.
Since sj is a left descent of v−1, by the key lemma, 〈αj, y〉 ≤ 0 for y ∈ v−1D, and inparticular 〈αj, x〉 ≤ 0. But also x ∈ D, so 〈αj, x〉 ≥ 0. We conclude that 〈αj, x〉 = 0, andthus j is in I after all, a contradiction. �
Corollary. For each y in the Tits cone, there is precisely one point in the orbit of y thatlies in D.
If w−1y ∈ D, then use w−1y to define I as above.
Corollary. With the above notation, the stabilizer of y is wWIw−1.
It is interesting to consider the classification of regular polytopes, also known as platonicsolids, from this perspective. A regular polytope is a polytope in Rn whose symmetrygroup acts transitively on chains (vertex, edge, two face, . . . , facet). They correspond to theways to put edges on the path of length n to make a finite Coxeter diagram. Specifically, thesymmetry group of a regular polytope is always a finite reflection group. The centers of thek-dimensional faces have stabilizers conjugate to W{1,2,...,k,k+2,...,n}. In Table 2, the verticesof the path are numbered from left to right. There are three infinite families in this table:The simplex is the convex hull of the standard basis vectors ej in Rn; the hypercube is theconvex hull of the 2n vectors ±e1 ± e2 · · · ± en, and the cross polytope is the convex hull ofthe 2n vectors ±ei.
Remark. Be warned that, while “simplex” and“hypertetrahedon” are synonyms, “hyper-simplex” means something else. The hypersimplex is the convex hull of the
(nk
)vectors given
as the Sn orbit of e1 + e2 + · · · + ek ∈ Rn. This has symmetry group Sn (or Sn × {±1}when k = n/2), but is not a regular polytope except in the cases k = 1, k = n − 1 and(k, n) = (2, 4).

24 BASIC STRUCTURE OF COXETER GROUPS
An • • · · · • • simplex (also known as hypertetrahedron)
Bn • 4 • · · · • • hypercube
Bn • • · · · • •4cross polytope (also known as hyperoctahedron)
F4 • • 4 • • 24-cell
H3 • 5 • • dodecahedron
H3 • • •5icosahedron
H4 • 5 • • • 120-cell
H4 • • • •5600-cell
I2(m) • m • regular m-gon
Table 2. The regular polytopes and their symmetry groups
15. Crystallographic groups
We have built our Coxeter groups to act on a vector space V . We now discuss when Wfixes some lattice in V . We start by recalling the basic linear algebra of lattices.
Definition. Let V be a finite dimensional vector space. Then, Λ ⊆ V is called a lattice ifit is a discrete additive subgroup of V which spans V as a vector space.
Theorem. Let Λ be a lattice in V . Then we can choose a basis of V as a real vector spacewhich is also a basis of Λ as a free Z-module.
Proof sketch: By induction on n; the base case n = 0 is vacuously true.Now, suppose that n > 0. Choose a nonzero vector wn ∈ Λ such that 1
kwn 6∈ Λ for integers
k > 1. We can always do this by discreteness. Then Λ/Zwn injects in V/Rwn, call the imageΛ. Then Λ is again a lattice (details left to the reader), so choose a basis w1, . . . , wn−1 of Λas required. Lift wj to wj ∈ Λ. Then w1, . . . , wn−1, wn has the required properties (detailsleft to reader). �
If Λ1 ⊂ Λ2 are two lattices, then the lattices between Λ1 and Λ2 are in bijection with thesubgroups of Λ2/Λ1.
Definition. For a lattice Λ in V , the dual lattice Λ∨ ⊆ V ∨ is
Λ∨ := {x ∈ V ∨ : 〈x, β〉 ∈ Z for all β ∈ Λ} .
Note that Λ1 ⊆ Λ2 if and only if Λ∨1 ⊇ Λ∨2 .
Definition. For W acting on V , we say that W preserves Λ iff w(Λ) = Λ for all w ∈ W .
Note that if W preserves Λ then W also preserves Λ∨ (acting via the dual action).We will show that, roughly, if W is a Coxeter group, W preserves some lattice in V iff
Aij ∈ Z. More specifically, we have the following two main theorems:
Theorem. If all Aij ∈ Z and Z 〈αi〉 and Z⟨α∨j⟩
are lattices, then W preserves them and
preserves any lattice Λ between Z 〈αi〉 and Z⟨α∨j⟩∨
.

BASIC STRUCTURE OF COXETER GROUPS 25
Proof. Recall si(αj) = αj −Aijαi so if all Aij ∈ Z, then si acts on Zαj by an integer matrix
and W preserves Zαj. Likewise W preserves(Zα∨j
)∨.
To show W preserves any Λ between these, it is enough to show that W acts trivially on(Zα∨i )∨ /Zαi. Let v ∈ (Zα∨i )∨. Then, si(v) = v − 〈α∨i , v〉αi ≡ v mod Zαi. �
Theorem. If W preserves a lattice in V , then we can choose positive real scalars ci so that,after replacing the αi by ciαi and the α∨i by c−1
i α∨i , we have Z 〈αi〉 ⊆ Λ ⊆ (Z 〈α∨i 〉)∨ and
Z 〈α∨i 〉 ⊆ Λ∨ ⊆ (Z 〈αi〉)∨. With this rescaling, the Aij are integers.
Proof. Let W preserve Λ. Then, we claim that Rαi∩Λ 6= (0). To see this, note that Λ spansV , so it contains λ 6∈ (α∨i )⊥. Then, si(λ) = λ + cαi for some c 6= 0, so cαi ∈ Λ. Thus, theclaim holds.
Since the lattice is discrete, Rαi ∩Λ = Z · (cαi) for some c ∈ R 6=0. Rescale so c = 1. Now,Z 〈αi〉i=1,...,n ⊆ Λ. Then, si(αj) = αj − Aijαi ∈ Λ, so Aijαi ∈ Λ and Aij ∈ Z.
Finally, for any λ ∈ Λ, si(λ) = λ − 〈α∨i , λ〉αi ∈ Λ so 〈α∨i , λ〉αi ∈ Λ, which means that〈α∨i , λ〉 ∈ Z. Thus, we have shown that Λ ⊆ (Z〈α∨〉)∨. �
We use the following terminology, inspired by ideas from Lie groups: Z〈α〉 is the rootlattice and Z〈α∨〉∨ is the weight lattice . The corresponding lattices in V ∨ are the corootlattice and the coweight lattice .
Suppose A is a crystallographic Cartan matrix with αi a basis for V . Let ω∨i be the dualbasis to αi (in other words, 〈ω∨i , αj〉 = δij). From the equations 〈α∨i , αj〉 = Aij, we deducethat α∨i =
∑Aijω
∨j . So the transition matrix from the ω∨j to the α∨i is given by Aij. The ω∨i
are a basis for ZZ 〈α∨〉∨ and the α∨j are a basis for Z〈α∨j 〉. So Z〈α∨〉∨/Z〈α〉∨ is isomorphic tothe cokernel of A. Here are the values of the cokernel for the finite connected crystallographicgroups.
An Bn Cn Dn, n even Dn, n odd E6 E7 E8 F4 G2
Z〈αi〉∨/Z〈α∨i 〉 Zn+1 Z2 Z2 Z2 × Z2 Z4 Z3 Z2 1 1 1
We conclude by discussing examples. We begin with the rank two examples. In Figures 11,12 and 13, the origin is at the center. The black circles are the roots, and thus the generatorsof the root lattice Z〈α〉. The lines are where pairing with some α∨i gives an integer and theopen circles are the weight lattice Z〈α∨〉∨.
Observe that the index of the root lattice in the weight lattice is 3, 2 and 1 in types A2,B2 and G2 respectively, in accord with the above table.
We return to the issue of whyBn and Cn have different names. They correspond to differentchoices of crystallographic Cartan matrix, which give different root systems. Recall that
Bn = Cn has Coxeter diagram4 · · · . Thus, we have A12A21 =
2, we have Ai,i+1Ai+1,i = 1 for i > 1 and Aij = 0 for |i− j| > 1. If we also impose thatthe Aij are integers then we must have Ai,i+1 = Ai+1,i = −1 for i > 1, and we either haveA12 = −2, A21 = −1 or vice versa. The former case is Bn and the latter is Cn.
We can realize Bn in coordinates as Φ = {±ek,±ei ± ej} and Φ∨ = {±2ek,±ei ± ej}.In Cn, the roles of Φ and Φ∨ are reversed. For Bn, we have Z〈αi〉 = Zn, while Z〈α∨〉∨ =Zn + Z(1
2, 1
2, . . . , 1
2). For Cn, we have Z〈α〉 = {(a1, . . . , an) ∈ Zn :
∑ai ≡ 0(mod 2)}, while
Z〈α∨〉∨ = Zn.

26 BASIC STRUCTURE OF COXETER GROUPS
Figure 11. The A2 roots and weight lattice
Figure 12. The B2 = C2 roots and weight lattice
Figure 13. The G2 roots and weight lattice

BASIC STRUCTURE OF COXETER GROUPS 27
16. Affine symmetries and affine reflection groups
Let V0 be a real vector space. Let V1 be a principal homogenous space (also called affinespace) for V0, meaning that V0 acts freely and transitively on V1. Concretely, if we choosea base point z in V1, then ~v 7→ z + ~v identifies V0 with V1. The affine symmetry groupAGL(V1) of V1 can be identified with GL(V0)nV0. We note that the maps V0 → AGL(V1) andAGL(V1)→ GL(V0) are completely natural, whereas the choice of right splitting AGL(V1)←GL(V0) corresponds to choosing a base point in V1 to be fixed by the image of GL(V0).
If V0 has an inner product, then the Euclidean symmetry group Euc(V1) is the sub-group O(V0)nV0 of AGL(V1). Classical Euclidean geometry studies properties of R2 and R3
which are preserved by the Euclidean symmetry group.From this perspective, reflection over an affine hyperplane is an element of GL(V0) n V0
of the form (σ,~v) where σ is a reflection and σ(~v) = −~v. 1 This reflection is orthogonal ifσ is orthogonal.
There is a standard trick to embed all these ideas into ordinary linear algebra in one moredimension. Let V = V0⊕R. Then GL(V0)n V0 embeds in GL(V ) as (g,~v) 7→
[g ~v0 1
]. We can
think of V1 as the set of pairs (x, 1) ∈ V0 ⊕ R.Taking account of the inner product is slightly trickier. Let’s assume that ·0 is a non-
degenerate symmetric bilinear form on V0, so we can (and will) identify V0 and V ∨0 . LetV = V0⊕R with degenerate bilinear form (~x, a) · (~y, b) = ~x ·0 ~y. The full symmetry group of
this bilinear form is[O(V0) 0V ∨0 R6=0
]. The corresponding dual action on V ∨ is
[O(V0) V0
0 R6=0
]. The
Euclidean symmetry group thus embeds in GL(V ∨) as[O(V0) V0
0 R6=0
]. If we put δ = (~0, 1) ∈ V ,
then we can identify V1 with the affine hyperplane {x : 〈δ, x〉 = 1} in V ∨.This trick is reversible. Let V be a real vector space equipped with a symmetric bilinear
form · that has 1-dimensional kernel Rδ. Put V0 = V/Rδ. Then · descends to a nondegeneratesymmetric bilinear form ·0 on V0. Put V1 = {x : 〈δ, x〉 = 1} in V ∨. Then V1 is a principalhomogenous space for V0. The group of symmetries of V preserving · and δ is the Euclideansymmetry group of V1.
Suppose that G0 ⊂ GL(V0) is a reflection group preserving a lattice Λ, and consider thegroup G = G0 nΛ inside the affine symmetry group. Let R ⊆ Λ be the lattice generated bythose ~v ∈ Λ which are (−1)-eigenvectors of some reflection in G0. Clearly, R is G0-invariant.
We claim that the subgroup of GL(V0) n V0 generated by affine reflections (σ, v) withσ ∈ G0 and ~v ∈ Λ is precisely G0 nR. Indeed,
(σ1, v1)(σ2, v2) · · · (σk, vk) =
(σ1σ2 · · ·σk,
k∑j=1
σ1σ2 · · ·σj−1vj
)which is plainly in G0nR. Conversely, pairs (σ, 0) generate G0 (since G0 is a reflection group)and (σ, v)(σ, 0) = (e, v) for any reflection σ and (−1)-eigenvector ~v of σ. Combining these,we see that the group generated by the (σ, v) contains G0 and contains R, so it containsG0 nR.
Thus, in particular, if W0 is a crystallographic Coxeter group, then W0 nZ〈α〉 and W0 nZ〈α∨〉 are reflection groups. The reflecting hyperplanes of W0 n Z〈α〉 are of the form {x ∈V0 : 〈β∨, x〉 = k} for β∨ ∈ Φ∨ and k ∈ Z.
1If we don’t have σ(~v) = −~v, then (σ, v) is a “glide reflection”, and has infinite order.

28 BASIC STRUCTURE OF COXETER GROUPS
17. Overview of discrete Euclidean reflection groups
Earlier, we classified finite orthogonal reflection groups. Classifying finite Euclidean reflec-tion groups doesn’t bring any new examples: If we have only finitely reflecting hyperplanes,then the hyperplane arrangement has finitely many vertices, and the group must preservethe center of mass of these vertices. So all finite Euclidean reflection groups fix a point andare thus just finite groups.
Rather, the natural thing to look at in the Euclidean case is discrete reflection groups .Let G ⊂ Euc(V1) be a group generated by reflections. Consider the corresponding hyperplanearrangement
⋃Fix(t). We’ll say that G is discrete if any bounded region of V1 only meets
finitely many reflecting hyperplanes Fix(t).Before we state our main results, some notation. An n × n Cartan matrix A is called
crystallographic if all Aij are integers. The Coxeter diagram of A is the graph Γ withvertices 1, 2, . . . , n and an edge (i, j) if Aij 6= 0. Finally, we make the following standardabuse of notation: Suppose that Aij is a Coxeter matrix. We will say that A is positive(semi)-definite if there are positive scalars di such that diAij = djAji and the symmetricmatrix [ diAij ] is positive (semi)-definite.
We now state our main results:
Theorem. All the discrete Euclidean reflection groups are Coxeter groups. More specifically,they correspond to positive semi-definite Cartan matrices module the equivalence relation[ Aij ] ∼
[ cicjAij].
Since the discrete Euclidean reflection groups are Coxeter groups, they are products ofthe Coxeter groups coming from the connected components of the Coxeter diagram Γ. So itis enough to understand the connected positive semi-definite Cartan matrices.
Theorem. Let A be a connected positive semi-definite Cartan matrix. Then A has signatureeither + + + · · ·+ or + + + · · ·+ 0.
In the first case, we get a finite Coxeter group, which we have already classified. Wedefine a Cartan matrix to be affine if it is connected and positive semi-definite. We definea Coxeter group to be affine if it comes from an affine Cartan matrix. The affine groupsalso have a beautiful classification:
Theorem. The affine Coxeter groups are in bijection with the connected crystallographicpositive definite Cartan matrices, not modulo the relation [ Aij ] ∼
[ cicjAij]. More specifically,
if W is the affine group and (W,Φ,Φ∨) is the corresponding finite crystallographic group,root system and co-root system, then W ∼= WnZ〈α∨i 〉. The subgroup W of W is a parabolicsubgroup on one fewer generator than W .
More concretely, let V ∨0 be the reflection representation of W ; then W is the subgroup ofEuc(V ∨0 ) generated by orthogonal reflections over the hyperplanes {x ∈ V ∨0 : 〈x, β〉 = k} forβ ∈ Φ and k ∈ Z. The subgroup W is generated by the reflections in {x ∈ V ∨0 : 〈x, β〉 = 0}.
Stated dually, we can take the root systems in V0⊕R to be given by {(β, k) : β ∈ Φ, k ∈ Z}and {(β∨, 0) : β∨ ∈ Φ∨}, where V0 ⊕ R has degenerate bilinear form as described in theprevious section.
Example. Consider An−1 acting on Rn in the standard way. Then An−1 acts by reflectionsover hyperplanes of the form {xi − xj = k}. Concretely, this is
(x1, x2, . . . , xi, . . . , xj, . . . , xn) 7→ (x1, x2, . . . , xj + k, . . . , xi − k, . . . , xn).

BASIC STRUCTURE OF COXETER GROUPS 29
The simple reflections are the si, which generate a copy of the finite group Sn, and theadditional reflection
s0(x1, x2, . . . , xn−1, xn) = (xn − 1, x2, . . . , xn−1, x1 + 1).
There is a natural way to think of An−1 as permutations of the integers: Let V1 be theaffine space of bi-infinite sequences xi obeying xi+n = xi + 1. Each (x1, . . . , xn) extendsuniquely to such a bi-infinite sequence, and the si can be thought of as the permutations· · · (i− n, i+ 1− n)(i, i+ 1)(i+ n, i+ 1 + n)(i+ 2n, i+ 1 + 2n) · · · of Z.
Example. The group Cn acts on Rn by reflections over the hyperplanes xi±xj = k and 2xi =k, for 1 ≤ i < j ≤ n and k ∈ Z. Simple hyperplanes can be taken to be the simple hyper-planes for Cn, namely 0 ≤ x1 ≤ x2 ≤ · · · ≤ xn, together with the additional inequality xn ≤1/2. This can also be thought of as the group of permutations of infinite sequences: Considerbi-infinite sequences xi obeying xi+2n = xi + 1 and x1−j = −xj. So every (x1, x2, . . . , xn)extends uniquely to such a sequence (. . . ,−xn, . . . ,−x2,−x1, x1, x2, . . . , xn, 1 − xn, . . . , 1 −x2, 1− x1, 1 + x1, 1 + x2, . . . , 1 + xn, . . .). The inequalities 0 ≤ x1 ≤ x2 ≤ · · · ≤ xn ≤ 1/2 areequivalent to the condition that this infinite subsequence is increasing.
We note that Bn and Cn are genuinely different groups for n ≥ 3. The group Bn is thesubgroup of Cn where we only reflect over hyperplanes of the form xi ± xj = k and xi = k.
We list the connected positive definite crystallographic Cartan matrices in Table 3. Each ofthese Cartan matrices has one dimensional kernel, and we label the vertices with a generatorof that kernel (up to some issues discussed below) as numbers on the vertices. In eachdiagram, one vertex is boxed; the parabolic subgroup generated by the unboxed simplegenerators is the finite group W .
Some comments on notation: The affine group W has one more simple generator thanthe finite group W . This can be confusing when looking at notation like An−1 and E8 – theserefer to groups with n and 9 simple generators respectively. Personally, David Speyer wouldfind it more natural to write W for the affine group and something like W0 for the finitegroup, but he has yielded to the standard conventions in these notes. Also, David Speyerwould have defined products of affine groups to be affine but, for whatever reason, that isn’tstandard.
A final technical point: this is a classification of affine Coxeter groups, not a classificationof affine Cartan matrices. Different positive semidefinite crystallographic Cartan matricescan be equivalent under Aij 7→ ci
cjAij and hence give the same affine group. For example,[
2 −2−2 2
]and
[2 −4−1 2
]both give rise to A1, which is the infinite dihedral group, and they give
isomorphic reflection representations. We note that this changes the kernel vector δ from [ 11 ]
to [ 21 ]; we have made one particular choice of δ in each diagram above, specifically, the one
where the roots and co-roots are[βk
]and
[β∨
0
].
The matrices[
2 −2−2 2
]and
[2 −4−1 2
]give non-isomorphic root systems and, for those in-
terested in applications to cluster algebras, to quiver representations or to Kac-Moody Liealgebras/groups/quantum groups, it is important to distinguish them. If you need to referto positive semidefinite crystallographic Cartan matrices, there are standard notations forthem which you can find in Kac’s Chapter Four of book Infinite Dimensional Lie Alge-bras (Cambridge University Press, 1990). Macdonald’s “Affine root systems and Dedekind’sη-function” (Inventiones, 1972) also classifies positive semidefinite crystallographic Cartan

30 BASIC STRUCTURE OF COXETER GROUPS
1∞
1 A1
1
1 1 · · · 1 1
An, n ≥ 2
24
1 1 · · · 1 1
1
Bn
14
2 2 · · · 2 14
Cn
1 1 1 · · · 1 1
1 1
Dn
1 1 1 1 1
1
1
E6
1 1 1 1 1 1 1
1
E7
1 1 1 1 1 1 1 1
1
E8
2 24
1 1 1 F4
36
1 1 G2
Table 3. The affine Coxeter groups
matrices and uses what Professor Speyer considers much better notation, but his notationsadly hasn’t caught on.
18. Discrete Euclidean reflection groups are Coxeter groups
Let V0 be a vector space with a positive definite inner product and V1 a principal ho-mogenous space for it. Let G be a discrete reflection subgroup of Euc(V1). Let D1 be aconnected component of V1 \
⋃Fix(t). Choose an identification of V1 with V0 and let the

BASIC STRUCTURE OF COXETER GROUPS 31
defining inequalities of D1 be {x ∈ V0 : βi · x ≥ ki} for some βi ∈ V0 and some ki ∈ R. LetHi be the hyperplane {x ∈ V0 : βi · x = ki}. Let si be the reflection over Hi and let mij bethe order of sisj. Put β∨i = 2
βi·βiβi.
We want to show that G is a Coxeter group with respect to these generators si and ordersmij. We note that G is a reflection subgroup of V0 ⊕ R where si corresponds to the root[βi−ki
]and coroot [ β∨i 0 ]. These roots and coroots pair by the matrix [ β∨i 0 ]
[βj−kj
]= β∨i · βj.
Setting Aij = β∨i · βj, we must show that Aij is a Cartan matrix for mij.Case I: The order mij is finite. Then the hyperplanes Hi and Hj are not parallel; let
them meet with angle θij, measured on the side that contains the polytope D. The angle θijmust be of the form `
mijπ with GCD(`,mij) = 1, since sisj has order mij. If ` is not 1, then
the subgroup generated by si and sj contains a hyperplane that passes through the wedgebetween Hi and Hj bounding D, a contradiction. So the angle is π
mij. We deduce that Aij,
Aji ≤ 0, and 0 if and only if mij = 2, and that AijAji = 4 cos2 πmij
.
Case II: The order mij is infinite. Then the hyperplanes Hi and Hj are parallel, andthus the normal vectors βi and βj are parallel. Since the half spaces {x ∈ V0 : βi · x ≥ ki}and {x ∈ V0 : βj · x ≥ kj} intersect, the vectors βi and βj must point in opposite directions,so Aij and Aji are negative. Since βi, βj, β
∨i and β∨j all lie on the same line, we must have
AijAji = 4, as desired.
Since the[βi−ki
]and [ β∨i 0 ] pair by a Cartan matrix for mij, we know that the group they
generate is the abstract Coxeter group 〈si | (sisj)mij〉.
19. Coxeter groups of affine Cartan matrices, basic structure
We will get a fair bit of milage out of the following lemma:
Lemma. LetA be a positive semi-definite connected n×n Cartan matrix and let (c1, c2, . . . , cn)be a nonzero vector in the kernel of A. Then all the ci have (strictly) the same sign.
Define the matrix Bij = diAij, so B is symmetric. We note that B = DA where D isthe diagonal matrix with entries di, so Ker(A) = Ker(B). Note that, since B is positivesemi-definite, we have B~c = 0 if and only if ~cTB~c = 0.
Proof. Let I+, I0 and I− be the sets of indices where ci is > 0, = 0 and < 0 respectively.Put ~c+ =
∑i∈I+ ciei and ~c− = −
∑i∈I− ciei, so ~c = ~c+ − ~c−.
Expanding ~cTB~c = 0, we get
~cT+B~c+ + ~cT−B~c− = 2~cT+B~c−.
Since B is positive semidefinite, the left hand side is ≥ 0. But the right hand side is2∑
i∈I+, j∈I− cicjBij, and every term of this sum is ≤ 0. Comparing the two, we deduce thatB~c+ = B~c− = 0.
What we want to show is that one of I+ and I− is all of {1, 2, . . . , n} and the otheris ∅. Without loss of generality, suppose that I+ is nonempty and suppose for the sake ofcontradiction that I+ 6= {1, 2, . . . , n}. Since Γ is connected, there is some i ∈ I+ that bordersj 6∈ I+. But then the j-th component of B~c+ is < 0, a contradiction. �
Corollary. Let A be a positive semi-definite connected n × n Cartan matrix. Then thesignature of B is either + + + · · ·+ or + + + · · · 0.

32 BASIC STRUCTURE OF COXETER GROUPS
If the signature is + + + · · ·+ then A is positive definite and corresponds to a finitegroup, which we already understand. We therefore assume A has signature + + + · · · 0. Let(c1, . . . , cn) be in the kernel of A with all ci > 0.
Let W be the Coxeter group corresponding to A. Consider a linear reflection representationV of W corresponding to A with the αi a basis (hence D◦ 6= ∅). Define a symmetric bilinearform on V by αi ·αj = diAij, so this form is positive semidefinite with signature + + + · · · 0.The reflection representation preserves this form.
Put δ =∑ciαi. Since the αi are independent, this is not 0. We have 〈α∨i , δ〉 = 0 for
all i, so all reflections si fix δ. So W preserves a symmetric positive semidefinite form withsignature +++ · · · 0 and a null vector δ, and we can think of it as a subgroup of a Euclideansymmetry group, Euc(V1) where V1 = {x ∈ V ∨ : 〈x, δ〉 = 1}.
We claim that this subgroup is discrete and, in fact, describe its fundamental domain. Weknow that a fundamental domain for W acting on V ∨ is D = {x ∈ V ∨ : 〈x, αi〉 ≥ 0}. So afundamental domain for the action on V1 is
D ∩ V1 = {x ∈ V ∨ : 〈x, αi〉 ≥ 0, 〈x, δ〉 = 1}.
Since the αi are a basis of V , the inner products with them form coordinates on V ∨, andthis is identified with the simplex {(y1, . . . , yn) : yi ≥ 0,
∑ciyi = 1}. We are using that the
ci are positive to see that this is a simplex.Finally, we check that the images of D1 fill V1. If not, then there must be some point
on the boundary of⋃w∈W wD1 where infintely many domains wD1 accumulate. But all the
wD1 are congruent simplices, so we can’t pack infinitely many of them near a point. Weconclude that
⋃w∈W wD1 = V1 and that the Tits cone is the half space {0}∪{x : 〈x, δ〉 ≥ 0}.
20. Affine Coxeter groups as semidirect products
We now know that discrete Euclidean reflection groups are all Coxeter groups, and thatthe connected ones are of two kinds:
• Finite groups• Affine groups, meaning groups coming from a connected positive semi-definite Cartan
matrix. These have signature + + + · · ·+ 0.
What remains of our claims from section 17 is to show that the affine groups are preciselythe groups of the form W n Z〈α∨i 〉 where W is a finite connected crystallographic Coxetergroup and (Φ,Φ∨) is a corresponding crystallographic root system.
Let W be a finite connected crystallographic Coxeter group and let (Φ,Φ∨) bea corresponding crystallographic root system in some inner product space V .Set W := W n Z〈α∨i 〉 is clearly a subgroup of Euc(V ). We will show that W is a discretereflection group.
First, we check that it is a reflection group. Let t be any reflection of W and let (β, β∨) bea corresponding root and coroot. Then the element (t, β∨) in W n Z〈α∨i 〉 is the orthogonalreflection over {x : 〈x, β〉 = 1}, and (t, 0) is the orthogonal reflection over {x : 〈x, β〉 = 0}.Let G be the subgroup of W generated by these reflections; we will show that G is the wholegroup.
Since G contains all of the (si, 0), it contains the subgroup W n {0} = W of W . We alsocompute that (si, α
∨i )(t, 0) = (e, α∨i ), so G contains the translation by α∨i . Thus, G contains
Z〈α∨i 〉. The subgroups W and Z〈α∨i 〉 generate W .

BASIC STRUCTURE OF COXETER GROUPS 33
We will want to know the complete list of reflections in W . An element (σ, γ) of Euc(V )squares to the identity if and only if σ2 = e and σ(γ) = −γ. It is a reflection if and onlyif, additionally, σ is a reflection. So the reflections of W are the elements of the form (t, γ)where t is a reflection of W and t(γ) = −γ. The latter equation shows that we must haveγ ∈ Rβ∨t . A type by type check shows that Rβ∨t ∩Z〈α∨i 〉 = Zβ∨t . (I don’t know a conceptualproof of this.) We conclude that the reflections of W are precisely the elements (t, kβ∨t ) fork ∈ Z. The corresponding fixed hyperplanes are {x : 〈x, βt〉 = k}.
In particular, the hyperplanes fall into finitely many parallel classes (one for each t ∈ T ), sothe hyperplane arrangement is discrete and W is a discrete reflection group. By Section 18,W is a Coxeter group.
Now suppose that W is an affine group: As discussed in Section 19, we can build aninner product space V0 and principal homogenous space V1 so that W can be thought of asa subgroup of Euc(V1). The reflecting hyperplanes of W are of the form {x : 〈x, β〉 = k} forvarious β ∈ V0 and k ∈ R. We start with the following lemma:
Lemma. Up to rescaling, only finitely many normal vectors β occur for reflecting hyper-planes in W .
Proof. The unit sphere in V0 is compact, so it is enough to prove a lower bound for the anglebetween β1 and β2 for β1 and β2 not parallel. Equivalently, we want to show a lower boundfor the angle between non-parallel hyperplanes H1 and H2. Since H1 and H2 are assumednon-parallel, they meet at some point x in V1. By the end of Section 19, x lies in wD1 forsome w ∈ W . But w acts by Euclidean symmetries, so we may replace H1 and H2 by w−1H1
and w−1H2 to assume that the hyperplanes meet D1. But W is discrete, so only finitelymany hyperplanes meet D1. �
Now, consider the short exact sequence 1 → V0 → Euc(V1) → O(V0) → 1. Define W tobe the image of W in O(V0) and define P = W ∩ V0. So we have a commutative diagramwith exact rows:
1 // P // W // W // 1
⊇ ⊇ ⊇
1 // V0// Euc(V1) // O(V0) // 1
(∗)
Now, W is generated by the images of the reflections of W , and our lemma above showsthat these reflections only have finitely many images in O(V0). So W is a finite reflectiongroup, and is thus a finite Coxeter group.
Lemma. Let t be a reflection of W . Then we can lift t to a reflection in W .
Note a generic lift of t to Euc(V1) will be a glide reflection, so there is something to provehere.
Proof. Let T and T be the sets of reflections in W and W . The quotient map induces a mapT → T , which we want to prove is surjective. Let X denote the image of this map.
Since T is conjugacy invariant in W , and W → W is surjective, we see that X is aconjugacy invariant subset of T . Also, T generates W (since W is a reflection group) andW → W is surjective, so X generates W . The claim now follows if we can show that, if Xis a proper conjugacy invariant subset of T then X does not generate W .

34 BASIC STRUCTURE OF COXETER GROUPS
I can give a conceptual proof of this statement, which is true for infinite W as well, butit is much faster to just check cases: On the homework, we gave a criterion for when tworeflections are conjugate. In types ADEH and I2(2k + 1), all reflections are conjugate, sothe claim is immediate. In types Bn, F4 and I2(2k), there are two conjugacy classes ofreflections. If we take just one conjugacy class of reflection in these types, we generate thefollowing proper subgroups: In Bn, either An1 or Dn; in F4, a subgroup isomorphic to D4; inI2(2k), the subgroup I2(k). �
Lemma. The short exact sequence 1 → P → W → W → 1 is semidirect. In other words,W = W n P .
We note that this does not follow from the diagram (∗) alone. As a simple example,let τ be the glide reflection [ xy ] 7→
[x+1−y]
and consider the group 〈τ〉 that τ generates inEuc(R2). Then 〈τ〉 ∩ R2 = [ 2Z
0 ] and the image of 〈τ〉 in O(R2) is [ 1±1 ]. So we have a short
exact sequence 1 → [ 2Z0 ] → 〈τ〉 → [ 1
±1 ] → 1 where the left group is a discrete translationsubgroup of R2 and the right group is a reflection group of R2, but the sequence is notsemidirect. The reader might think this is because [ 2Z
0 ] does not have full rank in R2 butthis is wrong; let τ1 [ xy ] =
[x+1−y]
and τ2 [ xy ] =[ −xy+1
]. Then the group generated by these
glide reflections sits in a short exact sequence 1→ [ 2Z2Z ]→ 〈τ1, τ2〉 →
[ ±1±1
]→ 1 which is,
once again, not semidirect. What we need to show is that we cannot have this happen if ourgroup is generated by reflections, rather than glide reflections.
Proof. Take simple generators si of W . Lift them to reflections si in W . We claim thisextends to a right splitting W ← W . We must simply check that the si obey the Coxeterrelations. Since the si are reflections, they obey s2
i = e. For i 6= j, the fixed affine hyperplanesof si and sj meet at the same angle as the fixed central hyperplanes of si and sj, so we have(sisj)
mij = e. �
We note that this argument also shows that W can be taken to be a parabolic subgroup ofW . The fixed planes of the si intersect at some point x of V1. (They are affine hyperplaneswith linearly independent normal vectors.) The stabilizer of x in W is the image W for thesplitting we just constructed. But the stabilizer of any point in the Tits cone is a parabolicsubgroup.
What remains is to show that W is crystallographic and that P is Z〈α∨i 〉 for some Crys-tallographic root system Φ∨ of W .
We first note that P is a lattice. P is constructed as an additive subgroup of the vectorspace V0. Using that W is discrete, it is easy to see that P is discrete. We must also showthat P spans V1. If not, then P is contained in some proper linear subspace L. But then thefinitely many domains wD for w ∈ W would only reach a bounded distance from L (recallthat D is a simplex, and in particular bounded), so the translates of D by W n P wouldlikely only reach a finite distance from L, contradicting that the W n P translates of D fillV1. So P is a lattice.
Since W preserves a lattice, it is crystallographic. Let α∨i be the minimal (−1)-eigenvectorof si in the lattice P and let αi = 2αi
αi·αi . Then we showed earlier that these form crystallo-
graphic roots and co-roots for W and that any W -invariant lattice lies between Z〈α∨i 〉 andZ〈αi〉∨. But, as computed at the end of Section 16, any reflection in W n P must lie in thesmaller group W n Z〈α∨i 〉. So the claim that W is a reflection group means that we musthave P = Z〈α∨i 〉 as claimed. �

BASIC STRUCTURE OF COXETER GROUPS 35
Figure 14. The hyperboloid Q = Q+ ∪Q−
21. Hyperbolic Coxeter groups
Here is a summary of the different types of Coxeter groups that give pretty pictures:
• Positive definite bilinear forms correspond to finite Coxeter groups which look liketriangulations of the sphere Sn−1.• Positive semi-definite bilinear forms correspond to affine Coxeter groups which look
like triangulations of the affine space Rn−1.• Bilinear forms with signature (+ + ...+−) correspond to hyperbolic Coxeter groups
which look like triangulations of the hyperbolic space Hn−1.
We’ve seen two of these, and we now sketch the third.Hyperbolic geometry: Let V be an n-dimensional real vector space with a symmetric
bilinear form, the dot product · with signature (+n−1−). Let Q = {~v ∈ V : ~v · ~v = −1}.This is a hyperboloid of two sheets. Call this hyperboloid Q and denote its sheets by Q+
and Q− respectively. Each sheet, as a manifold, is an open ball of dimension n− 1.For ~v ∈ Q+, we have the tangent space T~vQ+ = {~x ∈ V : ~v · ~x = 0} = ~v⊥. Restricting· to T~vQ gives a positive definite dot product on T~vQ (because V = R~v ⊕ (~v)⊥). So Q+ isnaturally a Riemannian manifold, commonly called the hyperbolic plane/space/disk.
Given ~v ∈ V with ~v · ~v > 0, we can reflect over ~v⊥ in the following way:
~x 7→ ~x− 2~v · ~x~v · ~v
~v.
This takes Q+ to itself. Thus, we can talk about hyperbolic reflection groups, which areorder two isometries fixing hyperplanes in hyperbolic space.
If n = 3 then Q+ is a two dimensional disc. There are two standard ways of explicitlyidentifying Q+ with the unit disc in R2.
The Klein model Take an affine plane, K, separating the origin from Q+. Plot ~x ∈ Q+
at the intersection of R~x with K. See Figure 15. The picture will be contained within anopen ball and hyperplanes are represented as affine hyperplanes in the open ball.
Poincare model Choose ~v ∈ Q+. Plot ~x ∈ Q+ at the intersection of the line through−~v and ~x with T~vQ+. See Figure 16. In the Poincare model, lines are arcs of circlesperpendicular to the boundary of the disk. The Poincare model is conformal, meaning that

36 BASIC STRUCTURE OF COXETER GROUPS
Figure 15. The point x represents the image of a point in the Klein model
Figure 16. The point x represents the image of a point in the Poincare model
angles are correct. It also puts things nearer to the center of the disk, so the diagram canrender more detail.
Example. Consider the Cartan matrix and reflection group given as follows:
A =
2 −2 −2−2 2 −2−2 −2 2
W = 〈s1, s2, s3|s21 = s2
2 = s23 = 1〉
The left and right sides of Figure 17 draw this arrangement in the Klein and Poincare models.

BASIC STRUCTURE OF COXETER GROUPS 37
Figure 17. A Triangulation in the Klein model and the Poincare models
If we have α1, ..., αn ∈ V with αi · αi = 2 and αi · αj ∈ {−2 cos πm
: m ≥ 2} ∪ (−∞,−2]and {x : αi · x > 0} 6= ∅ we’ll get a Coxeter group acting on Q+. We can do this if A issymmetric with signature (+ + ... + −). Take V to be the vector space on basis {αi} anddefine · by αi · αj = Aij.
Example. If we want m12 = m13 = m23 = 4 (i.e. triangles with all angles equal to π4) then
use the Cartan matrix 2 −√
2 −√
2
−√
2 2 −√
2
−√
2 −√
2 2
We can also get hyperbolic tilngs by polytopes other than simplices. Suppose that A is
a symmetric Cartan matrix with signature +n−10r−. Then we can find n + r vector in Vwhich pair by A, and thus get a polytope in hyperbolic n− 1 space with n+ r facets.
Example. Suppose we want to tile the disk with pentagons whose angles are all π2. Then
we need m12 = m23 = ... = m51 = 2 and m13 = m24 = ... =∞. So our Cartan matrix shouldbe of the form
A =
2 0 −α −α 00 2 0 −α −α−α 0 2 0 −α−α −α 0 2 00 −α −α 0 2
with α ≥ 2
We can achieve signature + + 00− if we take α = 1 +√
5. (More generally, we could choose5 distinct values for off diagonal terms, constrained to make this matrix have rank 3, andget hyperbolic pentagons with angles π
2and sides of different lengths.) Here is the resulting
tiling.

38 BASIC STRUCTURE OF COXETER GROUPS
However, there is a technical point to worry about. How will D relate to Q+? In all ourexamples so far, · is ≤ 0 on D and Tits(W ) filled up the cone R≥0Q+.
Here is the answer: We always have R≥0Q+ ⊆ Tits(W ). The domain D \ {0} is in theinterior of R≥0Q+ if and only if the (n−1)× (n−1) principal minors are positive definite or,equivalently, if the parabolic subgroups are finite. The domain D is in the closure of R≥0Q+
if and only if the (n− 1)× (n− 1) principal minors are positive semidefinite or, equivalently,if the parabolic subgroups are finite or affine.
If some of these principal minors have − part to their signature, then D sticks out of theoutside of Q+.
Example. Let A =[
2 −2.2 −2.2−2.2 2 −2.2−2.2 −2.2 2
]. The corresponding Coxeter has m12 = m13 = m23 =∞,
just as in Figure 17. Figure 18 depicts this example in the Klein model. There is no naturalway to draw this picture in the Poincare model, because the Poincare model has no naturalplace to draw points not coming from Q+.
Figure 18. Klein model for an example with negative signature
Notational warning: A Coxeter group is only called hyperbolic if D does not stick outof R≥0Q+. The hyperbolic Coxeter groups have been classified, but the list is quite long.