biological control mechanisms for oscillation and locomotion
TRANSCRIPT

The 31st Chinese Control ConferenceJuly 2527, 2012, Hefei, China
Biological Control Mechanisms for gOscillation and Locomotion
T IwasakiT. IwasakiUCLA

Motivation:Animal locomotion

Locomotion Control Systemy
B iBrainHigh-level commands
(e.g. start/stop)CPG
( g p)
Command for rhythmic l t ti
Bodymuscle contraction
EnvironmentCPG is directly
responsibleresponsible for locomotion

“Systems” View PointSystems View Point
CPGMembrane Potential
Membrane Potential Find Principles Behind:
Adaptive pattern formationMotoneuronStretch ReceptorBiological Oscillator
Adaptive pattern formationCoupled oscillator/rectifierDistributed local feedback Impulses
Muscle
Tension Length
Tension
Mechanical Rectifier
Distributed local feedback
Body
Tension Length
FV l it
Mechanical Rectifier
Velocity
Fluid
ForceVelocity
Example: Leech swimming

Robotics Applications
Crawling/
pp
Bio-inspired RobotsNew Functionalities from
A i l L i
Crawling/Walking Robot
Animal Locomotion:
Effi iMicro
EfficiencyRobustness Ad bili
Aerial Vehicle
AdaptabilityAgilityS l h Autonomous Stealth
…Autonomous Underwater VehicleVehicle
Medical ApplicationsMedical Applications
Understanding of CPG mechanisms will help to address issues such as:address issues such as:
ProsthesisNeurological DisordergLocomotor Rehab.Spinal Cord InjurySpinal Cord Injury
…

Technical ChallengesTechnical Challenges
Understand biological mechanisms andl i i i i i l ftranslate into engineering principles of:
OptimalityOptimalityConformityAdaptivityAdaptivityComplexity

OptimalityWhat is the most “efficient” gait?

ConformityConformityHow to exploit inherent dynamics?
(natural oscillation)
Human walking exploits
(natural oscillation)
Human walking exploitsresonance of leg pendulum
Undulatory swimming exploits “naturaly g poscillation” of body-fluid dynamics?
How do we define and characterize“natural oscillation” for locomotion? natural oscillation for locomotion?

Adaptivityp yHow to adapt the gait to environment?
Ref.Gen.
CPGRegulator
BodyBody y
Environment
y
EnvironmentGround GroundIce IceEnvironmentEnvironment
E i i Bi l g
Ground GroundIce Ice
Engineering Biology

Complexityp yHow to generate various gait patterns?
Tritonia Lamprey Leech
Locust

Central Pattern Generator(CPG)

Various Gait Patterns existVarious Gait Patterns exist
Atlantic Ray(undulator)
Cownose Ray(oscillator)(oscillator)
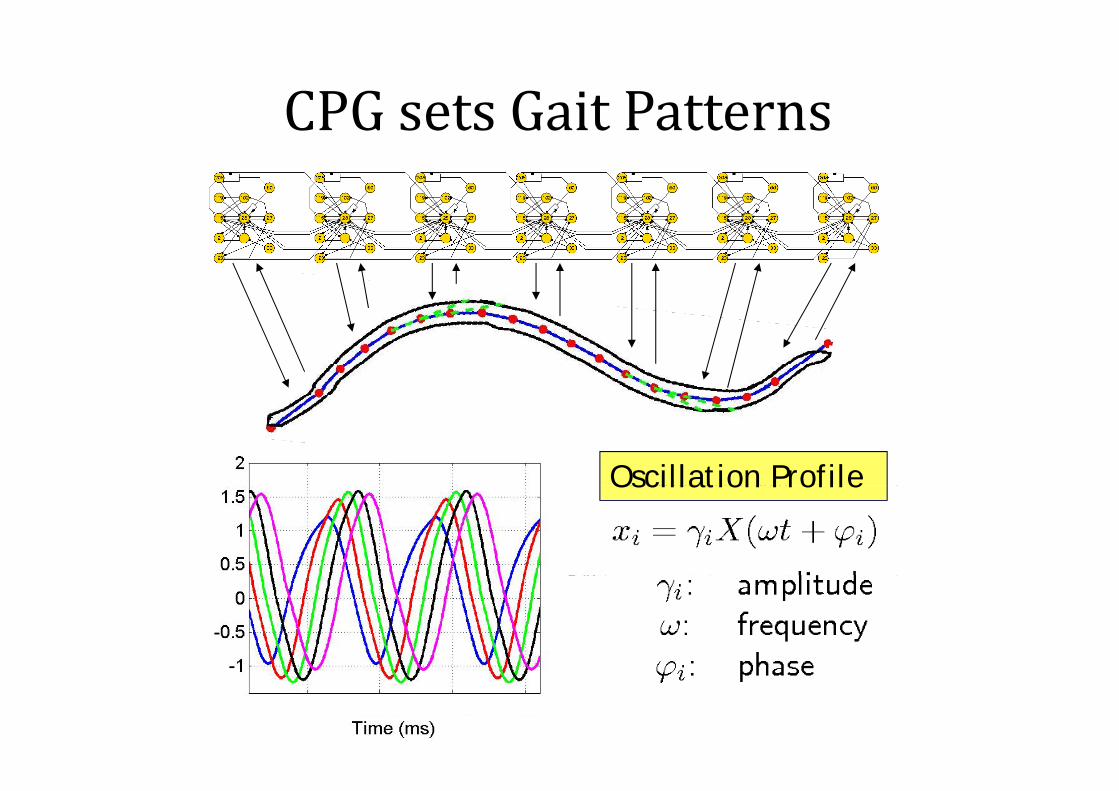
CPG sets Gait PatternsCPG sets Gait Patterns
Oscillation ProfileOscillation Profile

G l P tt Ph PlP tt F ti P blGeneral Pattern on Phase PlanePattern Formation Problem

More GenerallyMore Generally …
Gl b l P tt F ti i Global Pattern Formation via Local Dynamic Interactions inMulti-agent Complex Systems
• Gene regulatory networks• Neuronal circuits (Brain/CPG)• Neuronal circuits (Brain/CPG)• Bird flocking, fish schooling• Climate dynamics• Climate dynamics• Power grids• Traffic• Traffic• …

Problem Statement
R kRemarks:

Definition: Orbital StabilityDefinition: Orbital Stability
Dynamical SystemDynamical System
Periodic Orbit x
Orbital Stability

A Complication

Possible ApproachesPossible ApproachesGeneral methods (linearization, averaging, Floquet, …)( g g q )‐ Guckenheimer and Holmes 1997‐ Hoppensteadt and Izhikevich 1997 I hik i h 2007‐ Izhikevich 2007‐ Farkas 2010Weakly Coupled Oscillators (Phase model)Weakly Coupled Oscillators (Phase model)‐ Kuramoto 1984‐ Ermentrout and Kopell 1984 p‐ Winfree 2001Contraction TheoryL h ill d Sl i 1998‐ Lohmiller and Slotine 1998
Multivariable Harmonic Balance‐ Mees 1981 Iwasaki 2008 Chen et al 2008Mees 1981, Iwasaki 2008, Chen et al. 2008

Our Approachpp
Coordinate transformationsCoordinate transformationsIsolate the rigid body mode
LinearizationLP dynamics for phase & amplitude
Weak coupling + AveragingdLTI dynamics

Coordinate TransformationWeakly Coupled Oscillators Limit Cycle
Coordinate Transformation

Linearization + AveragingLinearization Averaging
Rigid Body Mode

TheoremTheorem
blLMI Problem

Structured Design

Multi‐Pattern Designg

ConclusionBiological oscillations in animal locomotion provide a research platform for• robotics• neural information processing• complex systems• complex systems
Coupled harmonic oscillatorsCoupled harmonic oscillators can be designed by LMIs through
k li i• weak coupling + averaging• coordinate transformation• Floquet multiplier

AcknowledgmentsAcknowledgmentsColleagues:
( )Otto Friesen (UVA)Zhiyong Chen (USTC ‐…‐> Univ.Newcastle)
Students and postdocs:X Liu S Kohannim A Wu (UCLA)X. Liu, S. Kohannim, A. Wu (UCLA)J. Blair, T. Bliss, J. Chen (UVA) Y Futakata J Tian M Zheng (UVA)
Funding agencies:l d ( )
Y. Futakata, J. Tian, M. Zheng (UVA)
National Science Foundation (USA)National Institutes of Health (USA)ff f l h ( )Office of Naval Research (USA)

Thank you!Thank you!

ReferencesModeling of leech swimming
Tian, Iwasaki, and Friesen, Journal of Comparative Physiology A, 2007.Zheng Friesen and Iwasaki Journal of Computational Neuroscience 2007Zheng, Friesen and Iwasaki, Journal of Computational Neuroscience, 2007.Tian, Iwasaki, and Friesen, Journal of Comparative Physiology A, 2010. Chen, Friesen, Iwasaki, Journal of Experimental Biology, 2011Chen, Tian, Iwasaki, Friesen, Journal of Experimental Biology, 2011Chen, Tian, Iwasaki, Friesen, Journal of Experimental Biology, 2011Chen, Friesen, Iwasaki, Journal of Experimental Biology, 2012
Optimal gait of locomotionHumphrey, Chen, Iwasaki, Friesen, J. of Royal Society Interface, 2010.p y, , , , y y ,Blair and Iwasaki, IEEE Transactions on Automatic Control, 2011.
CPG analysis and synthesisIwasaki, Automatica, 2008.Chen, Zheng, Friesen, and Iwasaki, J. Computational Neuroscience, 2008.Chen and Iwasaki, IEEE Transactions on Automatic Control, 2008.Chen and Iwasaki, Systems & Control Letters, 2009.
Feedback control by CPGIwasaki and Zheng, Biological Cybernetics, 2006.Futakata and Iwasaki, Journal of Mathematical Biology, 2008.F t k t d I ki IEEE T ti A t ti C t l 2011Futakata and Iwasaki, IEEE Transactions on Automatic Control, 2011.