capitolo 6 studio numerico e sperimentale relativo alla...
TRANSCRIPT
Capitolo 6
Capitolo 6
Studio numerico e sperimentale relativo alla struttura Baby Frame
6.1 Introduzione
Dopo aver validato il nostro metodo di SHM con la procedura descritta nel capitolo
precedente si è provveduto alla sua applicazione su di una struttura esistente chiamata
Baby-Frame e situata nell’ELSA Laboratory (European Laboratory for Structural
Assessment-Laboratorio Europeo per le verifiche strutturali) del JRC (Joint Research
Centre) di Ispra (VA) sul Lago Maggiore [41].
Tale laboratorio si occupa della ricerca nel campo del patrimonio artistico e culturale, le
attività da esso svolte riguardano diversi settori [4]:
attività di sostegno all’Eurocodice 8;
protezione sismica di strutture attraverso l’utilizzo di isolatori e smorzatori
viscoelastici;
controllo attivo, passivo e semiattivo nell’ingegneria civile;
valutazione e retrofitting di telai in c.a.;
valutazione sismica di strutture in muratura.
L’obiettivo principale di questo laboratorio è quello di contribuire alla definizione di
metodologie di intervento per il sistema diagnostico strutturale. Sono state quindi
studiate nuove tecnologie indirizzate alla prevenzione ed al consolidamento sismico. Per
simulare l’effetto sismico, il laboratorio ELSA dispone di un muro di reazione con cui si
possono eseguire prove pseudodinamiche, dinamiche, cicliche, di carico e a fatica.
Ovvero presso tale laboratorio si possono eseguire tutte quelle prove necessarie per la
verifica di una struttura in ca, acciaio, mista e in muratura.
86

Capitolo 6
Il muro di reazione è alto 16 m e consente di eseguire sperimentazioni su edifici di 3, 4
o 5 piani in scala reale; uno degli edifici così testati è stato considerato in questa sede: il
Baby-Frame. Su tale struttura sono stati condotti sia studi numerici dapprima che,
successivamente, studi sperimentali.
6.2 Descrizione della struttura
La struttura, chiamata Baby-Frame, è costituita da un telaio in acciaio con tre solai in
cemento armato e lamiera grecata per un’altezza totale di 6 m; longitudinalmente è
costituita da due campate di 4 m ciascuna e trasversalmente da una campata di 2.5 m.
Essa è in scala 2:3 rispetto alla struttura reale [33].
Figura 6.I: Carpenteria di piano e sezione del Baby-Frame.
87

Capitolo 6
Le colonne sono costituite da profilati in acciaio Fe 360 del tipo HEB 140 saldati a
profili IPE 180 che costituiscono le travi di piano.
Figura 6.II: Particolare del nodo trave-colonna.
La soletta in cemento armato è stata gettata in opera su lamiera grecata fissata,
attraverso dei chiodi, alle flange superiori della trave, come mostrato in Figura 6.III.
Figura 6.III: Particolare di attacco della soletta alla trave.
La struttura è stata costruita all’interno del laboratorio ELSA e ancorata alla base del
muro di reazione [33]. Essa è stata concepita come benchmark per il controllo
strutturale e per le tecniche di “structural health monitoring”. In base a ciò è stata testata
in modo estensivo con tecniche dinamiche e pseudodinamiche descritte nel Capitolo 2.
Sono inoltre stati testati diversi dispositivi di controllo delle vibrazioni.
88
Capitolo 6
Figura 6.IV: Visione globale del BabyFrame.
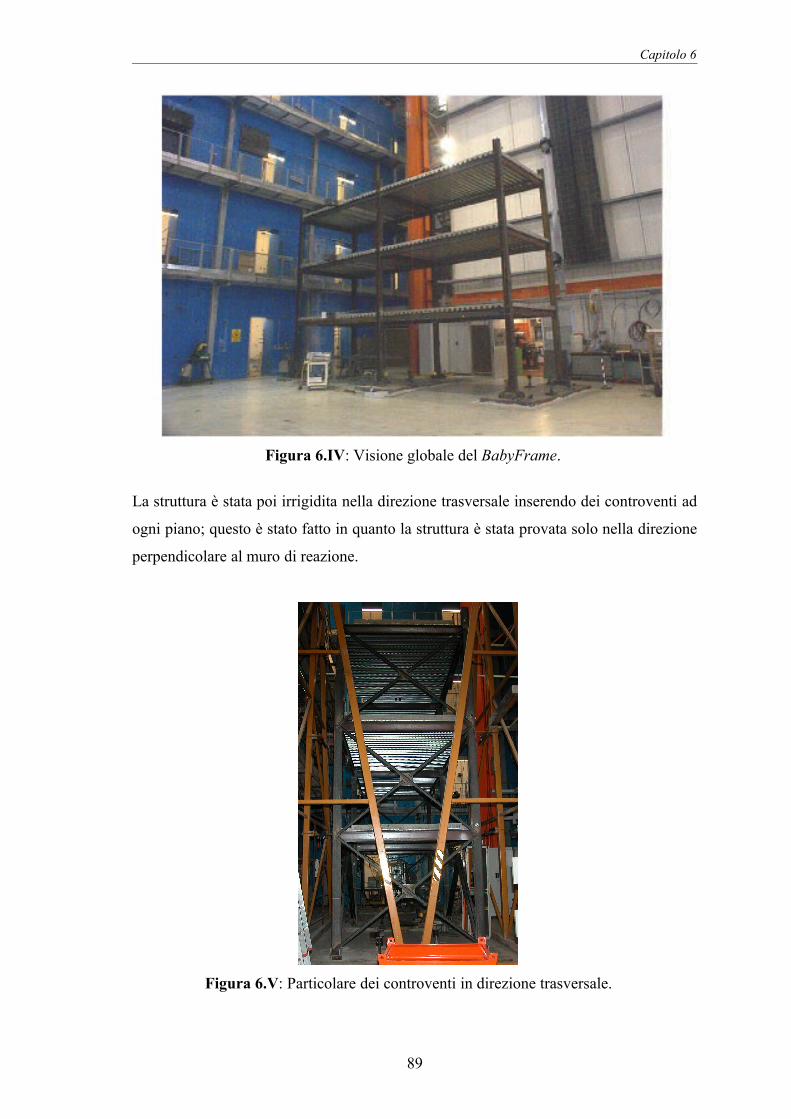
La struttura è stata poi irrigidita nella direzione trasversale inserendo dei controventi ad
ogni piano; questo è stato fatto in quanto la struttura è stata provata solo nella direzione
perpendicolare al muro di reazione.
Figura 6.V: Particolare dei controventi in direzione trasversale.
89
Capitolo 6
6.3 Simulazioni numeriche
La struttura presa in esame è stata modellata attraverso un modello di tipo shear-type
[12], [34], ossia avente pilastri con deformazione assiale nulla e solai di piano rigidi. La
rigidezza dei piani è di almeno un ordine di grandezza maggiore della rigidezza delle
colonne.
Nel modello preso in esame le masse m1, m2 e m3 si immaginano concentrate nei solai di
piano e valgono rispettivamente 8960, 8960 e 8880 kg; i coefficienti della matrice di
rigidezza possono essere valutati applicando successivamente uno spostamento unitario
ad ogni grado di libertà, vincolando tutti gli altri e determinando le reazioni sviluppate
in ogni elemento. Per una colonna fissa al terreno e la cui estremità superiore può
solamente traslare il coefficiente di rigidezza flessionale k vale [12]:
3
12LEI
uFk == (6.1)
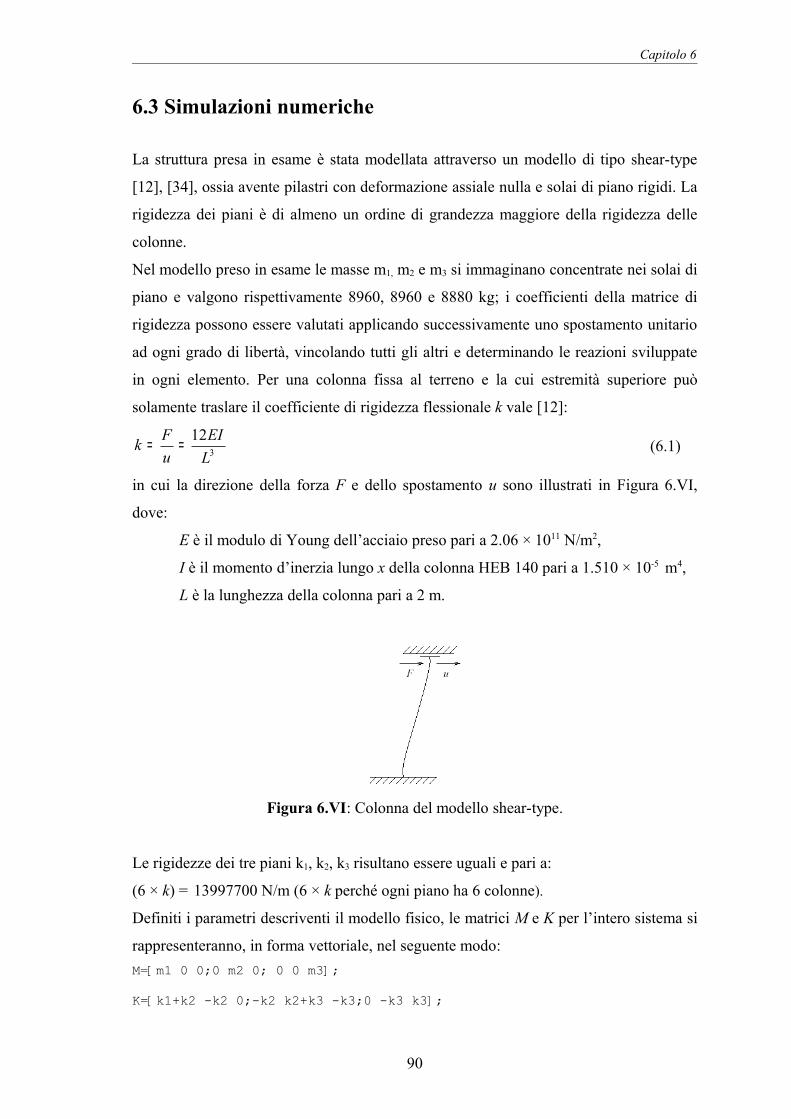
in cui la direzione della forza F e dello spostamento u sono illustrati in Figura 6.VI,
dove:
E è il modulo di Young dell’acciaio preso pari a 2.06 × 1011 N/m2,
I è il momento d’inerzia lungo x della colonna HEB 140 pari a 1.510 × 10-5 m4,
L è la lunghezza della colonna pari a 2 m.
Figura 6.VI: Colonna del modello shear-type.
Le rigidezze dei tre piani k1, k2, k3 risultano essere uguali e pari a:
(6 × k) = 13997700 N/m (6 × k perché ogni piano ha 6 colonne).
Definiti i parametri descriventi il modello fisico, le matrici M e K per l’intero sistema si
rappresenteranno, in forma vettoriale, nel seguente modo:M=[m1 0 0;0 m2 0; 0 0 m3];
K=[k1+k2 -k2 0;-k2 k2+k3 -k3;0 -k3 k3];
90

Capitolo 6
Dove k1 fa riferimento alla rigidezza delle colonne tra il suolo e il primo piano (ad
esempio al primo interpiano), k2 fa riferimento al secondo interpiano e k3 fa riferimento
al terzo interpiano, mentre per quanto riguarda le masse m1 fa riferimento alla massa del
primo piano, m2 alla massa del secondo piano ed m3 alla massa del terzo piano.
Ciò deriva sempre dall’ipotesi di idealizzare la struttura con un modello di tipo shear-
type, ovvero con un modello nel quale ogni piano presenta un solo grado di libertà.
Di conseguenza la costruzione Baby-Frame, essendo costituita da tre piani, è descritta
da matrici di dimensioni 3×3 e il numero totale di variabili da identificare con
l’algoritmo evolutivo à pari a tre.
Le matrici di massa e rigidezza risultano quindi essere:
1) matrice di rigidezza K [N/m]
−−−
−
13997700139977000139977002799540013997700
01399770027995400
2) matrice delle masse M [Kg]
888000089600008960
Le tre frequenze naturali della struttura integra, calcolate a partire dalle matrici sopra
esposte, risultano essere pari a: 3.9684, 11.1109, 16.0384 Hz.
Per ogni frequenza propria esiste una forma modale, ovvero esiste una configurazione
geometrica assunta istantaneamente dai punti costituenti la struttura (corpo elastico) che
vibra ad una delle sue frequenze proprie.
La figura seguente mostra le diverse configurazioni della struttura assunte nelle sue
diverse forme modali:
modo 1 modo 2 modo 3
Figura 6.VII: Prima, seconda e terza forma modale del Baby-Frame.
91
Capitolo 6
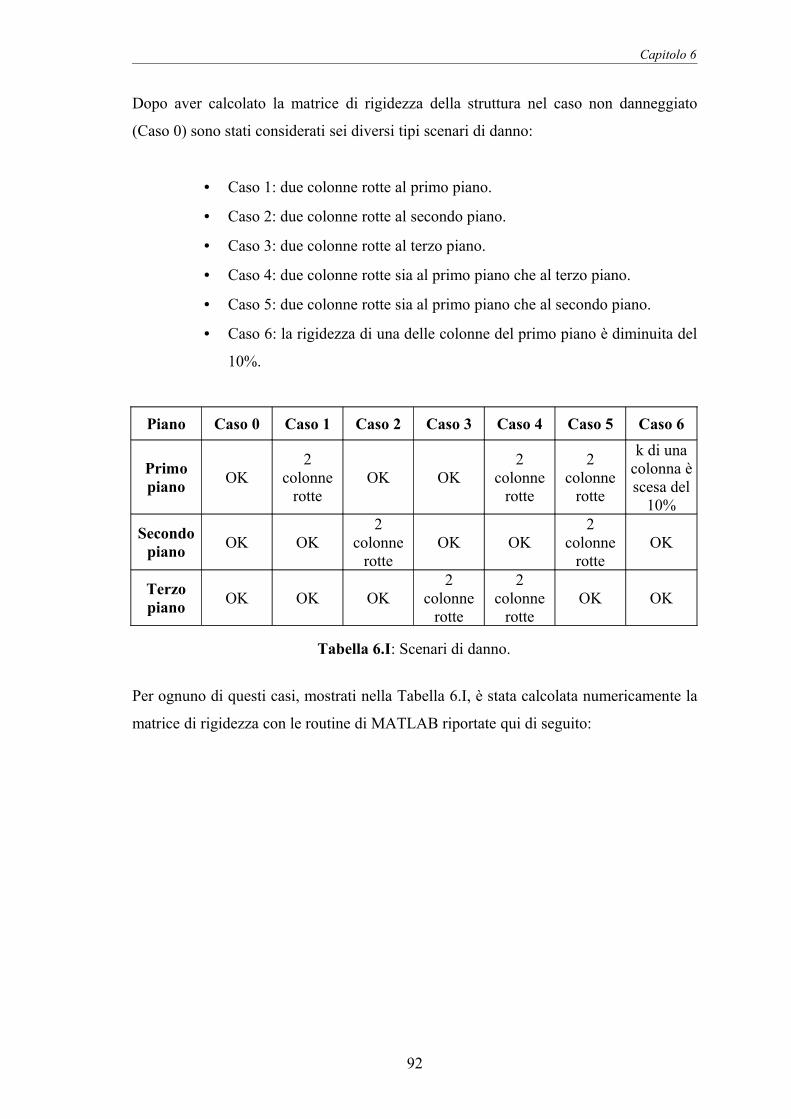
Dopo aver calcolato la matrice di rigidezza della struttura nel caso non danneggiato
(Caso 0) sono stati considerati sei diversi tipi scenari di danno:
• Caso 1: due colonne rotte al primo piano.
• Caso 2: due colonne rotte al secondo piano.
• Caso 3: due colonne rotte al terzo piano.
• Caso 4: due colonne rotte sia al primo piano che al terzo piano.
• Caso 5: due colonne rotte sia al primo piano che al secondo piano.
• Caso 6: la rigidezza di una delle colonne del primo piano è diminuita del
10%.
Piano Caso 0 Caso 1 Caso 2 Caso 3 Caso 4 Caso 5 Caso 6
Primo piano OK
2 colonne
rotteOK OK
2 colonne
rotte
2 colonne
rotte
k di una colonna è scesa del
10%
Secondo piano OK OK
2 colonne
rotteOK OK
2 colonne
rotteOK
Terzo piano OK OK OK
2 colonne
rotte
2 colonne
rotteOK OK
Tabella 6.I: Scenari di danno.
Per ognuno di questi casi, mostrati nella Tabella 6.I, è stata calcolata numericamente la
matrice di rigidezza con le routine di MATLAB riportate qui di seguito:
92

Capitolo 6
programma per la simulazione del danno nel Baby-Frame
% calcolo a mano della matrice di rigidezza del BABY-FRAME nei vari scenari di danno, il danno viene simulato facendo variare il numero di colonne che concorrono alla rigidezza di ogni singolo piano.% unita' in SI
m=[8960, 8960, 8880]; %masse dei piani in Kg
E=2.06e11; % come da SAP N/mL=2; % lunghezza di ogni colonnaJ=1.51e-5; % momento d'inerzia lungo x della trave HEB140
k1=4*E*J/12*L^3 % N/m (moltiplicato per 4 perchè sto considerando il primo caso di danno!)
k2=6*E*J/12*L^3 % N/m (moltiplicato per 6 perchè ad ogni piano ho 6 colonne)
k3=6*E*J/12*L^3 % N/m (moltiplicato per 6 perchè ad ogni piano ho 6 colonne)
M=diag(m)Kexact=assembla([k1 k2 k3])Vexact=autovalori(M,Kexact) %queste sono le nostre frequenze esatte
programma per l’assemblaggio della matrice di rigidezza
function [AUX]=assembla(aux) % nome della funzione che si occupa dell'assemblaggio
n=length(aux); % numero dei gradi di libertà=alla lunghezza di aux
AUX=zeros(n,n); % matrice di zero % assemblaggio matrice:
AUX(1,1)=aux(1)+aux(2);AUX(1,2)=-aux(2);for I=2:n-1
AUX(I,I-1)=-aux(I);AUX(I,I)=aux(I)+aux(I+1); AUX(I,I+1)=-aux(I+1);
endAUX(n,n-1)=-aux(n);AUX(n,n)=aux(n);
93

Capitolo 6
programma per il calcolo degli autovalori (frequenze proprie) della struttura
function [V]=autovalori(M,K) % nome della funzione che si occupa del calcolo degli autovalori.
V=[];AUX=[];AUX=inv(M)*K;[autovett, autoval]=eig(AUX);freq=diag(autoval^.5); % in rad/secfreqhz=freq/(2*pi); % in Hz
V=sort(freqhz); % ordina le frequenze in senso crescente
Tramite queste routine il danno è stato simulato facendo variare il numero di colonne
che concorrono alla rigidezza di ogni piano (per esempio nel Caso1: k1 = 4 × k e non più
6 × k in quanto due colonne si sono rotte al primo piano); successivamente risolvendo
l’equazione (1.4), riportata nell’Appendice A, sono state calcolate le frequenze
principali della struttura rispettivamente per ogni caso di danneggiamento preso in
considerazione ottenendo i valori riportati nella Tabella 6.II.
FREQUENZE [Hz]Caso 0 Caso 1 Caso 2 Caso 3 Caso 4 Caso 5 Caso 6
3.9684 3.5104 3.6561 3.8622 3.443 3.2976 3.9507
11.1109 10.4331 10.8123 9.8107 9.2343 9.9084 11.0785
16.0384 15.7825 14.6081 15.2403 14.8298 14.4305 16.0242
Tabella 6.II: Frequenze principali della struttura nel caso non danneggiato ed in ogni caso di danno.
Dall’osservazione dei valori assunti dalle frequenze principali della struttura nei vari
casi di danno si può notare come il verificarsi di un danneggiamento causi una
variazione sensibile delle proprietà dinamiche della struttura. Attraverso quindi questa
correlazione tra danneggiamento e comportamento dinamico il nostro metodo di SHM
riesce ad individuare la presenza di un danno all’interno della struttura. Anche in questo
caso però, in modo analogo a quanto fatto per la struttura benchmark, il metodo
sviluppato in questa sede non è in grado di fornire nessun tipo di informazione circa la
posizione dell’elemento strutturale danneggiato all’interno del piano considerato.
94

Capitolo 6
6.4 Simulazioni numeriche con l’algoritmo evolutivo
Attraverso il primo metodo di identificazione con l’algoritmo evolutivo descritto nel
Capitolo 4 e riportato nell’Appendice C, ovvero a partire da tutte le frequenze principali
calcolate numericamente (vedi Tabella 6.II del paragrafo precedente), si è risalti alla
matrice di rigidezza della struttura. Tale matrice è risultata essere esattamente uguale a
quella calcolata numericamente. Ciò significa che col processo di ottimizzazione si è
arrivati ad ottenere la soluzione esatta del problema di identificazione.
Si è poi proceduto a smembrare la matrice di rigidezza nei suoi singoli elementi,
mediante l’uso della routine di MATLAB riportata nel capitolo precedente, ottenendo
per ogni caso di danno i valori di rigidezza riportati nella Tabella 6.III e raffigurati negli
istogrammi di Figura 6.VIII.
RIGIDEZZA senza danno
1° caso di danno
2° caso di danno
3° caso di danno
4° caso di danno
5° caso di danno
6° caso di danno
K1 × 106 [N/m] 27.9954 18.6636 27.9954 27.9954 18.6636 18.6636 27.5288
K2 × 106 [N/m] 27.9954 27.9954 18.6636 27.9954 27.9954 18.6636 27.9954
K3 × 106 [N/m] 27.9954 27.9954 27.9954 18.6636 18.6636 27.9954 27.9954
Tabella 6.III: Rigidezze dei piani.
95

Capitolo 6
c a s o 0 c a s o 1 c a s o 2 c a s o 3 c a s o 4 c a s o 5 c a s o 60
0 . 5
1
1 . 5
2
2 . 5
3x 1 0
7
C A S I D I D A N N O
RIG
IDE
ZZ
A P
RIM
O P
IAN
O [
N/m
]
piano 1
c a s o 0 c a s o 1 c a s o 2 c a s o 3 c a s o 4 c a s o 5 c a s o 60
0 . 5
1
1 . 5
2
2 . 5
3x 1 0
7
C A S I D I D A N N O
RIG
IDE
ZZ
A S
EC
ON
DO
PIA
NO
[N
/m]
piano 2
c a s o 0 c a s o 1 c a s o 2 c a s o 3 c a s o 4 c a s o 5 c a s o 6
0
0 . 5
1
1 . 5
2
2 . 5
3x 1 0
7
C A S I D I D A N N O
RIG
IDE
ZZ
A T
ER
ZO
PIA
NO
[N
/m]
piano 3
Figura 6.VIII: Istogrammi delle rigidezze dei piani nei vari casi di danno considerati.
Dall’osservazione della Tabella 6.III e degli istogrammi di Figura 6.VIII si può notare
che in ognuno dei casi considerati l’ammontare del danneggiamento è indicato, come
nella struttura benchmark, dalla degradazione della rigidezza corrispondente ai vari
piani della struttura. Per questo motivo, per esempio, nel Caso 1 la rigidezza del primo
piano diminuisce drasticamente. Inoltre anche una parziale riduzione della rigidezza
(Caso 6) si riflette sui valori delle frequenze naturali della struttura e perciò viene
identificata dall’algoritmo evolutivo. Tramite questo metodo però, come già
precedentemente accennato, viene rilevato solo il danno che si riflette sui parametri
modali della struttura, di conseguenza un danno locale che non comporta una variazione
delle frequenze proprie non può essere identificato.
96

Capitolo 6
In conclusione osservando i risultati ottenuti con le varie simulazioni effettuate con
l’algoritmo evolutivo, si può affermare che essi risultano perfettamente in accordo con i
dati ricavati dal modello numerico della struttura Baby-Frame sotto diverse ipotesi di
danno.
Di conseguenza quindi questa uguaglianza dei risultati ottenuti dimostra che il metodo
di SHM, sviluppato in questo studio, a partire dai valori dei parametri modali è in grado
di identificare, tramite un processo di ottimizzazione, la matrice di rigidezza della
struttura.
Comparando poi tale matrice con quella della struttura non danneggiata viene
determinata la presenza e l’ubicazione del danno senza però fornire indicazioni precise
sulla posizione, all’interno del piano considerato, delle colonne danneggiate.
Come già precedentemente affermato nell’ambito di questo studio numerico il danno
viene simulato tramite l’eliminazione delle colonne. Nella realtà pratica però il
danneggiamento viene simulato eliminando i controventi e non le colonne della
struttura. Questo perché è molto più semplice da un punto di vista pratico
l’eliminazione di un controvento rispetto all’eliminazione di una colonna.
97

Capitolo 6
6.5 Identificazione della matrice di rigidezza a partire dai dati sperimentali
Come già brevemente accennato nell’introduzione del capitolo, presso l’ELSA
Laboratory di Ispra sono state effettuate delle prove dinamiche sulla struttura Baby-
Frame. Le storie temporali di spostamento e accelerazione della struttura, così ottenute,
sono state organizzate all’interno di un database, la cui interfaccia grafica è stata
riportata nella Figura 6.IX, disponibile al sito:
http://sm26db.jrc.it/laboratory/database.
Questo sito presenta un accesso limitato in quanto è necessario essere dotati di una
password per accedervi, la quale è stata gentilmente concessa. Come chiaramente si può
intuire dall’osservazione della Figura 6.IX all’interno del database sono presenti i dati
relativi a diversi tipi di test, sia statici che dinamici (prove cicliche, random burst, snap
back), effettuati su diversi tipi di strutture costruite in scala reale. All’interno del
database sono contenute le registrazioni dei segnali di spostamento ed accelerazione
prodotti durante i diversi tipi di prove. Si possono inoltre trovare i filmati e le foto dei
test effettuati.
Figura 6:IX: Interfaccia grafica dell’ELSA Laboratory (da [41]).
98

Capitolo 6
L’elenco dei test esaminati è riportato nella seguente tabella (Tabella 6.IV):
N° del test Nome del Test Tipo di prova
1 d68 SNAP BACK
2 d79 SNAP BACK con TMD bloccato
3 d80 SNAP BACK con TMD bloccato
Tabella 6.IV: Elenco dei test effettuati.
L’elaborazione dei dati riguardanti le storie temporali di accelerazione e spostamento si
è sviluppata secondo le seguenti fasi:
dal sito dell’ELSA si è acceduto ai dati contenuti nella cartella del progetto
Dispass ELSA;
di tutte le strutture testate si è considerato il Baby-Frame in diverse condizioni
costruttive (per esempio: Steel Unprotected Frame dove la struttura non presenta
delle protezioni quali smorzatori o dissipatori);
di tutte le prove effettuate si sono considerate solo quelle di tipo dinamico;
per ogni prova presa in considerazione si sono scaricati singolarmente, cioè uno
alla volta, i dati relativi alle storie temporali di spostamento, vi sono anche test
nei quali vengono fornite le storie temporali di velocità ed accelerazione. I test
considerati in questa sede presentavano solo dati di spostamento;
per ogni test considerato si è provveduto ad effettuare un’analisi del contenuto in
frequenza del segnale caricando i valori degli spostamenti della struttura in un
file di dati elaborato dal programma“Carica Andres”(per la cui descrizione si
rimanda al Capitolo 5);
dall’analisi in frequenza del segnale si sono ricavati i parametri modali della
struttura, ovvero le sue frequenze proprie, a partire dai dati sperimentali;
dai parametri modali della struttura, tramite il primo metodo di ottimizzazione
(descritto nel Capitolo 4), si è risaliti alla sua matrice di rigidezza.
Ogni test dinamico considerato ha avuto una durata complessiva pari a 135.84 s, le
storie temporali di spostamento della struttura sono state acquisite con un intervallo di
campionamento pari a 0.005 s.
99

Capitolo 6
Qui di seguito sono state riportate, nelle Figure 6.X, 6.XI, 6.XII, le funzioni densità
spettrale di potenza (PSD) dei segnali di spostamento dei test d68, d79, d80. In questo
caso, rispetto allo studio benchmark, ogni segnale processato è stato“lisciato”
applicando una funzione, chiamata“smoothv”, la quale smussa i picchi delle PSD
utilizzando una finestra pesata. Tale operazione consiste nel sostituire ad un certo
numero di punti un unico punto, in questo modo si ottiene una visione più chiara dei
risultati.
Dall’analisi congiunta delle densità spettrali di potenza dei tre test considerati si può
notare una certa somiglianza negli andamenti delle PSD dei test d79 e d80. Ciò si
verifica in virtù del fatto che tali test sono stati effettuati sul Baby-Frame nelle stesse
condizioni strutturali e cioè in presenza di uno smorzatore a massa accordata (TMD:
Tuned Mass Damper) bloccato posto al terzo piano. La diversa altezza dei picchi in tali
test è causata dal diverso contenuto energetico della prova e cioè dalla maggiore o
minore eccitazione impressa alla struttura. L’andamento pressoché simmetrico dei
picchi in corrispondenza delle frequenze di risonanza fa supporre un comportamento
lineare della struttura.
Il test d68 è stato effettuato in assenza di smorzatore e di altri dispositivi di protezione.
In tutti e tre i casi l’analisi dei segnali è risultata abbastanza semplice in quanto le curve
di risposta (PSD) trovate presentano picchi di risonanza sufficientemente separati e privi
di interferenza, il che assicura il disaccoppiamento dei modi della struttura e permette
una stima diretta dei parametri modali.
In queste condizioni per determinare le frequenze proprie si è usato lo stesso
procedimento descritto per la struttura benchmark. Ovvero le frequenze proprie della
struttura, nelle varie prove considerate, si sono trovate in corrispondenza dei picchi dei
diagrammi delle densità spettrali di potenza (PSD) in funzione della frequenza, ottenuti
per i punti di misura in corrispondenza dei quali si ha la massima amplificazione.
100

Capitolo 6
s p o s t 1
s p o s t 2
s p o s t 3
0 5 1 0 1 5 2 01 0
- 6
1 0- 4
1 0- 2
1 00
1 02
1 04
1 06
F r e q u e n c y [ H z ]
sPS
D
1 ° p i a n o2 ° p i a n o3 ° p i a n o
Figura 6.X: Densità spettrale di potenza dei segnali di spostamento del test d68.
s p o s t 1
s p o s t 2
s p o s t 3
0 5 1 0 1 5 2 01 0
- 6
1 0- 4
1 0- 2
1 00
1 02
F r e q u e n c y [ H z ]
sPS
D
1 ° p i a n o2 ° p i a n o3 ° p i a n o
Figura 6.XI: Densità spettrale di potenza dei segnali di spostamento del test d79.
101

Capitolo 6
s p o s t 1
s p o s t 2
s p o s t 3
0 5 1 0 1 5 2 01 0
- 6
1 0- 4
1 0- 2
1 00
1 02
F r e q u e n c y [ H z ]
sPS
D
1 ° p i a n o2 ° p i a n o3 ° p i a n o
Figura 6.XII: Densità spettrale di potenza dei segnali di spostamento del test d80.
Le frequenze naturali rilevate quindi graficamente per ogni test sono state riportate nella
seguente tabella (Tabella 6.V):
N° del TEST FREQUENZE [Hz]d68 2.9592 9.952 14.7374
d79 2.9371 9.8994 14.774
d80 2.9521 9.9429 14.7243
Tabella 6.V: Frequenze ottenute graficamente per ogni test.
A partire da questi valori dei parametri modali della struttura l’algoritmo evolutivo ha
identificato la matrice di rigidezza rispettivamente per ogni test. I valori assunti per i
parametri fondamentali dell’algoritmo sono stati riportati nella Tabella 6.VI mentre i
risultati ottenuti dalla soluzione del problema di ottimizzazione sono i seguenti:
• matrice di rigidezza test d68 [N/m]
−−−
−
3532400035324000035324000443210008998000
0899800034995000
102

Capitolo 6
• matrice di rigidezza test d79 [N/m]
−−−
−
3559200035592000035592000442600008834000
0883400034550000
• matrice di rigidezza test d80 [N/m]
−−−
−
3528100035281000035281000442140008933000
0893300034930000
Test considerato Numero di individui Numero di iterazioni
Test d68 30 1200
Test d79 30 1000
Test d80 30 1500
Tabella 6.VI: Valori dei parametri dell’algoritmo evolutivo.
Dal confronto tra i dati riportati nella Tabella 6.VI con quelli della Tabella 5.I del
capitolo precedente, si può notare come il processo di ottimizzazione eseguito per la
struttura Baby-Frame, rispetto a quello eseguito per la struttura benchmark, ha
comportato sia un numero minore di individui della popolazione che un numero minore
di iterazioni. Questa diminuzione nei valori dei parametri fondamentali dell’algoritmo è
dovuta ad una diminuzione delle variabili da identificare. Infatti per la struttura Baby-
Frame, sempre nell’ipotesi di modellizzazione shear-type, il numero di variabili da
identificare è pari a tre, mentre nella struttura benchmark è pari a quattro.
Da ciò si può quindi osservare come i valori assunti per i parametri fondamentali
dell’algoritmo (numero di individui della popolazione e numero di iterazioni) siano
strettamente correlati al numero di variabili da identificare. Come già detto in
precedenza però, non si hanno a disposizione formule matematiche ben precise che
esprimano tale correlazione.
103
Capitolo 6
La configurazione migliore dei parametri di ottimizzazione in funzione delle variabili da
identificare può quindi essere determinata solo sulla base di considerazioni euristiche,
ovvero dettate dall’esperienza.
Le tre matrici così identificate dall’algoritmo evolutivo sono state poi smembrate in
ogni singolo loro elemento, attraverso la routine di MATLAB riportata nel capitolo
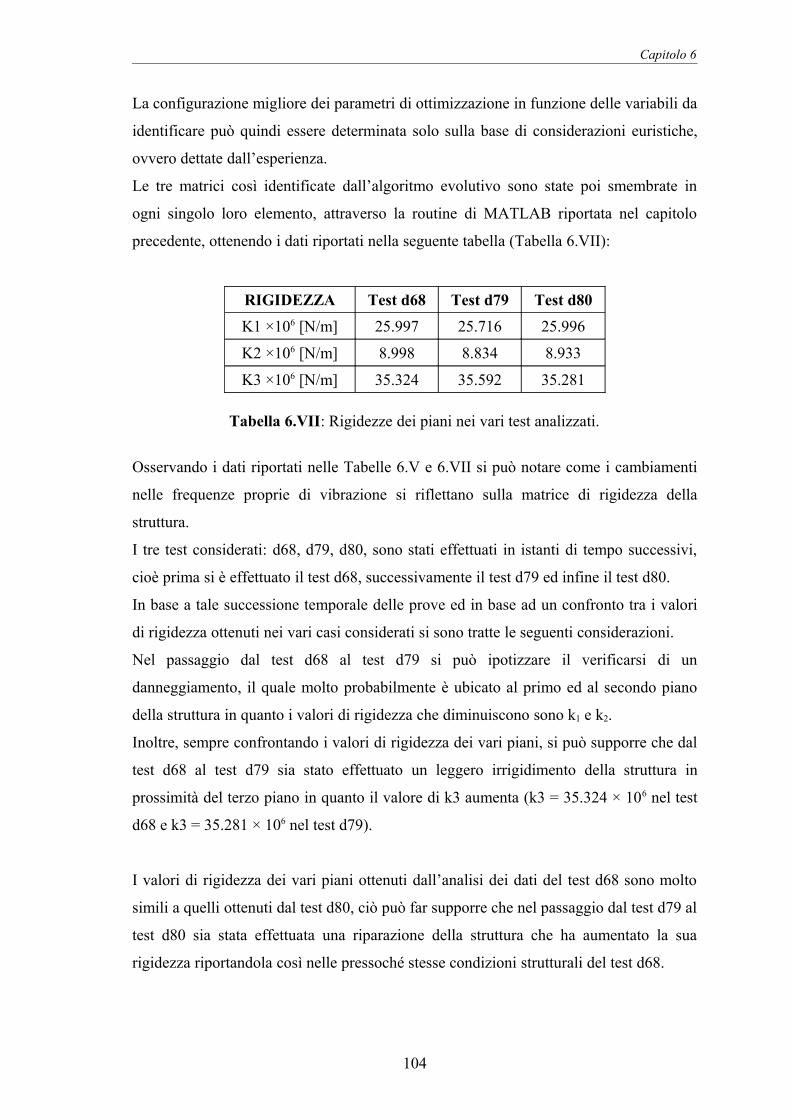
precedente, ottenendo i dati riportati nella seguente tabella (Tabella 6.VII):
RIGIDEZZA Test d68 Test d79 Test d80K1 ×106 [N/m] 25.997 25.716 25.996
K2 ×106 [N/m] 8.998 8.834 8.933
K3 ×106 [N/m] 35.324 35.592 35.281
Tabella 6.VII: Rigidezze dei piani nei vari test analizzati.
Osservando i dati riportati nelle Tabelle 6.V e 6.VII si può notare come i cambiamenti
nelle frequenze proprie di vibrazione si riflettano sulla matrice di rigidezza della
struttura.
I tre test considerati: d68, d79, d80, sono stati effettuati in istanti di tempo successivi,
cioè prima si è effettuato il test d68, successivamente il test d79 ed infine il test d80.
In base a tale successione temporale delle prove ed in base ad un confronto tra i valori
di rigidezza ottenuti nei vari casi considerati si sono tratte le seguenti considerazioni.
Nel passaggio dal test d68 al test d79 si può ipotizzare il verificarsi di un
danneggiamento, il quale molto probabilmente è ubicato al primo ed al secondo piano
della struttura in quanto i valori di rigidezza che diminuiscono sono k1 e k2.
Inoltre, sempre confrontando i valori di rigidezza dei vari piani, si può supporre che dal
test d68 al test d79 sia stato effettuato un leggero irrigidimento della struttura in
prossimità del terzo piano in quanto il valore di k3 aumenta (k3 = 35.324 × 106 nel test
d68 e k3 = 35.281 × 106 nel test d79).
I valori di rigidezza dei vari piani ottenuti dall’analisi dei dati del test d68 sono molto
simili a quelli ottenuti dal test d80, ciò può far supporre che nel passaggio dal test d79 al
test d80 sia stata effettuata una riparazione della struttura che ha aumentato la sua
rigidezza riportandola così nelle pressoché stesse condizioni strutturali del test d68.
104

Capitolo 6
I risultati fin qui esposti mostrano quindi come vi sia una diretta correlazione tra
danneggiamento e caratteristiche modali poiché i valori delle frequenze di vibrazione
rilevate sia numericamente che sperimentalmente diminuiscono costantemente al
progredire del danneggiamento.
Note quindi le frequenze naturali della struttura, l’esistenza e la posizione del danno
vengono determinati confrontando le rigidezze degli elementi strutturali nel caso integro
e nel caso danneggiato. Il processo di identificazione del danno può essere, di
conseguenza, visto come una doppia identificazione strutturale della matrice di
rigidezza, eseguita a due diversi istanti temporali (struttura integra, struttura
danneggiata), dal cui confronto è possibile individuare le mutazioni intercorse nella
struttura.
Non è stato riportato, per ognuno dei casi di danno considerati, il confronto tra i valori
di Vgen e Vexact in quanto essi sono risultati essere identici fino alla quarta cifra decimale.
105