brescia 10 controllo telescopi partei -...
TRANSCRIPT
Lezione n.
Parole chiave:
Corso di Laurea:
Massimo Brescia
Sistemi di Controllo per TelescopiParte I
10
movimentazione telescopi altazimutali, HBS, accoppiamenti meccanici, guida, cupola, motori, filtriCorso di Laurea:
Insegnamento:
Email Docente:
A.A. 2009-2010
Laurea magistrale in Astrofisica e Scienze dello Spazio
Tecnologie Astronomiche

Controllo telescopi Tecnologie Astronomiche M. Brescia
Il sistema di controllo di un telescopio supervisiona:
• sistema di correzione attiva/adattiva degli specchi
• sistema di autoguida del telescopio
• sistema di refrigerazione dei motori e climatizzazione della cupola
• sistema idrostatico degli assi principali
• sistema di movimentazione della cupola
• sistema di movimentazione degli assi

• Progetto edificio completo

• telescopio
disegno 3D globale

• top ring
• spiders
• M2 box
• serrurier (tube assembly)
• baffles

• Forcelle laterali
• Altitude axis (Nasmyth focus entrance)
• Altitude motorssupports

• Center Piece
• Altitude axis (Nasmyth focus entrance)

• M1 Box
• M1 Cell
• Cassegrainfocus entrance
• M1 activesupport

• quadri elettronici dicontrollo
• baseplate • pattini idrostatici
•pilastro

Sistema di idrostatica - HBS Tecnologie Astronomiche M. Brescia
Il sistema idrostatico consiste in un circuito idraulico in cui olio speciale viene iniettato negliingranaggi di un asse (AZ/ALT) per minimizzare l’attrito dinamico durante il moto. Svolgequindi il ruolo di un cuscinetto idraulico su cui l’asse è sospeso, garantendo la perfetta linearità dirotazione ed evitando lo strisciamento di parti meccaniche a fronte di possibili difetti costruttivie/o deformazioni indotte da gradienti termici/gravitazionali.
HBS = Hydrostatic Bearing System

AZ – accoppiamento meccanico - 1 Tecnologie Astronomiche M. Brescia
sul pilastro si posizionano ifixatorenbau, martinettimeccanici con vite senza fine, su cui si colloca ilbaseplate, che deve essere livellato al micron rispettoal piano (messa in stazione azimutale). La superficiesuperiore del baseplate è in sostanza la vasca checonterrà i pads idrostatici e l’olio (circuito chiuso condrenaggio per il ricircolo e ripompaggio nei padsdell’olio).

AZ – accoppiamento meccanico - 2 Tecnologie Astronomiche M. Brescia
montaggio AZ box e cuscinettocentrale sul baseplate, su cui sitrova il sistema di pattiniidrostatici. Il cuscinetto servecome vincolo assiale per larotazione concentrica.
Dimensionamento HBS Tecnologie Astronomiche M. Brescia
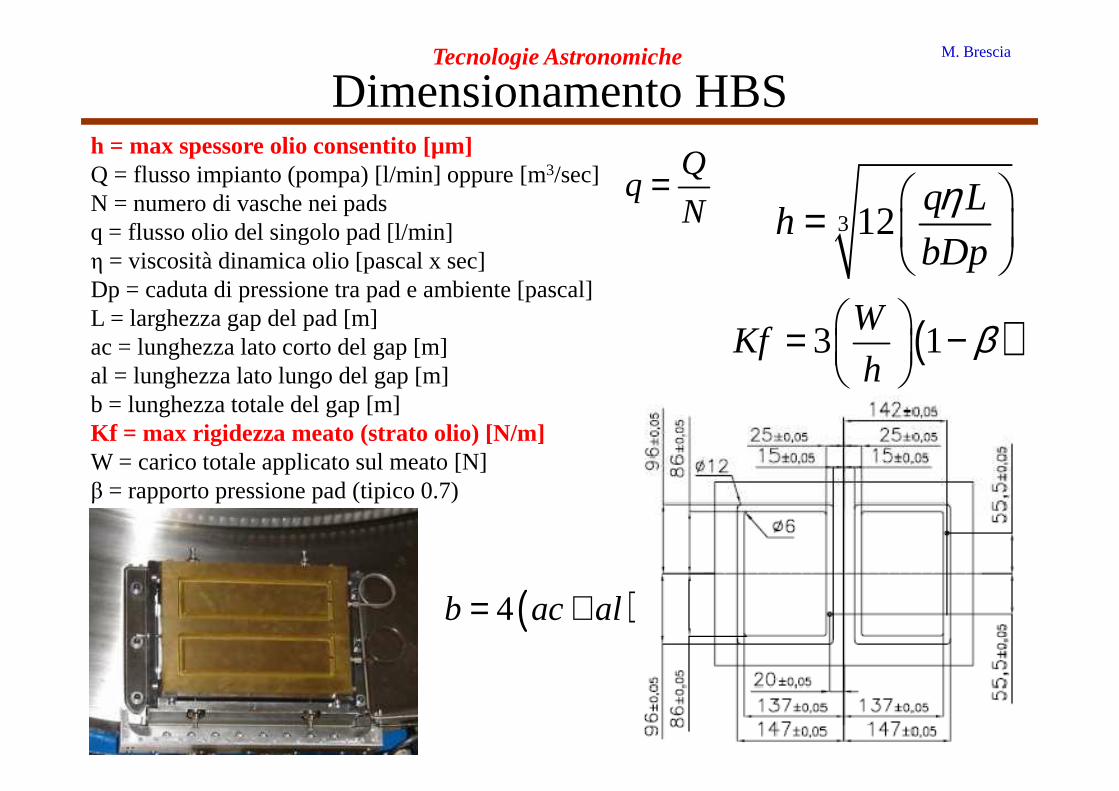
h = max spessore olio consentito [µm]Q = flusso impianto (pompa) [l/min] oppure [m3/sec]N = numero di vasche nei padsq = flusso olio del singolo pad [l/min]η = viscosità dinamica olio [pascal x sec]Dp = caduta di pressione tra pad e ambiente [pascal]L = larghezza gap del pad [m]ac = lunghezza lato corto del gap [m]al = lunghezza lato lungo del gap [m]b = lunghezzatotaledelgap[m]
N=
3 12q L
hbDp
η =
( )3 1W
Kfh
β = −
b = lunghezzatotaledelgap[m]Kf = max rigidezza meato (strato olio) [N/m]W = carico totale applicato sul meato [N]β = rapporto pressione pad (tipico 0.7)
( )4b ac al= +

Esempio: VST AZ HBS Tecnologie Astronomiche M. Brescia
h = max spessore olio consentito [µm] = 70.93N = numero di vasche nei pads = 24η = viscosità dinamica olio [pascal/sec] = 0.125Dp = caduta di pressione pad/ambiente = 1200 KPaL = larghezza gap del pad [m] = 0.01b = lunghezza totale del gap [m] = 1.216Kf = max rigidezza meato (strato) [N/m] = 5E9W = carico totale applicato sul meato [N] = 600000β = rapporto pressione pad = 0.8
2 pompe mandata1 pompa ricircolo

Installazione e verifica pads Tecnologie Astronomiche M. Brescia

Controllo HBS Tecnologie Astronomiche M. Brescia
particolari del sistema SWdi controllo dell’HBS nel VST• Controllo pressione pompe(mandata/ritorno)• Controllo pressione pads• Controllo temperatura olio nellavasca di ricircolo rispettoall’ambiente esterno (importante pergarantire la necessaria viscositàdinamica)

Test HBS –1 Tecnologie Astronomiche M. Brescia
dopo aver applicato tutto il carico (telescopiocompleto), si procede al raffreddamento dell’olio conmonitoraggio ed alle misure di spessore meato(livellamento pressioni pads) con aggiustamentomicrometrico dell’altezza dei pads (agendo sui martinetti(fixatorenbau) che livellano l’altezza del baseplate rispettoal pilastro).

Test HBS – 2 Tecnologie Astronomiche M. Brescia
0
5
10
15
1 2 3 4 5 6 7 8 9 10 11 12
bar
pad
HBS oil film thickness leveling (AZ box reference)
ref1 @arm with locking pin
ref2@ opposite to ALT inclination
ref3@ arm with manual drive
ref4@ ALT inclination side
distribuzione pressioni sui padsprimadell’aggiustamento del baseplate. Misurecon 4 micrometri posizionati a 90 gradi didistanza
0
5
10
15
1 2 3 4 5 6 7 8 9 10 11 12
HBS oil film thickness leveling (AZ box reference)
ref1
ref2
ref3
ref4
distribuzione pressioni sui padsdopol’aggiustamento del baseplate
Test HBS – 3 Tecnologie Astronomiche M. Brescia
0
20
40
60
80
0 20 40 60 80 100120140160180200220240260280300320340360
mic
ron
deg
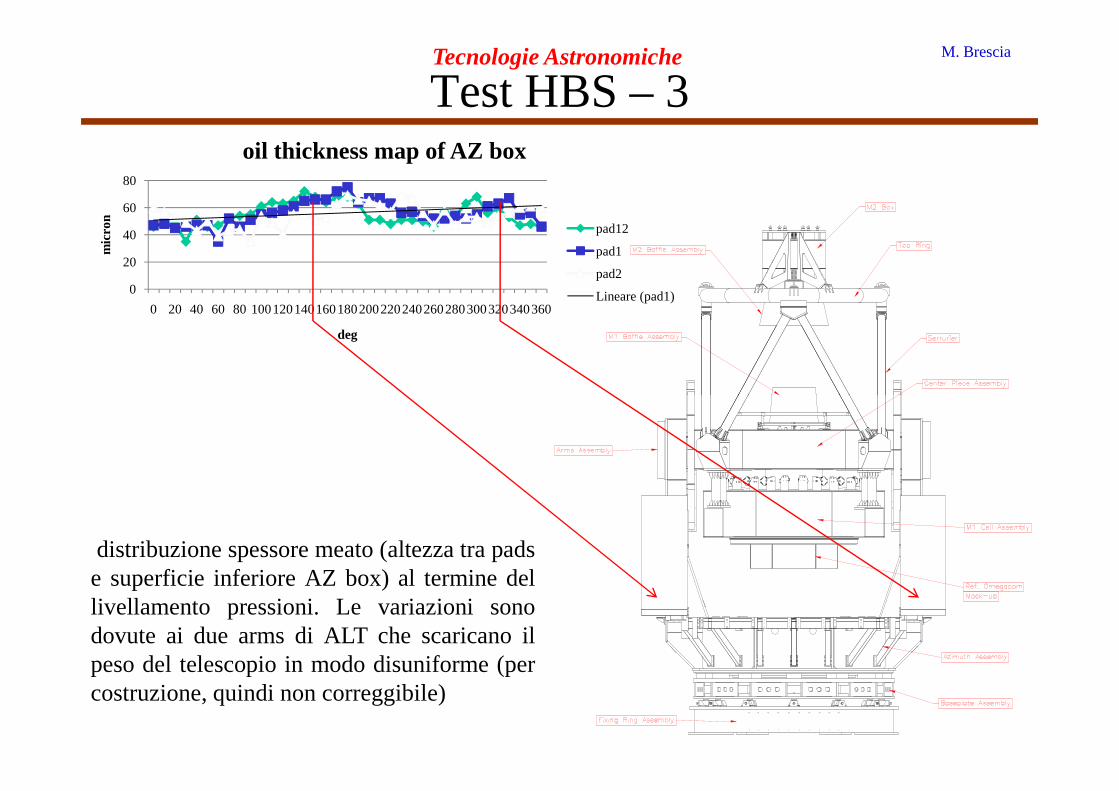
oil thickness map of AZ box
pad12
pad1
pad2
Lineare (pad1)
distribuzione spessore meato (altezza tra padse superficie inferiore AZ box) al termine dellivellamento pressioni. Le variazioni sonodovute ai due arms di ALT che scaricano ilpeso del telescopio in modo disuniforme (percostruzione, quindi non correggibile)

Rotazione telescopio - cupola Tecnologie Astronomiche M. Brescia
Per proteggere il più possibile il telescopio dal vento e da contaminazione luminosa durantel’esposizione, l’apertura della cupola è minima. Ciò implica che deve ruotare sincronizzata con iltelescopio per mantenere il perfetto campo visivo del telescopio. Inoltrela presenza di cavielettrici tra i cabinets e la struttura implica la necessità di ruotare entrambi per evitare danni.Ovviamente è sempre la cupola che deve “seguire” il telescopio (mai il contrario!).Dunque telescopio e cupola sono linkati tra loro per mezzo di un “bridge” meccanico, dotato disensori di movimento, in grado di “avvertire” la rotazione del telescopio e di “rispondere”muovendo l’edificio con velocità proporzionale, mantenendo i due assi perfettamente allineatidurante la rotazione entro un errore max di +/- 2.5 deg.

Accoppiamento telescopio - cupola Tecnologie Astronomiche M. Brescia
Dome floor
Vediamo Video VST+VLT
AZtelescope
max displacemente betweenAZ & Dome angular positions
max ± 2.5°
bridgebumpers
Guida del telescopio - 1 Tecnologie Astronomiche M. Brescia
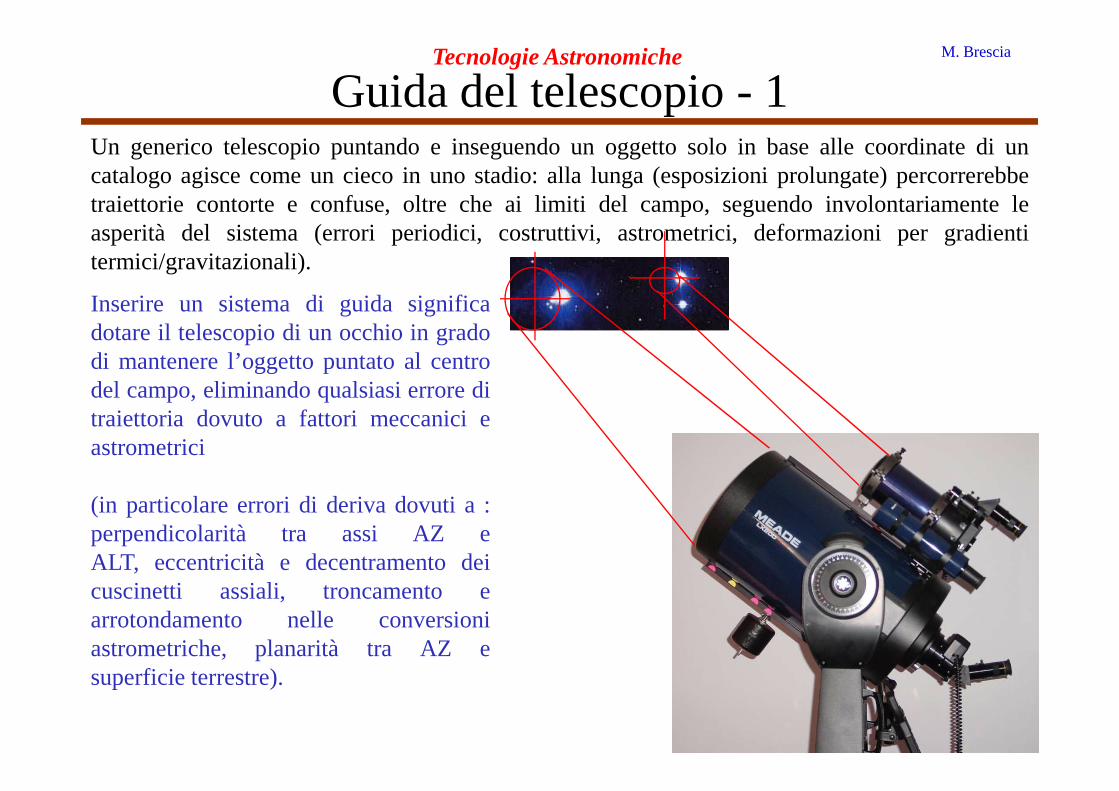
Un generico telescopio puntando e inseguendo un oggetto solo in base alle coordinatedi uncatalogo agisce come un cieco in uno stadio: alla lunga (esposizioni prolungate)percorrerebbetraiettorie contorte e confuse, oltre che ai limiti del campo, seguendo involontariamente leasperità del sistema (errori periodici, costruttivi, astrometrici, deformazioni per gradientitermici/gravitazionali).
Inserire un sistema di guida significadotare il telescopio di un occhio in gradodi mantenere l’oggetto puntato al centrodel campo,eliminandoqualsiasierroredidel campo,eliminandoqualsiasierroreditraiettoria dovuto a fattori meccanici eastrometrici
(in particolare errori di deriva dovuti a :perpendicolarità tra assi AZ eALT, eccentricità e decentramento deicuscinetti assiali, troncamento earrotondamento nelle conversioniastrometriche, planarità tra AZ esuperficie terrestre).

Guida del telescopio - 2 Tecnologie Astronomiche M. Brescia
In pratica si usa un detector dedicato (technical CCD) che punti un oggetto diverso da quellotarget, molto brillante, localizzato in una corona circolare prefissata e centrata sull’oggetto target.Il decentramento dei due oggetti è ovviamente collegato. Il CCD di guida è anche utilizzato nel“pointing model”, tecnica di puntamento multiplo di oggetti, applicata periodicamente nella vitadi un telescopio, per definiree aggiornare gli “offset”posizionali di puntamento(inseriti nel softwareastrometrico), dovuti all’usurameccanicadellostrumento.meccanicadellostrumento.

Controllo Autoguida – Control SW Panel Tecnologie Astronomiche M. Brescia

Controllo Autoguida - 2 Tecnologie Astronomiche M. Brescia
Seleziono la stella
Acquisisco le immagini (e quindi ne calcolo lo spostamento)
Seleziono la stella
Sposto il probe

Derotazione di campo Tecnologie Astronomiche M. Brescia
L’asse di derotazione di campo (derotatore) non esiste nelle montature equatoriali (in cui l’asse diascensione retta è allineato con l’asse polare terrestre), ma deve essere controllato nellemontature altazimutali, in cui il detector deve ruotare nella direzione opposta a quella indottadalla rotazione terrestre, che provoca il capovolgimento dell’immagine. In unalunga posaappariranno strisciate tanto maggiori quanto più sono distanti dal centro del campo inquadratoTuttavia, le tolleranze in termini di errore RMS di posizionamento sono molto maggiori rispettoall’errore RMS di tracking degli assi principali.

VST ROT preliminary testMarch 2006
Rotator axis position tracking error. RMS Error = 0.35 arcsecThe ROT performances can be relaxed in respect of AZ - ALT cases.For example: 1 arcsec RMS Error => 0.843 µm on CCD (being 15 µm of pixel size, the error corresponds to much less of 1 pixel; i.e. the spot remains still inside the pixel)
M. Brescia

Controllo assi principali - 1 Tecnologie Astronomiche M. Brescia
Le operazioni primarie di un telescopio sono pointing e tracking. La principale differenza tra ledue è il range di velocità che implica bande di autofrequenza del sistema molto differenti:Velocità tipiche nei grandi telescopi altazimutali sono:
POINTINGAZ = 1.5 deg/secALT = 1 deg/sec
TRACKINGAZ = dipendentedaALT (mediamentedadecineacentinaiadi arcsec/sec)AZ = dipendentedaALT (mediamentedadecineacentinaiadi arcsec/sec)ALT = max fino a qualche decina di arcsec/sec
Le principali analogie sono:
Precisione di posizionamento (entro 0.15 arcsec nel pointing; entro 0.05 arcsec nel tracking);Fluidità di movimento;Medesimi sistemi di feedback e di controllo velocità e posizione;
Problema: controllo prestazioni nel salto repentino tra pointing e tracking

Controllo assi principali - 2 Tecnologie Astronomiche M. Brescia
Nel passaggio da pointing a tracking il problema da controllare è lasovraelongazione. Taledifetto consiste nell’oscillazione intorno alla posizione teorica dovuta al cambio repentino divelocità in prossimità della posizione astrometrica dell’oggetto.Può durare anche minuti, durante i quali non è possibile aprire l’otturatore (downtimeosservativo). La legge per eliminare tale fenomeno è la seguente:
bSpeedcommand K poserr=
before tuning after tuning
Circa gli assi, ALT è più sensibile di AZ a sorgenti esterne di noise, quali vibrazioni indotte dalvento (invariante per AZ) o delle struttura verticale del telescopio (frequenze proprie) dovute almaggiore braccio (dislocazione e distribuzione delle masse lungo la focale del telescopio).L’errore totale di tracking per i 2 assi principali è dato da:
( )( )2 2cosRMS tracking AZ ALTe e ALT e− = +

VST AZ preliminary testMarch 2007 (Italy) & March 2008 (Paranal)
Azimuth axis position tracking error (ALT > 85°, v=67 arcsec/s). RMS Error = 0.028 arcsec. The real effect on the sky image would be lower because of the cos(ALT) factor
AZ Velocity [arcsec/sec]
POS RMS error [arcsec]
Foreseen Alt angle range [deg]
RMS Error on sky[arcsec]
0 0.013 30-40 <0.011
10 0.016 40-60 <0.012
20 0.029 60-70 <0.014
40 0.056 60-70 <0.028
80 0.073 70-80 <0.025
120 0.089 80-90 <0.015
160 0.111 80-90 <0.018
M. Brescia
Italia
Paranal

VST ALT preliminary testMarch 2006
Factory Machines ON Factory Machines OFF
Noise Sources in the integration site• hydraulic drainage pumps under telescope• metal working machines• air compressing pumps• overhead crane• wind buffeting
M. Brescia
AZ in position control ( speed 0 arcsec/s, RMS error 0.01 arcsec), ALT in position control (speed 0 arcsec/s, RMS error 0.07 arcsec)
ALT speed Power spectrum

VST ALT preliminary testMarch 2007
Altitude axis position tracking error (v=13 arcsec/s). RMS Error = 0.068 arcsec
M. Brescia

Servo-ControlloTecnologie Astronomiche M. Brescia
Peculiarità di un servo sistemaUn servo-meccanismo è sempre attuatoda un errore, differenza tra un outputteorico ed uno reale;Un servo sistema deve sempre avere unamplificatore di potenza (la potenzaerogata in output dal servo è maggiore diquella fornita in input);La potenza applicata ad un carico èLa potenza applicata ad un carico èproporzionale alla combinazione delsegnale errore, della sua derivata e delsuo integrale;Nella pratica reale, un servo meccanismoben tarato è stabile;