braquistócrona vs. geodésica
DESCRIPTION
Braquistócrona vs. Geodésica. Um problema de C á lculo de Variaç ões. Hugo Ara újo Luso 2006. 1. C á lc ulo de Variaç ões. Objectivo: Procurar mínimos ou máximos de funcion ais. Funcional: Exemplo: Comprimento de arco de curva no plano entre o ponto e . Seja de classe - PowerPoint PPT PresentationTRANSCRIPT

Braquistócrona vs. Geodésica
Um problema de Cálculo de Variações
Hugo AraújoLuso 2006

Luso 2006
1. Cálculo de VariaçõesObjectivo:• Procurar mínimos ou máximos de
funcionais.• Funcional:
• Exemplo:Comprimento de arco de curva no plano entre o ponto e .
Φ : {Curvas} → °
(x0 , y0 ) (x1, y1)
Luso 2006
Seja de classe
Cálculo variacional minimiza funcionais da forma
ondee Diz-se que:
minimiza a funcional se
C1
y*∈C ∀y ∈C : Φ(y*) ≤ Φ(y)
y : x0 , x1[ ] → °
x→ y(x)
C = y: x0 , x1[ ] → ° : y(x0 )=y0 ∧y(x1)=y1{ }
Φ :C→ °
y(x)→ Φ(x,y(x),y'(x))dxx0
x1
∫
y '(x)=dy dx.

Luso 2006
1.1. Equação de Euler-LagrangePretende-se minimizar a funcional:
Assume-se que é de classe
Condição necessária para mínimo:
Eq. de Euler-Lagrange
Uma curva ao longo da qual é verificada a eq. de Euler-Lagrange chama-se de extremal.
ddx
∂Φ∂y'
⎛⎝⎜
⎞⎠⎟=
∂Φ∂y
Φ = F(x, y, y ')dxx0
x1
∫F(x, y, y ') C2

Luso 2006
1.1.1. Casos Particulares da eq. de E-L.
1º Caso - Se F não depende explicitamente de y, isto é,
ou equivalentemente, , a
equação de E-L escreve-se:
2º Caso - Se F não depende explicitamente de x, isto é,
ou equivalentemente, , a equação
de E-L implica: F −y'
∂Φ∂y'
=C ∈°
Φ = F(x, y ')dxx0
x1
∫
ddx
∂Φ∂y'
⎛⎝⎜
⎞⎠⎟=0 ⇒
∂Φ∂y'
=C ∈°
∂F∂y
= 0
Φ = F(y, y ')dxx0
x1
∫ ∂F∂x
= 0
Eq. da energia

Luso 2006
1.1.2. Demonstração do 2º caso particularSeja
Logo, qualquer qualquer extremal verifica a eq. da energia.
Nota 1: O recíproco é verdadeiro se é de classe e
Ψ =F(y, y ') − y '∂F(y, y ')
∂y '
dΨdx
=∂Φ∂y
y'+∂Φ∂y'
y''−y''∂Φ∂y'
−y'ddx∂Φ∂y'
=y'∂Φ∂y
−ddx∂Φ∂y'
⎛⎝⎜
⎞⎠⎟
C 2
yy '≠0.

Luso 2006
1.2. Cálculo de Variações - Exemplo•Exemplo:Comprimento de arco da curva entre eé dado pela seguinte funcional:
Como , e a eq. de E-L é:
As extremais para este problema chamam-se geodésicas.
y(x) (x0 , y0 ) (x1, y1)
Φ = 1 + y '2dxx0
x1
∫
F(x, y, y ')= 1+ (y'(x))2
ddx
y '
1+ (y'(x))2⎛⎝⎜
⎞⎠⎟=0

Luso 2006
2. Braquistócrona no plano• O problema da Braquistócrona foi proposto em 1696 por
Johann Bernoulli.• Este problema consiste em encontrar a curva que
minimiza o tempo de queda, entre dois pontos num mesmo plano vertical, de um corpo largado do ponto inicial e sujeito apenas à força da gravidade.
• A publicação da solução deste problema em 1697, assinala o inicio do cálculo de variações.
Luso 2006
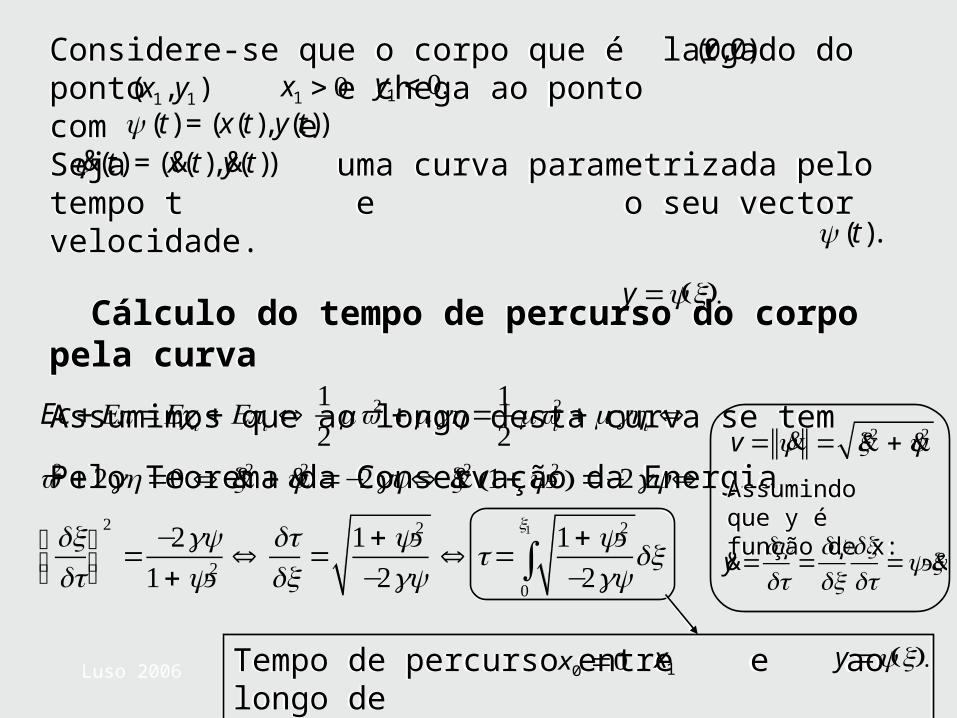
Considere-se que o corpo que é largado do ponto e chega ao ponto com eSeja uma curva parametrizada pelo tempo t e o seu vector velocidade.
Cálculo do tempo de percurso do corpo pela curva
Assumimos que ao longo desta curva se tem
Pelo Teorema da Conservação da Energia
Ec + Ep =Eci + Epi ⇔12mv2 + mgh=
12mvi
2 + mghi ⇔
v2 + 2gh=0 ⇔ &x2 + &y2 =−2gy⇔ &x2 1+ y'2( )=−2gy⇔
dxdt
⎛⎝⎜
⎞⎠⎟2
=−2gy1+ y'2
⇔dtdx
=1+ y'2
−2gy⇔ t=
1+ y'2
−2gy0
x1
∫ dx
y (t) = (x(t), y(t))
&y (t) = ( &x(t), &y(t ))
(0, 0)(x1, y1 ) x1 > 0 y1 < 0.
y =y(x).
y (t).
v = &y = &x2 + &y2
&y =dy
dt=dydx
dxdt=y'&x
Assumindo que y é função de x:
Tempo de percurso entre e ao longo de x0 =0 x1 y =y(x).

Luso 2006
F −y'∂Φ∂y'
=C ⇔ y'=± −1
2C2gy−1 ⇔ y'=± −
k2
y−1
∂F∂x
= 0
Seja k2 =1
2C2g
t =1+ y'2
−2gy0
x1
∫ dx Φ=1+ y'2
−2gy
Pretende-se minimizar a seguinte funcional:
Como , utiliza-se a eq. da energia.
Eq. da energia para o problema da Braquistócrona.
y ' =dydx
=dyds
dxds
⇔dxds
=dyds
y'
Utilize-se a seguinte mudança de variável:
Pelo teorema da função implícita:
y '(x)=± −k2
y(x)−1 ⇔
dxds=±
k2
21−coss( )⇒ x(s)=k
2
2s−sins( )
Resolução da equação diferencialy(s)=−
k2
21−coss( )

Luso 2006
A curva paramétrica
satisfaz a eq. da energia . Esta curva tem o nome de ciclóide.
Nota 2: É possível mostrar que:•A ciclóide define com função de (expressão difícil de obter);•Essa função é de classe e •Pela nota 1 satisfaz a eq. de E-L, pelo que é uma extremal;•A ciclóide é a única extremal.•Usando técnicas de controlo óptimo é ainda possível mostrar que a ciclóide minimiza o tempo de percurso.
y xy x( ) C 2 y '(x)≠0;
y(x)
x(s)=k2
2s−sins( )
y(s)=−k2
21−coss( )
⎧
⎨⎪⎪
⎩⎪⎪
s∈ 0, 2p[ ]k∈° \0{ }

Luso 2006
Vai-se comparar o tempo de queda do corpo pela ciclóide com constante entre os pontos
e o tempo de queda do corpo pela geodésica entre os mesmos pontos.
2.1. Braquistócrona vs. Geodésica
k =1
(0, 0) x3p2
⎛⎝⎜
⎞⎠⎟ , y
3p2
⎛⎝⎜
⎞⎠⎟
⎛⎝⎜
⎞⎠⎟ =
3p4+12,−12
⎛⎝⎜
⎞⎠⎟e
Luso 2006
&x2 + &y2 =−2gy⇔
dsdt
⎛⎝⎜
⎞⎠⎟2 dx
ds⎛⎝⎜
⎞⎠⎟2
+dyds
⎛⎝⎜
⎞⎠⎟2⎛
⎝⎜⎞⎠⎟=−2gy(s)⇔ t=
dxds
⎛⎝⎜
⎞⎠⎟2
+dyds
⎛⎝⎜
⎞⎠⎟2
−2gy(s)0
3p2
∫ ds
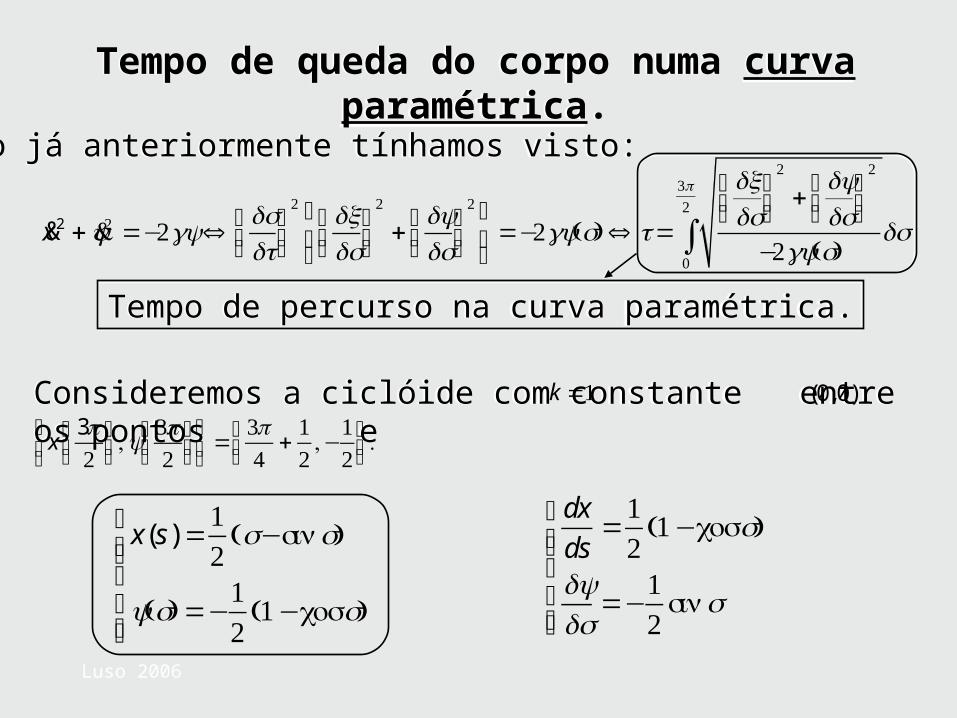
Tempo de queda do corpo numa curva paramétrica.
Como já anteriormente tínhamos visto:
Tempo de percurso na curva paramétrica.
Consideremos a ciclóide com constante entre os pontos e
x(s)=12s−sins( )
y(s)=−121−coss( )
⎧⎨⎪⎪
⎩⎪⎪
(0,0)
x3p2
⎛⎝⎜
⎞⎠⎟ , y
3p2
⎛⎝⎜
⎞⎠⎟
⎛⎝⎜
⎞⎠⎟ =
3p4+12,−12
⎛⎝⎜
⎞⎠⎟ .
k =1
dxds
=121−coss( )
dyds=−
12sins
⎧⎨⎪⎪
⎩⎪⎪

Luso 2006
Tempo de queda do corpo pela recta entre os pontos e
(0, 0)3p4+12,−12
⎛⎝⎜
⎞⎠⎟ .
y =−2
3p + 2x
t =1+ y'2
−2gy0
x1
∫ dx ⇔ t=
3p + 2( )2 + 43p + 2( )2
2g2
3p + 2x0
3p4+12
∫ dx ⇔ t ; 1.85
Verifica-se que o caminho mais rápido é pela ciclóide, com o tempo de aproximadamente 1,064.
Tempo de percurso pela geodésica.
⇔ t =
12
1− cos s( )
−2g −12
1− cos s( )⎛⎝⎜
⎞⎠⎟
0
3π2
∫ ds⇔ t =12g0
3π2
∫ ds ; 1,064
Substituindo,
Tempo de percurso pela ciclóide.

Luso 2006
2.2. TautócronaQuickTime™ and aAnimation decompressor
are needed to see this picture.

Luso 2006
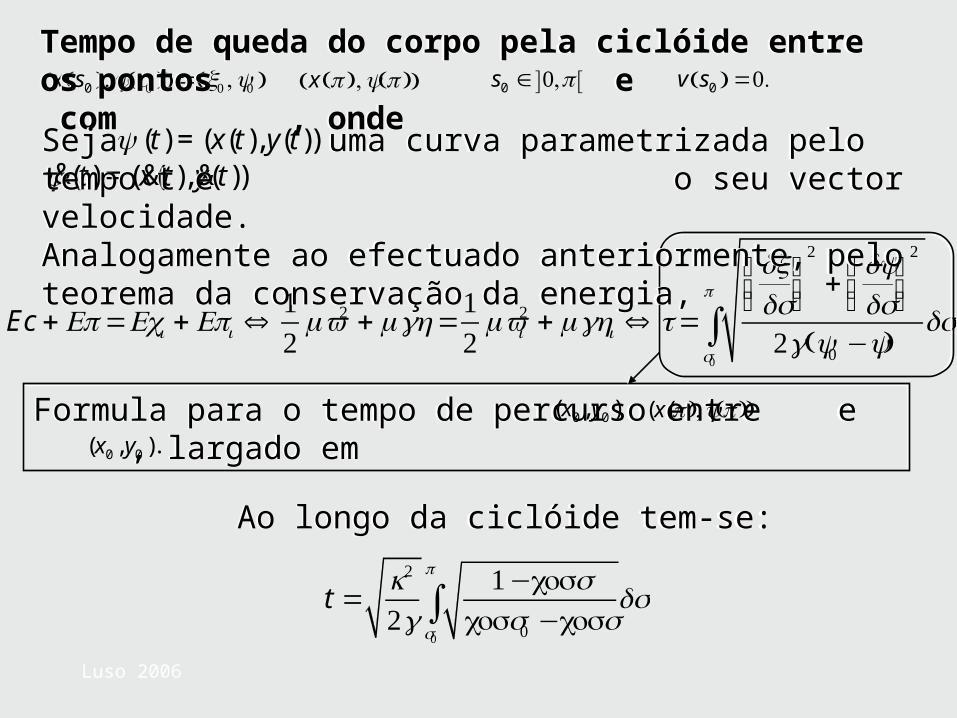
Tempo de queda do corpo pela ciclóide entre os pontos e
Considere-se a ciclóide:
x(s)=k2
2s−sins( )
y(s)=−k2
21−coss( )
⎧
⎨⎪⎪
⎩⎪⎪
(0, 0)x p( ), y p( )( ).
Analogamente ao que foi feito anteriormente, o tempo de queda do corpo pela ciclóide entre os pontos e , é obtido por:(0, 0) x p( ), y p( )( )
t =
dxds
⎛⎝⎜
⎞⎠⎟2
+dyds
⎛⎝⎜
⎞⎠⎟2
−2gy(s)0
p
∫ ds⇔ t=
k4
2(1−coss)
2gk2
2(1−coss)0
p
∫ ds⇔ t= k2
2g0
p
∫ ds⇔ t= k2
2gp
Tempo de percurso entre e , largado em (0, 0) (x(p), y(p)) (0,0).
Luso 2006
x p( ), y p( )( )x s0( ), y s0( )( )= x0 , y0( ) s0 ∈ 0,p] [
Tempo de queda do corpo pela ciclóide entre os pontos e com , onde v s0( )=0.
Formula para o tempo de percurso entre e , largado em
Ec + Ep =Eci + Epi ⇔12mv2 + mgh=
12mvi
2 + mghi ⇔ t=
dxds
⎛⎝⎜
⎞⎠⎟2
+dyds
⎛⎝⎜
⎞⎠⎟2
2g(y0 −y)s0
p
∫ ds
y (t) = (x(t ), y(t))
&y (t) = ( &x(t ), &y(t))
(x0 , y0 )
Seja uma curva parametrizada pelo tempo t e o seu vector velocidade.
Analogamente ao efectuado anteriormente, pelo teorema da conservação da energia,
(x(p), y(p ))(x0 , y0 ).
t =k2
2g1−coss
coss0 −cosss0
p
∫ ds
Ao longo da ciclóide tem-se:

Luso 2006
t =k2
2g
sins2
⎛⎝⎜
⎞⎠⎟
cos2s02
⎛⎝⎜
⎞⎠⎟−cos
2 s2
⎛⎝⎜
⎞⎠⎟
s0
p
∫ ds
⇔ t=k2
2g−2arctan 0( )+ 2arctan +∞( )( )⇔ t=
k2
2gp
1−cos(θ)=2sin2 θ2
⎛⎝⎜
⎞⎠⎟
cos(θ)=2cos2 θ2
⎛⎝⎜
⎞⎠⎟−1
⎧
⎨⎪⎪
⎩⎪⎪
Utilize-se as seguintes igualdades trigonométricas:
Para concluir que:
Tempo de percurso entre e , largado em (x0 , y0 ) (x(p), y(p )) (x0 , y0 ).
Luso 2006
3. Braquistócrona no cilindro vertical
Comece-se por parametrizar o cilindro vertical no plano
Considere-se que o corpo que é largado do ponto e chega ao ponto com e
A curva no cilindro terá por coordenadas paramétricas . Assuma-se que é função de
Proceda-se agora de forma análoga ao efectuado no plano.
Ec + Ep =Eci + Epi ⇔ t=1+ z'2
−2gz0
θ1
∫ dθ
(θ0 , z0 )=(0, 0)(θ1, z1) θ1 > 0 z1 < 0.
Tempo de percurso entre e ao longo da curva
θ0 = 0 θ1
z =z(θ).
P : 0,2p[ [ × ° → ° 3
(θ,z)→ (cosθ,sinθ,z)
Ψ(t) = x(t), y(t), z(t)( )Φ(t) = θ (t), z(t)( ) z θ.

Luso 2006
De forma análoga ao efectuado no plano obtem-se a eq. da energia para o problema da Braquistócrona no cilindro vertical:
Prosseguindo-se chegou-se à seguinte curva como solução:
z ' =± −k2
z−1
θ(s) =k2
2s − sin s( )
z(s) = −k2
21− cos s( )
⎧
⎨⎪⎪
⎩⎪⎪
s ∈ 0, sk[ ]k ∈° \ 0{ }
x =cosk2
2s−sins( )
⎛⎝⎜
⎞⎠⎟
y=sink2
2s−sins( )
⎛⎝⎜
⎞⎠⎟
z=−k2
21−coss( )
⎧
⎨
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
s∈ 0, sk[ ]k∈° \0{ }

Luso 2006
4. Braquistócrona no cilindro horizontal
Analogamente ao problema para o cilindro vertical comece-se por parametrizar o cilindro horizontal.
Considere-se que o corpo que é largado do ponto e chega ao ponto com e
Assuma-se que e proceda-se agora de forma análoga ao efectuado no cilindro vertical.
θ1 > 0 y1 > 0.
P : 0,2p[ [ × ° → ° 3
(θ,y)→ (sinθ,y,cosθ)(θ0 , y0 )=(0, 0)
(θ1, y1)
θ =θ(y)
Ec + Ep =Eci + Epi ⇔ t= 1+θ '2
2g(1−cosθ)0
y1
∫ dy
Tempo de percurso entre e ao longo da curva
y0 =0 y1
θ =θ(y).

Luso 2006
Analogamente obtem-se a eq. da energia para o problema da Braquistócrona no cilindro horizontal:
Utilize-se agora a seguinte mudança de variável:
, i. e.
Nota 3: Quando , logo o ponto de partida verifica-se para
Pelo teorema da função inversa:
Obtem-se que:
θ ' = ±k2
1 − cosθ− 1
1−cosθ =k2
21−coss( )
dθds
=k2
2sinssinθ
dθdy
dyds=dθds
⇔dyds=
dθdsdθdy
s =0 ⇒ θ =0s =0.
dyds=±
1−coss
−1+ coss+4k2

Luso 2006
Realize-se agora a seguinte mudança de variável i. e.
Obtem-se que:
Se
Se
u =coss
dydu
=dyds
dsdu
⇔dydu
=m1
−1+u+4k2
⎛⎝⎜
⎞⎠⎟ 1+u( )
dsdu
=−1
1−u2
k2 =2 :
y(u) =mln(1+ u)+C
k2 ≠2 :
y(u) =mln 2 + k2u+ k u2k2 + 4u−k2 + 4
k2⎛⎝⎜
⎞⎠⎟+C

Luso 2006
Como devemos ter , determina-se a constante , e obtem-se a solução paramétrica.
Se
Se
k2 =2 :θ(s) = arccos 1− 2
21− cos s( )⎛
⎝⎜⎞⎠⎟ = s
y(s) = ± ln1+ cos s
2⎛⎝⎜
⎞⎠⎟
⎧
⎨⎪⎪
⎩⎪⎪
k2 ≠2 :
θ(s) = arccos 1− k2
21− cos s( )
⎛⎝⎜
⎞⎠⎟
y(s) = ± ln2 + k2 cos s + k k2 cos2 s + 4 cos s − k2 + 4
k2 + 2 2k + 2
⎛
⎝⎜
⎞
⎠⎟
⎧
⎨⎪⎪
⎩⎪⎪
s ∈ 0, arccos 1−4k2
⎛⎝⎜
⎞⎠⎟
⎡⎣⎢
⎡⎣⎢
θ 0( ), y 0( )( ) = 0, 0( )C

Luso 2006
Finalmente obteve-se a seguinte curva como solução:Se
Se
k2 =2 :x(s) =sins
y(s)=−ln1+ coss
2⎛⎝⎜
⎞⎠⎟
z(s)=coss
⎧
⎨⎪⎪
⎩⎪⎪
k2 ≠2 :
x(s)=sin arccos 1−k2
21−coss( )
⎛⎝⎜
⎞⎠⎟
⎛⎝⎜
⎞⎠⎟
y(s)=−ln2 + k2 coss+ k k2 cos2 s+ 4 coss−k2 + 4
k2 + 2 2k+ 2
⎛⎝⎜
⎞⎠⎟
z(s)=cos arccos 1−k2
21−coss( )
⎛⎝⎜
⎞⎠⎟
⎛⎝⎜
⎞⎠⎟
⎧
⎨
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
s∈ 0,arccos 1−4k2
⎛⎝⎜
⎞⎠⎟
⎡⎣⎢
⎡⎣⎢
Luso 2006
4.1. Braquistócrona crescente no cilindro horizontal
Se é ou não possível estender a braquistócrona para além de ?
Defina-se o seguinte ramo direito para a Braquistócrona:
k2 < 2
θD (s) = arccos 1−k2
21 − cos s( )
⎛⎝⎜
⎞⎠⎟
yD (s) = −2 ln2 − k2 + k
⎛⎝⎜
⎞⎠⎟
+ ln2 + k2 cos s + k k2 cos2 s + 4 cos s − k2 + 4
k2 + 2 2k + 2
⎛
⎝⎜
⎞
⎠⎟
⎧
⎨⎪⎪
⎩⎪⎪
s =p
s ∈ p,2p[ [

Luso 2006
Nota 4: Mostrámos que a curva paramétrica estendida tem as seguintes propriedades:•Define com função de• satisfaz a eq. da energia• é de classe• •Logo pela nota 1 a eq. de Euler-Lagrange é satisfeita;
Logo conclui-se que a curva ainda é uma extremal do problema da braquistócrona no cilindro horizontal.
θ(y) F −θ '∂Φ∂θ '
=C;
θ y;
C 2;θ '(y) ≠ 0;θ(y)

Luso 2006
Curva paramétrica para :
x(s)=sin arccos 1−k2
21−coss( )
⎛⎝⎜
⎞⎠⎟
⎛⎝⎜
⎞⎠⎟
y(s)=−ln2 + k2 coss+ k k2 cos2 s+ 4 coss−k2 + 4
k2 + 2 2k+ 2
⎛⎝⎜
⎞⎠⎟
z(s)=cos arccos 1−k2
21−coss( )
⎛⎝⎜
⎞⎠⎟
⎛⎝⎜
⎞⎠⎟
⎧
⎨
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
s∈ 0,p[ [
k2 < 2
xD (s)=sin arccos 1−k2
21−coss( )
⎛⎝⎜
⎞⎠⎟
⎛⎝⎜
⎞⎠⎟
yD (s)=−2ln2 −k2 + k
⎛⎝⎜
⎞⎠⎟+ ln
2 + k2 coss+ k k2 cos2 s+ 4 coss−k2 + 4k2 + 2 2k+ 2
⎛⎝⎜
⎞⎠⎟s∈ p,2p[ [
zD (s)=cos arccos 1−k2
21−coss( )
⎛⎝⎜
⎞⎠⎟
⎛⎝⎜
⎞⎠⎟
⎧
⎨
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪

Luso 2006
Bibliografia
•Clegg, J. C., “Calculus of variations”, Oliver & Boyal, 1968.•Davis, F. Soares, “O cálculo variacional clássico e algumas das suas aplicações à física matemática”, EDP - Eletricidade de Portugal, 1986.•Makaremko, G. I. e Kiseliov, A. I., “Calculo Variacional: (Ejemplos y problemas)”, MIR, 1976.•Hector J. Sussmann and Jan C. Willems, “300 Years of Optimal Control: from the Brachystochrone to the Maximum Principle”.