brain controlled artificial robotic legs
TRANSCRIPT



Brain computer interface.
It is a direct communication path way
between a human brain or animal brain
and external device.

BRAIN WAVES
There are four categories
Beta waves
Alpha waves
Theta waves
Delta waves

BETA WAVES:-
• Low amplitude
•Faster of all waves
•15-40c/s
ALPHA WAVES:-
•High amplitude
•Non-arousal
•9-14c/s

THETA WAVES:-
•Greater amplitude
•Day dream
•5-8c/s
DELTA WAVES:-
•Greater amplitude
•1.5-4c/s
•Never become zero



• It contains electrodes which are placed on the skull in an arrangement called 10-20 system.
• Main function of the electrode cap is to take the brain signals in the form of electrical signals

Output signal from the electrode cap will
be in the range of milli volt & microvolt
Hence there is a need for amplification
Pair of electrodes-one amplifier
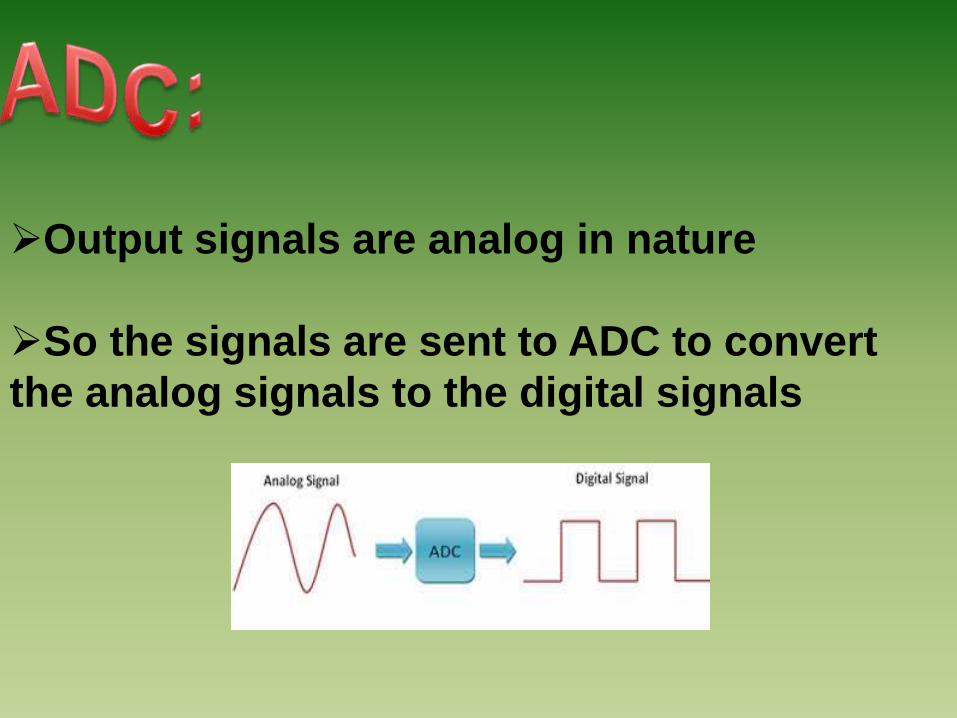
Output signals are analog in nature
So the signals are sent to ADC to convert
the analog signals to the digital signals

Using the ouput signal from the a/d conv.
Parameter extraction, pattern classification & pattern identification are done.
Then the signal is fed to FFT unit for simplifying the calculations

It performs the robotic operations with
the help of stepper motor
It will control the operations like walking,
running etc.

•Waves are pre recorded for operation
•Signals are stored in micro controller
•If brain wave matches with the pre recorded signals then
operation is performed

•Idea can be extended for both the legs
•System is versatile
•Feasible in real time environment

• It uses Li-ion battery
• It require to charge once in 2days
• The life time will be longer when compared to other batteries

Brain Controlled Artificial Legs Normal Artificial Legs
1. Ease of Construction 1. Complex in construction
2.Cost is not more than Rs.5,00,000 2. Cost is about $80,000-
$90,000(Rs.35,00,000 to Rs.40,00,000)
3.User can have full control over the
artificial leg.
3. User cannot have full control over the
artificial leg.
4.Semi-Automatic 4. Fully Automatic
5.Sensors are absent. 5.Sensors are present
6.Requires simple control unit. 6. Requires complex control unit.
• The performance of the proposed system will be better than the existing artificial legs
• With the system life can be made easier for the differently abled persons


