besonderheiten und einstellungen von bldc-motoren · schritt 2: den motor mit einem externen...
TRANSCRIPT

Besonderheiten und Einstellungen
von BLDC-Motoren
© Nanotec 2013

Besonderheiten von BLDC-Motoren auf der Registerkarte "Input" - Das Hallsignal kann über den
Status der Eingänge 1 bis 3 beobachtet werden. Dazu muss das Kontrollkästchen "Activate Input Polling" aktiviert sein.
- Die Eingänge 1 bis 3 müssen wegen des Inverterschaltkreises am Halleingang der Steuerung SMCI36 low-aktiv konfiguriert werden.
- Die Eingänge 1 bis 3 können dann nicht mehr als normale Eingänge genutzt werden.
Besonderheiten von BLDC-Motoren
Übung: Konfigurieren Sie die Eingänge 1 bis 3 low-aktiv.
© Nanotec 2013

Übung: Richten Sie Ihre Steuerung für den BLDC-Motor gemäß dem Datenblatt ein.
ACHTUNG! Bei falschen Einstellungen können Motor und Steuerung beschädigt werden!
Besonderheiten von BLDC-
Motoren auf der Registerkarte
"Motor Settings"
- Motor Design
- Motor Type
- Motor Name
- Pole pairs
- BLDC T(t)
- BLDC I (max)
Besonderheiten von BLDC-Motoren
© Nanotec 2013
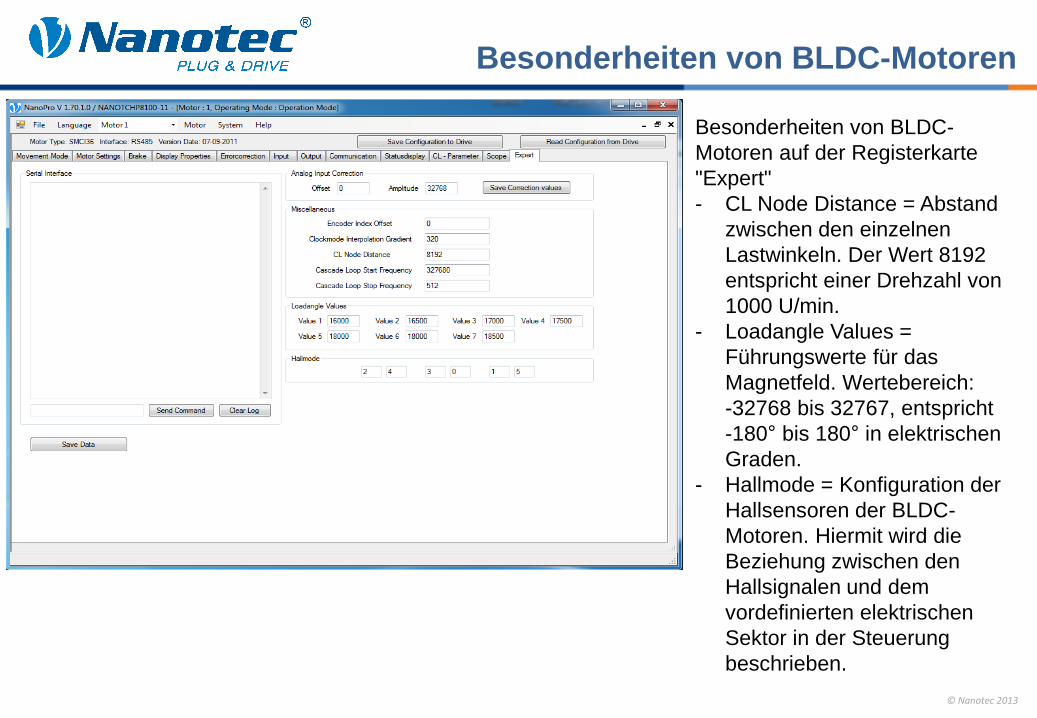
Besonderheiten von BLDC-
Motoren auf der Registerkarte
"Expert"
- CL Node Distance = Abstand
zwischen den einzelnen
Lastwinkeln. Der Wert 8192
entspricht einer Drehzahl von
1000 U/min.
- Loadangle Values =
Führungswerte für das
Magnetfeld. Wertebereich:
-32768 bis 32767, entspricht
-180° bis 180° in elektrischen
Graden.
- Hallmode = Konfiguration der
Hallsensoren der BLDC-
Motoren. Hiermit wird die
Beziehung zwischen den
Hallsignalen und dem
vordefinierten elektrischen
Sektor in der Steuerung
beschrieben.
Besonderheiten von BLDC-Motoren
© Nanotec 2013

un = KP * en + KI * en + KD * (en-1 - en)
un Steuervariable
en Abweichung des Istwerts vom Sollwert
en-1 Abweichung des vorherigen Istwerts
vom vorherigen Sollwert
Parallelstruktur Sprungantwort
KP Proportionalkomponente
KI Integralkomponente
KD Differentialkomponente
PID-Steuerungsparameter
© Nanotec 2013

Übung: Stellen Sie die PID-Parameter unter "Velocity Loop" und "Position Loop" entsprechend dem
verwendeten Motor ein.
- Der Regelkreis "Velocity" wird
für den Drehzahlmodus, den
Analogmodus und den
Joystickmodus verwendet.
- Der Regelkreis "Position" wird
für den relativen/absoluten
Positionsmodus, den
Flagpositionsmodus, den
Taktrichtungsmodus, den
analogen Positionsmodus und
die Referenzfahrt verwendet.
- "Cascade Speed Loop" und
"Cascade Position Loop"
werden selten verwendet.
PID-Steuerungsparameter
© Nanotec 2013
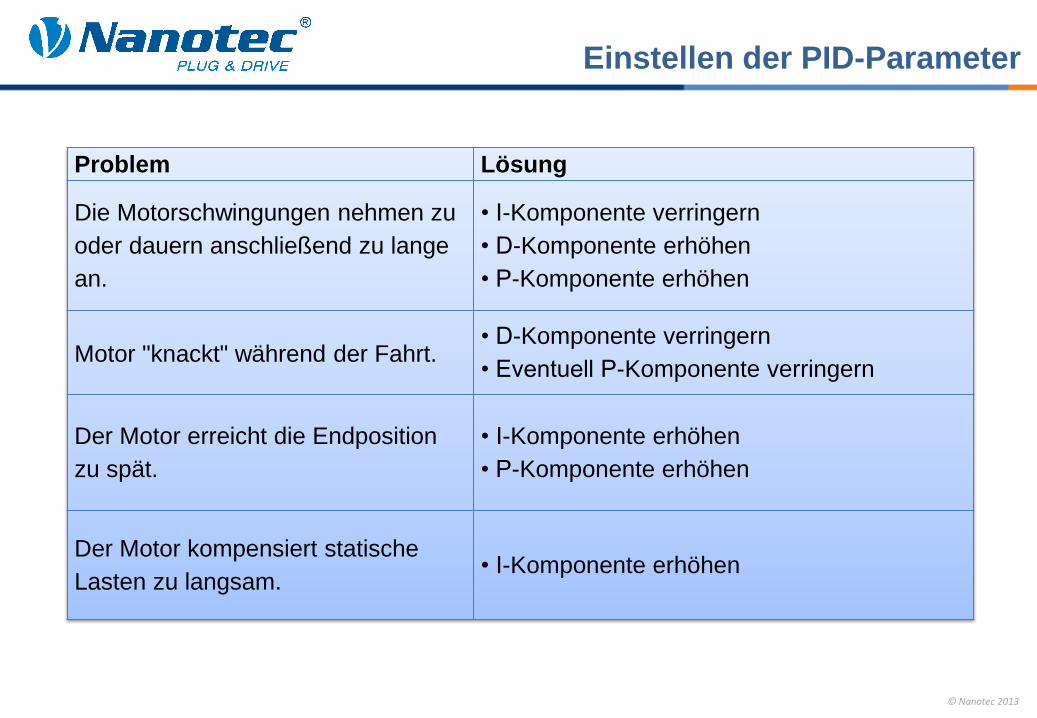
Problem Lösung
Die Motorschwingungen nehmen zu
oder dauern anschließend zu lange
an.
• I-Komponente verringern
• D-Komponente erhöhen
• P-Komponente erhöhen
Motor "knackt" während der Fahrt. • D-Komponente verringern
• Eventuell P-Komponente verringern
Der Motor erreicht die Endposition
zu spät.
• I-Komponente erhöhen
• P-Komponente erhöhen
Der Motor kompensiert statische
Lasten zu langsam. • I-Komponente erhöhen
Einstellen der PID-Parameter
© Nanotec 2013
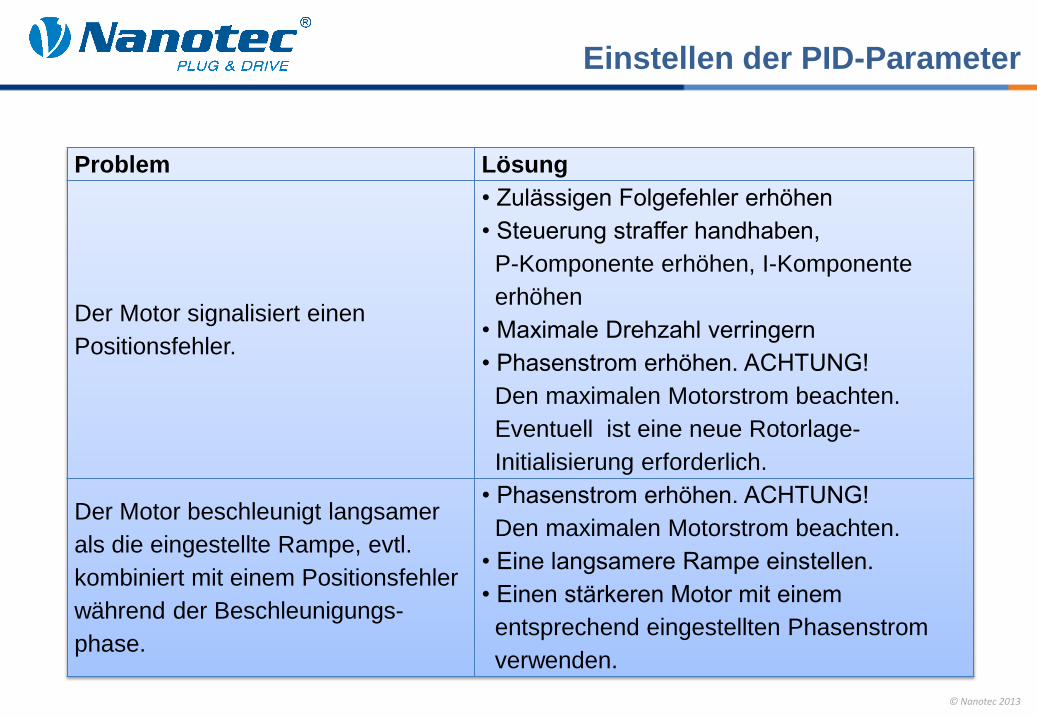
Problem Lösung
Der Motor signalisiert einen
Positionsfehler.
• Zulässigen Folgefehler erhöhen
• Steuerung straffer handhaben,
P-Komponente erhöhen, I-Komponente
erhöhen
• Maximale Drehzahl verringern
• Phasenstrom erhöhen. ACHTUNG!
Den maximalen Motorstrom beachten.
Eventuell ist eine neue Rotorlage-
Initialisierung erforderlich.
Der Motor beschleunigt langsamer
als die eingestellte Rampe, evtl.
kombiniert mit einem Positionsfehler
während der Beschleunigungs-
phase.
• Phasenstrom erhöhen. ACHTUNG!
Den maximalen Motorstrom beachten.
• Eine langsamere Rampe einstellen.
• Einen stärkeren Motor mit einem
entsprechend eingestellten Phasenstrom
verwenden.
Einstellen der PID-Parameter
© Nanotec 2013

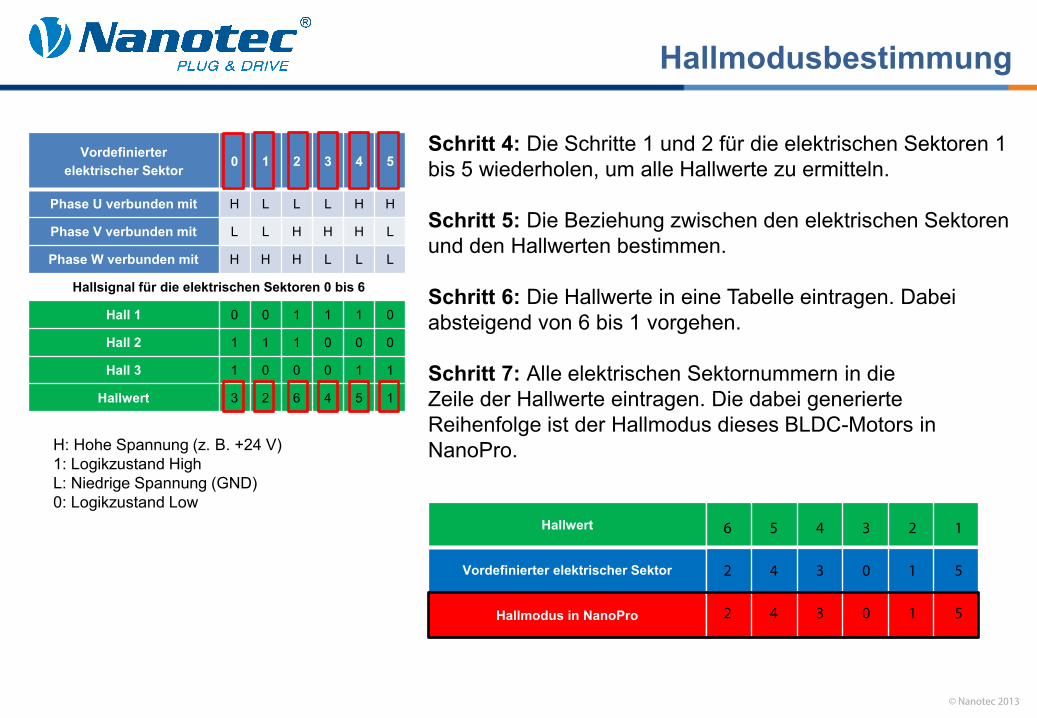
Vordefinierter
elektrischer Sektor 0 1 2 3 4 5
Phase U verbunden mit H L L L H H
Phase V verbunden mit L L H H H L
Phase W verbunden mit H H H L L L
Hallsignal für die elektrischen Sektoren 0 bis 6
Hall 1 0
Hall 2 1
Hall 3 1
Hallwert 3
Schritt 1: Den Hallsensor mit der SMCI36 verbinden, die
SMCI36 an das Netzteil anschließen und NanoPro öffnen.
Schritt 2: Den Motor mit einem externen Netzteil für den
elektrischen Sektor 0 mit Strom versorgen, die Phasen U und
W werden mit hoher Spannung (z. B. +24 V) betrieben,
Phase V wird mit niedriger Spannung (GND) betrieben.
ACHTUNG! Der maximale Strom des externen Netzteils
muss unter dem Nennstrom des Motors liegen!
Schritt 3: Das Hallsignal in NanoPro über den
Eingangsstatus für den elektrischen Sektor 0 auslesen und
den Hallwert aus dem Hallsignal als Dezimalzahl berechnen.
Beispiel: Der Hallwert für den elektrischen Sektor 0 beträgt
(011)2 = 3.
H: Hohe Spannung (z. B. +24 V)
1: Logikzustand High
L: Niedrige Spannung (GND)
0: Logikzustand Low
1 (Logikzustand High)
0 (Logikzustand Low)
Hallmodusbestimmung
© Nanotec 2013
Vordefinierter elektrischer Sektor 0 1 2 3 4 5
Phase U verbunden mit H L L L H H
Phase V verbunden mit L L H H H L
Phase W verbunden mit H H H L L L
Hallsignal für die elektrischen Sektoren 0 bis 6
Hall 1 0 0 1 1 1 0
Hall 2 1 1 1 0 0 0
Hall 3 1 0 0 0 1 1
Hallwert 3 2 6 4 5 1
Schritt 4: Die Schritte 1 und 2 für die elektrischen Sektoren 1 bis 5 wiederholen, um alle Hallwerte zu ermitteln. Schritt 5: Die Beziehung zwischen den elektrischen Sektoren und den Hallwerten bestimmen. Schritt 6: Die Hallwerte in eine Tabelle eintragen. Dabei absteigend von 6 bis 1 vorgehen. Schritt 7: Alle elektrischen Sektornummern in die Zeile der Hallwerte eintragen. Die dabei generierte Reihenfolge ist der Hallmodus dieses BLDC-Motors in NanoPro.
H: Hohe Spannung (z. B. +24 V) 1: Logikzustand High L: Niedrige Spannung (GND) 0: Logikzustand Low
Hallwert 6 5 4 3 2 1
Vordefinierter elektrischer Sektor 2 4 3 0 1 5
Hallmodus in NanoPro 2 4 3 0 1 5
Hallmodusbestimmung
© Nanotec 2013
6 5 4 3 2 1
2 4 3 0 1 5
2 4 3 0 1 5

Teambesprechung Fertigung / Nov. 2012
Nanotec Electronic GmbH & Co. KG
Kapellenstr. 6
D-8522 Feldkirchen b. München
Tel.: +49 (0) 89 - 900 686 - 0
Fax: +49 (0) 89 - 900 686 -50
www.nanotec.com
Vielen Dank für
Ihre
Aufmerksamkeit!