boundaryvalue)problems - boston...
TRANSCRIPT

Boundary Value Problems

Classical ODE Problems Initial Value Problem (IVP) vs Boundary Value Problem (BVP)
(1) IVP equation
(2) BVP equation
An example of BVP is heat conduction along a long, thin rod with length L.

Boundary Value Problem If the rod is not insulated along its length and the system is at a steady state, the equation is given by
where: - 𝛼 is a heat transfer coefficient (m-2) that parameterizes the is a heat transfer coefficient (m-2) that parameterizes the rate of heat dissipation to the surrounding air - Ta is the temperature of the surrounding air (0C)
(12.1)
To obtain a solution for equation (12.1), there must be appropriate boundary conditions. A simple case is where the temperatures at the ends of the rod are held at fixed values:

Boundary Value Problem - Example in (12.1) is called a “two-point boundary value
problem (BVP)” because the solution is known at two points - A two-point BVP includes an ODE and the value of the
solutions at two different locations. - The least order of ODE for BVP is two because (generally)
first order ODE cannot satisfy two conditions.
Suppose, for heat conducting problem along a rod in equation (12.1), the length of the rod is m and the temperatures at is and at is Also, the heat transfer coefficient m-2. We assume that the temperature of the surrounding air is a gradient of the form

Boundary Value Problem Here, the heat conduction problem in equation (12.1) becomes
We can solve the equation (12.2) analytically, by taking and by applying the boundary conditions, from which we get that the particular solution of (12.2) is given by
(12.2)
(12.3)

The Shoo:ng Method This method is based on converting the two-point BVP into an equivalent IVP.
For example, we use the problem in equation (12.1) where now the length of the rod is L = 10 m and
(12.4)
The second order ODE in (12.1) is now expressed as two first order ODEs, by

Fourth-‐Order Runge-‐KuBa Methods
The classical fourth-order Runge-Kutta method
where

The Shoo:ng Method To solve the system of ODEs (12.4), we require an initial value for the new variable z. We guess a value, here z(0) = 10. The numerical solution can obtained using an IVP ODE solver, such as a 4th Runge-Kutta method. We set the step size h = 2.
First, we must solve for all the slope at the beginning of the interval (at x = 0):
Then we calculate the first values of T and z at the midpoint:

The Shoo:ng Method We use the values of T and z to compute the first set of midpoint slopes:
These are used to determine the second set of midpoint predictions,
which can be used to compute the second set of midpoint slopes:

The Shoo:ng Method These are used to determined the predictions at the end of the interval:
which can be used to compute the endpoint slopes
The values of k’s can then be used to compute

The Shoo:ng Method Proceeding in a like manner for the remaining steps yields:
x T z 0 40 10 2 60.5347 10.6033 4 82.6961 11.6322 6 107.3737 13.1297 8 135.5579 15.1505 10 168.3797 17.7810
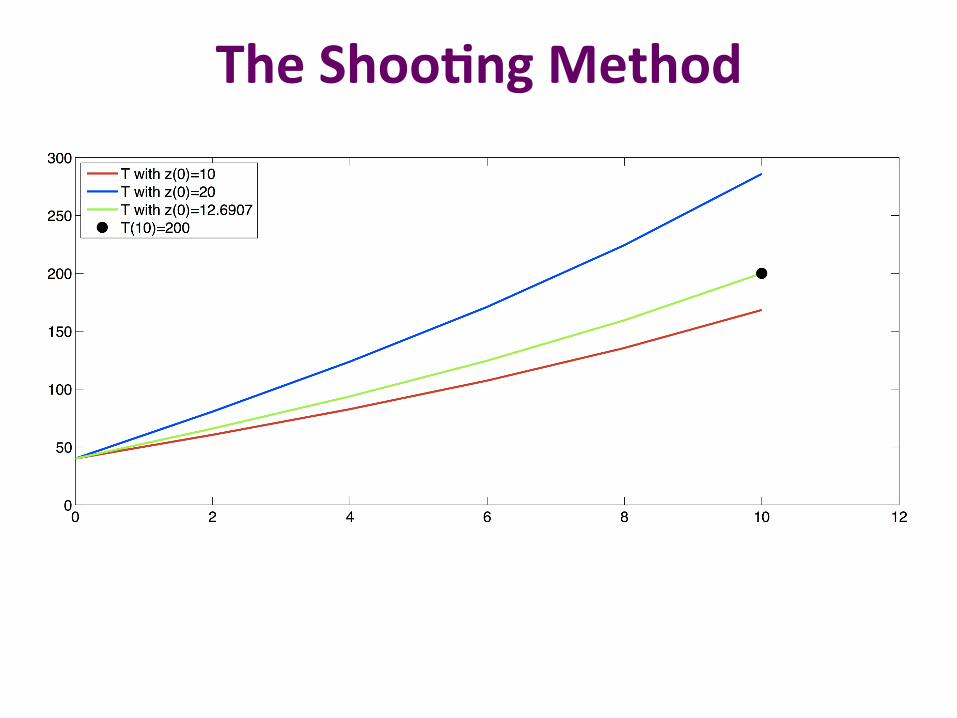
Here the value at the end of the interval of T(10) = 168.3797 which differs from the boundary condition of T(10) = 200. Therefore we make another guess, z(0) = 20, and perform the computation again.

The Shoo:ng Method Then the result of T(10) = 285.8980 is obtained.
Now, since the original ODE is linear, the values
z(0) = 10 resulting T(10) = 168.3797 and
z(0) = 20 resulting T(10) = 285.8980
to calculate the value of z(0) that yields T(10) = 200, that is:
are linearly related. We use a linear interpolation formula
The Shoo:ng Method

The Shoo:ng Method For nonlinear problems, such as
where β = 5×10-8, liner interpolation is no longer can be used to calculate the value of z(0) that yields T(10) = 200. Here we have to make guesses every iteration. Hence, the shooting method is not effective anymore.
(12.5)

Finite-‐Difference Methods Finite-difference methods are the most common alternatives to the shooting method. In these techniques, finite divided differences are substituted for the derivatives in the original equation.
Recall second derivative of centered finite-divided formula with error O(h2):
Consider a simple BVP
(12.6)
(12.7)
which has an exact solution: (prove it!!!)

Finite-‐Difference Methods Divide the interval [0, 1] into M subintervals, with step size
and the points
Let Yi be the approximation to y (xi). For each i = 2, 3, …, M we approximate
by
and the boundary conditions are:

Finite-‐Difference Methods Now we have a linear system of M+1 equations in M+1 unknowns:
which can be transformed into matrix notation.

Finite-‐Difference Methods In matrix notation:
or
and solve it

Finite-‐Difference Methods