cansat 2019 post flight review (pfr) outlinecansat 2019 pfr: team 6160 | grizu-263 6 cansat overview...
TRANSCRIPT
Team Logo
Here
(If You Want)
Team Logo
Here
CanSat 2019 PFR: Team 6160 | grizu-263 1
CanSat 2019
Post Flight Review (PFR) Outline
Version 1.1
Team # 6160
grizu-263
Team Logo
Here
(If You Want)
Team Logo
Here
CanSat 2019 PFR: Team 6160 | grizu-263 2
Presentation Outline
Presenter: Senanur SAMUR
Contest Presenter
Introduction Senanur SAMUR
System Overview Senanur SAMUR
Concept of Operations and Sequence of
Events
Senanur SAMUR
Flight Data Analysis Sedef ÖZEL
Failure Analysis Sedef ÖZEL
Lessons Learned Sedef ÖZEL
Conclusions Sedef ÖZEL
Team Logo
Here
(If You Want)
Team Logo
Here
CanSat 2019 PFR: Team 6160 | grizu-263 3
Introduction
Senanur SAMUR
Team Logo
Here
(If You Want)
Team Logo
Here
CanSat 2019 PFR: Team 6160 | grizu-263 4
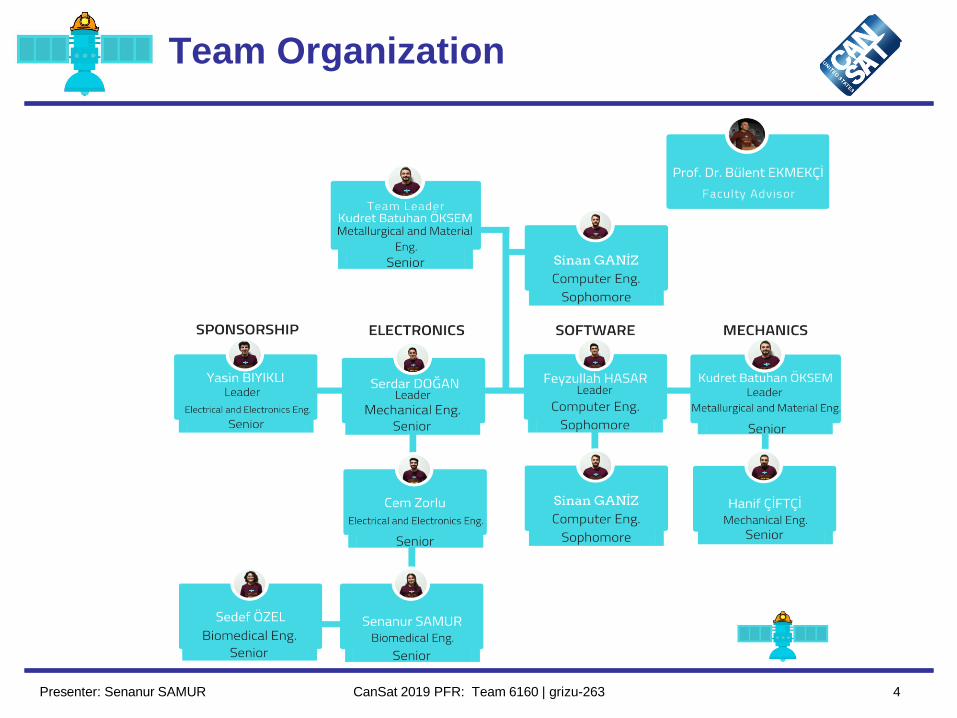
Team Organization
Presenter: Senanur SAMUR
Team Logo
Here
(If You Want)
Team Logo
Here
CanSat 2019 PFR: Team 6160 | grizu-263 5
Systems Overview
Senanur SAMUR
Team Logo
Here
(If You Want)
Team Logo
Here
CanSat 2019 PFR: Team 6160 | grizu-263 6
CanSat Overview (1 of 3)
Presenter: Senanur SAMUR
Mission
CanSat is an auto-gyro controlled container that protects the electronic part and protects the
payload.
Mission Objectives
• CanSat consists of 2 parts: payload and container.
• Container protects the payload that will perform the desired mission.
• The launched CanSat will leave the rocket at an altitude of 670 to 725 m.
• CanSat will go down to 450 m with a speed of 20 m/s via the parachute .
• The container will be separated from the auto-gyro controlled payload after 450 m.
• The container will descent via parachute after separation.
• Auto-gyro's descent speed will be 10 to 15 m/s.
• The auto-gyro rotates passively during descent.
• When going under the control of payload auto-gyro, the payload will transmit telemetry,
which will include air pressure, outside temperature, battery voltage, GPS position, pitch
and roll, auto-gyro blade spin rate.
• After the landing, the payload will be stopped telemetry transmission and starts to give
warning sound and light.
Team Logo
Here
(If You Want)
Team Logo
Here
CanSat 2019 PFR: Team 6160 | grizu-263 7
CanSat Overview (2 of 3)
Presenter: Senanur SAMUR
Bonus Objective
• The camera will be integrated into the payload. After released payload from the container (450
meters), the camera will start to record video.
• The camera shall point downward 45 degrees from nadir. It shall be spin stabilized and point in
one direction relative to the earth’s magnetic field with stability of +/- 10 degrees.
• The video camera resolution will be at least 640x480 pixels and will be colored to 30 frames per
second.
External Objective
• Our goal is to be among the top three in CanSat 2019.
• We have gained an acceptable experience with CanSat Competition and started a new national
project to design and produce Turkey's first PocketQube satellite.
• PocketQube will be dimensions of the 5x5x5 cm.
• It will be placed in orbit at an altitude of about 500 km.
• PocketQube and CanSat internet address:
– https://x.grizu-263.space/
– https://grizu-263.space/cansat/
Team Logo
Here
(If You Want)
Team Logo
Here
CanSat 2019 PFR: Team 6160 | grizu-263 8
CanSat Overview (3 of 3)
Presenter: Senanur SAMUR
Mechanic
• Total CanSat weight is 496 grams. The weight requirement successfully
was provided.
• There is no damage on the container end of the launch. However we
couldn’t find our payload.
Separation
• First separation; the CanSat separated from the rocket at an altitude 690 m.
• Second separation; the payload separated from the container at an altitude
461 m.
Data Transfer
• Total flight time of CanSat is 1 min 24 sec .(From rocket launch to reaching
to ground again). While this time, 69 data packet reach to the ground
station.
GCS interface
• 69 data packet plotted in real-time and saved to the .csv file.
Team Logo
Here
(If You Want)
Team Logo
Here
CanSat 2019 PFR: Team 6160 | grizu-263 9
Payload Design Description (1 of 6)
Presenter: Senanur SAMUR
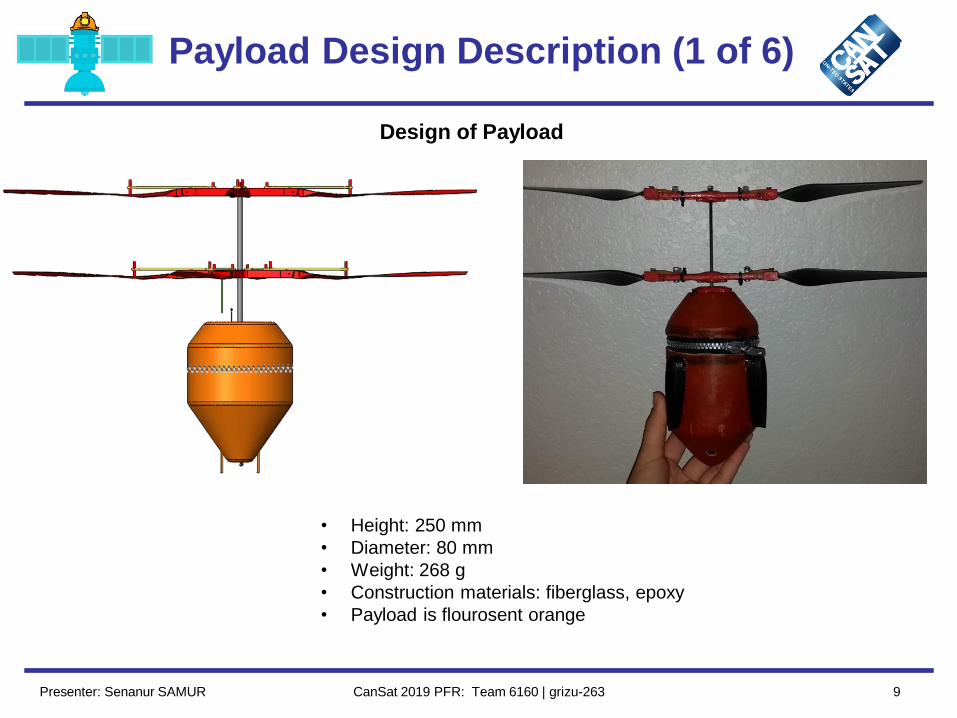
Design of Payload
• Height: 250 mm
• Diameter: 80 mm
• Weight: 268 g
• Construction materials: fiberglass, epoxy
• Payload is flourosent orange
Team Logo
Here
(If You Want)
Team Logo
Here
CanSat 2019 PFR: Team 6160 | grizu-263 10
Payload Design Description (2 of 6)
Presenter: Senanur SAMUR
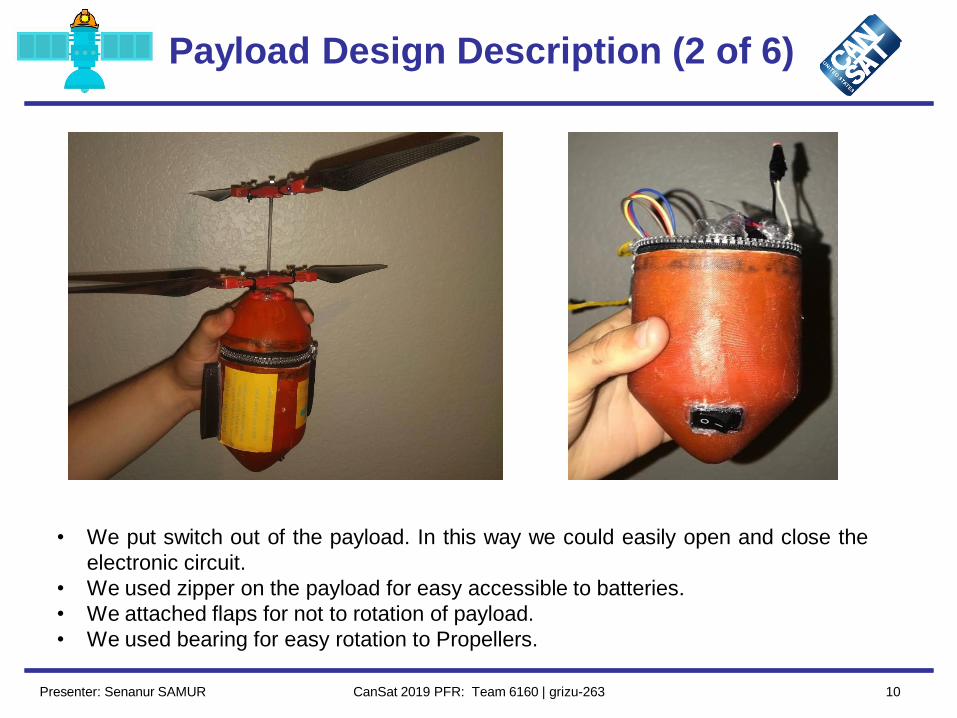
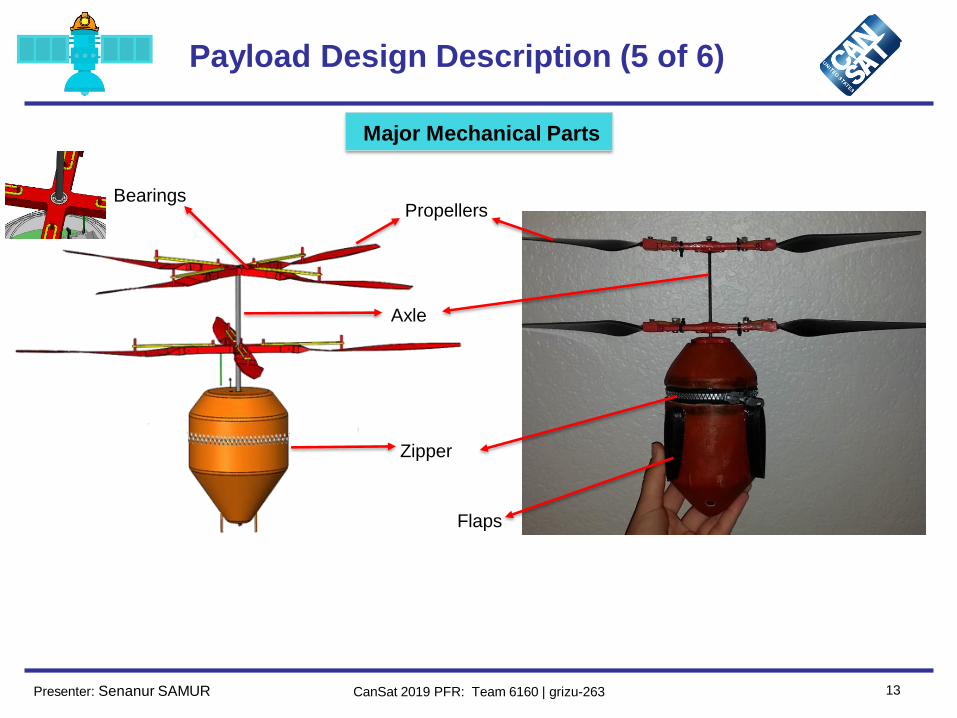
• We put switch out of the payload. In this way we could easily open and close the
electronic circuit.
• We used zipper on the payload for easy accessible to batteries.
• We attached flaps for not to rotation of payload.
• We used bearing for easy rotation to Propellers.
Team Logo
Here
(If You Want)
Presenter: Senanur SAMUR
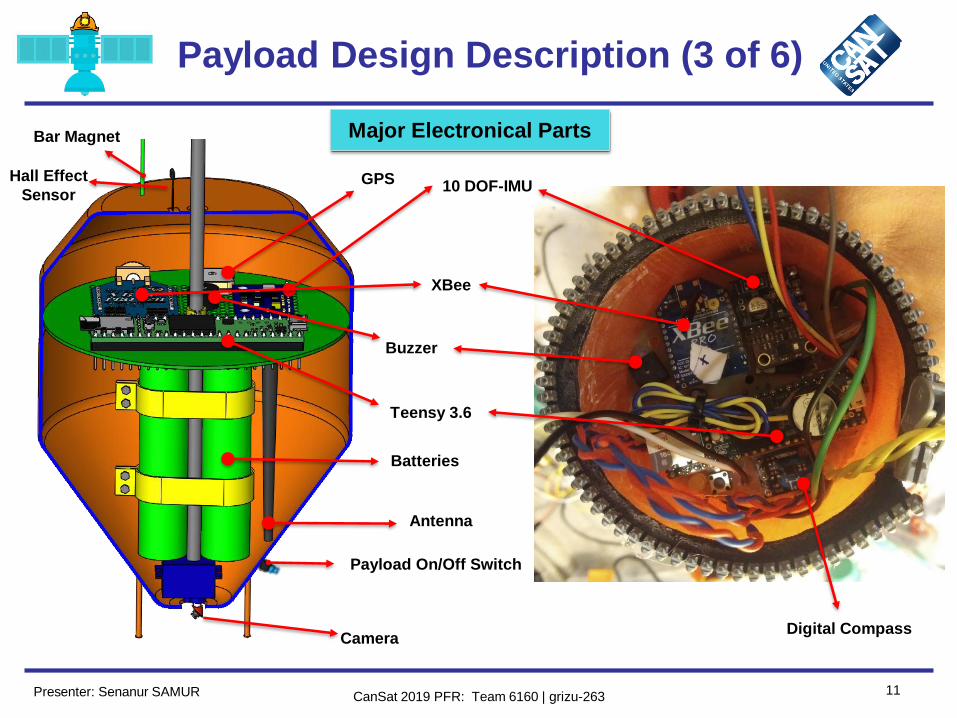
10 DOF-IMU
Teensy 3.6
Batteries
GPSHall Effect
Sensor
Camera
Payload On/Off Switch
CanSat 2019 PFR: Team 6160 | grizu-26311
Payload Design Description (3 of 6)
XBee
Antenna
Bar Magnet
Buzzer
Major Electronical Parts
Digital Compass
Team Logo
Here
(If You Want)
Team Logo
Here
CanSat 2019 PFR: Team 6160 | grizu-263 12
Payload Design Description (4 of 6)
Presenter: Senanur SAMUR
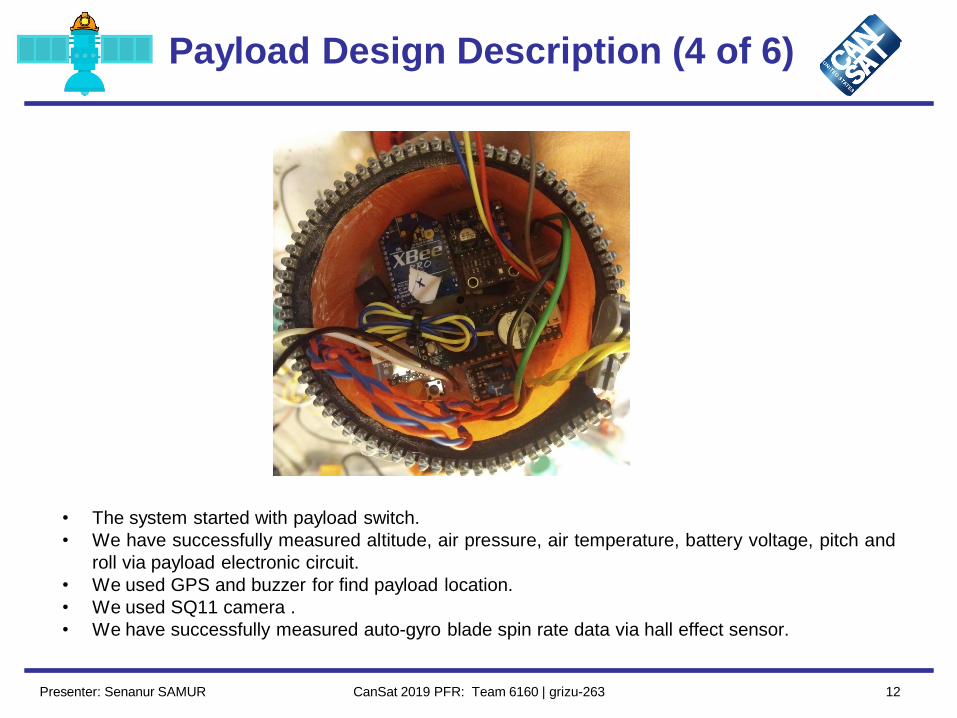
• The system started with payload switch.
• We have successfully measured altitude, air pressure, air temperature, battery voltage, pitch and
roll via payload electronic circuit.
• We used GPS and buzzer for find payload location.
• We used SQ11 camera .
• We have successfully measured auto-gyro blade spin rate data via hall effect sensor.
Team Logo
Here
(If You Want) Payload Design Description (5 of 6)
13CanSat 2019 PFR: Team 6160 | grizu-263Presenter: Senanur SAMUR
Major Mechanical Parts
PropellersBearings
Zipper
Axle
Flaps
Team Logo
Here
(If You Want) Payload Design Description (6 of 6)
14CanSat 2019 PFR: Team 6160 | grizu-263Presenter: Senanur SAMUR
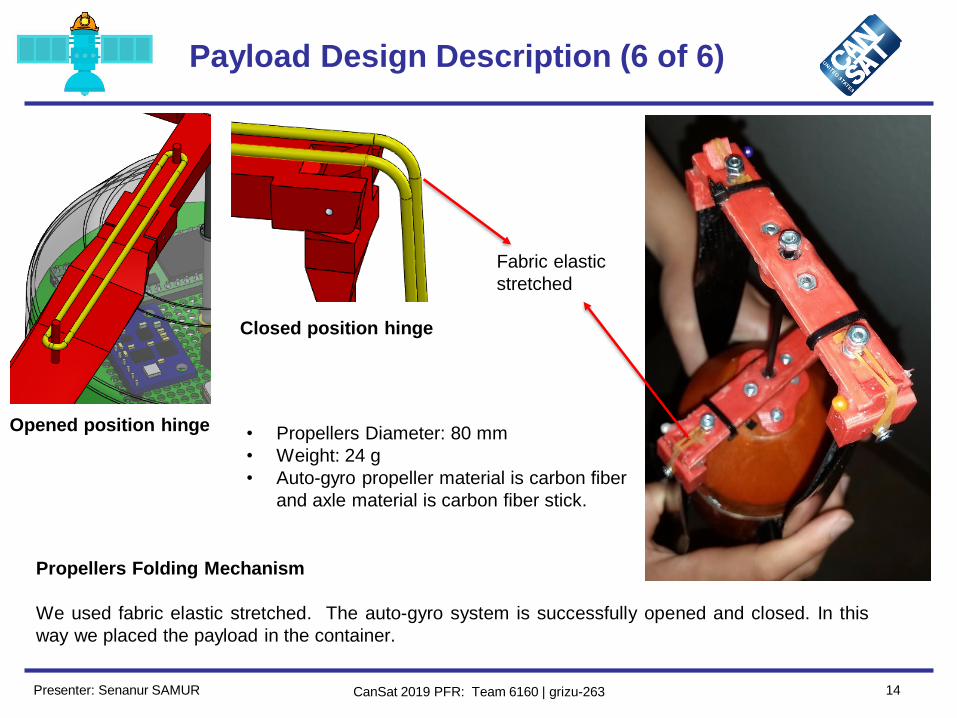
• Propellers Diameter: 80 mm
• Weight: 24 g
• Auto-gyro propeller material is carbon fiber
and axle material is carbon fiber stick.
Propellers Folding Mechanism
We used fabric elastic stretched. The auto-gyro system is successfully opened and closed. In this
way we placed the payload in the container.
Fabric elastic
stretched
Closed position hinge
Opened position hinge
Team Logo
Here
(If You Want)
Team Logo
Here
CanSat 2019 PFR: Team 6160 | grizu-263 15
Container Design Description (1 of 5)
Presenter: Senanur SAMUR
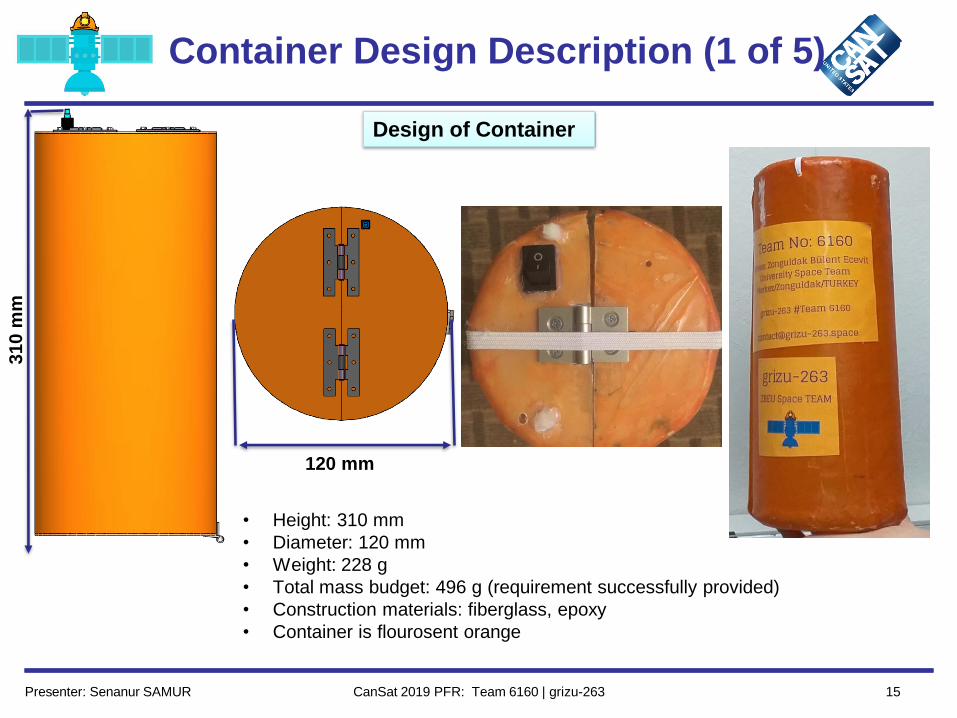
Design of Container
• Height: 310 mm
• Diameter: 120 mm
• Weight: 228 g
• Total mass budget: 496 g (requirement successfully provided)
• Construction materials: fiberglass, epoxy
• Container is flourosent orange
120 mm
310 m
m
Team Logo
Here
(If You Want)
Team Logo
Here
CanSat 2019 PFR: Team 6160 | grizu-263 16
Container Design Description (2 of 5)
Presenter: Senanur SAMUR
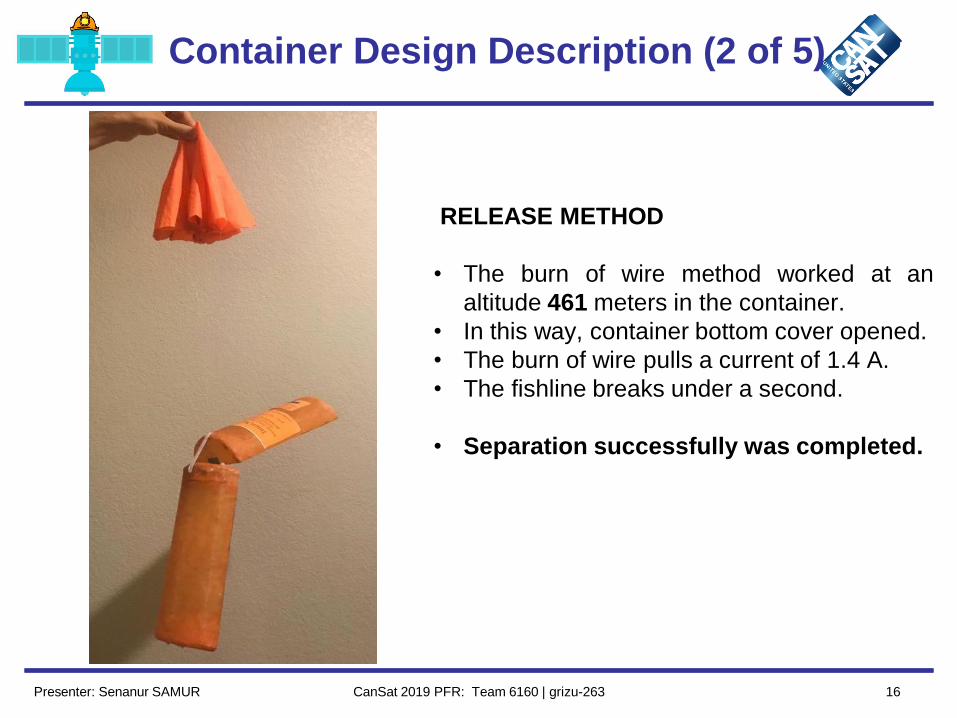
RELEASE METHOD
• The burn of wire method worked at an
altitude 461 meters in the container.
• In this way, container bottom cover opened.
• The burn of wire pulls a current of 1.4 A.
• The fishline breaks under a second.
• Separation successfully was completed.
Team Logo
Here
(If You Want)
Team Logo
Here
CanSat 2019 PFR: Team 6160 | grizu-263 17
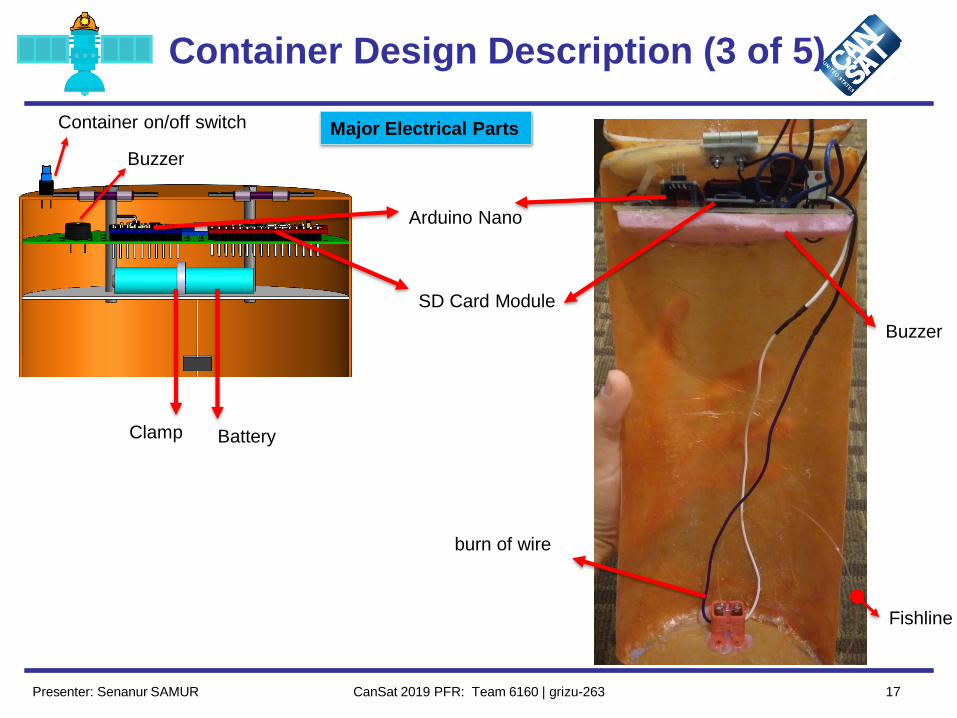
Container Design Description (3 of 5)
Presenter: Senanur SAMUR
Clamp
Container on/off switch
SD Card Module
Major Electrical Parts
Arduino Nano
Buzzer
Buzzer
Battery
Fishline
burn of wire
Team Logo
Here
(If You Want)
Team Logo
Here
CanSat 2019 PFR: Team 6160 | grizu-263 18
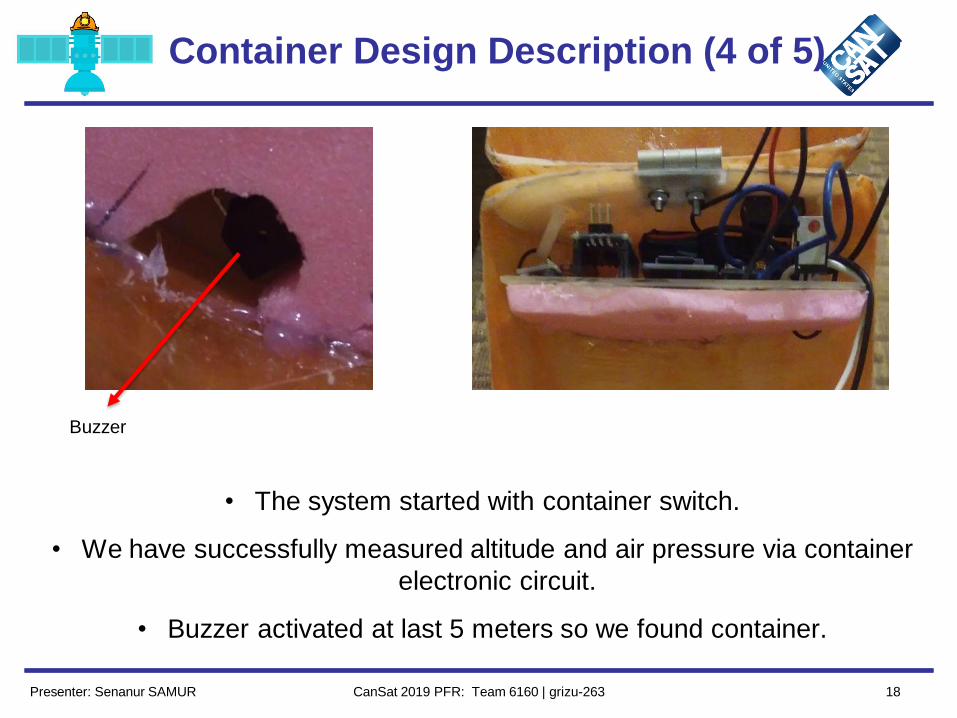
Container Design Description (4 of 5)
Presenter: Senanur SAMUR
• The system started with container switch.
• We have successfully measured altitude and air pressure via container
electronic circuit.
• Buzzer activated at last 5 meters so we found container.
Buzzer
Team Logo
Here
(If You Want)
Team Logo
Here
CanSat 2019 PFR: Team 6160 | grizu-263 19
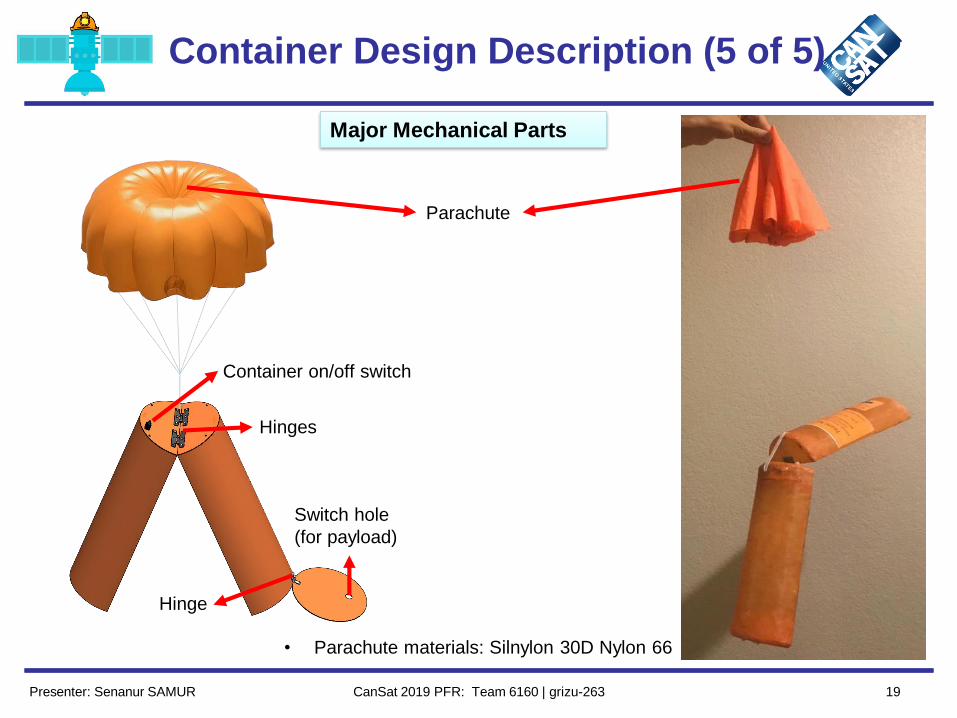
Container Design Description (5 of 5)
Presenter: Senanur SAMUR
Parachute
Hinges
Container on/off switch
Hinge
Switch hole
(for payload)
Major Mechanical Parts
• Parachute materials: Silnylon 30D Nylon 66
Team Logo
Here
(If You Want)
Team Logo
Here
CanSat 2019 PFR: Team 6160 | grizu-263 20
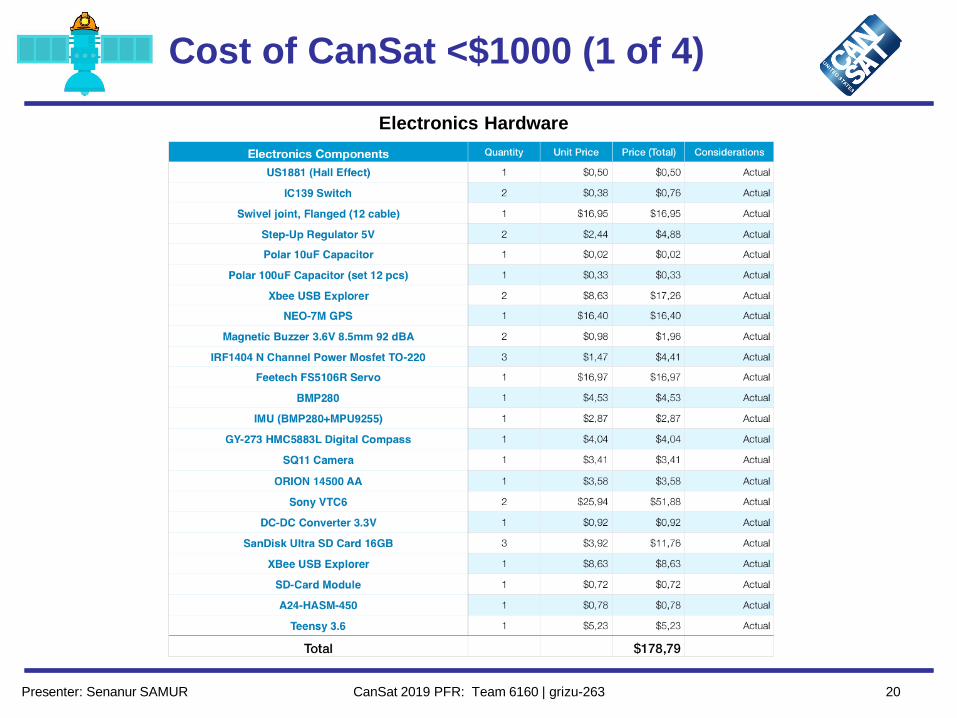
Cost of CanSat <$1000 (1 of 4)
Presenter: Senanur SAMUR
Electronics Hardware
Team Logo
Here
(If You Want)
Team Logo
Here
CanSat 2019 PFR: Team 6160 | grizu-263 21
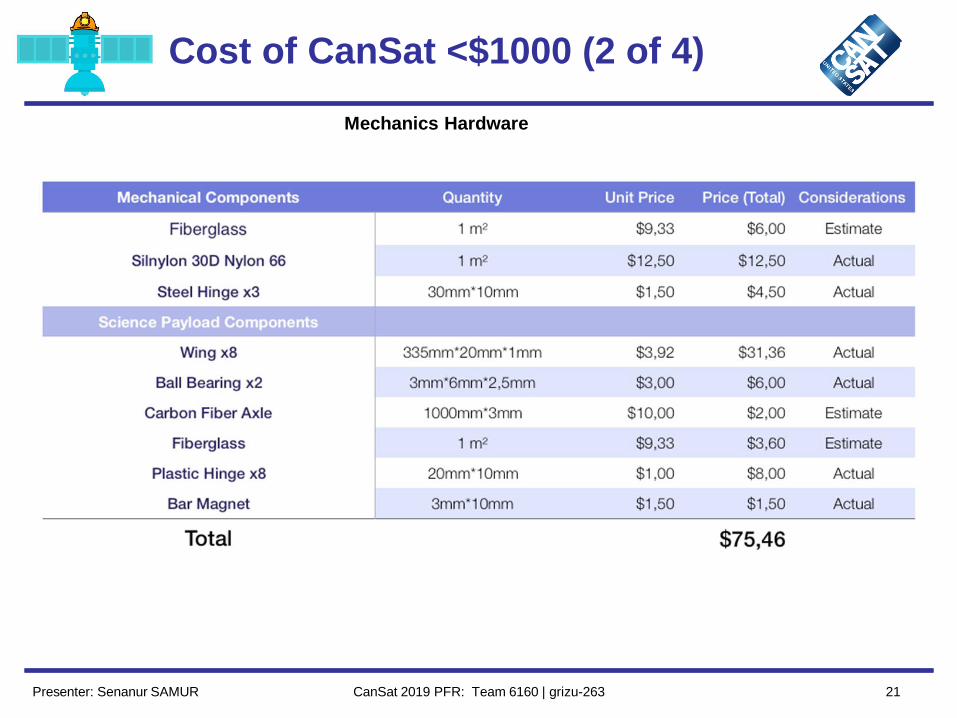
Cost of CanSat <$1000 (2 of 4)
Presenter: Senanur SAMUR
Mechanics Hardware
Team Logo
Here
(If You Want)
Team Logo
Here
CanSat 2019 PFR: Team 6160 | grizu-263 22
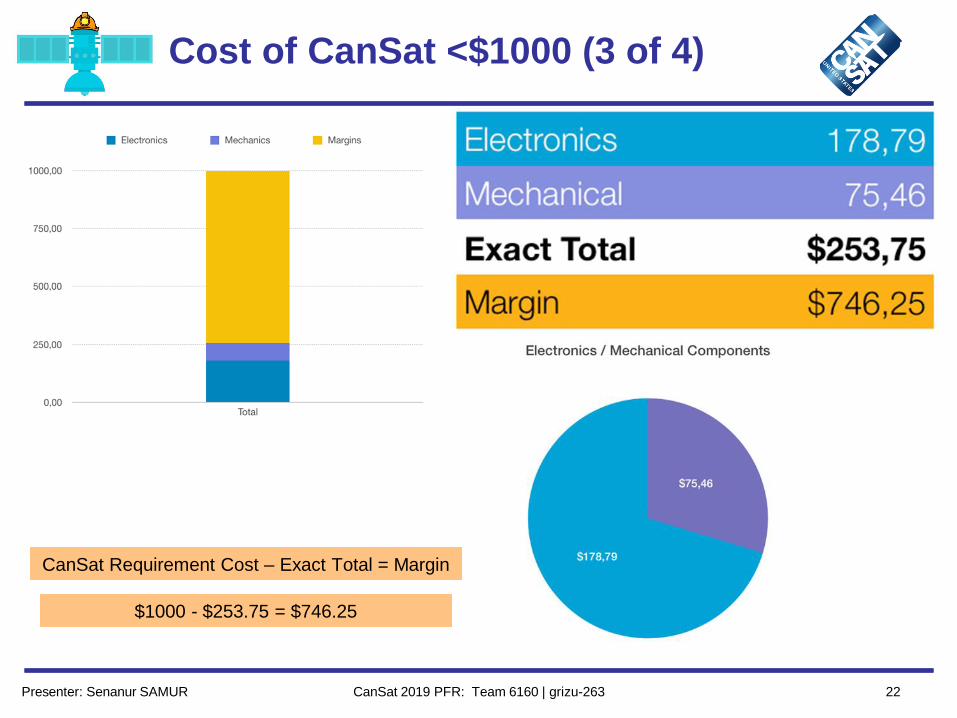
Cost of CanSat <$1000 (3 of 4)
Presenter: Senanur SAMUR
CanSat Requirement Cost – Exact Total = Margin
$1000 - $253.75 = $746.25
Team Logo
Here
(If You Want)
CanSat 2019 PFR: Team 6160 | grizu-263 23
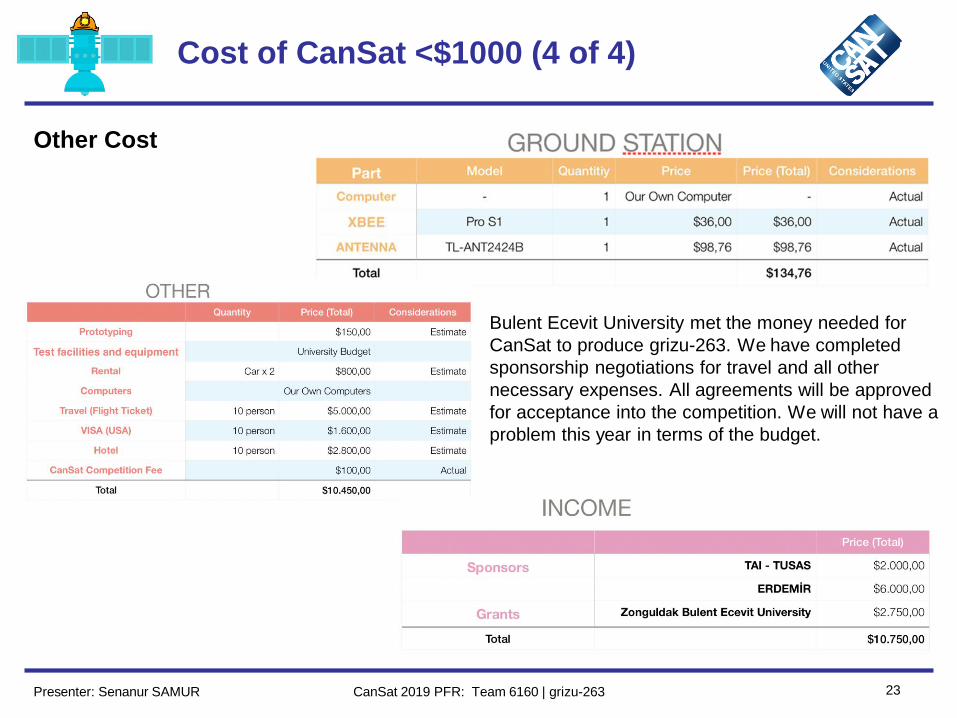
Cost of CanSat <$1000 (4 of 4)
Presenter: Senanur SAMUR
Bulent Ecevit University met the money needed for
CanSat to produce grizu-263. We have completed
sponsorship negotiations for travel and all other
necessary expenses. All agreements will be approved
for acceptance into the competition. We will not have a
problem this year in terms of the budget.
Other Cost
Team Logo
Here
(If You Want)
Team Logo
Here
CanSat 2019 PFR: Team 6160 | grizu-263 24
Concept of Operations and Sequence
of Events
Senanur SAMUR
Team Logo
Here
(If You Want)
Team Logo
Here
CanSat 2019 PFR: Team 6160 | grizu-263 25
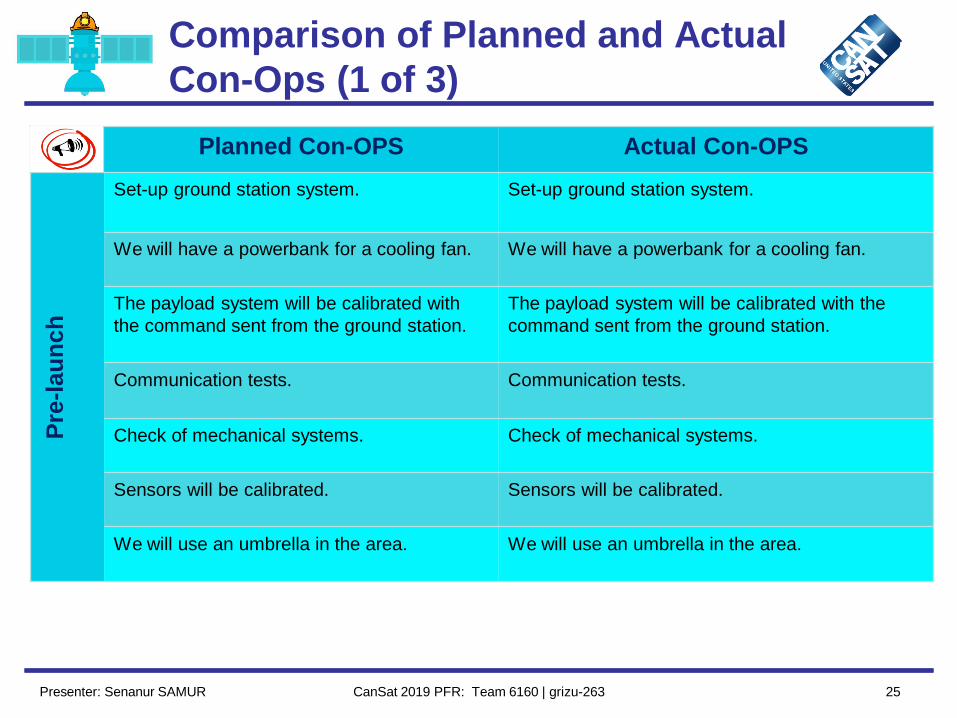
Comparison of Planned and Actual
Con-Ops (1 of 3)
Presenter: Senanur SAMUR
Planned Con-OPS Actual Con-OPS
Pre
-la
un
ch
Set-up ground station system. Set-up ground station system.
We will have a powerbank for a cooling fan. We will have a powerbank for a cooling fan.
The payload system will be calibrated with
the command sent from the ground station.
The payload system will be calibrated with the
command sent from the ground station.
Communication tests. Communication tests.
Check of mechanical systems. Check of mechanical systems.
Sensors will be calibrated. Sensors will be calibrated.
We will use an umbrella in the area. We will use an umbrella in the area.
Team Logo
Here
(If You Want)
Team Logo
Here
CanSat 2019 PFR: Team 6160 | grizu-263 26
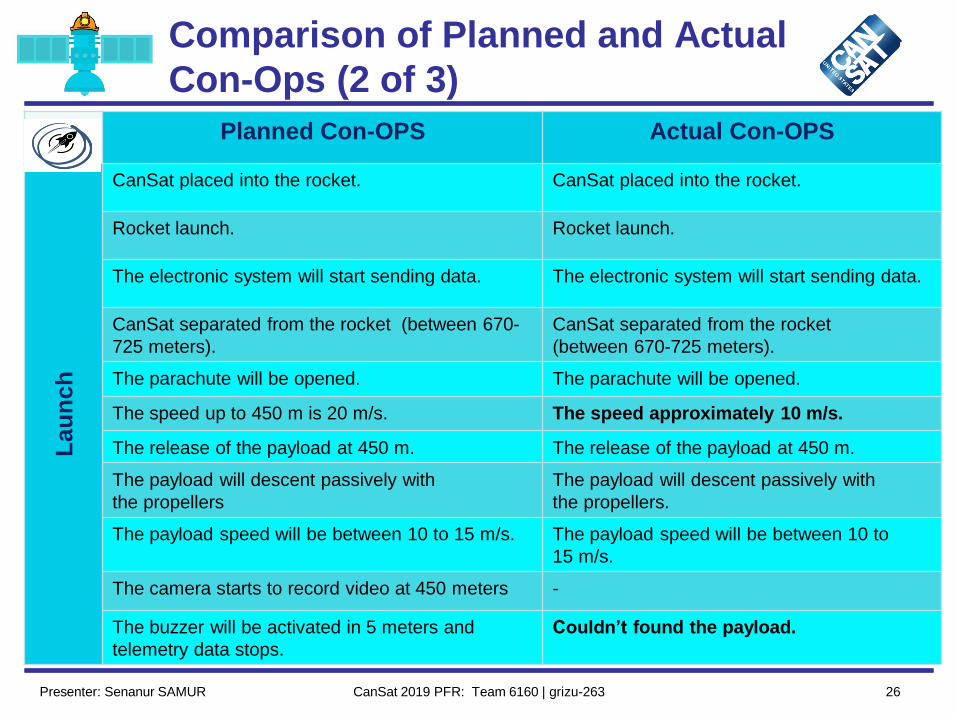
Comparison of Planned and Actual
Con-Ops (2 of 3)
Presenter: Senanur SAMUR
Planned Con-OPS Actual Con-OPS
La
un
ch
CanSat placed into the rocket. CanSat placed into the rocket.
Rocket launch. Rocket launch.
The electronic system will start sending data. The electronic system will start sending data.
CanSat separated from the rocket (between 670-
725 meters).
CanSat separated from the rocket
(between 670-725 meters).
The parachute will be opened. The parachute will be opened.
The speed up to 450 m is 20 m/s. The speed approximately 10 m/s.
The release of the payload at 450 m. The release of the payload at 450 m.
The payload will descent passively with
the propellers
The payload will descent passively with
the propellers.
The payload speed will be between 10 to 15 m/s. The payload speed will be between 10 to
15 m/s.
The camera starts to record video at 450 meters -
The buzzer will be activated in 5 meters and
telemetry data stops.
Couldn’t found the payload.
Team Logo
Here
(If You Want)
Team Logo
Here
CanSat 2019 PFR: Team 160 | grizu-263 27
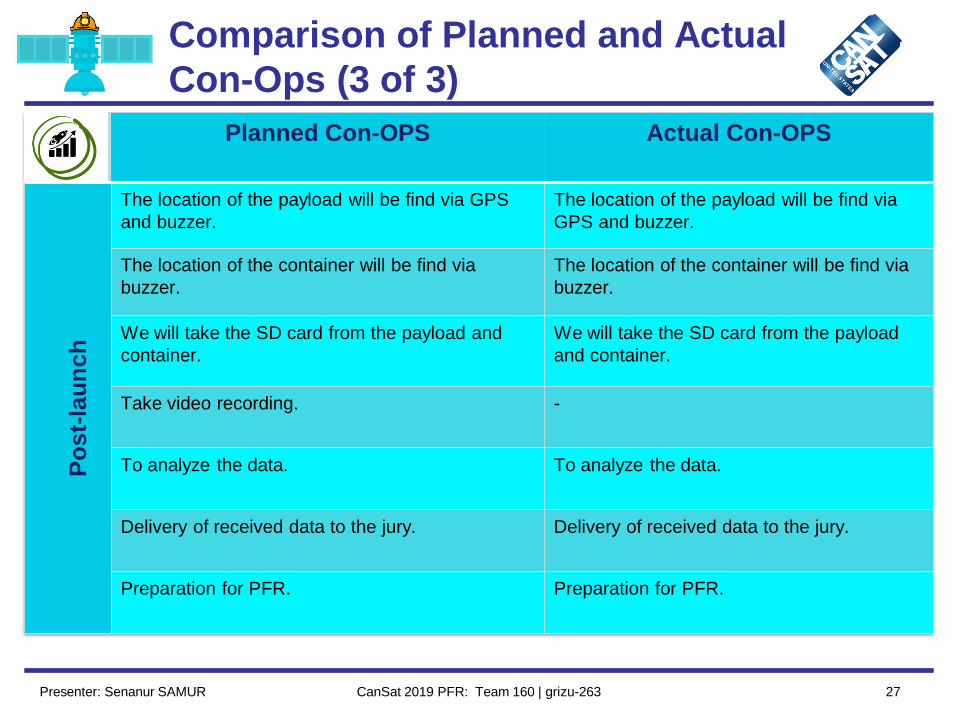
Comparison of Planned and Actual
Con-Ops (3 of 3)
Presenter: Senanur SAMUR
Planned Con-OPS Actual Con-OPS
Po
st-
lau
nc
h
The location of the payload will be find via GPS
and buzzer.
The location of the payload will be find via
GPS and buzzer.
The location of the container will be find via
buzzer.
The location of the container will be find via
buzzer.
We will take the SD card from the payload and
container.
We will take the SD card from the payload
and container.
Take video recording. -
To analyze the data. To analyze the data.
Delivery of received data to the jury. Delivery of received data to the jury.
Preparation for PFR. Preparation for PFR.
Team Logo
Here
(If You Want)
Team Logo
Here
CanSat 2019 PFR: Team 6160 | grizu-263 28
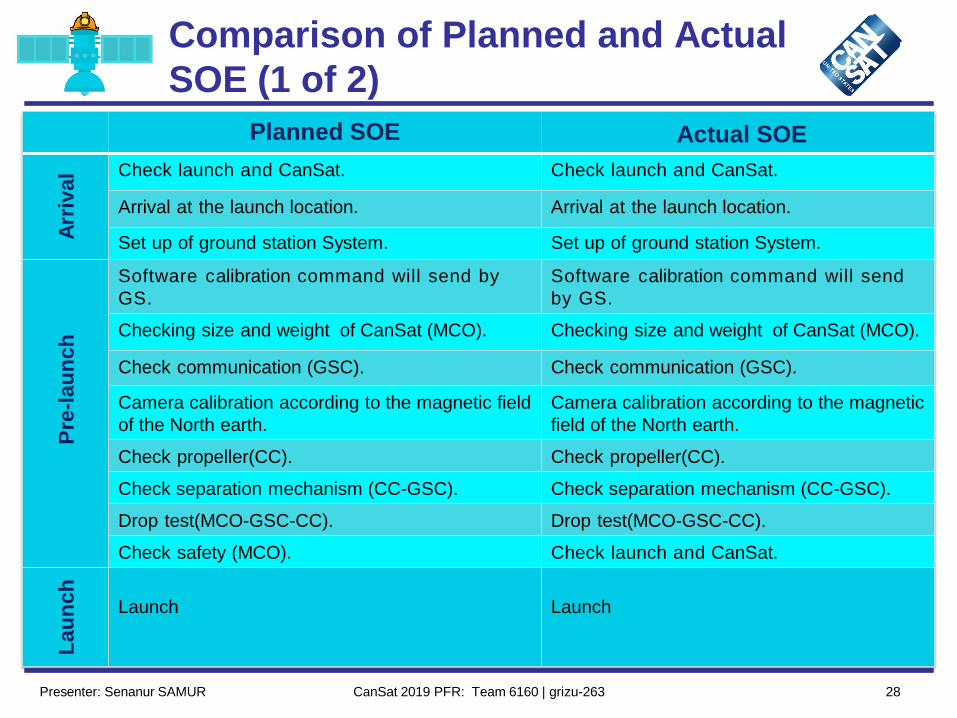
Comparison of Planned and Actual
SOE (1 of 2)
Presenter: Senanur SAMUR
Planned SOE Actual SOE
Arr
ival Check launch and CanSat. Check launch and CanSat.
Arrival at the launch location. Arrival at the launch location.
Set up of ground station System. Set up of ground station System.
Pre
-lau
nc
h
Software calibration command will send by
GS.
Software calibration command will send
by GS.
Checking size and weight of CanSat (MCO). Checking size and weight of CanSat (MCO).
Check communication (GSC). Check communication (GSC).
Camera calibration according to the magnetic field
of the North earth.
Camera calibration according to the magnetic
field of the North earth.
Check propeller(CC). Check propeller(CC).
Check separation mechanism (CC-GSC). Check separation mechanism (CC-GSC).
Drop test(MCO-GSC-CC). Drop test(MCO-GSC-CC).
Check safety (MCO). Check launch and CanSat.
La
un
ch
Launch Launch
Team Logo
Here
(If You Want)
Team Logo
Here
CanSat 2019 PFR: Team 6160 | grizu-263 29
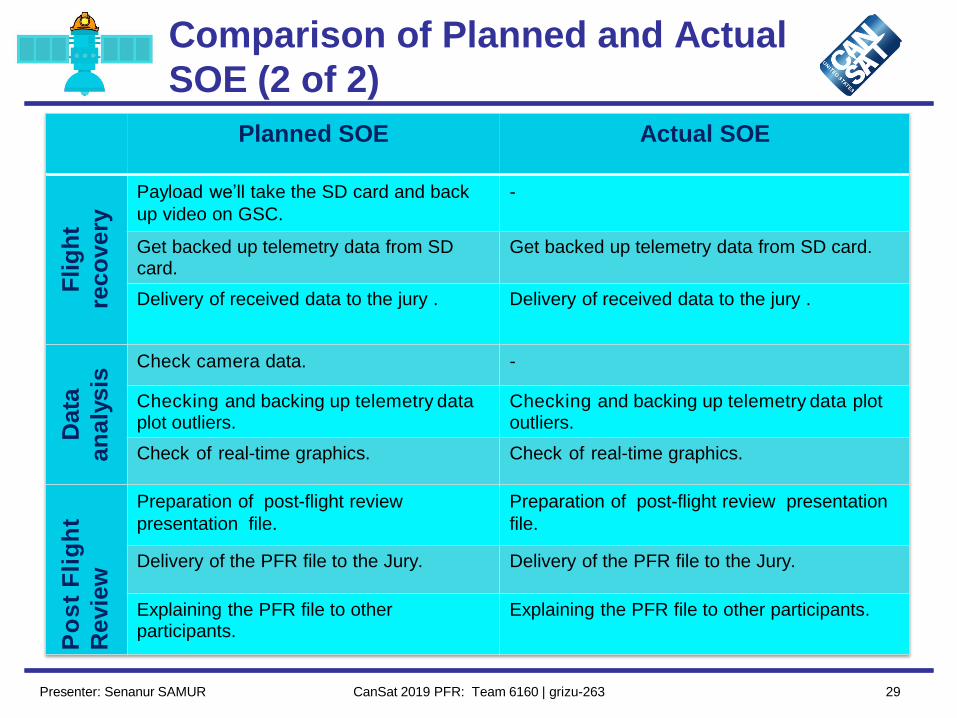
Comparison of Planned and Actual
SOE (2 of 2)
Presenter: Senanur SAMUR
Planned SOE Actual SOE
Fli
gh
t
rec
ove
ry
Payload we’ll take the SD card and back
up video on GSC.
-
Get backed up telemetry data from SD card.
Get backed up telemetry data from SD card.
Delivery of received data to the jury . Delivery of received data to the jury .
Data
an
aly
sis
Check camera data. -
Checking and backing up telemetry dataplot outliers.
Checking and backing up telemetry data plotoutliers.
Check of real-time graphics. Check of real-time graphics.
Po
st
Fli
gh
t
Re
vie
w
Preparation of post-flight review
presentation file.
Preparation of post-flight review presentation
file.
Delivery of the PFR file to the Jury. Delivery of the PFR file to the Jury.
Explaining the PFR file to other participants.
Explaining the PFR file to other participants.
Team Logo
Here
(If You Want)
Team Logo
Here
CanSat 2019 PFR: Team 6160 | grizu-263 30
Flight Data Analysis
Sedef ÖZEL
Team Logo
Here
(If You Want)
Team Logo
Here
CanSat 2019 PFR: Team 6160 | grizu-263 31
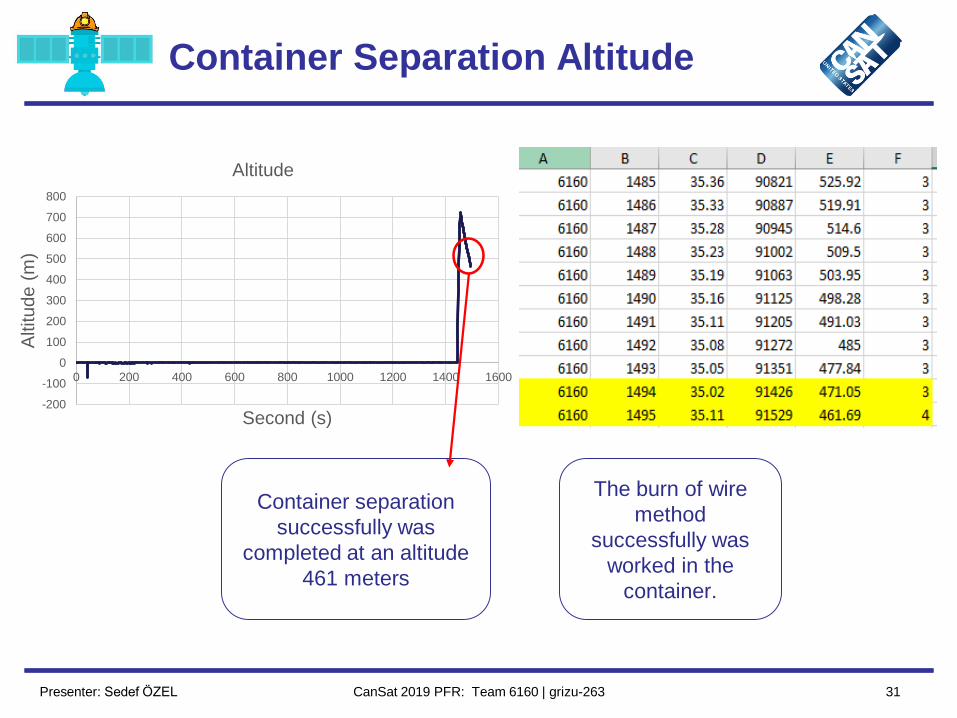
Container Separation Altitude
Presenter: Sedef ÖZEL
Container separation
successfully was
completed at an altitude
461 meters
-200
-100
0
100
200
300
400
500
600
700
800
0 200 400 600 800 1000 1200 1400 1600
Altitude
(m)
Second (s)
Altitude
The burn of wire
method
successfully was
worked in the
container.
Team Logo
Here
(If You Want)
Team Logo
Here
CanSat 2019 PFR: Team 6160 | grizu-263 32
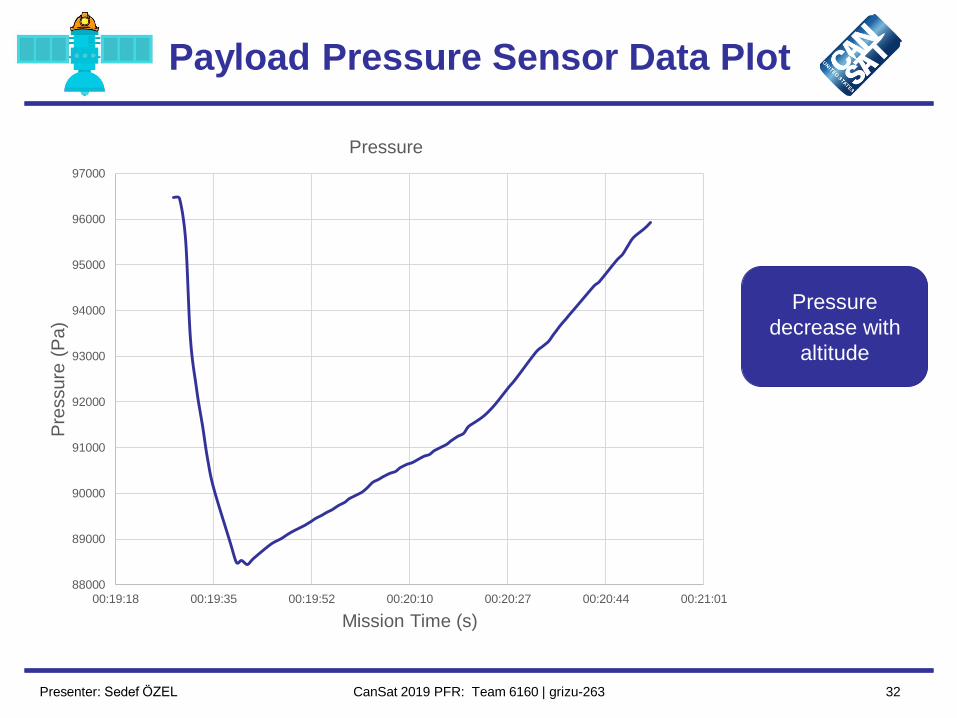
Payload Pressure Sensor Data Plot
Presenter: Sedef ÖZEL
Pressure
decrease with
altitude
88000
89000
90000
91000
92000
93000
94000
95000
96000
97000
00:19:18 00:19:35 00:19:52 00:20:10 00:20:27 00:20:44 00:21:01
Pre
ssure
(Pa)
Mission Time (s)
Pressure
Team Logo
Here
(If You Want)
Team Logo
Here
CanSat 2019 PFR: Team 6160 | grizu-263 33
Payload Altitude Plot (1 of 2)
Presenter: Sedef ÖZEL
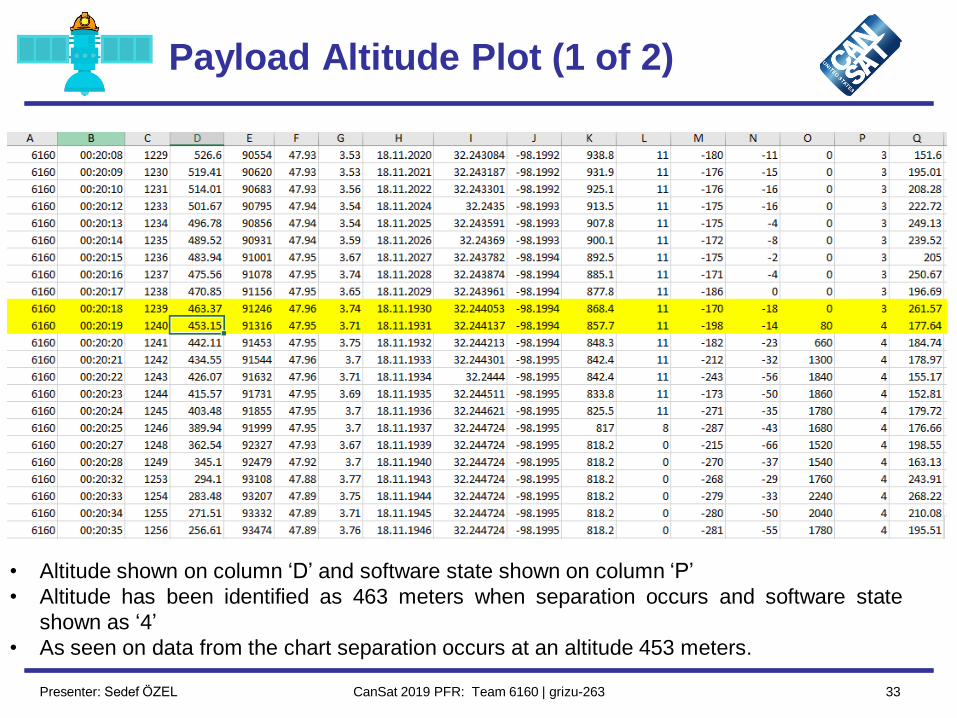
• Altitude shown on column ‘D’ and software state shown on column ‘P’
• Altitude has been identified as 463 meters when separation occurs and software state
shown as ‘4’
• As seen on data from the chart separation occurs at an altitude 453 meters.
Team Logo
Here
(If You Want)
Team Logo
Here
-100
0
100
200
300
400
500
600
700
800
900
00:19:18 00:19:35 00:19:52 00:20:10 00:20:27 00:20:44 00:21:01
Altitude
(m)
Mission Time (s)
Altitude
CanSat 2019 PFR: Team 6160 | grizu-263 34
Payload Altitude Plot (2 of 2)
Presenter: Sedef ÖZEL
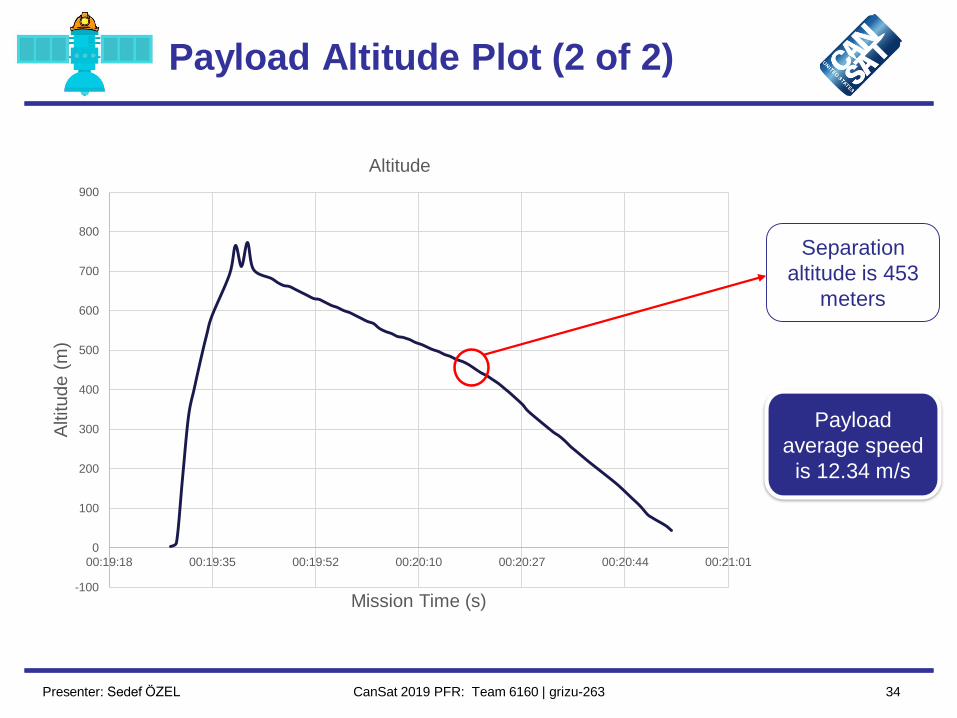
Payload
average speed
is 12.34 m/s
Separation
altitude is 453
meters
Team Logo
Here
(If You Want)
Team Logo
Here
CanSat 2019 PFR: Team 6160 | grizu-263 35
Payload Temperature Sensor Plot
Presenter: Sedef ÖZEL
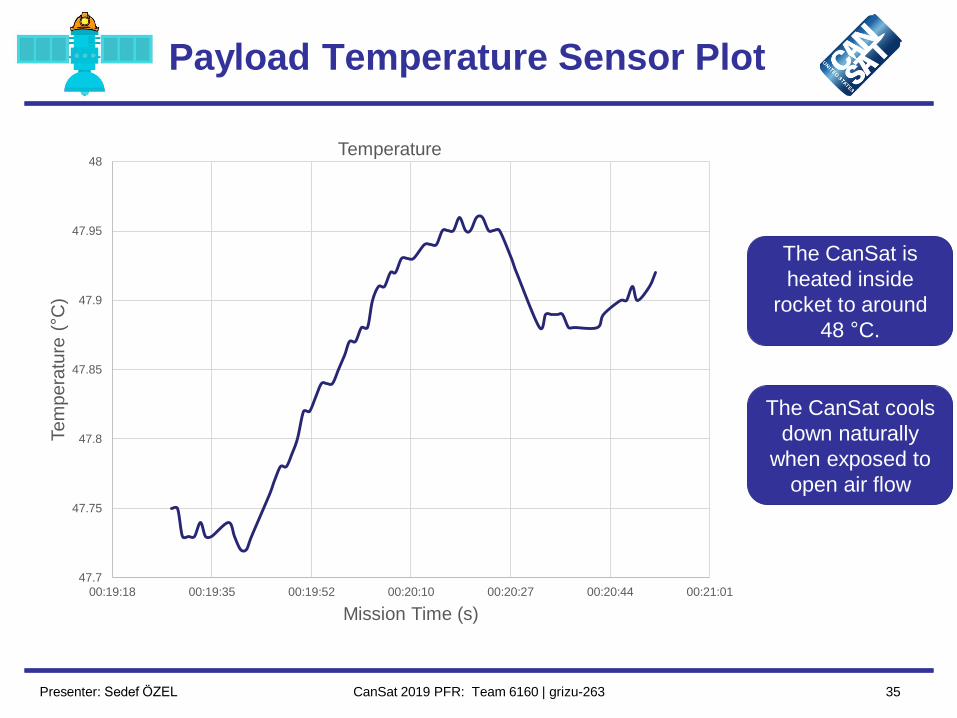
The CanSat is
heated inside
rocket to around
48 °C.
The CanSat cools
down naturally
when exposed to
open air flow
47.7
47.75
47.8
47.85
47.9
47.95
48
00:19:18 00:19:35 00:19:52 00:20:10 00:20:27 00:20:44 00:21:01
Tem
pera
ture
(°C
)
Mission Time (s)
Temperature
Team Logo
Here
(If You Want)
Team Logo
Here
CanSat 2019 PFR: Team 6160 | grizu-263 36
Payload GPS Plot (1 of 2)
Presenter: Sedef ÖZEL
-98.2002
-98.2
-98.1998
-98.1996
-98.1994
-98.1992
-98.199
-98.1988
-98.1986
-98.1984
-98.1982
-98.198
32.238 32.239 32.24 32.241 32.242 32.243 32.244 32.245 32.246
Lo
ng
itu
de
Latitude
GPS
Team Logo
Here
(If You Want)
Team Logo
Here
CanSat 2019 PFR: Team 6160 | grizu-263 37
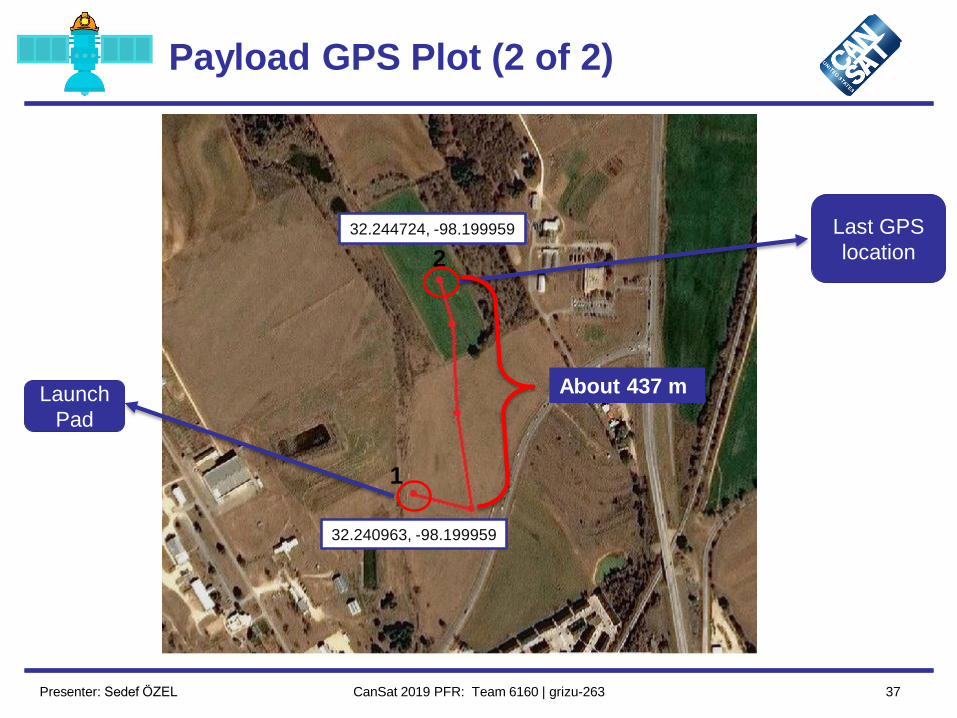
Payload GPS Plot (2 of 2)
Presenter: Sedef ÖZEL
Launch
Pad
1
2
Last GPS
location
About 437 m
32.240963, -98.199959
32.244724, -98.199959
Team Logo
Here
(If You Want)
Team Logo
Here
CanSat 2019 PFR: Team 6160 | grizu-263 38
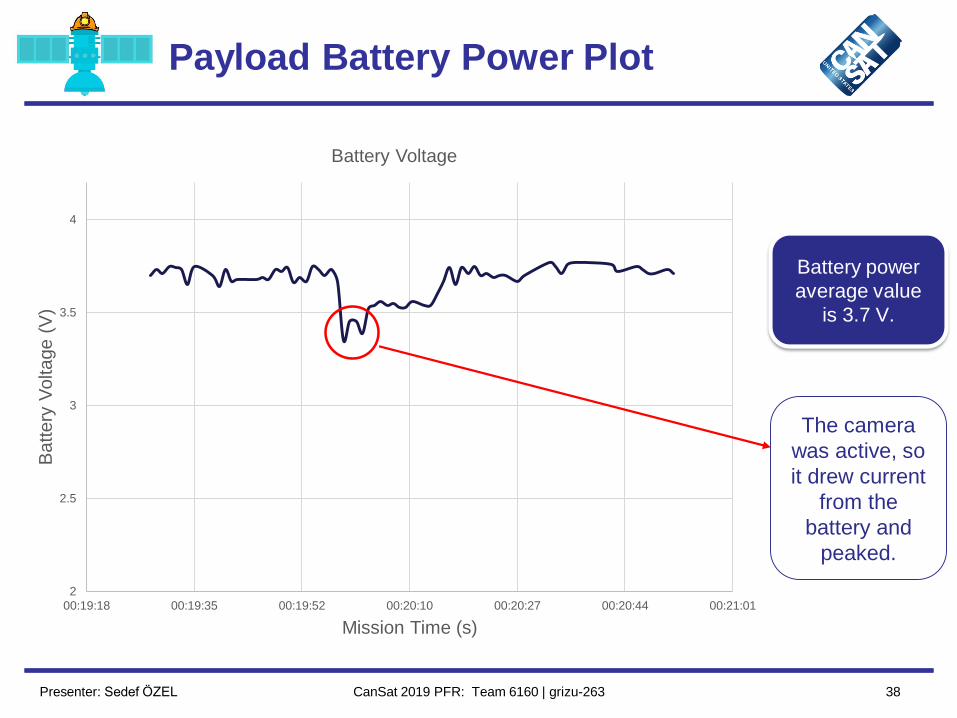
Payload Battery Power Plot
Presenter: Sedef ÖZEL
Battery power
average value
is 3.7 V.
2
2.5
3
3.5
4
00:19:18 00:19:35 00:19:52 00:20:10 00:20:27 00:20:44 00:21:01
Battery
Voltage
(V)
Mission Time (s)
Battery Voltage
The camera
was active, so
it drew current
from the
battery and
peaked.
Team Logo
Here
(If You Want)
Team Logo
Here
CanSat 2019 PFR: Team 6160 | grizu-263 39
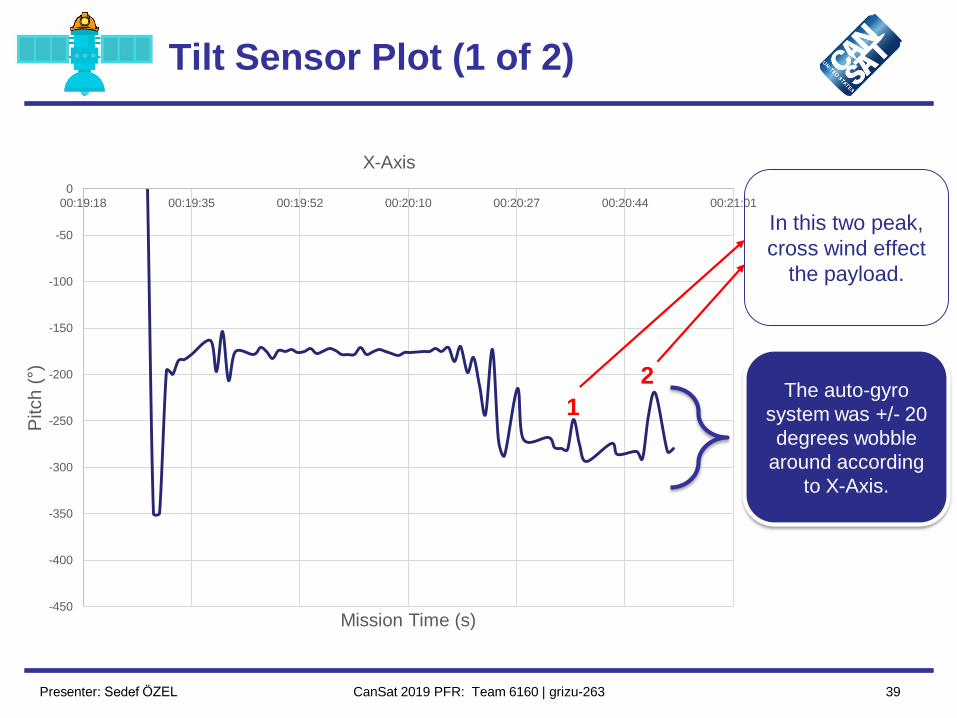
Tilt Sensor Plot (1 of 2)
Presenter: Sedef ÖZEL
The auto-gyro
system was +/- 20
degrees wobble
around according
to X-Axis.
-450
-400
-350
-300
-250
-200
-150
-100
-50
0
00:19:18 00:19:35 00:19:52 00:20:10 00:20:27 00:20:44 00:21:01
Pitch (
°)
Mission Time (s)
X-Axis
In this two peak,
cross wind effect
the payload.
1
2
Team Logo
Here
(If You Want)
Team Logo
Here
CanSat 2019 PFR: Team 6160 | grizu-263 40
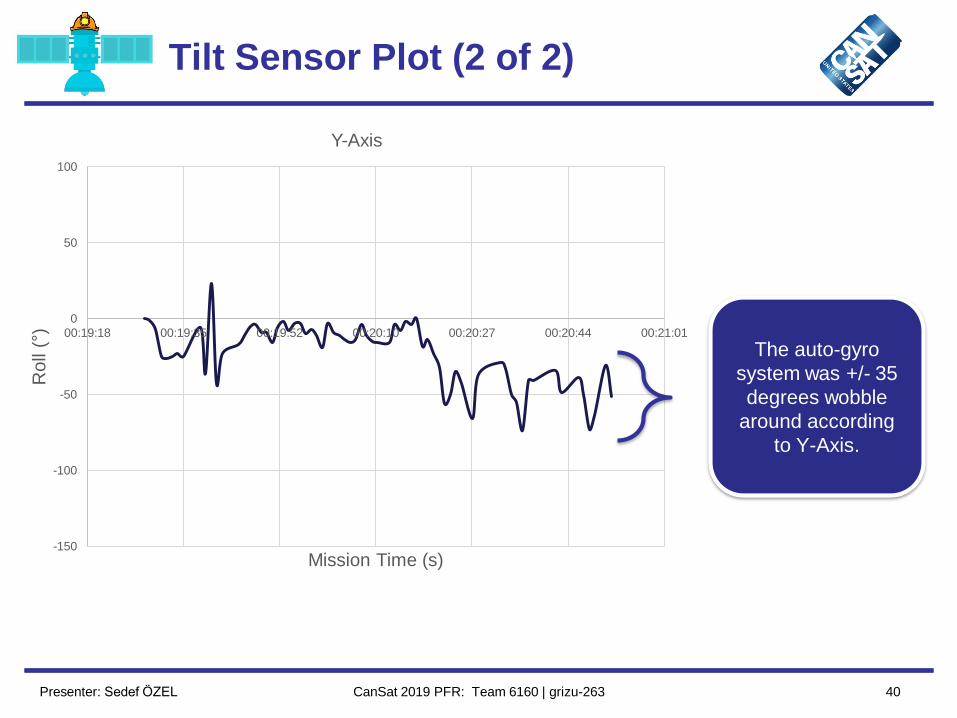
Tilt Sensor Plot (2 of 2)
Presenter: Sedef ÖZEL
The auto-gyro
system was +/- 35
degrees wobble
around according
to Y-Axis.
-150
-100
-50
0
50
100
00:19:18 00:19:35 00:19:52 00:20:10 00:20:27 00:20:44 00:21:01
Roll
(°)
Mission Time (s)
Y-Axis
Team Logo
Here
(If You Want)
Team Logo
Here
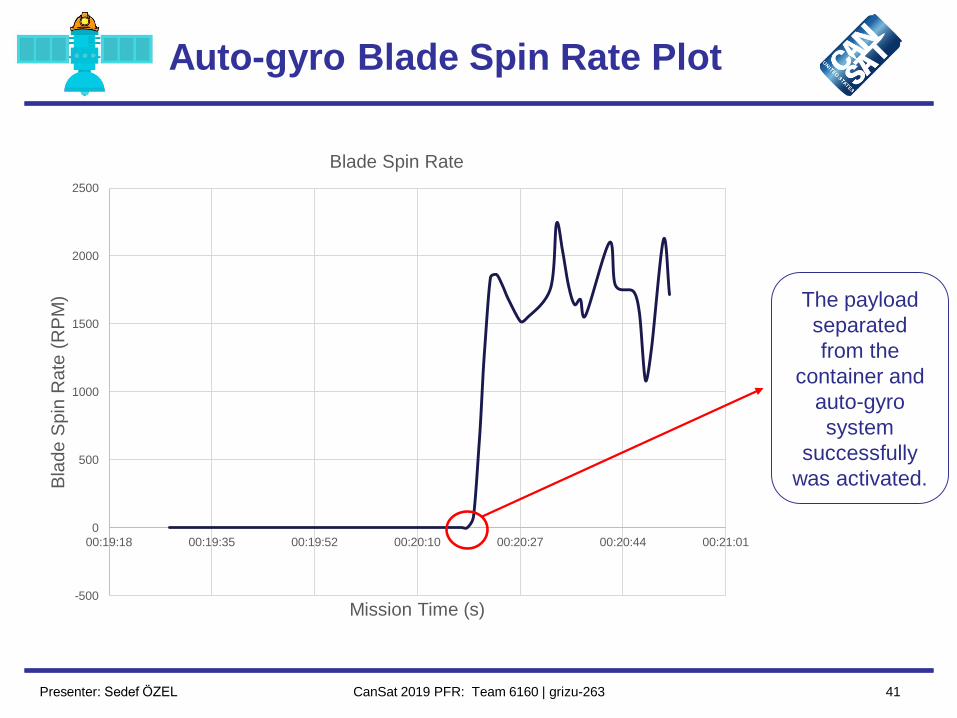
-500
0
500
1000
1500
2000
2500
00:19:18 00:19:35 00:19:52 00:20:10 00:20:27 00:20:44 00:21:01
Bla
de
Spin
Rate
(R
PM
)
Mission Time (s)
Blade Spin Rate
CanSat 2019 PFR: Team 6160 | grizu-263 41
Auto-gyro Blade Spin Rate Plot
Presenter: Sedef ÖZEL
The payload
separated
from the
container and
auto-gyro
system
successfully
was activated.
Team Logo
Here
(If You Want)
Team Logo
Here
CanSat 2019 PFR: Team 6160 | grizu-263 42
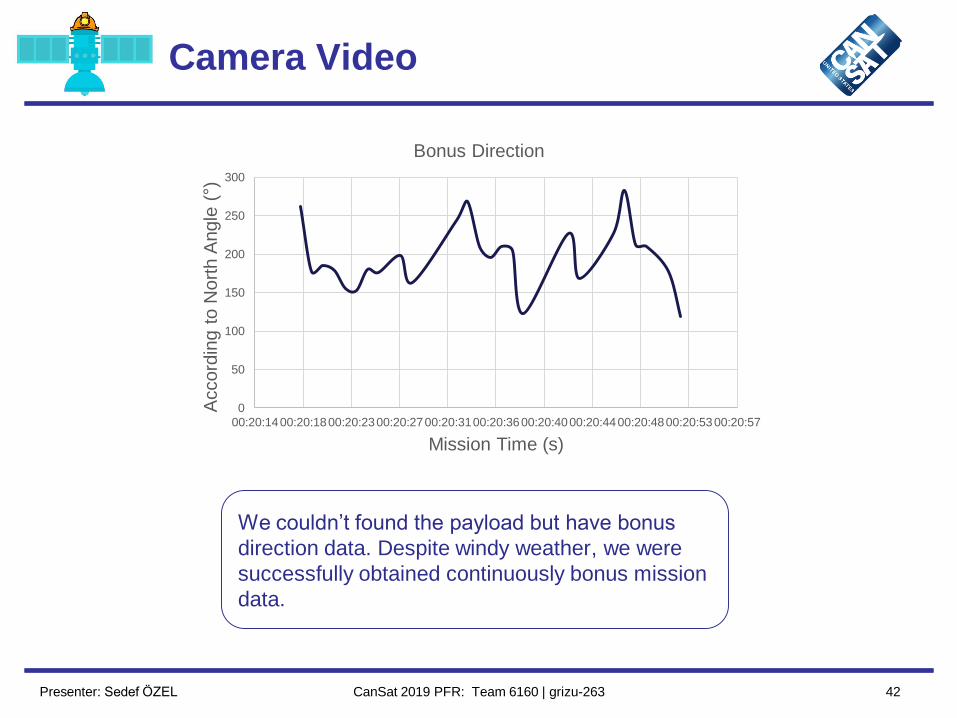
Camera Video
Presenter: Sedef ÖZEL
0
50
100
150
200
250
300
00:20:1400:20:1800:20:2300:20:2700:20:3100:20:3600:20:4000:20:4400:20:4800:20:5300:20:57
Accord
ing
toN
ort
h A
ngle
(°)
Mission Time (s)
Bonus Direction
We couldn’t found the payload but have bonus
direction data. Despite windy weather, we were
successfully obtained continuously bonus mission
data.
Team Logo
Here
(If You Want)
Team Logo
Here
CanSat 2019 PFR: Team 6160 | grizu-263 43
Failure Analysis
Sedef ÖZEL
Team Logo
Here
(If You Want)
Team Logo
Here
CanSat 2019 PFR: Team 6160 | grizu-263 44
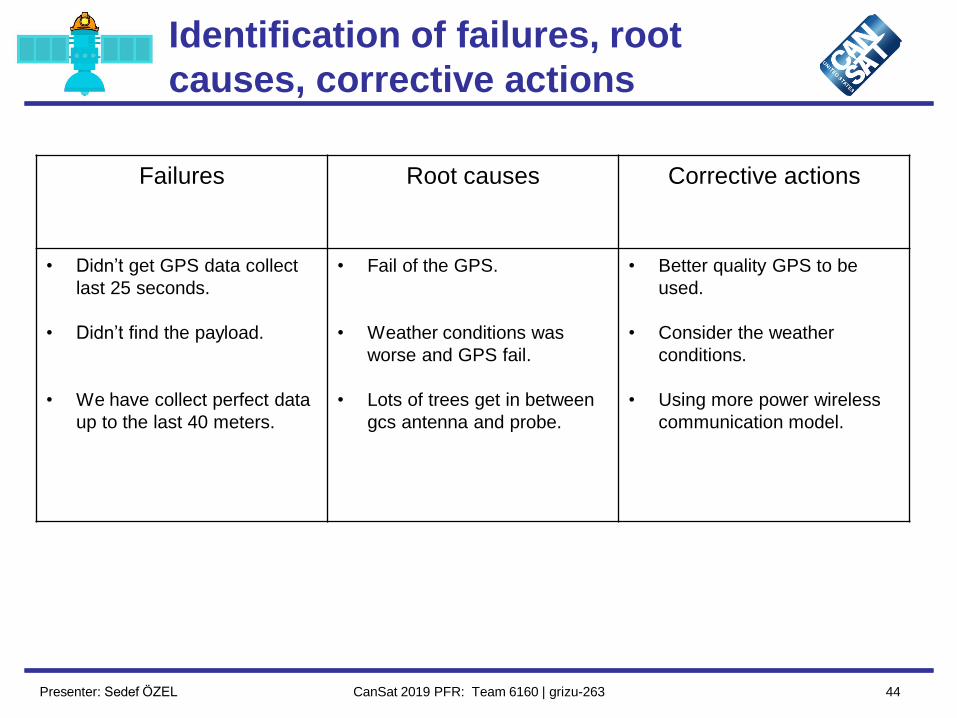
Identification of failures, root
causes, corrective actions
Presenter: Sedef ÖZEL
Failures Root causes Corrective actions
• Didn’t get GPS data collect
last 25 seconds.
• Didn’t find the payload.
• We have collect perfect data
up to the last 40 meters.
• Fail of the GPS.
• Weather conditions was
worse and GPS fail.
• Lots of trees get in between
gcs antenna and probe.
• Better quality GPS to be
used.
• Consider the weather
conditions.
• Using more power wireless
communication model.
Team Logo
Here
(If You Want)
Team Logo
Here
CanSat 2019 PFR: Team 6160 | grizu-263 45
Lessons Learned
Sedef ÖZEL
Team Logo
Here
(If You Want)
Team Logo
Here
CanSat 2019 PFR: Team 6160 | grizu-263 46
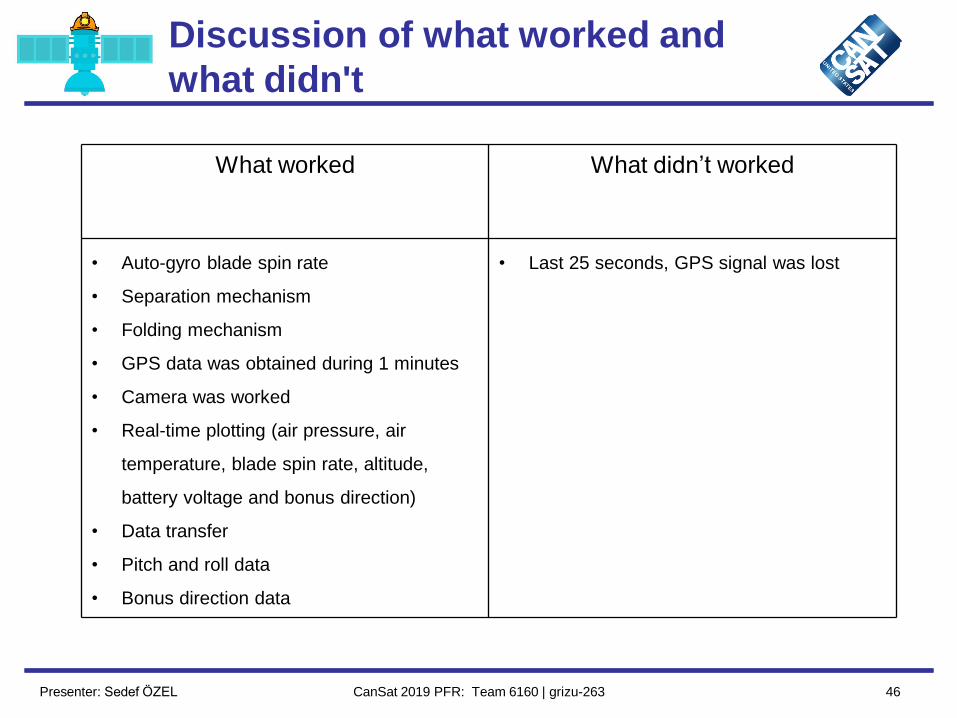
Discussion of what worked and
what didn't
Presenter: Sedef ÖZEL
What worked What didn’t worked
• Auto-gyro blade spin rate
• Separation mechanism
• Folding mechanism
• GPS data was obtained during 1 minutes
• Camera was worked
• Real-time plotting (air pressure, air
temperature, blade spin rate, altitude,
battery voltage and bonus direction)
• Data transfer
• Pitch and roll data
• Bonus direction data
• Last 25 seconds, GPS signal was lost
Team Logo
Here
(If You Want)
Team Logo
Here
CanSat 2019 PFR: Team 6160 | grizu-263 47
Conclusions
Presenter: Sedef ÖZEL
• Totally Launch was successfully. All the requirements and mission
completed.
• We observed that how important to testing for a successfull mission.
• We learned how to management time.
• We improved the knowledge of product, design and mounting of
mechanic parts.
• Participants of the team learned how to choose materials selection
and design for a satellite project.
• We learned that we need to consider weather conditions and external
factors while developing the project.
• We learned that the software we developed should be parametric.
• We get a lot of experience an interdisciplinary project.

Team Logo
Here
(If You Want)
Team Logo
Here
CanSat 2019 PFR: Team 6160 | grizu-263 48
Conclusions
Presenter: Sedef ÖZEL
Thanks for listening